A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring




Abstract
1. Introduction
- -
- offline versus online, which differentiates between the flight preparation phase or during the actual flight;
- -
- coverage versus waypoint passing: the former entails a discovery phase in which features like sensor position are estimated while the latter focuses on the interaction with the WSN;
- -
- static versus dynamic: is the path update carried out at runtime or not?
- -
- -
- -
- -
2. Materials and Methods
3. Collaborative Operation in UAV–WSN Applications
3.1. Collaboration and Intelligence in the UAV–WSN System
- -
- for node deployment [30] in applications with low on-site accessibility or dangerous for human operation;
- -
- as actuators, as in [37] where drones are used for spraying pesticides;
- -
- -
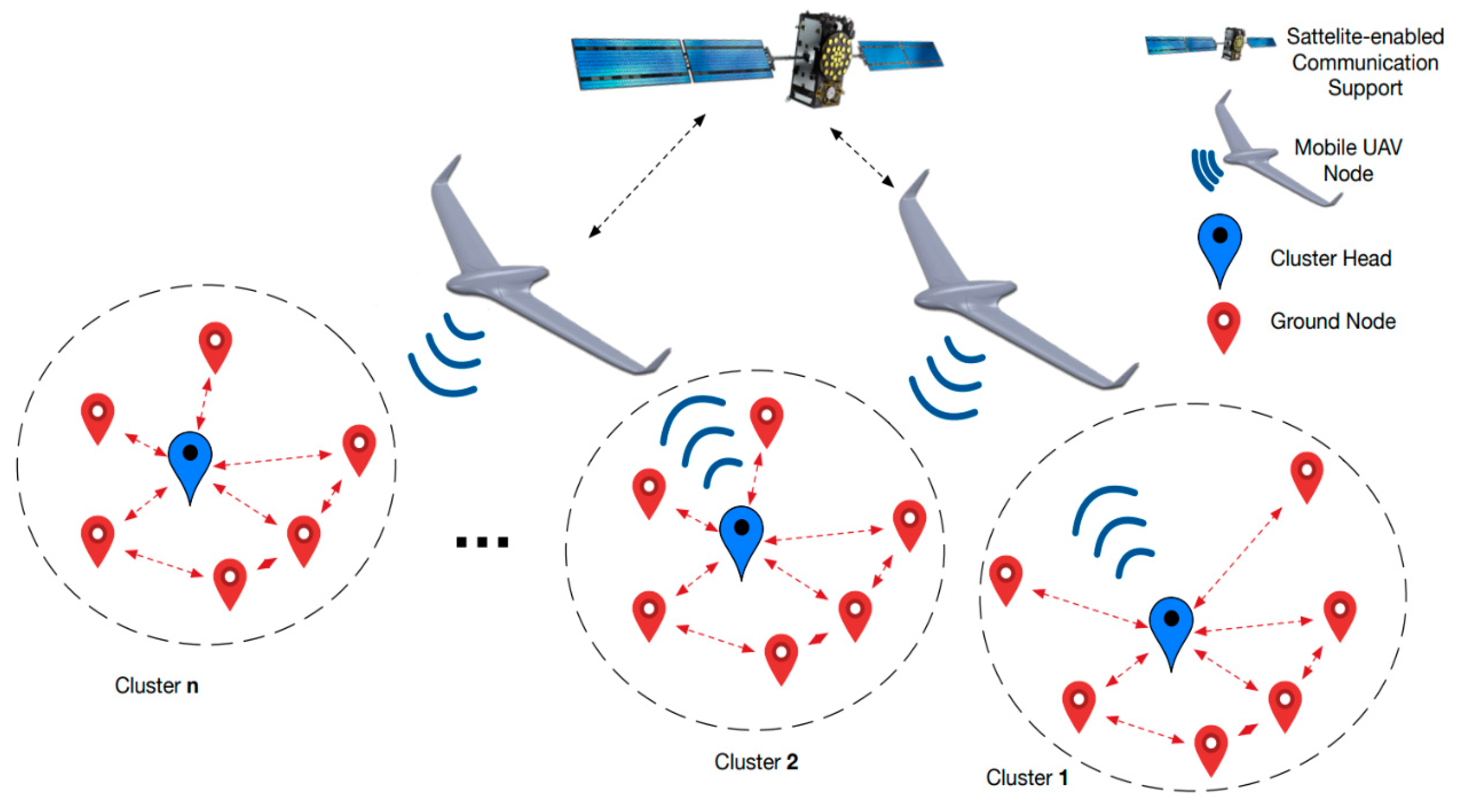
- as mobile sinks, this being the most widely used role integrated with either small or large scale WSNs. In this case, two data acquisition modes were identified:
- ○
- clustered, when data is sent to a local CH;
- ○
- direct communication, where the UAV collects data from each sensor node.
3.2. Satellite Information
3.3. UAV Path Generation and Tracking
3.3.1. Limitations in Path Generation and Tracking
3.3.2. Waypoint Selection, Ordering and Passing Through
- -
- -
- characteristics of the used UAV agent: available energy, type (rotary or fixed wing); type of antenna and speed;
- -
- characteristics of the environment: if there are obstacles or the application is in open field; the availability of ground base-stations along the entire path.
3.3.3. Computational Aspects
3.4. Data Acquisition
Data Mule Scenario for Data Acquisition
3.5. Data Processing
4. Data Communication
4.1. Requirements and Protocols
4.2. Standardisation and Safety Considerations
5. Integrated UAV–WSN System Implementation
6. Applications
6.1. Agriculture
- -
- Some areas might not have the proper amount of chemicals, while other might have a higher level;
- -
- The efficiency of the process is highly influenced by weather conditions;
- -
- The chemicals must be spread only inside a predefined boundary.
