Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction


Abstract
1. Introduction
2. Method
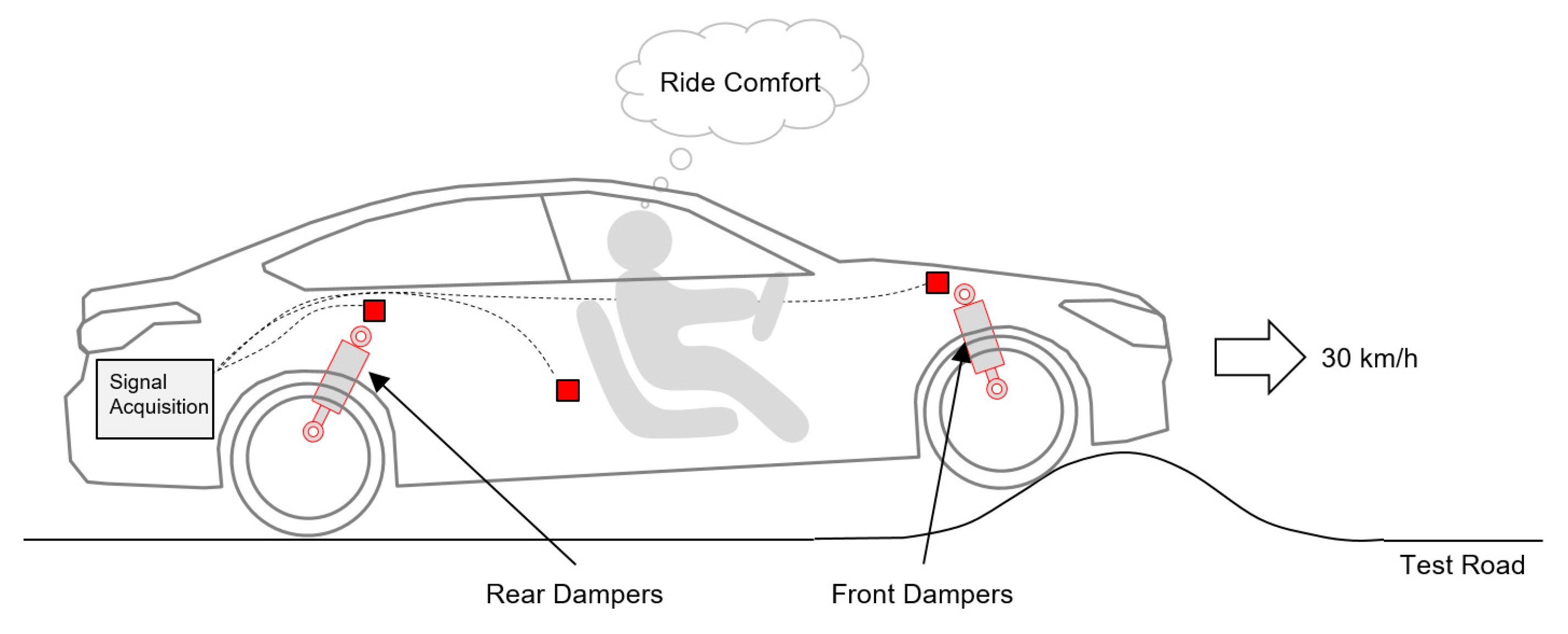
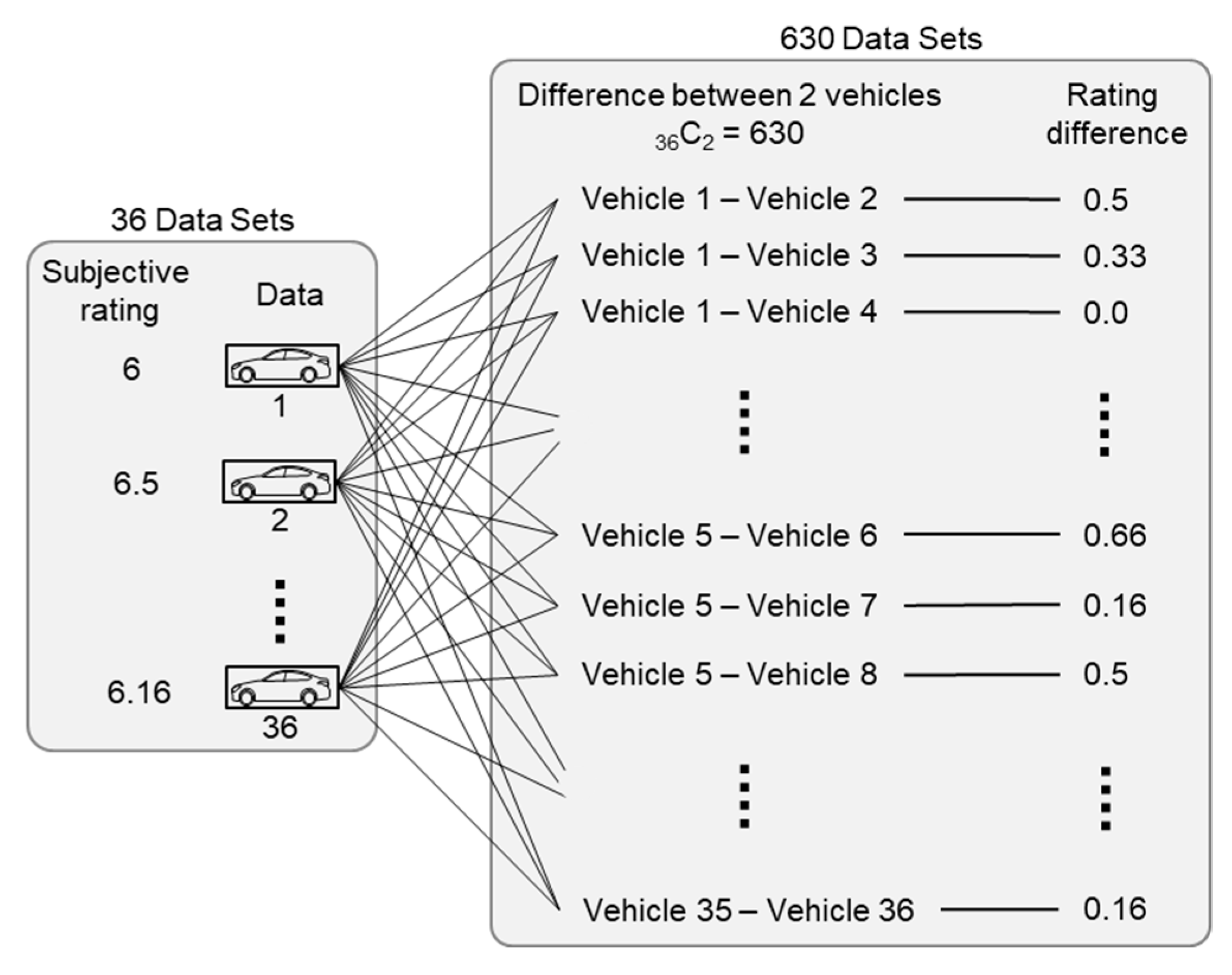
2.1. Data Collection
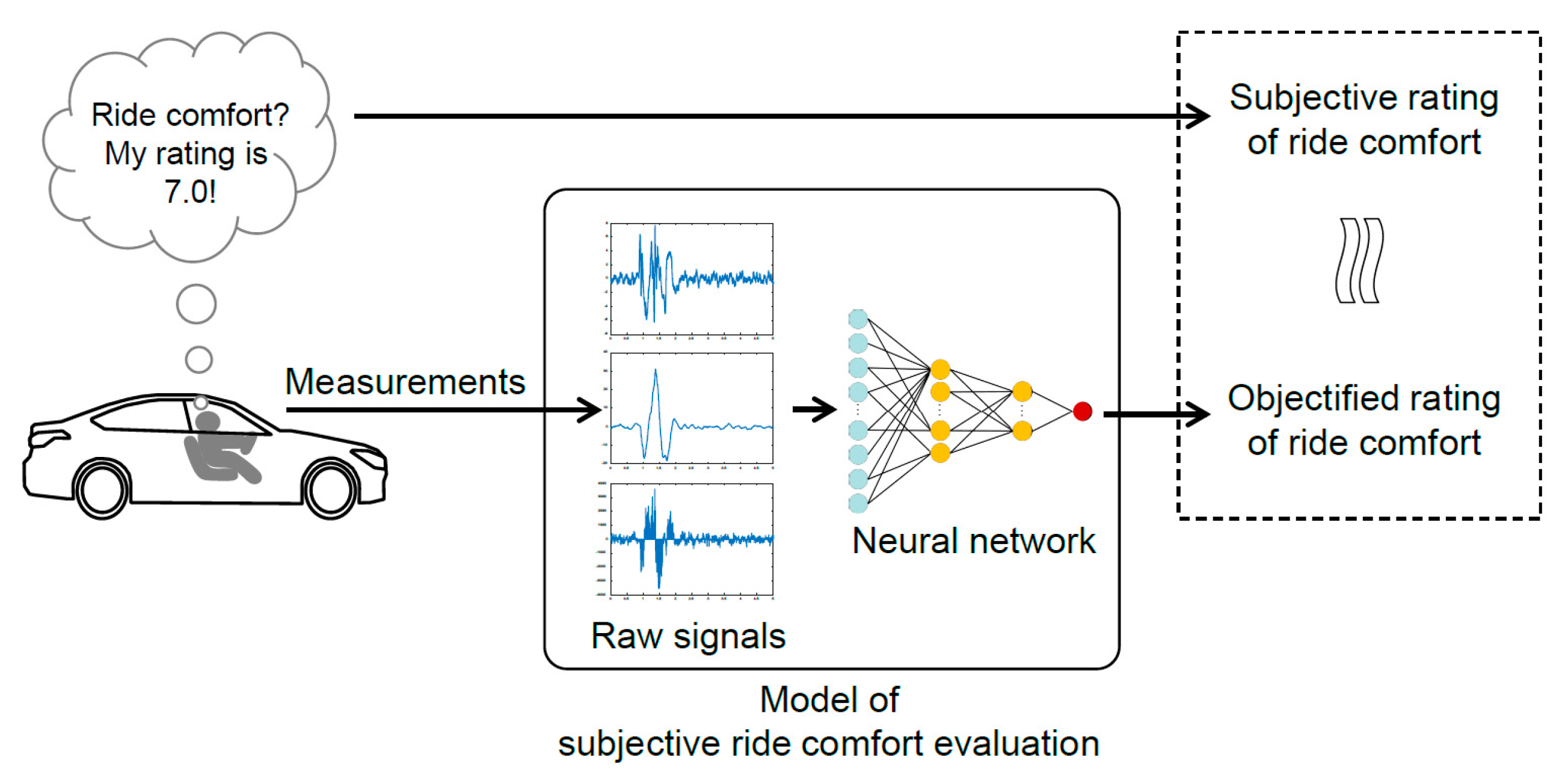
2.2. Ride Comfort Evaluation Model
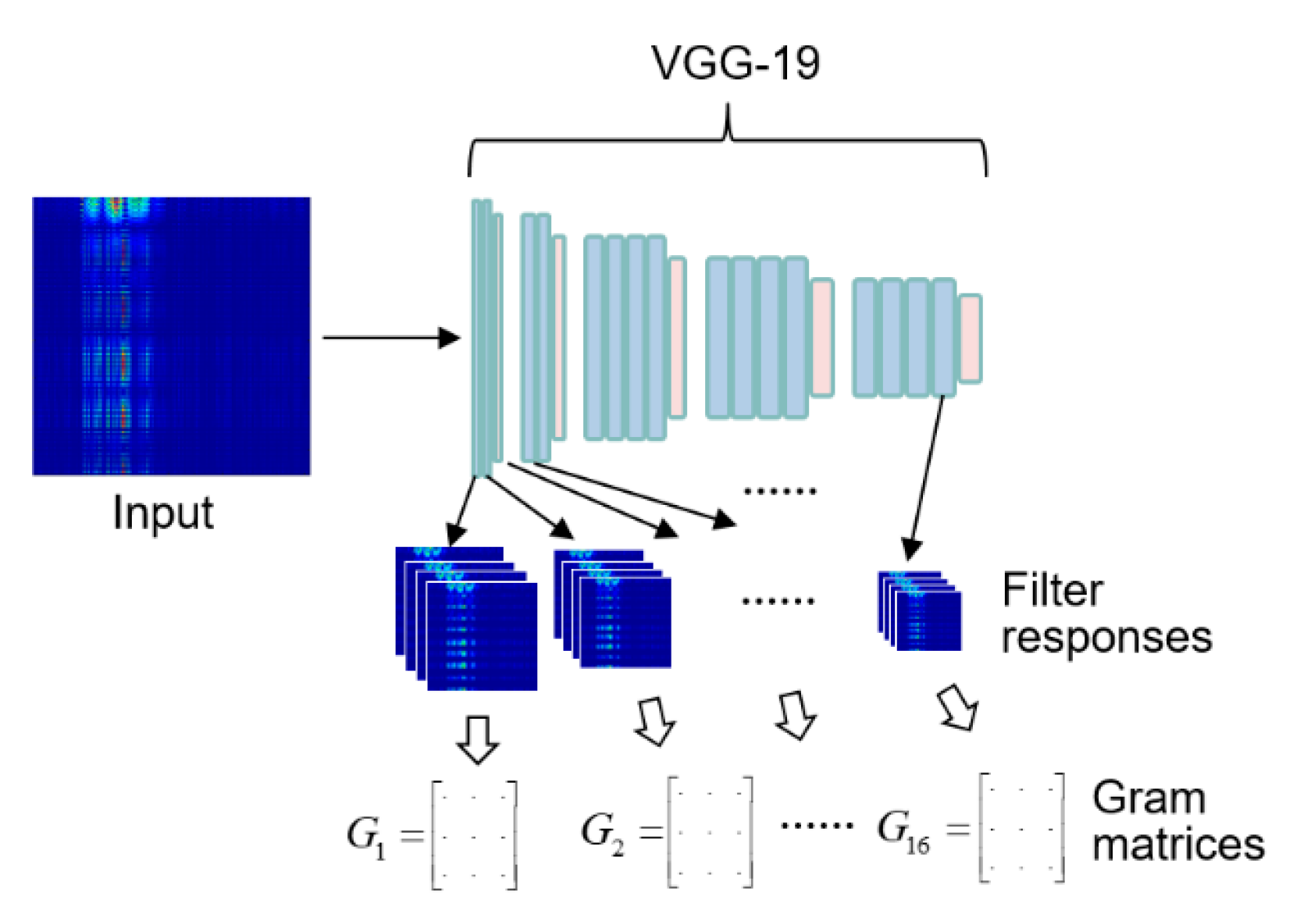
2.2.1. Extraction of Ride Comfort from Measurements
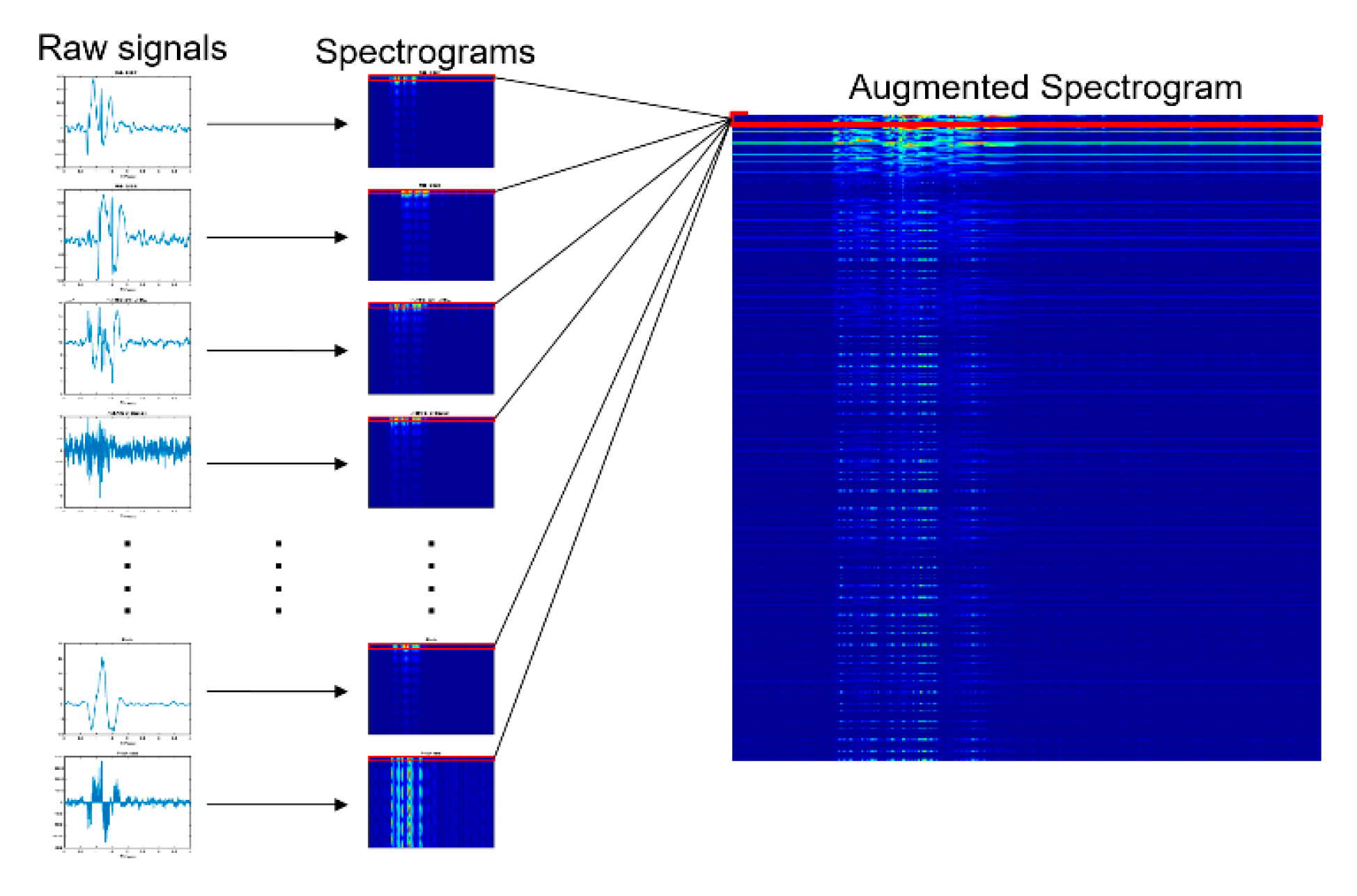
2.2.2. Preprocessing Input Data
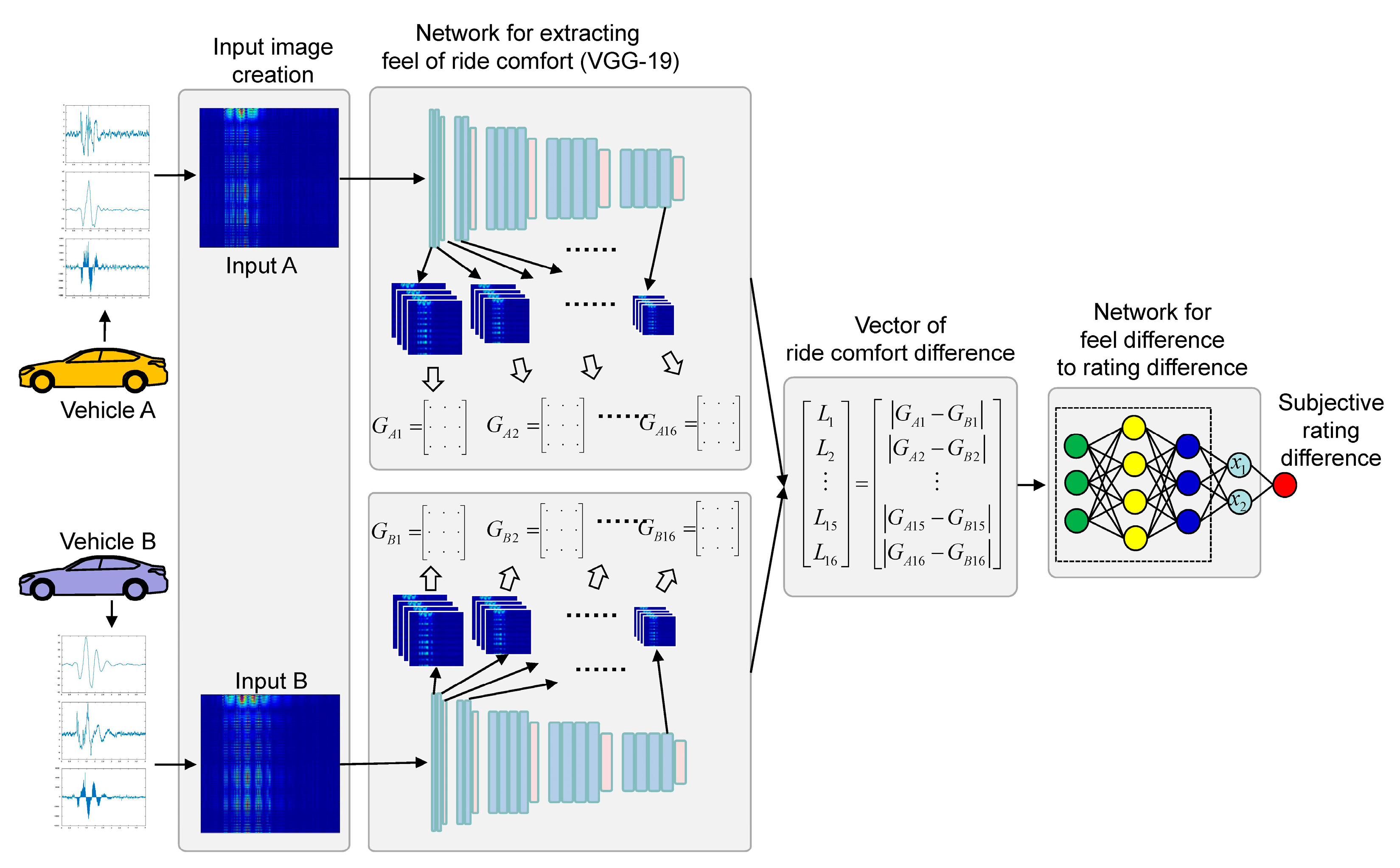
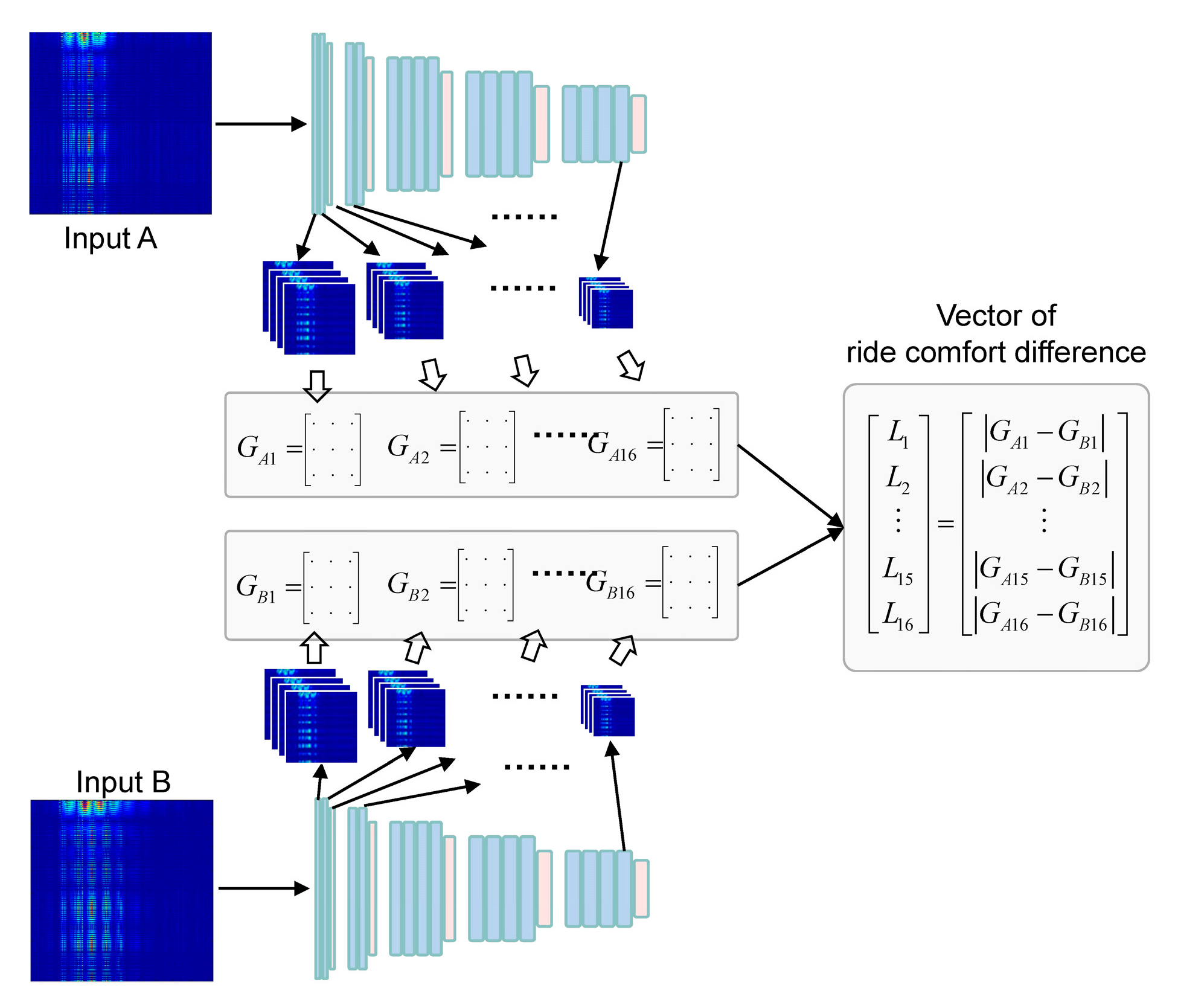
2.2.3. Vector of Ride Comfort Difference
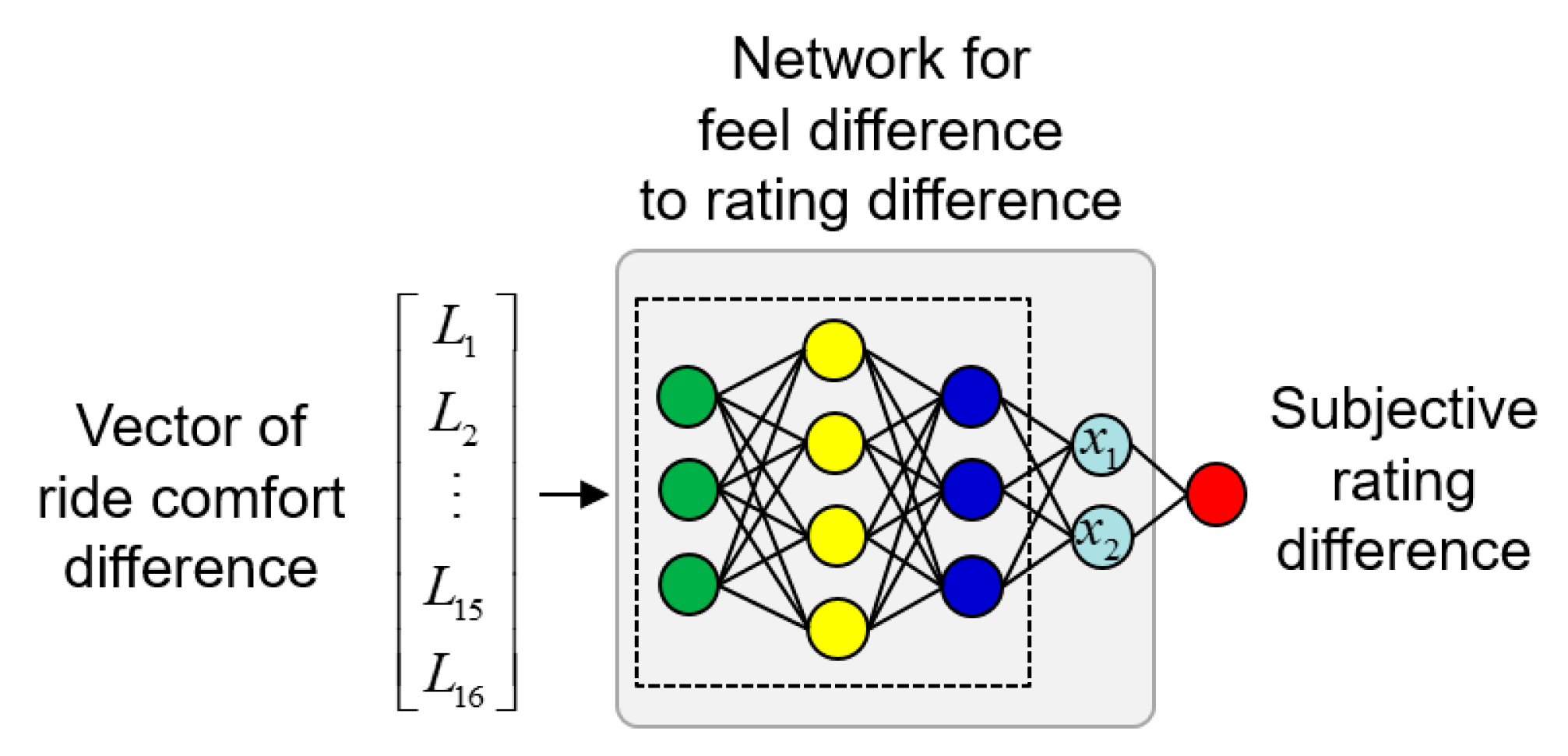
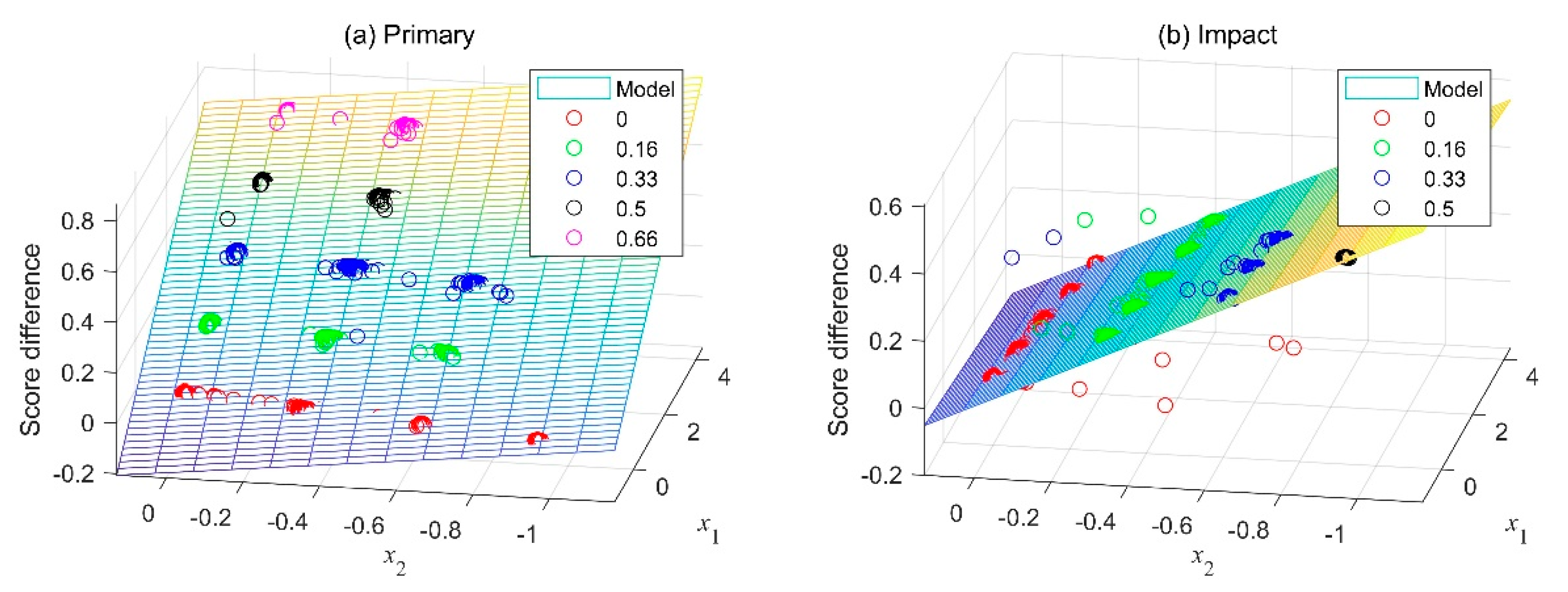
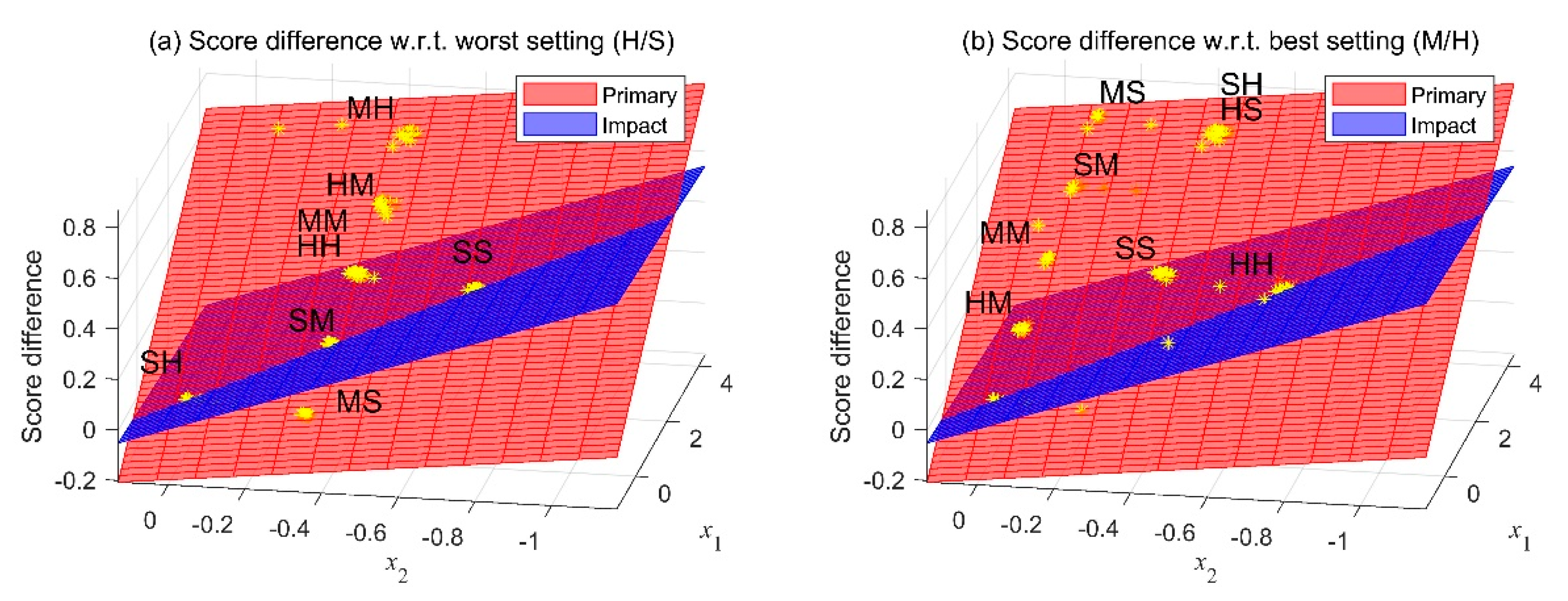
2.2.4. Comparative Model of Ride Comfort
3. Results and Discussion
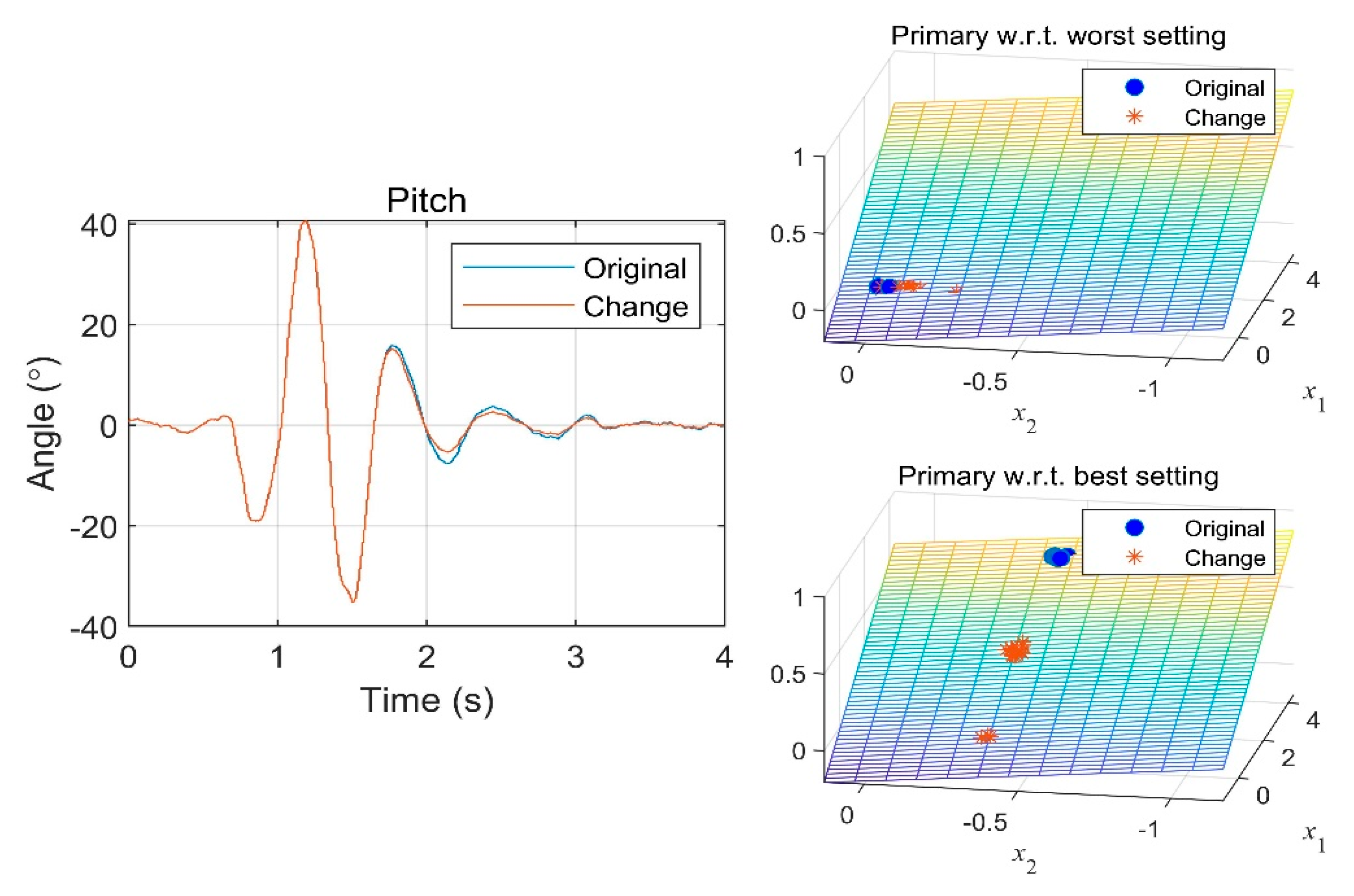
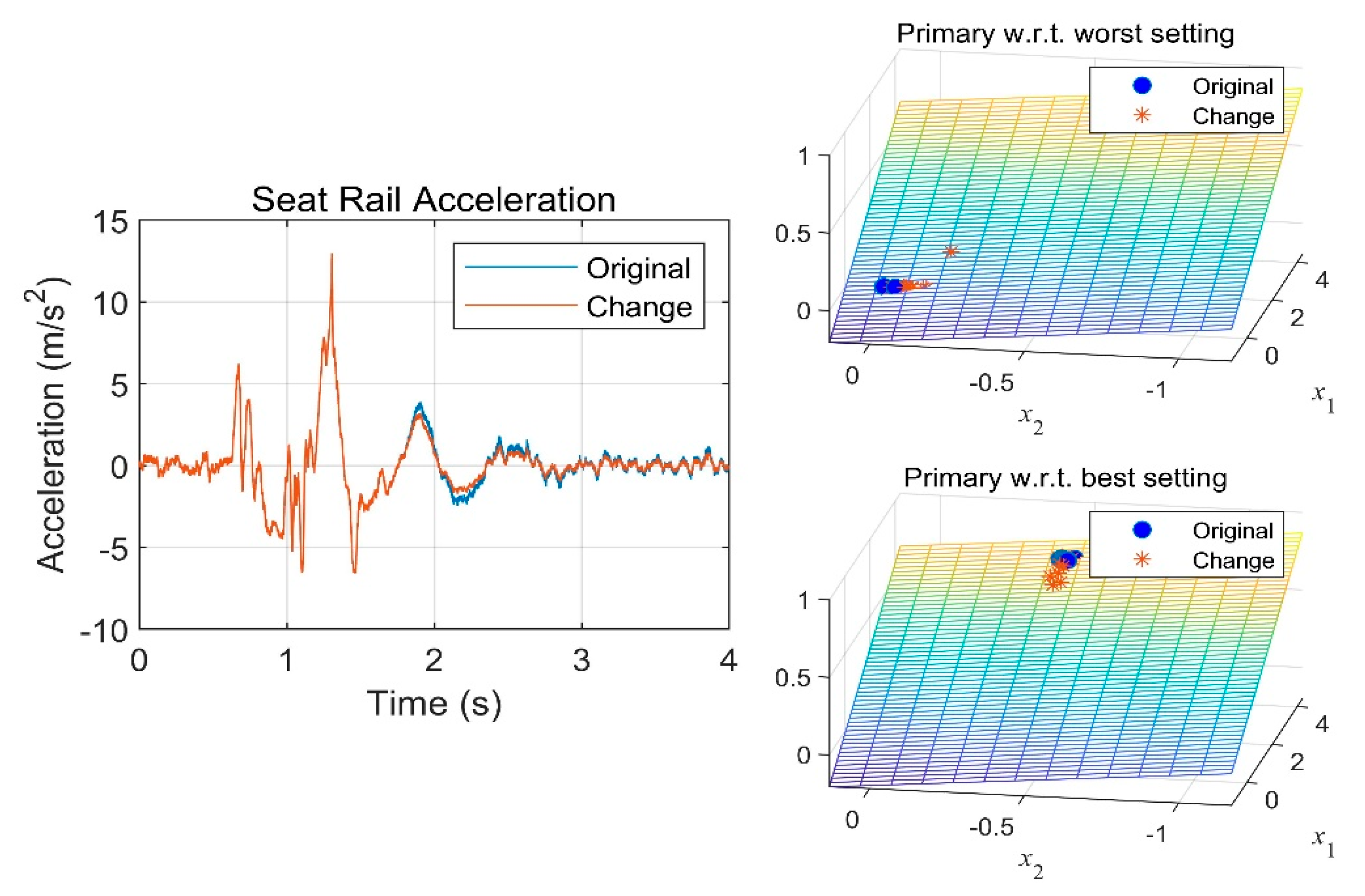
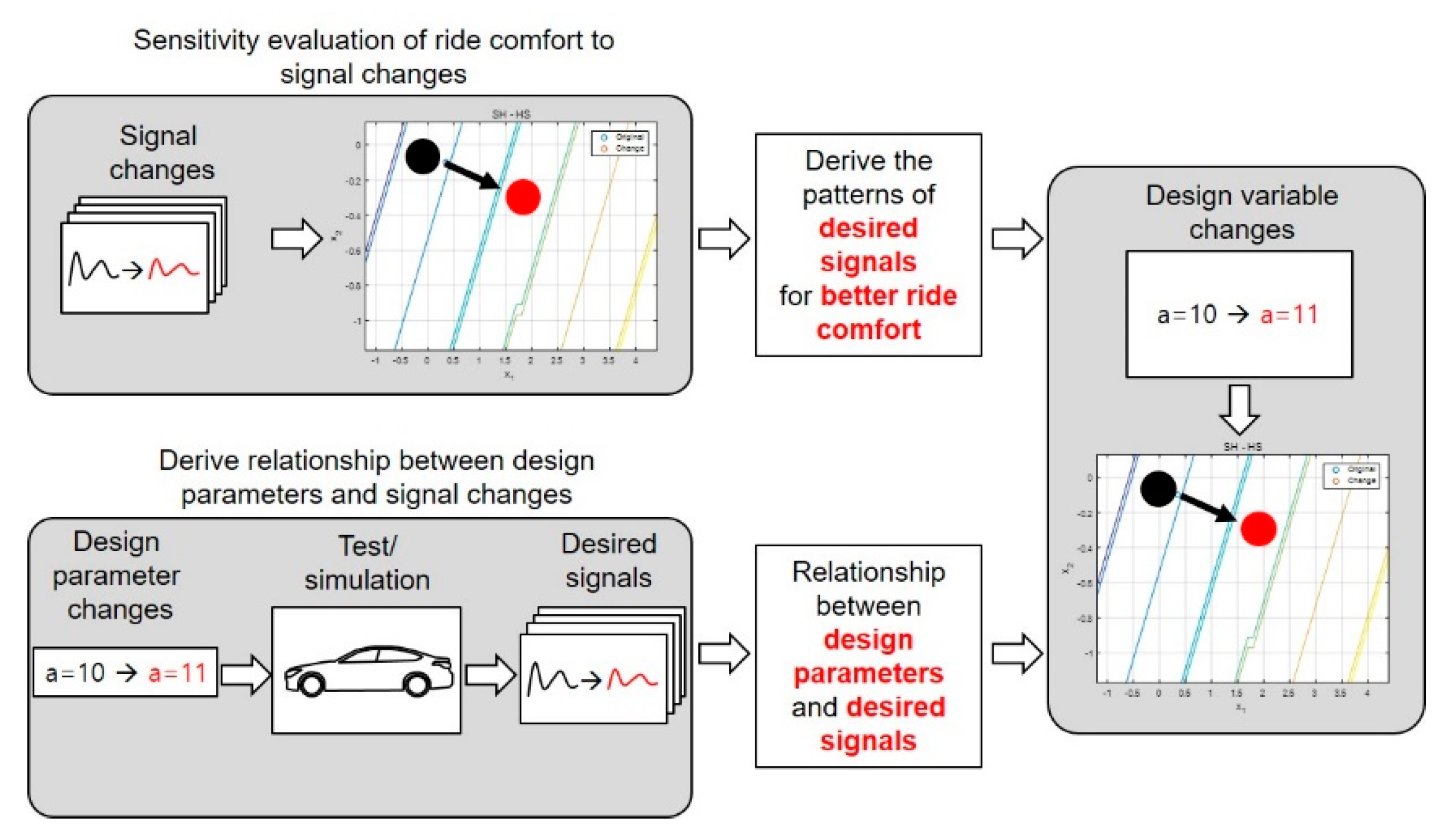
4. Case Study for Use of the Correlation Model
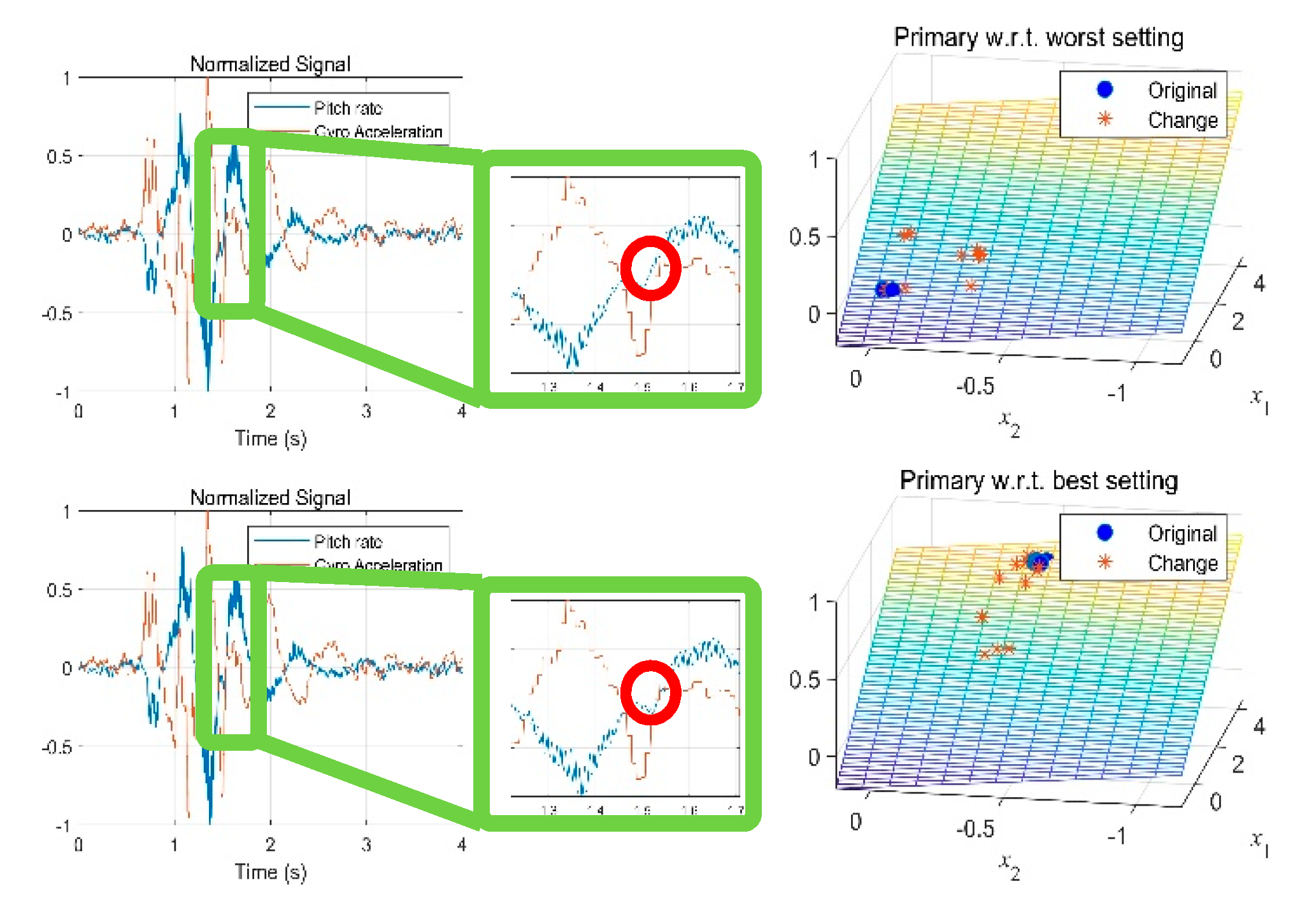
Sensitivity Evaluation of Signal Changes to Ride Comfort
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, C.; Chen, T. Aesthetic visual quality assessment of paintings. IEEE J. Sel. Top. Signal Process. 2009, 3, 236–252. [Google Scholar] [CrossRef]
