Snow Depth Estimation on Slopes Using GPS-Interferometric Reflectometry



Abstract
1. Introduction
2. GPS Observations and Snow Depth Measurements
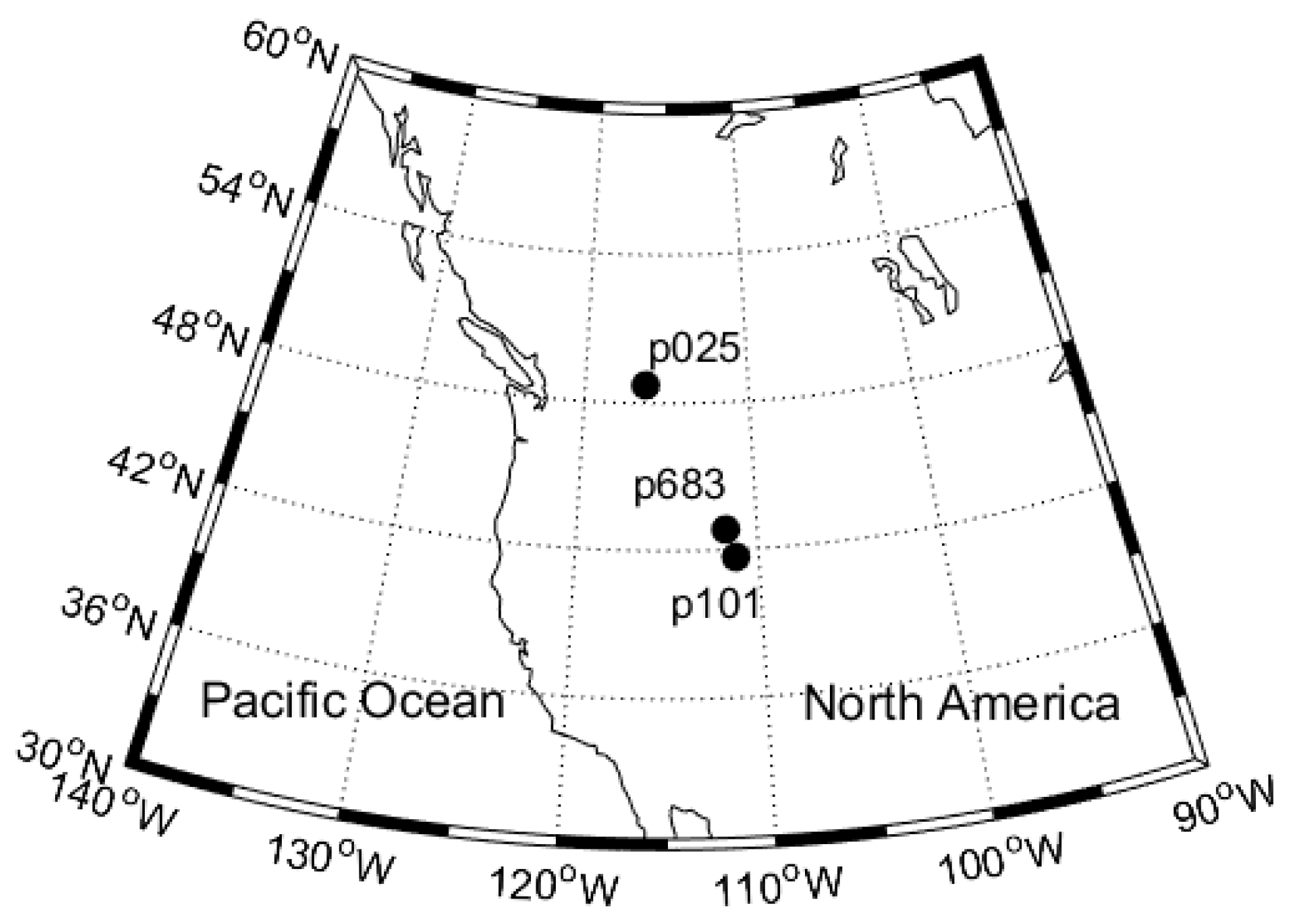
2.1. GPS Observations
2.2. SNOTEL Measurements
2.3. SNODAS Gridded Products
3. Methodology
3.1. GPS-IR Snow Depth Estimation in Flat Areas
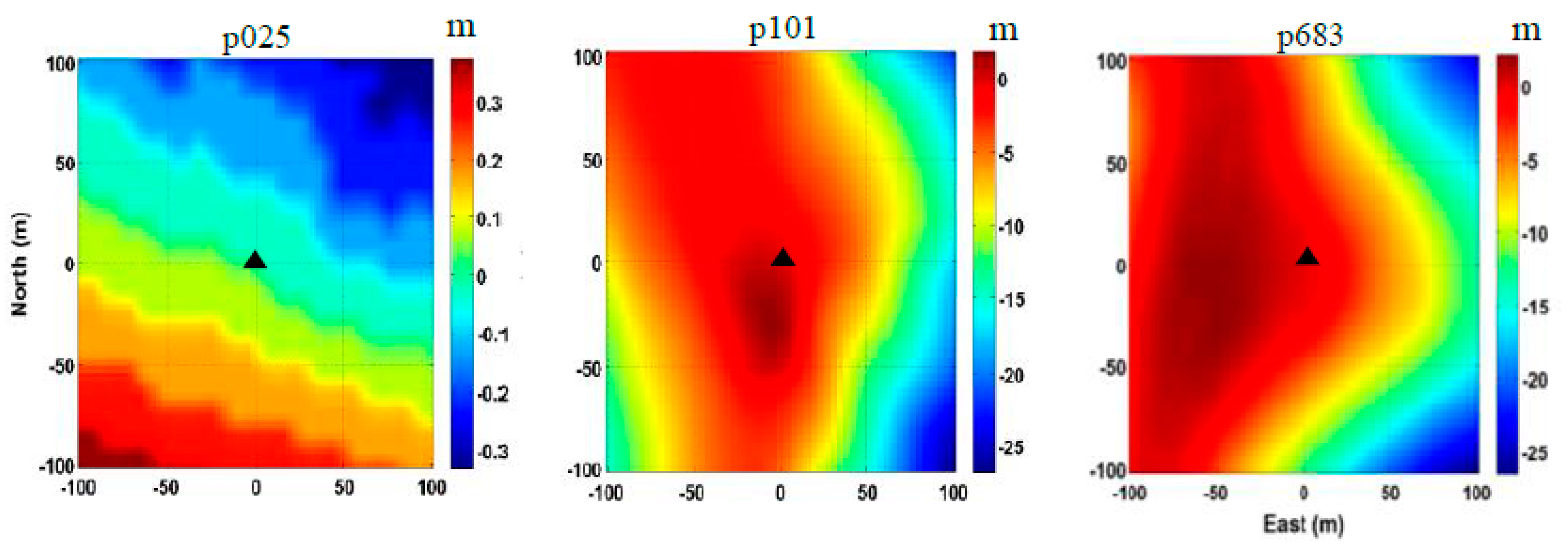
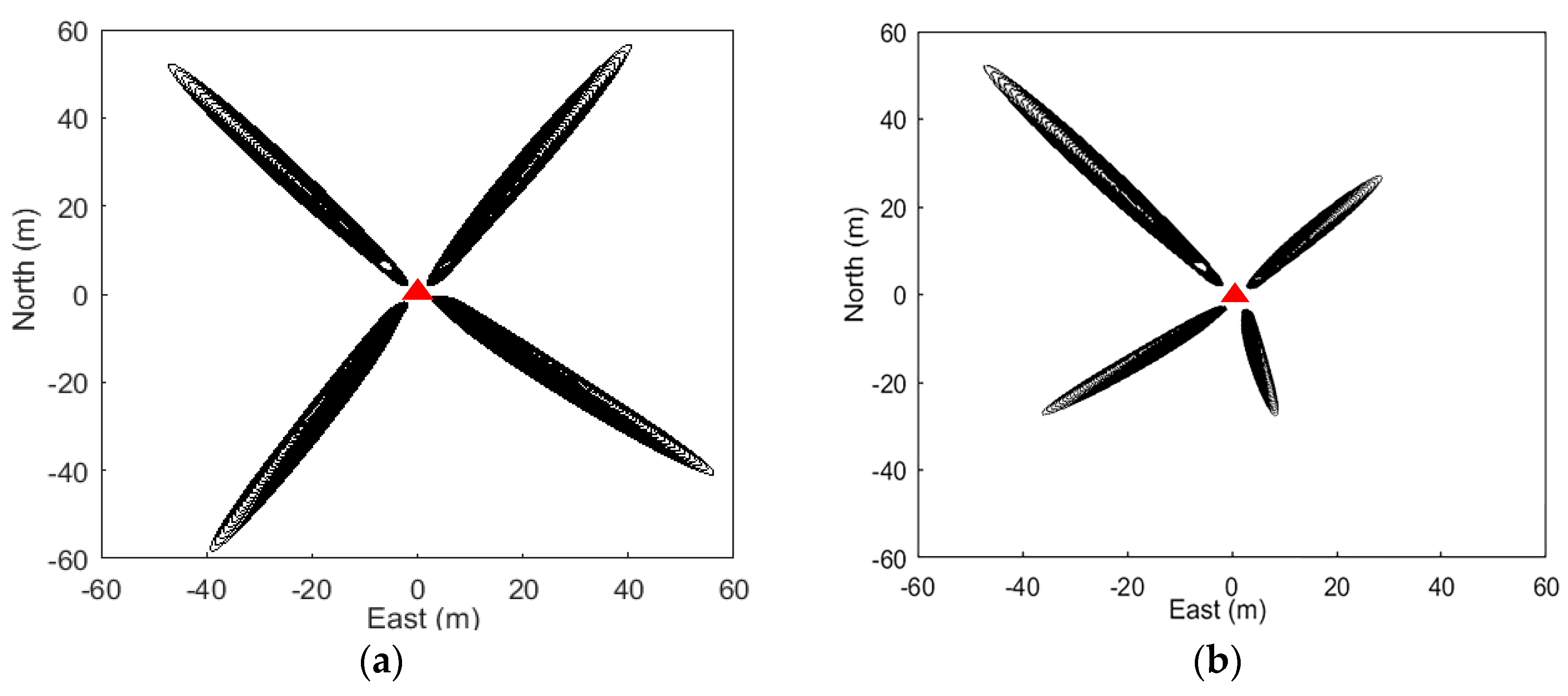
3.2. GPS-IR Snow Depth Estimation on Slopes
- (1)
- Reflected point tracks located on a flat area as well as with strong ground reflection should be chosen using the LSP method;
- (2)
- Tracks with the elevation angles from 5° to 20° are chosen. LSP curves with dominant peaks smaller than three times their background noise are removed;
- (3)
- Reflected height of each selected track can be calculated from Equation (3). Mean daily reflected height as well as standard deviation can be determined from all available reflected heights;
- (4)
- Snow-free reflected heights are estimated using summertime data, and snow-covered reflected heights are estimated using snow-time data. Therefore, the daily mean snow depths are calculated by the difference between snow-free and snow-covered reflected heights.
4. Results and Analysis
4.1. Snow Depth Time Series
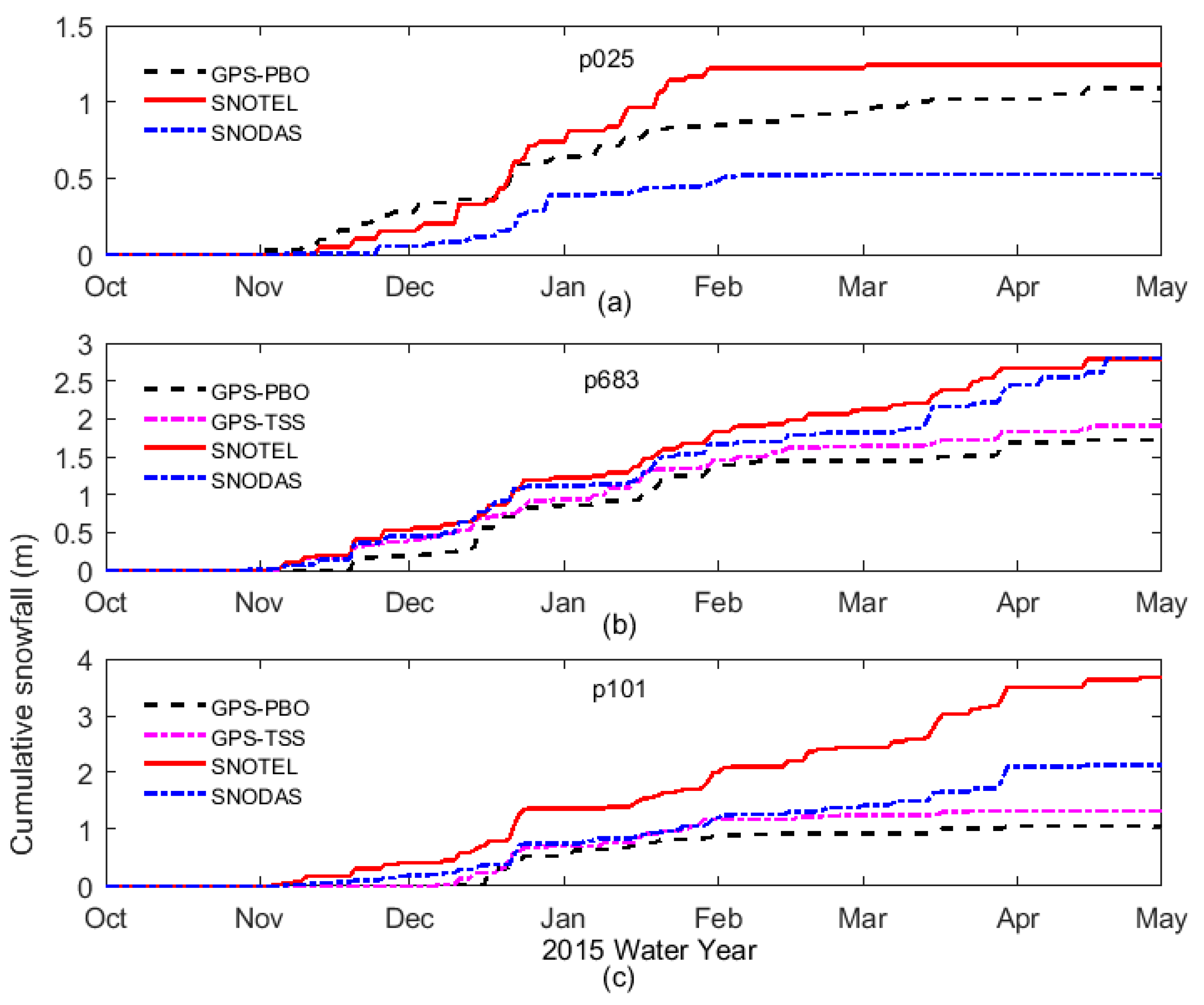
4.2. Cumulative Snowfall
