Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image




Abstract
:1. Introduction
- Ekinox determining roll & pitch with RMS = 0.05° (RTK outage–30 s),
- Apogee determining roll & pitch z RMS = 0.012° (RTK outage–60 s),
- Horizon determining roll & pitch z RMS = 0.01° (RTK outage–60 s).
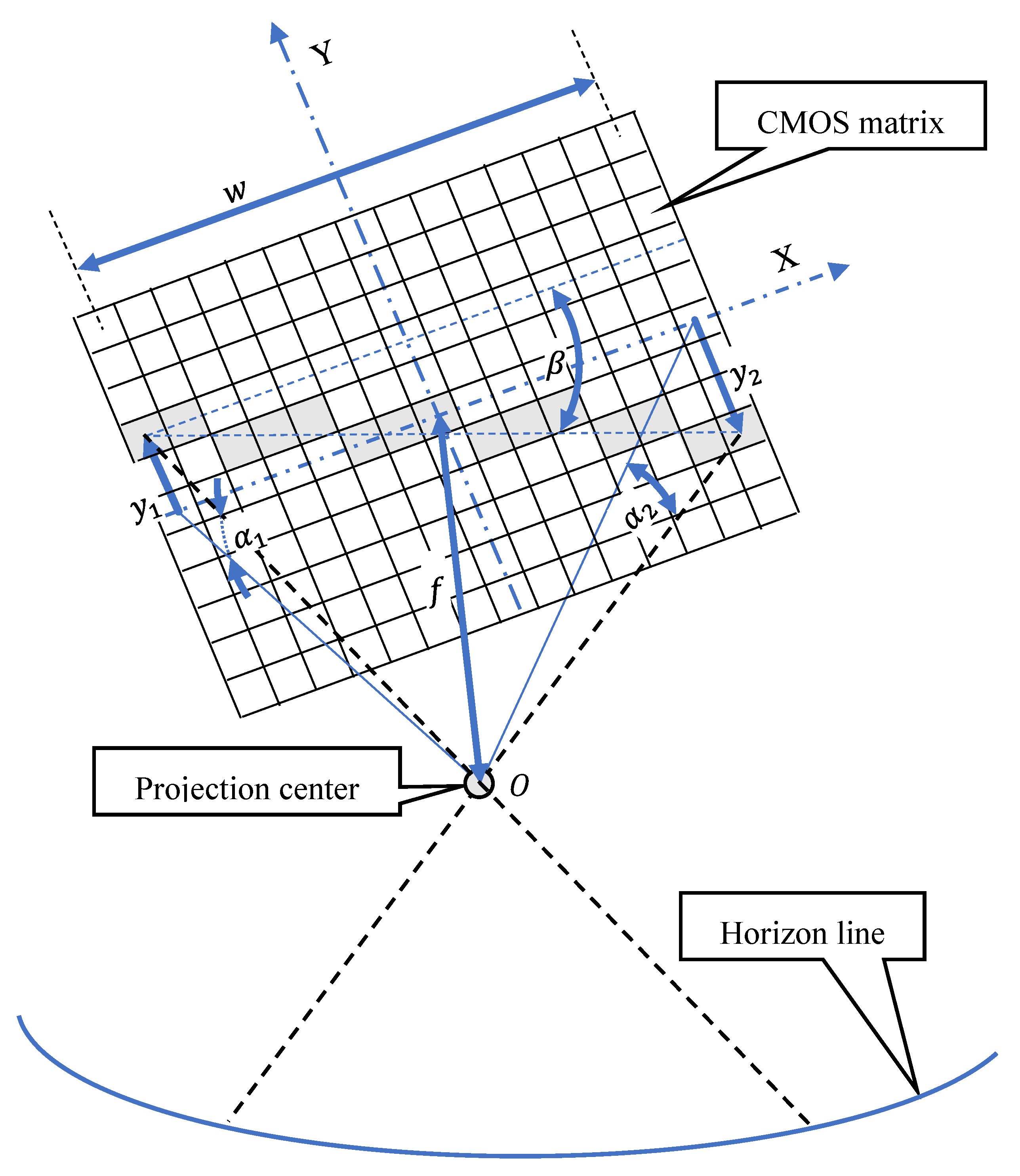
2. Methods
- —mean error of focal length measurement,
- —mean error of CMOS matrix width measurement,
- —mean error of angles i measurements on CMOS matrix.
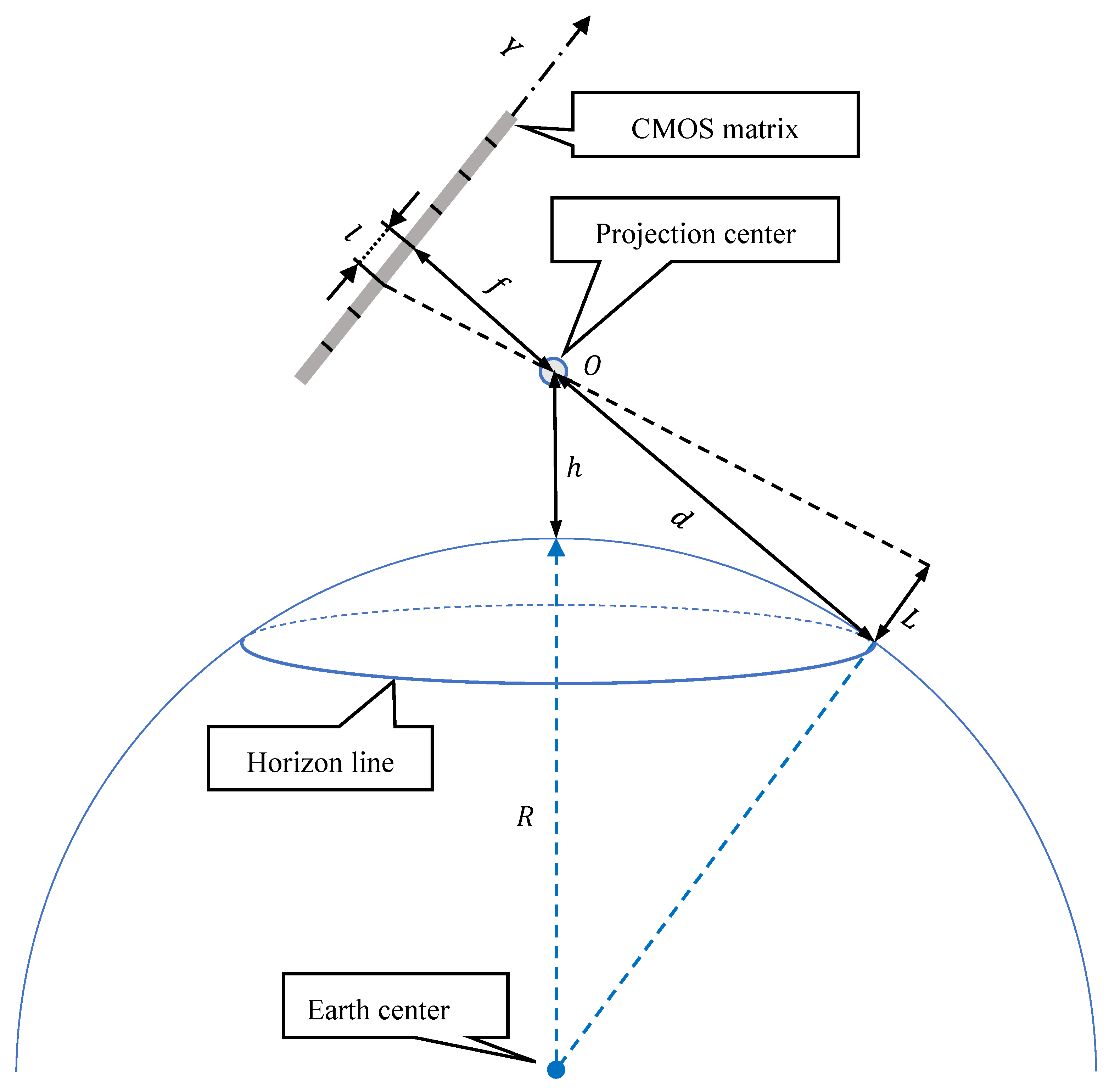
- —pixel size (calculated as the ratio of matrix height in units of length to matrix height in pixels),
- —focal length,
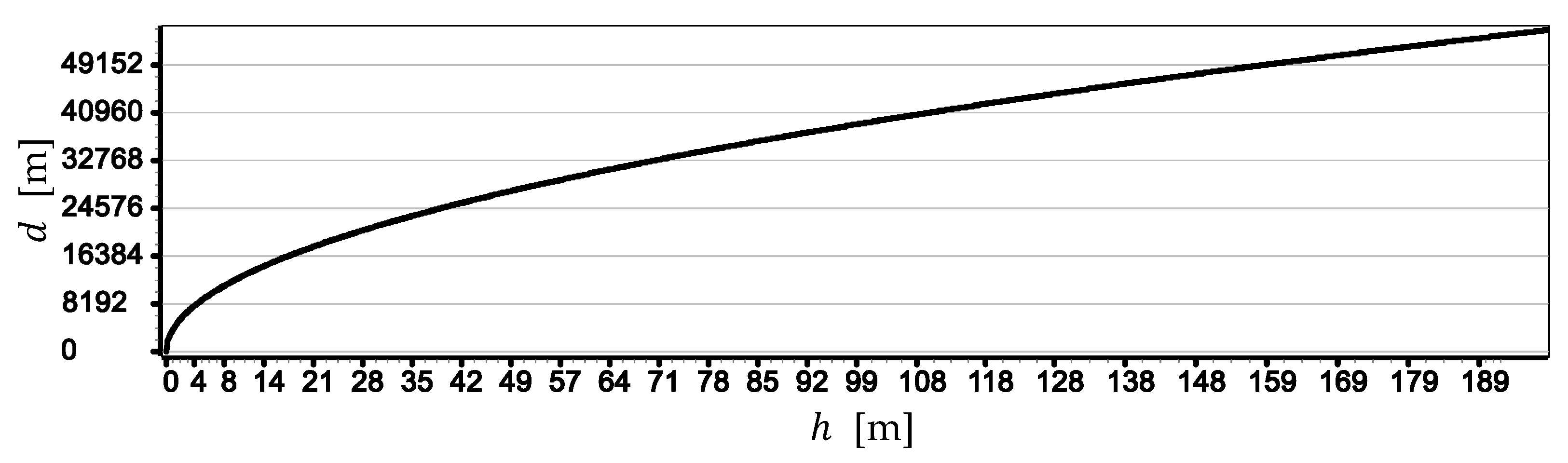
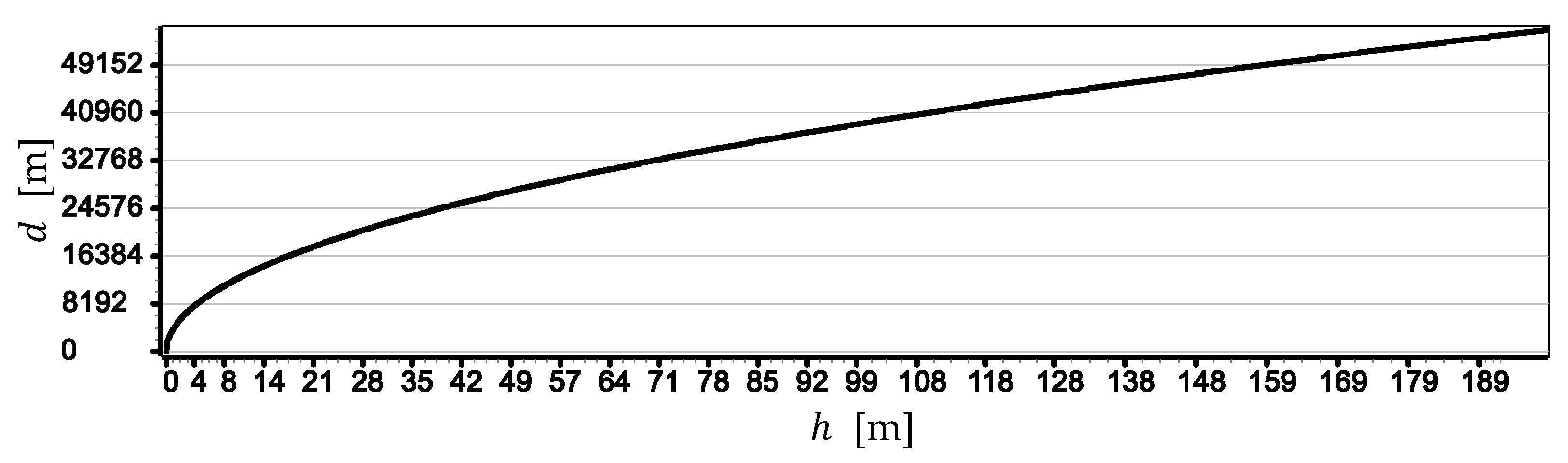
- —distance to the horizon line.
- —length of the Earth’s radius,
- —camera height above sea level (a.s.l.),
3. Research and Discussion
- = 6,378,000.0 m,
- = 0.16 (average value of refraction coefficient for the Baltic Sea),
- = (0 m, 200 m),
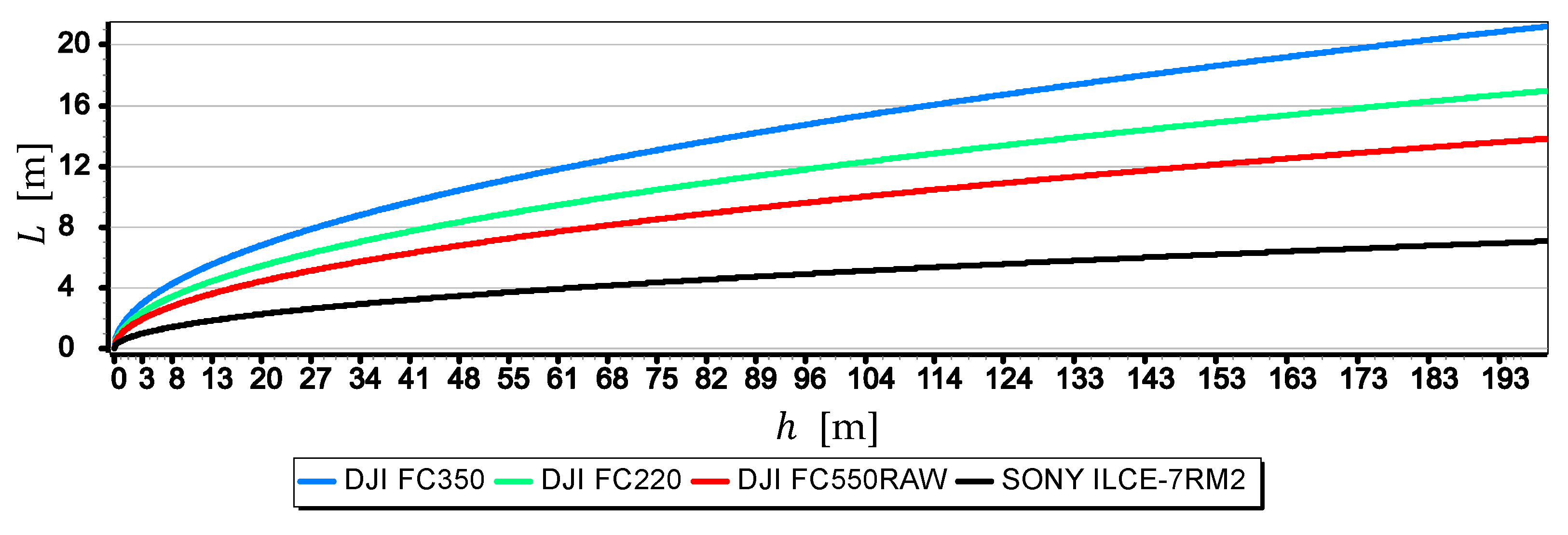
- = 4 mm (DJI FC350), 5 mm (DJI FC220), (4 mm, 14 mmm) (DJI FC550RAW), 35 mm (SONY ILCE-7RM2);
3.1. Measurement Resolution Analysis
3.1.1. Measurement Resolution of a Single-Pixel
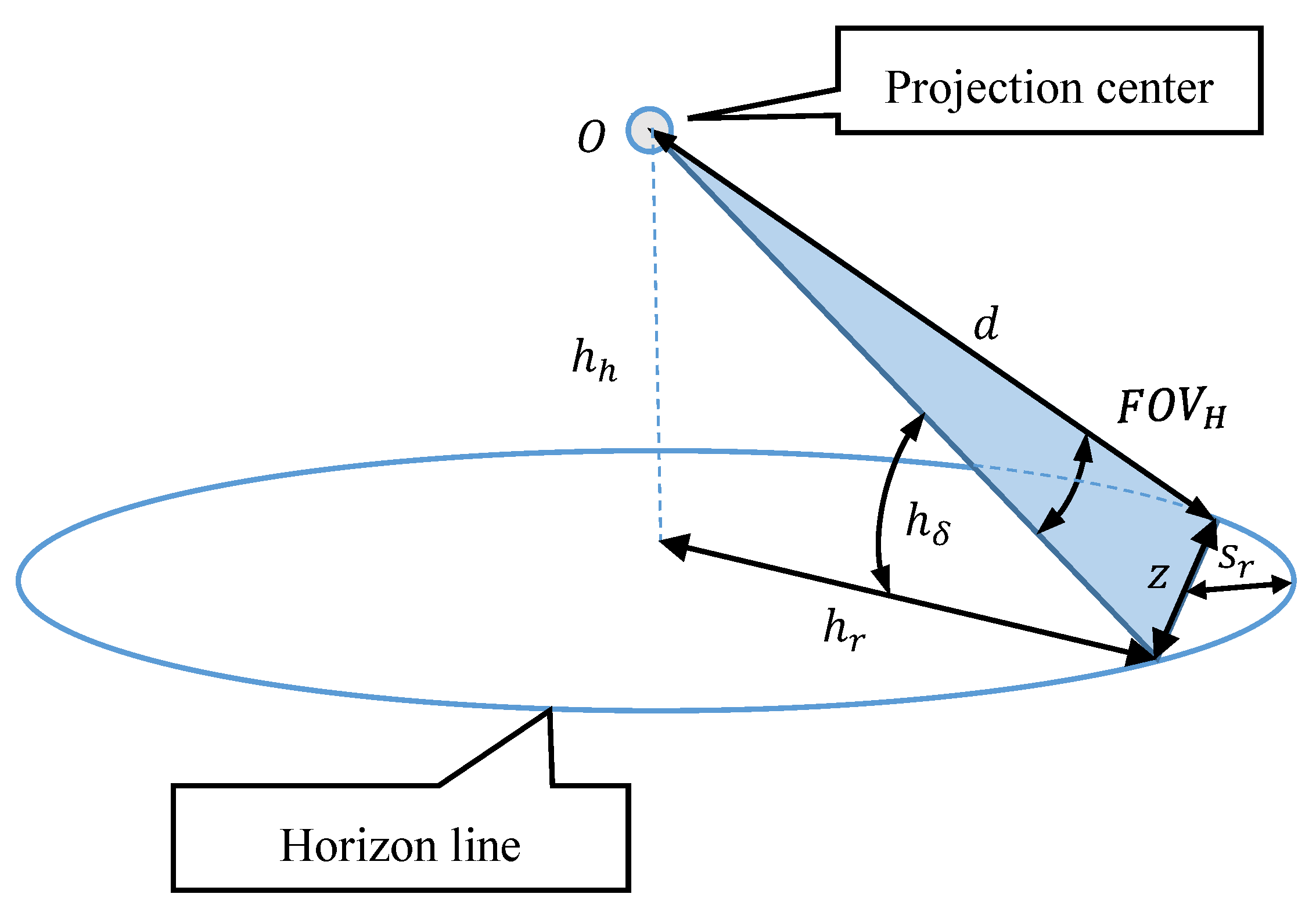
3.1.2. Resolution of the Horizon Slope Measurement
3.2. Analysis of the Mean Error of Measurement
3.2.1. Analysis of the Impact of on
3.2.2. Analysis of
3.2.3. Analysis of
3.2.4. Analysis of
- has the least effect on the value of ;
- for small angles i have the greatest impact on the value of , while for larger ones-.
