1. Introduction
Autonomous robot navigation needs the existence of a map or representation where the robot can identify its position and the elements concerned with the application to perform. In the luckiest case, the robot will be provided with an a priori map with all the required information. However, in most cases, the robot will not have any prior information of the environment and it will have to build the representation by itself through exploration strategies. Exploration is a fundamental problem to guarantee the autonomy of a robot. It deals with autonomously discovering an unknown area while acquiring the most important information for the desired application. Commonly, exploration and map-building strategies are related as the robot can build a representation of the environment while it explores (although not all of the exploration applications require mapping). An exploration strategy finishes when all the environment is explored or the goal of the application is reached.
Exploration mainly deals with the question: Given the current knowledge of the environment, where should I move next to acquire the maximum information of the unknown environment? One of the most common strategies to answer to this question is Frontier-based exploration [
1] which is also the foundation of most of the current exploration algorithms. The basis of this method are frontiers, which represent the regions on the boundary between open space and unexplored space. This approach proposes that moving to the frontiers the robot will gain as much information as possible.
In this work, we propose a mobile robot exploration algorithm that combines frontier-based concepts with behavior-based strategies for indoor environments. A new frontier selection criterion is proposed based on the acquired geometric, topological and semantic information. Our aim is to autonomously build a topological representation of the environment to be used for further applications. An example of a map using the proposed method is shown in
Figure 1, where the robot autonomously explored and mapped part of Willow Garage office environment. In this work, we focus on structured indoor environments but the method is applicable to more general environments. The main contributions of this work can be summarized as:
Semantic classification of frontiers based on geometric characteristics
A cost–utility function to drive the exploration strategy that takes into account geometric, topological and semantic information
A probabilistic loop closure algorithm that determines when an area is reachable from two different paths
This paper is structured as follows.
Section 2 surveys related work and concepts on exploration strategies. The proposed exploration algorithm is presented in
Section 3; a detailed explanation of the different processes involved in the exploration is also presented. The complementary loop closing algorithm is explained in
Section 4. Finally, the experiments validating the proposed work and the conclusions are presented in
Section 5 and
Section 6.
2. Related Work
Mobile robot exploration has attracted researchers attention since the beginnings of mobile robot developments as it is the way to autonomously build a representation of the environment. First studies on the topic based their representation on acquiring geometric precise information such as Configuration Space [
2], Grid models [
3] or Voronoi models [
4]. Some researchers [
5] noticed that the complexity of the problem increased exponentially as larger environments were considered when dealing with geometric maps and started to represent the information as topological maps. Others used the addition of external markers to help the exploration processes, such as Dudek et al. [
6], who designed a robotic system that could identify, put down and pick up some markers that were used to guide the exploration.
Kuipers et al. [
7] stated that previous works in exploration and map-building represented the environment as a geometrical map and some of them abstracted a topological graph afterwards to reduce computational costs in future stages. They proposed an exploration algorithm that directly obtained the topological representation. This system recognized qualitative properties as distinctive places and travel edges between them leading to a topological representation where geometry is assimilated into local descriptions of places and edges. Other authors also gave importance to topological representations; points of interest were identified as the robot moved in [
8]. A virtual bubble was built around the robot occupying all the space perceived by the robot. The exploration finished when the bubble had occupied all the environment. Points of interest can be understood as a precursor of the frontier concept presented by Yamauchi [
1]. Frontiers are regions on the boundary between open space and unexplored space. Yamauchi proposed that moving to the frontiers the robot will gain as much information as possible. In this first approach to the frontier concept, the selection of the best frontier to move corresponded to the nearest frontier. Frontier-based exploration has become one of the most used and robust exploration algorithms and many authors have based their exploration algorithms in the frontier concept. In [
9], the authors added the information known about navigation and localization to the decision process for the next frontier to visit. Their algorithm maximizes the global utility which consists of information utility (maximize the amount of new information that can be acquired), navigation utility (minimize the displacement to the place) and localization utility (minimize the localization error). Other authors [
10] defined an exploration strategy through multi-objective optimization of separated features where the selected candidate frontier is the one that is nearest to the individual ideal values. In the same direction, in [
11], multiple features are proposed to optimize the decision making process but the selected candidate corresponds to the one that maximizes a global utility function. Amigoni et al. [
12] used frontier-based exploration to build geometric maps. In [
13,
14], comparisons of different exploration strategies are presented. In both works, the authors concluded that, depending on the application, the decision would vary but generally frontier-based exploration using only cost (moving to the nearest frontier) requires less time. On the contrary, using cost and utility, such as the work in [
15], extensive knowledge of the environment is acquired more quickly, which is important in rescue and surveillance tasks.
Meanwhile, other authors worked on improving behavior-based approaches for exploration. In [
16], a topological map called navigation chart containing the actions to move between distinctive places is presented. In [
17], the authors presented a behavior-based control approach to build a topological map that establishes connections between rooms. A topological exploration strategy is also presented in [
18], in which the behaviors are grouped in node detection, node matching and edge travelling using a Voronoi diagram.
Recently, other exploration strategies have been proposed, such as the work presented by Fermin-Leon et al. [