- Hayn-Leichsenring, G.U.; Lehmann, T.; Redies, C. Subjective ratings of beauty and aesthetics: Correlations with statistical image properties in western oil paintings. I-Perception 2017, 8. [Google Scholar] [CrossRef] [PubMed]
- Jeon, J.Y.; You, J.; Chang, H.Y. Sound radiation and sound quality characteristics of refrigerator noise in real living environments. Appl. Acoust. 2007, 68, 1118–1134. [Google Scholar] [CrossRef]
- Lee, C.; Cho, Y.; Baek, B.; Lee, S.; Hwang, D.; Jo, K. Analyses of refrigerator noises. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 20–23 June 2005; pp. 1179–1184. [Google Scholar]
- Xin, Z.; Zhang, X.; Shi, G.; Lin, Y. Steering feel study on the performance of EPS. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5. [Google Scholar]
- Huang, F. G1 model of expressway ride comfort assessment. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation, Changsha, China, 13–14 March 2010; pp. 341–342. [Google Scholar]
- Zheng, Y.; Meng, F.; Zhang, Y. A new subjective assessment system for video quality. In Proceedings of the International Congress on Image and Signal Processing, Dalian, China, 14–16 October 2014; pp. 586–590. [Google Scholar]
- Park, H.-J.; Har, D.-H. Subjective image quality assessment based on objective image quality measurement factors. IEEE Trans. Consum. Electron. 2011, 57, 1176–1184. [Google Scholar] [CrossRef]
- Wang, E.M.-Y.; Shih, S.S.-Y. A study on thumb and index finger operated interface for personal mobile devices: Mobile phone keypad and joystick. In Proceedings of the International Conference on Industrial Engineering and Engineering Management, Beijing, China, 21–23 October 2009; pp. 766–770. [Google Scholar]
- Arima, M.; Tamura, Y.; Yoshihira, M. Evaluation of ride comfort of passenger craft. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 802–807. [Google Scholar]
- Sawabe, T.; Okajima, T.; Kanbara, M.; Hagita, N. Evaluating passenger characteristics for ride comfort in autonomous wheelchairs. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems, Yokohama, Japan, 16–19 October 2017; pp. 102–107. [Google Scholar]
- Zschocke, A.K.; Albers, A. Links between subjective and objective evaluations regarding the steering character of automobiles. Int. J. Automot. Technol. 2008, 9, 473–481. [Google Scholar] [CrossRef]
