A Survey of Practical Design Considerations of Optical Imaging Stabilization Systems for Small Unmanned Aerial Systems

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Vibration Sources and Effects
2.1.1. Vibration Sources in sUAS Platforms
Fixed-Wing Platforms
Rotary-Wing Platforms
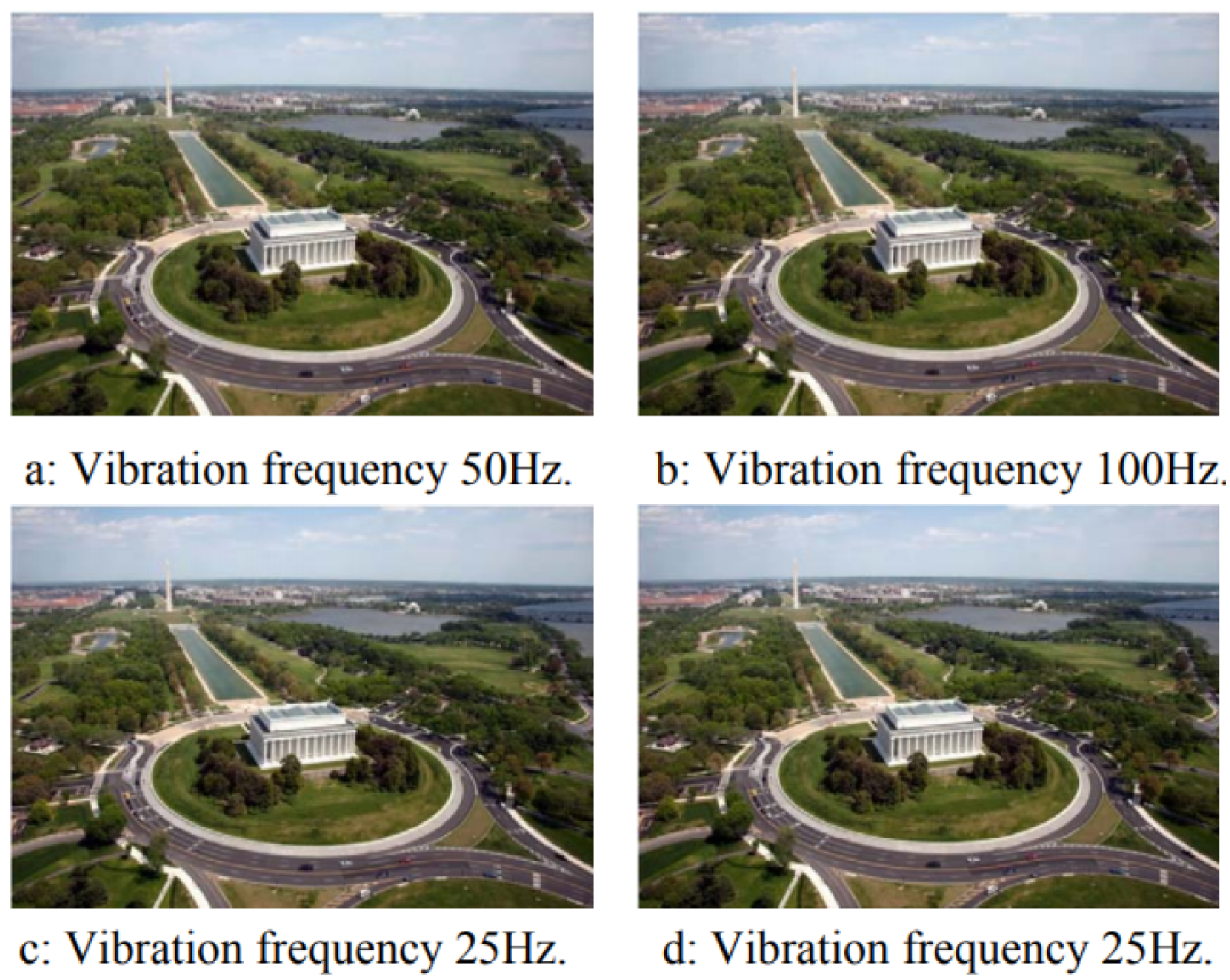
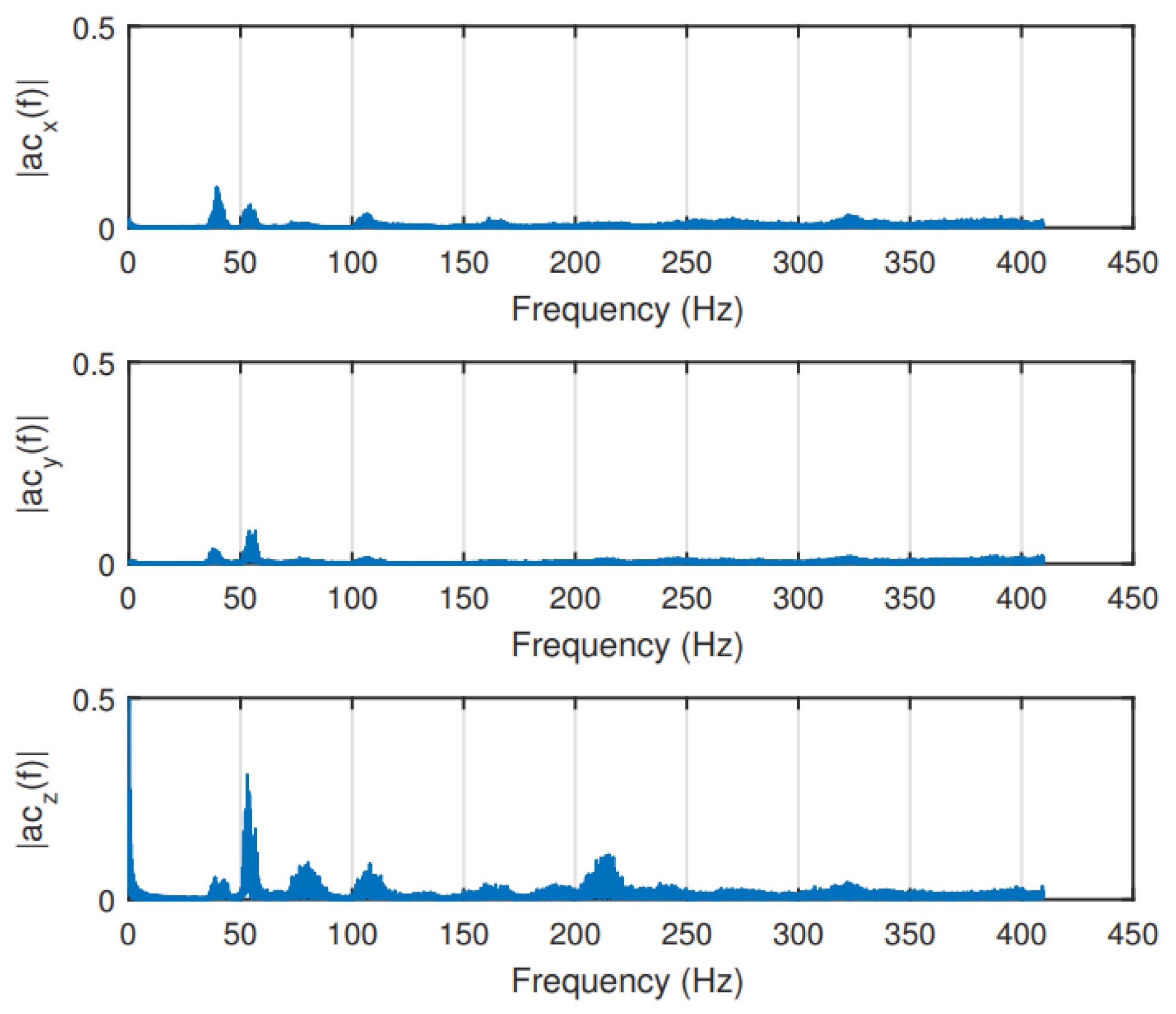
2.1.2. Vibration Effects on sUAS Image Quality
2.2. Mechanical Vibration Mitigation
2.2.1. Dampers on the Optical Imaging System
2.2.2. Other Mechanical Solutions
Flow-Induced Oscillations
2.3. Optical Image Stabilization
2.4. Software Image Stabilization
2.4.1. Digital Image Stabilization
2.4.2. Digital Video Stabilization
2.5. Gimbal Stabilization
2.5.1. Gimbal Systems Classification
2.5.2. Gimbal Systems Design Considerations
2.5.3. Stabilization
Drive System
Motion Sensors
2.6. Impact of the Stabilized Imaging System on sUAS Aerodynamics
2.6.1. Impact of Weight
2.6.2. Impact of Shape and Size
2.6.3. Impact of Shape and Size on Fixed-Wing Aircraft
- Form drag: The form drag is influenced by the shape of the object (Figure 13). Although the droplet shape offers the most favorable aerodynamic characteristics, when pointed straight into the direction of the moving air, it also offers challenges related to possible viewing angles of the camera system. Therefore, the aerodynamic considerations may be considered a performance parameter within the overall geometrical optimization of the camera system.
