FCG-ASpredictor: An Approach for the Prediction of Average Speed of Road Segments with Floating Car GPS Data


Abstract
:1. Introduction
2. Data Association Analyses
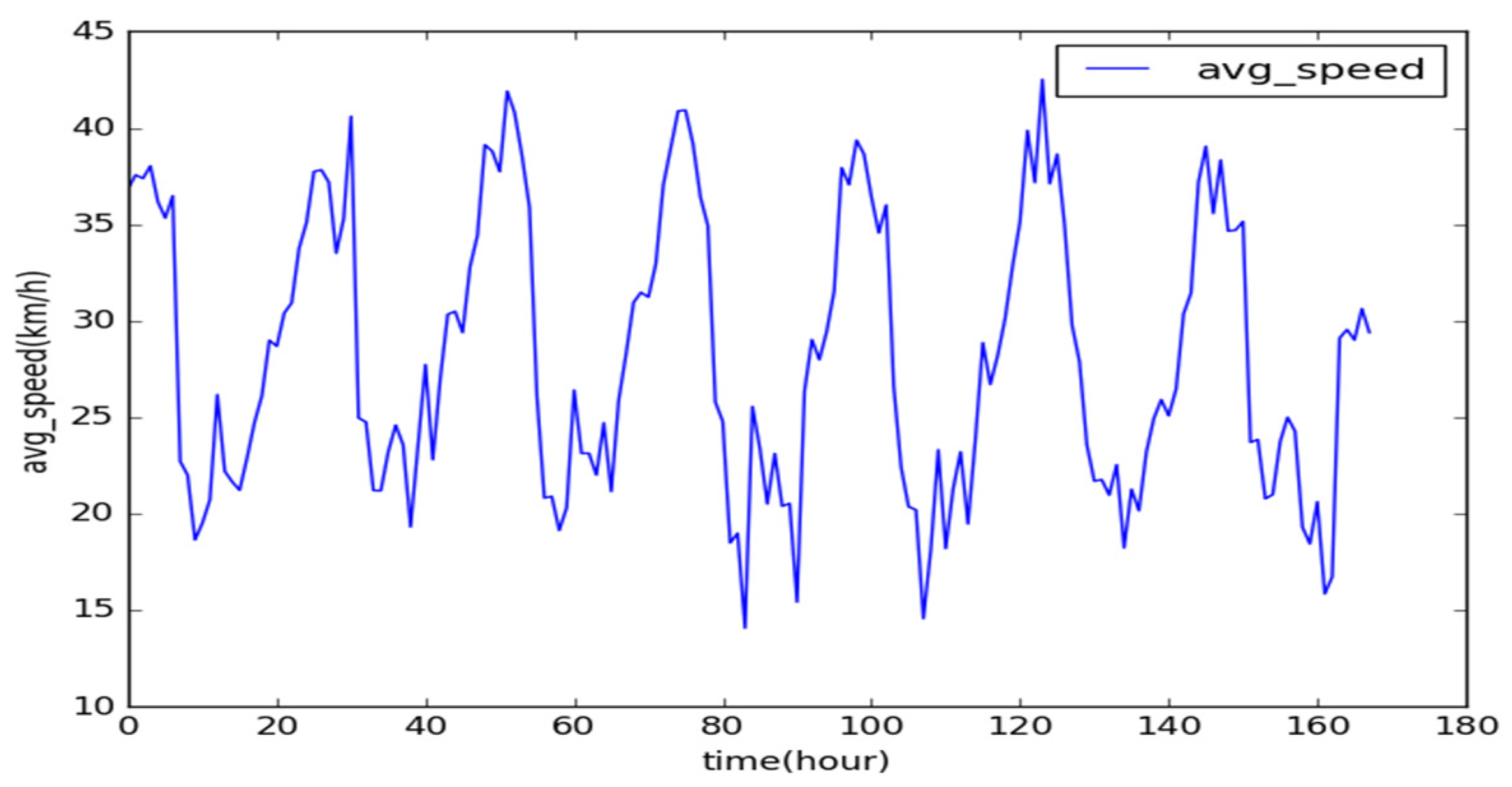
2.1. Historical Data Correlation Analyses
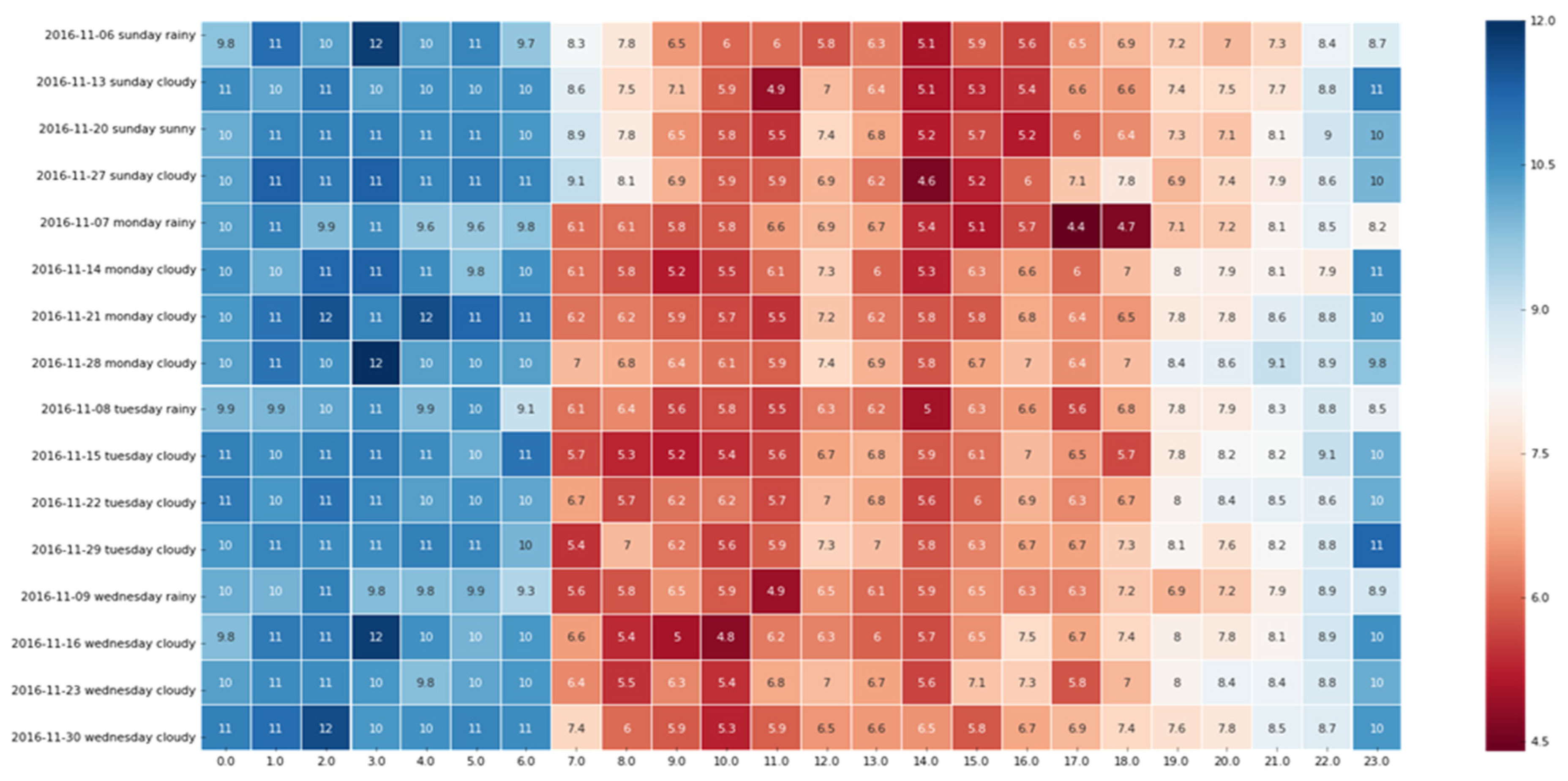
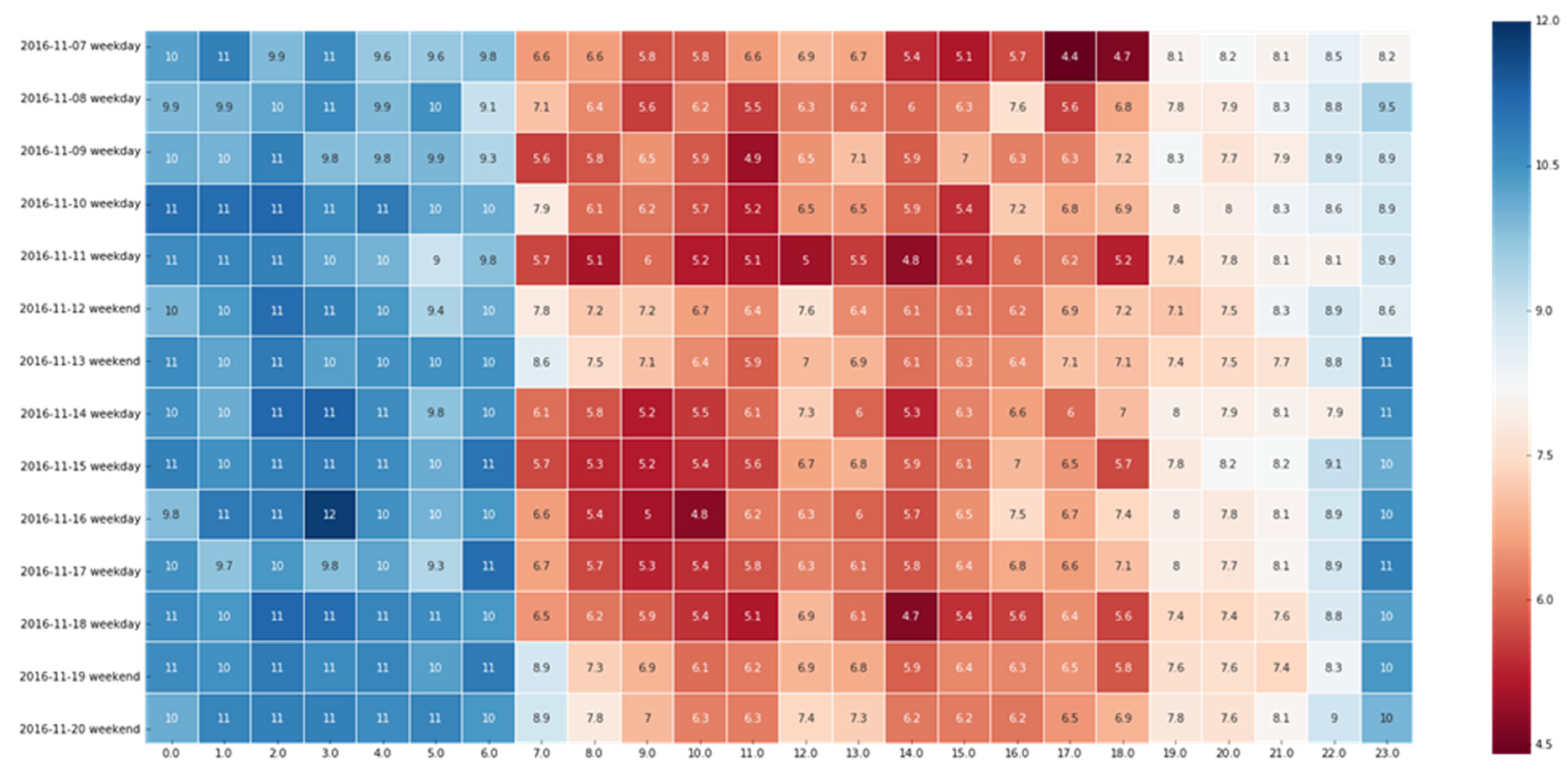
2.2. Correlation Analyses of Other Factors
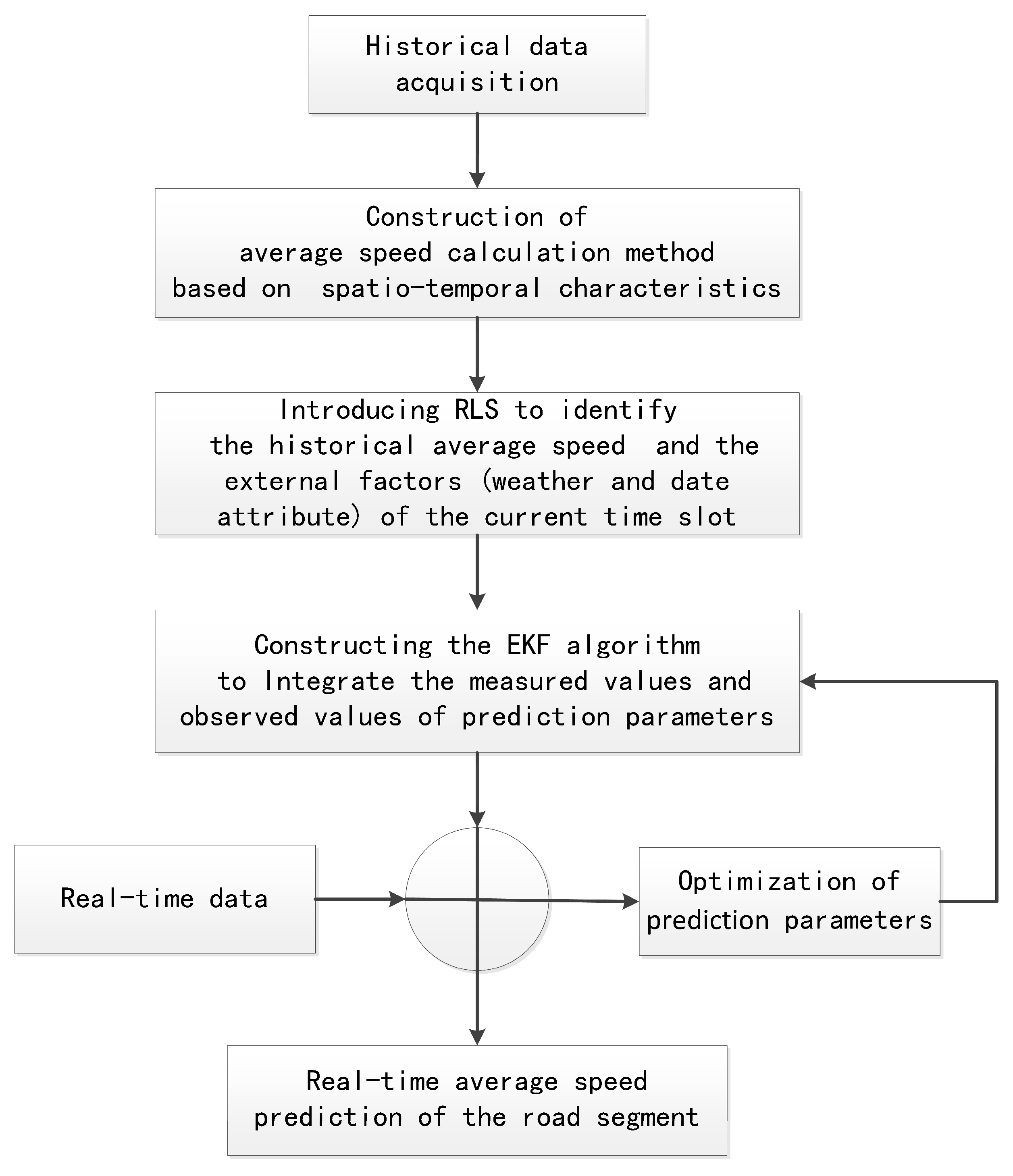
3. Materials and Methods
3.1. Study Area and Data Sources
3.2. The Computational Procedures of AS
3.3. Establishment of Multiple Regression Equations
3.4. System Identification of RLS Method
3.5. Implementation of EKF
4. Results
4.1. Data Preprocessing
4.2. Result Analysis
5. Discussion
5.1. Evaluation
5.2. Feasibility
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kong, X.; Xu, Z.; Shen, G.; Wang, J.; Yang, Q.; Zhang, B. Urban traffic congestion estimation and prediction based on floating car trajectory data. Future Gener. Comput. Syst. 2015, 61, 97–107. [Google Scholar] [CrossRef]
- Mannion, P.; Duggan, J.; Howley, E. Parallel reinforcement learning for traffic signal control. Procedia Comput. Sci. 2015, 52, 956–961. [Google Scholar] [CrossRef]
- Kong, X.; Xia, F.; Ning, Z.; Rahim, A.; Cai, Y.; Gao, Z.; Ma, J. Mobility dataset generation for vehicular social networks based on floating car data. IEEE Trans. Veh. Technol. 2018, 67, 3874–3886. [Google Scholar] [CrossRef]
- Cetin, M.; Comert, G. Short-Term Traffic Flow Prediction with Regime-Switching Models; Transportation Research Board: Washington, DC, USA, 2006; pp. 23–31. [Google Scholar]