6.2. Environment
6.3. Disaster Management
6.4. Simulators for UAV–WSN Systems
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym/Symbol | Description | Acronym/Symbol | Description |
|---|---|---|---|
| ACO | Ant colony optimization | mUAV | Multiple unmanned aerial vehicles |
| AODV | Ad hoc on demand distance vector | NLoS | Non-line of sight |
| BSN | Body sensor network | NN | Nearest neighbor |
| CDR | Conflict detection and resolution | PCWAS | Priority-based contention window adjustment scheme |
| CH | Cluster head of WSN | POFS | Priority-based optimized frame collection |
| Csma/Ca | Carrier sense multiple access/collision avoidance | PSO | Particle swarm optimization |
| cUAV | Unmanned aerial vehicle—multi copter type | RRT* | Optimal rapidly exploring random trees |
| DS | Deterministic scanning—method for AC path planning | RRT | Rapidly exploring random trees |
| FPPWR | Fast path planning with rules | RSSI | Received signal strength indicator |
| FSRP | Frame selection-based routing protocol | SIG | Sensing information gathering |
| GA | Genetic algorithm | SN | Sensor node |
| GCS | Ground control station | STTT | Shortest travelling time trajectory |
| GDT | Ground data terminal | TDMA | Communication through time-division multiple access |
| GPS | Global positioning system | TSP | Travelling salesman problem |
| GPSR | Greedy perimeter stateless routing | TTM | Threshold time minimization routing protocol |
| GSM | Global system for mobile communications | UAV | Unmanned aerial vehicle |
| IoT | Internet of things | VSI | Value of sensor information |
| LLRA | Low-latency routing algorithm | WOS | Web of science |
| MI | Mixed integer | WSN | Wireless sensor network |
| MINLP | Mixed integer non-linear programming | wUAV | Unmanned aerial vehicle—fixed wing type |
References
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef]
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless Sensor Networks: A survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- García-Hernández, C.F.; Ibargüengoytia-González, P.H.; García-Hernández, J.; Pérez-Díaz, J.A. Wireless Sensor Networks and applications: A survey. IJCSNS Int. J. Comput. Sci. Netw. Secur. 2007, 7, 264–273. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S.A. Comprehensive survey on real-time applications of WSN. Future Int. 2017, 9, 77. [Google Scholar] [CrossRef]
- Djedouboum, A.C.; Ari, A.A.A.; Gueroui, A.M.; Mohamadou, A.; Aliouat, Z. Big data collection in large-scale Wireless Sensor Networks. Sensors 2018, 18, 4474. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles: A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Ronconi, G.B.A.; Batista, T.J.; Merola, V. The utilization of Unmanned Aerial Vehicles (UAV) for military action in foreign airspace. UFRGSMUN UFRGS Model United Nations J. 2014, 2, 137–180. [Google Scholar]
- Available online: http://www.easa.europa.eu (accessed on 12 May 2019).
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle based Wireless Sensor Network for marine-coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef]
- Ross, M.; Mills, M.; Toohey, D. Potential climate impact of black carbon emitted by rockets. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Cha, H.-J.; Yang, H.-K.; Song, Y.-J. A study on the design of Fog Computing architecture using sensor networks. Sensors 2018, 18, 3633. [Google Scholar] [CrossRef] [PubMed]
- Mujica, G.; Rodriguez-Zurrunero, R.; Wilby, M.R.; Portilla, J.; Rodríguez González, A.B.; Araujo, A.; Riesgo, T.; Vinagre Díaz, J.J. Edge and Fog Computing platform for data fusion of complex heterogeneous sensors. Sensors 2018, 18, 3630. [Google Scholar] [CrossRef] [PubMed]
- Mihai, V.; Dragana, C.; Stamatescu, G.; Popescu, D.; Ichim, L. Wireless Sensor Network architecture based on Fog Computing. In Proceedings of the 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 743–747. [Google Scholar]
- Mathur, P.; Nielsen, R.H.; Prasad, N.R.; Prasad, R. Data collection using miniature aerial vehicles in Wireless Sensor Networks. IET Wirel. Sens. Syst. 2016, 6, 17–25. [Google Scholar] [CrossRef]
- Wang, C.; Ma, F.; Yan, J.; De, D.; Das, S.K. Efficient aerial data collection with UAV in large-scale Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 286080. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Trajectory design for distributed estimation in UAV-enabled Wireless Sensor Network. IEEE Trans. Veh. Technol. 2018, 67, 10155–10159. [Google Scholar] [CrossRef]
- Yue, W.; Jiang, Z. Path planning for UAV to collect sensors data based on spiral decomposition. Procedia Comput. Sci. 2018, 131, 873–879. [Google Scholar] [CrossRef]
- Khan, T.F.; Kumar, D.S. Mobile collector aided energy reduced (MCER) data collection in agricultural wireless sensor networks. In Proceedings of the IEEE 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016; pp. 629–633. [Google Scholar]
- Xu, Y.; Xiao, L.; Yang, D.; Cuthbert, L.; Wang, Y. Energy-efficient UAV communication with multiple GTs based on trajectory optimization. Mob. Inf. Syst. 2018, 2018, 5629573. [Google Scholar] [CrossRef]
- Rault, T.; Bouabdallah, A.; Challal, Y. WSN lifetime optimization through controlled sink mobility and packet buffering. In Proceedings of the Global Information Infrastructure Symposium (GIIS), Trento, Italy, 28–31 October 2013; pp. 1–6. [Google Scholar]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.D.; Ribeiro, A.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, M.; Feng, Z.; Li, W.; Zhang, W.; Pan, M. IoT enabled UAV: Network architecture and routing algorithm. IEEE Int. Things J. 2019, 6, 3727–3742. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Jawad, H.; Nordin, R.; Gharghan, S.; Jawad, A.; Ismail, M. Energy-efficient wireless sensor networks for precision agriculture: A review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef] [PubMed]
- Martinez-de Dios, J.R.; Lferd, K.; de San Bernabé, A.; Nunez, G.; Torres-González, A.; Ollero, A. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J. Intell. Robot. Syst. 2013, 70, 491–508. [Google Scholar] [CrossRef]