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rott, H.; Yueh, S.H.; Cline, D.W.; Duguay, C.; Essery, R.; Haas, C.; Hélière, F.; Kern, M.; Macelloni, G.; Malnes, E.; et al. Cold Regions Hydrology High-Resolution Observatory for Snow and Cold Land Processes. IEEE Proc. 2010, 98, 752–765. [Google Scholar] [CrossRef]
- Barnett, T.P.; Adam, J.C.; Lettenmaier, D.P. Potential impacts of a warming climate on water availability in snow-dominated regions. Nature 2005, 438, 303–309. [Google Scholar] [CrossRef] [PubMed]
- Garvelmann, J.; Pohl, S.; Weiler, M. From observation to the quantification of snow processes with a time-lapse camera network. Hydrol. Earth Syst. Sci. 2013, 17, 1415–1429. [Google Scholar] [CrossRef]
- Painter, T.H.; Rittger, K.; Mckenzie, C.; Slaughter, P.; Davis, R.E.; Dozier, J. Retrieval of subpixel snow covered area, grain size, and albedo from MODIS. Remote Sens. Environ. 2009, 113, 868–879. [Google Scholar] [CrossRef]
- Rittger, K.; Painter, T.H.; Dozier, J. Assessment of methods for mapping snow cover from MODIS. Adv. Water Resour. 2013, 51, 367–380. [Google Scholar] [CrossRef]
- Gutmann, E.D.; Larson, K.M.; Williams, M.W.; Nievinski, F.G.; Zavorotny, V. Snow measurement by GPS interferometric reflectometry: An evaluation at Niwot Ridge, Colorado. Hydrol. Process. 2012, 26, 2951–2961. [Google Scholar] [CrossRef]
- Rho, H.; Langley, R.B. Dual-frequency GPS precise point positioning with WADGPS corrections. Annu. Navig. 2007, 54, 139–152. [Google Scholar] [CrossRef]