- Chandra, S.R.; Al-Deek, H. Predictions of freeway traffic speeds and volumes using vector autoregressive models. J. Intell. Transp. Syst. 2009, 13, 53–72. [Google Scholar] [CrossRef]
- Jing, H.; Zou, Y.; Zhang, S.; Tang, J.; Wang, Y. Short-term speed prediction using remote microwave sensor data: Machine learning versus statistical model. Math. Probl. Eng. 2016, 2016, 9236156. [Google Scholar] [CrossRef]
- Chen, D.; Yan, X.; Liu, F.; Liu, X.; Wang, L.; Zhang, J. Evaluating and diagnosing road intersection operation Performance using floating car data. Sensors 2019, 19, 2256. [Google Scholar] [CrossRef]
- Queen, C.M.; Albers, C.J. Intervention and causality: Forecasting traffic flows using a dynamic bayesian network. J. Am. Stat. Assoc. 2009, 104, 669–681. [Google Scholar] [CrossRef]
- Pei, X.; Wong, S.C.; Li, Y.C.; Sze, N.N. Full bayesian method for the development of speed models: Applications of GPS probe data. J. Transp. Eng. 2012, 138, 1188–1195. [Google Scholar] [CrossRef]
- Ye, Q.; Szeto, W.Y.; Wong, S.C. Short-term traffic speed forecasting based on data recorded at irregular intervals. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1727–1737. [Google Scholar] [CrossRef]
- Yang, J.; Chou, L.; Tung, C.; Huang, S.; Wang, T. Average-speed forecast and adjustment via VANETs. IEEE Trans. Veh. Technol. 2013, 62, 4318–4327. [Google Scholar] [CrossRef]
- Yao, B.; Chen, C.; Cao, Q.; Jin, L.; Zhang, M.; Zhu, H.; Yu, B. Short-term traffic speed prediction for an urban corridor. Comput.-Aided Civ. Infrastruct. Eng. 2016, 32, 154–169. [Google Scholar] [CrossRef]
