OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres


 ,
,
Abstract
:1. Introduction
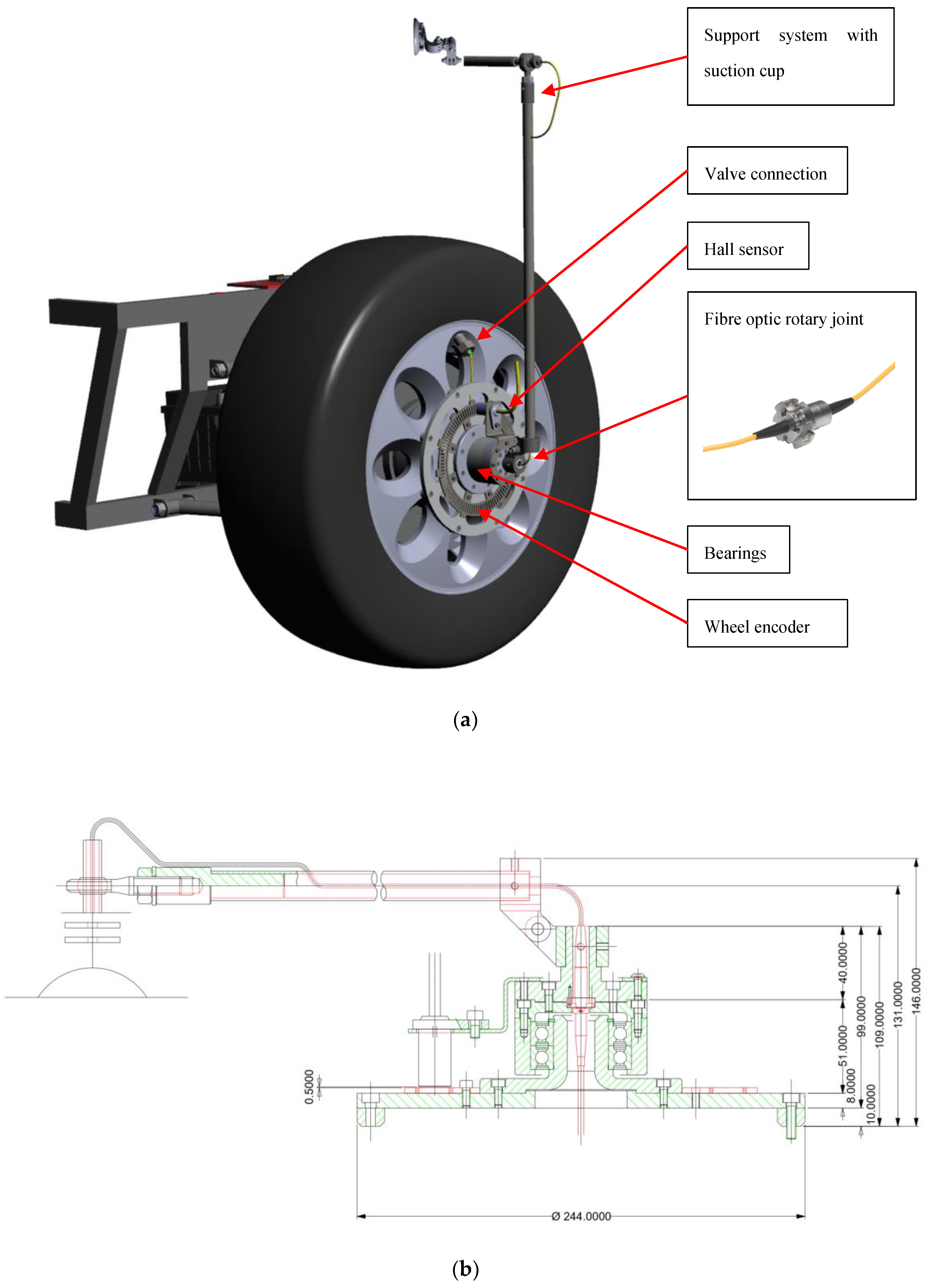
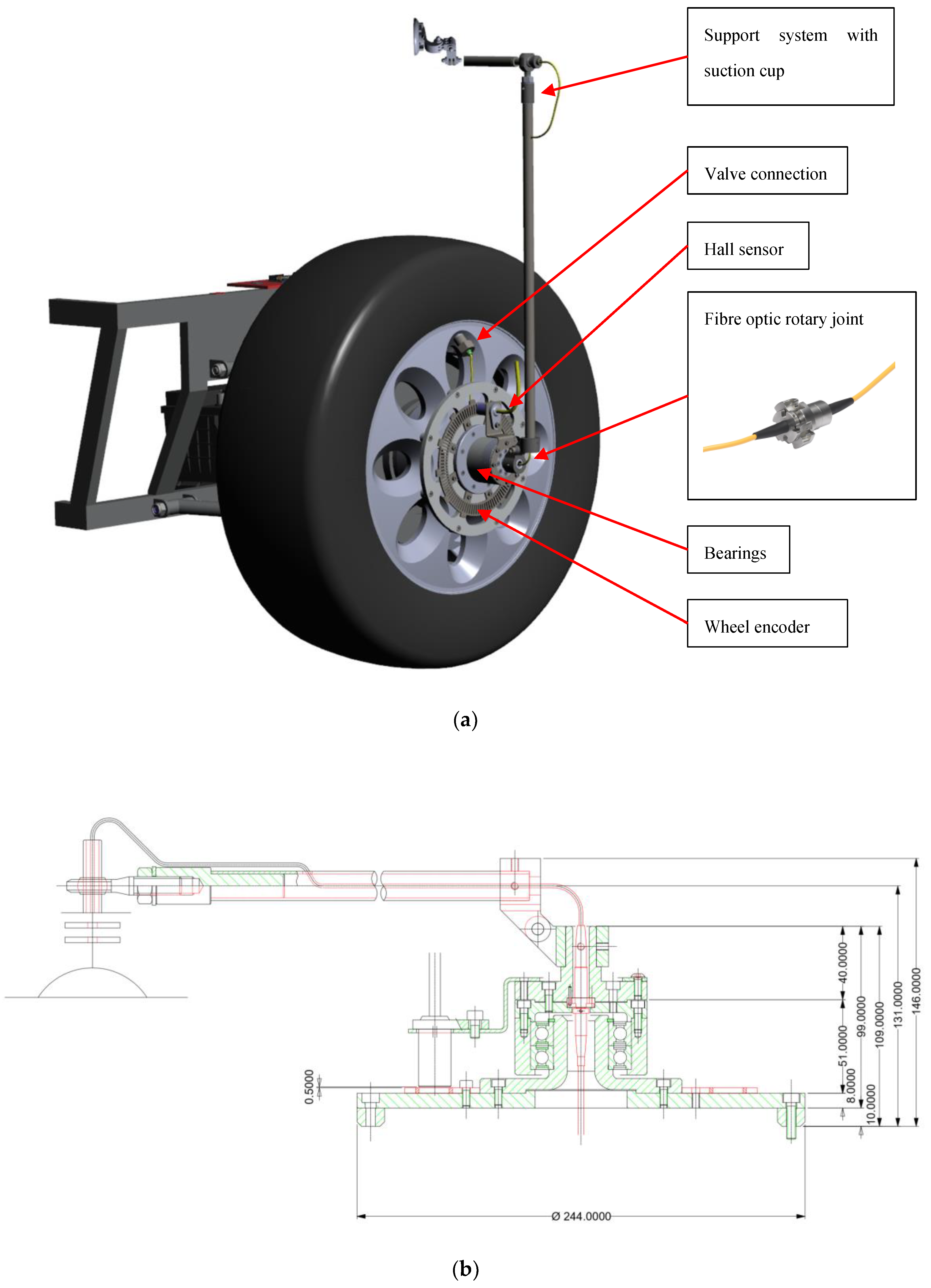
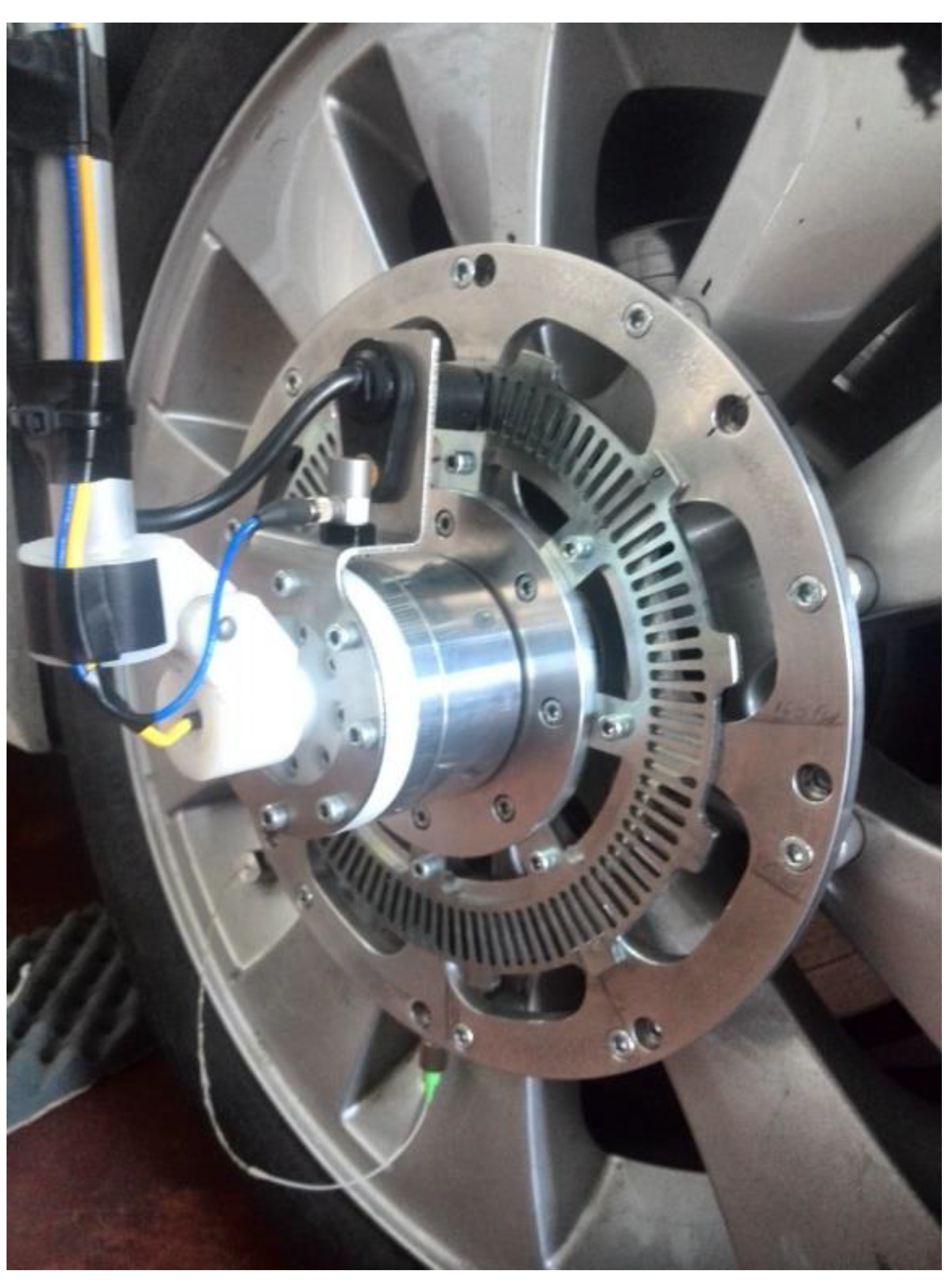
2. The Layout of the OPTYRE System