- Chabrier, E.; Grima, M. Subjective and objective vehicle tests, two parallel vehicle handling evaluations. In Proceedings of the FISITA 2012 World Automotive Congress, Beijing, China, 27–30 November 2012; pp. 1767–1775. [Google Scholar]
- Furusho, Y.; Kotani, K. Objective and subjective evaluation models of pencil still drawings for art education. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications, Sydney, Australia, 29 November–1 December 2017; pp. 1–5. [Google Scholar]
- Data, S.; Frigerio, F. Objective evaluation of handling quality. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 297–305. [Google Scholar] [CrossRef]
- Rothhämel, M.; Ijkema, J.; Drugge, L. A method to find correlations between steering feel and vehicle handling properties using a moving base driving simulator. Veh. Syst. Dyn. 2011, 49, 1837–1854. [Google Scholar] [CrossRef]
- Nybacka, M.; He, X.; Gil Gómez, G.L.; Bakker, E.; Drugge, L. Links between subjective assessments and objective metrics for steering. Int. J. Automot. Technol. 2014, 15, 893–907. [Google Scholar] [CrossRef]
- Nybacka, M.; He, X.; Su, Z.; Drugge, L.; Bakker, E. Links between subjective assessments and objective metrics for steering, and evaluation of driver ratings. Veh. Syst. Dyn. 2014, 52, 31–50. [Google Scholar] [CrossRef]
- Gil Gómez, G.L.; Nybacka, M.; Bakker, E.; Drugge, L. Findings from subjective evaluations and driver ratings of vehicle dynamics: Steering and handling. Veh. Syst. Dyn. 2015, 53, 1416–1438. [Google Scholar] [CrossRef]
- Gil Gómez, G.L.; Nybacka, M.; Bakker, E.; Drugge, L. Objective metrics for vehicle handling and steering and their correlations with subjective assessments. Int. J. Automot. Technol. 2016, 17, 777–794. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, W.; Gong, Z.; Sun, W. A new approach to vehicle shift quality subjective evaluation based on fuzzy logic and evidence theory. In Proceedings of the IEEE Conference on Industrial Electronics and Applications, Xian, China, 25–27 May 2009; pp. 2792–2795. [Google Scholar]
- Liu, Y.; Liu, Q.; Lv, C.; Zheng, M.; Ji, X. A Study on objective evaluation of vehicle steering comfort based on driver’s electromyogram and movement trajectory. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 41–49. [Google Scholar] [CrossRef]