- Roldan, J.J.; Lansac, B.; del Cerro, J.; Barrientos, A. A proposal of Multi-UAV mission coordination and control architecture. Adv. Intell. Syst. Comput. 2015, 417, 597–608. [Google Scholar]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as aerial sensor network for disaster management applications. E&i Elektrotechnikund Inf. 2010, 127, 56–63. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Corke, P.; Hrabarz, S.; Petersony, R.; Rusyx, D.; Saripalliz, S.; Sukhatmez, G. Autonomous deployment and repair of a sensor network using an Unmanned Aerial Vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), New Orleans, LA, USA, 26 April–1 May 2004; pp. 3602–3608. [Google Scholar]
- Hortos, S.W. Intelligent algorithms for persistent and pervasive sensing in systems comprised of wireless ad hoc networks of ground-based sensors and mobile infrastructures. In Proceedings of the SPIE, Intelligent Computing: Theory and Applications V, Orlando, FL, USA, 9–13 April 2007. [Google Scholar]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.-H.; Assi, C. UAV-aided projection-based compressive data gathering in wireless sensor networks. IEEE Int. Things J. 2019, 6, 1893–1905. [Google Scholar] [CrossRef]
- Pan, Q.; Wen, X.; Lu, Z.; Li, L.; Jing, W. Dynamic speed control of Unmanned Aerial Vehicles for data collection under Internet of Things. Sensors 2018, 18, 3951. [Google Scholar] [CrossRef]
- Uddin, M.A.; Mansour, A.; Le Jeune, D.; Aggoune, E.L.H.M. Agriculture internet of things: AG-IoT. In Proceedings of the 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, Australia, 22–24 November 2017; pp. 1–6. [Google Scholar]
- Mahmoud, S.; Jawhar, I.; Mohamed, N.; Wu, J. UAV and WSN softwarization and collaboration using cloud computing. In Proceedings of the 3rd Smart Cloud Networks and Systems (SCNS), Dubai, UAE, 19–21 December 2016; pp. 1–8. [Google Scholar]
- Sara, M.; Jawhar, I.; Nader, M. A softwarization architecture for UAVs and WSNs as Part of the cloud environment. In Proceedings of the IEEE International Conference on Cloud Engineering Workshops, (IC2EW), Berlin, Germany, 4–8 April 2016; pp. 13–18. [Google Scholar]
- Costa, F.; Ueyama, J.; Braun, T.; Pessin, G.; Osório, F.; Vargas, P. The use of Unmanned Aerial Vehicles and Wireless Sensor Networks in agricultural applications. In Proceedings of the IEEE International and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5045–5048. [Google Scholar]
- Fu, S.; Zhao, L.; Su, Z.; Jian, X. UAV based relay for Wireless Sensor Networks in 5G systems. Sensors 2018, 18, 2413. [Google Scholar] [CrossRef]
- Harounabadi, M.; Bocksberger, M.; Mitschele-Thiel, A. Study on network architectures for message ferry networks with multiple UAVs. In Proceedings of the 10th International Conference on Ubiquitous and Future Networks, Prague, Czech Republic, 3–6 July 2018; pp. 59–63. [Google Scholar]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. A Framework for Using Unmanned Aerial Vehicles for Data Collection in Linear Wireless Sensor Networks. J. Intell. Robotic Syst. 2014, 74, 437–453. [Google Scholar] [CrossRef]
- Sun, P.; Boukerche, A. Performance modeling and analysis of a UAV path planning and target detection in a UAV-based wireless sensor network. Comput. Netw. 2018, 146, 217–231. [Google Scholar] [CrossRef]
- Mohamed, N.; AlDhaheri, H.; Almurshidi, K.; Al-Hammoudi, M.; Al-Yalyali, S.; Jawhar, I.; Al-Jaroodi, J. Using UAVs to secure linear Wireless Sensor Networks. In Proceedings of the IEEE 2nd International Conference on Big Data Security on Cloud, IEEE International Conference on High Performance and Smart Computing, IEEE International Conference on Intelligent Data and Security, New York, NY, USA, 9–10 April 2016; pp. 424–429. [Google Scholar]
- Nikhitha, S.R.; Panda, M. Optimal sensor data harvesting using a mobile sink. Procedia Comput. Sci. 2018, 143, 921–930. [Google Scholar] [CrossRef]
- Arabi, S.; Sabir, E.; Elbiaze, H.; Sadik, M. Data gathering and energy transfer dilemma in UAV-assisted flying access network for IoT. Sensors 2018, 18, 1519. [Google Scholar] [CrossRef] [PubMed]
- Caballero, F.; Merino, L.; Maza, I.; Ollero, A. A particle filtering method for wireless sensor network localization with an aerial robot beacon. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 596–601. [Google Scholar]
- Cobano, J.A.; Alejo, D.; Heredia, G.; Martinez-de Dios, J.R.; Ollero, A. Efficient collision-free trajectory planning for WSN data collection with Unmanned Aerial Vehicles. IFAC Proc. Vol. 2013, 46, 220–225. [Google Scholar] [CrossRef]
- Martnez-de Dios, J.R.; de San Bernab, A.; Viguria, A.; Torres-Gonzlez, A.; Ollero, A. Combining unmanned aerial systems and sensor networks for earth observation. Remote Sens. 2017, 9, 336. [Google Scholar] [CrossRef]
- Fernandez, C.J.; Martinez-de-Dios, J.R.; Maza, I.; Ramon, F.F.; Ollero, A. Ten years of cooperation between mobile robots and Sensor Networks. Int. J. Adv. Robot. Syst. 2015, 12, 70. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Del Cerro, J.; Barrientos, A.; de Frutos, M. Near-optimal coverage trajectories for image mosaicing using a mini quad-rotor over irregular-shaped fields. Precis. Agric. 2013, 14, 115–132. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Yue, X.; Zhu, W. Cloud-assisted UAV data collection for multiple emerging events in distributed WSNs. Sensors 2017, 17, 1818. [Google Scholar] [CrossRef]
- Alighanbari, M.; Kuwata, Y.; How, J.P. Coordination and control of multiple UAVs with timing constraints and loitering. In Proceedings of the American Control Conference (ACC), Denver, CO, USA, 4–6 June 2003; pp. 5311–5316. [Google Scholar]
- Arvanitaki, A.; Pappas, N. Modeling of a UAV-based data collection system. In Proceedings of the 22nd International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Lund, Sweden, 19–21 June 2017; pp. 1–6. [Google Scholar]
- Neto, J.; Boukerche, A.; Yokoyama, R.; Guidoni, D.; Meneguette, R.; Ueyama, J.; Villas, A. Performance evaluation of unmanned aerial vehicles in automatic power meter readings. Ad Hoc Netw. 2017, 60, 11–25. [Google Scholar] [CrossRef]
- Dang, P.; Lewis, F.; Popa, D. Dynamic localization of air-ground Wireless Sensor Networks. Adv. Unmanned Aer. Veh. 2007, 33, 431–453. [Google Scholar]
- Ho, D.-T.; Grtli, E.I.; Sujit, P.T.; Johansen, A.; Sousa, J.B. Optimization of Wireless Sensor Network and UAV data acquisition. J. Intell. Robot. Syst. 2015, 78, 159–179. [Google Scholar] [CrossRef]
- Alejo, D.; Cobano, J.; Heredia, G.; de Dios, J.R.M.; Ollero, A. Efficient trajectory planning for WSN data collection with multiple UAVs. Coop. Robot. Sens. Netw. 2015, 604, 53–75. [Google Scholar]