- Satrinia, D.; Saptawati, G.A.P. Traffic speed prediction from GPS data of taxi trip using support vector regression. In Proceedings of the IEEE 2017 International Conference on Data and Software Engineering (ICoDSE), Palembang, Indonesia, 1–2 November 2017. [Google Scholar]
- Zhao, J.; Gao, Y.; Bai, Z.; Lu, S.; Wang, H. Traffic speed prediction under non-recurrent congestion: Based on LSTM method and BeiDou navigation satellite system data. IEEE Intell. Transp. Syst. Mag. 2019, 11, 70–81. [Google Scholar] [CrossRef]
- Okutani, I.; Stephanedes, Y.J. Dynamic prediction of traffic volume through Kalman filtering theory. Transp. Res. Part B Methodol. 1984, 18, 1–11. [Google Scholar] [CrossRef]
- Barimani, N.; Moshiri, B.; Teshnehlab, M. State space modeling and short-term traffic speed prediction using Kalman filter based on ANFIS. IACSIT Int. J. Eng. Technol. 2012, 4, 116–120. [Google Scholar] [CrossRef]
- Mir, Z.H.; Filali, F. An adaptive Kalman filter based traffic prediction algorithm for urban road network. In Proceedings of the IEEE 12th International Conference Innovation Information Technology (IIT), Al-Ain, UAE, 28–30 November 2016. [Google Scholar]
- Liu, Y.; He, S.; Ran, B.; Cheng, Y. A progressive extended Kalman filter method for freeway traffic state estimation integrating multisource data. Wirel. Commun. Mob. Comput. 2018, 2018, 6745726. [Google Scholar] [CrossRef]