4. Conclusions
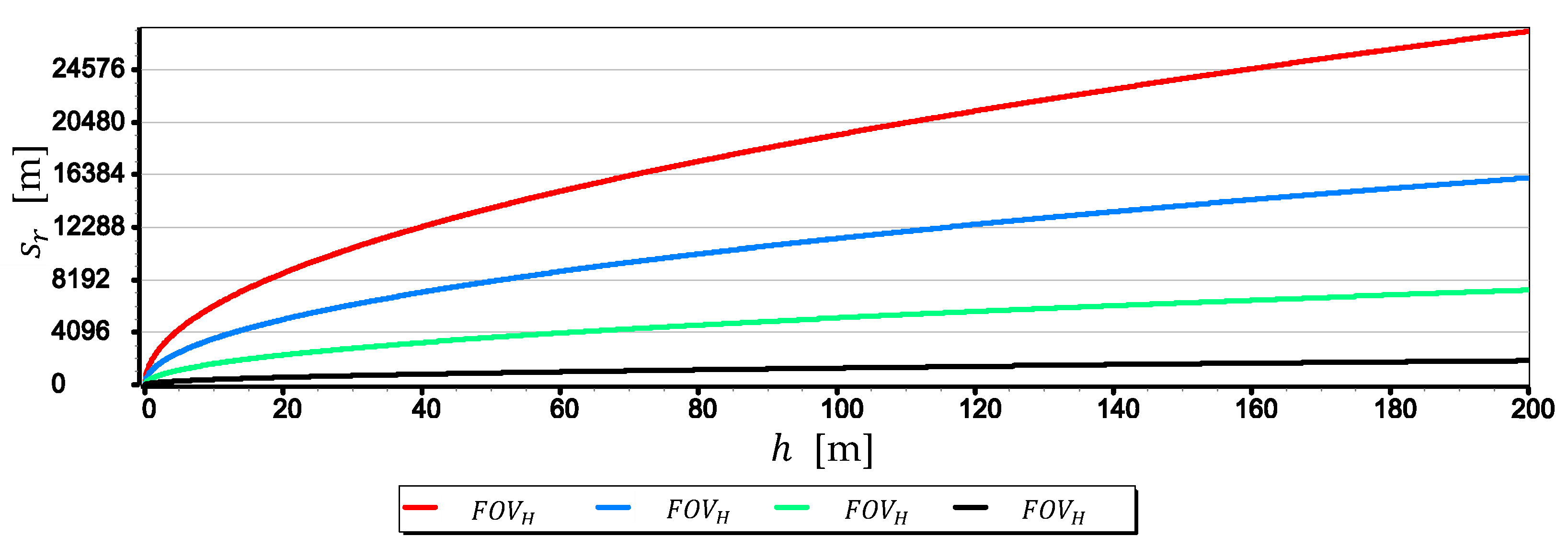
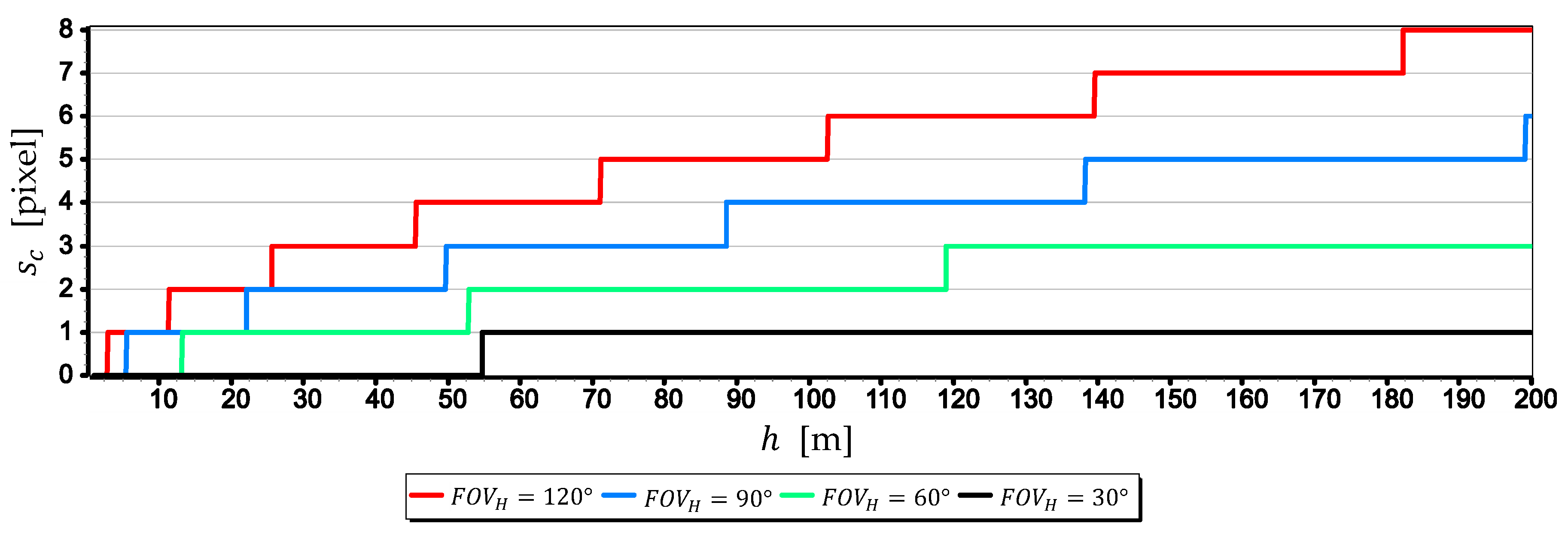
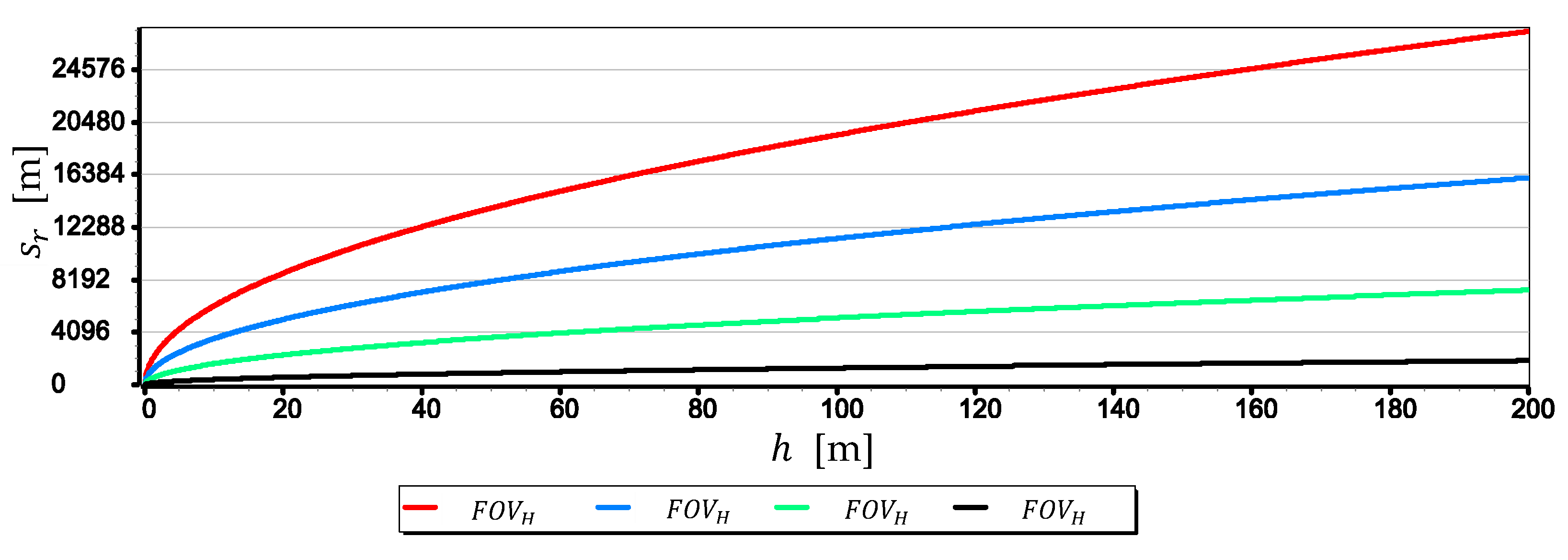
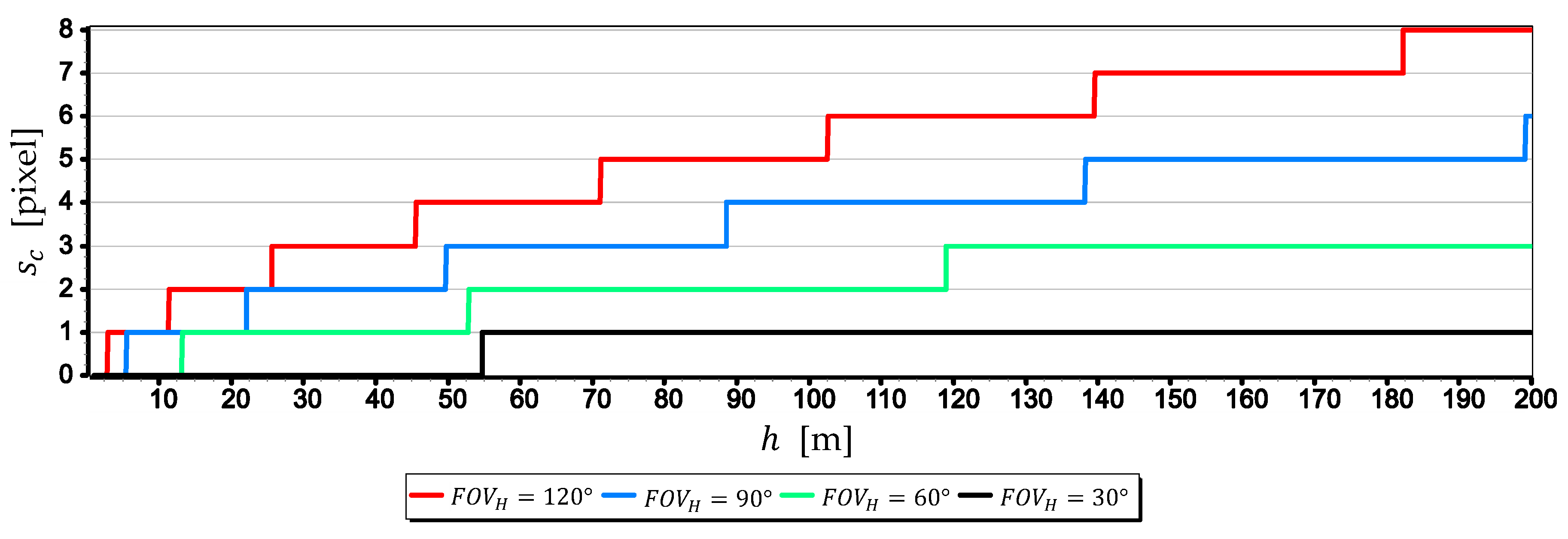
- The image of the sea horizon can be curved already at camera heights , and with the increase in height and the camera field of view, this curvature can increase. At a height of and a horizontal field of view of the camera , horizon sagitta can be as much as eight pixels (see Figure 6). Therefore, it is necessary to take this phenomenon into account in angular measurements made relative to the sea horizon using a UAV camera (especially those carried out to the entire length of the horizon line in the camera’s field of view).
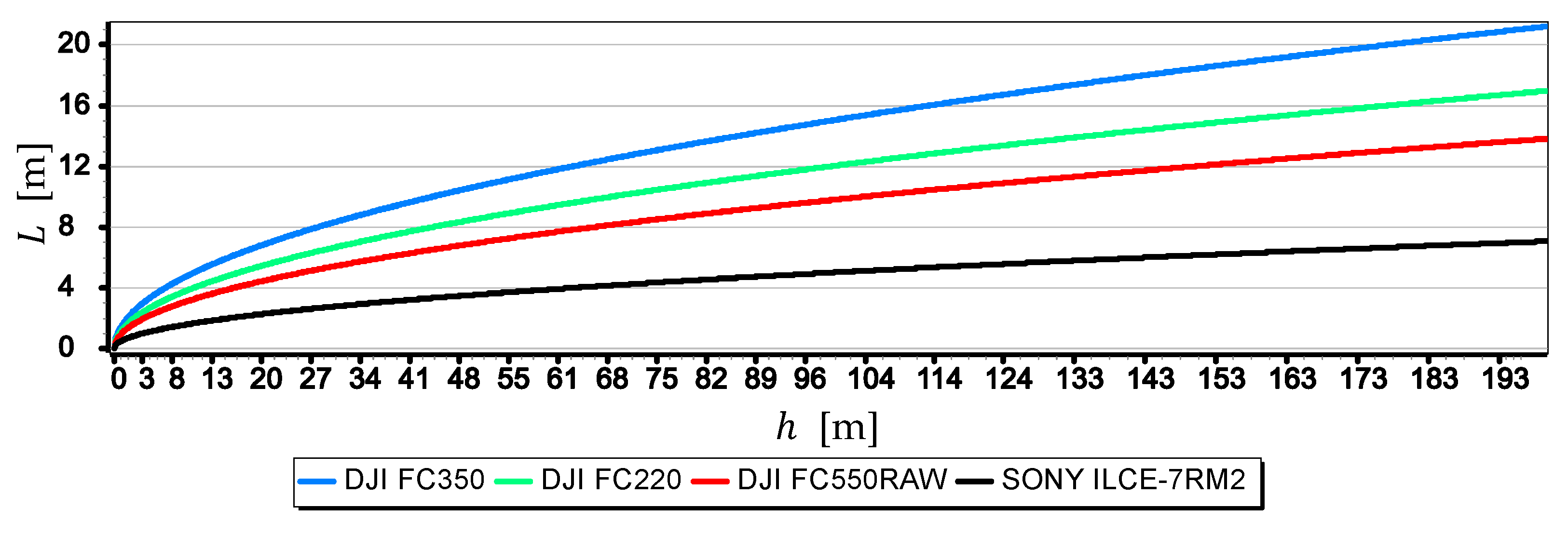
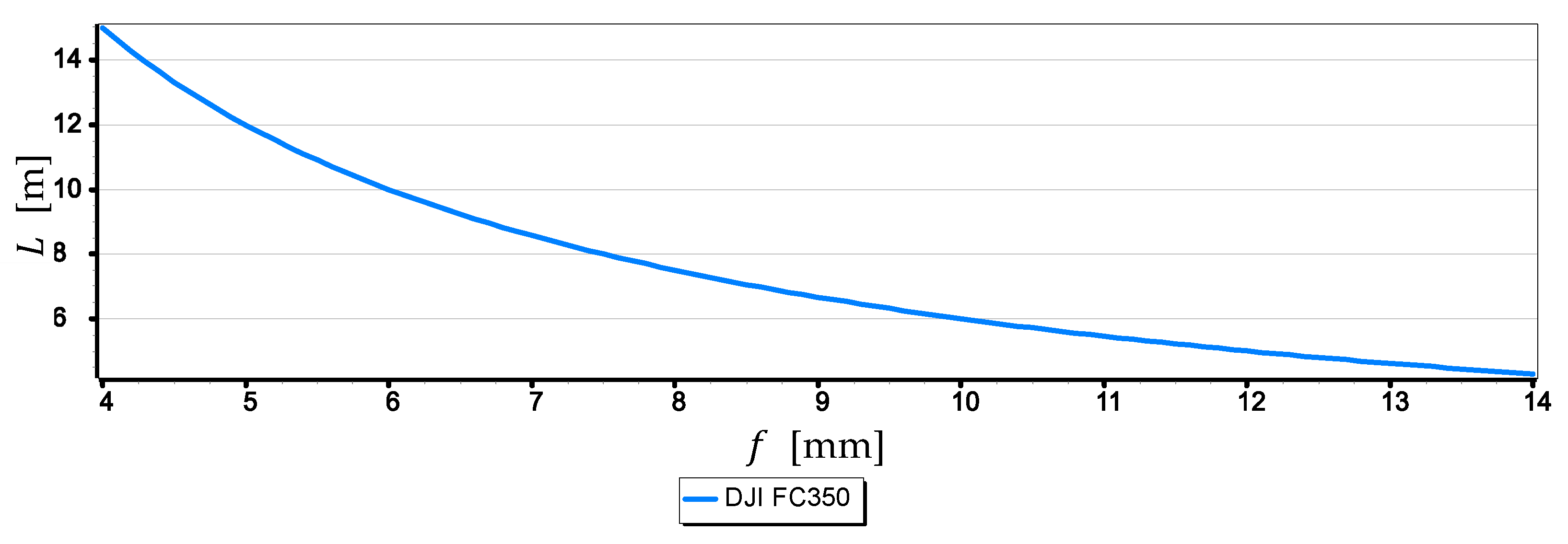
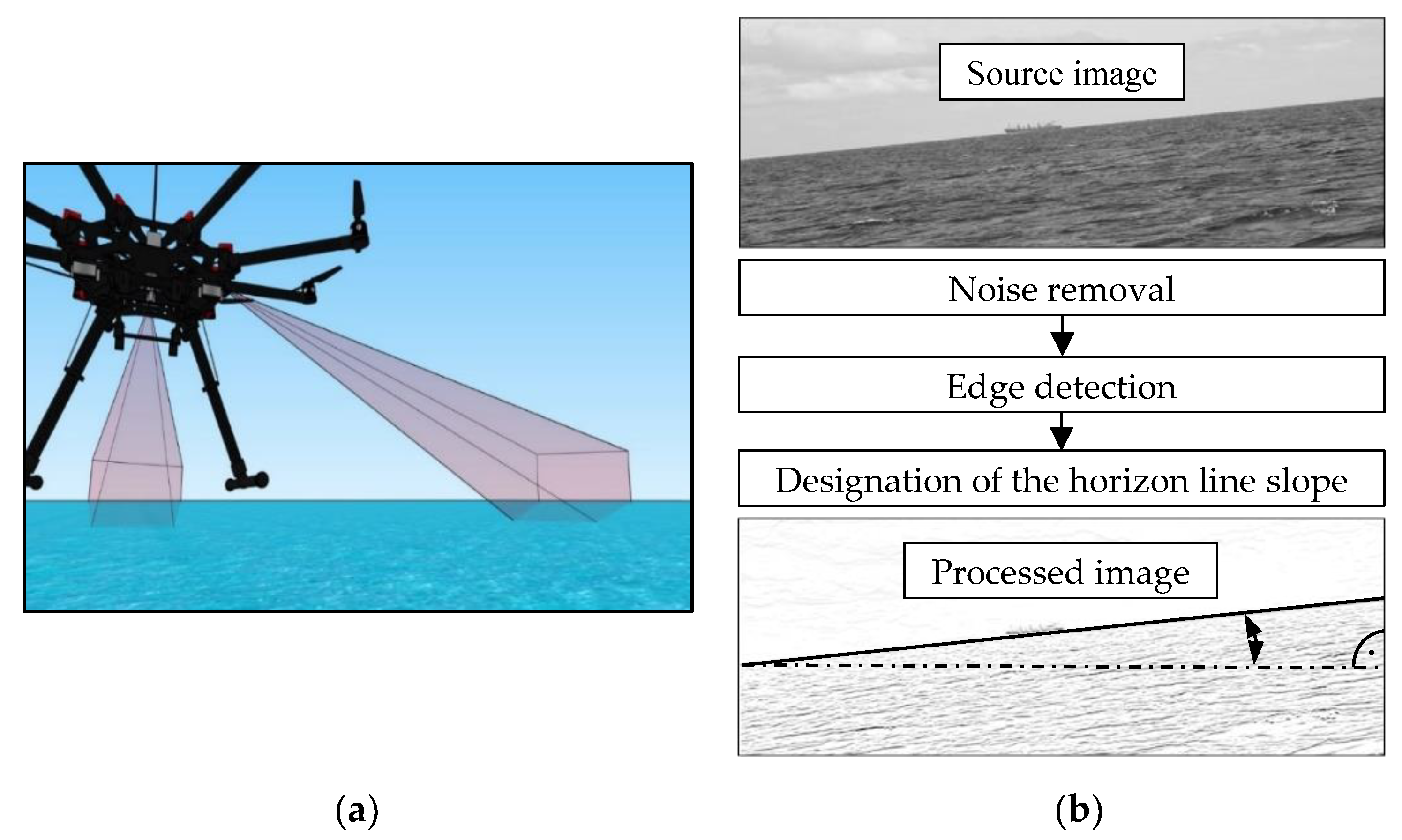
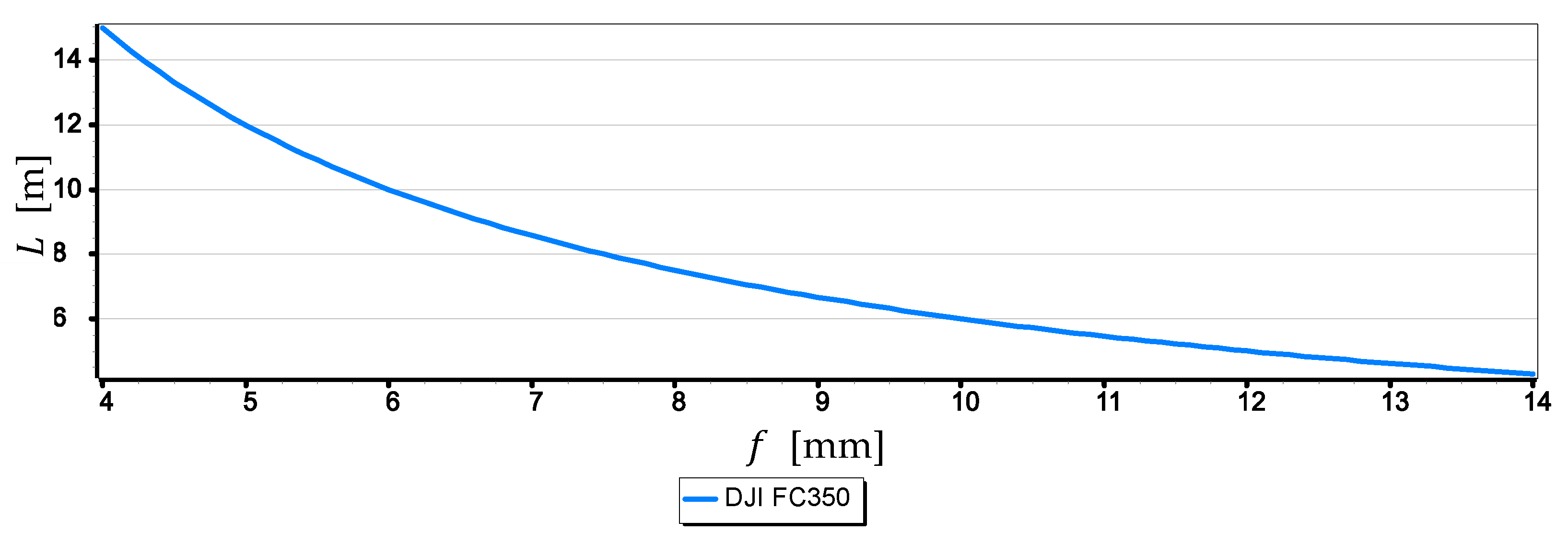