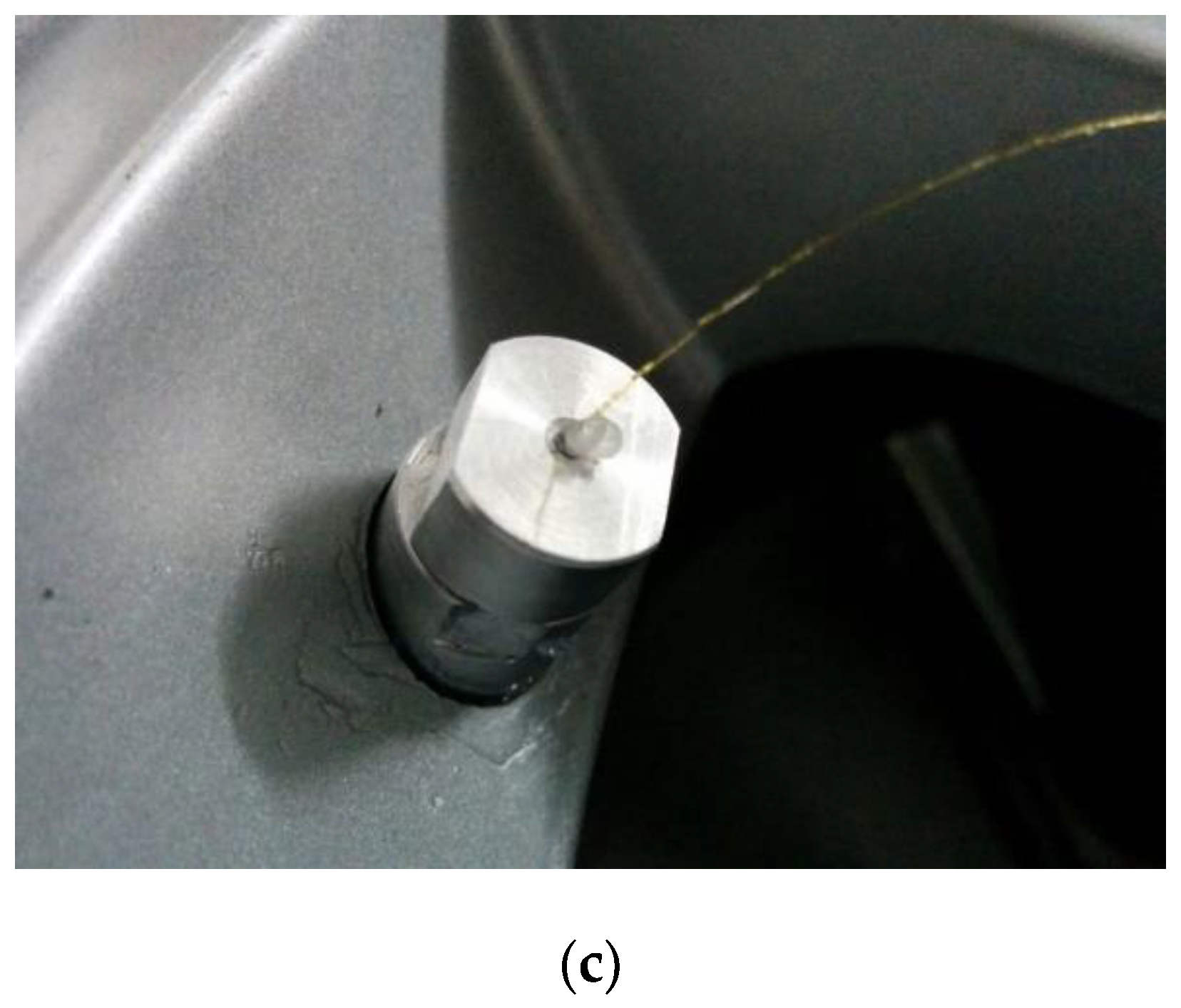
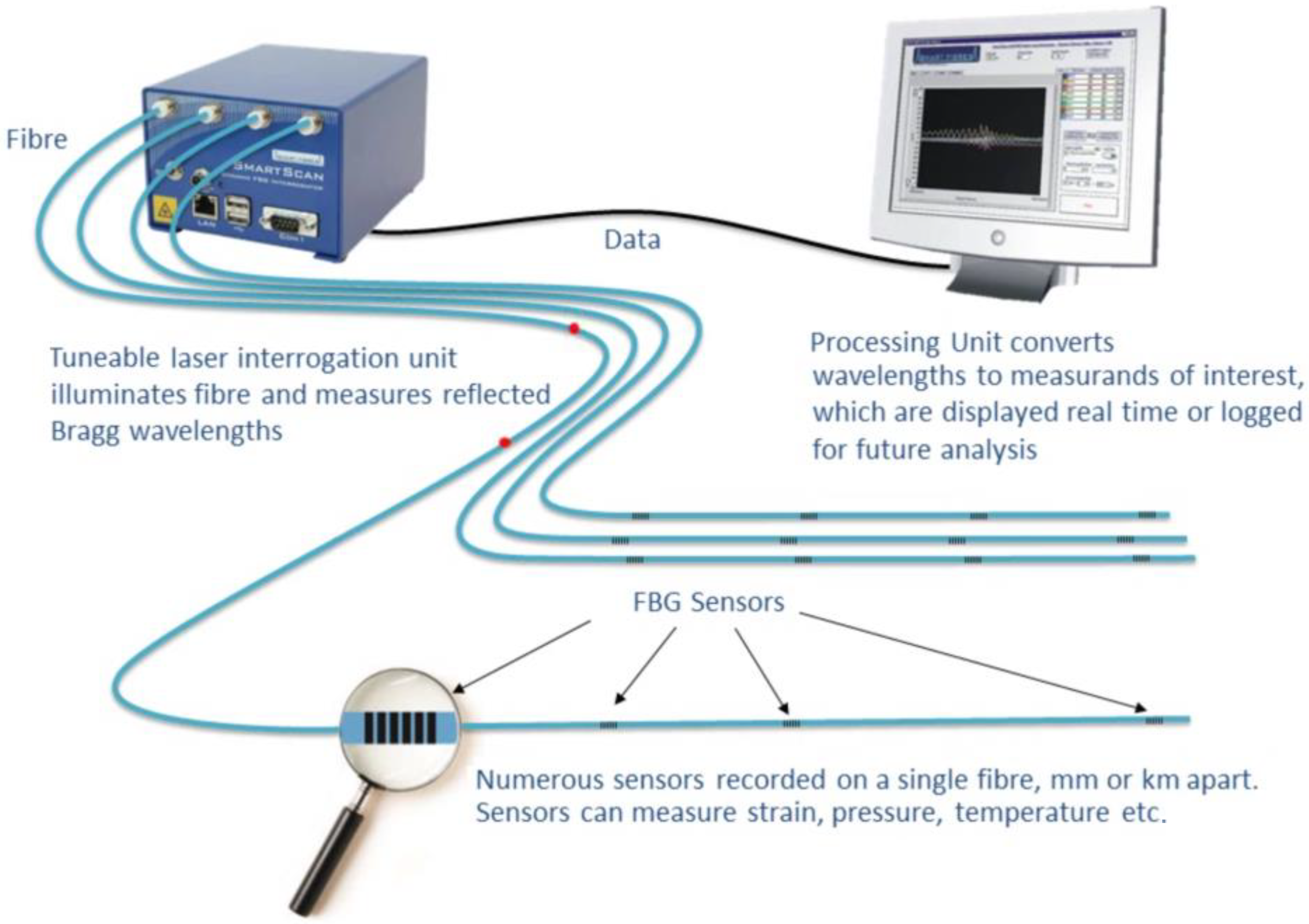
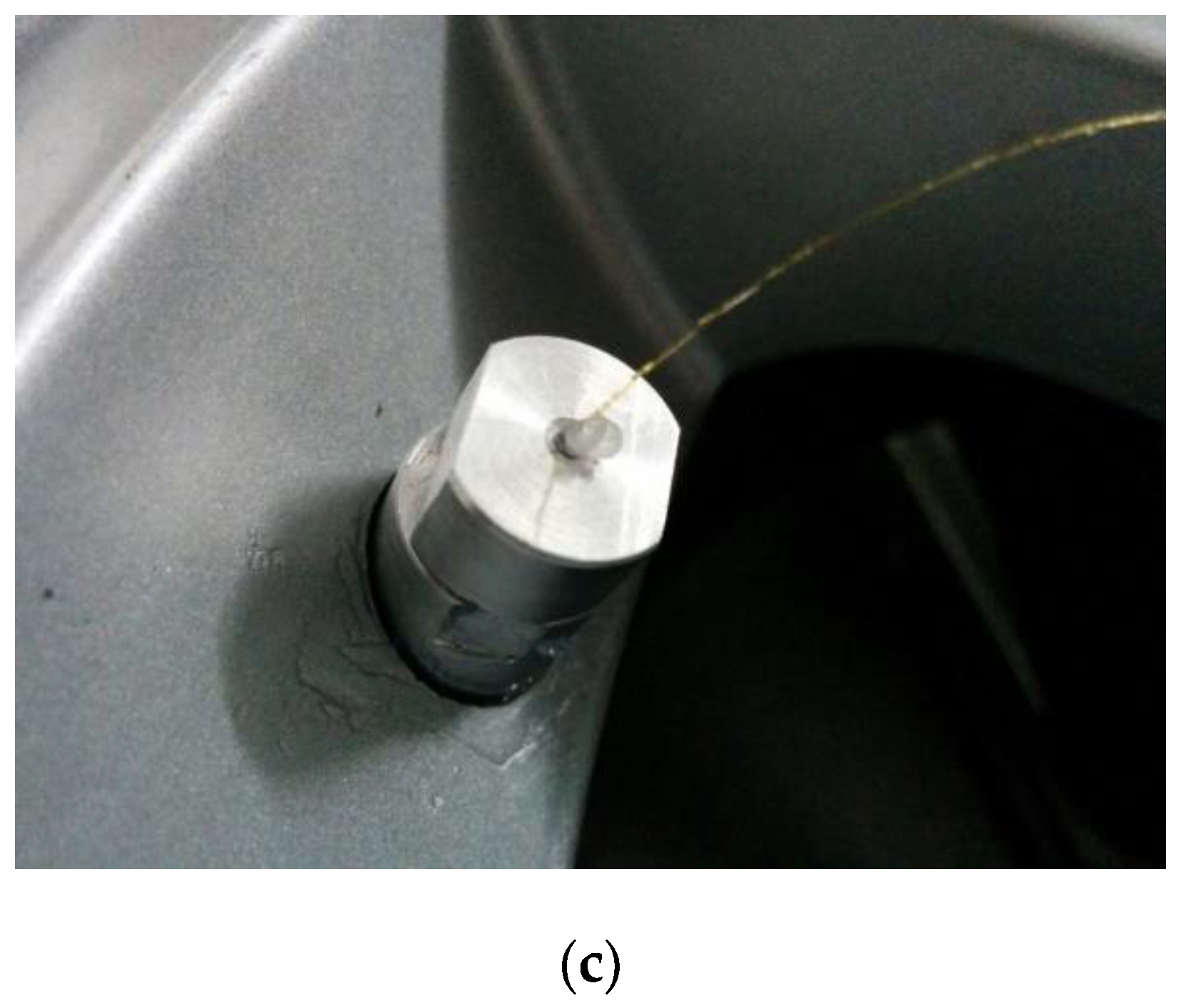
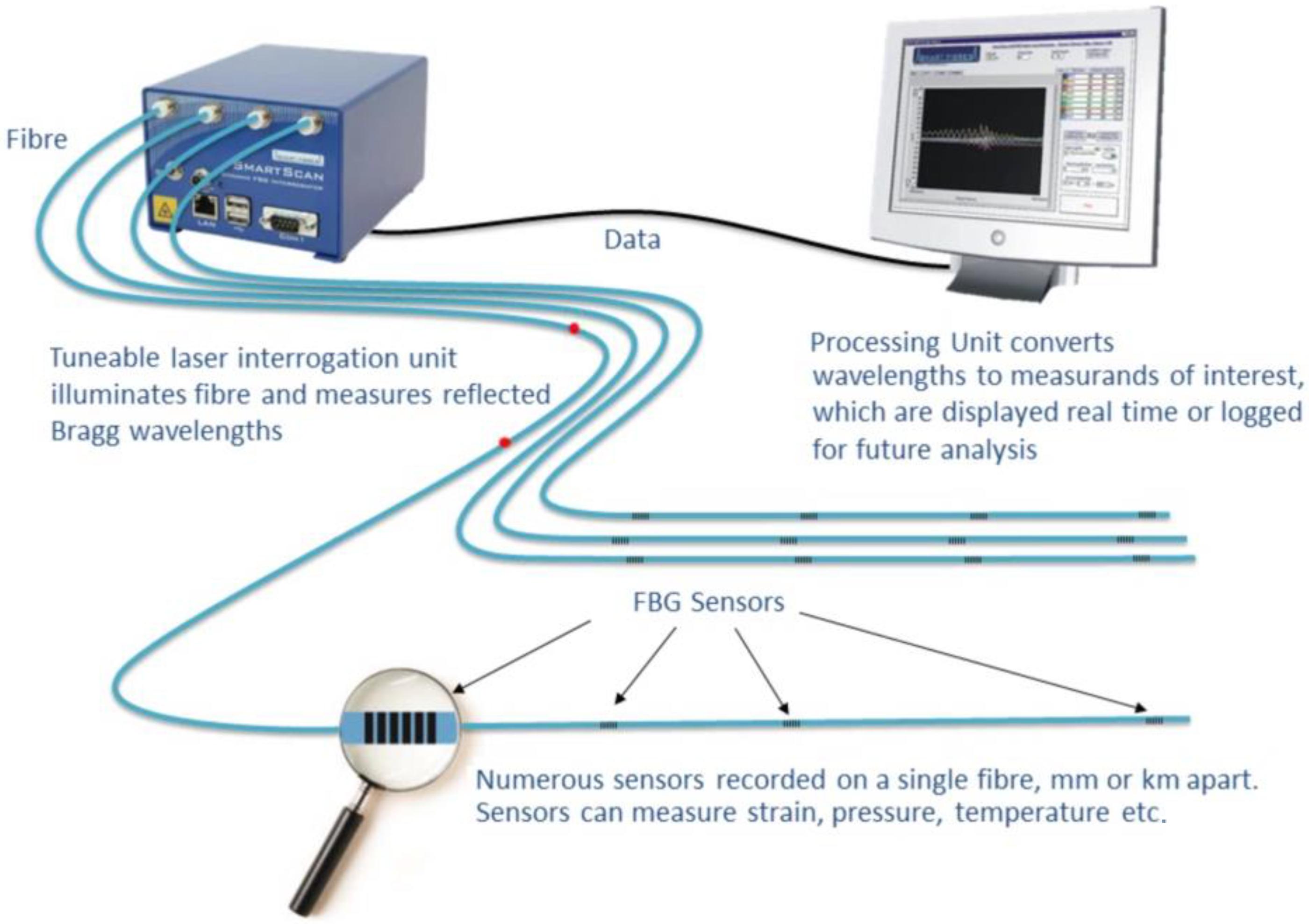
- An optical led source produced the light beam, whose wavelength belonged to the far-infrared range; the path of the light beam was the optical fibre that, equipped with several FBG sensors, was attached to the circumference of the tyre.
- A spectrum analyser acquired the variations of the reflected light frequency bandwidth, caused by deformations of the tyre.
- The computer received and processed the signal sent by the spectrum analyser, which has the function to suitably sample the incoming analogue data.