19,
20], where rooms are identified by topological segmentation of contours. Each room or region is associated with a node and they used Tarry maze-searching [
21] algorithm to move through the environment. In [
22], the authors proposed an exploration and rescue method based on Partially Observable Markov Decision Processes which directly incorporates uncertainty in the decision process. In [
23], a multirobot exploration algorithm in which each robot auctions for the next positions to reach is presented. Based on the observed part of the environment, the system estimates the outer border of the environment by the convex hull of the observed map and infers the structure of the unknown area. In [
24], random next best views are connected through a RRT algorithm. The selection of the next best view is performed with regards to the amount of visible unmapped area and with a penalization for high costs. This work deals with 3D mapping and 2D surface inspection and shows a better performance of RRT exploration compared to frontier-based exploration for fine-grained, complex and detailed mapping. However, in house or office environments, frontier-based exploration obtained a faster result.
Many recent works have presented variations of the frontier-based exploration algorithm. In [
25,
26], the authors developed a frontier exploration algorithm where the function to chose the best candidate depended on the localizability and uncertainty based on entropy. This algorithm leads to a conservative exploration strategy that maintains a good uncertainty value through loop closure and revisiting poses. Some works [
27,
28] have focused on frontier-based exploration to perform navigation in an unknown environment. In these works, robots do not build a representation of the environment or completely explore the environment, rather they collaboratively reach their desired positions within the environment. In [
29], a method for online mapping through Gaussian Processes occupancy maps (GPOMs) is proposed. An algorithm to extract probabilistic frontiers from GPOMs is used as frontier detection. Frontier selection is performed based on information gain and path length, but just considering geometric information. They showed higher performance than standard frontier-based exploration for big indoor environments. Lately, frontier exploration has also been applied to multirobot exploration establishing a routing priority for the frontiers and the robots [
30]. Other works with multirobot frontier exploration have also added semantic and scene information to the decision process in order to separate the trajectories of the robots [
31] or to obtain a higher reward of certain kind of areas [
32]. However, these methods only used semantic information for the exploration process and built grid maps where these information is not included.
In this work, an exploration strategy is presented that differentiates from the previous works in that it builds a lightweight and efficient map representation that contains geometric, topological and semantic information. This same information is taken into account to lead the exploration strategy and determine possible loop closures. Semantic information is considered with regards to the traversing of transit area and it is included in the decision process through the cost–utility function. The exploration algorithm combines frontier-based concepts with behavior-based strategies for indoor environments. The purpose of this work is to improve the efficiency with regards to distance travelled and execution time, to increase the robustness of exploration algorithms dealing with large environments and to build a lightweight topological representation of the environment that includes all the geometric, topological and semantic information for further navigation.
3. Exploration Algorithm
The exploration algorithm proposed in this work is based on the frontier concept presented originally by Yamauchi [
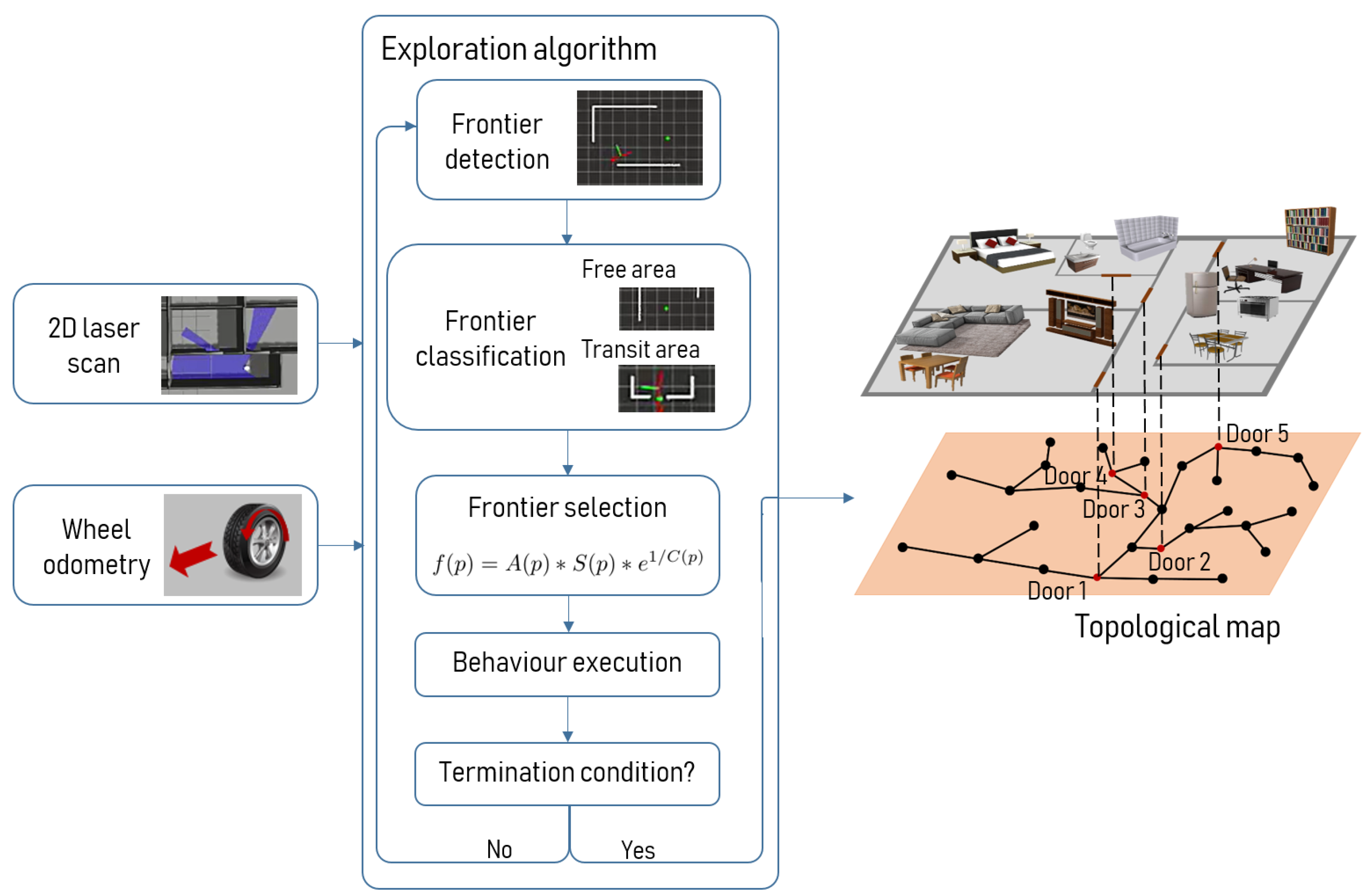
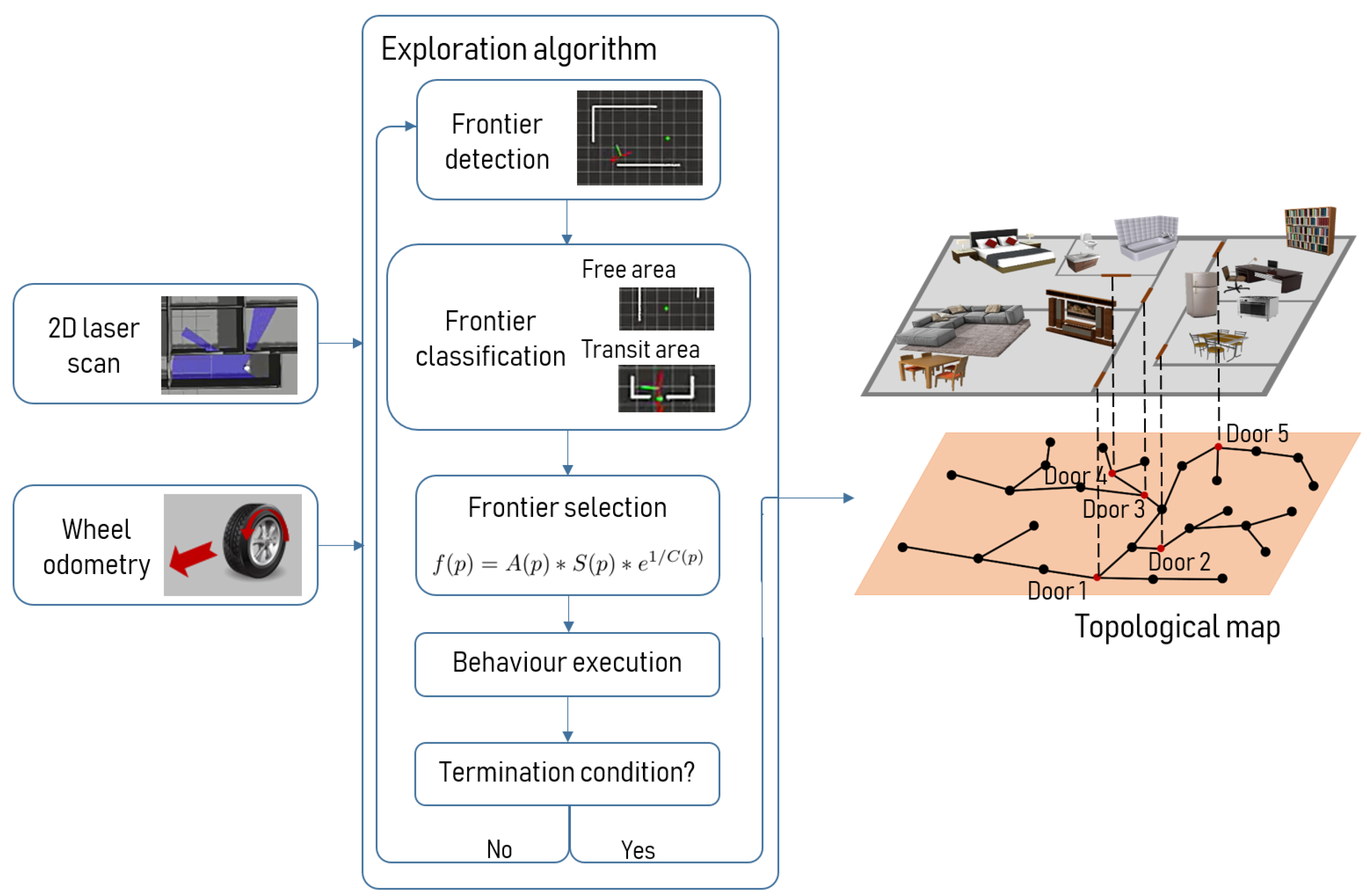
1]. According to that work, a frontier is a region on the boundary between free space and unknown space and moving to the frontiers the robot gains the maximum information for each movement. In our work, the first step for the robot is to detect the frontiers and decide where it is going to move to. A frontier is semantically classified as free area or as transit area depending on geometric information. Transit areas are defined as the frontier where the robot changes between two places (places can be rooms, roads, floors, etc.) and regardless of the size of the transit area the information gain that they offer is significant. This semantic information, along with the cost of moving to each frontier and the estimated utility, is used to determine the next best frontier. The robot is now ready to move to the desired position. To do so, it executes the behaviors corresponding to the current situation, as explained in
Section 3.4. This process is executed iteratively until the termination condition is reached. The termination condition in our case is defined as the absence of interesting frontiers to visit, as explained in
Section 3.5. Once the exploration algorithm has finished, the topological map according to the free space of the environment is completely built and can be used for further navigation. This process is illustrated in the diagram presented in
Figure 2. Sensor information from a laser, a camera and wheel odometry are used as inputs to the system. When the exploration process has reached the termination condition, the topological map of the whole environment is available for further operations.
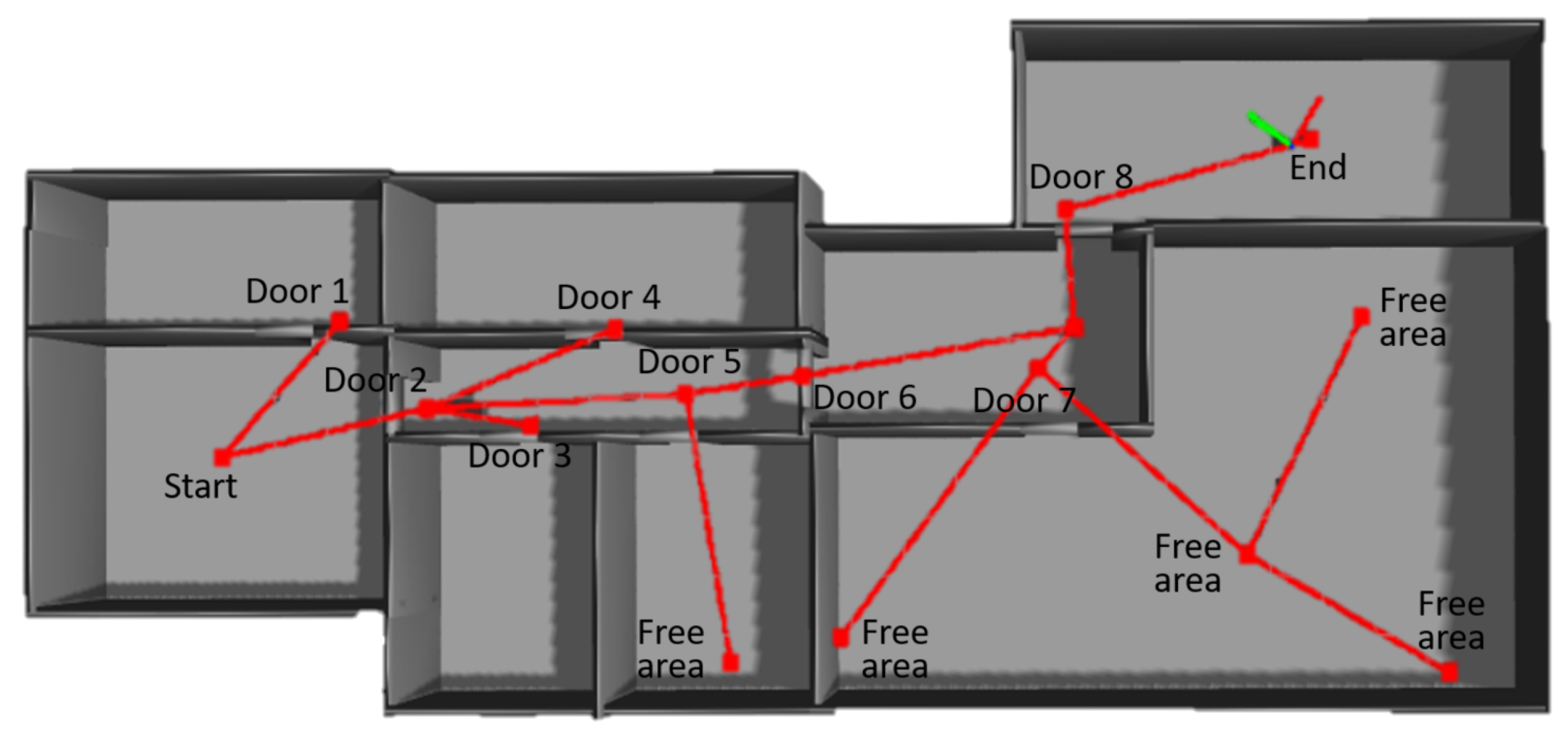
The purpose of this work is to give the capabilities to a robot to autonomously explore and build a representation of indoor environments, such as the one shown in
Figure 3. This representation includes all the information that the robot has acquired from the environment. One of our aims is to use this algorithm in the future to help elderly people as a robot can learn the structure of their house and help them in daily-life activities. In the following subsections, each step for successfully performing the exploration algorithm is explained: frontier detection, frontier classification, frontier selection, the behavior-based strategy to reach the selected frontier and the termination condition that determines when the environment is fully explored.
3.1. Frontier Detection
Frontier detection is the process of detecting the boundaries between free-known space and unknown space. To perform this detection, the robot is equipped with a 2D laser sensor (Hokuyo URG-04LX). This sensor covers the surrounding area with a maximum radius of 5 m approximately. We consider that every group of laser measurements is a frontier if one of the following:
The value of all the measurements corresponds to the maximum range value. This means that in that direction there is no obstacle in the seen region.
It represents a significant gap between measurements. Even though range values do not reach the maximum value, it is possible to have occlusions between obstacles which are recognized through a significant difference between consecutive scans.