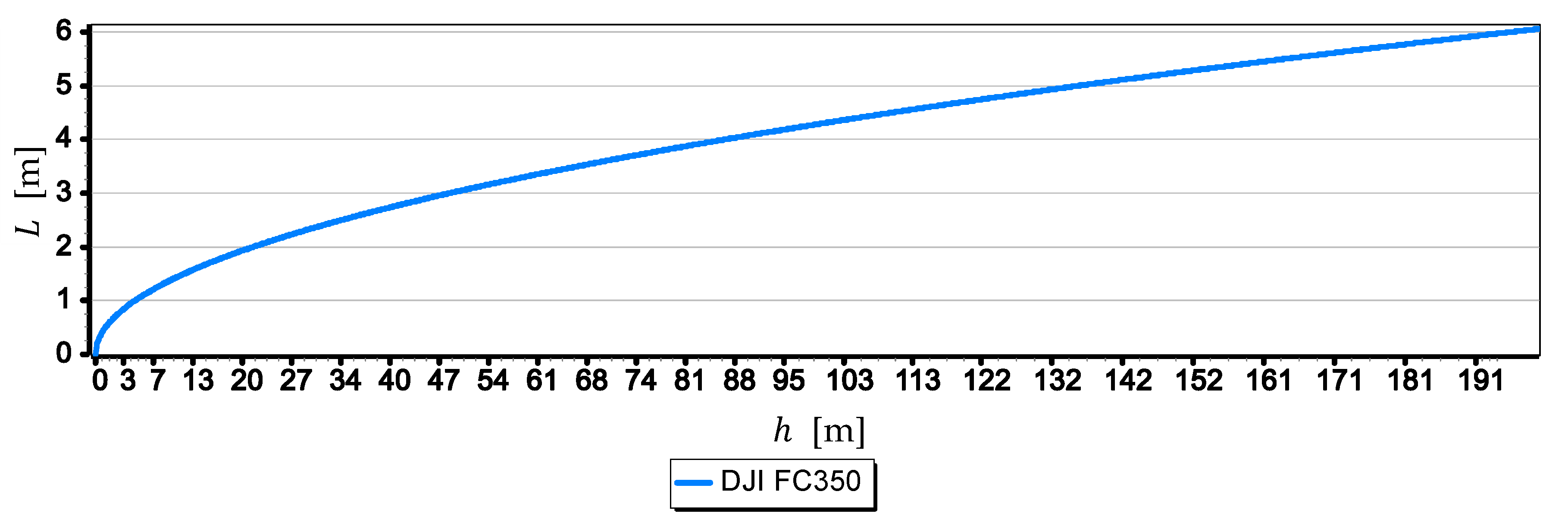
- For greater resolution of a single-pixel measurement of the horizon line, the maximum focal length should be used (see Figure 8, Figure 9 and Figure 10). Nevertheless, it should be remembered that the horizon is almost always distorted at the contact with the sea by rippling the water surface. Therefore, increasing the measurement resolution of a single-pixel to values smaller than the height of the sea waves will certainly not increase the resolution of the horizon slop measurement.
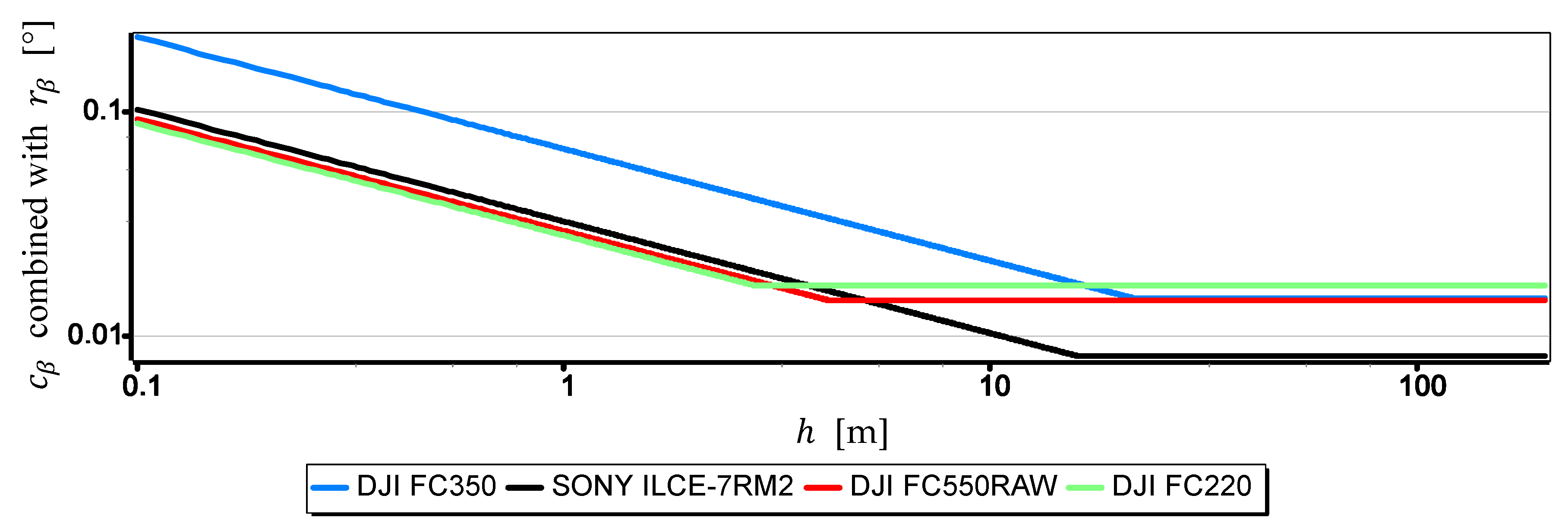
- The measurement resolution of the horizon slope with a middle-class camera (of course, today class) can be at the level of 0.02° (see Table 2, the second part of the Formula (8)). However, it should be borne in mind that up to a given camera height limit, the resolution depends not only on the parameters of the optical system but also