3. Rolling Resistance Model of a Rolling Tyre
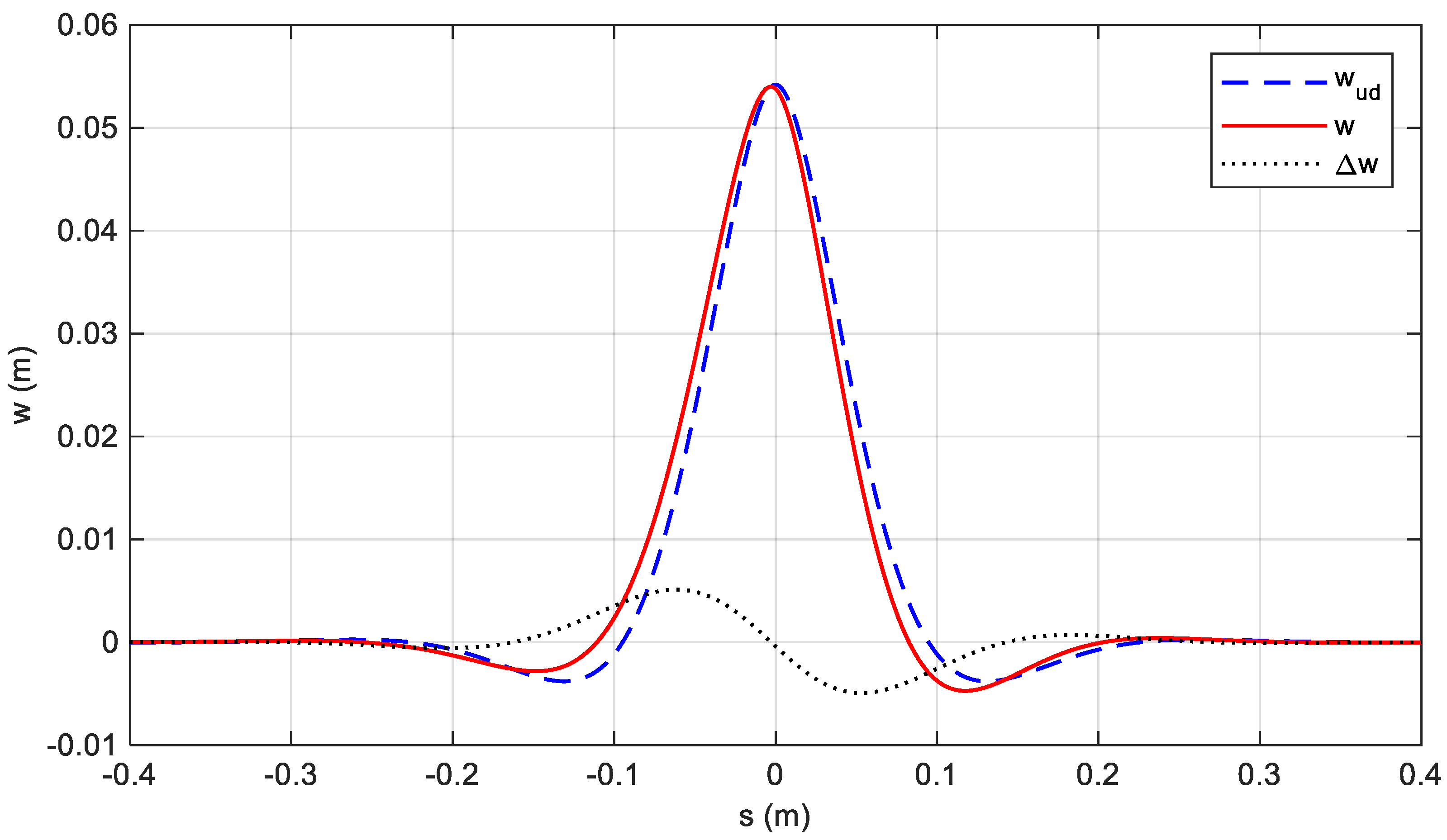
3.1. Analytical Model for the Strain Distribution over the Tyre Surface
3.2. Analytical Model for the Rolling Resistance
- The beam is modelled according to the Euler–Bernoulli theory, for which , the shear deformation and strain terms in Equations (21,22) are null and .
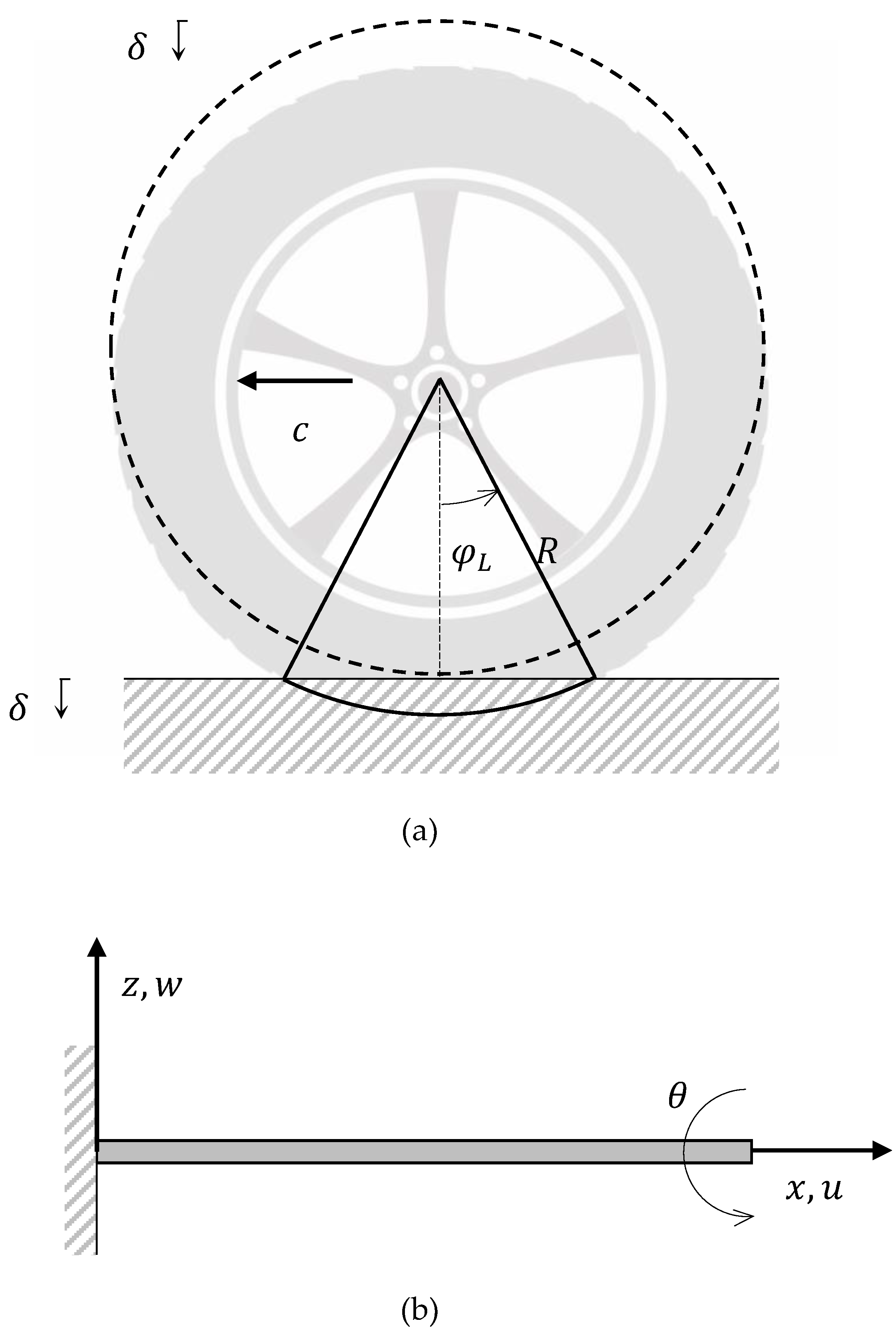
- Transforming the coordinate system, i.e., the variable x is replaced with the curvilinear abscissa Rφ, and for a stationary motion, the new independent variable s becomes . The origin of the coordinate system has a motion integral with the tyre with angular speed ω. According to the convention in Figure 5a, the contribution of the angular speed has a positive sign, implying that when the rotation is positive, the velocity vector of the centre of the tyre has a direction opposite to the x-axis.