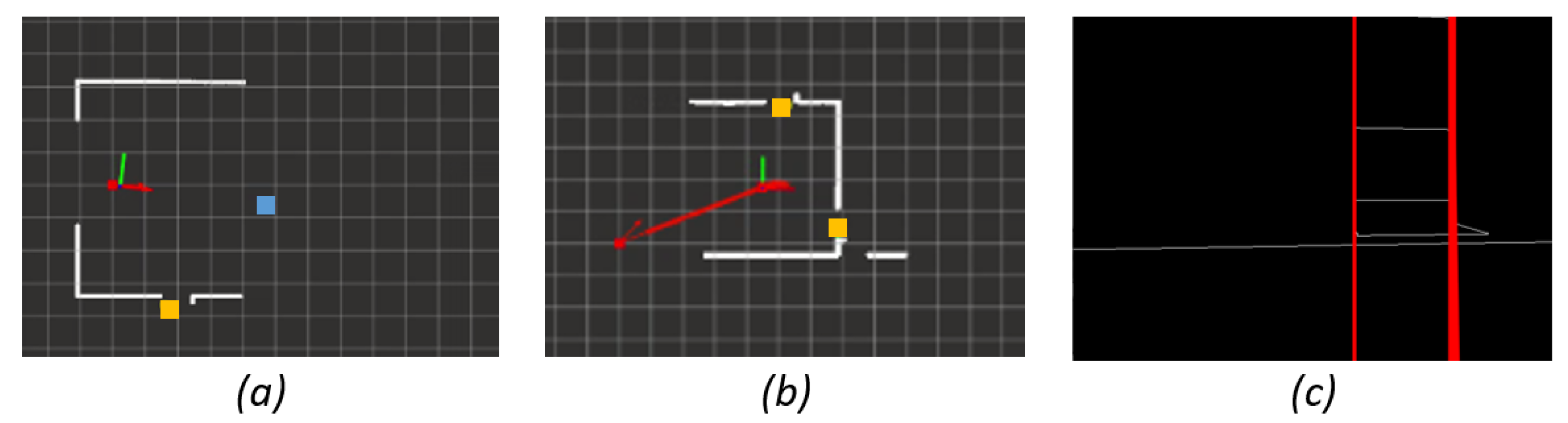
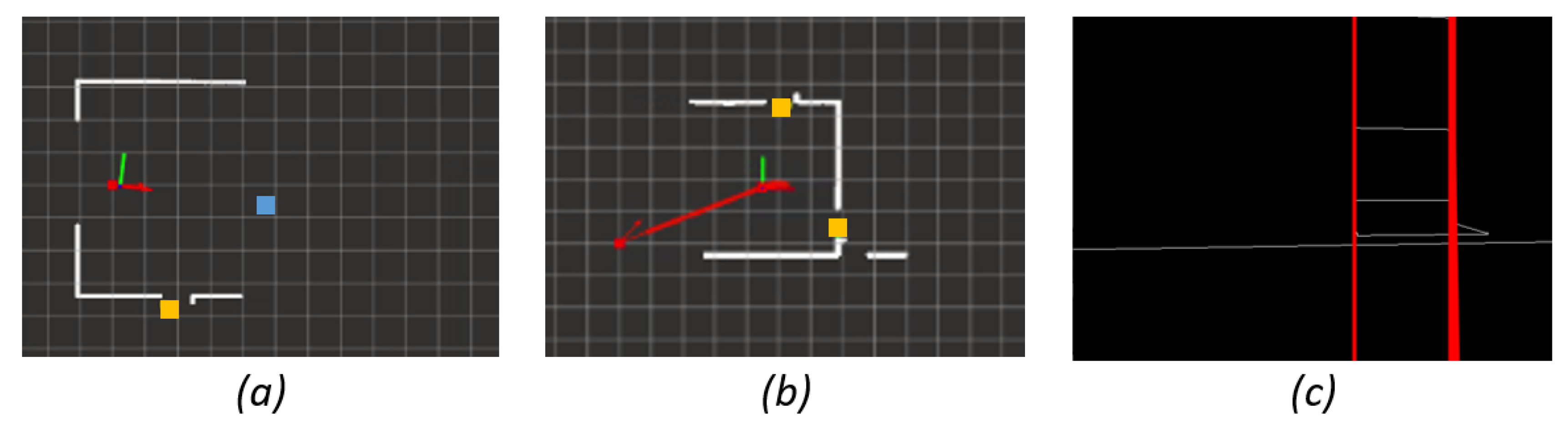
Once the frontiers are detected, we characterize them using the middle point (position to be reached afterwards) and the size of the frontier (that corresponds to the geometric utility). In
Figure 4a,b, different frontiers have been detected and the position to be reached within the frontier is marked with a square.
3.2. Semantic Frontier Classification
Frontiers are semantically classified as free area or as transit area based on their geometric characteristics. In this work, transit areas are identified with doors (but they could be defined differently for other approaches or environments). Free areas relate to frontiers within a room and transit areas relate to frontiers that connect to different rooms (doors).
A preliminary door detector has been developed in this work, in which only the geometric characteristics obtained from the laser and a depth camera are taken into account. For a frontier to be considered a door, its size must correspond to a typical doorway between two coinciding segments. In
Figure 4a,b, the robot identified three frontiers characterized as transit area or door (yellow) and one as free area (blue). In addition, in
Figure 4b, an example of a frontier where there is a gap between measurements is shown. In this case, although the wall across the door is detected, the frontier is considered as the doorway. Once the laser information selects a gap as a possible door, camera information is used to confirm that hypothesis. A simple vertical line detector using Hough Transform was implemented. Vertical lines must be found close to the door frame in order to finally consider that gap as a door. In
Figure 4c, the detection of the door frames of a door is shown.
Behaviors to check and confirm that a frontier detected as a transit area is really a transit area are executed in order to solve the misclassification that could occur in corners or dead-ends. As explained in
Section 3.4, these behaviors are approaching to the center of the door and stopping 90 cm before reaching it. From that new position, the door detection algorithm is run again and it will confirm or discard that the frontier is a transit area.
Frontier classification was executed from 50 different random positions leading to the results shown in
Table 1.
The results obtained show the good performance of the classifier in the detection of doors considering the high percentages of accuracy and sensitivity. In 92.98% of the cases, the classifier detects the doors correctly. In addition, the misclassification rate is quite low, only 7.02%. Failing situations were mainly due to dead ends or corners and sharp angles to doors.
This semantic classification between free and transit areas plays an important role in the exploration algorithm as it is one of the key points for the decision process.
3.3. Frontier Selection through Cost–Utility Function
A cost–utility function is implemented to decide the next best frontier to be visited. A cost–utility function is defined as the function that the system tries to maximize as it represents the most optimal value. In this case, the cost–utility function,
f(p) for a given frontier
p, is shown in Equation (
1) and results from the combination of:
The geometric utility, A(p), corresponds to the size of the frontier. Bigger frontiers will offer a bigger range to acquire new information of the environment.
The semantic utility, S(p), gives a semantic importance to the transit areas. Despite its small size, transit areas open to a new space that will make the robot gain valuable new information.
The topological cost,
C(p), refers to the topological distance that the robot will have to travel to reach the frontier. This cost is associated to the connectivity between frontiers. Consecutive frontiers will have a cost value of 1. However, if to reach one frontier the robot has to pass by other frontiers, its cost value will correspond to
, where
n is the number of frontiers to cross.
In Equation (
1), different utilities are related linearly, whereas between utility and cost the relation is a reverse exponential. Using this relation, we are penalizing the transitions that are not directly connected to the current frontier, as they imply path planning and several transitions. As observed in
Table 2, there is a great penalization between cost value 1 (0%) and cost value 2 (39.35%) to avoid excessive path-planning and revisiting of nodes. Among higher costs, lower penalization increments are applied as the cost increases (as once the robot is performing path planning, the number of revisited nodes is not so determining). This effect is due to the reverse exponential related to the cost.
The main advantage of the cost–utility function proposed in this work is that it balances between distance and information gain. Information gain is considered with regards to frontier size and type. This can lead to situations where, although having small adjacent frontiers to visit, the robot plans a path to a more distant frontier that offers greater information gain.
The cost–utility function is calculated at each exploration iteration for each possible unvisited frontier and the best frontier corresponds to the one that maximizes the cost–utility function.
Section 3.1,
Section 3.2 and
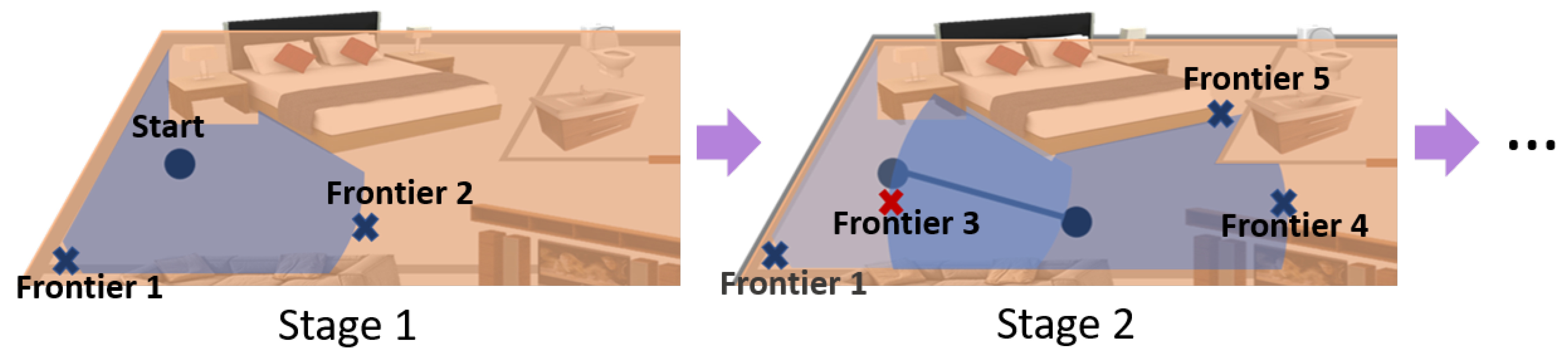
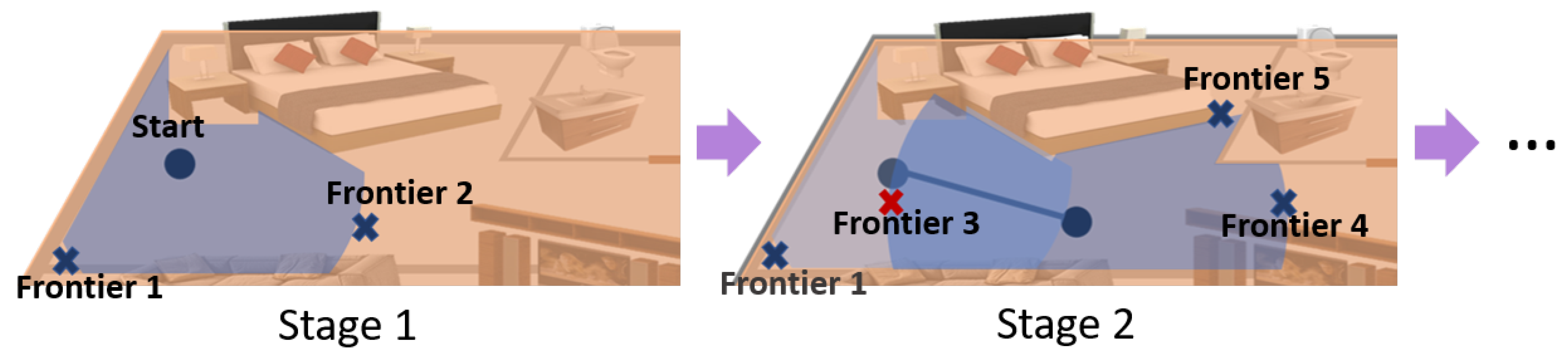
Section 3.3 can be summarized as the sequence presented in
Figure 5. From a starting position, the robot seeks for the best option to start exploring the environment. Two frontiers have been detected and semantically classified as free area. Both frontiers are placed at a cost value of 1 and the geometric utility of Frontier 2 is much bigger than the one of Frontier 1. For this reason, in the first stage, the robot decides to move to Frontier 2. When the required position for that frontier is reached the second exploration stage starts. The robot detects three new frontiers. Frontier 3 is discarded as it corresponds to an already-visited area and Frontiers 4 and 5 are evaluated along with Frontier 1 that was not explored in the previous stage. Frontier 1 has a cost value of 2 and the new frontiers a cost value of 1. In addition, Frontier 4 opens to a much wider area, thus Frontier 4 will be the next one selected to explore. This sequence will continue until the termination condition is met.
3.4. Behavior-Based Exploration Strategies
The robot can perform three different behaviors to fulfill the exploration process. The behaviors implemented are Move to next best view, Approach transit area and Cross transit area. Move to next best view behavior is performed for frontiers classified as free area and it reaches the middle point of the next best frontier. Approach transit area and Cross transit area are performed for frontiers classified as transit area. The robot first performs Approach transit area, which consists on moving towards the middle point of the frontier but stopping 90 cm before reaching it. When that approaching position has been reached, the robot checks that it is effectively a transit area, executing again the door detection algorithm. If the transit area has been checked, the behavior Cross transit area is executed. It moves the robot through the transit area and beyond until it has entered the new room. If the transit area has been discarded, a new frontier to visit is sought. Each behavior requires different speed and precision conditions.
When the next best frontier is situated in a topological cost higher to 1, prior to executing the required behaviors the robot has to plan the path to reach the next best frontier. This path planning is performed using Dijkstra path planning algorithm that finds the shortest path between the known nodes of the environment and executes the corresponding behaviors for each of the nodes it has to traverse.
