Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates †



Abstract
1. Introduction
- The signal processing for a localization approach to localize moving, non-cooperative objects recursively, using delay estimates from a network of spatially distributed transmitting and receiving nodes.
- The derivation of performance bounds including the CRLB on position estimation and the PCRLB on nonlinear sequential Bayesian estimation.
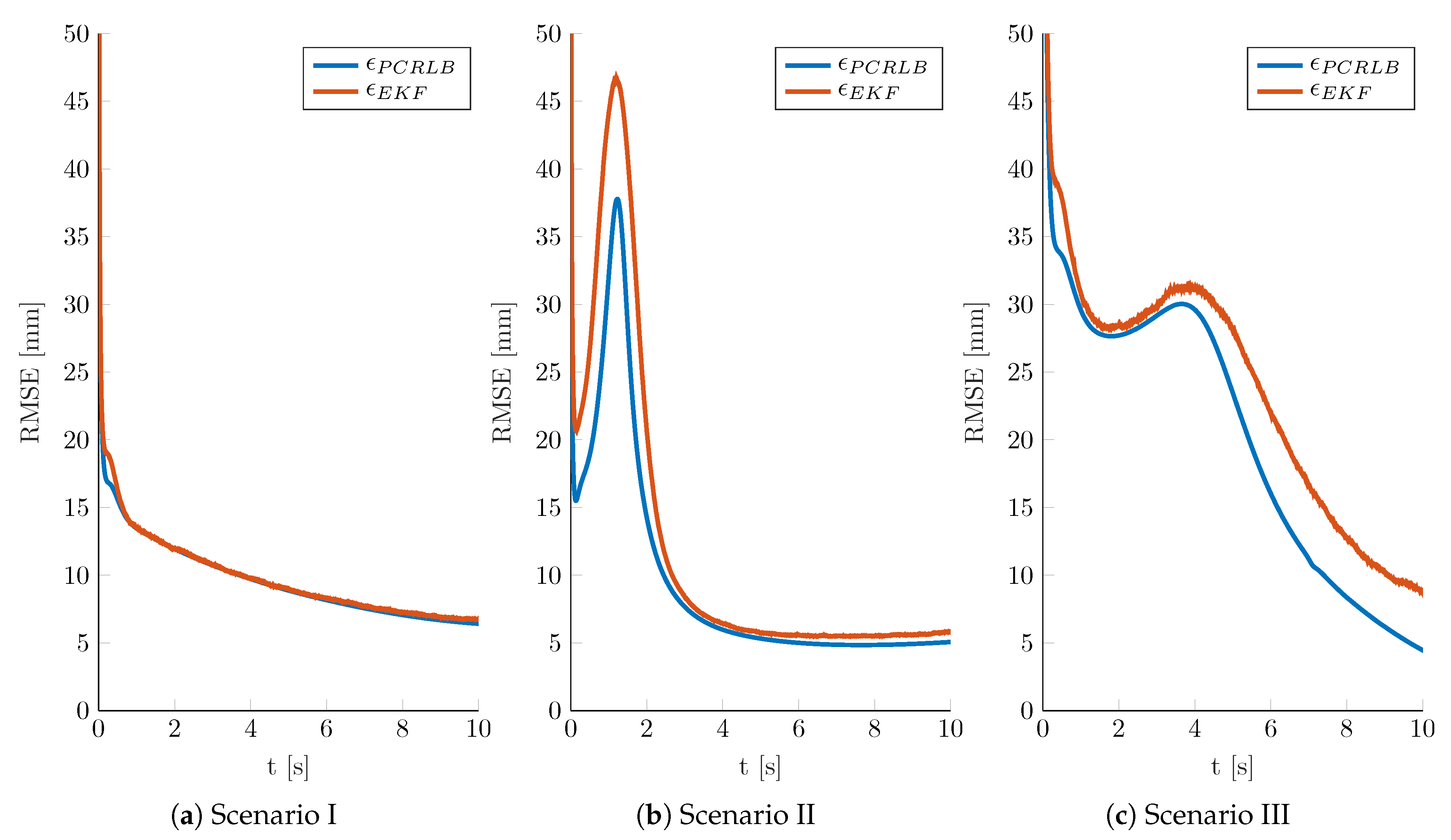
- The validation of the applicability of an EKF for the introduced localization problem via Monte Carlo simulations and a comparison to the PCRLB.
