Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS)

 , , , , ,
, , , , ,  , , ,
, , ,  , ,
, ,
Abstract
1. Introduction
2. Application Fields of DESIS
2.1. Coastal and Inland Waters
2.2. Cryosphere
2.3. Vegetation
2.4. Soil Sciences
2.5. Synergies
3. DESIS Products
3.1. Top-of-Atmosphere Radiance Product (L1B)
- Abnormal pixels. For the detection of the abnormal pixels, along with the dead pixel map table, a scene-wise quality analysis is performed right after the radiometric conversion. The analysis results are part of the final TOA radiance product in the form of a quality quicklook, which describes the status of each pixel. Table 2 provides a list of the abnormal pixel types. Once the abnormal pixels are flagged, a hybrid interpolation method is used to minimize their impact in the final processing steps of the L1B processor. This hybrid interpolation selects the optimum value between spectral and spatial cubic spline interpolation. The selection criterion is based on the spectral gradient difference between the interpolated pixels and spatial neighbors.
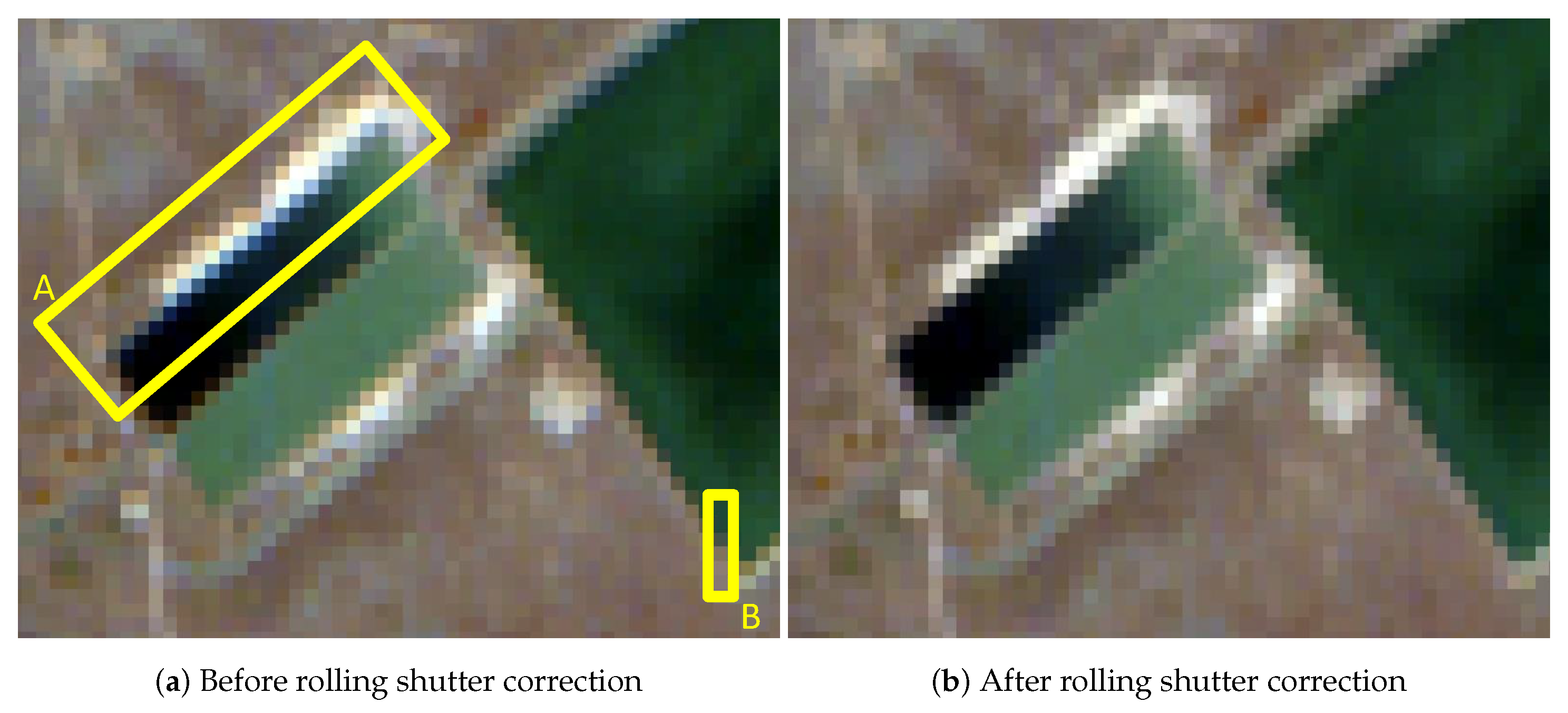
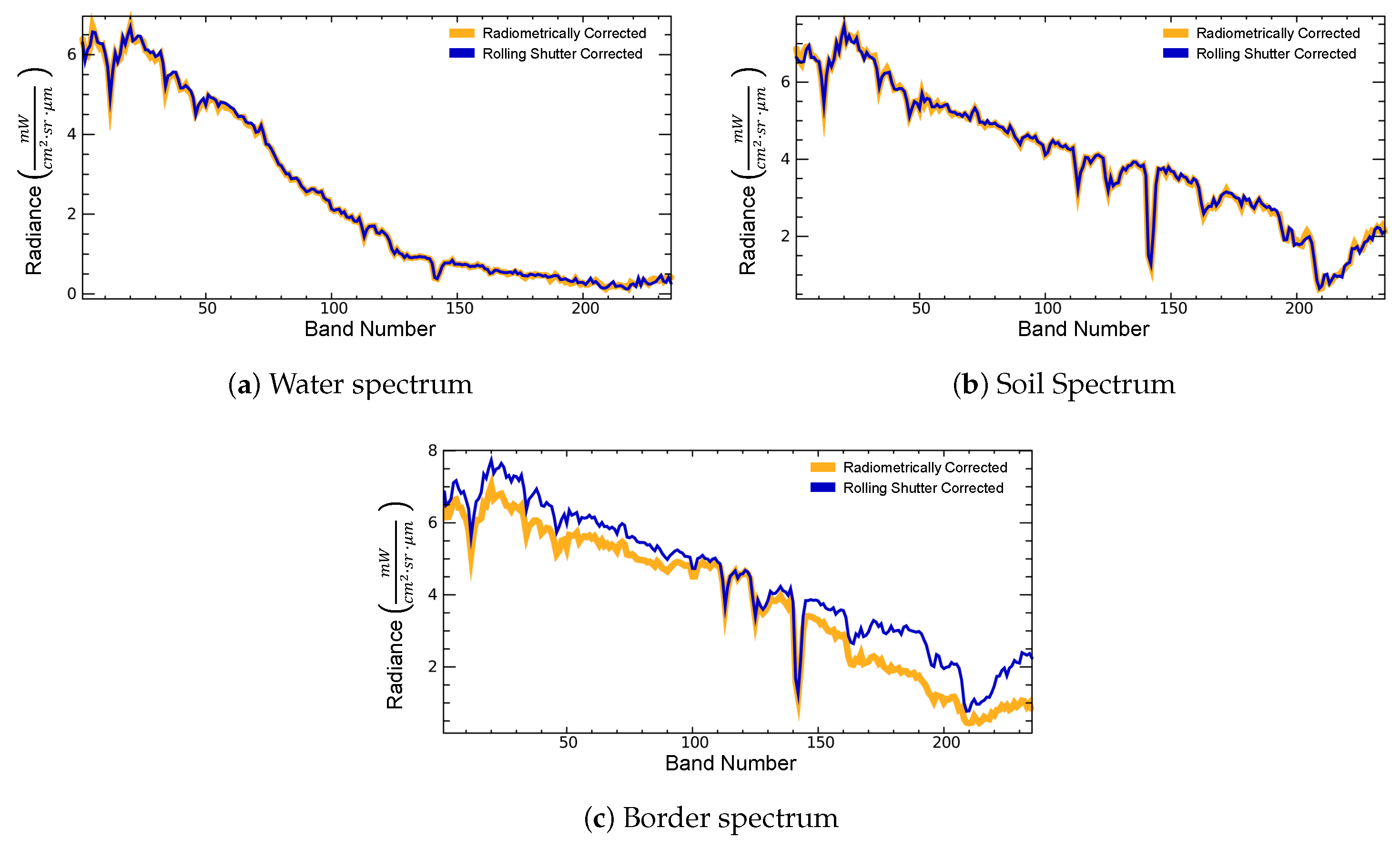
- Rolling Shutter. The DESIS sensor has a CMOS detector that uses a rolling shutter mode, which enables a higher frame rate and better SNR than a global shutter. The drawback of the rolling shutter is that each scan line (i.e., spectral channel) is collected at a slightly different time. Thus, each channel in a frame measures reflections from a different area on the ground due to the time delay between the beginnings of exposure for each of the spectral channels. The L1B processor accounts for the shift between the spectral channels within a frame and corrects it using bi-cubic spline interpolation on the along-track direction.