3.5. Termination Condition
The termination condition of the algorithm is the absence of any interesting frontier to visit. A frontier is considered interesting if its cost–utility value is higher than an experimentally defined value. If none of the remaining possible frontiers has a cost–utility value higher that the minimum considered interesting. the algorithm finishes. This procedure avoids long time explorations that lead the robot to areas that do not add extra information of the environment (such as corners or small dead-ends).
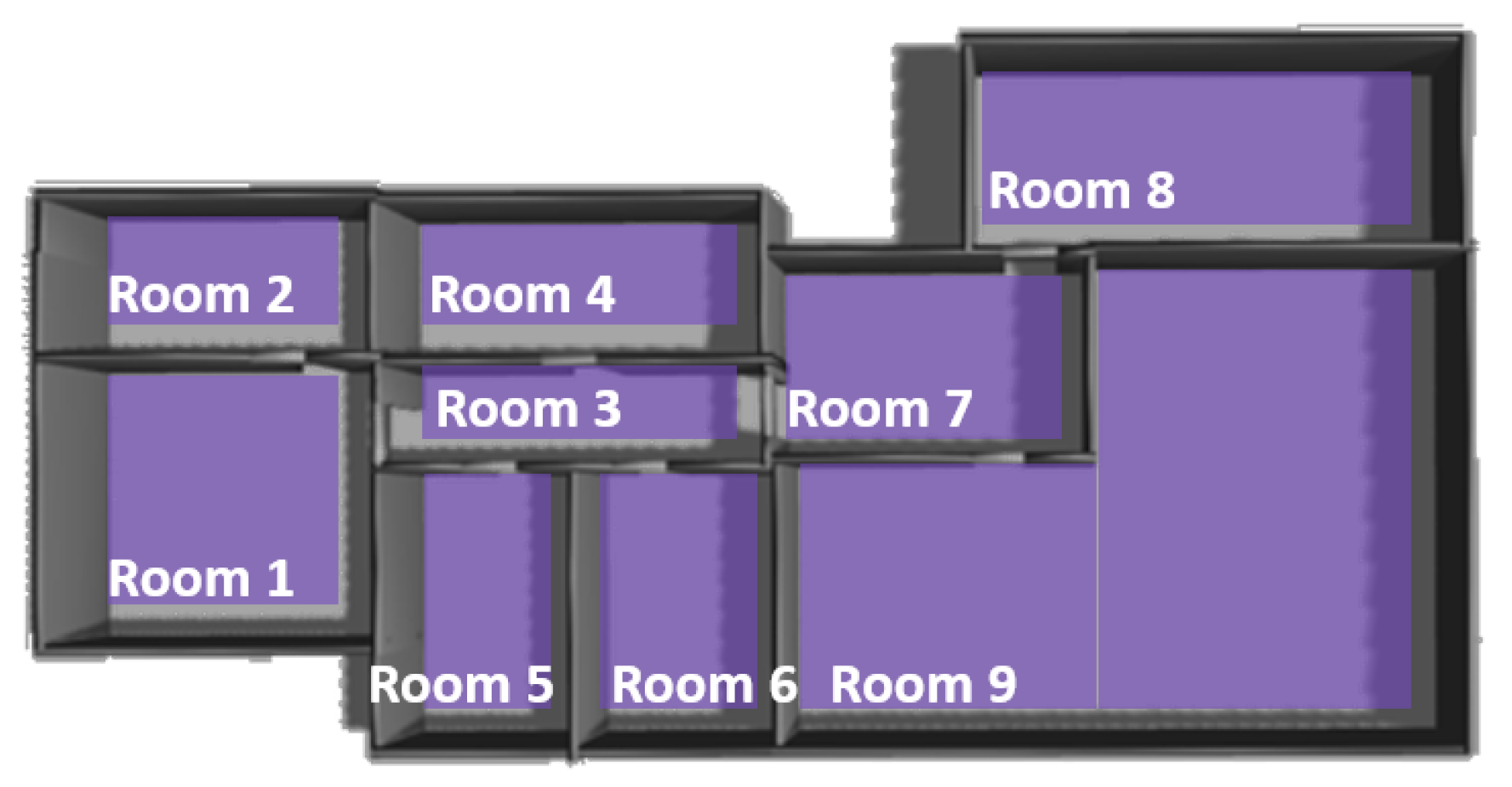
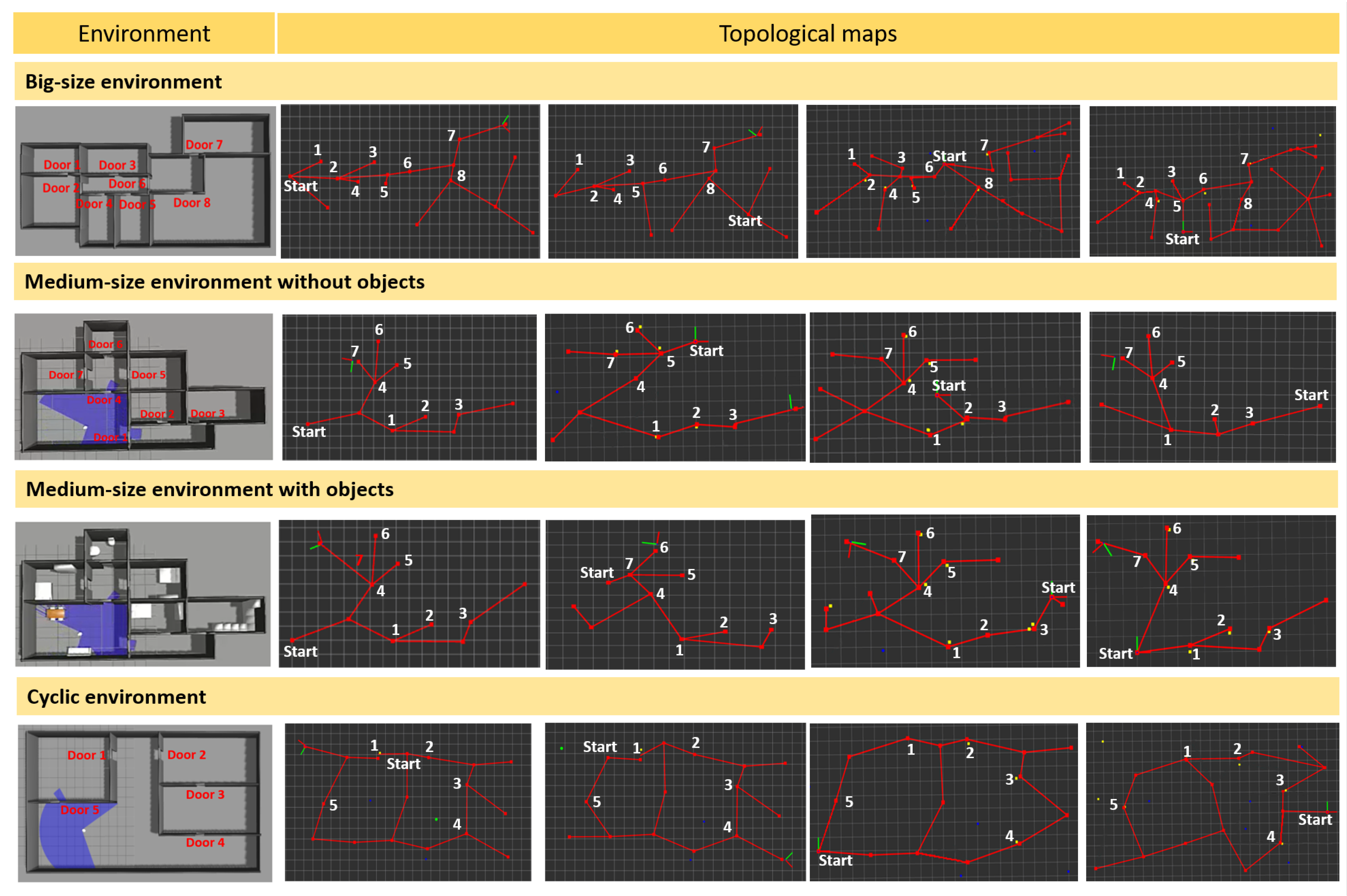
The minimum interesting function value has been determined experimentally in the simulated indoor environment shown in
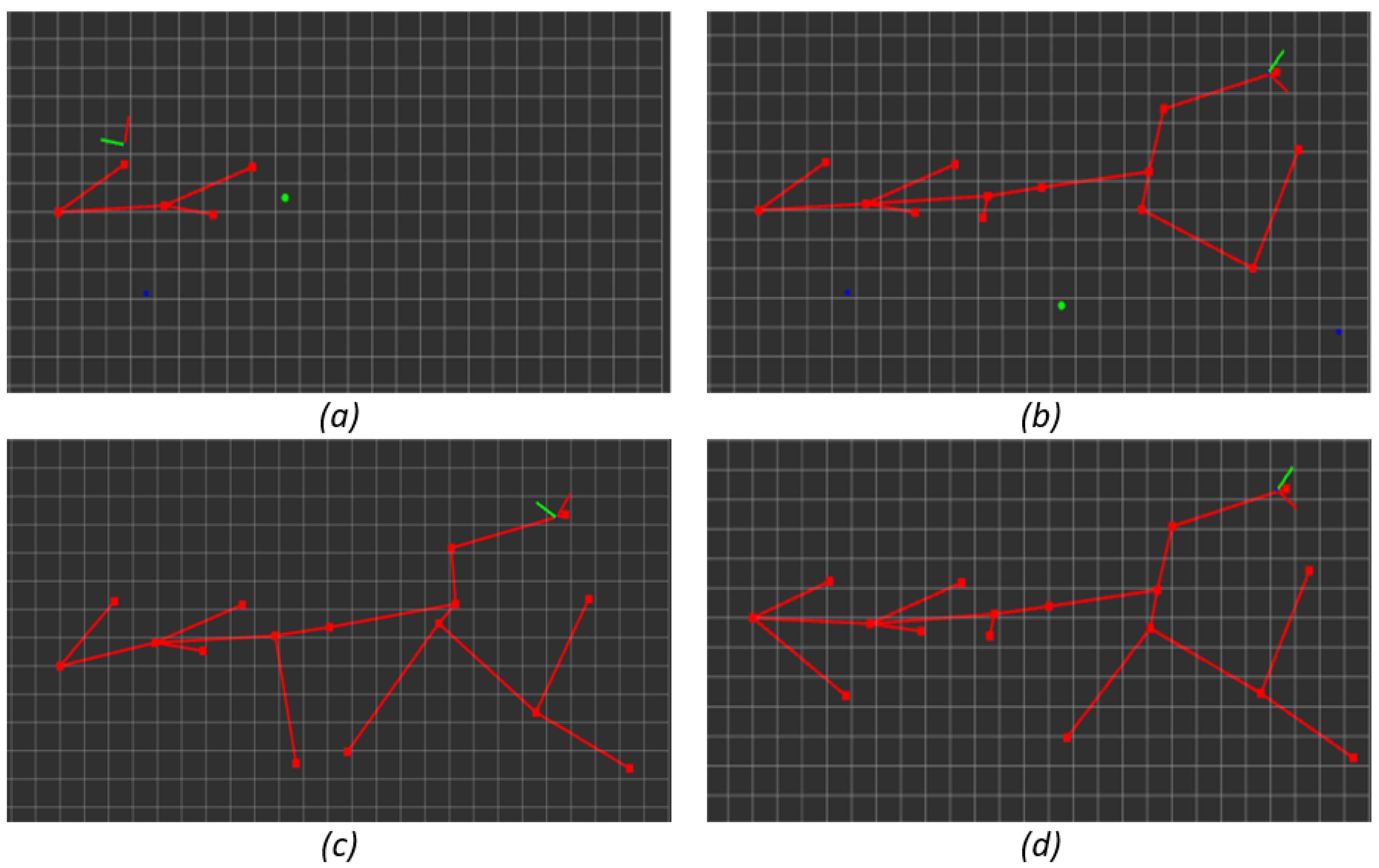
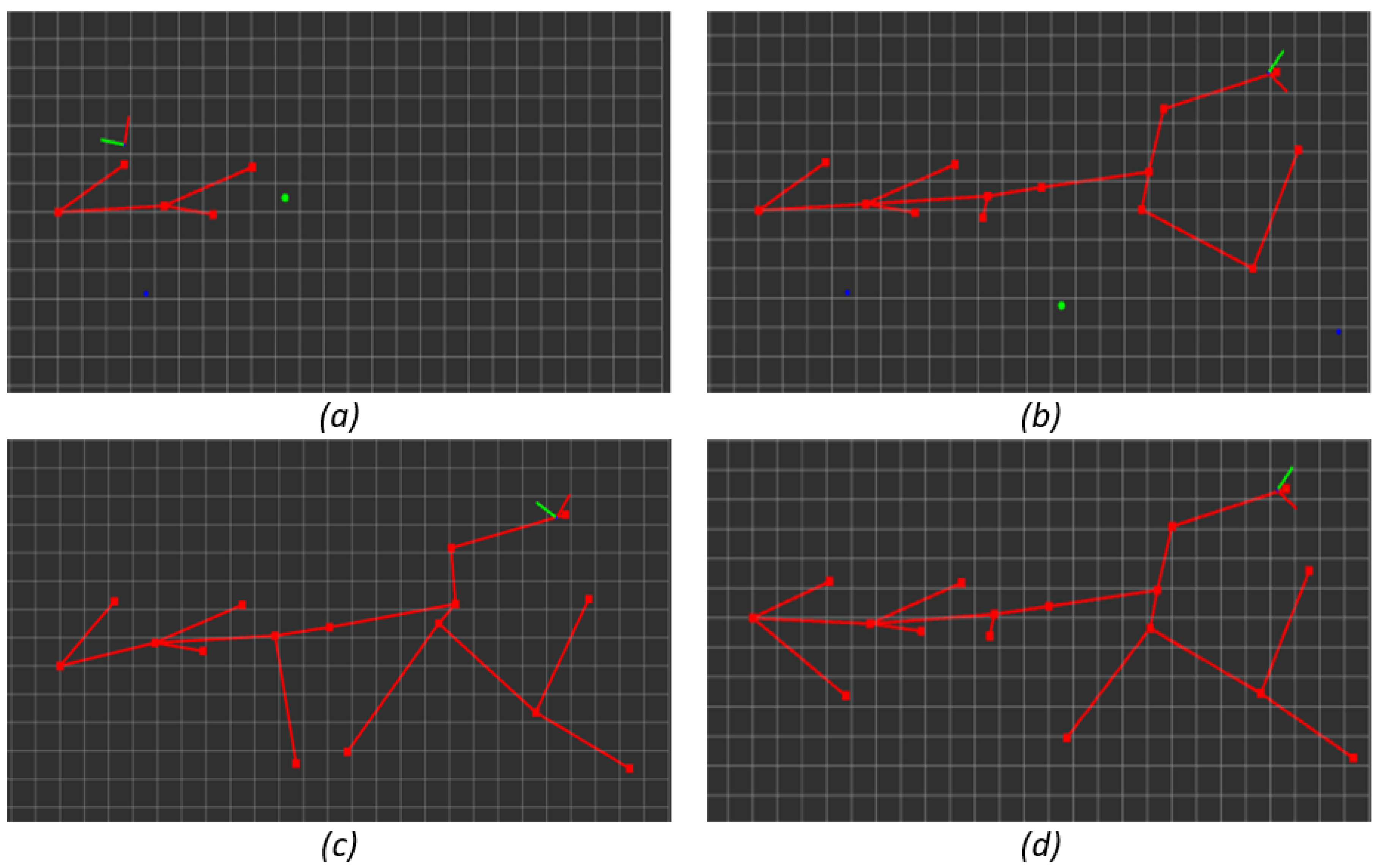
Figure 3 in order to determine the highest value that allows full exploration of the environments without over-exploring it. The chosen value for the minimum interesting function is the same for the all experiments shown in this paper. In
Figure 6, the resulting topological map for different minimum interesting function values is shown.
Figure 6a was performed with a minimum value of 80;
Figure 6b with a minimum value of 40;
Figure 6c with a minimum value of 30; and
Figure 6d with a minimum value of 10.