- Stoican, F.; Prodan, I.; Popescu, D.; Ichim, L. Constrained trajectory generation for UAV systems using a B-spline parametrization. In Proceedings of the 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 613–618. [Google Scholar]
- Faial, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Yoo, S.; Park, J.; Kim, S.; Shrestha, A. Flying path optimization in UAV-assisted IoT sensor networks. ICT Express 2016, 2, 140–144. [Google Scholar] [CrossRef]
- Yang, Q.; Yoo, S. Optimal UAV path planning: Sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Klein, D.; Venkateswaran, S.; Isaacs, J.; Burman, J.; Pham, T.; Hespanha, J.; Madhow, U. Localization with sparse acoustic Sensor Network using UAVs as information seeking data mules. ACM Trans. Sens. Netw. 2013, 9, 30. [Google Scholar] [CrossRef]
- Liu, S.; Wei, Z.; Guo, X.; Yuan, X.; Feng, Z. Performance analysis of UAVs assisted data collection in Wireless Sensor Network. In Proceedings of the 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Rashed, S.; Soyturk, M. Analyzing the effects of UAV mobility patterns on data collection in Wireless Sensor Networks. Sensors 2017, 17, 413. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT framework views and challenges: Towards protecting drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef]
- Tazibt, C.Y.; Bekhti, M.; Djamah, T.; Achir, N.; Boussetta, K. Wireless sensor network clustering for UAV-based data gathering. In Proceedings of the 2017 Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 245–247. [Google Scholar]
- Gong, J.; Chang, T.; Shen, C.; Chen, X. Flight time minimization of UAV for data collection over Wireless Sensor Networks. IEEE J. Sel. Areas Commun. 2018, 36, 1942–1954. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Efficient data collection and tracking with flying drones. Ad Hoc Netw. 2019, 89, 35–46. [Google Scholar] [CrossRef]
- Liu, J.; Wu, S.; Chiu, K. Path planning of a data mule in wireless sensor network using an improved implementation of clustering-based genetic algorithm. In Proceedings of the IEEE Symposium on Computational Intelligence in Control and Automation (CICA), Singapore, 16–19 April 2013; pp. 30–37. [Google Scholar]
- Heimfarth, T.; de Araujo, J.P.; Giacomin, J.C. Unmanned Aerial Vehicle as data mule for connecting disjoint segments of wireless sensor network with unbalanced traffic. In Proceedings of the IEEE 17th International Symposium on Object/Component/Service-Oriented Real-Time Distributed Computing, Reno, NV, USA, 10–12 June 2014; pp. 246–252. [Google Scholar]
- Sayyed, A.; De Araújo, G.M.; Bodanese, J.P.; Becker, L.B. Dual-Stack Single-Radio communication architecture for UAV acting as a mobile node to collect data in WSNs. Sensors 2015, 15, 23376–23401. [Google Scholar] [CrossRef]
- Pourghebleh, B.; Navimipour, N.J. Data aggregation mechanisms in the Internet of Things. A systematic review of the literature and recommendations for future research. J. Netw. Comput. Appl. 2017, 97, 23–34. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Noura, H.; Mahmoud, S. UAVFog: A UAV-based Fog computing for Internet of Things. In Proceedings of the IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computed, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; pp. 1–8. [Google Scholar]
- Pinto, M.F.; Marcato, A.L.M.; Melo, A.G.; Honório, L.M.; Urdiales, C. A framework for analyzing Fog-Cloud Computing cooperation applied to information processing of UAVs. Wirel. Commun. Mob. Comput. 2019, 2019, 7497924. [Google Scholar] [CrossRef]
- Leung, C.K.; Braun, P.; Cuzzocrea, A. AI-based sensor information fusion for supporting deep supervised learning. Sensors 2019, 19, 1345. [Google Scholar] [CrossRef]
- Dragana, C.; Stamatescu, G.; Ichim, L.; Popescu, D. Interlinking Unmanned Aerial Vehicles with Wireless Sensor Networks for improved large area monitoring. In Proceedings of the 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 359–364. [Google Scholar]
- You, C.; Zhang, R. 3D trajectory optimization in rician fading for UAV-enabled data harvesting. IEEE Trans. Wirel. Commun. 2019, 18, 3192–3207. [Google Scholar] [CrossRef]
- Yomo, H.; Asada, A.; Miyatake, M. On-demand data gathering with a Drone-based mobile sink in Wireless Sensor Networks exploiting wake-up receivers. IEICE Trans. Commun. 2018, 101, 2094–2103. [Google Scholar] [CrossRef]
- Chen, C.; Chen, J.A.; Huang, Y.M. Intelligent environmental sensing with an Unmanned Aerial System in a Wireless Sensor Network. Int. J. Smart Sens. Intell. Syst. 2017, 10, 696–717. [Google Scholar] [CrossRef]
- Xu, J.; Solmaz, G.; Rahmatizadeh, R.; Turgut, D.; Boloni, L. Internet of Things applications: Animal monitoring with Unmanned Aerial Vehicle. arXiv 2016, arXiv:1610.05287. [Google Scholar]
- Vasisht, D.; Kapetanovic, Z.; Won, J.; Jin, X.; Chandra, R.; Kapoor, A.; Sinha, S.N.; Sudarshan, M.; Stratman, S. Farmbeats: An IoT platform for data-driven agriculture. In Proceedings of the 14th USENIX Conference on Networked Systems Design and Implementation (NSDI), Boston, MA, USA, 27–29 March 2017; pp. 515–528. [Google Scholar]
- Erman, A.T.; Van Hoesel, L.; Havinga, P. Enabling mobility in heterogenous Wireless Sensor Networks cooperating with UAVs for mission-critical management. IEEE Wirel. Commun. 2008, 15, 38–46. [Google Scholar] [CrossRef]
- Kuawattanaphan, R.; Champrasert, P.; Aramkul, S. A novel heterogeneous Wireless Sensor Node deployment algorithm with parameter-free configuration. IEEE Access 2018, 6, 44951–44969. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Raimondo, P.; Tropea, M.; De Rango, F.; Aiello, C. An IoT surveillance system based on a decentralised architecture. Sensors 2019, 19, 1469. [Google Scholar] [CrossRef]
- Dragana, C.; Stamatescu, G.; Mihai, V.; Popescu, D. An approach for weighted average consensus in event detection. In Proceedings of the 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1100–1105. [Google Scholar]
- Sharma, V.; Srinivasan, K.; Kumar, R.; Chao, H.-C.; Hua, K.-L. Efficient cooperative relaying in flying ad hoc networks using fuzzy-bee colony optimization. J Supercomput. 2017, 73, 3229–3259. [Google Scholar] [CrossRef]
- Global Drone Regulations Database. 2017. Available online: https://droneregulations.info/index.html (accessed on 27 March 2018).