on the height of the sea waves (see Figure 15 and Table 3). In the case of the rated cameras for the wave height , the threshold value of was as much as 21.7 m. Therefore, the measurement resolution using such ASV cameras should be calculated as the value, taking the wave height (using the first equation of Dependence (8)) into account. On the other hand, the switch to the resolution value can take place only after reaching the camera height . It means, it rather will concern measurements made from UAV.
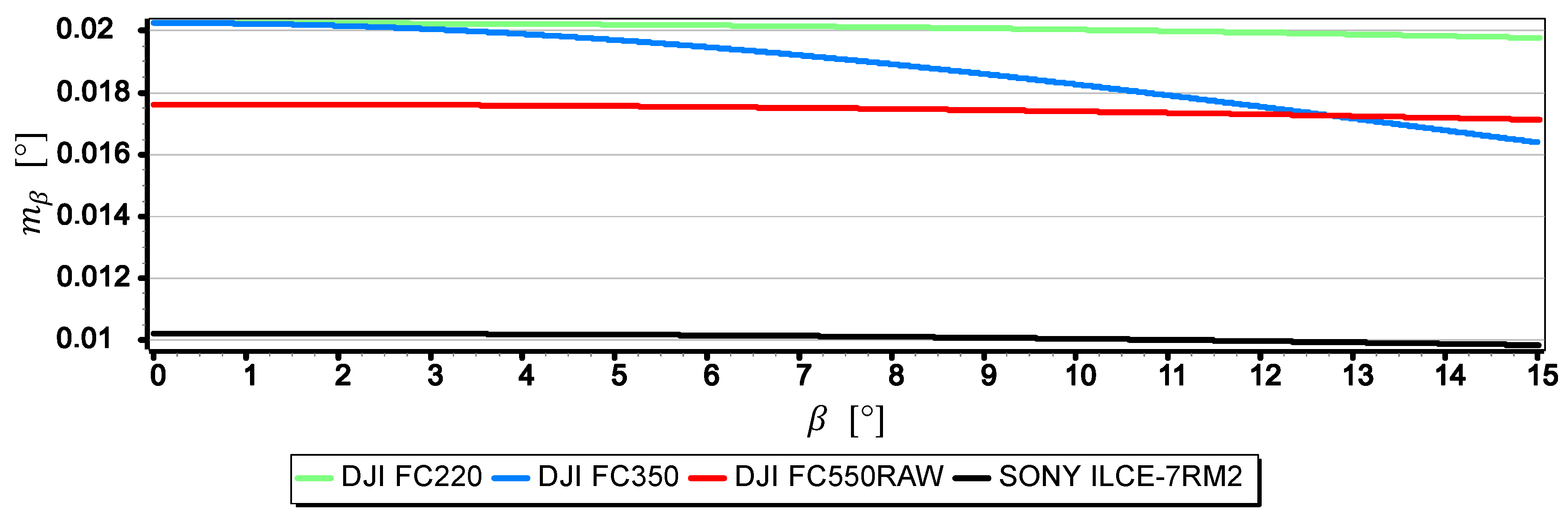
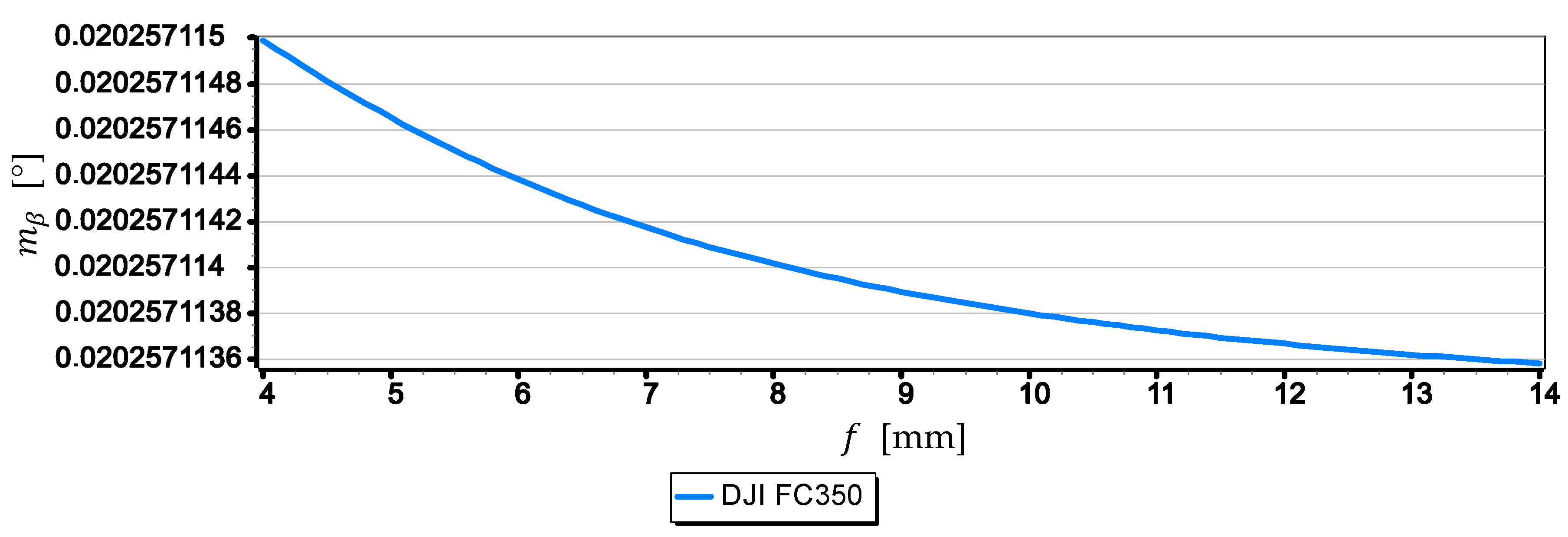
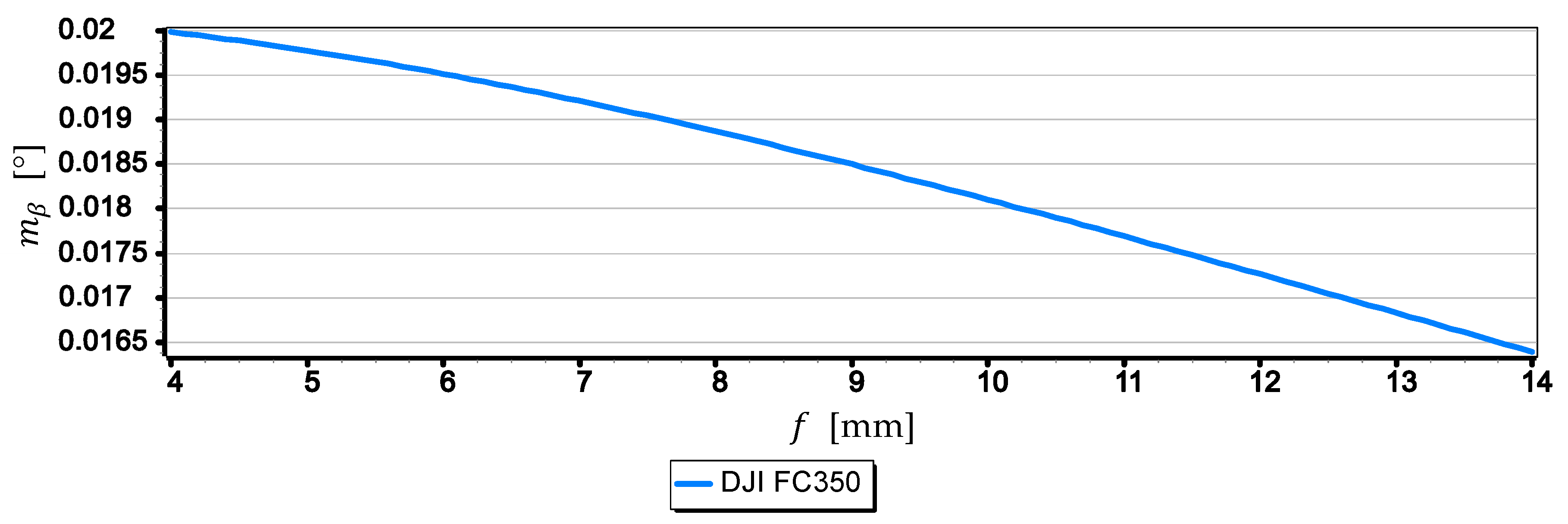
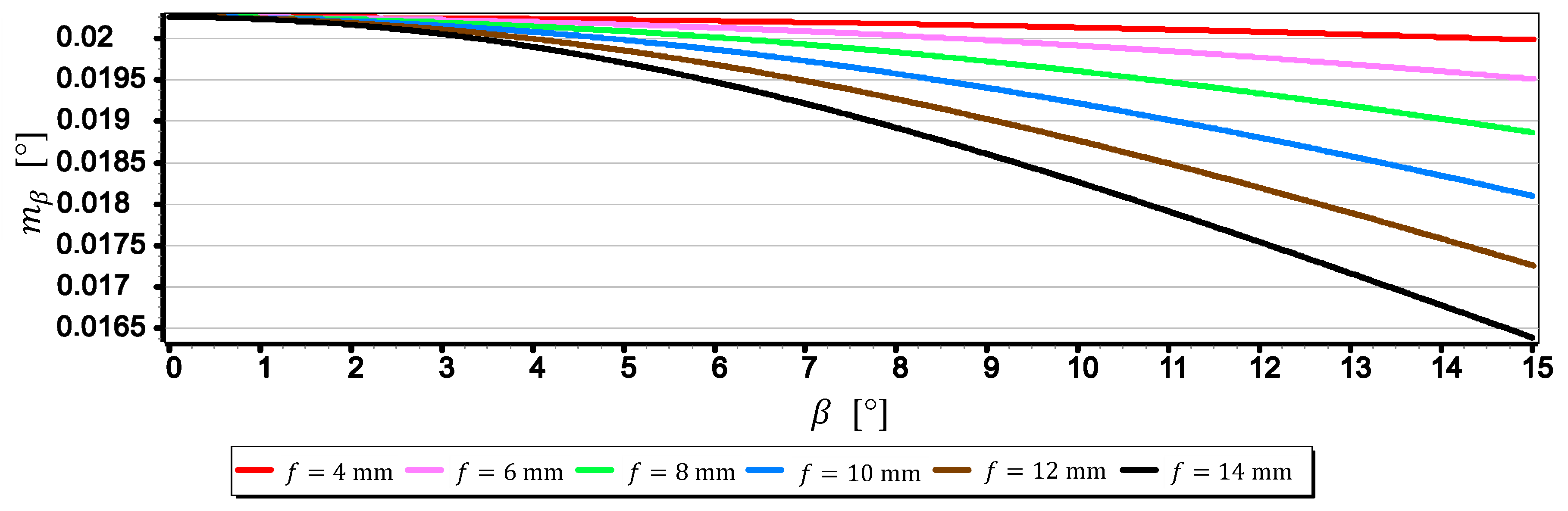
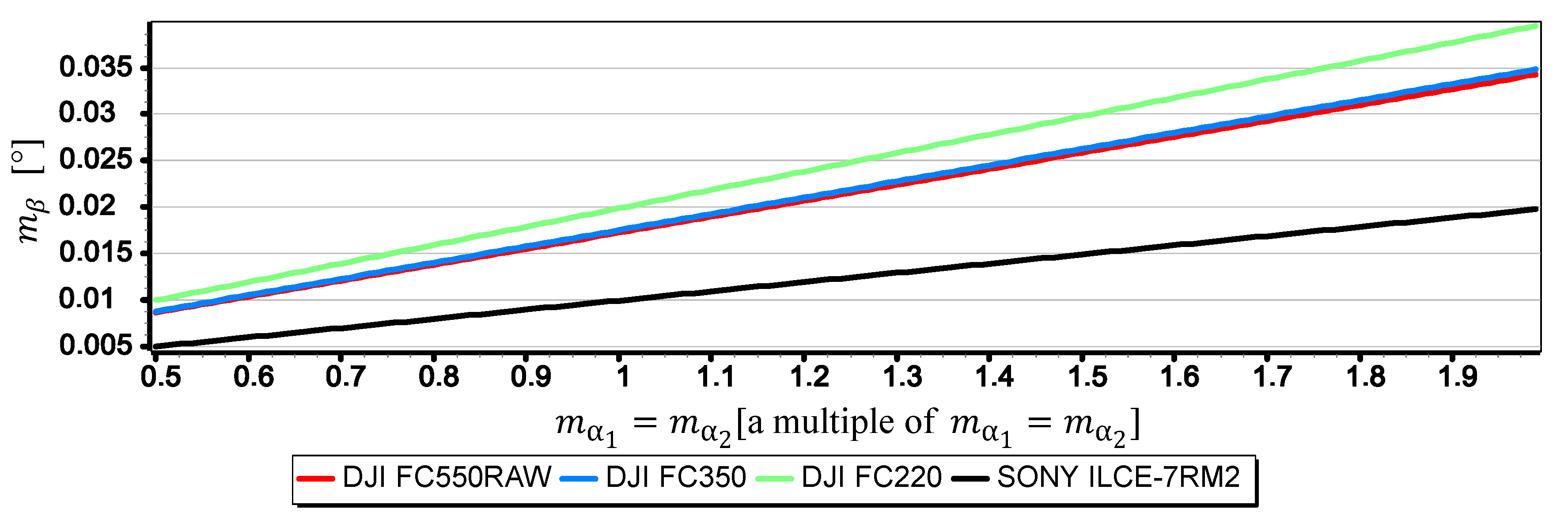
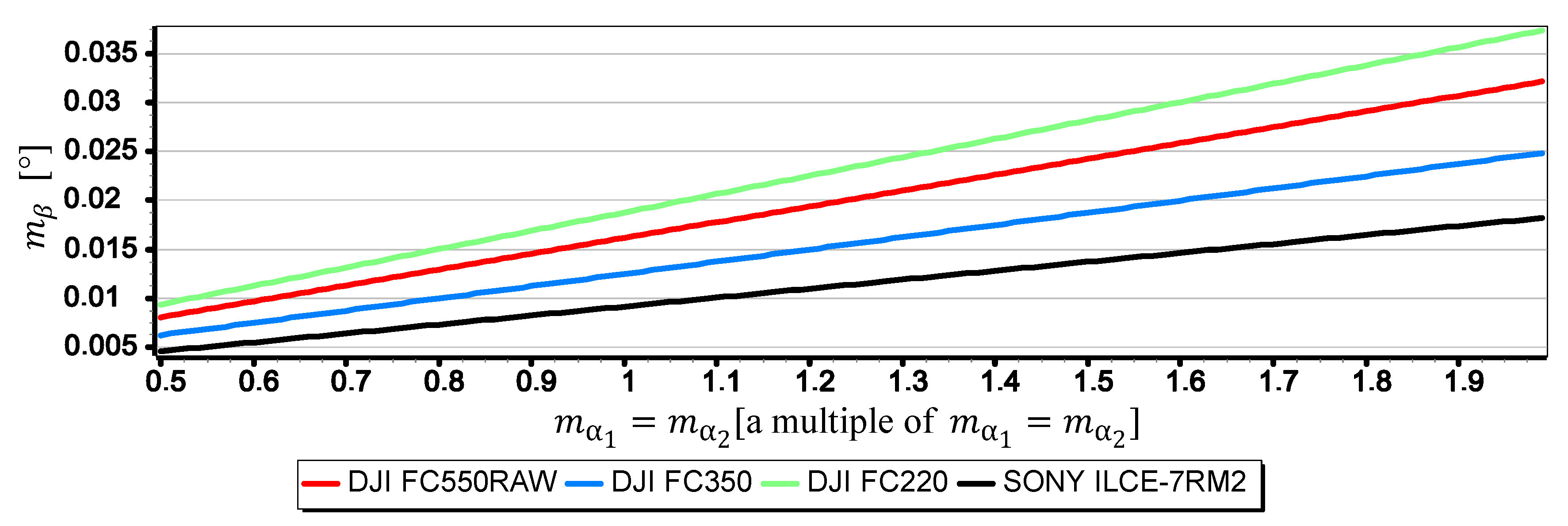
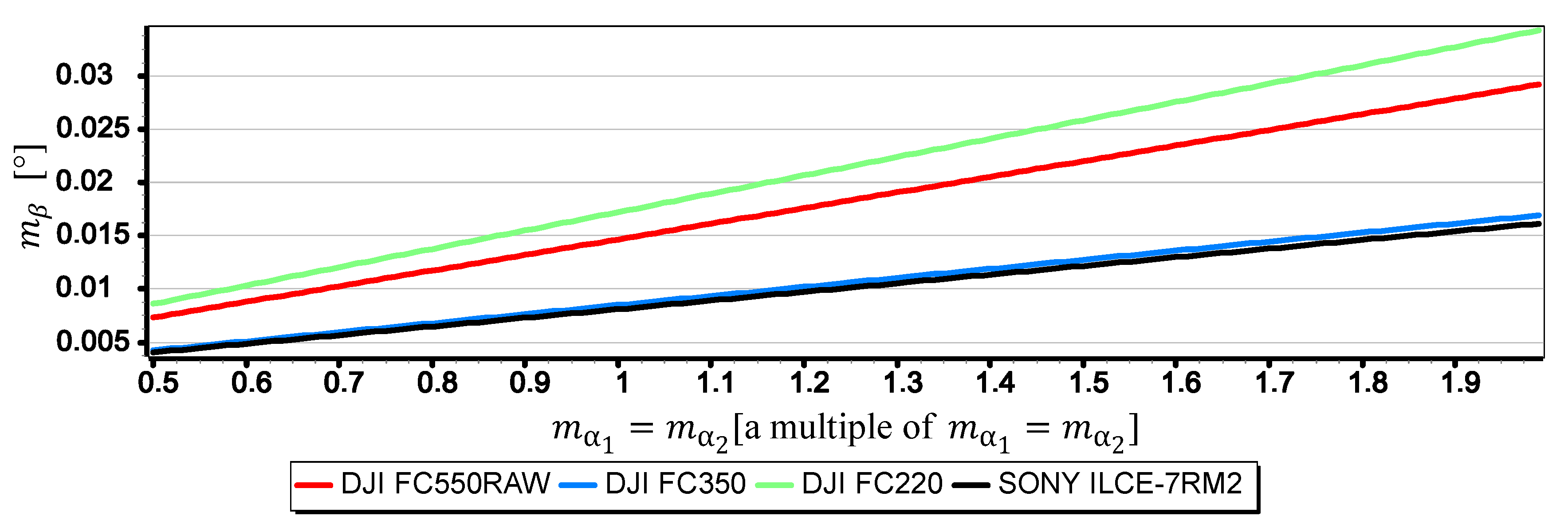
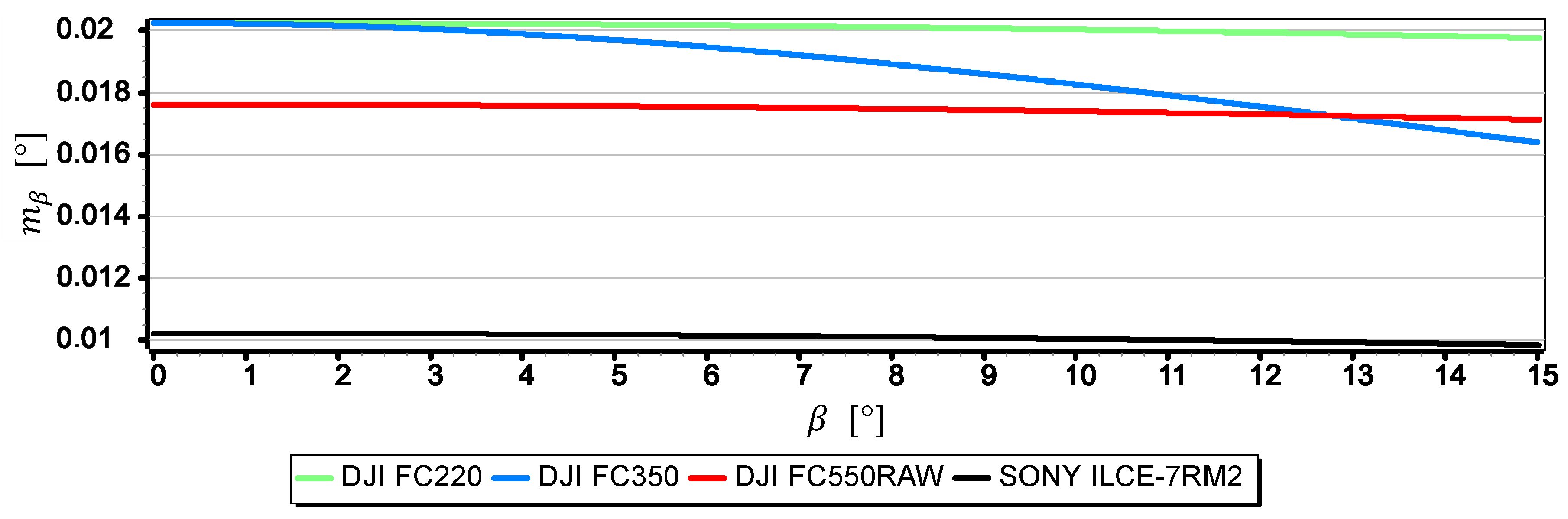
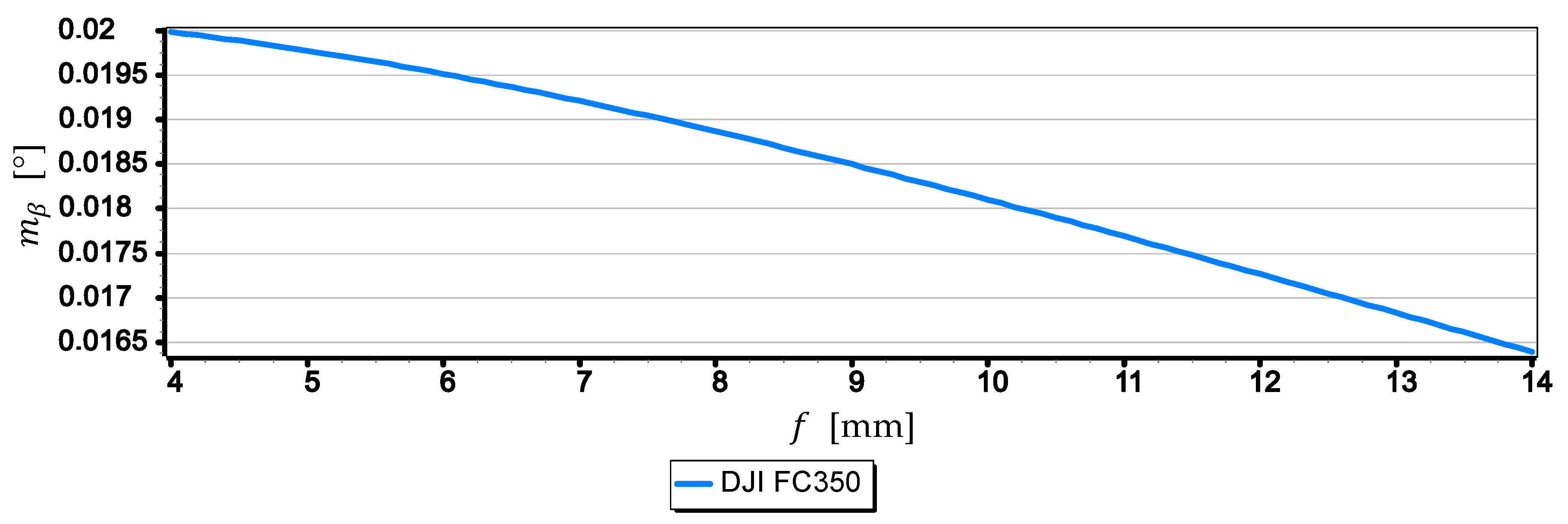