- Zheng, J.Z.; Guo, F. An adaptive stochastic model for GPS observations and its performance in precise point positioning. Surv. Rev. 2016, 48, 296–302. [Google Scholar] [CrossRef]
- Reilinger, R.; McClusky, S.; Vernant, P.; Lawrence, S.; Ergintav, S.; Cakmak, R.; Ozener, H.; Kadirov, F.; Guliev, I.; Stepanyan, R. GPS constraints on continental deformation in the Africa-Arabia-Eurasia continental collision zone and implications for the dynamics of plate interactions. J. Geophys. Res. 2006. [Google Scholar] [CrossRef]
- Najibi, N.; Jin, S. Physical Reflectivity and Polarization Characteristics for Snow and Ice-Covered Surfaces Interacting with GPS Signals. Remote Sens. 2013, 5, 4006–4030. [Google Scholar] [CrossRef]
- Jin, S.; Najibi, N. Sensing snow height and surface temperature variations in Greenland from GPS reflected signals. Adv. Space Res. 2014, 53, 1623–1633. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Axelrad, P.; Braun, J.J. Using GPS multipath to measure soil moisture luctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of Near-Surface Soil Moisture on GPS SNR Data: Development of a Retrieval Algorithm for Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2014, 52, 537–543. [Google Scholar] [CrossRef]
- Larson, K.M.; Gutmann, E.D.; Zavorotny, V.U.; Braun, J.J.; Williams, M.W.; Nievinski, F.G. Can we measure snow depth with GPS receivers? Geophys. Res. Lett. 2009, 36, L17502. [Google Scholar] [CrossRef]