- Custers, B. The Future of Drone Use—Opportunities and Threats from Ethical and Legal Perspectives, 1st ed.; T.M.C. Asser Press: The Hague, The Netherlands, 2016. [Google Scholar]
- Safe Operations of Drones in Europe. On Air, Issue 20: Safe Operations of Drones in Europe. Available online: https://www.easa.europa.eu/newsroom-and-events/news/safe-operations-drones-europe (accessed on 12 May 2019).
- Militaru, G.; Popescu, D.; Ichim, L. UAV-to-UAV communication options for civilian applications. In Proceedings of the 26th Telecommunications forum TELFOR 2018, Belgrade, Serbia, 20–21 November 2018. [Google Scholar]
- Li, B.; Jiang, Y.; Sun, J.; Cai, L.; Wen, C.-Y. Development and testing of a two-UAV communication relay system. Sensors 2016, 16, 1696. [Google Scholar] [CrossRef]
- Baseca, C.C.; Díaz, J.R.; Lloret, J. Communication Ad Hoc Protocol for Intelligent Video Sensing Using AR Drones. In Proceedings of the 2013 IEEE 9th International Conference on Mobile Ad-hoc and Sensor Networks, Dalian, China, 11–13 December 2013; pp. 449–453. [Google Scholar]
- Cambra, C.; Díaz, J.R.; Lloret, J. Deployment and Performance Study of an Ad Hoc Network Protocol for Intelligent Video Sensing in Precision Agriculture. In Ad-hoc Networks and Wireless, ADHOC-NOW 2014, Lecture Notes in Computer Science; Garcia Pineda, M., Lloret, J., Papavassiliou, S., Ruehrup, S., Westphall, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8629. [Google Scholar]
- Cambra, C.; Sendra, S.; Lloret, J.; Parra Boronat, L. Ad hoc network for emergency rescue system based on unmanned aerial vehicles. Netw. Protoc. Algorithms 2015, 7, 72–89. [Google Scholar] [CrossRef]
- Cao, H.-R.; Yang, Z.; Li, Y.-Q. A mobile WSN sink node using Unmanned Aerial Vehicles: Design and experiment. Int. J. Netw. Mob. Technol. 2016, 10, 64–67. [Google Scholar] [CrossRef]
- Zolich, A.; Alfredsen, J.A.; Johansen, T.A. A communication bridge between underwater sensors and Unmanned Vehicles using a surface Wireless Sensor Network—Design and validation. In Proceedings of the OCEAN, Shanghai, China, 10–13 April 2016; pp. 1–9. [Google Scholar]
- Barbatei, R.; Skavhaug, A.; Johansen, T.A. Acquisition and relaying of data from a floating wireless sensor node using an Unmanned Aerial Vehicle. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 677–686. [Google Scholar]
- Komarov, M.; Moltchanov, D. System design and analysis of UAV-assisted BLE Wireless Sensor Systems. In Wired/Wireless Internet Communications; Springer: Cham, Switzerland, 2016; Volume 9674, pp. 284–296. [Google Scholar]
- Zhang, Y.; Chen, D.; Wang, S.; Tian, L. A promising trend for field information collection: An air-ground multi-sensor monitoring system. Inf. Process. Agric. 2018, 5, 224–233. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-based data gathering framework in UAV-assisted Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J. UAV-based data communication in Wireless Sensor Networks: Models and strategies. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 687–694. [Google Scholar]
- Sharma, V.; You, I.; Kumar, R. Energy efficient data dissemination in Multi-UAV coordinated Wireless Sensor Networks. Mob. Inf. Syst. 2016, 2016, 8475820. [Google Scholar] [CrossRef]
- Goudarzi, S.; Kama, N.; Anisi, M.H.; Zeadally, S.; Mumtaz, S. Data collection using Unmanned Aerial Vehicles for Internet of Things platforms. Comput. Electr. Eng. 2019, 75, 1–15. [Google Scholar] [CrossRef]
- Bounceur, A.; Marc, O.; Lounis, M.; Soler, J.; Clavier, L.; Combeau, P.; Vauzelle, R.; Lagadec, L.; Euler, R.; Bezoui, M.; et al. CupCarbon-Lab: An IoT emulator. In Proceedings of the 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–2. [Google Scholar]
- Perez-Hernandez, M.; Alturki, B.; Reiff-Marganiec, S. FABIoT: A flexible agent-based simulation model for IoT environments. In Proceedings of the IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Halifax, NS, Canada, 30 July–3 August 2018; pp. 1–8. [Google Scholar]
- Liu, S.; Wang, K.; Liu, K.; Chen, W. Noncoherent decision fusion over fading hybrid MACs in Wireless Sensor Networks. Sensors 2019, 19, 120. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Zhang, Z.; Li, C.; Huang, Y.; Yang, L. Power-efficient communication in UAV-aided Wireless Sensor Networks. IEEE Commun. Lett. 2018, 22, 1264–1267. [Google Scholar] [CrossRef]
- Modares, J.; Mastronarde, N.; Dantu, K. Simulating Unmanned Aerial Vehicle swarms with the UB-ANC emulator. Int. J. Micro Air Veh. 2019, 11, 1–16. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Matesea, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high resolution Unmanned Aerial Vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87. [Google Scholar] [CrossRef]
- Primicerio, J.; Matese, A.; Gennaro, S.D.; Albanese, L.; Guidoni, S.; Gay, P. Development of an integrated, low-cost and opensource system for precision viticulture: From UAV to WSN. In Proceedings of the EFITA-WCCA-CIGR Conference Sustainable Agriculture through ICT Innovation, Torino, Italy, 23–27 June 2013; pp. 1–6. [Google Scholar]
- Bo, Z.; Xiwen, L.; Yubin, L.; Zhihong, H.; Ming, Z.; Jiyu, L. Agricultural environment monitor system based on UAV and wireless sensor networks. Trans. Chin. Soc. Agric. Eng. 2015, 31, 176–182. [Google Scholar]
- Evangelatos, O.; Rolim, J.D.P. AIRWISE—An airborne Wireless Sensor Network for ambient air pollution monitoring. In Proceedings of the 4th International Conference on Sensor Networks (SENSORNETS), Angers, France, 11–13 February 2015; pp. 231–239. [Google Scholar]