- Yuan, Y.; Van Lint, H.; Van Wageningen-Kessels, F.; Hoogendoorn, S. Network-wide traffic state estimation using loop detector and floating car data. J. Intell. Transp. Syst. 2014, 18, 41–50. [Google Scholar] [CrossRef]
- Yuan, Y.; Van Lint, J.W.C.; Wilson, R.E.; Van Wageningen-Kessels, F.; Hoogendoorn, S.P. Real-time lagrangian traffic state estimator for freeways. IEEE Trans. Intell. Transp. Syst. 2012, 13, 59–70. [Google Scholar] [CrossRef]
- Dong, C.; Xiong, Z.; Shao, C.; Zhang, H. A spatial–temporal-based state space approach for freeway network traffic flow modelling and prediction. Transp. A Transp. Sci. 2015, 11, 547–560. [Google Scholar] [CrossRef]
- Huang, Y.; Qian, L.; Feng, A.; Wu, Y.; Zhu, W. Rfid data-driven vehicle speed prediction via adaptive extended kalman filter. Sensors 2018, 18, 2787. [Google Scholar] [CrossRef]
- Kolansky, J.; Sandu, C. Enhanced polynomial chaos-based extended Kalman filter technique for parameter estimation. J. Comput. Nonlinear Dyn. 2018, 13, 021012. [Google Scholar] [CrossRef]
- Comert, G.; Bezuglov, A.; Cetin, M. Adaptive traffic parameter prediction: Effect of number of states and transferability of models. Trans. Res. Part C Emerg. Technol. 2016, 72, 202–224. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An improved fuzzy neural network for traffic speed prediction considering periodic characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Kulkarni, P.; Lewis, T.; Fan, Z. Simple traffic prediction mechanism and its applications in wireless networks. Wirel. Pers. Commun. 2011, 59, 261–274. [Google Scholar] [CrossRef]