Some of the differences can be observed at first sight, for example it is obvious that the exploration for
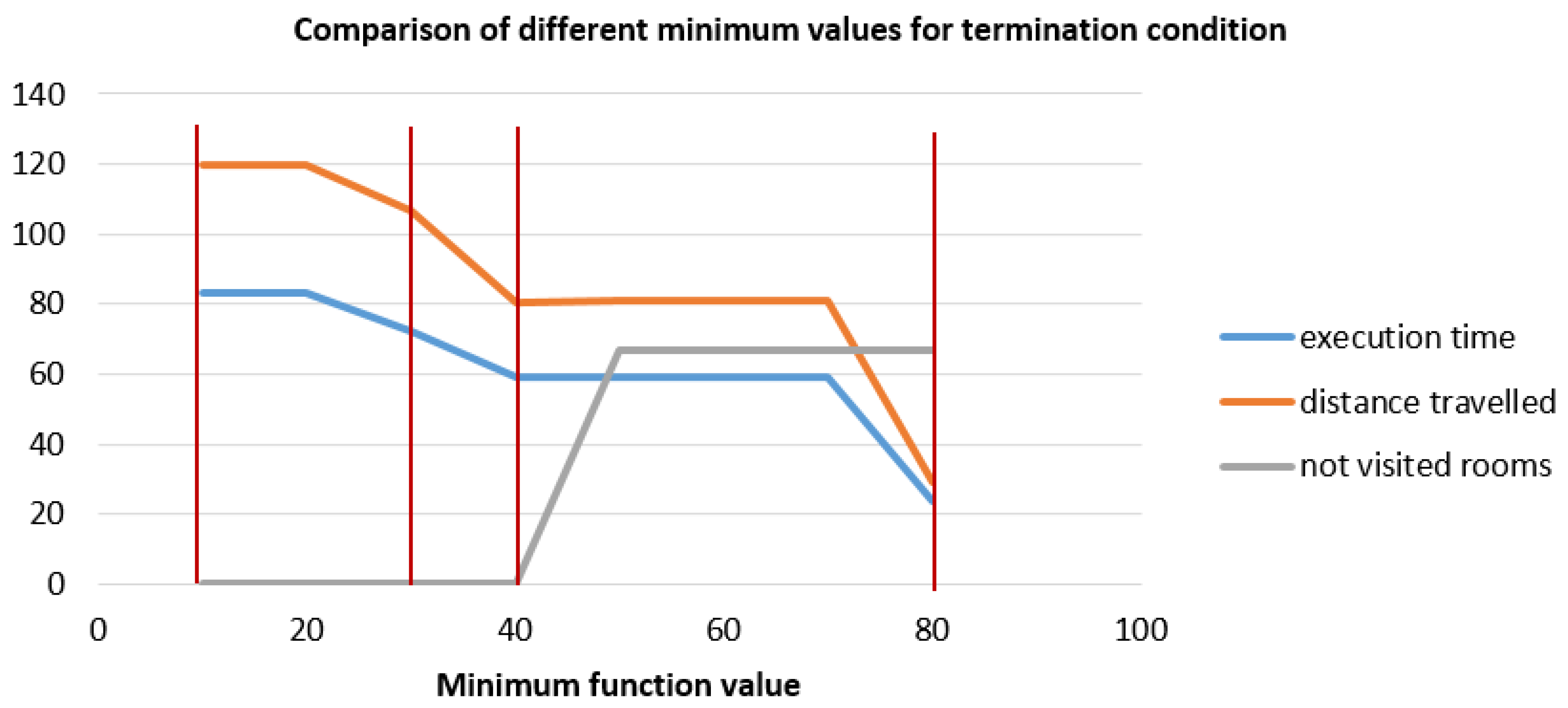
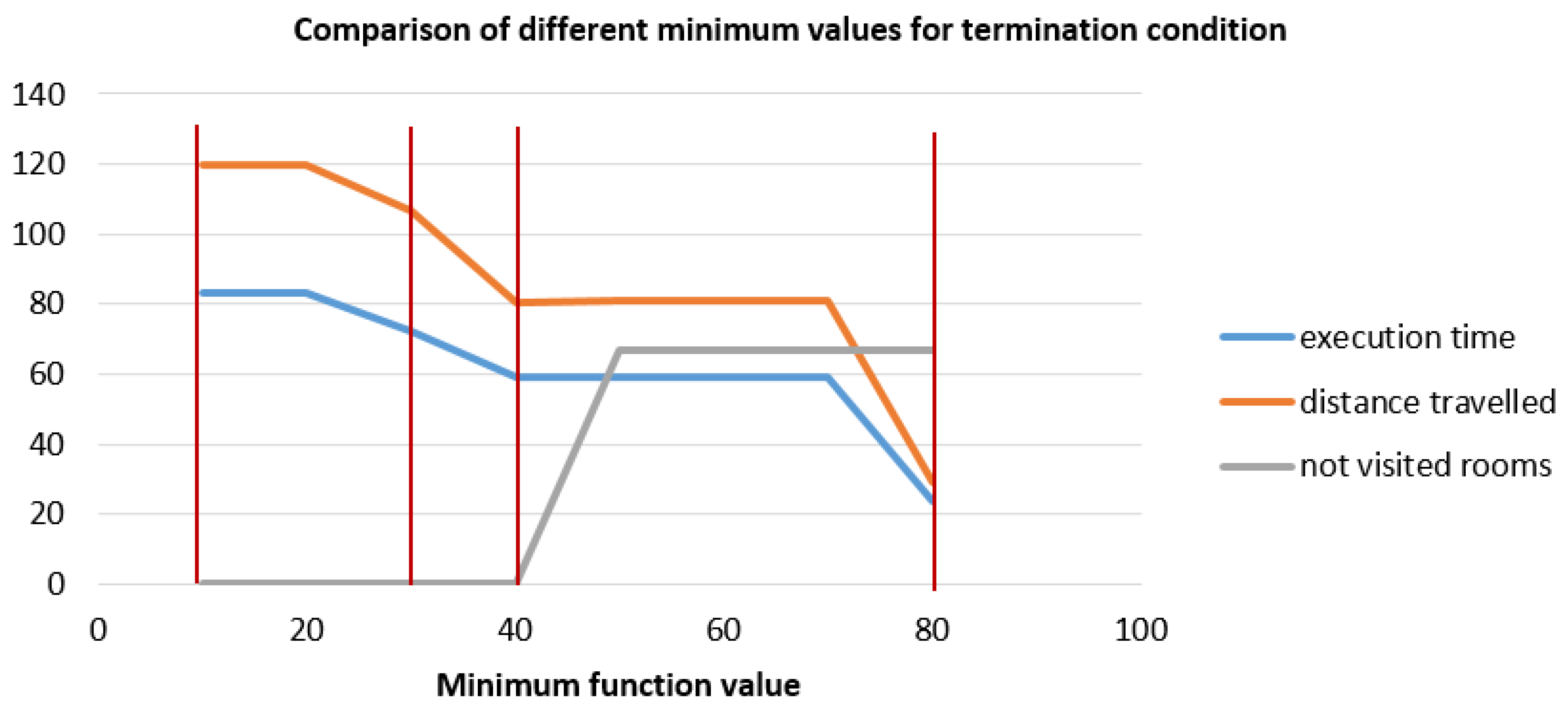
Figure 6a, minimum value 80, is not complete, but some other differences are not so obvious without some metrics. The metrics used for determining the minimum interesting function value are the execution time, the distance travelled and the percentage of non-visited rooms. As seen in
Figure 3, this environment consists of nine rooms and it is essential that the exploration algorithm explores each of the nine rooms. In
Figure 7, the execution time (min) is shown in blue, the distance travelled (m) is shown in orange and the percentage of non-visited rooms is shown in grey. The minimum value must guarantee that all the rooms of the environment are visited, whihc corresponds to a minimum value equal or inferior to 40. Analyzing the execution time and the distance travelled, both are minimized in 40 (within the valid values according to the number of visited rooms), thus 40 will be the optimal value. However, we decided to set the value to 30 penalizing the distance travelled but setting a tolerance for other situations. From now on, all experiments took place with a minimum interesting function value for termination of the exploration of 30.