- Skin friction drag: As air moves over the surface of the body, close to the surface the flow will lose energy due to viscous effects. This type of drag is called skin friction drag. A turbulent boundary layer that is induced by a rougher surface may stay attached longer than a laminar boundary layer, thus reducing the form drag. This generally holds true for smaller object in relatively low air speeds [21]. Therefore, for smaller objects, the negative effects of higher skin friction drag, which is caused by a rougher surface, may potentially be offset by a lower overall profile drag. Finally, it should be noted that such potential benefits are highly dependent on the specific design and flow conditions, and therefore require an in-depth aerodynamic analysis. Projects where such analyses is not within reach may benefit from focusing on the form drag and interference drag instead.
- Interference drag: In the context of aerodynamics, the interference drag can be explained as the airflow over one object disturbing the airflow over another object unfavorably. The actual effects of interference drag depend to a large extent on the airspeed. Therefore, in the context of aircraft performance, it cannot be said that a closed and shielded system is necessarily superior to a system with exposed components as it may also be heavier. It is dependent on mission-specific parameters. The following section suggests methods to study the effects of on-board camera designs, including the interference drag characteristics.
Impact of Shape and Size on Rotary-Wing Aircraft
2.6.4. Impact of Position
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Eggleston, B.; McLuckie, B.; Koski, W.R.; Bird, D.; Patterson, C.; Bohdanov, D.; Liu, H.; Mathews, T.; Gamage, G. Development of the Brican TD100 Small UAS and Payload Trials. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 143–149. [Google Scholar] [CrossRef]
- Leira, F.S.; Trnka, K.; Fossen, T.I.; Johansen, T.A. A ligth-weight thermal camera payload with georeferencing capabilities for small fixed-wing UAVs. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 485–494. [Google Scholar]
- Leira, F.S.; Johansen, T.A.; Fossen, T.I. Automatic detection, classification and tracking of objects in the ocean surface from UAVs using a thermal camera. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- Chen, J.; Wu, J.; Chen, G.; Dong, W.; Sheng, X. Design and Development of a Multi-rotor Unmanned Aerial Vehicle System for Bridge Inspection. In Proceedings of the Intelligent Robotics and Applications: 9th International Conference (ICIRA 2016), Tokyo, Japan, 22–24 August 2016; pp. 498–510. [Google Scholar]
- Shahbazi, M.; Sohn, G.; Théau, J.; Menard, P. Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling. Sensors 2015, 15, 27493–27524. [Google Scholar] [CrossRef] [PubMed]
- Hilkert, J. Inertially stabilized platform technology Concepts and principles. IEEE Control Syst. Mag. 2008, 28, 26–46. [Google Scholar]
- Masten, M. Inertially stabilized platforms for optical imaging systems. IEEE Control Syst. Mag. 2008, 28, 47–64. [Google Scholar]
- Li, Z.; Yan, Y.; Jing, Y.; Zhao, S. The Design and Testing of a LiDAR Platform for a UAV for Heritage Mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 17. [Google Scholar] [CrossRef]
- Ma, H.; Wu, J. Analysis of positioning errors caused by platform vibration of airborne LiDAR system. In Proceedings of the 2012 8th IEEE International Symposium on Instrumentation and Control Technology (ISICT), London, UK, 11–13 July 2012; pp. 257–261. [Google Scholar]