- Wang, X.; Xu, L.; Chen, K. Data-driven short-term forecasting for urban road network traffic based on data processing and LSTM-RNN. Arab. J. Sci. Eng. 2019, 44, 3043–3060. [Google Scholar]
- Xu, D.; Wang, Y.; Jia, L.; Qin, Y.; Dong, H. Real-time road traffic state prediction based on ARIMA and Kalman filter. Front. Inf. Technol. Electron. Eng. 2017, 18, 287–302. [Google Scholar] [CrossRef]
- Szczepanska, A.; Senetra, A.; Wasilewicz-Pszczolkowska, M. The effect of road traffic noise on the prices of residential property-A case study of the polish city of Olsztyn. Transp. Res. Part D Transp. Environ. 2015, 36, 167–177. [Google Scholar] [CrossRef]
- Wei, G.; Wang, H.; Lin, R. Application of correlation coefficient to interval-valued intuitionistic fuzzy multiple attribute decision-making with incomplete weight information. Knowl. Inf. Syst. 2011, 26, 337–349. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17), San Francisco, CA, USA, 4–9 February 2017; pp. 1655–1661. [Google Scholar]
- Xia, F.; Wang, J.; Kong, X.; Wang, Z.; Li, J.; Liu, C. Exploring human mobility patterns in urban scenarios: A trajectory data perspective. IEEE Commun. Mag. 2018, 56, 142–149. [Google Scholar] [CrossRef]
- Nahar, L.; Sultana, Z. A new travel time prediction method for intelligent transportation system. IOSR J. Comput. Eng. 2014, 16, 24–30. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Timeslots | Seg. 1 | Seg. 2 | Seg. 3 | Seg. 4 |
|---|---|---|---|---|
| previous 1 h | 0.4340 | 0.4398 | 0.4477 | 0.5475 |
| previous 2 h | 0.2865 | 0.3252 | 0.2934 | 0.3287 |
| previous 3 h | 0.2116 | 0.2545 | 0.2005 | 0.2289 |