3.6. Topological Map Building
Through this exploration algorithm, a topological graph of the free space is built. Each visited frontier corresponds to a topological node and the behaviors for travelling between frontiers correspond to the topological edges. The semantic information for classifying the frontiers is stored in the node along with its geometric information and topological information (connectivity between nodes). Previous works have presented different topologies and node/edge association to different elements in the environment according to the task. The proposed method has the advantage of representing the traversability of the environment, unlike the work of Fermin-Leon et al. [
19], where just a higher-level graph representing the connection between rooms is considered. In our work, traversability is represented as straight path lines between nodes where the distance between the nodes is sensor related so, when path planning, the robot could know if the path to reach the next node is free or occupied. Other topological representations, such as Generalized Voronoi Diagrams (GVD) [
4], also refer to the traversability of the environment. However, these representations may include curved paths between adjacent nodes (more difficult trajectory following) and distances higher than the sensor range to reach the next node (the robot is more prone to take unsuccessful paths). In addition, topological maps based on objects or distinctive places (see, e.g., [
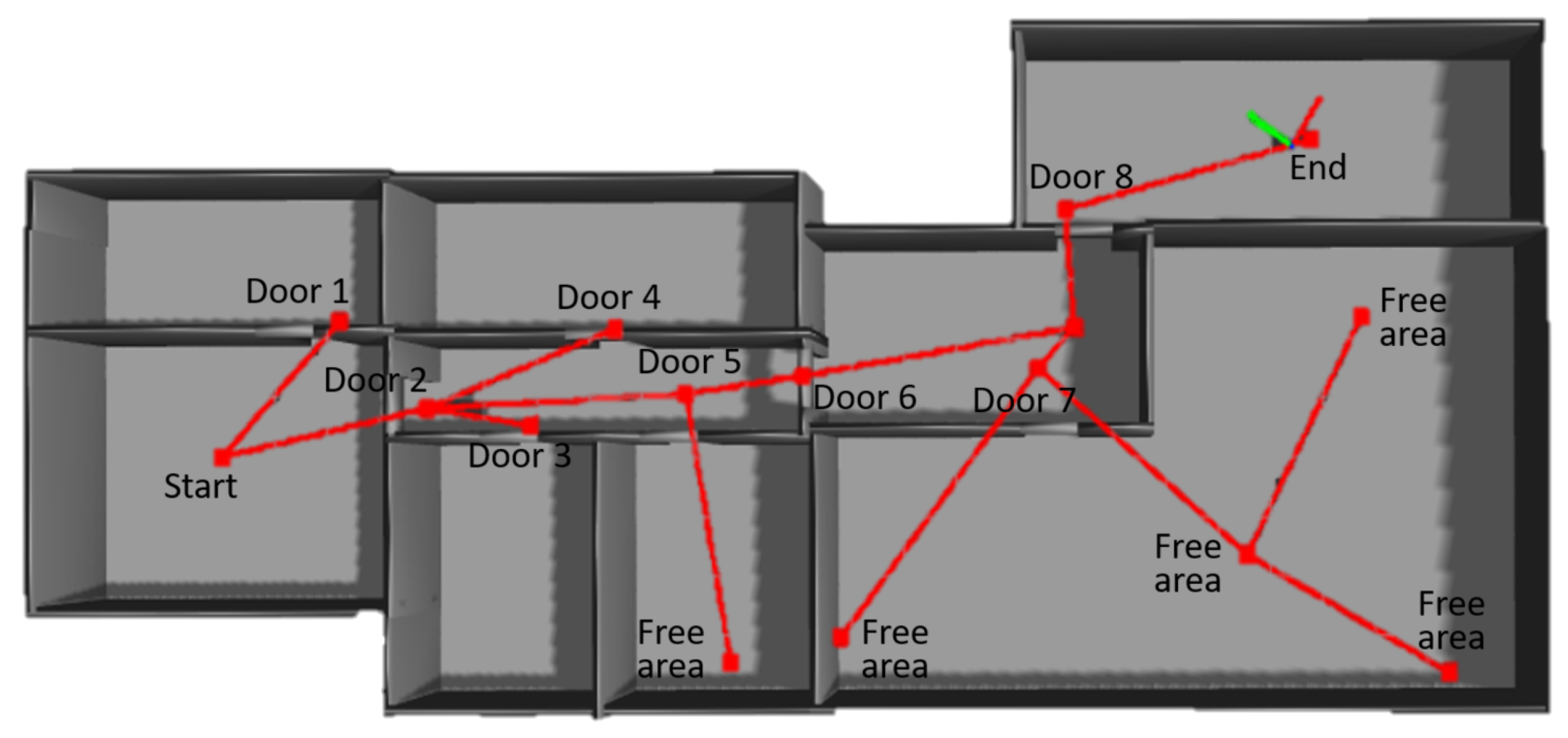
7]) represent the connectivity or travel path between the mapped objects or distinctive places. As for GVD, distances between distinctive places might be larger than the sensory horizon of the robot. To summarize, the main advantages for navigation of the proposed topological mapping method is that it represents the traversability of the environment thought straight lines with a sensor-related distance to improve node-reaching capability.