- Varga, D. No-Reference Video Quality Assessment Based on the Temporal Pooling of Deep Features. Neural Process. Lett. 2019, 50, 1–14. [Google Scholar] [CrossRef]
- Mahendran, N.; Vincent, D.R.; Srinivasan, K.; Chang, C.-Y.; Garg, A.; Gao, L.; Reina, D.G. Sensor-Assisted Weighted Average Ensemble Model for Detecting Major Depressive Disorder. Sensors 2019, 19, 4822. [Google Scholar] [CrossRef] [PubMed]
- Weber, K.A.; Smith, A.C.; Wasielewski, M.; Eghtesad, K.; Upadhyayula, P.A.; Wintermark, M.; Hastie, T.J.; Parrish, T.B.; Mackey, S.; Elliott, J.M. Deep Learning Convolutional Neural Networks for the Automatic Quantification of Muscle Fat Infiltration Following Whiplash Injury. Sci. Rep. 2019, 9, 7973. [Google Scholar] [CrossRef] [PubMed]
- Yao, B.-G.; Peng, Y.-L.; Yang, Y.-J. Mechanical Measurement System and Precision Analysis for Tactile Property Evaluation of Porous Polymeric Materials. Polymers 2018, 10, 373. [Google Scholar] [CrossRef] [PubMed]
- Gil Gómez, G.L.; Nybacka, M.; Drugge, L.; Bakker, E. Machine learning to classify and predict objective and subjective assessments of vehicle dynamics: The case of steering feel. Veh. Syst. Dyn. 2018, 56, 150–171. [Google Scholar] [CrossRef]