- Xu, J.; Solmaz, G.; Rahmatizadeh, R.; Turgut, D.; Boloni, L. Animal monitoring with unmanned aerial vehicle-aided wireless sensor networks. In Proceedings of the 40th Annual IEEE Conference on Local Computer Networks (LCN), Clearwater Beach, FL, USA, 26–29 October 2015; pp. 125–132. [Google Scholar]
- Kureshi, I.; Theodoropoulos, G.; Mangina, E.; O’Hare, G.; Roche, J. Towards an info-symbiotic decision support system for disaster risk management. In Proceedings of the 19th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Chengdu, China, 14–16 October 2015; pp. 85–91. [Google Scholar]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Morgenthaler, S.; Braun, T.; Zhao, Z.; Staub, T.; Anwander, M. UAVNet: A mobile wireless mesh network using Unmanned Aerial Vehicles. In Proceedings of the IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1603–1608. [Google Scholar]
- Mori, A.; Okada, H.; Kobayashi, K.; Katayama, M.; Mase, K. Construction of a node-combined wireless network for large-scale disasters. In Proceedings of the 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 219–224. [Google Scholar]
- Mosterman, P.J.; Sanabria, D.E.; Bilgin, E.; Zhang, K.; Zander, J. A heterogeneous fleet of vehicles for automated humanitarian missions. Comput. Sci. Eng. 2014, 16, 90–95. [Google Scholar] [CrossRef]
- Ueyama, J.; Freitas, H.; Faical, B.S.; Filho, G.P.R.; Fini, P.; Pessin, G.; Gomes, P.H.; Villas, L.A. Exploiting the use of unmanned aerial vehicles to provide resilience in wireless sensor networks. IEEE Commun. Mag. 2014, 52, 81–87. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Pau, G.; Collotta, M.; Lim, J.; Kim, J. LoRaWAN-based energy-efficient surveillance by drones for intelligent transportation systems. Energies 2018, 11, 573. [Google Scholar] [CrossRef]
- Neri, M.; Surffritti, R.; Grimaccia, F.; Sinogas, P.; Guye, O.; Papin, C.; Michalareas, T.; Gazdag, L.; Rakkolainen, I. Skymedia—UAV-Based Capturing of HD/3D content with WSN augmentation for immersive media experiences. In Proceedings of the IEEE International Conference on Multimedia and Expo, Barcelona, Spain, 11–15 July 2011; pp. 1–6. [Google Scholar]
- Polo, J.; Hornero, G.; Duijneveld, C.; García, A.; Casas, O. Design of a low-cost Wireless Sensor Network with UAV mobile node for agricultural applications. Comput. Electron. Agric. 2015, 119, 19–32. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In the Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; pp. 1–6. [Google Scholar]
- Ito, F.S.C.; Filho, L.C.Q.; Inoue, R.S.; Branco, K.R. Cooperative UAV formation control simulated in X-plane. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1522–1529. [Google Scholar]
- Osterlind, F.; Dunkels, A.; Eriksson, N.; Finne, J.; Voigt, T. Cross-level sensor network simulation with COOJA. In Proceedings of the 31st IEEE Conference on Local Computer Networks, Tampa, FL, USA, 14–16 November 2006; pp. 641–648. [Google Scholar]






| Constraints and Costs | Method | Application | Miscellaneous | Reference |
|---|---|---|---|---|
| path length | GA | crop monitoring | cUAV, experimental results | [22] |
| WSN-based path update, communication radius, energy consumption | TSP | pesticide spraying, crop monitoring | cUAV, multi-pass, grid sensor deployment, experimental results | [19,24,25] |
| harsh-undulating terrain, communication radius, energy consumption | MINLP, TSP, FPPWR | data gathering | cUAV, forward and axial flight | [15,16] |
| path length, communication radius, energy consumption | greedy algorithm | data gathering | cUAV, experimental results | [50] |
| NA | Particle filtering, Bayesian analysis | data gathering | cUAV, node localization based on RSSI value, experimental testing | [45] |
| travel time, energy consumption | PSO, LEACH-C | data gathering | online CH selection | [55] |
| path length, energy consumption, communication range | heuristic methods, greedy algorithm | data gathering | spiral, zig-zag, strip-based paths | [17,18] |
| obstacle avoidance | MINLP, GA | area coverage, photogrammetry | mUAV, sensor placement | [28] |
| static/mobile obstacle avoidance | RRT, RRT*, GA | data gathering | mUAV, wUAV, experimental results | [46,56] |
| NA | heuristic algorithms, TSP | target tracking, area coverage | mUAV, experimental results | [48] |
| sensor lifetime | linear programming | data gathering | limited sensor buffer capacity | [21] |
| path length, travel time | heuristic methods | sensor node localization, data gathering | wUAV, multi-pass, experimental results, zig-zag path, sensor deployment | [47] |
| communication radius, path length, energy consumption | MINLP | data gathering | wUAV, multiple GDTs | [20] |
| obstacle avoidance, communication radius, path length, CH selection and estimation | MINLP, heuristic methods | precision agriculture | wUAV, B-spline parametrization | [1,57] |
| path length, area coverage | GA, PSO, Simulated Annealing, Hill-Climbing | pesticide spraying | experimental results | [49,58] |
| energy consumption, collision avoidance | MINLP, GA, RSCA, Set Cover Problem | data gathering | mUAV, TDMA, cyclic path | [59] |
| multiobjective utility function; prohibited, flying and sensing cells | GA, A* algorithm | data gathering over large areas | heterogeneous IoT devices | [60,61] |
| UAV payload and control restrictions | TTM | data gathering from sparse networks | experimental results, acoustic signals | [62] |