- The application of the proposed localization approach to wideband measurement data of an outdoor experiment for localizing a walking pedestrian.
2. Network and Measurement Model
3. Localization and Tracking
3.1. Calibration Stage
3.2. Estimation Stage
3.3. Tracking Stage
4. Performance Bounds
4.1. Cramér–Rao Lower Bound on Position Estimation
4.2. Posterior Cramér–Rao Lower Bound for Nonlinear Sequential Bayesian Estimation
5. Case Study
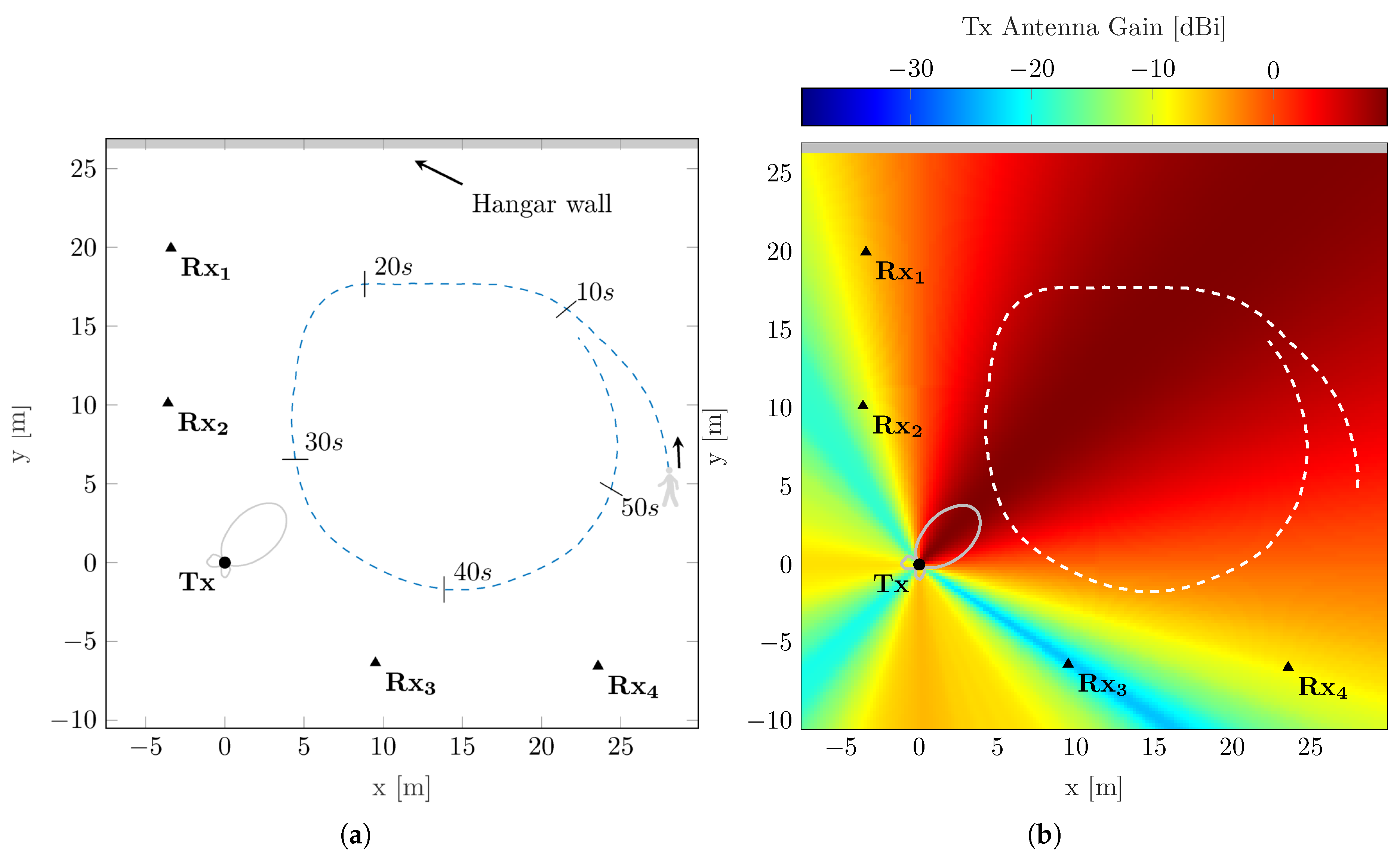
5.1. Network and Measurement Setup
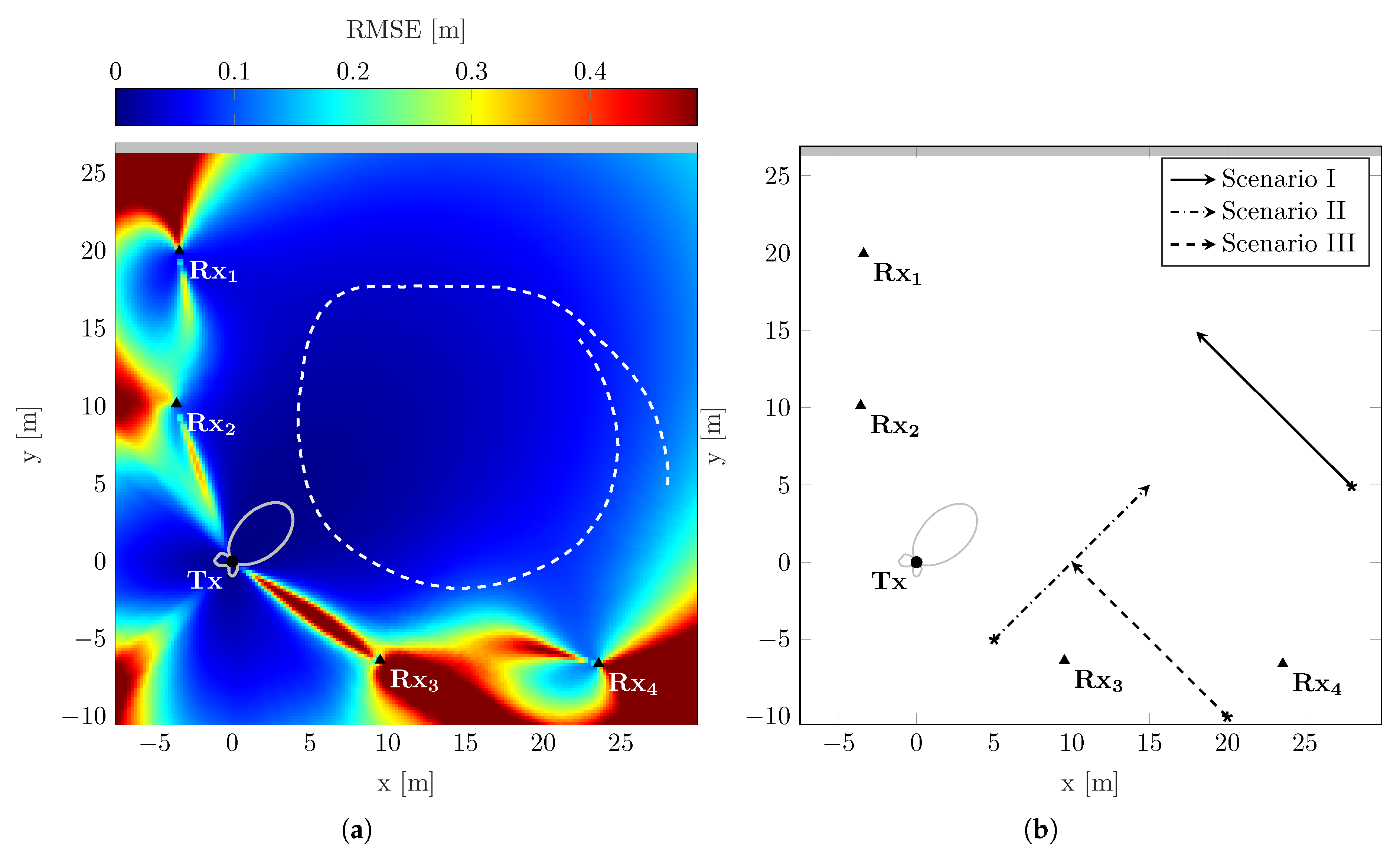
5.2. Theoretical Performance Evaluation
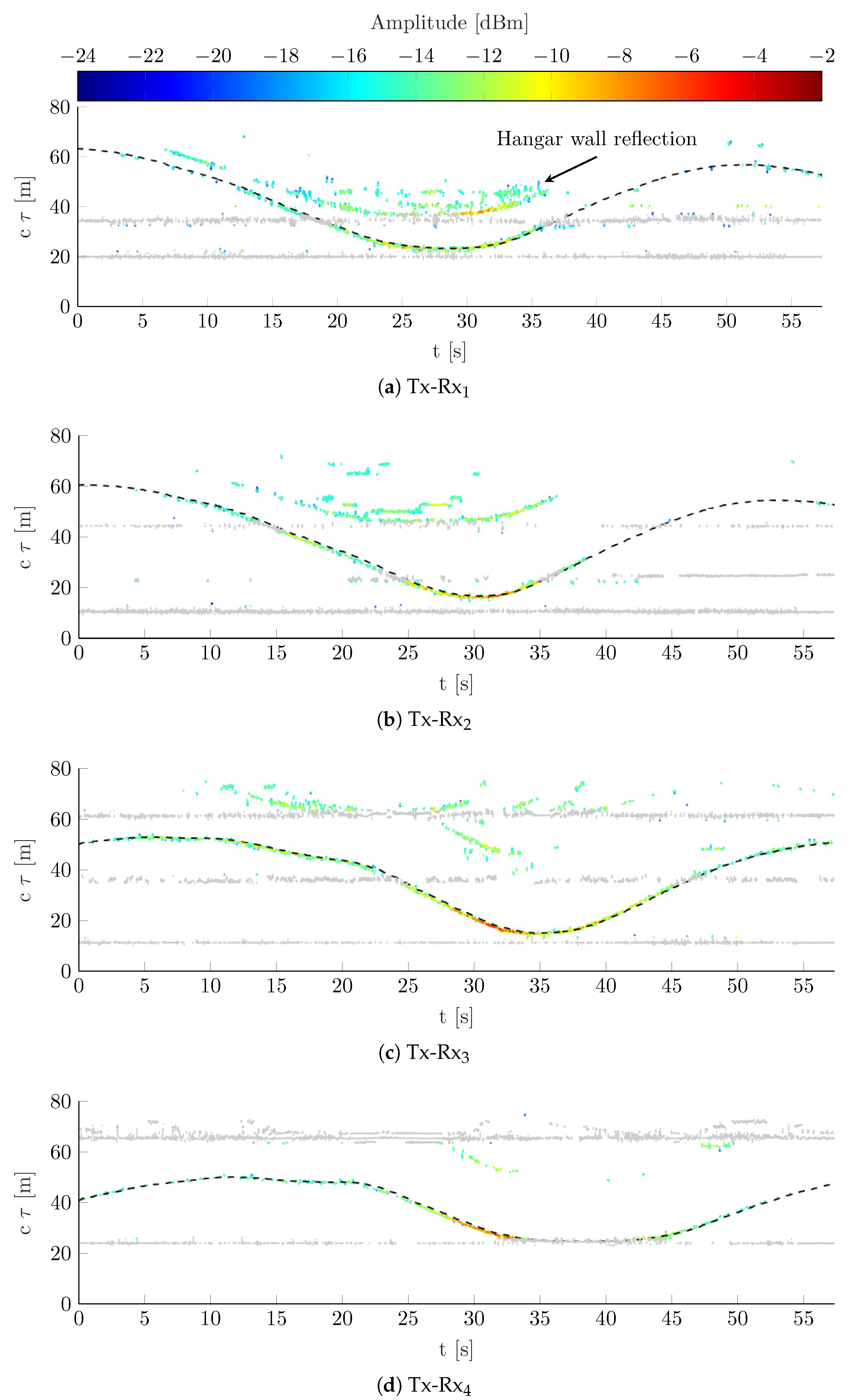
5.3. Measurement Based Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CDF | cumulative distribution function |
| CIR | channel impulse response |
| CRLB | Cramér–Rao lower bound |
| EKF | extended Kalman filter |
| FIM | Fisher information matrix |
| KEST | Kalman enhanced super resolution tracking |
| LoS | line-of-sight |
| MPC | multipath component |
| MSE | mean square error |
| PCL | passive coherent location |
| PCRLB | posterior Cramér–Rao lower bound |
| RCS | radar cross-section |
| RMSE | root mean square error |
| SNR | signal-to-noise ratio |
References
- Biswas, S.; Tatchikou, R.; Dion, F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Mag. 2006, 44, 74–82. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, L.P. A Tutorial Survey on Vehicular Ad Hoc Networks. IEEE Commun. Mag. 2008, 46, 164–171. [Google Scholar] [CrossRef]
- De Ponte Müller, F. Survey on Ranging Sensors and Cooperative Techniques for Relative Positioning of Vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed]
