A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging


Abstract
1. Introduction
2. Background on UWB Based Ranging
2.1. LOS Scenario
2.2. NLOS Scenario
3. Probabilistic Ranging Error Mitigation
3.1. Building UWB Ranging Sensor Models
- TOA model , where represents the communication obstruction and material scenario, d is the true Euclidean distance between two UWB communication nodes, and denotes measured distance through TOA.
- RSS model , where s has been previously defined; represents the measured received signal strength (RSS).
3.2. Bayesian Filtering Formulation for Ranging Error Mitigation
3.2.1. Prediction
3.2.2. Update
3.3. Bayesian Filtering Formulation for Mobile Target Tracking in a Wireless Sensor Network
3.3.1. Prediction
- The target moves independently in the field, which means the current target state is only dependent on the last state, i.e., the Markov assumption. This implies that
- The transitions of obstruction scenario between the target and each reference point are independent from one another, which means , where is the transition function of that is conditional on the previous state of the target
3.3.2. Update
4. Experimental Results and Analysis
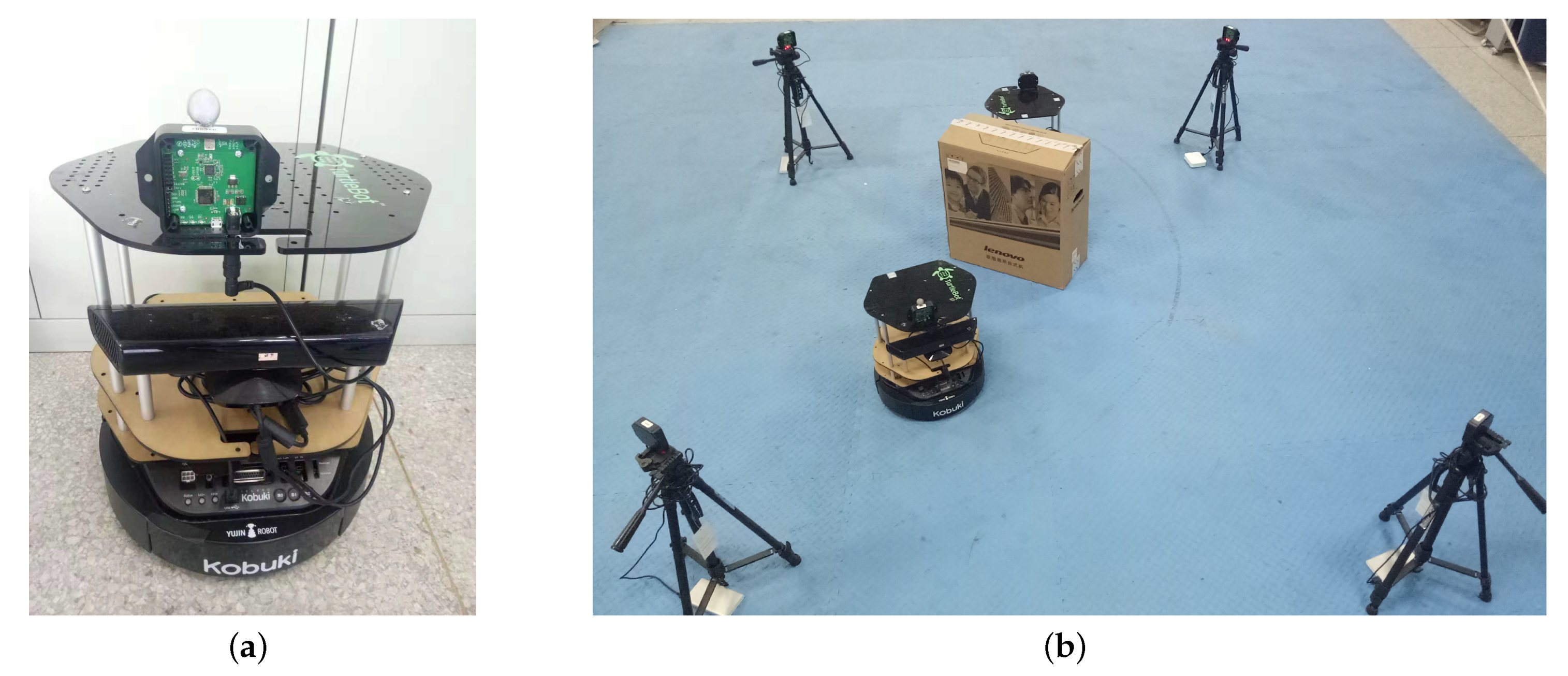
4.1. Experimental Platform
4.2. Inter-Robot Ranging Experiment Results
4.3. Mobile Robot Tracking Experiment Results
4.4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| UWB | ultra-wideband |
| LOS | line-of-sight |
| NLOS | non-line-of-sight |
| RSS | received signal strength |
| TOA | time of arrival |
| GNSS | global navigation satellite system |
| KF | Kalman filter |
| P2P | peer-to-peer |
| TDOA | time difference of arrival |
| ROS | robot operating system |
| RGB-D | red green blue and depth |
| CTRV | constant turn rate and velocity |
| RMSE | root mean squared error |
| HDOP | horizontal dilution of precision |
References
- Huang, Q.; Luo, R. Research on an active cooperative localization method for multiple mobile robots. Acta Electron. Sin. 2010, 38, 2644–2648. [Google Scholar]
- Lu, W.; Sun, X.; Ji, Y. Research and implementation of GPS pseudo satellite high precision indoor positioning technology. Appl. Electron. Tech. 2018, 44, 36–39. [Google Scholar]
- Shan, M.; Worrall, S.; Nebot, E. Nonparametric cooperative tracking in mobile Ad-Hoc networks. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 423–430. [Google Scholar]
- Li, J.; Cui, X.; Wu, C. Study on the UWB location method based-on the mono-station antenna area. Electron. Meas. Technol. 2013, 36, 14–17. [Google Scholar]
- Ferreira, A.G.; Fernandes, D.; Catarino, A.P. Performance analysis of ToA-based positioning algorithms for static and dynamic targets with low ranging measurements. Sensors 2017, 17, 1915. [Google Scholar] [CrossRef] [PubMed]
- Monica, S.; Ferrari, G. Improving UWB-based localization in IoT scenarios with statistical models of distance error. Sensors 2018, 18, 1592. [Google Scholar] [CrossRef] [PubMed]
- Ridolfi, M.; Van de Velde, S.; Steendam, H.; De Poorter, E. Analysis of the scalability of UWB indoor localization solutions for high user densities. Sensors 2018, 18, 1875. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Zhang, H.; Sui, X. Error analysis and weakening of UWB TW-TOA ranging. Bull. Surv. Mapp. 2017, 9, 19–22. [Google Scholar]