| path time, energy consumption | TSP, STTT | data gathering, recharging of depleted IoT devices | IoT devices | [44] |
| Data Acquisition Mode | Data Processing Characteristics | Optimization/Intelligence | Implementation/Description | Reference |
|---|---|---|---|---|
| UAV as relay between disconnected WSN nodes | Local processing, Fog computing | Universal Plug and Play node discovery; services-based approach | Large scale IoT applications | [73] |
| WSN–UAV–Cloud | Fog computing | Area coverage | Distributed WSN | [50,74] |
| UAV as mobile sink | Local processing at UAV level | Increasing reliability, maximizing data collection | cUAV—multiple WSN, path model; UAV—ground Rician fading channel model; data collection model | [77] |
| WSN–UAV; UAV as mobile sink; WSN nodes with wake-up receivers | UAV local processing | A calibration step used for path planning, a probability map for data collection is built | Small scale WSN | [78,79] |
| WSN–UAV; WSN with both normal and GPS sensors; UAV as mobile sink | Node localization, grid division and path planning at base station UAV local processing | Aerial node deployment Node localization Flying path optimization | Large scale WSN | [16,18] |
| WSN–multiple wUAV UAV as mobile sink | UAV local processing | Path planning, CDR (Conflict Detection and Resolution) | Multiple small scale WSN; Matlab simulations for trajectory; Real experiments using Megastar wUAV | [46] |
| UAV as relay between cluster head and GCS | Only messaging for data acquisition is considered at WSN and UAV | Energy consumption optimization | Mathematic simulations evaluating the effect of distance between cluster head and base station | [38] |
| UAV as relay between WSN cluster heads | Only messaging for data communication is considered at WSN and UAV | Method for choosing the cluster head and routing protocol | Sparse WSNs with unbalanced traffic | [64] |
| UAV as relay between WSN cluster heads | Only messaging for data communication is considered at WSN and UAV | Maximize area coverage | Sparse WSNs | [26] |
| Multiple UAVs as relays between WSN cluster heads | Path computing at UAV level | Different messaging architectures Minimization of the sum of all distances | Sparse WSNs; Mathematical simulations evaluating different architectures and path planning methods | [39] |
| UAV as relay between WSN cluster heads and sink nodes | Only messaging for data communication is considered at WSN and UAV | Reduce the consumption in data transmission; framework for monitoring linear infrastructure | Linear (deployed) sensor network with sink at the end line. | [40] |
| Multiple UAVs as relays between WSN nodes | Only messaging for data communication is considered at WSN and UAV | UAV positioning | Multiple faults in linear WSN | [42] |
| Multiple UAVs as mobile nodes | UAV route processing | Randomly selected routes Full area coverage | Mathematical analysis of the area coverage with the proposed algorithm | [41] |
| Multiple UAV- WSN; UAV as mobile sink | Data aggregation | Path planning UAV energy optimization | Large area WSN with scattered nodes; OmNET++Simulator | [59] |
| WSN–UAV–IoT | Data aggregation; Animal movement prediction; UAV route processing | Path planning defined by external factors | Large area WSN; Simulations using Zebranet dataset | [80] |
| Data aggregation UAV route processing | Path design to four functions: sensing, energy, time, and risk | Large area WSN | [60] | |
| Local processing, cloud computing | Energy consumption | Farm beats gateway for data collection from WSN, UAV; Azure Cloud | [81] | |
| UAV for WSN node localization | UAV route processing | Node position estimation Path planning | Large scale WSN; Mica2 Crossbow as WSN nodes | [45] |
| UAV for WSN node deployment | Messaging for status communication is considered at WSN and UAV | Node deployment reliability | AVATAR Autonomous helicopter; Mica Motes for WSN nodes | [30] |
| WSN–UAV–BSN | Messaging for status and data communication | Latency, reliability, network dynamics | OmNET++Simulator | [82] |
| Data Communication Type | Standards (Implementation) | Details | Reference |
|---|---|---|---|
| WSN–mUAV–fog | GSM, UMTS, HSPA | Standards are evaluated considering a bandwidth for sending video data from 1000 Kbps to 6000 Kbps | [73] |
| wUAV–WSN (CHs) | ZigBee | Distance between UAV and WSN below 100 m for communication | [95] |
| UAV–WSN UAV as mobile sink | ZigBee | Nodes in stand-by mode; WSN nodes with wake-up receivers; Point-to-point wake-up | [79] |
| UAV–IoT | IEEE 802.11 (WiFi) For wide areas: LoRaWAN, LTE, LTE-A, IEEE 802.16 (WiMAX) | Data collection and energy harvesting | [44] |
| UAV–WSN | LoRa | Distance between UAV and WSN 4 km | [10] |
| UAV–WSN | TinyMesh | Distance between UAV and WSN 485 m | [96] |
| UAV–WSN | RF | Distance between UAV and WSN 1–2 km | [97] |
| UAV–WSN | RF@902-928 MHz | 200 m in NLoS conditions | [62] |
| UAV–WSN | RF@900 MHz | UAV broadcasts wake-up messages every 1 s. UAV speed and ground distance not available | [45] |
| UAV–WSN | RF@916 MHz | Maximum air-ground distance 13 m, median range 9 m | [30] |
| UAV–WSN (single hop) | BLE | Nodes wake up each 10 s Distance between 10 m and 20 m | [98] |
| cUAV–mWSN | CSMA/ CD/ IEEE 802.15.4 | Nodes in stand-by mode, wake up for sensing or for UAV data transmission, distance between 10 m and 30 m | [22] |
| cUAV–WSN | IEEE 802.15.4g for data communications (920 MHz) IEEE 802.11n@5GHz for UAV ground control | Different wake-up mechanisms: broadcast and unicast, nodes in stand-by mode, a wake-up receiver installed at WSN nodes | [78] |