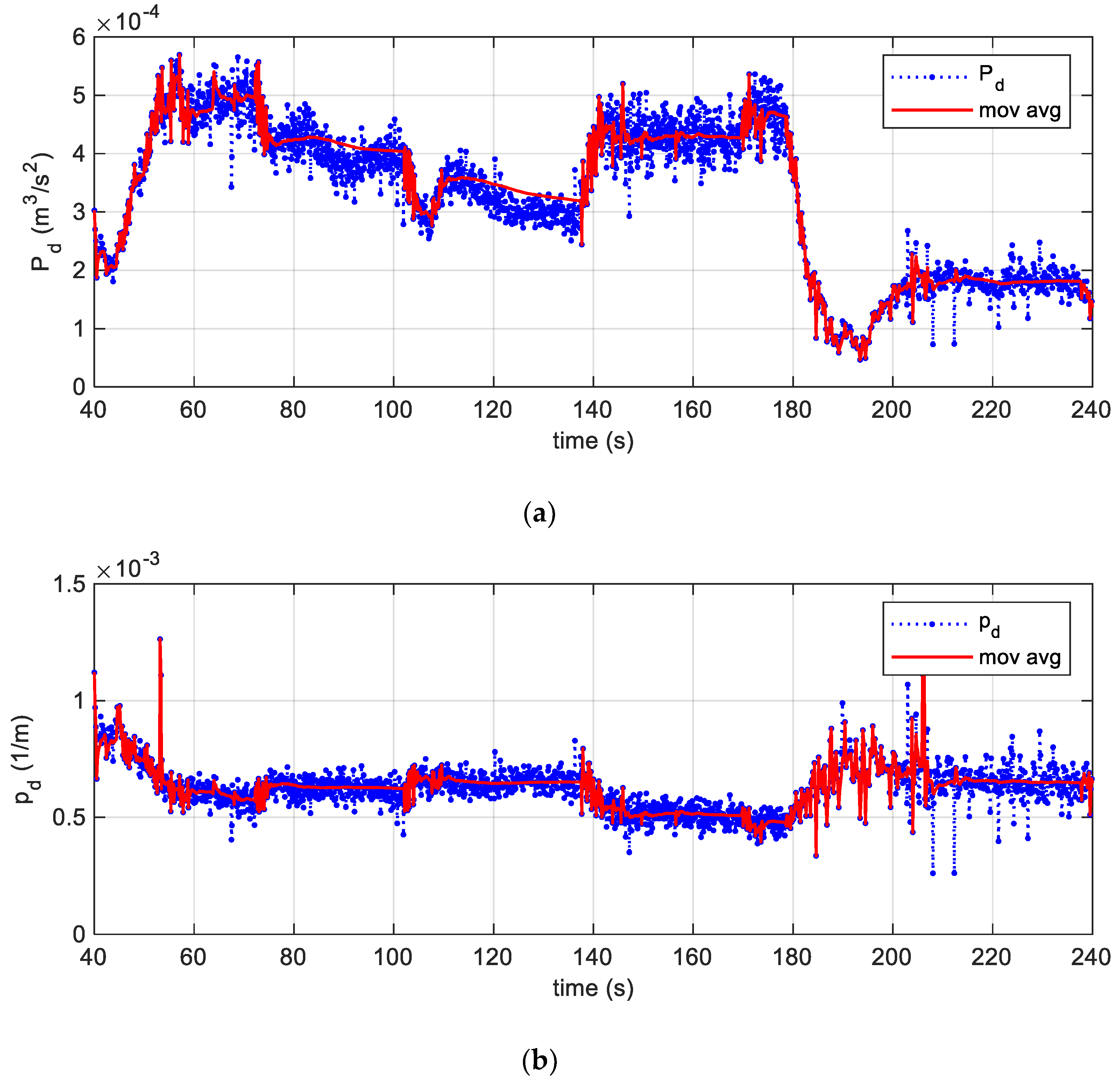
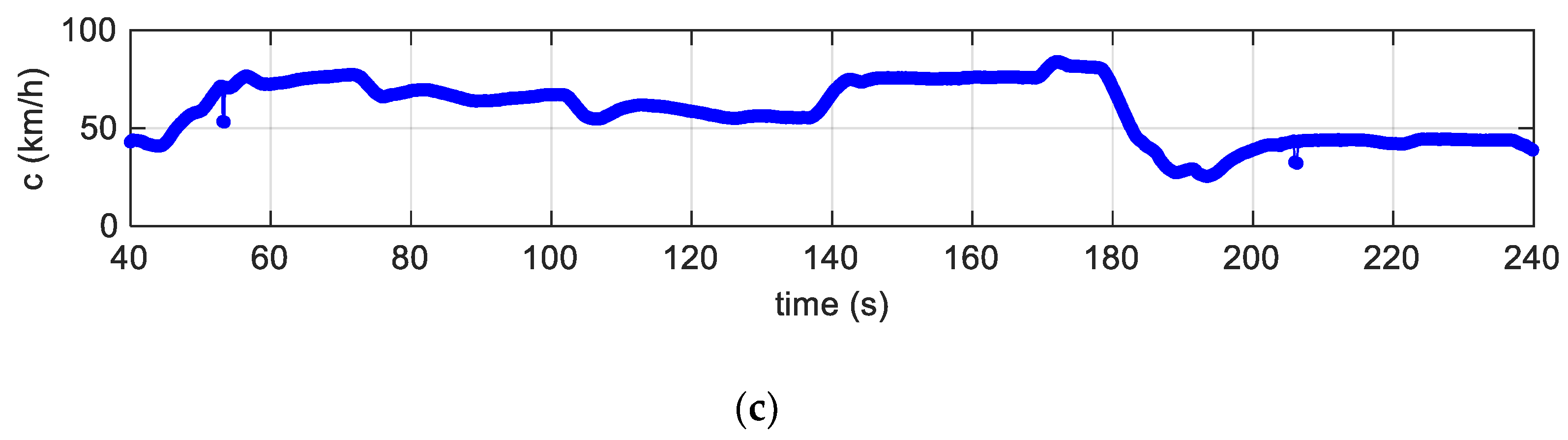
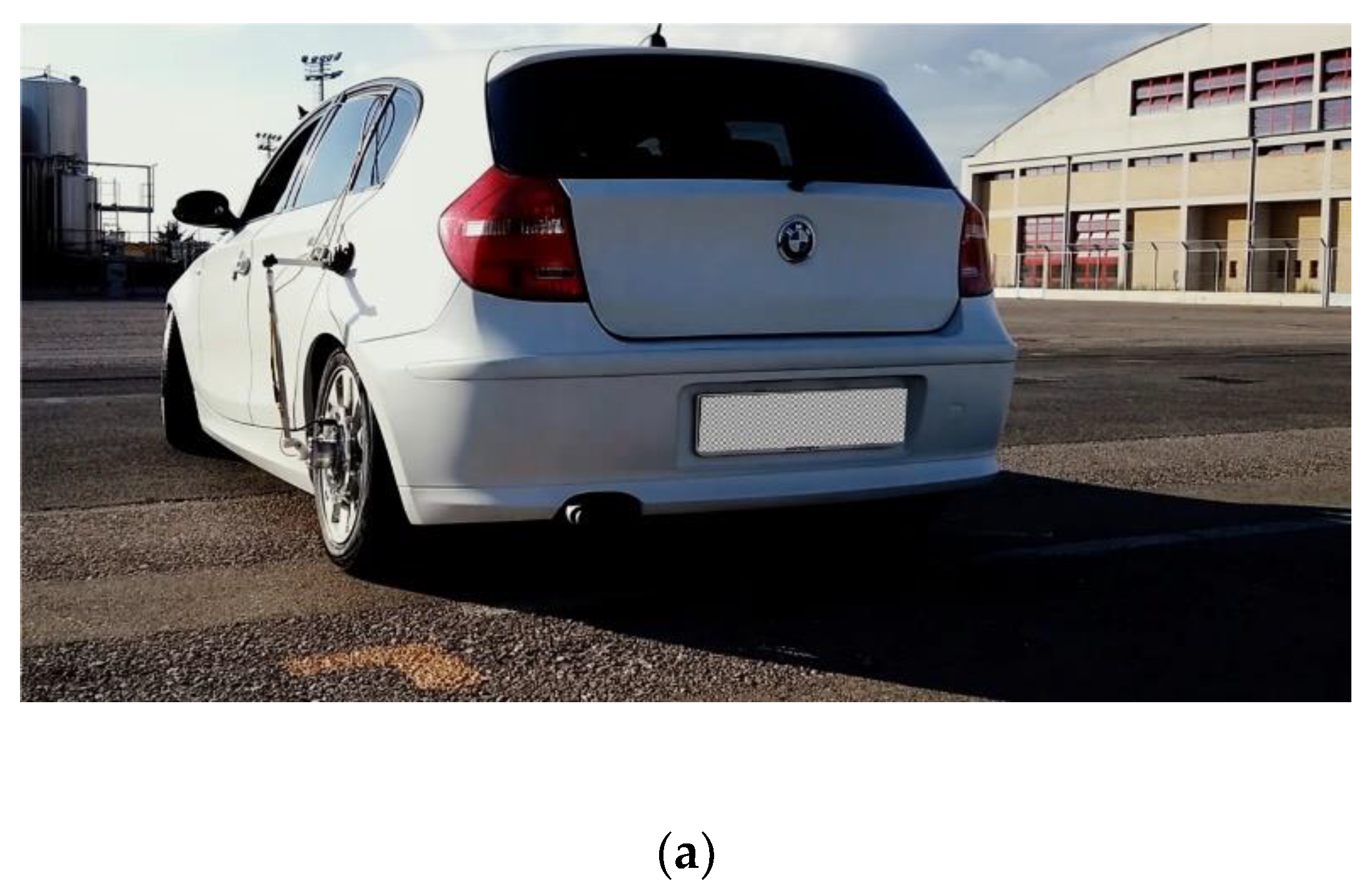
4. Field Experiments and Discussion
5. Conclusions Remarks
Author Contributions
Funding
Conflicts of Interest
References
- U.S. Environmental Protection Agency (EPA). Climate Change Indicators in the United States, 3rd ed.; EPA: Washington, DC, USA, 2014.
- Michelin. The Tire: Rolling Resistance and Fuel Savings. 2003. Available online: http://www.dimnp.unipi.it/guiggiani-m/Michelin_Tire_Rolling_Resistance.pdf. (accessed on 21 October 2019).
- Kim, S.J.; Kim, K.-S.; Yoon, Y.-S. Development of a tire model based on an analysis of tire strain obtained by an intelligent tire system. Int. J. Automot. Technol. 2015, 16, 865–875. [Google Scholar] [CrossRef]
- dell’Isola, F.; Seppecher, P. The relationship between edge contact forces, double forces and interstitial working allowed by the principle of virtual power. In Comptes Rendus de l’Academie de Sciences—Series IIb: Mecanique, Physique, Chimie, Astronomie; Elsevier: Amsterdam, The Netherlands, 1995. [Google Scholar]
- dell’Isola, F.; Madeo, A.; Seppecher, P. Boundary conditions at fluid-permeable interfaces in porous media: A variational approach. Int. J. Solids Struct. 2009, 46, 3150–3164. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; Wiley: New York, NY, USA, 2007. [Google Scholar]
- Pepe, G.; Roveri, N.; Carcaterra, A. Experimenting sensors network for innovative optimal control of car suspensions. Sensors 2019, 19, 3062. [Google Scholar] [CrossRef] [PubMed]
- Roveri, N.; Pepe, G.; Carcaterra, A. OPTYRE—A new technology for tire monitoring: Evidence of contact patch phenomena. Mech. Syst. Signal Process. 2016, 66–67, 793–810. [Google Scholar] [CrossRef]
- Ergen, S.C.; Sangiovanni-Vincentelli, A.; Sun, X.; Tebano, R.; Alalusi, S.; Audisio, G.; Sabatini, M. The tire as an intelligent sensor, computer-aided design of integrated circuits and systems. IEEE Trans. 2009, 28, 941–955. [Google Scholar]
- Jousimaa, O.J.; Xiong, Y.; Niskanen, A.J.; Tuononen, A.J. Energy harvesting system for intelligent tyre sensors. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar]
- Lee, C.; Hedrick, K.; Yi, K. Real-time slip-based estimation of maximum tire-road friction coefficient. IEEE ASME Trans. Mechatron. 2004, 9, 454–458. [Google Scholar] [CrossRef]
- Yi, J.; Alvarez, L.; Horowitz, R. Adaptive emergency braking control with underestimation of friction coefficient. IEEE Trans. Control Syst. Technol. 2002, 10, 381–392. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A.; Akay, A. Frequency intermittency and energy pumping by linear attachments. J. Sound Vib. 2014, 333, 4281–4294. [Google Scholar] [CrossRef]
- Misra, A.; Huang, S. Micromechanics based stress-displacement relationships of rough contacts: Numerical implementation under combined normal and shear loading. Comput. Model. Eng. Sci. 2009, 52, 197–215. [Google Scholar]
- Carcaterra, A.; Roveri, N.; Pepe, G. Fractional dissipation generated by hidden wave-fields. Math. Mech. Solids 2015, 20, 1251–1262. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Z.; Li, W.; He, D.; Wang, F. A fuzzy logic controller for an intelligent tires system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 875–881. [Google Scholar]
- Gustafsson, F.; Persson, N.; Drevö, M.; Forssell, U.; Quicklund, H.; Löfgren, M. Virtual Sensors of Tire Pressure and Road Friction; SAE Tech. Papers 2001-01-0796; Linköping University Electronic Press: Linköping, Sweden, 2001. [Google Scholar]
- Nabipoor, M.; Majlis, B.Y. A new passive telemetry LC pressure and temperature sensor optimized for TPMS. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2006; Volume 34, p. 770. [Google Scholar]