- Larson, K.M.; Nievinski, F.G. GPS snow sensing: Results from the EarthScope Plate Boundary Observatory. GPS Solut. 2013, 17, 41–52. [Google Scholar] [CrossRef]
- Larson, K.M. GPS interferometric reflectometry: Applications to surface soil moisture, snow depth, and vegetation water content in the western United States. Wiley Interdiscip. Rev. Water 2016, 3, 775–787. [Google Scholar] [CrossRef]
- Nievinski, F.G.; Larson, K.M. Forward modeling of GPS multipath for near-surface eflectometry and positioning applications. GPS Solut. 2014, 18, 309–322. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M.; Axelrad, P. Observations of signal-to-noise ratios (SNR) at geodetic GPS site CASA: Implications for phase multipath. Proc. Cent. Eur. Geodyn. Seismol. 2004, 23, 77–83. [Google Scholar]
- Nievinski, F.G.; Larson, K.M. Inverse Modeling of GPS Multipath for Snow Depth Estimation—Part I: Formulation and Simulations. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6555–6563. [Google Scholar] [CrossRef]
- Nievinski, F.G.; Larson, K.M. Inverse Modeling of GPS Multipath for Snow Depth Estimation—Part II: Application and Validation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6564–6573. [Google Scholar] [CrossRef]
- Yu, K.; Ban, W.; Zhang, X.; Yu, X. Snow Depth Estimation Based on Multipath Phase Combination of GPS Triple-Frequency Signals. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5100–5109. [Google Scholar] [CrossRef]