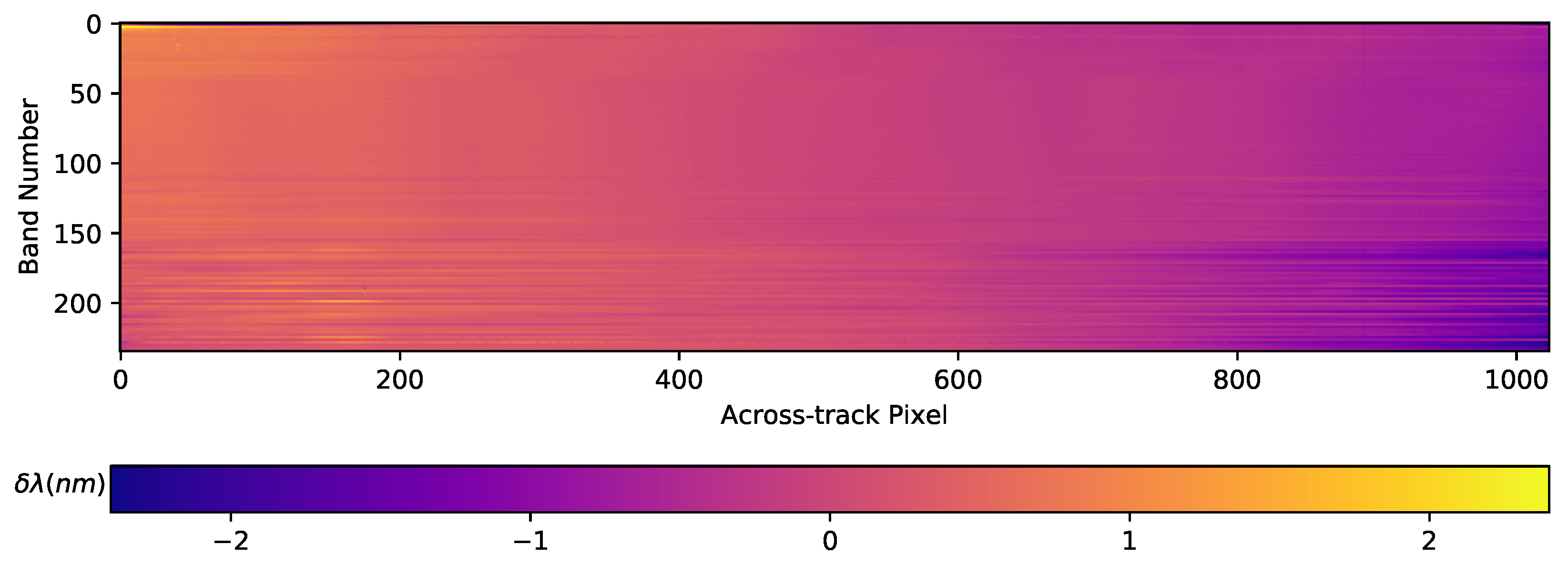
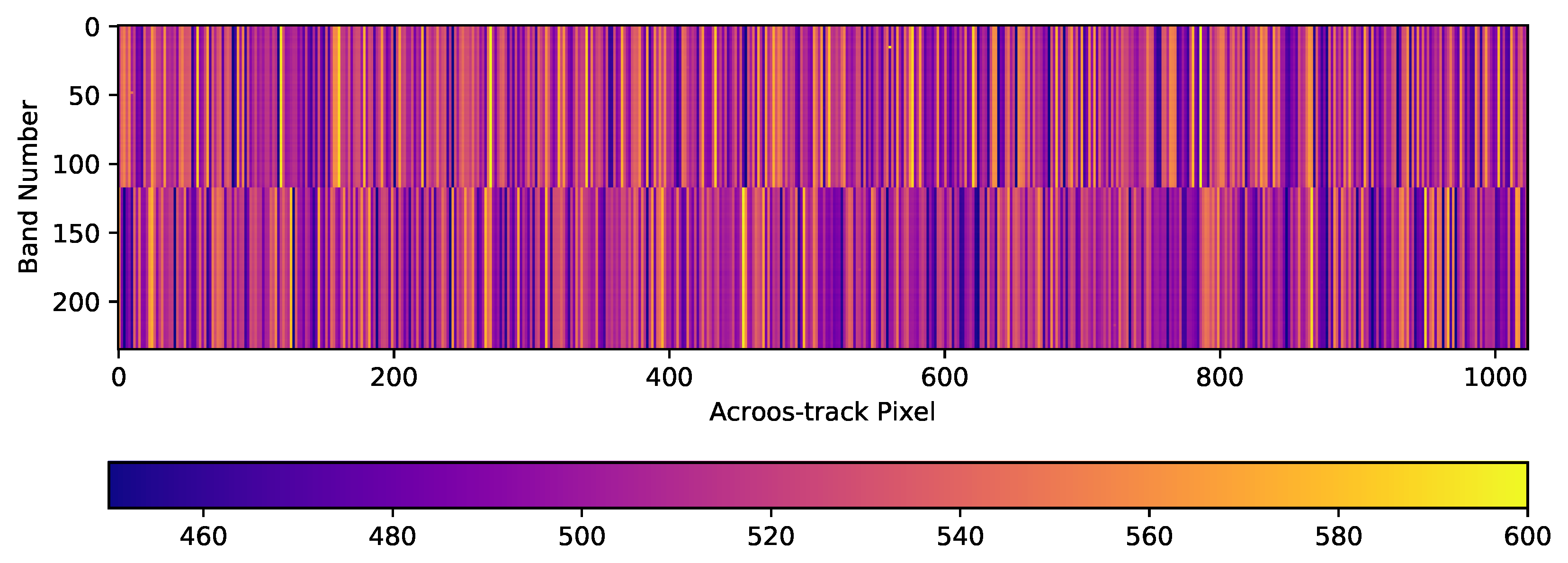