- Pohl, A.; Steindl, R.; Reindl, L. The “intelligent tire” utilizing passive SAW sensors measurement of tire friction. IEEE Trans. Instrum. Meas. 1999, 48, 1041–1046. [Google Scholar] [CrossRef]
- Genta, G. The Automotive Chassis; Springer: Berlin, Germany, 2009. [Google Scholar]
- Carcaterra, A.; Roveri, N. Tire grip identification based on strain information: Theory and simulations. Mech. Syst. Signal Process. 2013, 41, 564–580. [Google Scholar] [CrossRef]
- Carcaterra, A.; Roveri, N.; Platini, M. Device and Method for Optically Measuring the Grip of a Tire and Tire Suitable for Said Measuring Property. Patent RM 2011A000401, 27 July 2011. [Google Scholar]
- Audisio, G. The birth of the cyber tyre, solid-state circuits magazine. IEEE Trans. 2010, 2, 16–21. [Google Scholar]
- Andreaus, U.; Placidi, L.; Rega, G. Soft impact dynamics of a cantilever beam: Equivalent SDOF model versus infinite-dimensional system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 2444–2456. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A. Unsupervised identification of damage and load characteristics in time-varying systems. Contin. Mech. Thermodyn. 2015, 27, 531–550. [Google Scholar] [CrossRef]
- Carlson, C.R.; Gerdes, J.C. Consistent nonlinear estimation of longitudinal tire stiffness and effective radius. IEEE Trans. Control Syst. Technol. 2005, 13, 1010–1020. [Google Scholar] [CrossRef]
- Antonelli, D.; Nesi, L.; Pepe, G.; Carcaterra, A. A novel control strategy for autonomous cars. In Proceedings of the American Control Conference (ACC 2019), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Antonelli, D.; Nesi, L.; Pepe, G.; Carcaterra, A. A novel approach in Optimal trajectory identification for Autonomous driving in racetrack. In Proceedings of the 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3267–3272. [Google Scholar] [CrossRef]
- Antonelli, D.; Nesi, L.; Pepe, G.; Carcaterra, A. Mechatronic control of the car response based on VFC. In Proceedings of the 28th International Conference on Noise and Vibration Engineering (ISMA 2018), Leuven, Belgium, 17–19 September 2018. [Google Scholar]
- Pepe, G.; Roveri, N.; Carcaterra, A. Prototyping a new car semi-active suspension by variational feedback controller. In Proceedings of the 27th International Conference on Noise and Vibration Engineering (ISMA 2016), Leuven, Belgium, 19–21 September 2016. [Google Scholar]
- Pensalfini, S.; Coppo, F.; Mezzani, F.; Pepe, G.; Carcaterra, A. Optimal control theory based design of elasto-magnetic metamaterial. Procedia Eng. 2017, 199, 1761–1766. [Google Scholar] [CrossRef]
- Antunes, P.; Dominguez, F.; Granada, M.; André, P. Mechanical Properties of Optical Fibers, Selected Topics on Optical Fiber Technology; Yasin, M., Ed.; InTech: Vienna, Austria, 2012. [Google Scholar]
- Roveri, N.; Carcaterra, A.; Sestieri, A. Real-time monitoring of railway infrastructures using fibre Bragg grating sensors. Mech. Syst. Signal Process. 2015, 60–61, 14–28. [Google Scholar] [CrossRef]
- Sestieri, A. New monitoring technologies in mechanical systems. In Proceedings of the 7th International Conference on Acoustical and Vibratory Surveillance Methods and Diagnostic Techniques (Surveillance 7), Chartres, France, 29–30 October 2013. [Google Scholar]
- Coppo, F.; Pepe, G.; Roveri, N.; Carcaterra, A. A multisensing setup for the intelligent tire monitoring. Sensors 2017, 17, 576. [Google Scholar] [CrossRef] [PubMed]
- Montella, G. Mechanical Characterization of a Tire Derived Material and Its Application in Vibration Reduction. Ph.D. Thesis, University of Naples “Federico II”, Naples, Italy, 2014. [Google Scholar]
- Noor, A.K.; Tanner, J.A. Tanner, Computational Modeling of Tires; NASA-CP-3306; NASA Langley Research Center: Hampton, VA, USA, 1995.