- Mccreight, J.L.; Small, E.E.; Larson, K.M. Snow depth, density, and SWE estimates derived from GPS reflection data: Validation in the western U. S. Water Resour. Res. 2014, 50, 6892–6909. [Google Scholar] [CrossRef]
- Tabibi, S.; Nievinski, F.G.; van Dam, T.; Monico, J.F.G. Assessment of modernized GPS L5 SNR for ground-based multipath reflectometry applications. Adv. Space Res. 2015, 55, 1104–1116. [Google Scholar] [CrossRef]
- Jin, S.; Qian, X.; Kutoglu, H. Snow Depth Variations Estimated from GPS-Reflectometry: A Case Study in Alaska from L2P SNR Data. Remote Sens. 2016, 8, 63. [Google Scholar] [CrossRef]
- Boniface, K.; Braun, J.J.; Mccreight, J.L.; Nievinski, F.G. Comparison of Snow Data Assimilation System with GPS reflectometry snow depth in the Western United States. Hydrol. Process. 2015, 29, 2425–2437. [Google Scholar] [CrossRef]
- The Plate Boundary Observatory Network, Colorado, USA. Available online: http://pbo.unavco.org (accessed on 30 October 2017).
- Serreze, M.C.; Clark, M.P.; Frei, A. Characteristics of large snowfall events in the montane western United States as examined using snowpack telemetry (SNOTEL) data. Water Resour. Res. 2001, 37, 675–688. [Google Scholar] [CrossRef]
- National Water and Climate Center, Oregon, USA. Available online: https://www.wcc.nrcs.usda.gov/ (accessed on 30 October 2017).
- Snow Data Assimilation System of National Snow and Ice Data Center, Colorado, USA. Available online: https://nsidc.org/data/g02158 (accessed on 1 July 2019).