- Jo, K.; Kim, J.; Kim, D.; Jang, C.; Sunwoo, M. Development of Autonomous Car—Part II: A Case Study on the Implementation of an Autonomous Driving System Based on Distributed Architecture. IEEE Trans. Ind. Electron. 2015, 62, 5119–5132. [Google Scholar] [CrossRef]
- Munoz-Ferreras, J.M.; Perez-Martinez, F.; Calvo-Gallego, J.; Asensio-Lopez, A.; Dorta-Naranjo, B.P.; Blanco-del-Campo, A. Traffic Surveillance System Based on a High-Resolution Radar. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1624–1633. [Google Scholar] [CrossRef]
- Sivaraman, S.; Trivedi, M.M. Looking at Vehicles on the Road: A Survey of Vision-Based Vehicle Detection, Tracking, and Behavior Analysis. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1773–1795. [Google Scholar] [CrossRef]
- Schmidhammer, M.; Sand, S.; Soliman, M.; de Ponte Müller, F. 5G Signal Design for Road Surveillance. In Proceedings of the 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017. [Google Scholar]
- Thomä, R.S.; Andrich, C.; Del Galdo, G.; Döbereiner, M.; Hein, M.A.; Käske, M.; Schäfer, G.; Schieler, S.; Schneider, C.; Schwind, A.; et al. Cooperative Passive Coherent Location: A Promising 5G Service to Support Road Safety. IEEE Commun. Mag. 2019, 57, 86–92. [Google Scholar] [CrossRef]
- Griffiths, H.D.; Baker, C.J. Passive coherent location radar systems. Part 1: Performance prediction. IEE Proc. Radar Sonar Navig. 2005, 152, 153–159. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO Radar with Widely Separated Antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Griffiths, H.D.; Al-Ashwal, W.A.; Ward, K.D.; Tough, R.J.A.; Baker, C.J.; Woodbridge, K. Measurement and modelling of bistatic radar sea clutter. IET Radar Sonar Navig. 2010, 4, 280–292. [Google Scholar] [CrossRef]