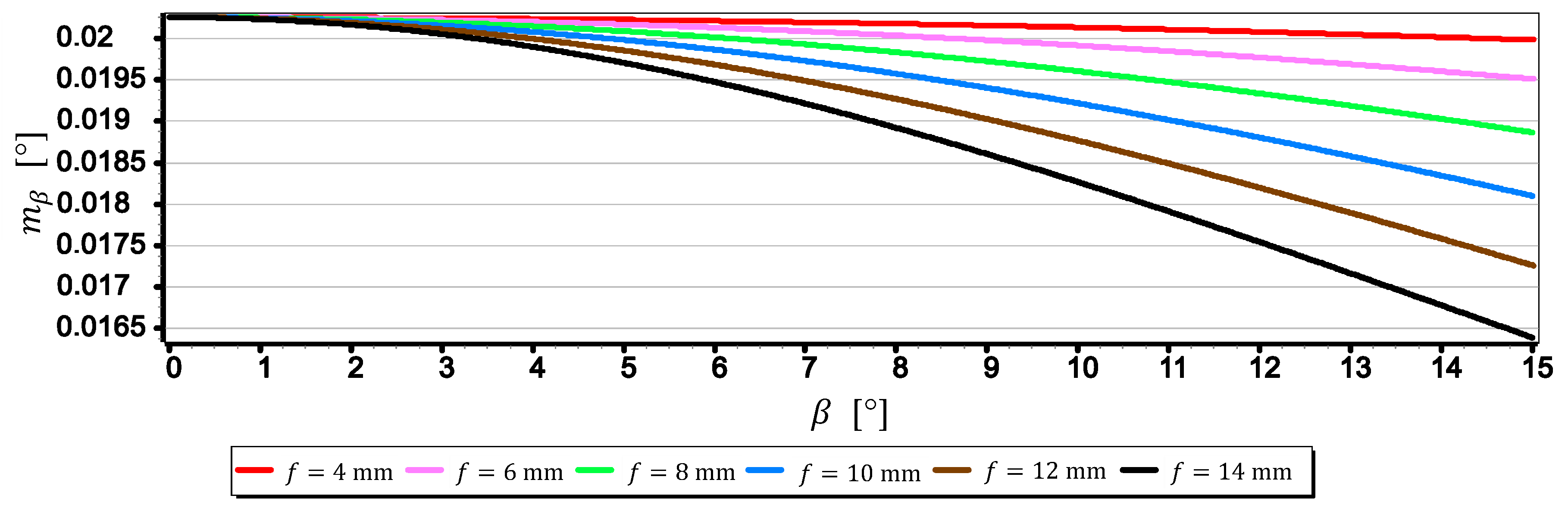
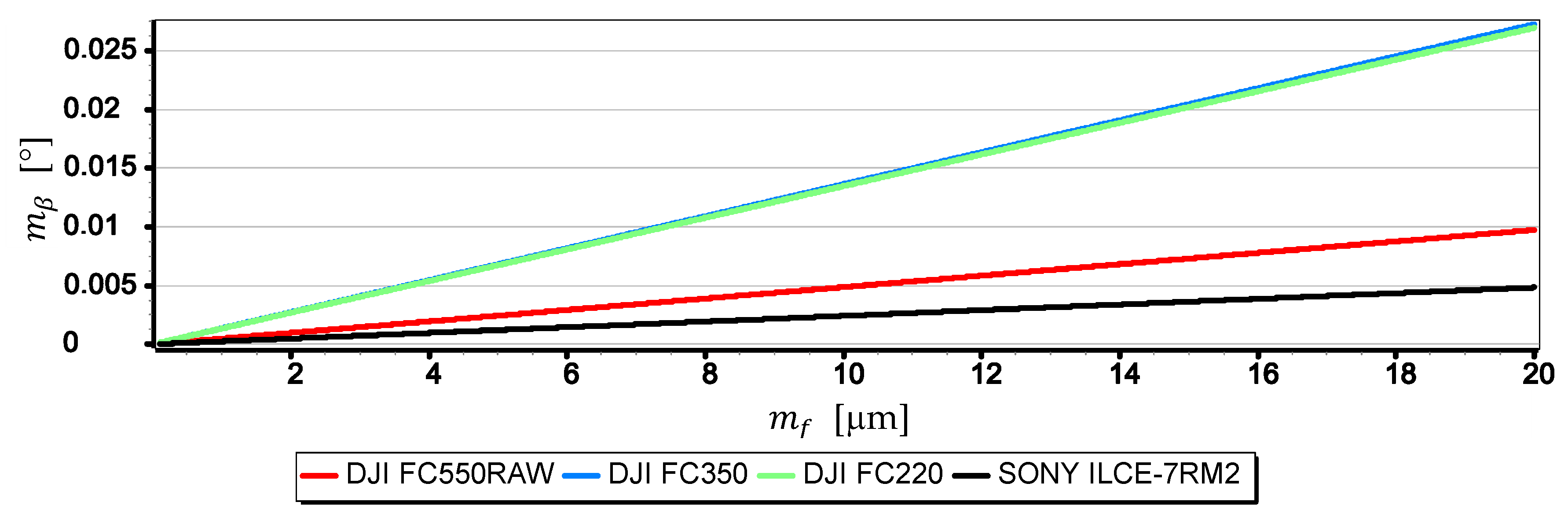
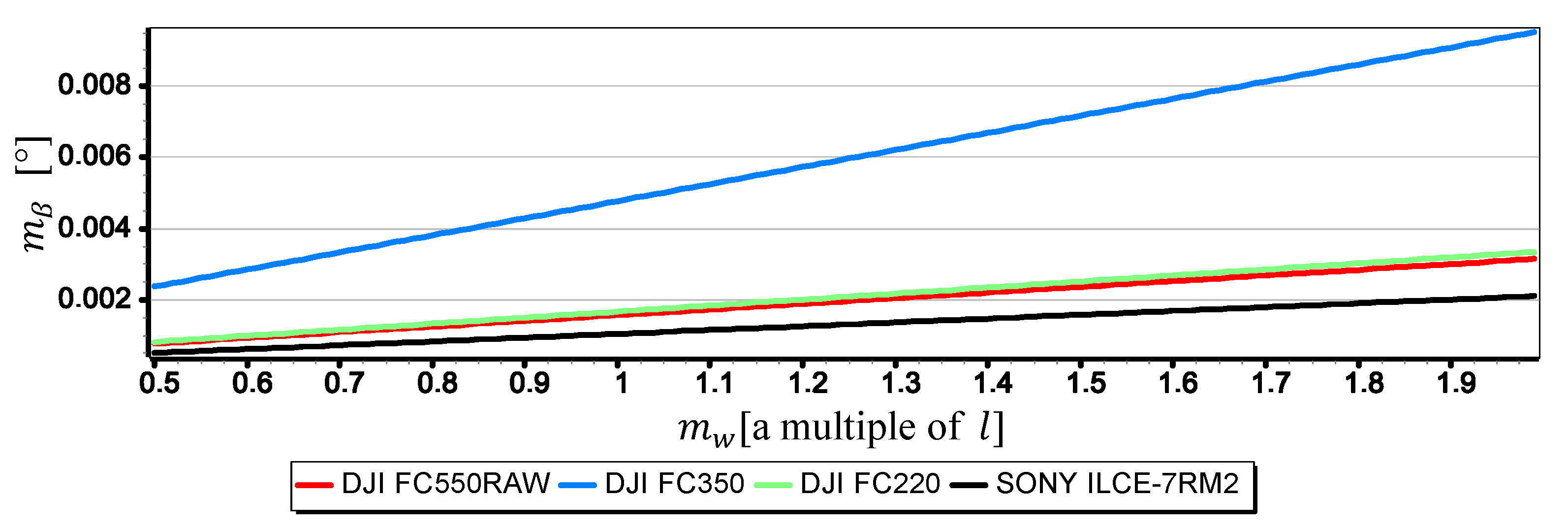
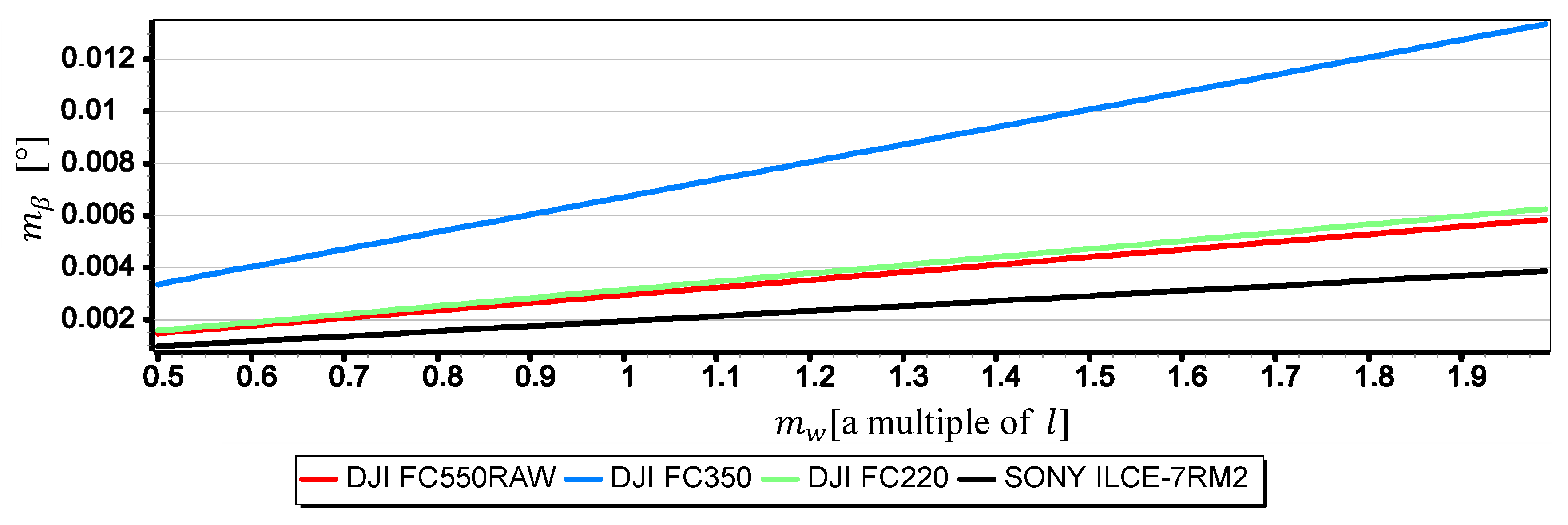
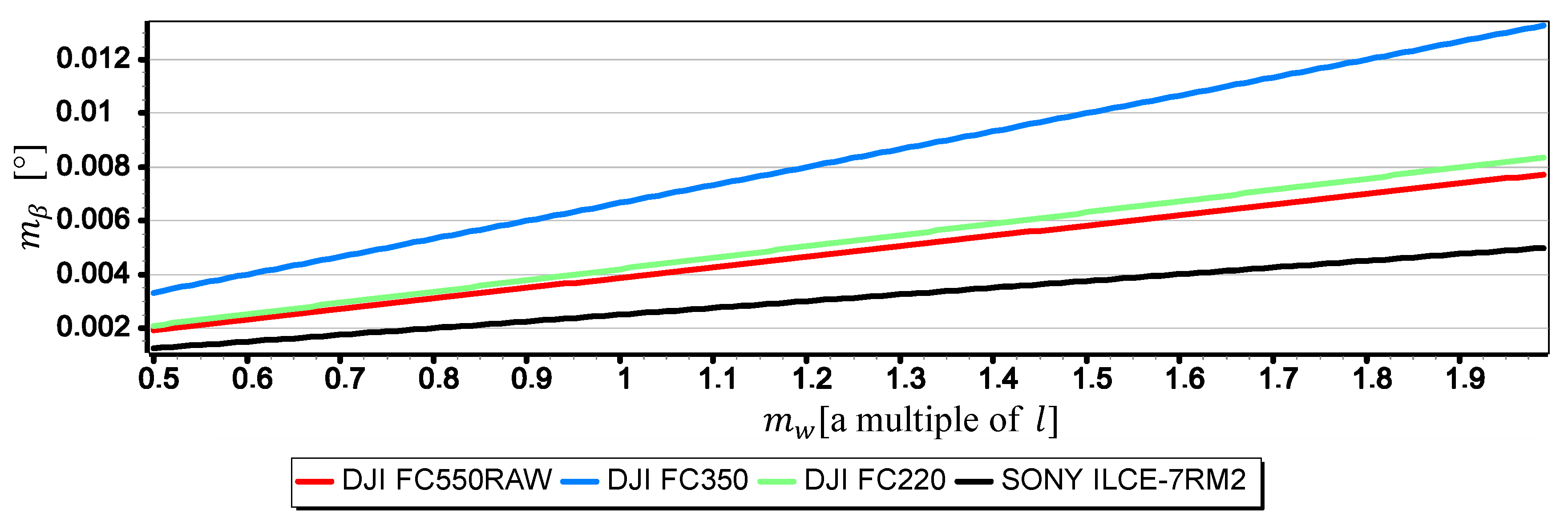
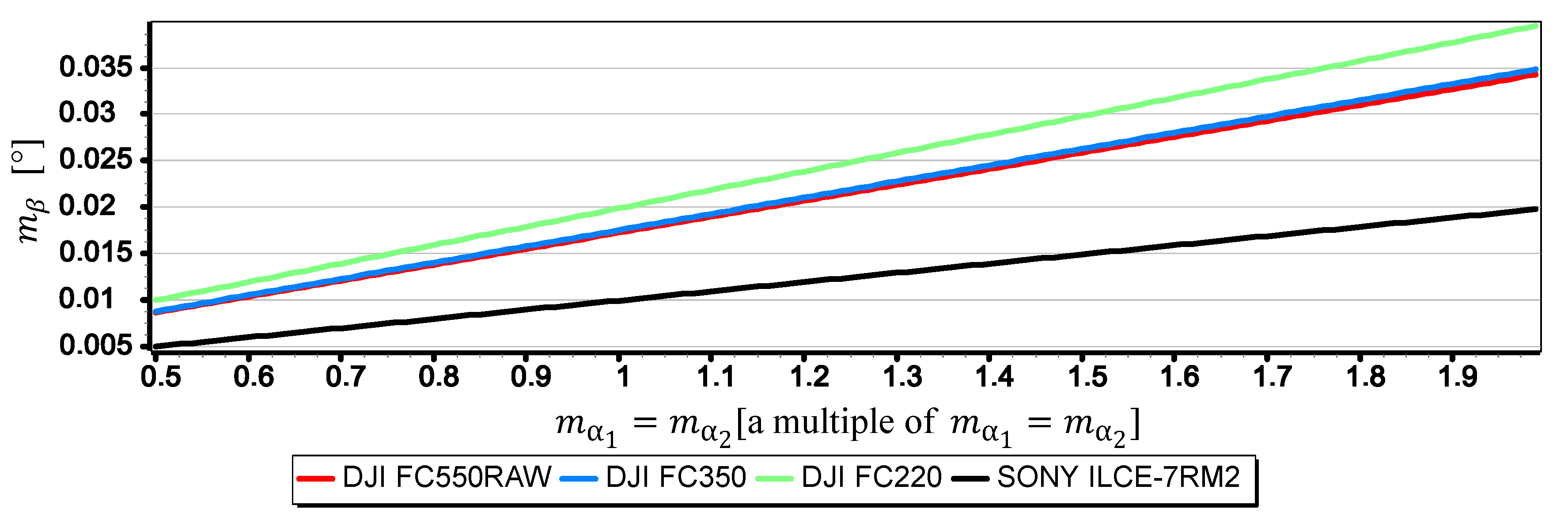
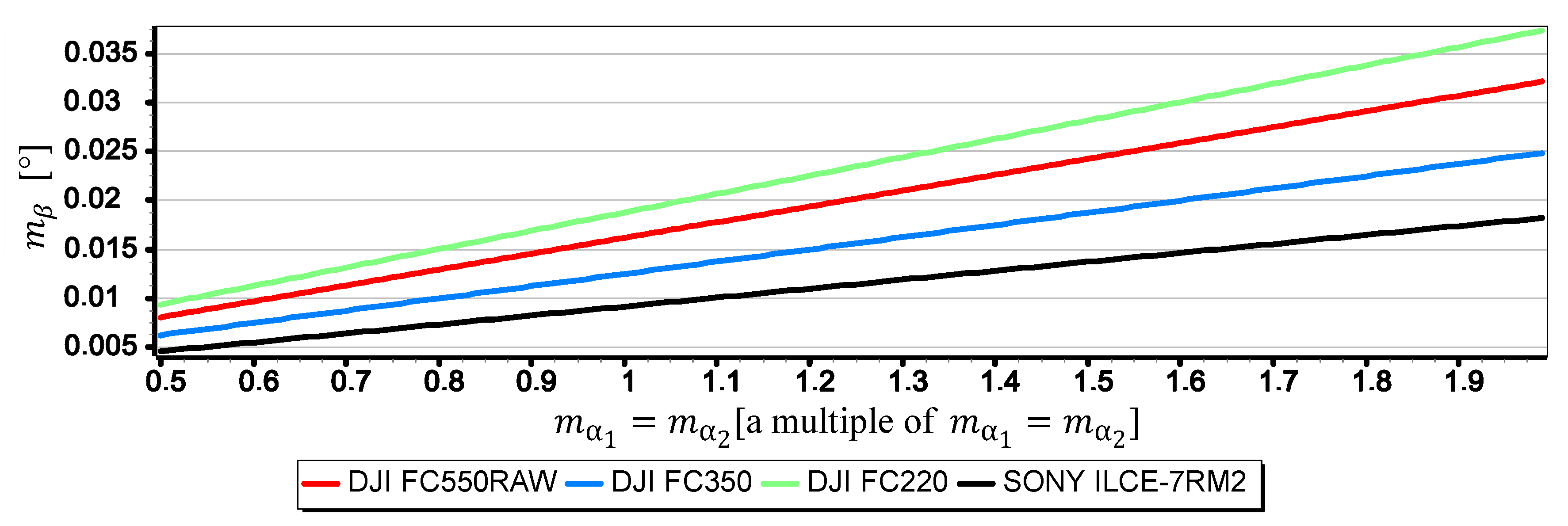
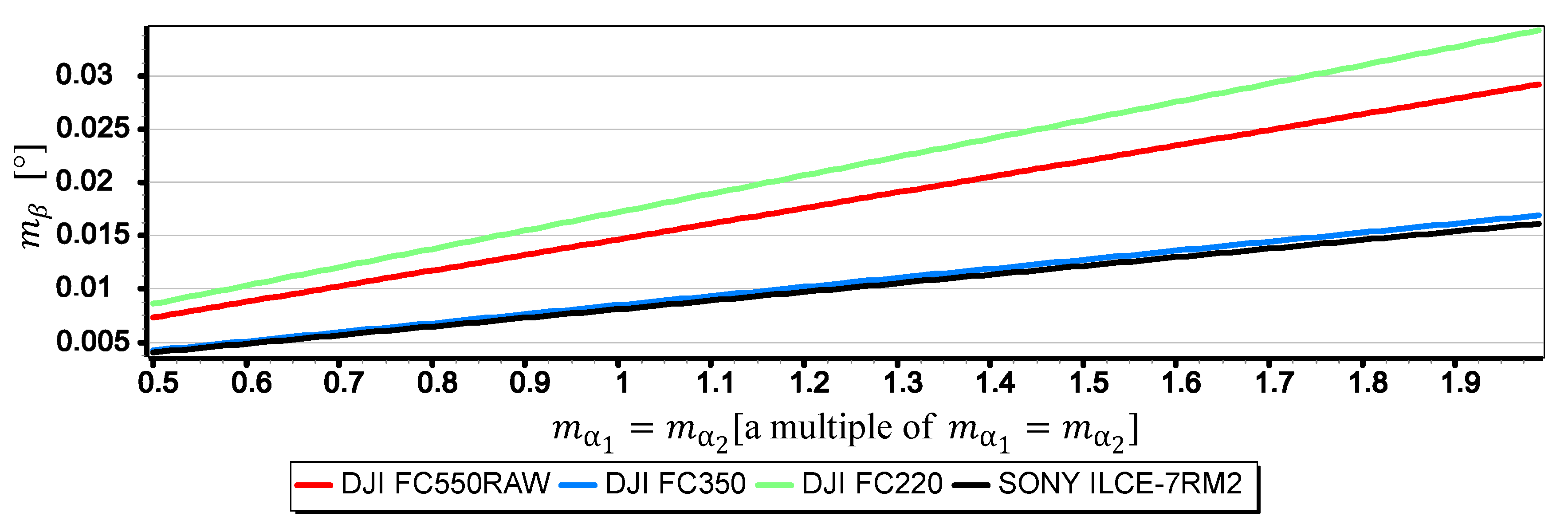
- The mean errors of the horizon slope measurements of the rated cameras were at the level of 0.02° and were similar to the resolution of measurement (see Figure 16). Its value decreases significantly with the increase of the horizon slope (see Figure 19) and the increase of the focal length (see Figure 17 and Figure 18). Therefore, to measure the horizon slope with the smallest value of the mean error (), the focal length should be set on a maximum and the camera should be rotated relative to the optical axis so that the horizon line would be along the diagonal of the matrix.