- Mordvintsev, A.; Olah, C.; Tyka, M. DeepDream-A Code Example for Visualizing Neural Networks. Available online: https://ai.googleblog.com/2015/07/deepdream-code-example-for-visualizing.html (accessed on 10 September 2019).
- Gatys, L.A.; Ecker, A.S.; Bethge, M. Image style transfer using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2414–2423. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- SAE International Surface Vehicle Recommended Practice, Subjective Rating Scale for Vehicle Ride and Handling; SAE Standard J1441; SAE International: Warrendale, PA, USA, 2016.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating Scale | Event Type | ||
|---|---|---|---|
| Disturbance | Control | ||
| 10 | Desirable | Imperceptible | Excellent |
| 9 | Trace | ||
| 8 | A Little | Good | |
| 7 | Some | ||
| 6 | Moderate | Fair | |
| 5 | Borderline | ||
| 4 | Undesirable | Annoying | Poor |
| 3 | Strong | ||
| 2 | Severe | Very Poor | |
| 1 | Not Acceptable | ||
| Damper Settings (Front/Rear) | Primary Ride | Impact (Secondary Ride) |
|---|---|---|
| H/H | 6+ | 6 |
| H/M | 6+ to 7− | 6+ |
| H/S | 6 | 6 to 6+ |
| M/H | 7− | 6+ |
| M/M | 6+ | 6+ |
| M/S | 6 | 6+ |
| S/H | 6 | 6 to 6+ |
| S/M | 6 to 6+ | 6+ |
| S/S | 6+ | 6+ to 7− |
| Cases | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Pitch rate reduction | O | X | X | O | O | X | O |
| Acceleration reduction | X | O | X | O | X | O | O |
| Phase lag reduction | X | X | O | X | O | O | O |
| Improvement of primary ride comfort | Y | N | Y | Y | Y | Y | Y |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Jeong, M.; Bae, B.; Ahn, C. Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction. Sensors 2019, 19, 5407. https://doi.org/10.3390/s19245407
Kim D, Jeong M, Bae B, Ahn C. Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction. Sensors. 2019; 19(24):5407. https://doi.org/10.3390/s19245407
Chicago/Turabian StyleKim, Donggyun, MyeonGyu Jeong, ByungGuk Bae, and Changsun Ahn. 2019. "Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction" Sensors 19, no. 24: 5407. https://doi.org/10.3390/s19245407
APA StyleKim, D., Jeong, M., Bae, B., & Ahn, C. (2019). Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction. Sensors, 19(24), 5407. https://doi.org/10.3390/s19245407