- Filip, A.; Shutin, D. Cramér-Rao bounds for L-band digital aeronautical communication system type 1 based passive multiple-input multiple-output radar. IET Radar Sonar Navig. 2016, 10, 348–358. [Google Scholar] [CrossRef]
- Falcone, P.; Colone, F.; Lombardo, P. Potentialities and challenges of WiFi-based passive radar. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 15–26. [Google Scholar] [CrossRef]
- Pastina, D.; Colone, F.; Martelli, T.; Falcone, P. Parasitic Exploitation of Wi-Fi Signals for Indoor Radar Surveillance. IEEE Trans. Veh. Technol. 2015, 64, 1401–1415. [Google Scholar] [CrossRef]
- Colone, F.; Martelli, T.; Bongioanni, C.; Pastina, D.; Lombardo, P. WiFi-based PCL for monitoring private airfields. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 22–29. [Google Scholar] [CrossRef]
- Sobhani, B.; Paolini, E.; Giorgetti, A.; Mazzotti, M.; Chiani, M. Target Tracking for UWB Multistatic Radar Sensor Networks. IEEE J. Sel. Top. Signal Process. 2014, 8, 125–136. [Google Scholar] [CrossRef]
- Schmidhammer, M.; Gentner, C.; Siebler, B. Localization of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. In Proceedings of the 2019 International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar]
- Jost, T.; Wang, W.; Fiebig, U.; Perez-Fontan, F. Detection and Tracking of Mobile Propagation Channel Paths. IEEE Trans. Antennas Propag. 2012, 60, 4875–4883. [Google Scholar] [CrossRef]