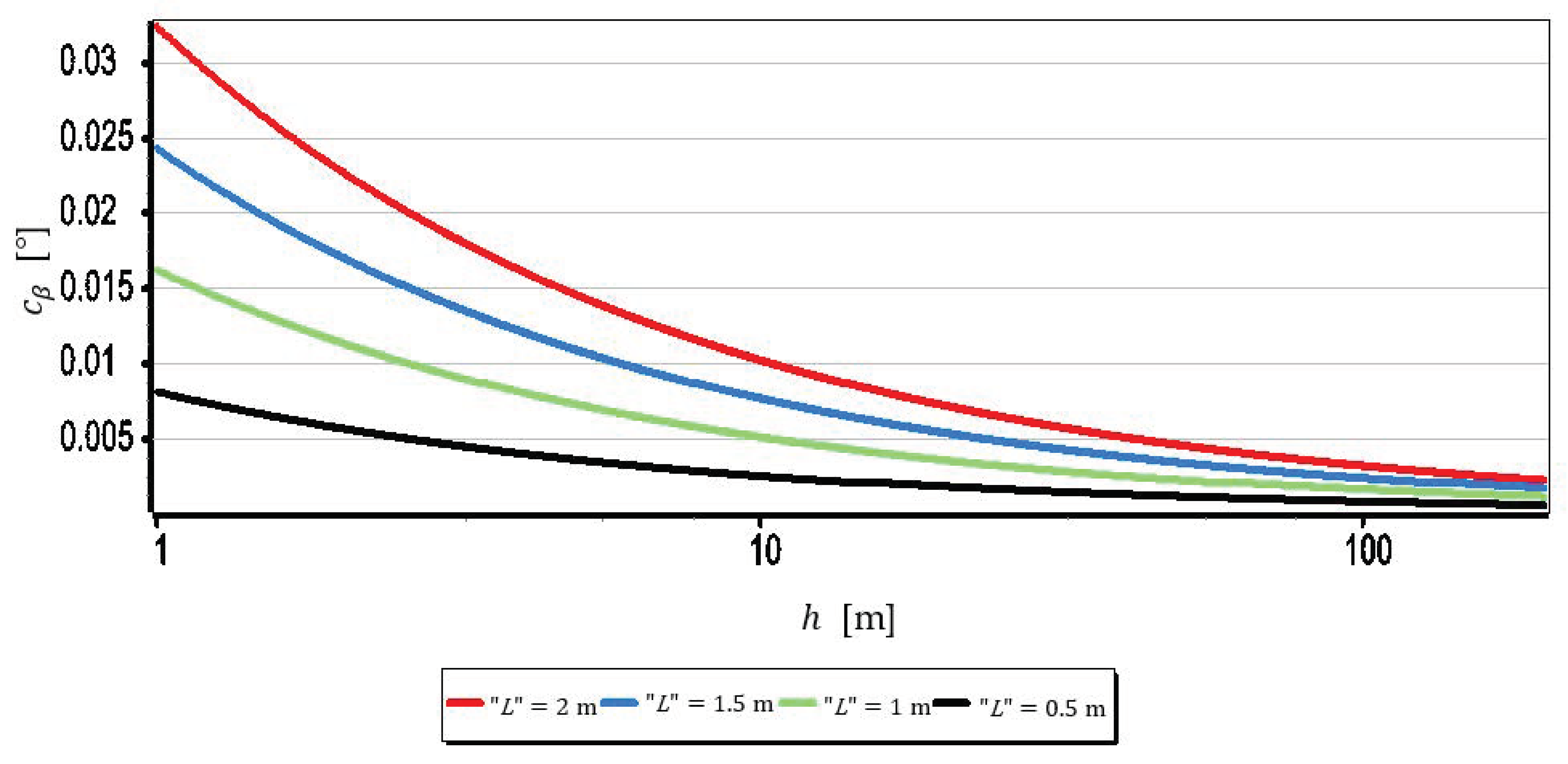
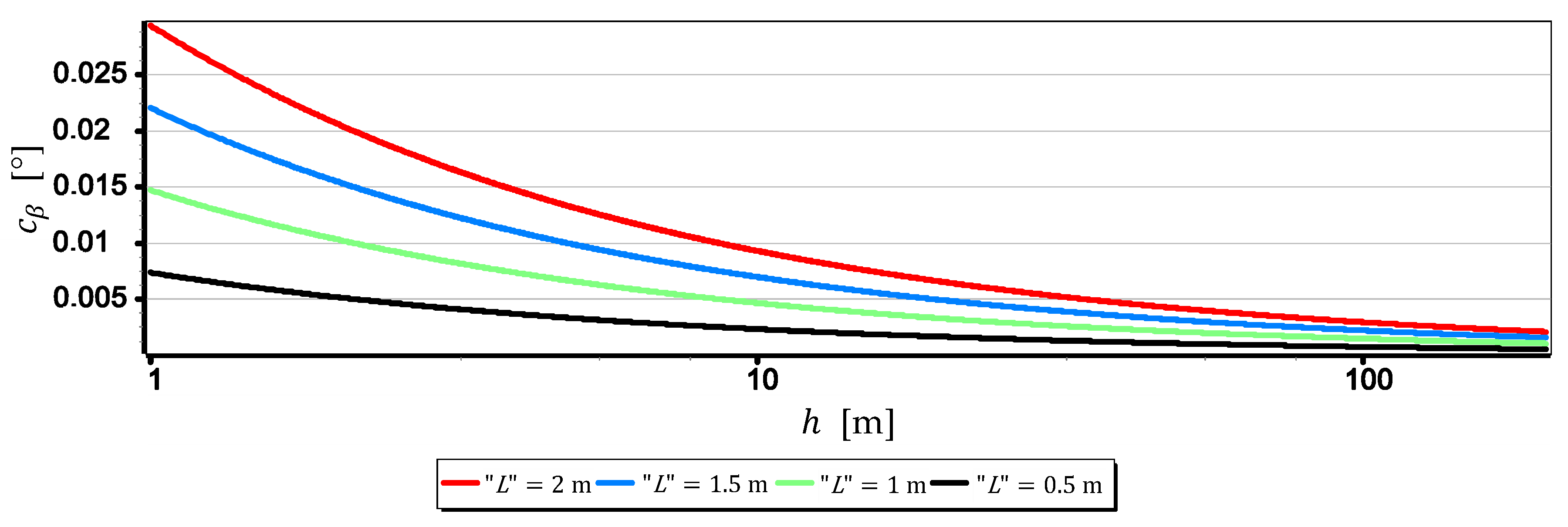
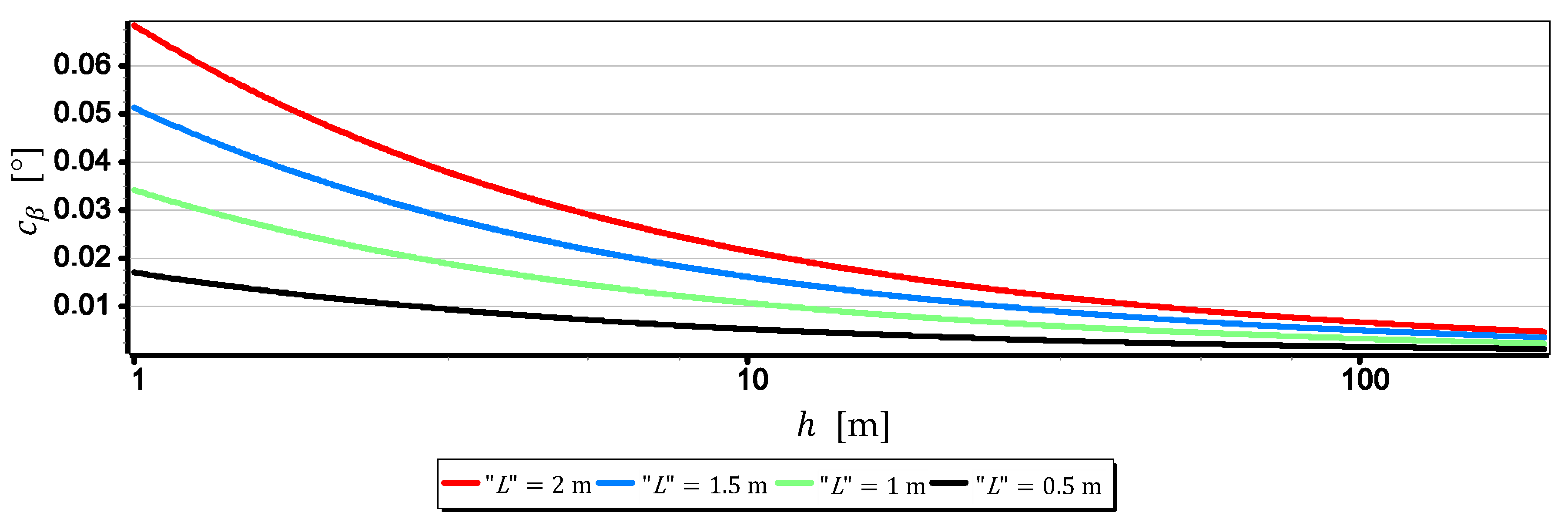
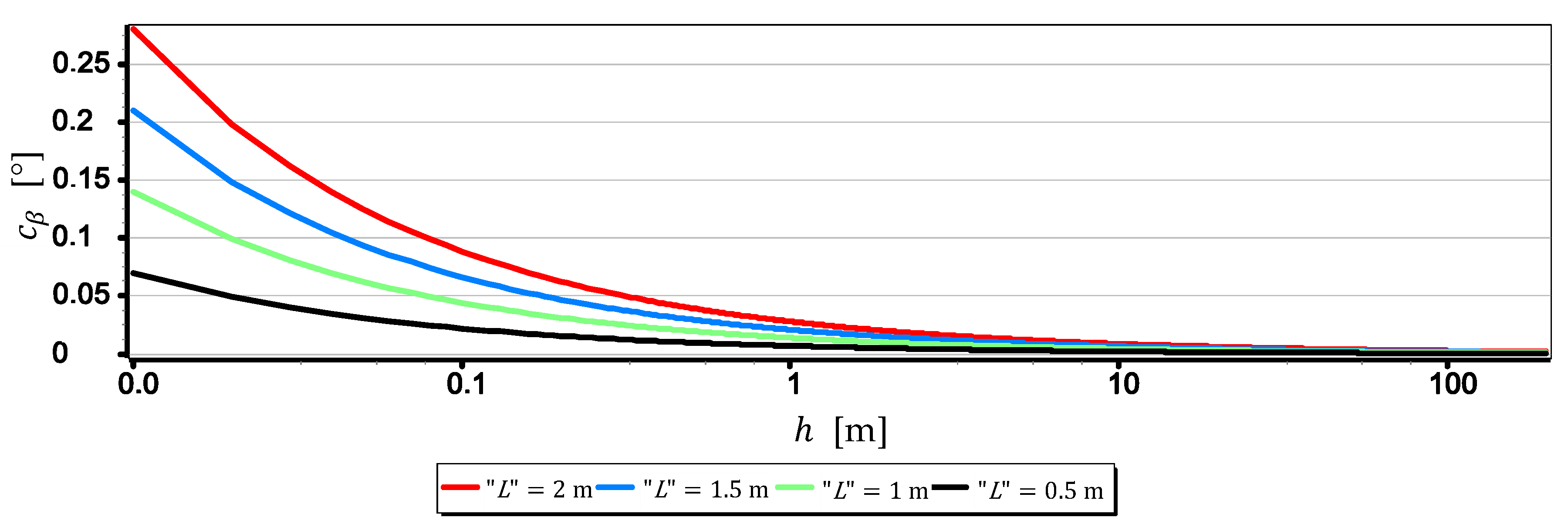
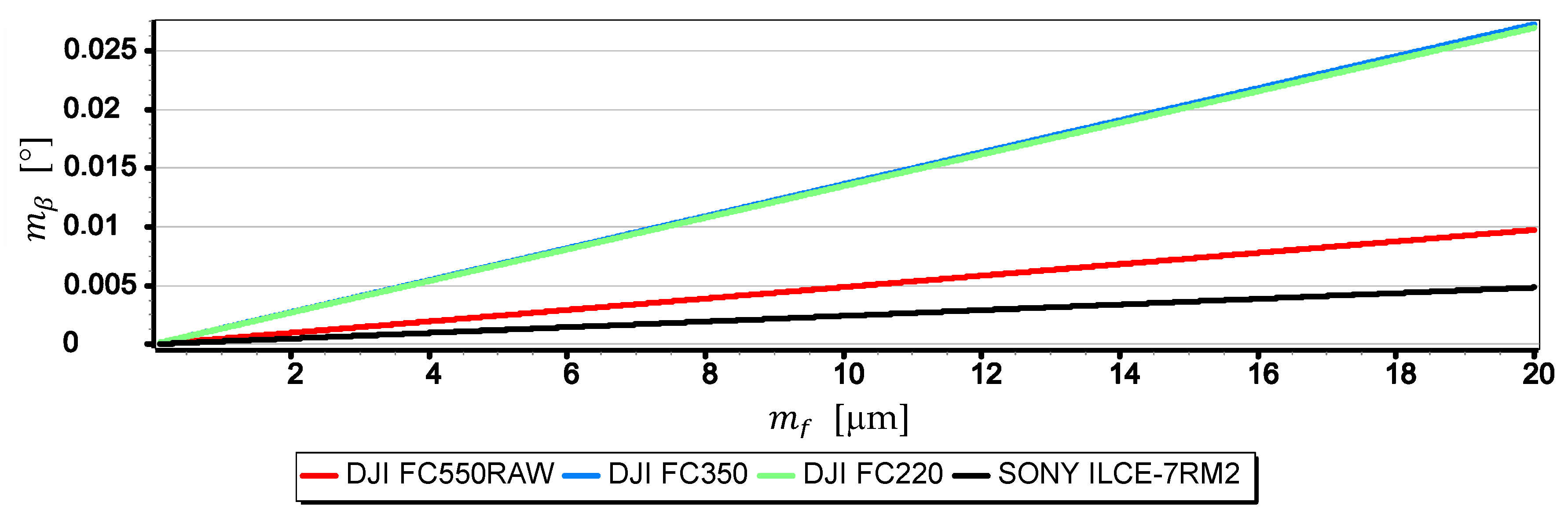
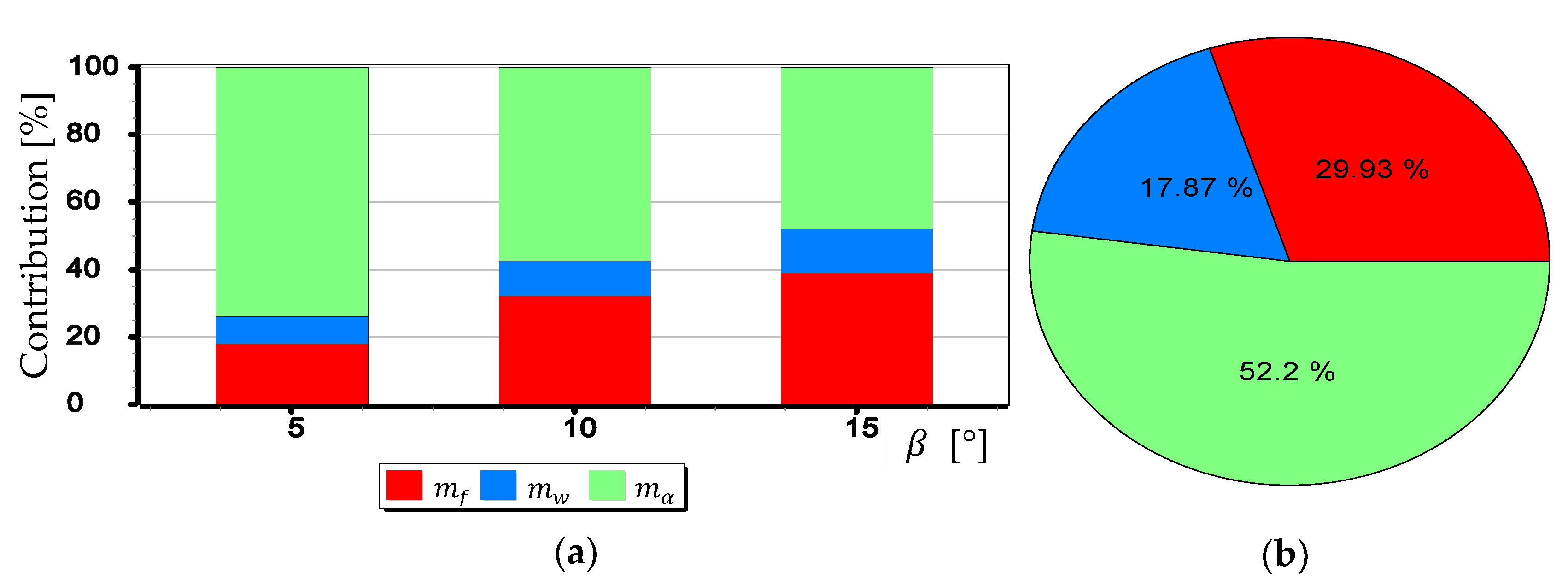
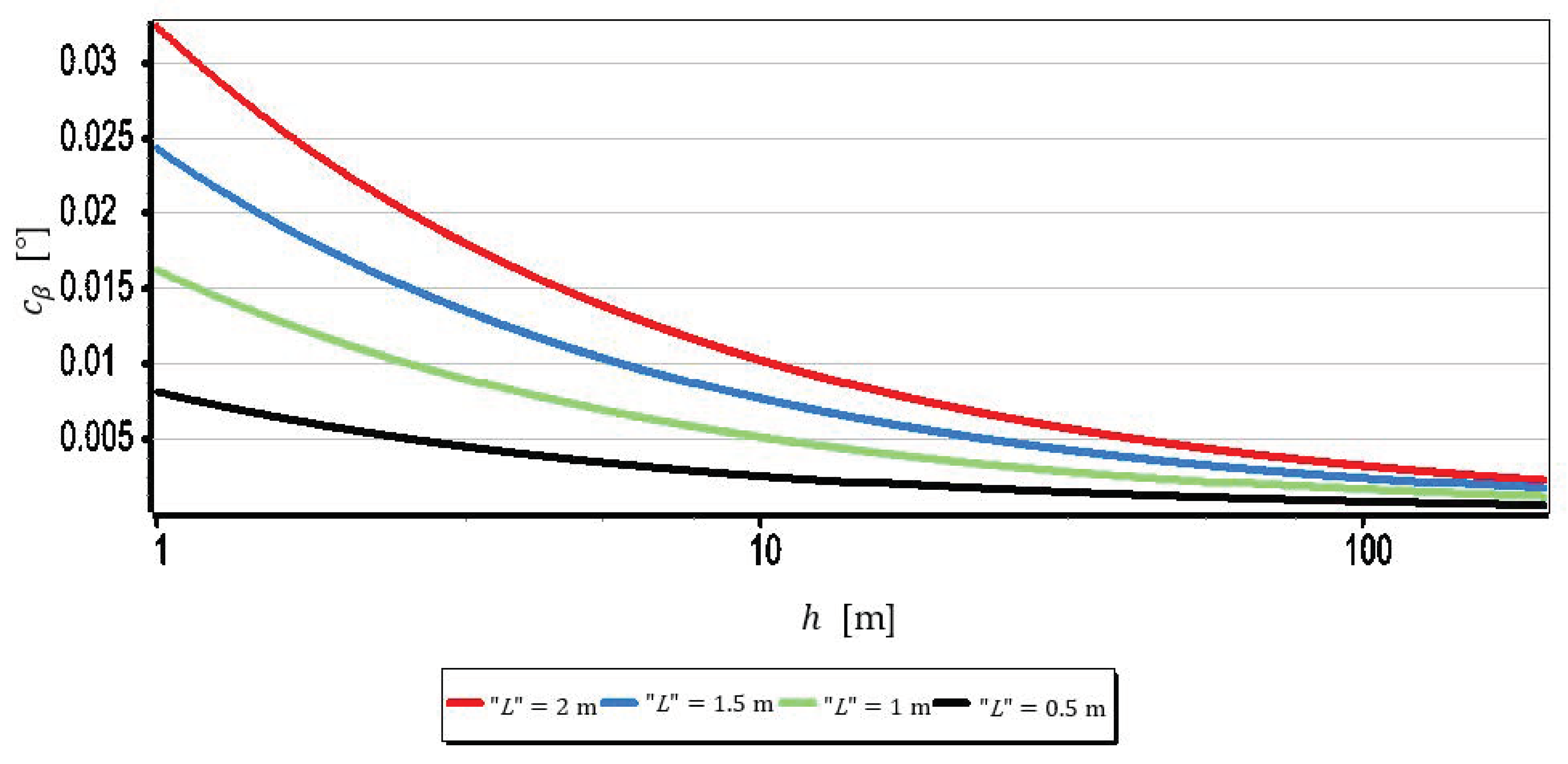
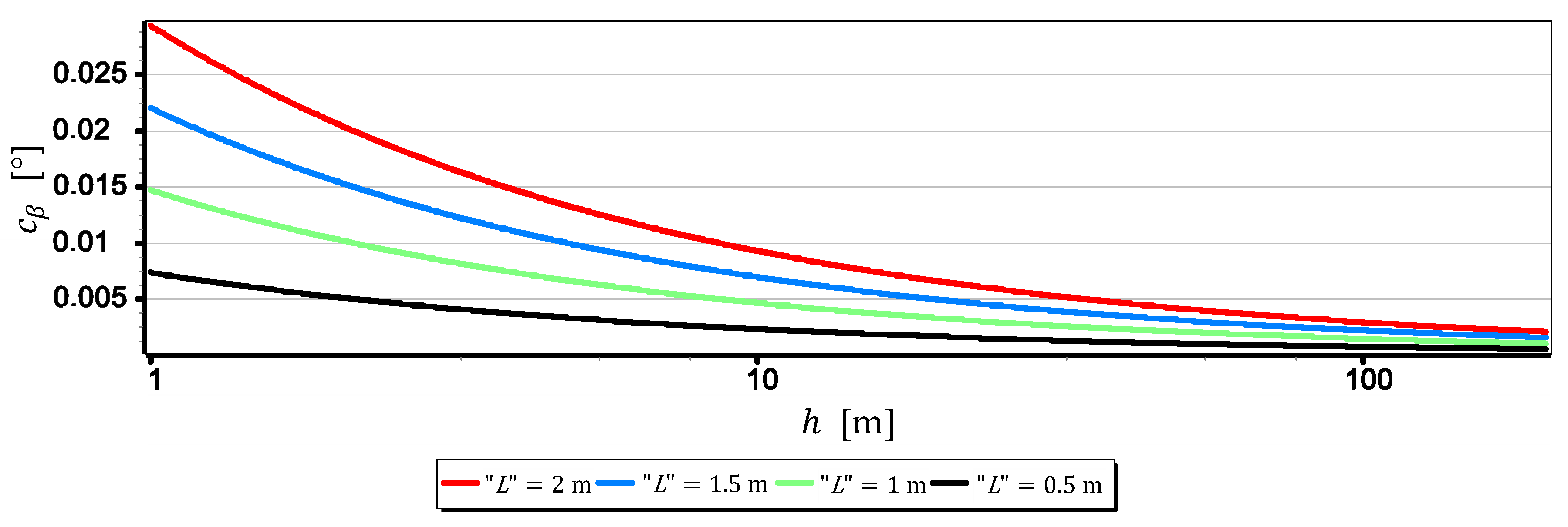
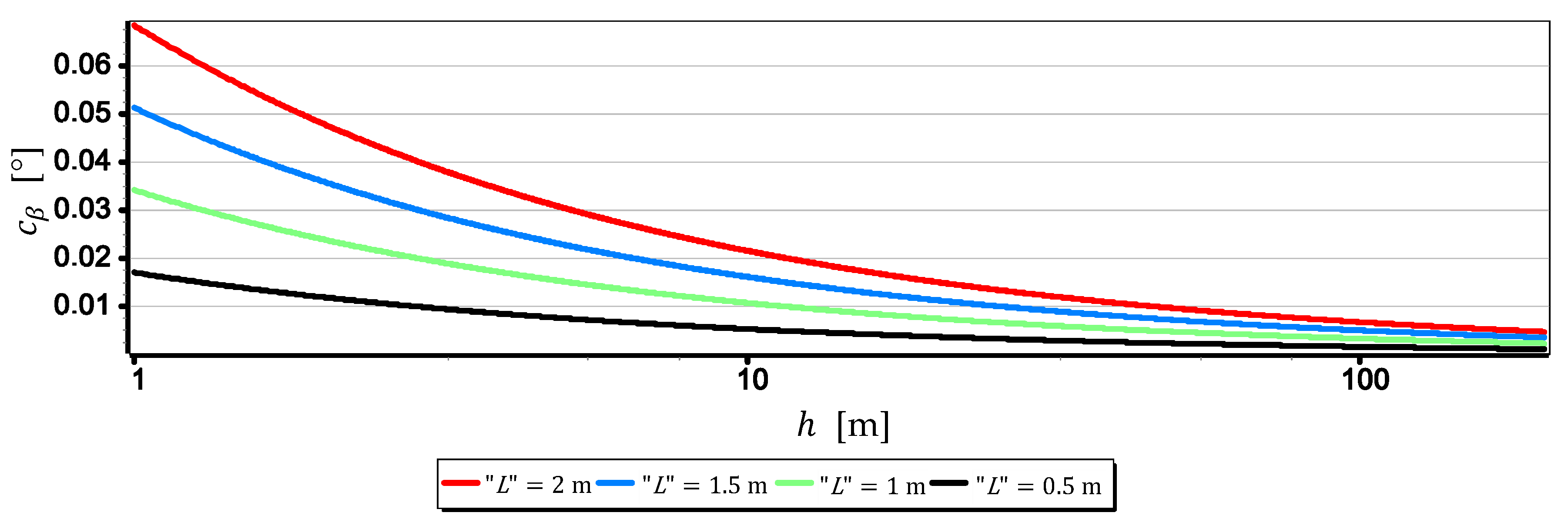
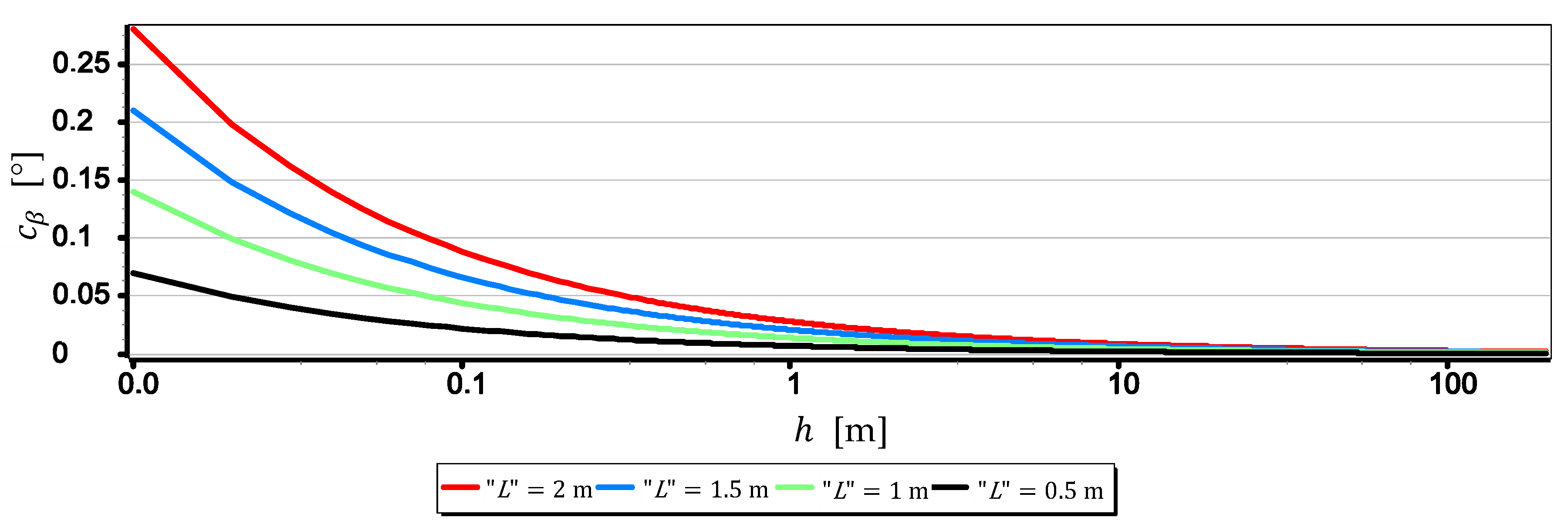
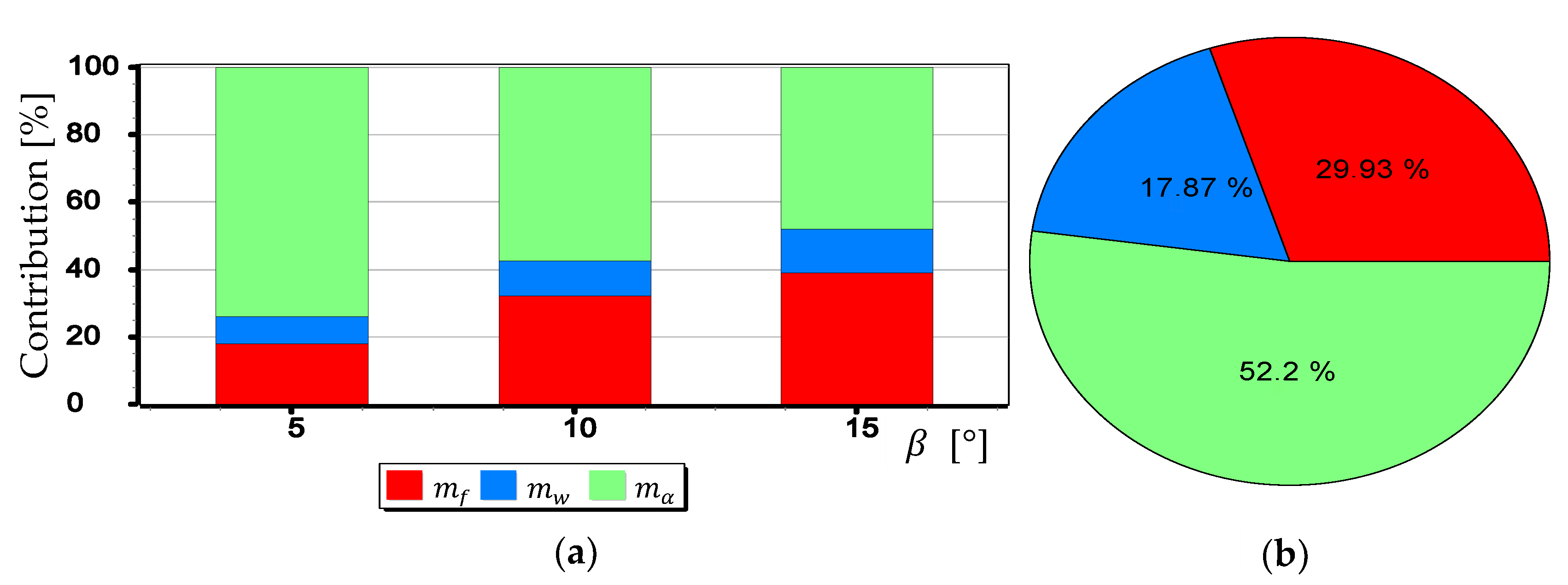
- The mean error of measuring the focal length can have a significant impact on . This applies especially to the use of light cameras with focal lengths of short length , when the ratio to is relatively high (it reaches the value of the order of thousandths by a millimeter). Measurements of the tilt angle β with such cameras for μm (this is a high accuracy of focal length measurement) will be made with which is increased by a minimum of 0.03.
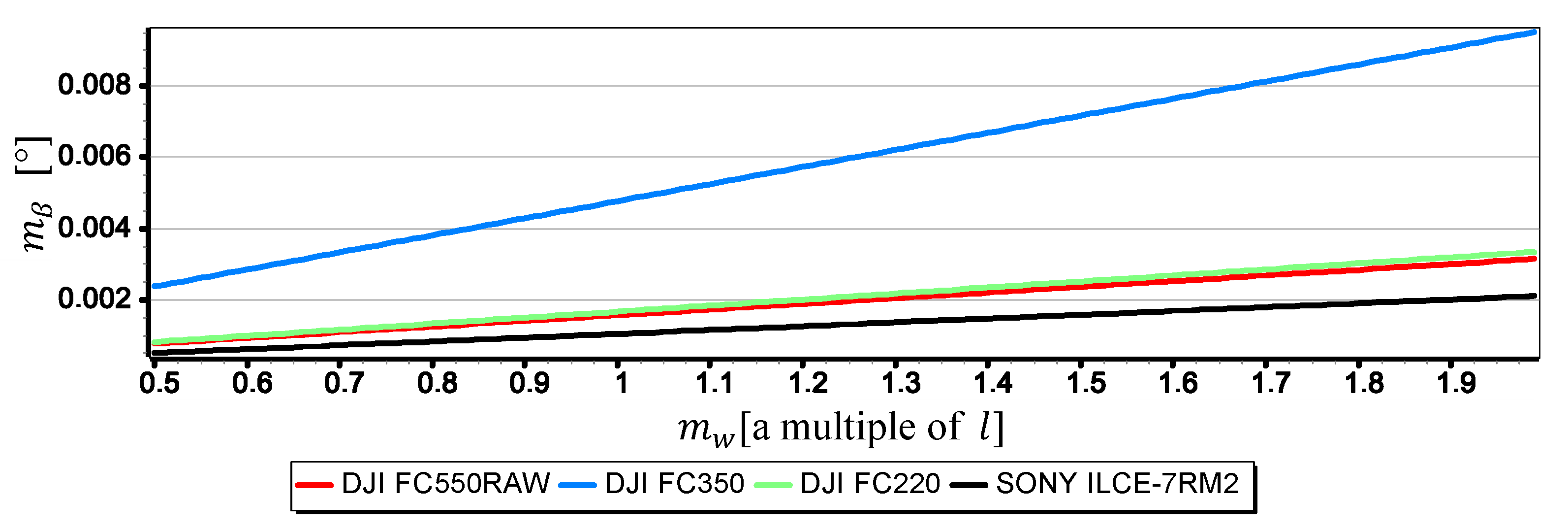
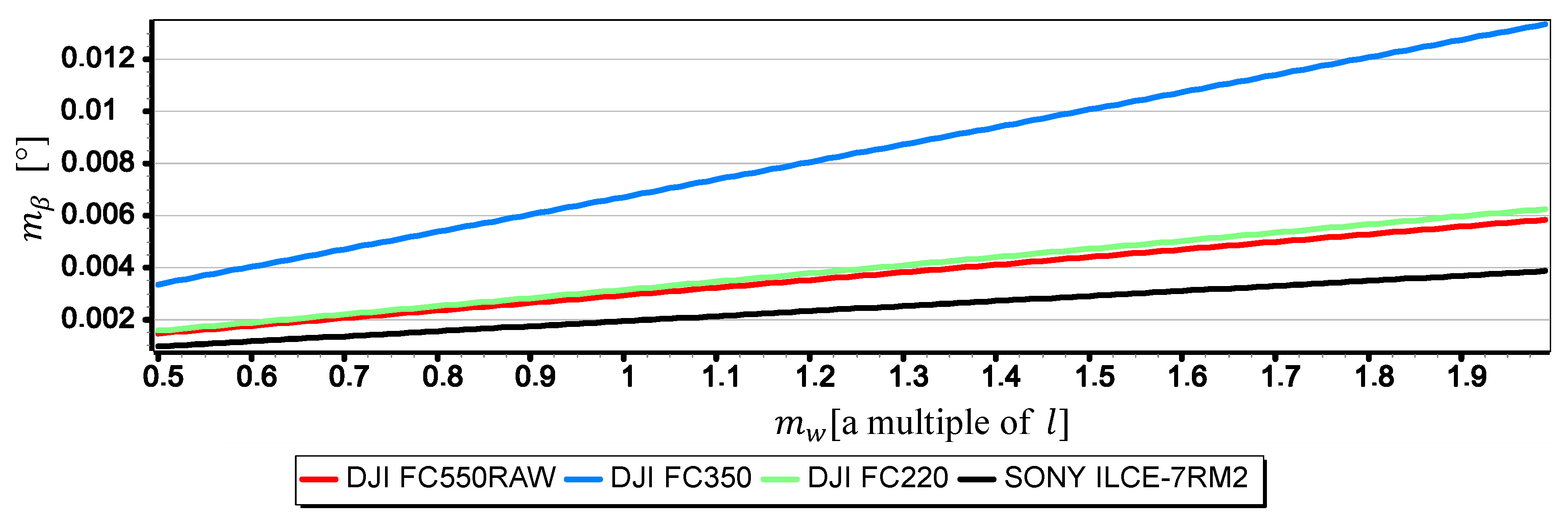
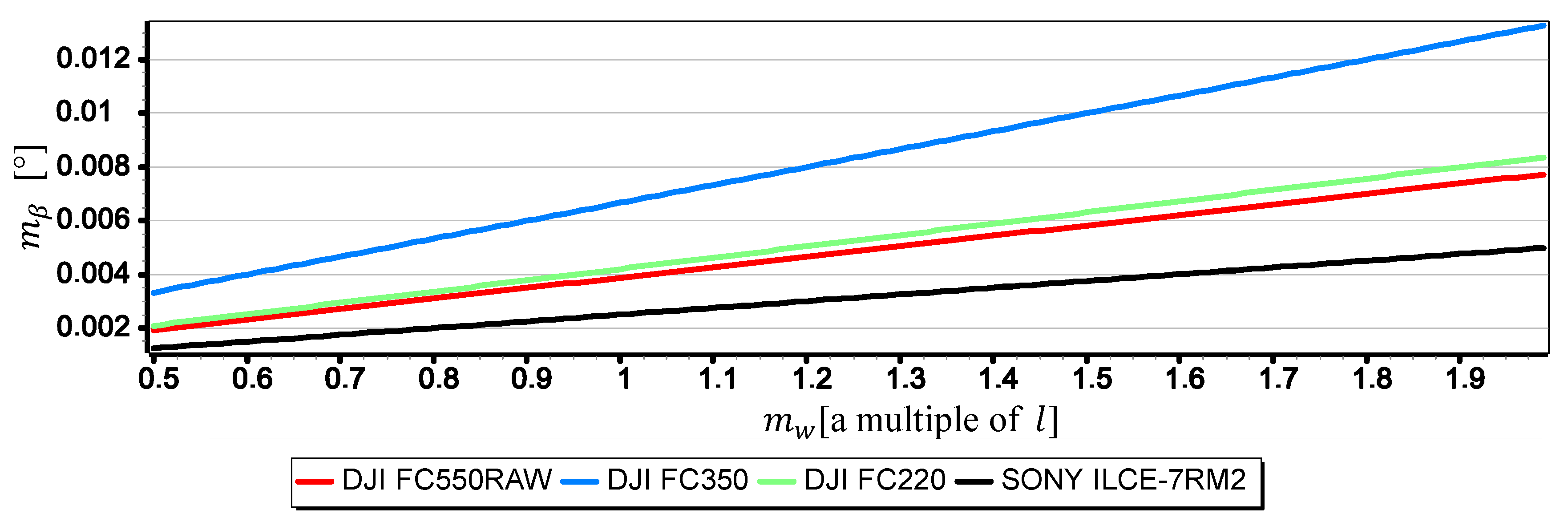
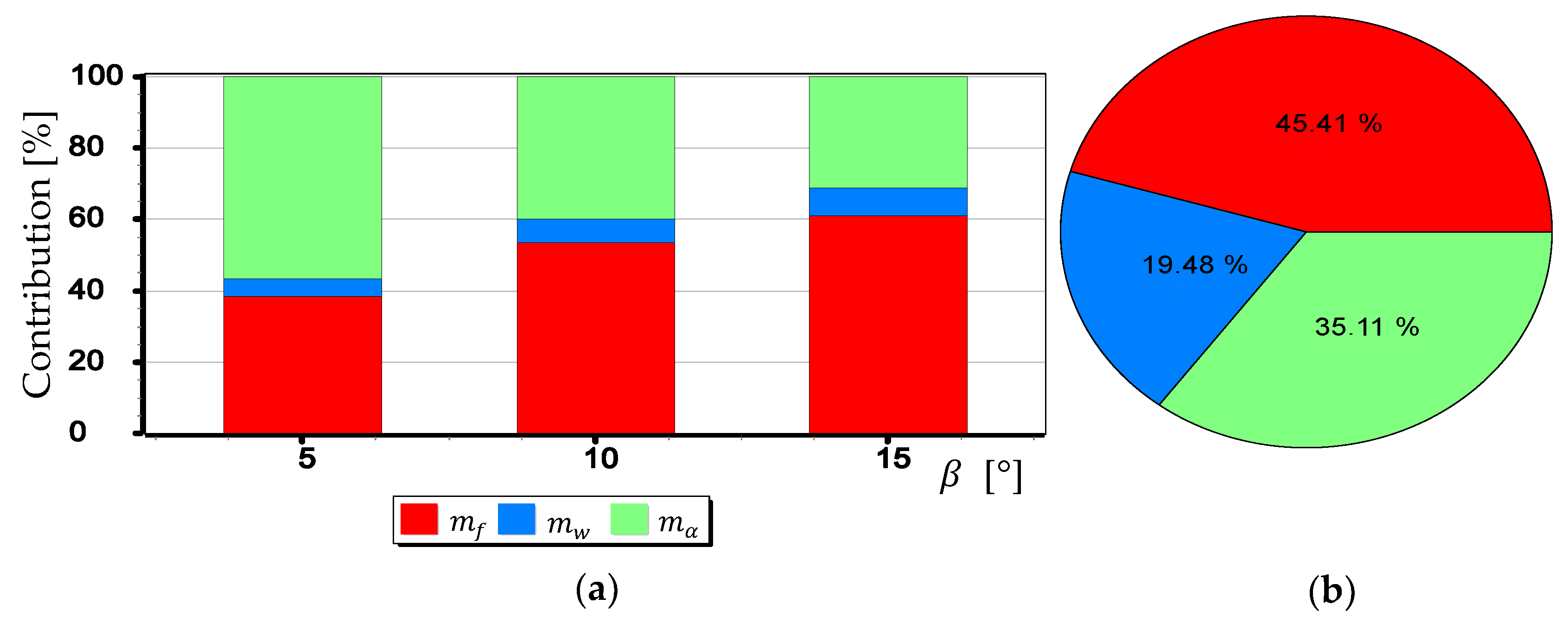
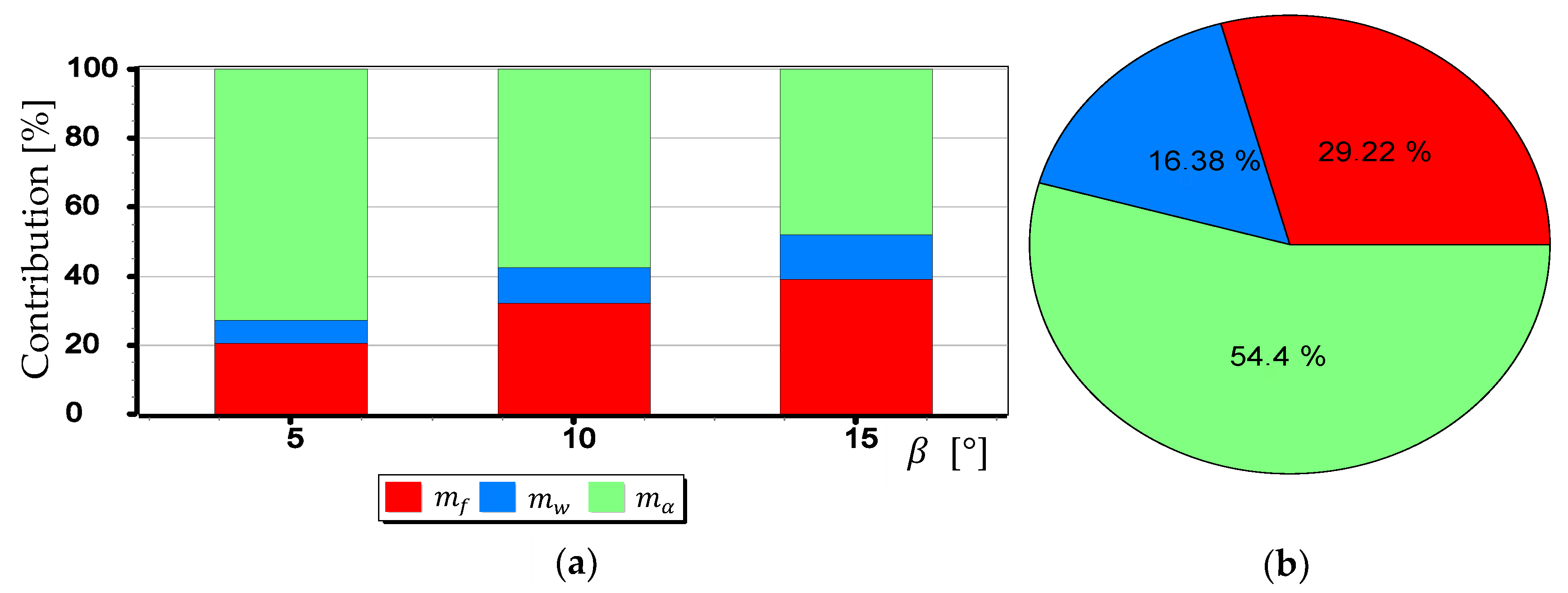
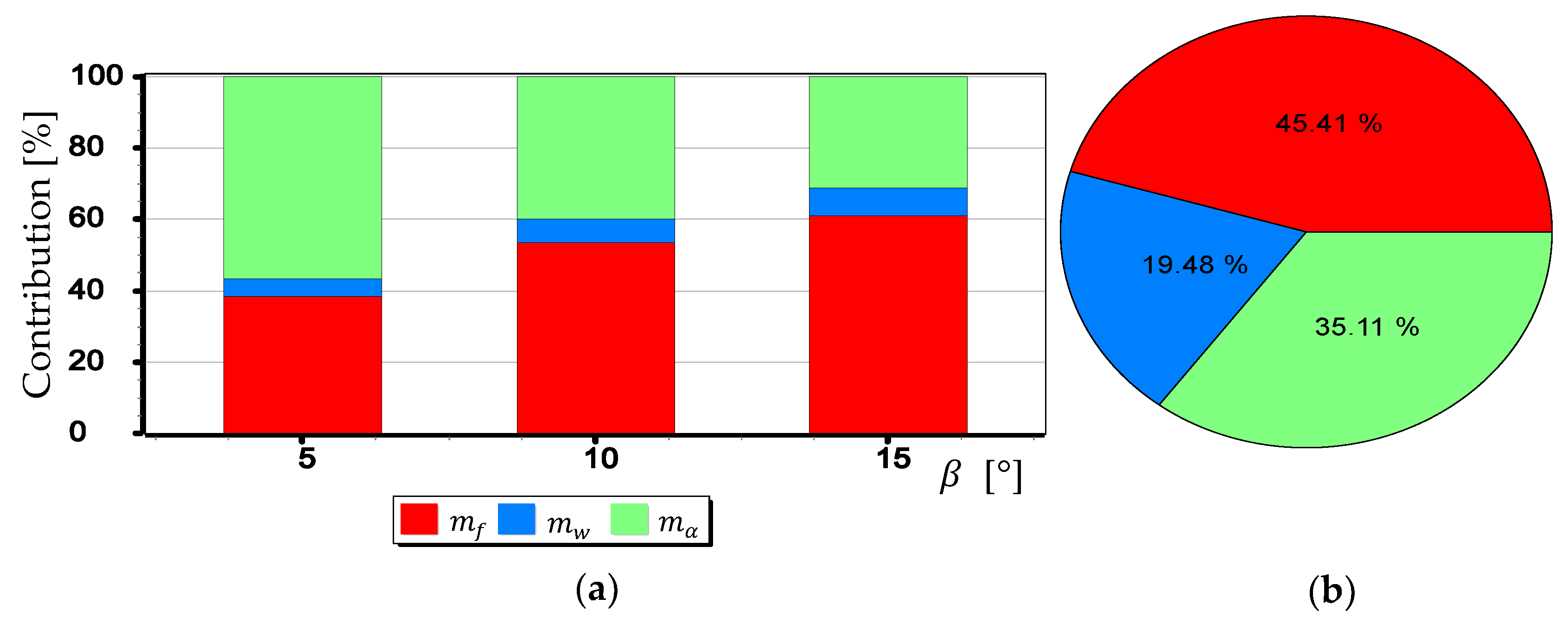
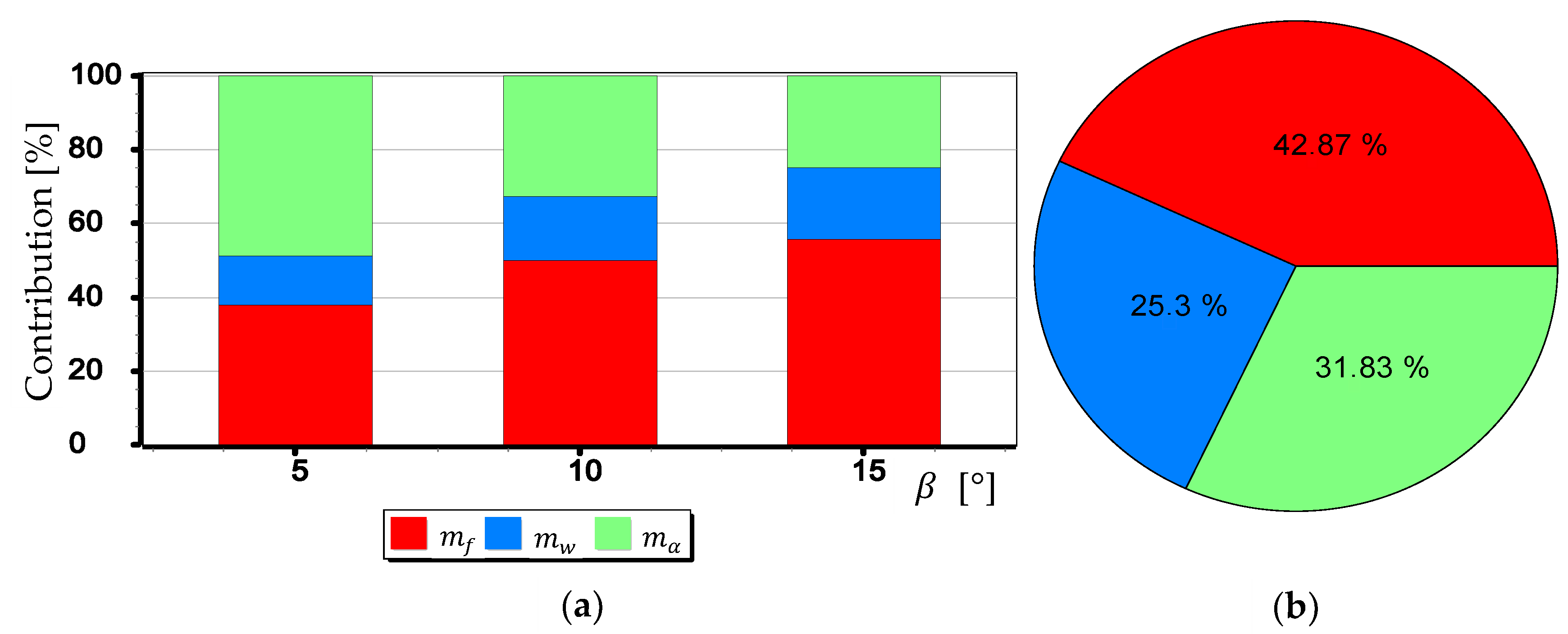
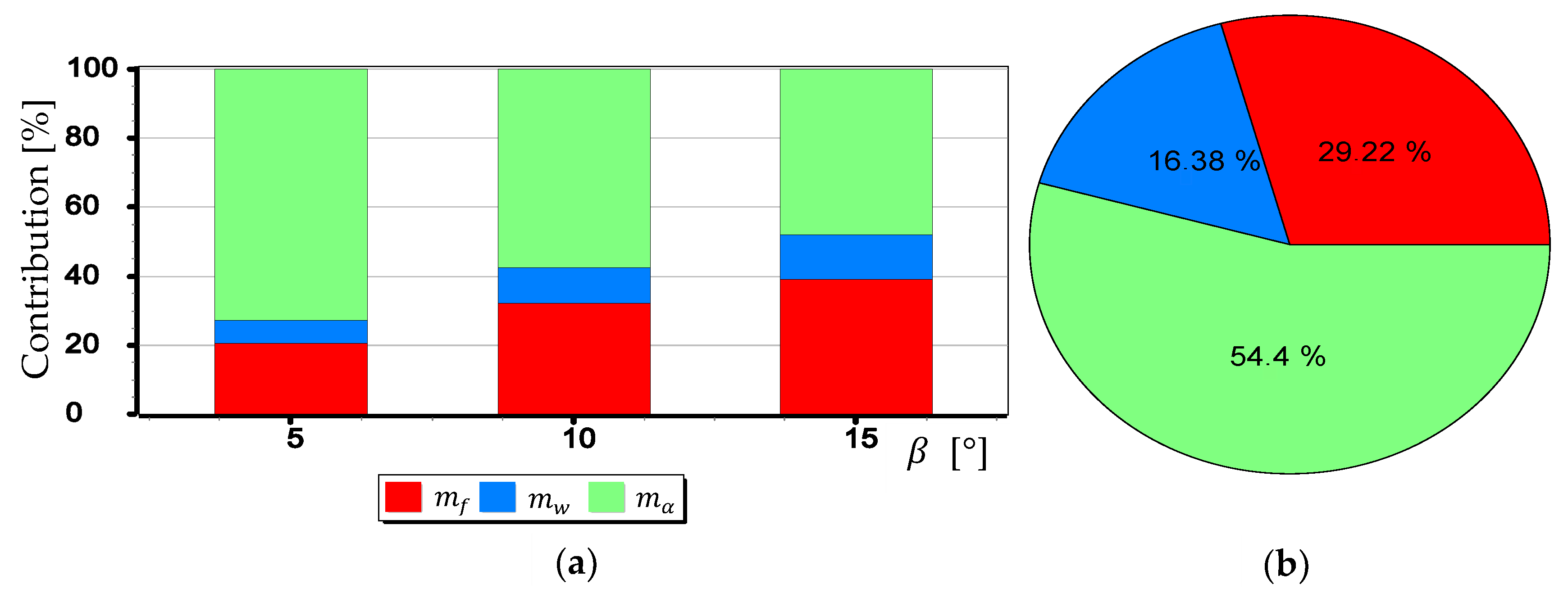
- can also have a significant impact on . This applies in particular to the use of larger cameras with focal lengths and matrices with sizes exceeding 4/3′′. The results of measurements with such cameras may be affected by error up to 70% dependent on . For small tilt angles -below 5° the value of can increase by up to several hundredths of a degree.
- The obtained values of the mean error of measurement of the horizon slope for the tested cameras are slightly higher than INSs used on USV, but much smaller than INSs used on UAV [9,10,11,12]. Therefore, measuring the pitch and roll of bathymetric surveying vehicles using a camera can be considered reasonable. Although, it must be realized that there are other more important factors affecting the accuracy of optical measurement: lens distortion, diffraction limited, motion artifact and lowering of the visibility-omitted in the tests.
- -
- adaptation of recording and image processing equipment to marine conditions (including various external lighting and lighting from the water table),
- -
- appropriate selection of image processing methods with emphasis on changes in visibility (caused by fog, rainfall or snowfall),
- -
- conducting several verification tests of the compensator prototype in a real environment (to find, remove or minimize the so-called critical functions of technology),
- -
- in the longer term, the methods for its use will be developing, including using for stabilization of UAV or USV spatial orientation, relative positioning (e.g., in relation to floating navigational marks or seabed), or for precise determination of the direction and distance to the floating surface object or underwater object (optically, as well as supporting the work of navigation devices such as: sonar, radar or LiDAR).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Naus, K.; Makar, A. Movement disruptions compensation of sounding vessel with three nonlinear points method. Rep. Geod. 2005, 1, 25–32. [Google Scholar]
- NOAA. Department of Defense World Geodetic System 1984, Its Definition and Relationships with Local Geodetic Systems; National Imagery and Mapping Agency: Springfield, VA, USA, 2005; pp. 1–175. [Google Scholar]