| previous 4 h | 0.1683 | 0.2510 | 0.1472 | 0.1775 |
| previous 5 h | 0.2289 | 0.2223 | 0.1553 | 0.1599 |
| previous 6 h | 0.1050 | 0.0888 | 0.1309 | 0.1479 |
| simultaneous timeslot of previous day | 0.1969 | 0.1381 | 0.1368 | 0.1937 |
| simultaneous timeslot of previous 2 days | –0.0483 | –0.0557 | –0.1026 | –0.0888 |
| simultaneous timeslot of previous 3 days | –0.1666 | –0.1473 | –0.1116 | –0.1150 |
| simultaneous timeslot of previous 4 days | –0.1711 | –0.0473 | –0.0499 | –0.0307 |
| simultaneous timeslot of previous 5 days | –0.0394 | –0.0162 | –0.0429 | –0.0580 |
| simultaneous timeslot of previous 6 days | 0.1305 | 0.1193 | 0.0263 | 0.0979 |
| simultaneous timeslot of previous 7 days | 0.2015 | 0.1923 | 0.1353 | 0.1240 |
| Item | Description |
|---|---|
| driver ID | desensitization |
| order ID | desensitization |
| timestamp | Unix epoch |
| latitude | dd.ddddd |
| longitude | ddd.ddddd |
| status | 0: empty; 1: passenger; 2: parking |
| ID | Road Segment |
|---|---|
| 01_521 | Second Section of North Third Ring Road |
| 03_6479 | North Third Section of First Ring Road |
| 04_6276 | First Section of Hongxing Road |
| 06_28250 | Third Section of Jinxianqiao Road |
| Quantized Value | Weather Condition | Date Attribute |
|---|---|---|
| 1 | sunny, cloudy | first and last weekday |
| 2 | light rain, sleet | other weekdays |
| 3 | rain | weekend |
| 4 | heavy rain | first and last day of the holidays |
| 5 | snow, heavy snow | other holidays |
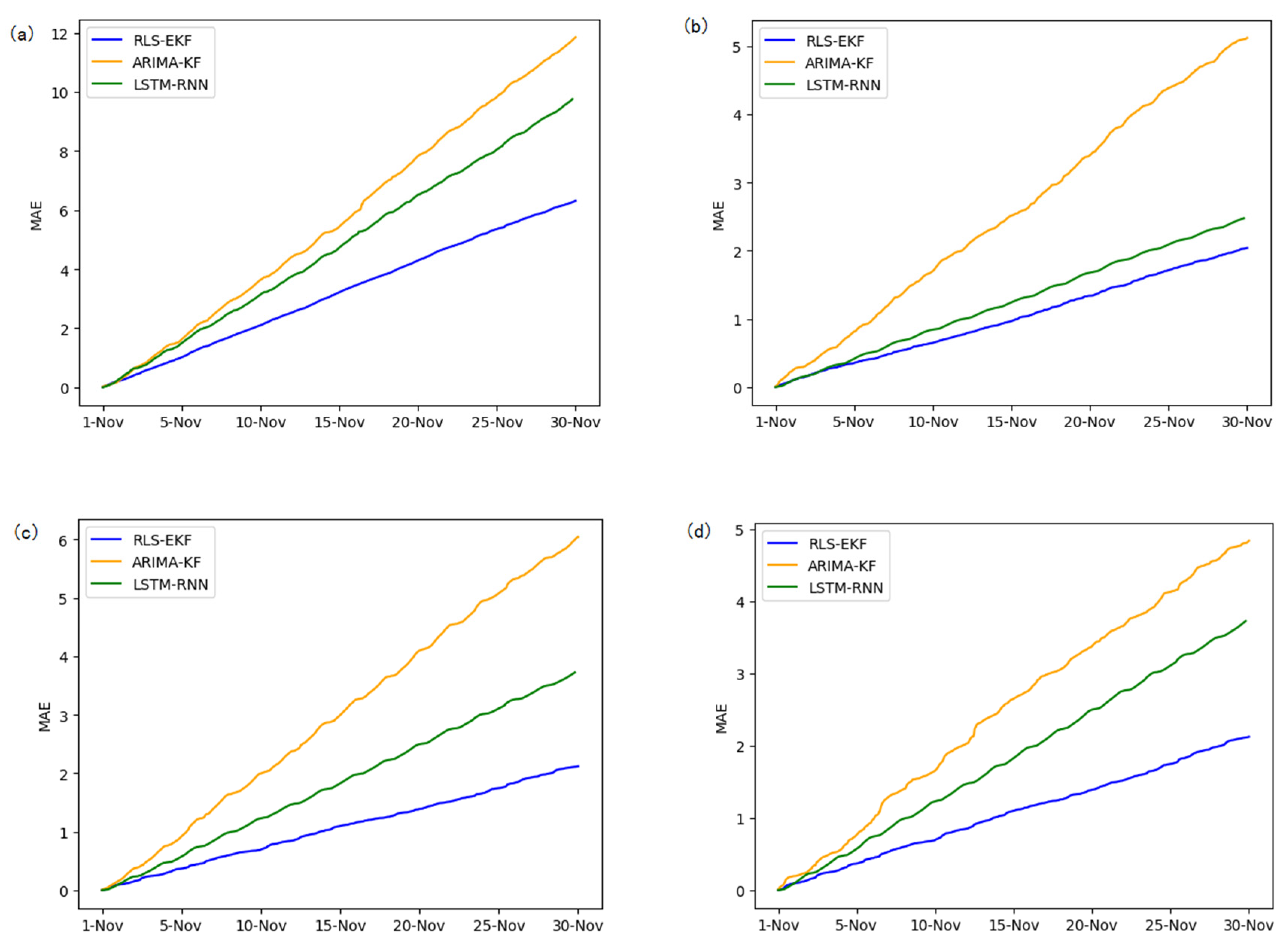
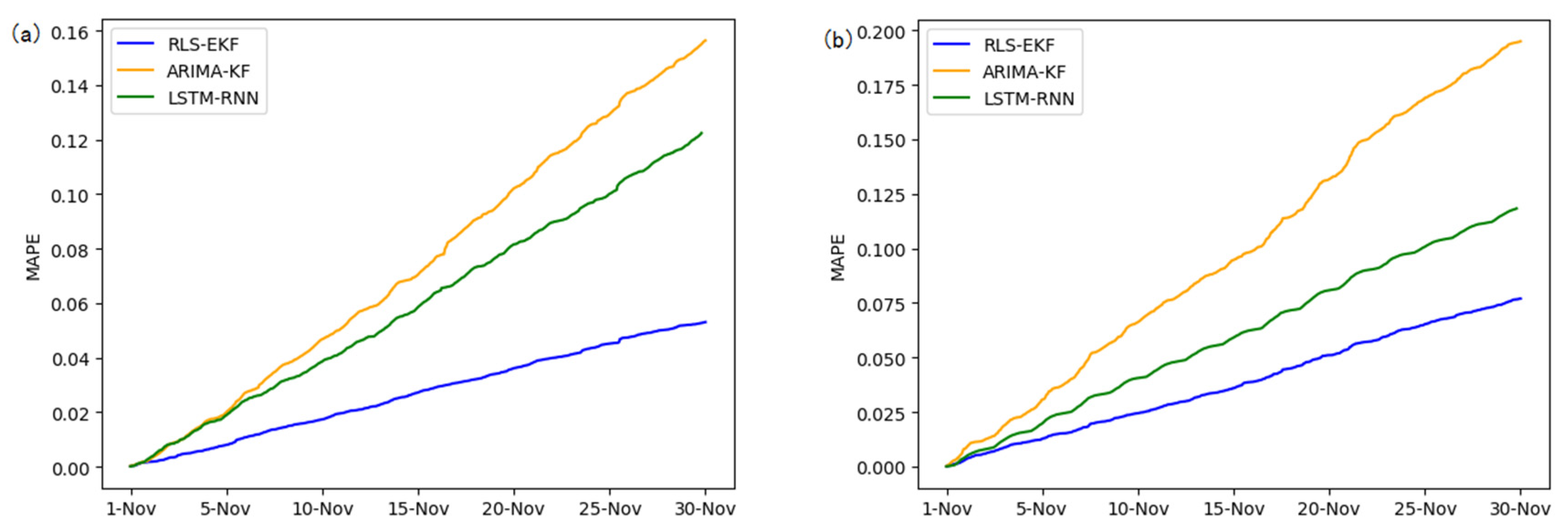