- Karedal, J.; Tufvesson, F.; Czink, N.; Paier, A.; Dumard, C.; Zemen, T.; Mecklenbrauker, C.F.; Molisch, A.F. A geometry-based stochastic MIMO model for vehicle-to-vehicle communications. IEEE Trans. Wirel. Commun. 2009, 8, 3646–3657. [Google Scholar] [CrossRef]
- Pelleg, D.; Moore, A. X-means: Extending k-means with efficient estimation of the number of clusters. In Proceedings of the 17th International Conference on Machine Learning (ICML), Stanford, CA, USA, 29 June–2 July 2000; pp. 727–734. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Mensing, C.; Plass, S. Positioning algorithms for cellular networks using TDOA. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing, Toulouse, France, 14–19 May 2006; Volume 4, pp. 513–516. [Google Scholar]
- Bar-Shalom, Y.; Li, X.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Tichavsky, P.; Muravchik, C.H.; Nehorai, A. Posterior Cramér-Rao Bounds for Discrete-Time Nonlinear Filtering. IEEE Trans. Signal Process. 1998, 46, 1386–1396. [Google Scholar] [CrossRef]
- Van Trees, H.L.; Bell, K.L. Bayesian Bounds for Parameter Estimation and Nonlinear Filtering/Tracking; Wiley-IEEE Press: Hoboken, NJ, USA, 2007. [Google Scholar]
- Siebler, B.; Sand, S. Posterior Cramér-Rao Bound and Suboptimal Filtering for IMU/GNSS based Cooperative Train Localization. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 353–358. [Google Scholar]
- Gentner, C.; Jost, T.; Wang, W.; Zhang, S.; Dammann, A.; Fiebig, U. Multipath Assisted Positioning with Simultaneous Localization and Mapping. IEEE Trans. Wirel. Commun. 2016, 15, 6104–6117. [Google Scholar] [CrossRef]