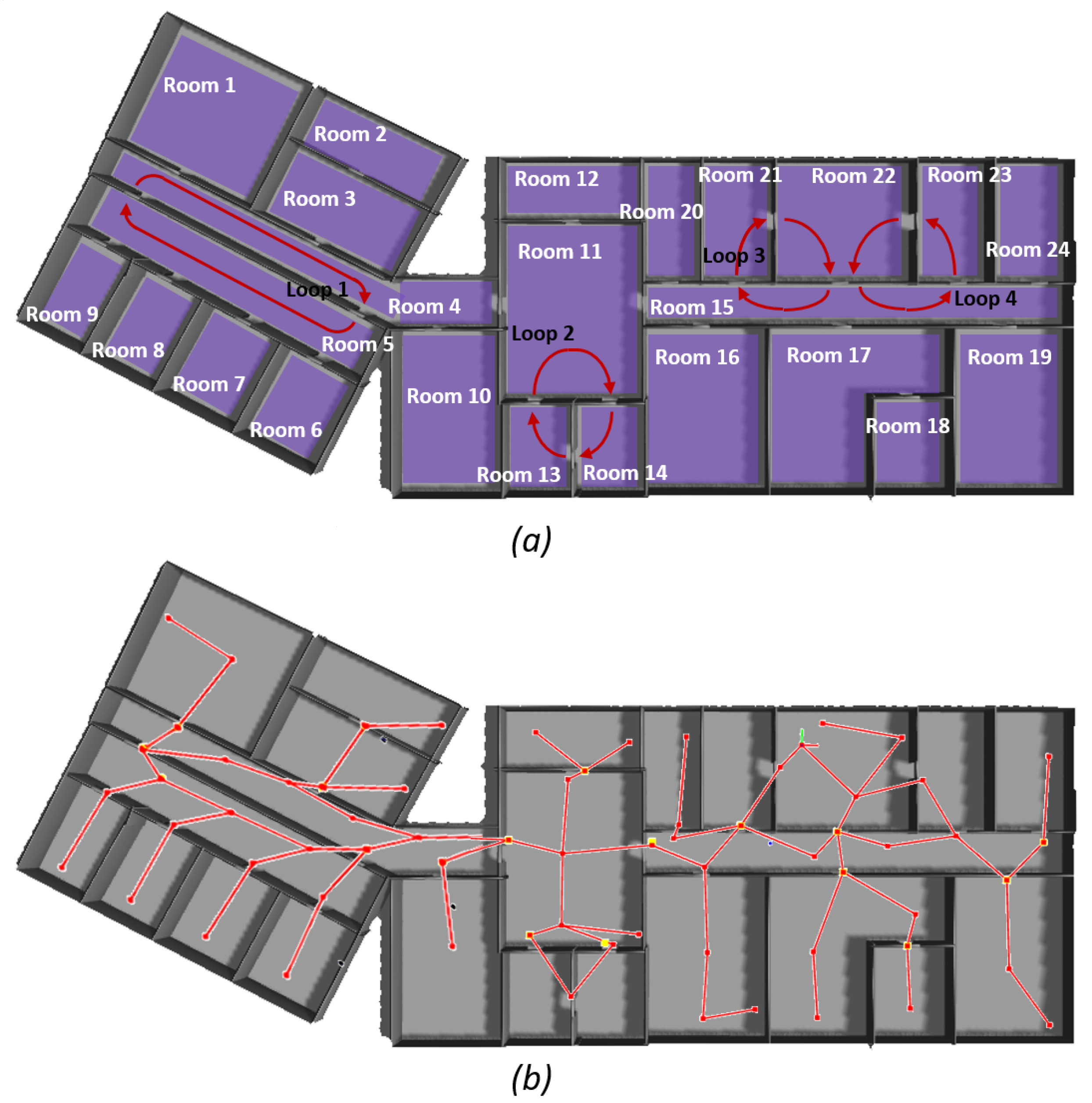
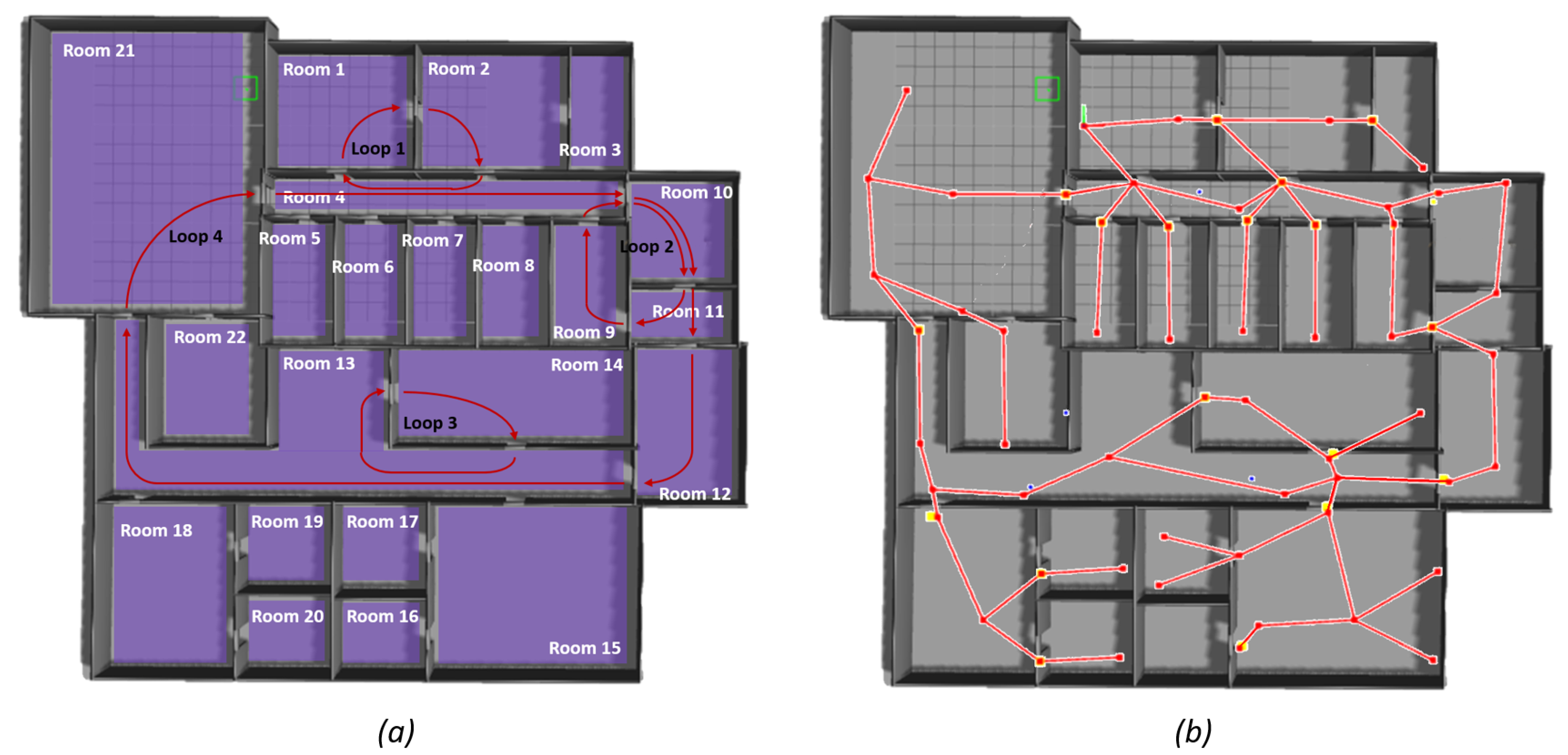
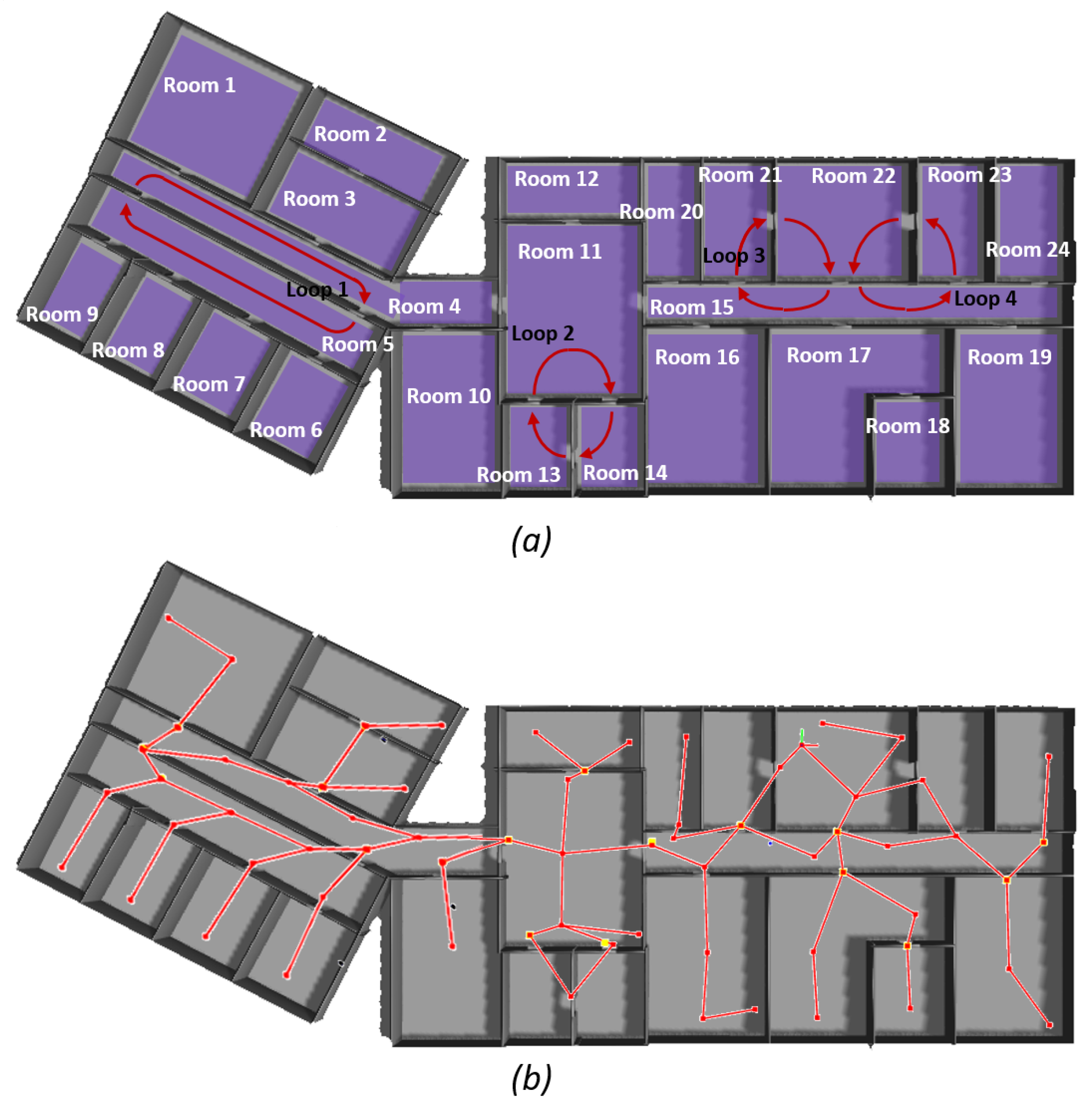
In
Figure 8, the topological map of a given environment built through the proposed method is shown. As described above, the map represents the traversability and allows the robot to travel through all the environment. In further stages this representation will be used to plan trajectories and move autonomously according to the extracted information.
The exploration algorithm proposed up to now explores and builds a topological representation of indoor non-cyclic environments identifying the free areas and the transit areas. In the next section the loop closing strategy to successfully explore and build cyclic maps is explained.
4. Loop Closing Strategy
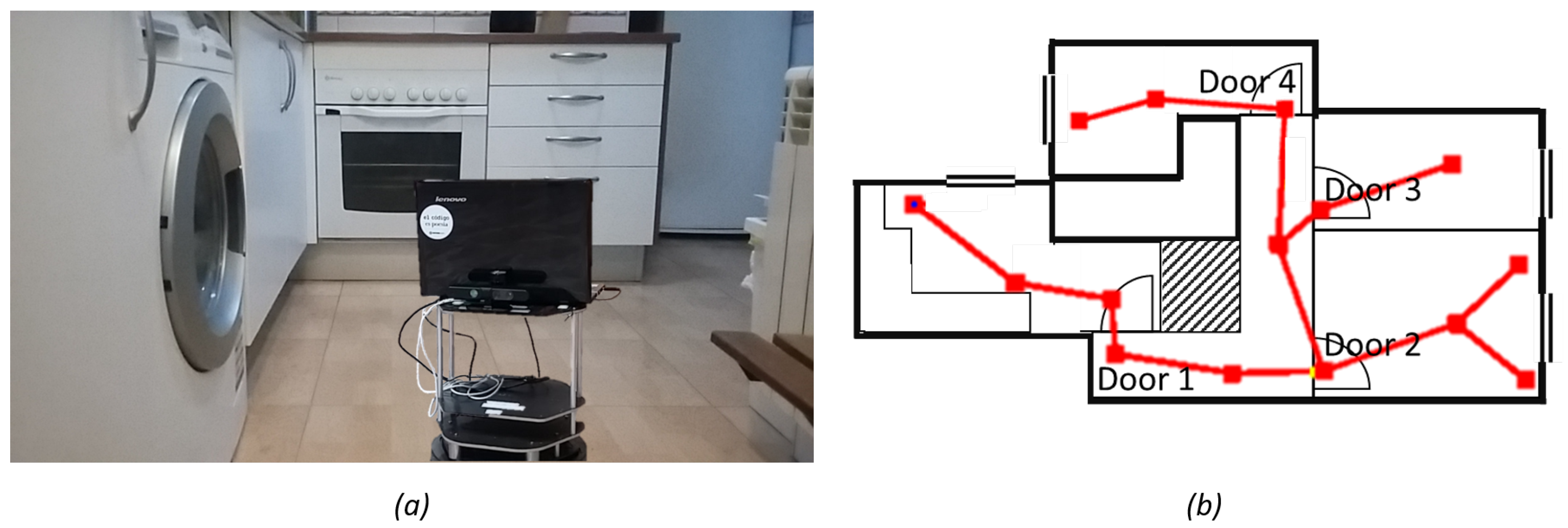
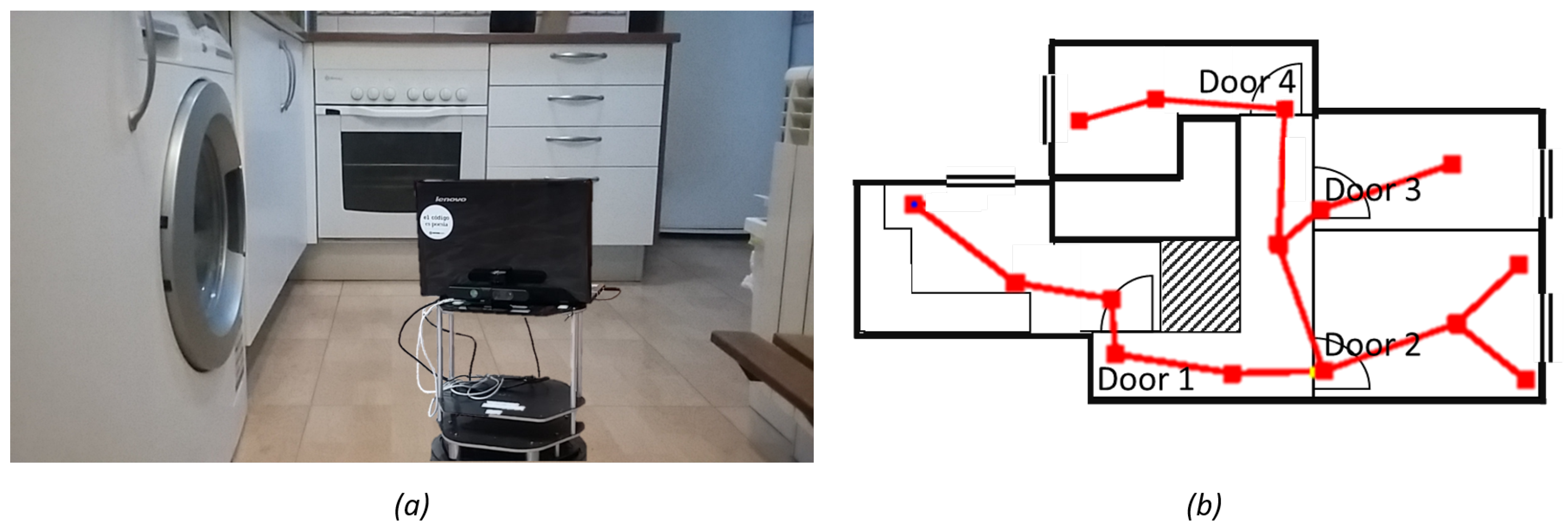
Robots will have to face any loop or cyclic situation (kitchens with two entrances or other office environments) at some point, as in the situation shown in
Figure 9. This exploration algorithm is complemented with a Loop closure strategy to successfully build the maps and explore the environment even when cyclic situations appear. Loop closure has been widely addressed by researchers. Most of SLAM approaches only considered geometric conditions to perform loop closure [
20] although some authors added visual features to the geometric information in order to have more robust results [
33,
34]. Other authors have tackled loop closure through localization. In [
35], a probability distribution is maintained during the exploration and whenever there are two peaks in the distribution (two nodes with high probabilities) the algorithm tracks those nodes to look for a convergence, loop, or divergence, different locations. Another approach [
36] is maintaining a tree with every possible hypothesis. Each hypothesis is associated with its probability and the tree is pruned until a decision is taken.