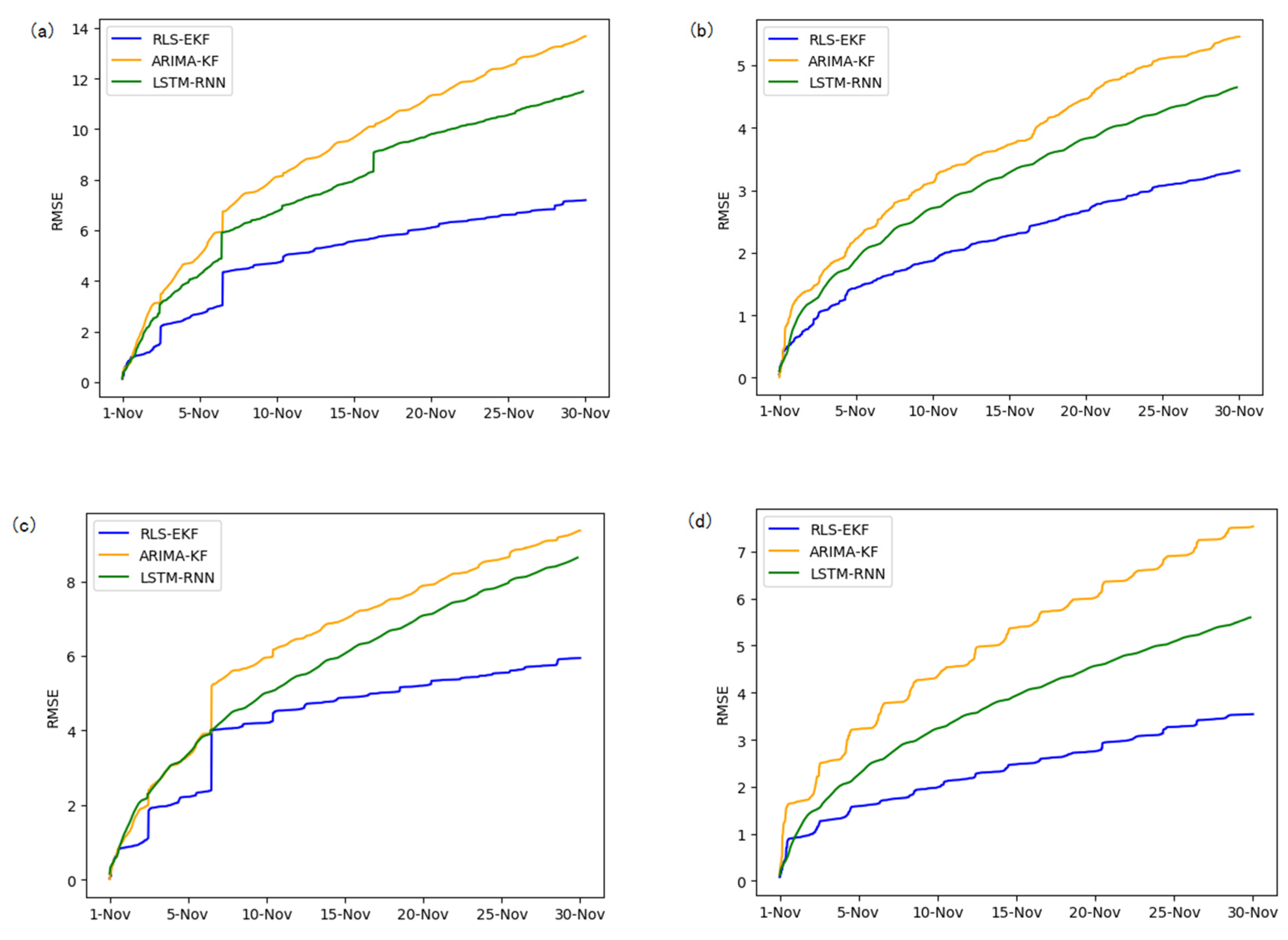
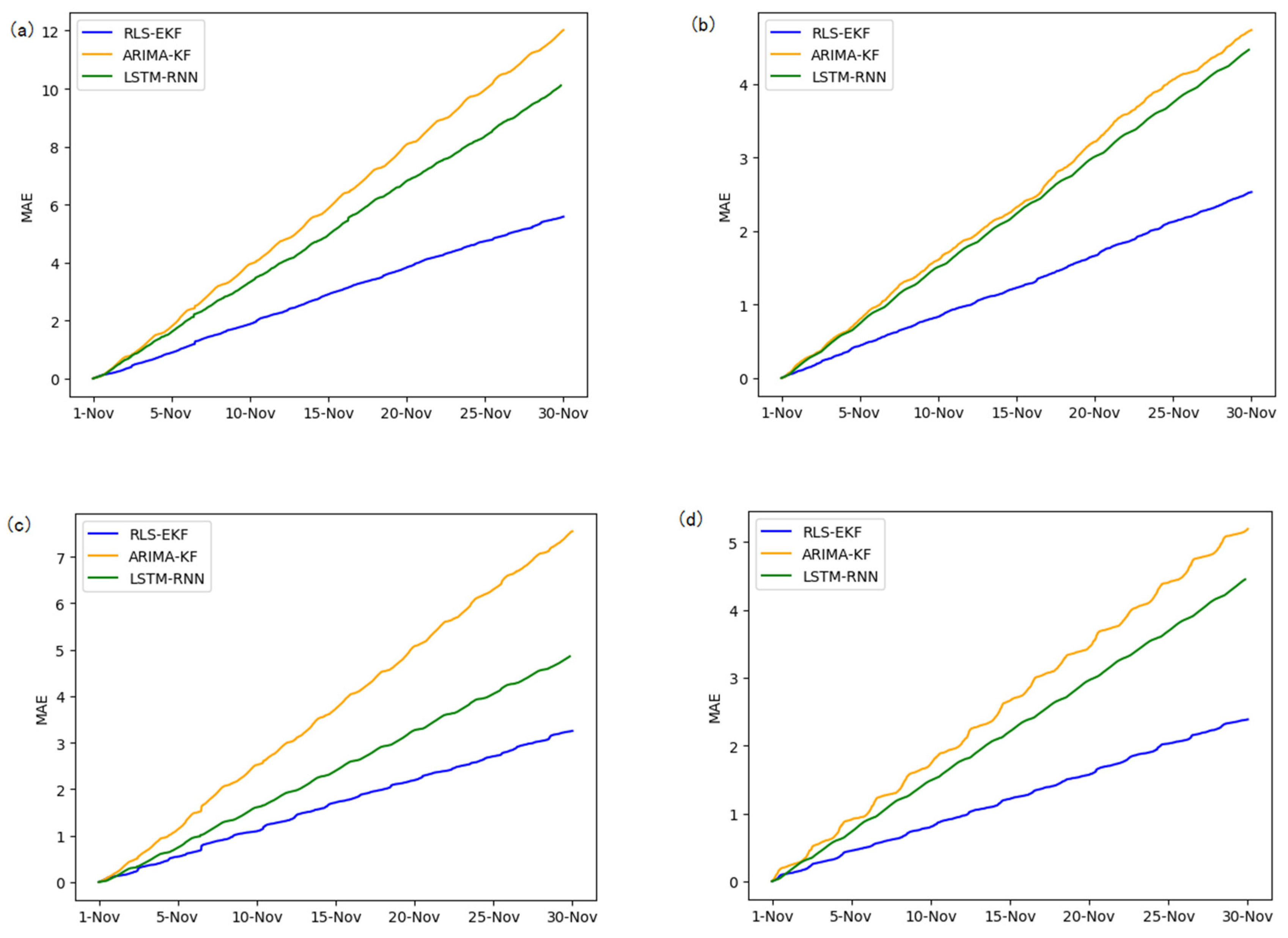
| Segment | Approach | 15 min | 30 min | 1 h | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAE | MAPE | RMSE | MAE | MAPE | RMSE | MAE | MAPE | ||
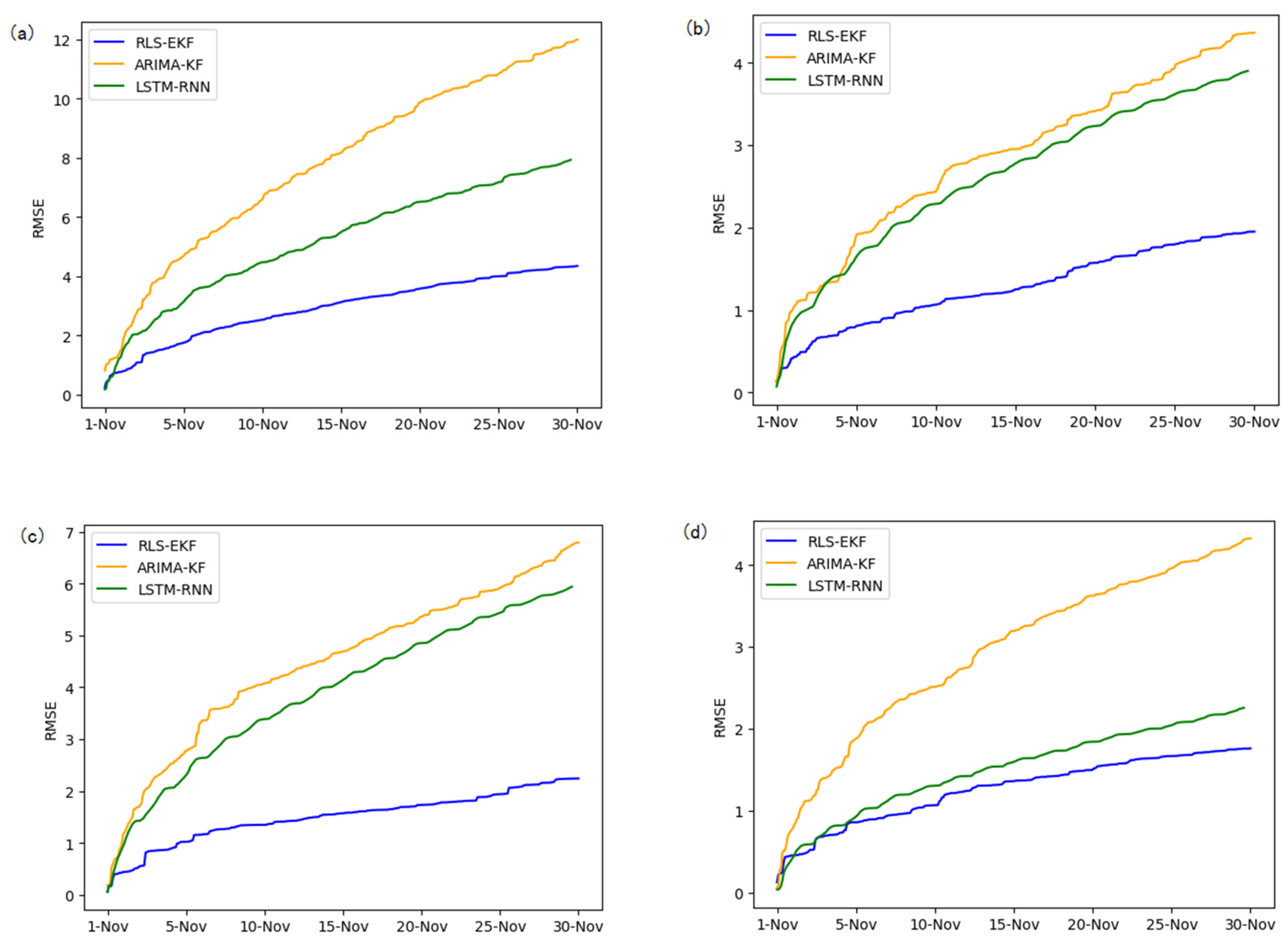
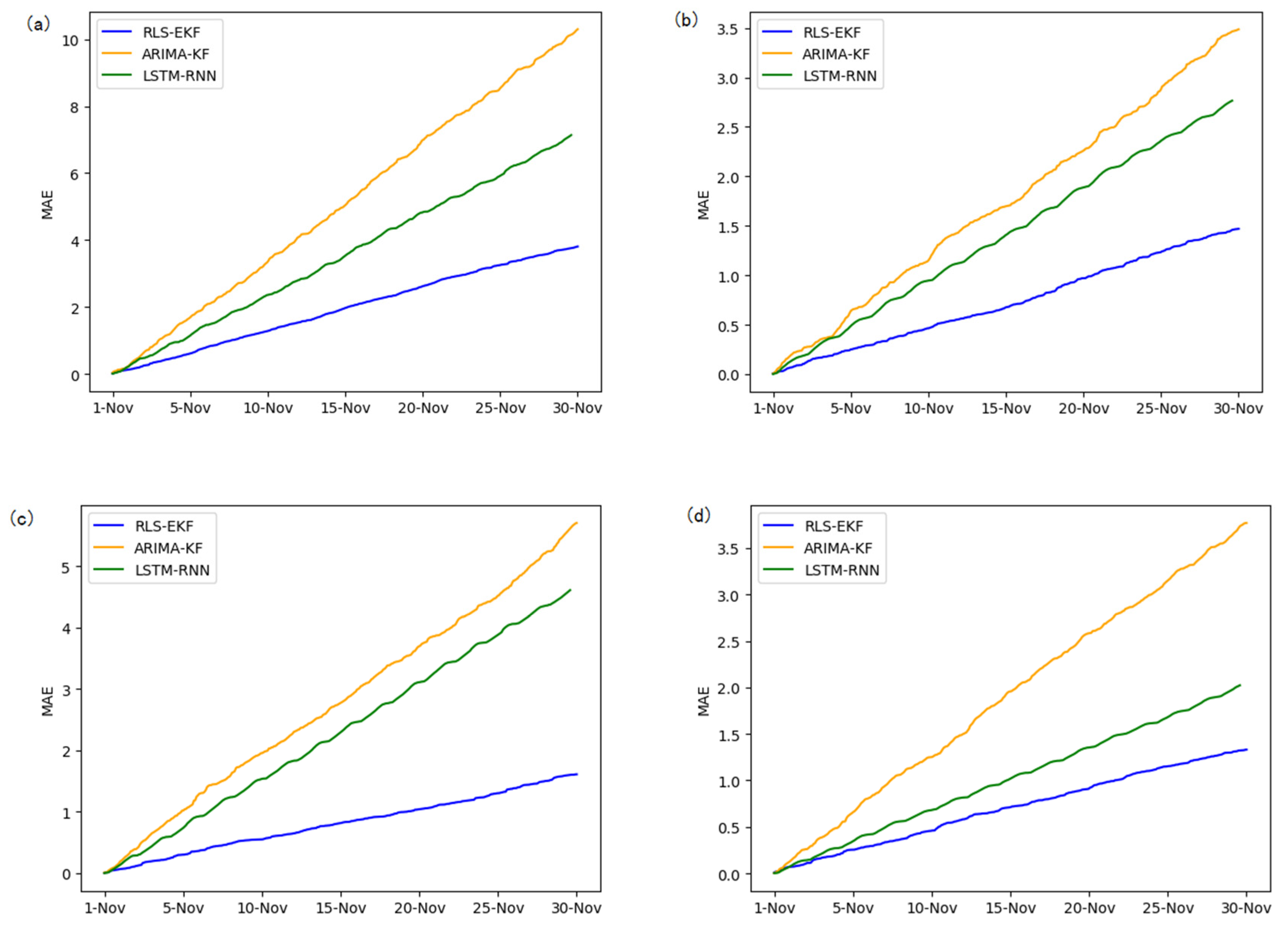
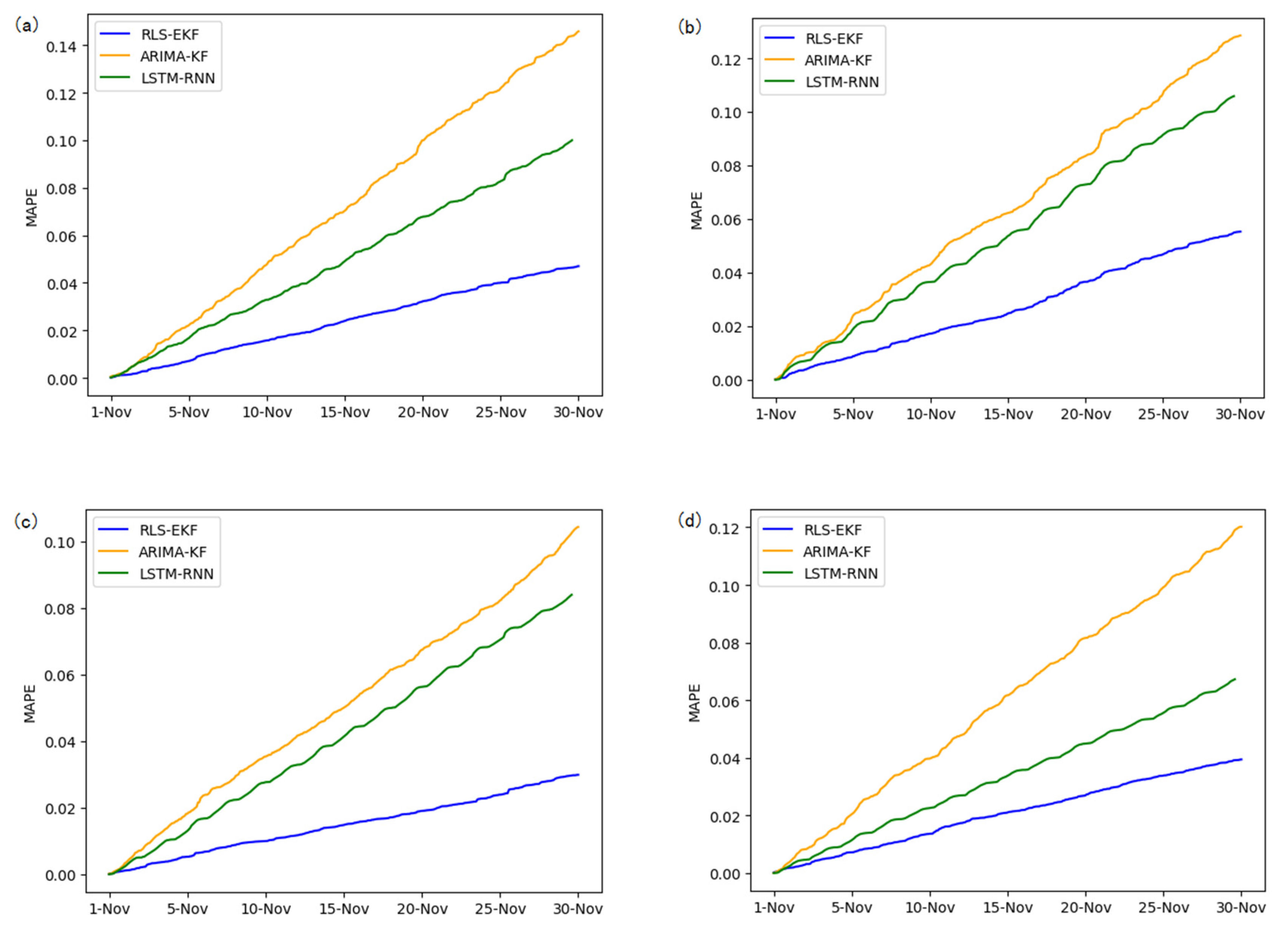
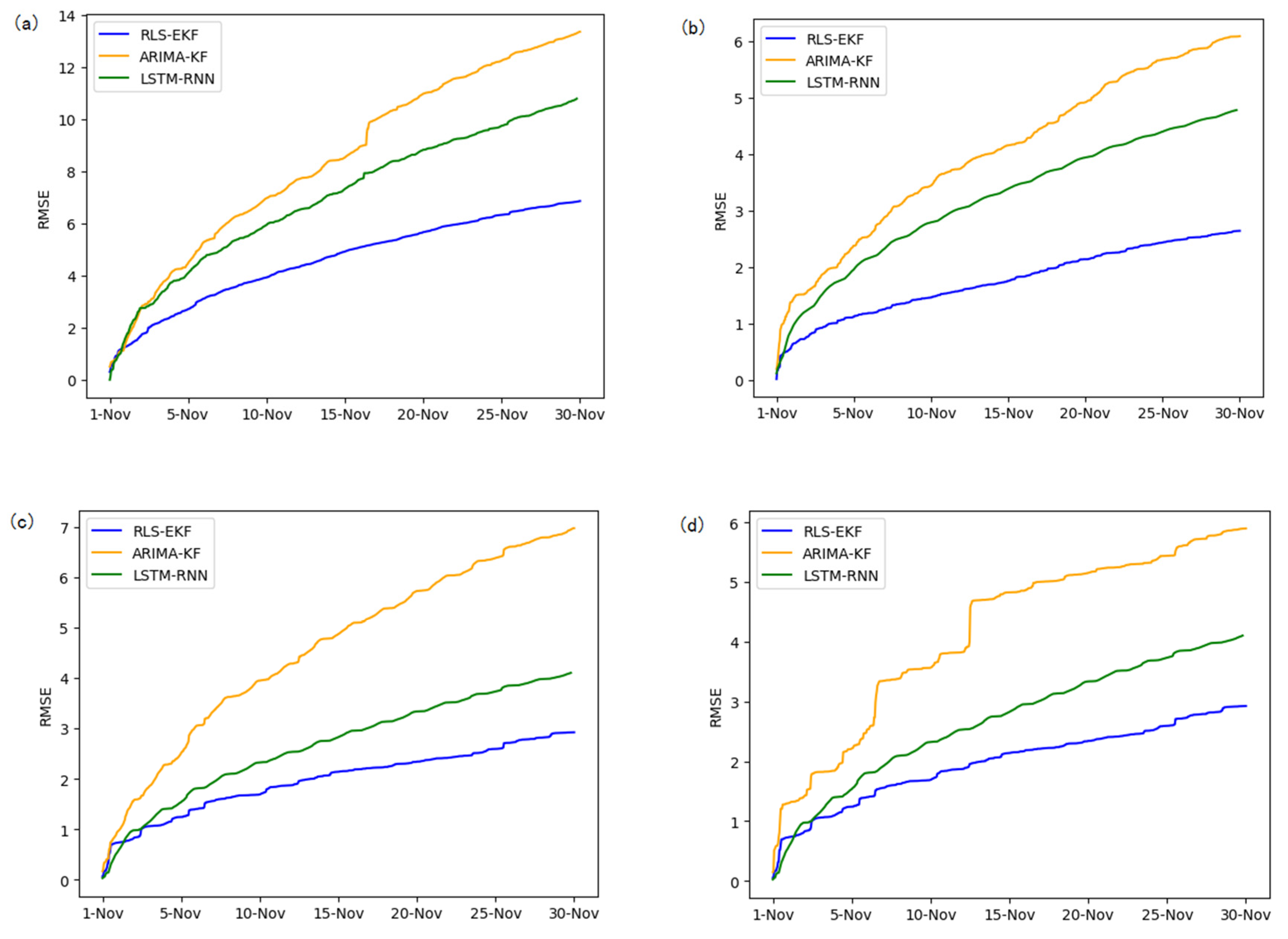
| 01_521 | ARIMA-KF | 12.01 | 10.30 | 14.6% | 13.36 | 11.84 | 15.6% | 13.67 | 12.01 | 19.1% |
| LSTM-RNN | 7.81 | 6.87 | 9.1% | 10.58 | 9.83 | 12.2% | 11.15 | 10.43 | 15.8% | |
| RLS-EKF | 4.35 | 3.81 | 4.7% | 6.86 | 6.31 | 5.3% | 7.19 | 5.58 | 9.2% | |
| 03_6479 | ARIMA-KF | 4.36 | 3.48 | 12.8% | 6.09 | 5.12 | 19.5% | 5.45 | 4.74 | 19.4% |
| LSTM-RNN | 3.83 | 2.82 | 10.9% | 4.64 | 2.43 | 11.7% | 4.67 | 4.52 | 18.2% | |
| RLS-EKF | 1.95 | 1.46 | 5.5% | 2.64 | 2.04 | 7.7% | 3.31 | 2.53 | 9.2% | |
| 04_6276 | ARIMA-KF | 6.79 | 5.70 | 10.4% | 6.98 | 6.05 | 11.7% | 9.36 | 7.54 | 14.7% |
| LSTM-RNN | 5.84 | 4.52 | 8.5% | 4.01 | 3.82 | 7.3% | 8.33 | 4.69 | 9.1% | |
| RLS-EKF | 2.24 | 1.61 | 3.0% | 2.92 | 2.12 | 3.9% | 5.94 | 3.25 | 6.1% | |
| 06_28250 | ARIMA-KF | 4.32 | 3.77 | 12.0% | 5.90 | 4.84 | 13.7% | 7.54 | 5.19 | 15.9% |
| LSTM-RNN | 2.26 | 2.02 | 6.8% | 4.23 | 3.85 | 7.3% | 5.21 | 4.63 | 11.2% | |
| RLS-EKF | 1.76 | 1.33 | 3.9% | 2.92 | 2.13 | 5.3% | 3.54 | 2.39 | 6.8% | |
| Segment | Prediction Horizon | Miss-AS-hst | Miss-AS-ft | Miss-WC-ct | Miss-DA-ct | No Missing Factor |
|---|---|---|---|---|---|---|