- Uragun, B.; Tansel, I.N. The noise reduction techniques for unmanned air vehicles. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 800–807. [Google Scholar]
- Li, Z.; Lao, M.; Phang, S.K.; Hamid, M.R.A.; Tang, K.Z.; Lin, F. Development and Design Methodology of an Anti-Vibration System on Micro-UAVs. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition (IMAV), Toulouse, France, 18–22 September 2017. [Google Scholar]
- Verbeke, J.; Debruyne, S. Vibration analysis of a UAV multirotor frame. In Proceedings of the ISMA 2016 International Conference on Noise and Vibration Engineering, Leuven, Belgium, 19–21 September 2016; pp. 2401–2409. [Google Scholar]
- Li, C.; Tan, F. Effect of UAV Vibration on Imaging Quality of Binary Optical Elements. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1693–1698. [Google Scholar]
- Gurtner, A.; Walker, R.; Boles, W. Vibration compensation for fisheye lenses in UAV applications. In Proceedings of the 9th Biennial Conference of the Australian Pattern Recognition Society on Digital Image Computing Techniques and Applications, Glenelg, Australia, 3–5 December 2007; pp. 218–225. [Google Scholar]
- Gurtner, A.; Greer, D.G.; Glassock, R.; Mejias, L.; Walker, R.A.; Boles, W.W. Investigation of fish-eye lenses for small-UAV aerial photography. IEEE Trans. Geosci. Remote Sens. 2009, 47, 709–721. [Google Scholar] [CrossRef]
- Haghshenas, J. Effects of satellite platform’s vibrations on the image quality of a remote sensing payload: system level design and challenges. In Optical Systems Design 2015: Optical Design and Engineering VI; International Society for Optics and Photonics: Jena, Germany, 7–10 September 2015; Volume 9626, p. 96262P. [Google Scholar]
- Wulich, D.; Kopeika, N. Image resolution limits resulting from mechanical vibrations. Opt. Eng. 1987, 26, 266529. [Google Scholar] [CrossRef]
- Mizui, M.; Yamamoto, I.; Ohsawa, R. Effects of propeller-balance on sensors in small-scale unmanned aerial vehicle. IOSRJEN 2012, 2, 23–27. [Google Scholar] [CrossRef]
- Doty, M.J.; Fuller, C.R.; Schiller, N.H.; Turner, T.L. Active Noise Control of Radiated Noise from Jets; NASA, Langley Research Center: Hampton, VA, USA, 2013. [Google Scholar]
- Yechout, T. Introduction to Aircraft Flight Mechanics; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2014. [Google Scholar]
- Raymer, D. Aircraft Design: A Conceptual Approach 5e and RDSWin STUDENT; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2012. [Google Scholar]
- Yeom, D. Optical image stabilizer for digital photographing apparatus. IEEE Trans. Consum. Electron. 2009, 55, 1028–1031. [Google Scholar] [CrossRef]
- Li, T.H.S.; Chen, C.C.; Su, Y.T. Optical image stabilizing system using fuzzy sliding-mode controller for digital cameras. IEEE Trans. Consum. Electron. 2012, 58, 237–245. [Google Scholar] [CrossRef]
- Tico, M. Digital Image Stabilization. In Recent Advances in Signal Processing; IntechOpen Limited: London, UK, 2009; Chapter 1; pp. 1–14. [Google Scholar] [CrossRef]
- Reddy, K.; Lokesha, H.; Akhila, S. Video stabilization for micro air vehicles. Int. J. Adv. Res. Comput. Commun. Eng. 2015, 4, 442–445. [Google Scholar]
- Johansen, D.; Hall, J.; Beard, R.; Taylor, C. Stabilization of video from miniature air vehicles. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6862. [Google Scholar]
- Bosco, A.; Bruna, A.; Battiato, S.; Bella, G.; Puglisi, G. Digital Video Stabilization through Curve Warping Techniques. IEEE Trans. Consum. Electron. 2008, 54, 220–224. [Google Scholar] [CrossRef]