- Zhou, Z.; Li, Y.; Zhang, J.; Rizos, C. Integrated Navigation System for a Low-Cost Quadrotor Aerial Vehicle in the Presence of Rotor Influences. J. Surv. Eng. 2016, 143, 05016006. [Google Scholar] [CrossRef]
- Ricci, L.; Taffoni, F.; Formica, D. On the Orientation Error of IMU: Investigating Static and Dynamic Accuracy Targeting Human Motion. PLoS ONE 2016, 11, e0161940. [Google Scholar] [CrossRef] [PubMed]
- Du, S.; Sun, W.; Gao, Y. MEMS IMU Error Mitigation Using Rotation Modulation Technique. Sensors 2016, 16, 2017. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wu, W.; Jiang, O.; Wang, J. A New Continuous Rotation IMU Alignment Algorithm Based on Stochastic Modeling for Cost Effective North-Finding Applications. Sensors 2016, 16, 2113. [Google Scholar] [CrossRef] [PubMed]
- Naus, K.; Makar, A. Usage of Camera System for Determination of Pitching and Rolling of Sounding Vessel. Rep. Geod. 2005, 2, 301–307. [Google Scholar]
- Navsight Marine Solution. Available online: https://www.sbg-systems.com/wp-content/uploads/Navsight_Marine_Leaflet.pdf (accessed on 3 May 2019).
- Positioning and Mapping Solutions for UAVs. Available online: https://www.navtechgps.com/assets/1/7/PrecisionMappingSolutions-UAVs_BRO.pdf (accessed on 3 May 2019).
- RIEGL. Available online: http://www.riegl.com/products/unmanned-scanning/bathycopter/ (accessed on 3 May 2019).
- MATRICE 600. Available online: https://www.dji.com/pl/matrice600?site=brandsite&from=landing_page (accessed on 5 May 2019).
- Ellipse 2 Series. Available online: https://www.sbg-systems.com/wp-content/uploads/Ellipse_Series_Leaflet.pdf (accessed on 5 May 2019).
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef]
- Stateczny, A.; Motyl, W.; Gronska, D. HydroDron—New step for professional hydrography for restricted waters. In Proceedings of the Baltic Geodetic Congress (Geomatics) 2018, Olsztyn, Poland, 21–23 June 2018. [Google Scholar] [CrossRef]
- Szymak, P. Selection of Training Options for Deep Learning Neural Network Using Genetic Algorithm. Proc. MMAR 2019, in press. [Google Scholar]
- Naus, K.; Wąż, M. Accuracy of measuring small heeling angles of a ship using an inclinometer. Sci. J. Marit. Univ. Szczec. 2015, 44, 25–28. [Google Scholar] [CrossRef]
- Bodnar, T. Wybrane metody przetwarzania obrazów do określania orientacji przestrzennej okrętu. Logistyka 2014, 6, 2100–2107. [Google Scholar]
- Gershikov, E.; Tzvika Libe, T.; Kosolapov, S. Horizon Line Detection in Marine Images: Which Method to Choose? Int. J. Adv. Intell. Syst. 2013, 6, 79–88. [Google Scholar]
- Praczyk, T. A quick algorithm for horizon line detection in marine images. J. Mar. Sci. Technol. 2018, 23, 164–177. [Google Scholar] [CrossRef]
- DJI. Available online: https://www.dji.com (accessed on 10 May 2019).
- Urbański, J.; Kopacz, Z.; Posiła, J. Maritime Navigation—Part I; Polish Naval Acad.: Gdynia, Poland, 2018; pp. 23–56. [Google Scholar]
- Distance to the Horizon. Available online: https://aty.sdsu.edu/explain/atmos_refr/horizon.html (accessed on 10 May 2019).
- Brocks, K. Die Lichtstrahlkrümmung in Bodennähe. Tabellen des Refraktionskoeffizienten, I. Teil (Bereich des Präzisionsnivellements). Dtsch. Hydrogr. Z. 1950, 3, 241–248. [Google Scholar] [CrossRef]
- Stober, M. Untersuchungen zum Refraktionseinfluss bei der trigonometrischen Höhenmessung auf dem grönländischen Inlandeis. In Festschrift für Heinz Draheim, Eugen Kuntz und Hermann Mälzer; Geodätisches Institut der Universität Karlsruhe: Karlsruhe, Germany, 1995; pp. 259–272. [Google Scholar]
- Kosiński, W. Geodezja. PWN 2010, 6, 212–214. [Google Scholar]