- Wann, C.-D. Kalman filtering for NLOS mitigation and target tracking in indoor wireless environment. In Kalman Filter; InTech: Rijeka, Croatia, 2010. [Google Scholar]
- Wann, C.-D.; Hsueh, C.-S. Non-line of sight error mitigation in ultra-wideband ranging systems using biased Kalman filtering. J. Signal Process. Syst. 2011, 64, 389–400. [Google Scholar] [CrossRef]
- Li, Q.; Wu, Z.; Li, J. NLOS error elimination algorithm based on improved Kalman filter. J. Electron. Meas. Instrum. 2015, 29, 1513–1519. [Google Scholar]
- Li, J.; Liu, J. Three ways to eliminate NLOS errors in TOA using Kalman filter. J. Commun. 2005, 26, 130–135. [Google Scholar]
- Mucchi, L.; Marcocci, P. A new parameter for channel identification in UWB indoor environments. In Proceedings of the International Conference on Computer Communications & Networks, Honolulu, HI, USA, 13–16 August 2007; pp. 419–423. [Google Scholar]
- Wu, S.; Zhang, Q.; Zhang, N. Identification of NLOS state in IR-UWB ranging. J. Electron. Inf. Technol. 2008, 30, 2541–2546. [Google Scholar] [CrossRef]
- Yan, B.F.; Mao, Q.Z. An UWB indoor positioning algorithm based on Kalman filtering. Transducer Microsyst. Technol. 2017, 36, 137–143. [Google Scholar]
- Le, B.L.; Ahmed, K.; Tsuji, H. Mobile location estimator with NLOS mitigation using Kalman filtering. In Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 16–20 March 2003; pp. 1969–1973. [Google Scholar]
- Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS identification and mitigation for localization based on UWB experimental data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar]
- Nguyen, T.V.; Jeong, Y.; Shin, H.; Win, M.Z. Machine learning for wideband localization. IEEE J. Sel. Areas Commun. 2015, 33, 1357–1380. [Google Scholar] [CrossRef]
- Wymeersch, H.; Maranò, S.; Gifford, W.M.; Win, M.Z. A machine learning approach to ranging error mitigation for UWB localization. IEEE Trans. Commun. 2012, 60, 1719–1728. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environment. IEEE Trans. Veh. Technol. 2018, 68, 686–699. [Google Scholar] [CrossRef]
- Li, S. Research on LOS/NLOS ranging and positioning method based on UWB. Master’s Thesis, Hubei University of Technology, Wuhan, China, 2017. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subcase | Before Mitigation (mm) | TOA Model Only (mm) | Deterministic ID (mm) | Proposed Method (mm) |
|---|---|---|---|---|
| LOS | 16.90 | 32.63 | 15.24 | 8.19 |
| 15.41 | 23.57 | 12.23 | 7.42 | |
| 135.53 | 104.83 | 85.40 | 72.10 | |
| 57.33 | 57.55 | 33.00 | 28.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, J.; Gao, K.; Shan, M.; Yan, B.; Liu, D. A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging. Sensors 2019, 19, 440. https://doi.org/10.3390/s19030440
Xin J, Gao K, Shan M, Yan B, Liu D. A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging. Sensors. 2019; 19(3):440. https://doi.org/10.3390/s19030440
Chicago/Turabian StyleXin, Jing, Kaiyuan Gao, Mao Shan, Bo Yan, and Ding Liu. 2019. "A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging" Sensors 19, no. 3: 440. https://doi.org/10.3390/s19030440
APA StyleXin, J., Gao, K., Shan, M., Yan, B., & Liu, D. (2019). A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging. Sensors, 19(3), 440. https://doi.org/10.3390/s19030440