| UAV–WSN | IEEE 802.15.4 for data acquisition from WSN, 6LoWPAN for data sinking | Dual stack single radio architecture, algorithm for improving data transmission reliability | [71] |
| UAV–UAV | UHF band (400 MHz) | Direct communication, in near line of sight or in non-line of sight conditions | [90] |
| cUAV–cUAV | OLSR dynamic protocol, Ad-hoc Wi-Fi infrastructure | One UAV serves as a relay between another UAV and GCS | [92] |
| cUAV–cUAV | RTSP and RTP protocols | Video processing pipeline and control, quad copter AR Drone | [93] |
| cUAV–GCS–cUAV | 4G/LTE, DR 915 MHz Radio Telemetry (UAV-GCS), IEEE 802.3 32-bit CRC polynomial | Indirect communication, connectivity for low altitude UAV through a terrestrial 4G/LTE network | [91] |
| System Architecture | System Configuration | System Implementation | Reference |
|---|---|---|---|
| UAV–WSN | cUAV, wUAV—single WSN | Quadrotor | [22] |
| Miniature UAV—single WSN | Hero 6 UAV, Mica2 WSN nodes | [45] | |
| UAV for WSN node deployment | AVATAR helicopter, Mica Mote WSN nodes | [30] | |
| cUAV–WSN | Different simulators: OmNET++, Glomosim, SSFNet, ns2, Java-Sim | [24] | |
| wUAV–WSN | Fury UAV | [62] | |
| mUAV with specific functions: mobile sink, node deployment | OmNET++ simulations | [82] | |
| Multiple wUAV–WSN | Simulations using Matlab and C++, real evaluation using Megastar wUAV | [46,56] | |
| wUAV–WSN | Matlab simulation | [100] | |
| wUAV–WSN (single hop) | DUNE software to communicate with X8 UAV Pandaboard at UAV level ATXMEGA192C3 for sensor node | [97] | |
| wUAV–WSN (single hop) | PIC24F PCB as sensor node BeagleBone Black (BBB) board as beacon node, buoy, Delta wUAV | [10] | |
| wUAV–WSN (single hop) | Silicon Labs EFM32 Gecko microcontroller as WSN node, TBR-700 receiver and X8 UAV for field tests, Phantom quadrocopter for off-shore tests | [96] | |
| cUAV–WSN | DJI Phantom 4 UAV, embedded controller for WSN nodes, PC with an Android terminal for ground control | [78] | |
| UAV–WSN–IoT | mUAV–WSN | OmNET++Simulator | [108] |
| cUAV | Simulations using Arduino boards for both WSN and UAV | [73] | |
| cUAV–WSN | Arduino, Particle Photon or NodeMCU boards at sensor level, embedded Farmbeats gateway at UAV level, DJI Phantom 2, Phantom 3 and Inspire UAVs, Raspberry Pi at base station, Azure Cloud | [81] |
| Application Domain | Application Details | Implementation Characteristics | Reference |
|---|---|---|---|
| Agriculture | Data driven, IoT base station, prediction models | Farm beats gateway for data collection from WSN, UAV Azure Cloud | [81] |
| Crop monitoring in vineyards | Quadrotor | [22] | |
| Pesticide spraying | Simulations with OMNeT++ and MiXiM | [24,37,58] | |
| Precision agriculture | cUAV, multi-pass, grid sensor deployment, experimental results | [25] | |
| Crop and soil monitoring in vineyards integrating environmental data with multispectral images | mUAV WSN node: Arduino | [23,109,110] | |
| Farmland environmental monitoring | WSN sensor and relay nodes Octocopter | [111] | |
| Environment monitoring | Underwater monitoring | Simulations using Arduino boards | [73] |
| Ambient air pollution monitoring | Quadrocopter | [112] | |
| Ambient monitoring: temperature, humidity, light intensity, wind speed | Fixed-wing UAV | [90] | |
| Marine environment monitoring | PIC24F PCB/ ATXMEGA192C3 as sensor node, BeagleBone Black (BBB) board as beacon node, buoy, Delta mUAV | [10,96,97] | |
| Animal monitoring | Endangered species movement monitoring without any attached devices | Simulations using Zebranet dataset | [80,113] |
| Disaster monitoring/ emergency | Situational awareness, pre-event and post-event activity functions, integration with BSN | OmNET++ Simulator | [82] |
| Disaster monitoring, situational awareness, pre-event and post-event activity functions | Framework model | [114] | |
| Natural disaster management | Evaluation of different implementation solutions | [115] | |
| Disaster recovery, post-event functions | Quadrocopter | [116] | |
| Situational awareness, post-event activity functions | Numerical simulations of communication cases | [117] | |
| Disaster monitoring, situational awareness | Framework architecture | [118] | |
| Flood monitoring, post-event functions | Quadrocopter | [119] | |
| Transport monitoring | Ground pipeline monitoring and control | Simulations using Arduino boards | [73] |
| Energy-efficient urban surveillance, Intelligent transportation system | Multicopters in LoRaWAN-like networks | [120] | |
| Utilities | Power meter reading | Sinalgo Simulator, scenarios with up to 16,000 nodes | [53] |
| Multimedia | Capturing HD/3D content with augmented reality | Platform description | [121] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring. Sensors 2019, 19, 4690. https://doi.org/10.3390/s19214690
Popescu D, Stoican F, Stamatescu G, Chenaru O, Ichim L. A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring. Sensors. 2019; 19(21):4690. https://doi.org/10.3390/s19214690
Chicago/Turabian StylePopescu, Dan, Florin Stoican, Grigore Stamatescu, Oana Chenaru, and Loretta Ichim. 2019. "A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring" Sensors 19, no. 21: 4690. https://doi.org/10.3390/s19214690
APA StylePopescu, D., Stoican, F., Stamatescu, G., Chenaru, O., & Ichim, L. (2019). A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring. Sensors, 19(21), 4690. https://doi.org/10.3390/s19214690