- Thillainayagi, R.; Kumar, K.S. Video stabilization technique for thermal infrared Aerial surveillance. In Proceedings of the 2016 Online International Conference on Green Engineering and Technologies (IC-GET), Coimbatore, India, 19 November 2016; pp. 1–6. [Google Scholar]
- Shen, H.; Pan, Q.; Cheng, Y.; Yu, Y. Fast video stabilization algorithm for UAV. In Proceedings of the IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; Volume 4, pp. 542–546. [Google Scholar] [CrossRef]
- Odelga, M.; Kochanek, N.; Bülthoff, H.H. Efficient real-time video stabilization for UAVs using only IMU data. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017; pp. 210–215. [Google Scholar] [CrossRef]
- Ryu, Y.G.; Roh, H.C.; Kim, S.J.; An, K.H.; Chung, M.J. Digital Image Stabilization for humanoid eyes inspired by human VOR system. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 2301–2306. [Google Scholar] [CrossRef]
- Albrektsen, S.; Johansen, T. User-Configurable Timing and Navigation for UAVs. Sensors 2018, 18, 2468. [Google Scholar] [CrossRef] [PubMed]
- Miller, R.; Mooty, G.; Hilkert, J.M. Gimbal system configurations and line-of-sight control techniques for small UAV applications. In Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications X; SPIE: Paris, France, 2013; Volume 8713. [Google Scholar] [CrossRef]
- Brake, N.J. Control System Development for Small UAV Gimbal. Master’s Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, 2012. [Google Scholar]
- Caratao, Z.D.; Gabel, K.F.; Arun, A.; Myers, B.; Swartzendruber, D.L.; Lum, C.W. MicaSense Aerial Pointing and Stabilization System: Dampening In-Flight Vibrations for Improved Agricultural Imaging. In Proceedings of the 2018 AIAA Information Systems-AIAA Infotech@ Aerospace, Kissimmee, FL, USA, 8–12 January 2018; p. 1239. [Google Scholar]
- Skjong, E.; Nundal, S. Tracking Objects with Fixed-Wing UAV Using Model Predictive Control and Machine Vision. Master’s Thesis, Norwegian University of Science and Technology (NTNU), Trondheim, Norway, 2014. [Google Scholar] [CrossRef]
- Kennedy, P.J.; Kennedy, R.L. Direct versus indirect line of sight (LOS) stabilization. IEEE Trans. Control Syst. Technol. 2003, 11, 3–15. [Google Scholar] [CrossRef]
- Hovenburg, A.R.; Johansen, T.A.; Storvold, R. Mission performance trade-offs of battery-powered suas. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 601–608. [Google Scholar]
- Leishman, G.J. Principles of Helicopter Aerodynamics; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]














© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dahlin Rodin, C.; de Alcantara Andrade, F.A.; Hovenburg, A.R.; Johansen, T.A. A Survey of Practical Design Considerations of Optical Imaging Stabilization Systems for Small Unmanned Aerial Systems. Sensors 2019, 19, 4800. https://doi.org/10.3390/s19214800
Dahlin Rodin C, de Alcantara Andrade FA, Hovenburg AR, Johansen TA. A Survey of Practical Design Considerations of Optical Imaging Stabilization Systems for Small Unmanned Aerial Systems. Sensors. 2019; 19(21):4800. https://doi.org/10.3390/s19214800
Chicago/Turabian StyleDahlin Rodin, Christopher, Fabio Augusto de Alcantara Andrade, Anthony Reinier Hovenburg, and Tor Arne Johansen. 2019. "A Survey of Practical Design Considerations of Optical Imaging Stabilization Systems for Small Unmanned Aerial Systems" Sensors 19, no. 21: 4800. https://doi.org/10.3390/s19214800
APA StyleDahlin Rodin, C., de Alcantara Andrade, F. A., Hovenburg, A. R., & Johansen, T. A. (2019). A Survey of Practical Design Considerations of Optical Imaging Stabilization Systems for Small Unmanned Aerial Systems. Sensors, 19(21), 4800. https://doi.org/10.3390/s19214800