- Carroll, T.; Cline, D.; Fall, G.; Nilsson, A.; Li, L.; Rost, A. NOHRSC Operations and the Simulation of Snow Cover Properties for the Conterminous U.S. In Proceedings of the 69th Annual Meeting of the Western Snow Conference, Sun Valley, ID, USA, 16–19 April 2001; pp. 1–14. [Google Scholar]
- Barrett, A.P. National Operational Hydrologic Remote Sensing Center Snow Data Assimilation System (SNODAS) Products at NSIDC; National Snow and Ice Data Center, Cooperative Institute for Research in Environmental Sciences, University of Colorado, Boulder: Boulder, CO, USA, 2003. [Google Scholar]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS multipath and its relation to near-surface soil moisture content. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Press, F.; Teukolsky, S.; Vetterling, W.; Flannery, B. Numerical Recipes in Fortran 90: The Art of Parallel Scientific Computing, 2nd ed.; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Axelrad, P.; Larson, K.; Jones, B. Use of the Correct Satellite Repeat Period to Characterize and Reduce Site-Specific Multipath Errors. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005; pp. 2638–2648. [Google Scholar]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing Calibrated GPS Reflected Signals to Estimate Soil Reflectivity and Dielectric Constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PBO Site | Latitude Degrees | Longitude Degrees | Elevation (m) | Surface Condition |
|---|---|---|---|---|
| p025 | 48.731 | −116.288 | 695.9 | Flat |
| p101 | 41.6923 | −111.2360 | 2016.1 | Tilted |
| p683 | 42.8267 | −111.7345 | 2066.4 | Tilted |
| Site ID | Corresponding PBO Site | Latitude Degrees | Longitude Degrees | Elevation (m) | Elevation Difference to PBO Site(m) | Horizontal Distance to PBO Site (km) |
|---|---|---|---|---|---|---|
| 1053 | p025 | 48.723 | −116.463 | 1072 | 376.1 | 14 |
| 374 | p101 | 41.69 | −111.42 | 2434 | 417.9 | 15 |
| 770 | p683 | 42.95 | −111.36 | 2072.6 | 6.2 | 29 |
| Method | Correlation Coefficient | Standard Deviation (m) | Mean Deviation (m) |
|---|---|---|---|
| PBO vs. SNOTEL | 0.9266 | 0.0877 | −0.0420 |
| PBO vs. SNODAS | 0.9647 | 0.0138 | 0.0307 |
| Method | Correlation Coefficient | Standard Deviation (m) | Mean Deviation (m) |
|---|---|---|---|
| PBO vs. SNOTEL | 0.9250 | 0.1850 | −0.2696 |
| PBO vs. SNODAS | 0.9706 | 0.1066 | −0.0880 |
| TSS vs. SNOTEL | 0.9521 | 0.1382 | −0.1583 |
| TSS vs. SNODAS | 0.9704 | 0.0859 | 0.0233 |
| Method | Correlation Coefficient | Standard Deviation (m) | Mean Deviation (m) |
|---|---|---|---|
| PBO vs. SNOTEL | 0.7290 | 0.4014 | −0.5365 |
| PBO vs. SNODAS | 0.8927 | 0.1480 | 0.0781 |
| TSS vs. SNOTEL | 0.7274 | 0.4034 | −0.5558 |
| TSS vs. SNODAS | 0.8902 | 0.0132 | 0.0588 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, H.; He, X.; Feng, Y.; Jin, S.; Shen, F. Snow Depth Estimation on Slopes Using GPS-Interferometric Reflectometry. Sensors 2019, 19, 4994. https://doi.org/10.3390/s19224994
Wei H, He X, Feng Y, Jin S, Shen F. Snow Depth Estimation on Slopes Using GPS-Interferometric Reflectometry. Sensors. 2019; 19(22):4994. https://doi.org/10.3390/s19224994
Chicago/Turabian StyleWei, Haohan, Xiufeng He, Yanming Feng, Shuanggen Jin, and Fei Shen. 2019. "Snow Depth Estimation on Slopes Using GPS-Interferometric Reflectometry" Sensors 19, no. 22: 4994. https://doi.org/10.3390/s19224994
APA StyleWei, H., He, X., Feng, Y., Jin, S., & Shen, F. (2019). Snow Depth Estimation on Slopes Using GPS-Interferometric Reflectometry. Sensors, 19(22), 4994. https://doi.org/10.3390/s19224994