- Wikipedia. Available online: https://en.wikipedia.org/wiki/Sea_state (accessed on 20 May 2019).
- Liao, L.-Y.; Bráulio de Albuquerque, F.C.; Parks, R.E.; Sasian, J.M. Precision focal-length measurement using imaging conjugates. Opt. Eng. 2012, 51, 1–6. [Google Scholar] [CrossRef]
- DeBoo, B.; Sasian, J. Precise focal-length measurement technique with a reflective Fresnel-zone hologram. Appl. Opt 2003, 42, 3903–3909. [Google Scholar] [CrossRef] [PubMed]
- Angelis, M. A new approach to high accuracy measurement of the focal lengths of lenses using a digital Fourier transform. Opt. Commun 1997, 136, 370–374. [Google Scholar] [CrossRef]
- Sriram, K.V.; Kothiyal, M.P.; Sirohi, R.S. Curvature and focal length measurements using compensation of a collimated beam. Opt. Laser Technol. 1991, 23, 241–245. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Camera and Gimbal | Optical Parameters | |
|---|---|---|
| Camera: DJI FC350 Gimbal: Zenmuse X3 |  | CMOS size: 1/2.3′′ Image size: 4000 × 3000 pixels Focal length: 4–14 mm https://store.dji.com/product/zenmuse-x3-gimbal-camera (accessed on 16 July 2019) |
| Camera: DJI FC220 Gimbal: DJI Mavic Pro |  | CMOS size: 1/2.3′′ Image size: 4000 × 3000 pixels Focal length: 5 mm https://www.dji.com/pl/mavic?site=brandsite&from=landing_page (accessed on 16 July 2019) |
| Camera: DJI FC550RAW Gimbal: Zenmuse X5S |  | CMOS size: 4/3′′ Image size: 4608 × 3456 pixels Focal length: 15 mm https://store.dji.com/product/zenmuse-x5s?site=brandsite&from=buy_now_bar (accessed on 16 July 2019) |
| Camera: SONY ILCE-7RM2 Lens: SAMYANG 35 mm f/2.8 FE Gimbal: Zenmuse Z15-A7 |  | CMOS size: matrix full-frame (35 mm) Image size: 7952 × 5304 pixels Focal length: 35 mm https://www.sony.pl/electronics/aparaty-z-wymiennymi-obiektywami/ilce-7rm2 (accessed on 16 July 2019) http://www.samyang-foto.pl/pl/obiektyw-z-af/af-35mm-f28-fe1 (accessed on 16 July 2019) https://www.dji.com/pl/zenmuse-z15-a7 (accessed on 16 July 2019) |
| Parameter | DJI FC220 | DJI FC350 f = 4 mm/f = 14 mm | DJI FC550RAW | SONY ILCE-7RM2 |
|---|---|---|---|---|
| 0.0168° | 0.0181°/0.0147° | 0.0144° | 0.0081° | |
| 63.27° | 75.19°/24.81° | 59.94° | 53.91° |
| Parameter | DJI FC220 | DJI FC350 f = 14 mm | DJI FC550RAW | SONY ILCE-7RM2 |
|---|---|---|---|---|
| for | 0.2 m | 1.4 m | 0.3 m | 0.3 m |
| for | 0.7 m | 5.4 m | 1.1 m | 4.0 m |
| for | 1.6 m | 12.2 m | 2.4 m | 9.0 m |
| for | 2.8 m | 21.7 m | 4.2 m | 16.0 m |
| Parameter | DJI FC220 | DJI FC350 f = 14 mm | DJI FC550RAW | SONY ILCE-7RM2 |
|---|---|---|---|---|
| for | 0.0250° | 0.01942° | 0.0094° | 0.0044° |
| for | 0.0365° | 0.01905° | 0.0191° | 0.0057° |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naus, K.; Marchel, Ł.; Szymak, P.; Nowak, A. Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image. Sensors 2019, 19, 4644. https://doi.org/10.3390/s19214644
Naus K, Marchel Ł, Szymak P, Nowak A. Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image. Sensors. 2019; 19(21):4644. https://doi.org/10.3390/s19214644
Chicago/Turabian StyleNaus, Krzysztof, Łukasz Marchel, Piotr Szymak, and Aleksander Nowak. 2019. "Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image" Sensors 19, no. 21: 4644. https://doi.org/10.3390/s19214644
APA StyleNaus, K., Marchel, Ł., Szymak, P., & Nowak, A. (2019). Assessment of the Accuracy of Determining the Angular Position of the Unmanned Bathymetric Surveying Vehicle Based on the Sea Horizon Image. Sensors, 19(21), 4644. https://doi.org/10.3390/s19214644