| 01_521 | 15 min | 5.84 | 4.98 | 4.57 | 4.38 | 4.35 |
| 30 min | 7.69 | 7.21 | 7.02 | 6.89 | 6.86 | |
| 1 h | 7.85 | 7.34 | 7.23 | 7.22 | 7.19 | |
| 03_6479 | 15 min | 3.05 | 2.88 | 2.60 | 2.52 | 1.95 |
| 30 min | 3.23 | 2.87 | 2.75 | 2.69 | 2.64 | |
| 1 h | 3.92 | 3.48 | 3.41 | 3.36 | 3.31 | |
| 04_6276 | 15 min | 2.70 | 2.28 | 2.50 | 2.35 | 2.24 |
| 30 min | 3.51 | 3.03 | 3.01 | 2.95 | 2.92 | |
| 1 h | 6.39 | 6.08 | 6.03 | 5.98 | 5.94 | |
| 06_28250 | 15 min | 2.41 | 1.89 | 1.83 | 1.80 | 1.76 |
| 30 min | 3.76 | 3.05 | 3.03 | 2.97 | 2.92 | |
| 1 h | 3.92 | 3.64 | 3.62 | 3.61 | 3.54 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, D.; Shen, G.; Liu, D.; Chen, J.; Zhang, Y. FCG-ASpredictor: An Approach for the Prediction of Average Speed of Road Segments with Floating Car GPS Data. Sensors 2019, 19, 4967. https://doi.org/10.3390/s19224967
Zhu D, Shen G, Liu D, Chen J, Zhang Y. FCG-ASpredictor: An Approach for the Prediction of Average Speed of Road Segments with Floating Car GPS Data. Sensors. 2019; 19(22):4967. https://doi.org/10.3390/s19224967
Chicago/Turabian StyleZhu, Difeng, Guojiang Shen, Duanyang Liu, Jingjing Chen, and Yijiang Zhang. 2019. "FCG-ASpredictor: An Approach for the Prediction of Average Speed of Road Segments with Floating Car GPS Data" Sensors 19, no. 22: 4967. https://doi.org/10.3390/s19224967
APA StyleZhu, D., Shen, G., Liu, D., Chen, J., & Zhang, Y. (2019). FCG-ASpredictor: An Approach for the Prediction of Average Speed of Road Segments with Floating Car GPS Data. Sensors, 19(22), 4967. https://doi.org/10.3390/s19224967