- Carcaterra, A.; Roveri, N. A new theory of shock response in structural dynamics. In Proceedings of the International Conference on Structural Engineering Dynamics, Tavira, Portugal, 20–22 June 2011; ISBN 978-989-96276-0-4. [Google Scholar]
- Jazar, R.N. Vehicle Dynamics: Theory and Applications; Springer: Berlin, Germany, 2008; ISBN 10 0387742433. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Definition | Notations | Definition |
|---|---|---|---|
| Longitudinal space coordinate of the beam (m) | Constants of the bending beam solution | ||
| Transversal distance of the beam from the neutral axis (m) | Perturbation coefficient associated with the nondimensional vertical displacement of the damped beam | ||
| Vertical distance of the beam (m) | Strain deformation | ||
| Time coordinate (s) | External power i.e., the work done on the deformed solid for unit time (Nm/s) | ||
| Longitudinal displacement of the beam (m) | Kinetic power (Nm/s) | ||
| Vertical displacement of the beam (m) | Stress power (Nm/s) | ||
| Rotation of the cross-section of the beam around y axis (rad) | Volume of the deformed solid (m3) | ||
| Static beam deflection (m) | Area of the deformed solid (m2) | ||
| Elastic modulus (Pa) | Density of the deformed solid (kg/m3) | ||
| Shear modulus (Pa) | Body force per unit mass distributed over the volume V (N/kg) | ||
| Second moment of area of the beam’s cross-section (m4) | Velocity vector of the particle (m/s) | ||
| Mass per unitary length of the beam (kg/m) | Contact force per unit area or stress vector (N/m2) | ||
| Damping coefficient of the beam (1/s) | Cauchy stress tensor (Pa) | ||
| Winkler elastic foundation (N/m2) | Strain tensor | ||
| Vertical load (N/m) | Normal versor | ||
| Speed of load movement P or tyre speed (m/s) | Viscoelastic damping coefficient (Pa s) | ||
| Critical speed of c (m/s) | Angular tyre position (rad) | ||
| Dirac’s function | Angular tyre speed (rad/s) | ||
| Nondimensional vertical displacement of the beam | Tyre radius (m) | ||
| Nondimensional vertical displacement of the undamped beam | Tyre thickness (m) | ||
| Nondimensional vertical displacement of the damped beam | Longitudinal strain evaluated on the tyre contact surface | ||
| Nondimensional space coordinate | Dissipation factor (1/m) | ||
| Nondimensional stiffness of the beam | Power dissipated or specific power (m3/s2) | ||
| Nondimensional damping coefficient of the beam |
| Constant Values | |
|---|---|
| E = 5∙107 N | Tyre Young modulus |
| J = 1.66∙10−8 m4 | Beam area moment of inertia |
| µ = 1100 kg/m | Tyre mass per unit length |
| k = 7.790∙106 N/m2 | Elastic constant of the Winkler foundation |
| R = 0.3126 m | The unloaded radius of the tyre |
| ht = 0.018 m | Tyre section height |
| L = 0.05 m | Semi footprint length |
| M = 400∙9.81 N | Total load over the footprint |
| Cx = 1.883∙106 N/m | Longitudinal slip coefficient |
| fs = 0.8 | Static tyre-road friction coefficient |
| fd = 0.6 | Kinematic tyre-road friction coefficient |
| c = 11.11 m/s | Speed of the moving load |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roveri, N.; Pepe, G.; Mezzani, F.; Carcaterra, A.; Culla, A.; Milana, S. OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres. Sensors 2019, 19, 5119. https://doi.org/10.3390/s19235119
Roveri N, Pepe G, Mezzani F, Carcaterra A, Culla A, Milana S. OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres. Sensors. 2019; 19(23):5119. https://doi.org/10.3390/s19235119
Chicago/Turabian StyleRoveri, Nicola, Gianluca Pepe, Federica Mezzani, Antonio Carcaterra, Antonio Culla, and Silvia Milana. 2019. "OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres" Sensors 19, no. 23: 5119. https://doi.org/10.3390/s19235119
APA StyleRoveri, N., Pepe, G., Mezzani, F., Carcaterra, A., Culla, A., & Milana, S. (2019). OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres. Sensors, 19(23), 5119. https://doi.org/10.3390/s19235119