- Huber & Suhner. SENCITY Spot-S WiFi Dual-Band Antenna 1399.17.0210; Huber & Suhner: Herisau, Switzerland, 2019. [Google Scholar]
- Schmidhammer, M.; de Ponte Müller, F.; Sand, S.; Rashdan, I. Detection and Localization of Non-Cooperative Road Users based on Propagation Measurements at C-Band. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–5. [Google Scholar]
- Chiani, M.; Giorgetti, A.; Paolini, E. Sensor Radar for Object Tracking. Proc. IEEE 2018, 106, 1022–1041. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center frequency | GHz |
| Bandwidth B | 120 MHz |
| Signal period | μs |
| Measurement rate | ms |
| Transmit power | 37 dBm |
| Antenna gain | 9 dBi (small directional [28]) |
| Antenna gain | 8 dBi (toroidal, omni-directional) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidhammer, M.; Gentner, C.; Siebler, B.; Sand, S. Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. Sensors 2019, 19, 4802. https://doi.org/10.3390/s19214802
Schmidhammer M, Gentner C, Siebler B, Sand S. Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. Sensors. 2019; 19(21):4802. https://doi.org/10.3390/s19214802
Chicago/Turabian StyleSchmidhammer, Martin, Christian Gentner, Benjamin Siebler, and Stephan Sand. 2019. "Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates" Sensors 19, no. 21: 4802. https://doi.org/10.3390/s19214802
APA StyleSchmidhammer, M., Gentner, C., Siebler, B., & Sand, S. (2019). Localization and Tracking of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. Sensors, 19(21), 4802. https://doi.org/10.3390/s19214802