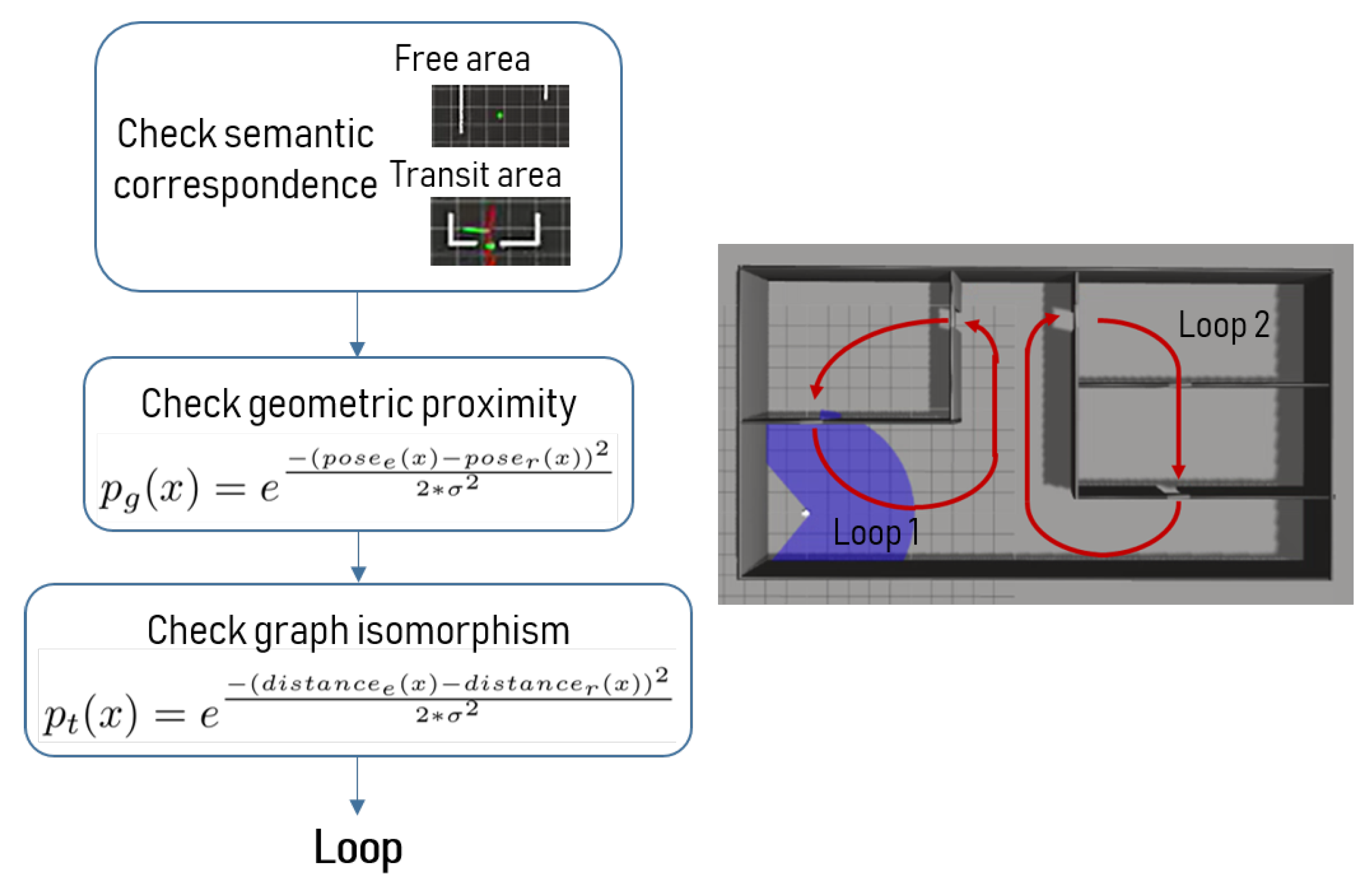
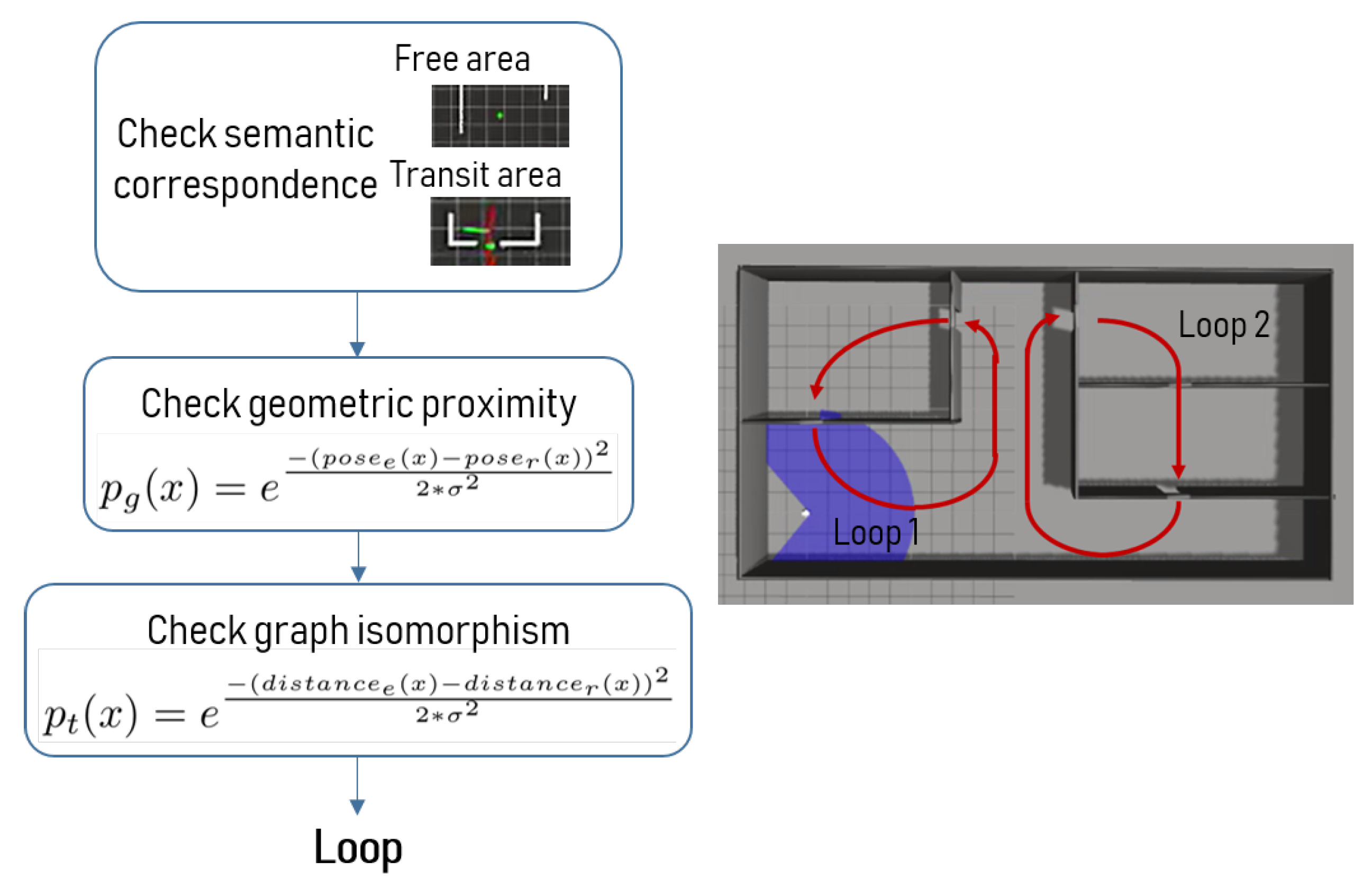
In this paper, we propose to use the geometric, topological and semantic information available for the nodes to estimate the uncertainty of being in a loop. We consider that the robot is in a loop when it is visiting (or closely visiting) a node that it has already mapped. According to the proposed algorithm this situation only happens when a node is reachable from two different paths from the same starting position. The process for identifying and accepting a loop is described in
Figure 9.
In this work, loop probability is built from geometric, semantic and topological information. Firstly, geometric uncertainty is considered as the difference between the estimated position of a node and the current position of the possible loop node. Semantic information is considered as the condition for the original node and the loop node of belonging to the same semantic type (free area or transit area). Geometric loop probability,
has been computed using a Gaussian distribution, according to Equation (
2). Terms
and
refer to the estimated and real positions, respectively, and
refers to a variance value that has been experimentally tuned.
In the case that two semantically identical positions obtain a geometric loop probability greater than a threshold (experimentally set to 0.3), a graph isomorphism process starts in order to obtain the topological uncertainty. The graph isomorphism used in this work consists in replicating the morphology of the graph associated to the original node starting from the possible loop node. In this process, the first step is to verify that the prior of the original node is reachable from the loop node. A prior is considered reachable when there is no obstacle between the current position and the prior position. If it is reachable, the robot moves until it reaches the prior node. The estimated distance and the real travelled distance are compared to determine the topological loop probability
(Equation (
3)). Terms
and
refer to the estimated and real distances to the prior node, respectively, and
refers to a variance value that has been experimentally tuned.
Graph isomorphism process iterates and compares the graphs until a positive or negative decision is reached according to the global loop probability,
. Normalized global loop probability, Equation (
4), relates geometric and topological uncertainties.
A positive decision implies the acceptance of the loop and the update of the topological map to this new situation. A positive decision is reached when the global probability surpasses a threshold value (set to 0.9) within five iterations of graph comparison. A negative decision implies that the loop is rejected and the topological map is not modified. A negative decision is reached when the global probability does not surpass the threshold value within five iterations, or when any of the priors is not reachable from the looping or isomorphic nodes.
In the following section, simulation and real-world experiments for non-cyclic and cyclic environments are included to uphold the improvement due to the proposed method.
6. Conclusions and Future Works
In this work, we have developed an exploration algorithm based on frontier-based exploration and behavior-based strategies that builds a topological map of the environment. We proposed using semantic, geometric and topological information of the environment to determine the next best position to visit in indoor environments through a cost–utility function. We also proposed a probabilistic loop closure method that uses those sources of information to validate the loops and solve the correspondences in the map. The novelty of the proposed exploration method is the semantic frontier classification and the cost–utility function for frontier selection. This semantic frontier classification is not an accessory process as it takes part in all the steps to successfully perform the exploration (frontier selection, behavior selection and loop closure). Semantic frontier classification divides the environment into transit areas and free areas. In this work, doors were used as transit areas but other approaches could be considered. For example, in outdoor road environments, transit areas can be road intersections. In this way, if the robot (or autonomous car) is moving on a road, it will map all the nodes along the road path as free area until an intersection is reached where a transit area will be defined. This will isolate the road segments as different connected places. The proposed exploration algorithm could be adapted to other scenarios just including the corresponding transit area detector and some specific constrains (as exploring within the road track limits).
We propose a topological mapping of the environment due to its robustness and efficiency when dealing with large environments. We have extended the topological map with the geometric and semantic information that is relevant for the well-performance of the navigation.
Finally, we validated our complete system in simulated and real indoor environments. We showed that the proposed method performs better than other state-of-the-art methods in terms of execution time and traveled distance. We also presented different maps generated for different environments and their correspondence and fitness to them.
Future works include path-planning and navigation using the autonomously built map, allowing re-mapping for long-lasting consistency of the map and calculating automatically the thresholds and values for the exploration and loop closure processes. In addition, a study of the drift will be performed for exploration of large environments.
In conclusion, we demonstrated that including semantic, geometric and topological information in the exploration process and topologically mapping the environment improves autonomous exploration performance with regards to execution time, distance travelled and robustness for large environments and more efficient results are obtained in real time.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}