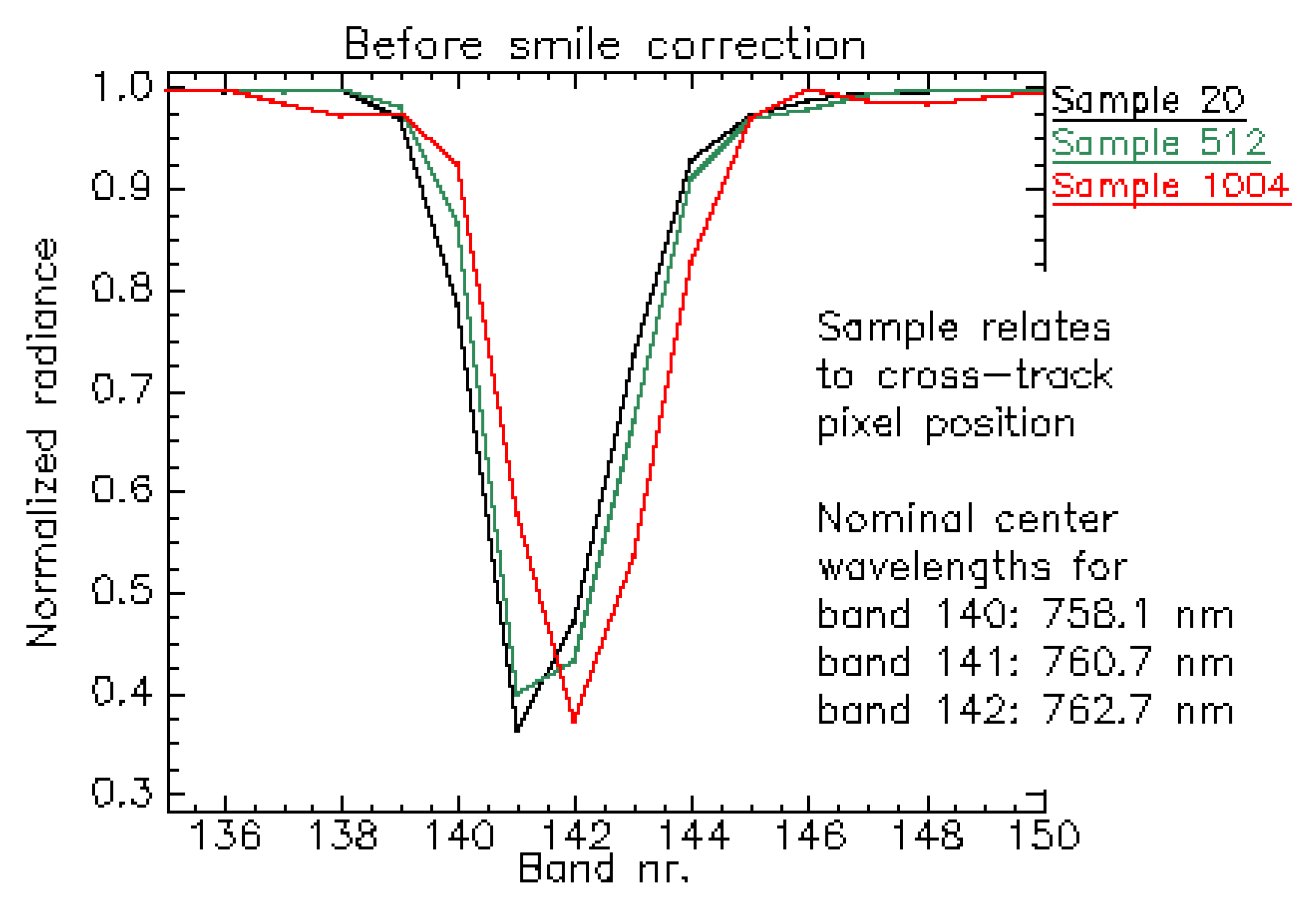
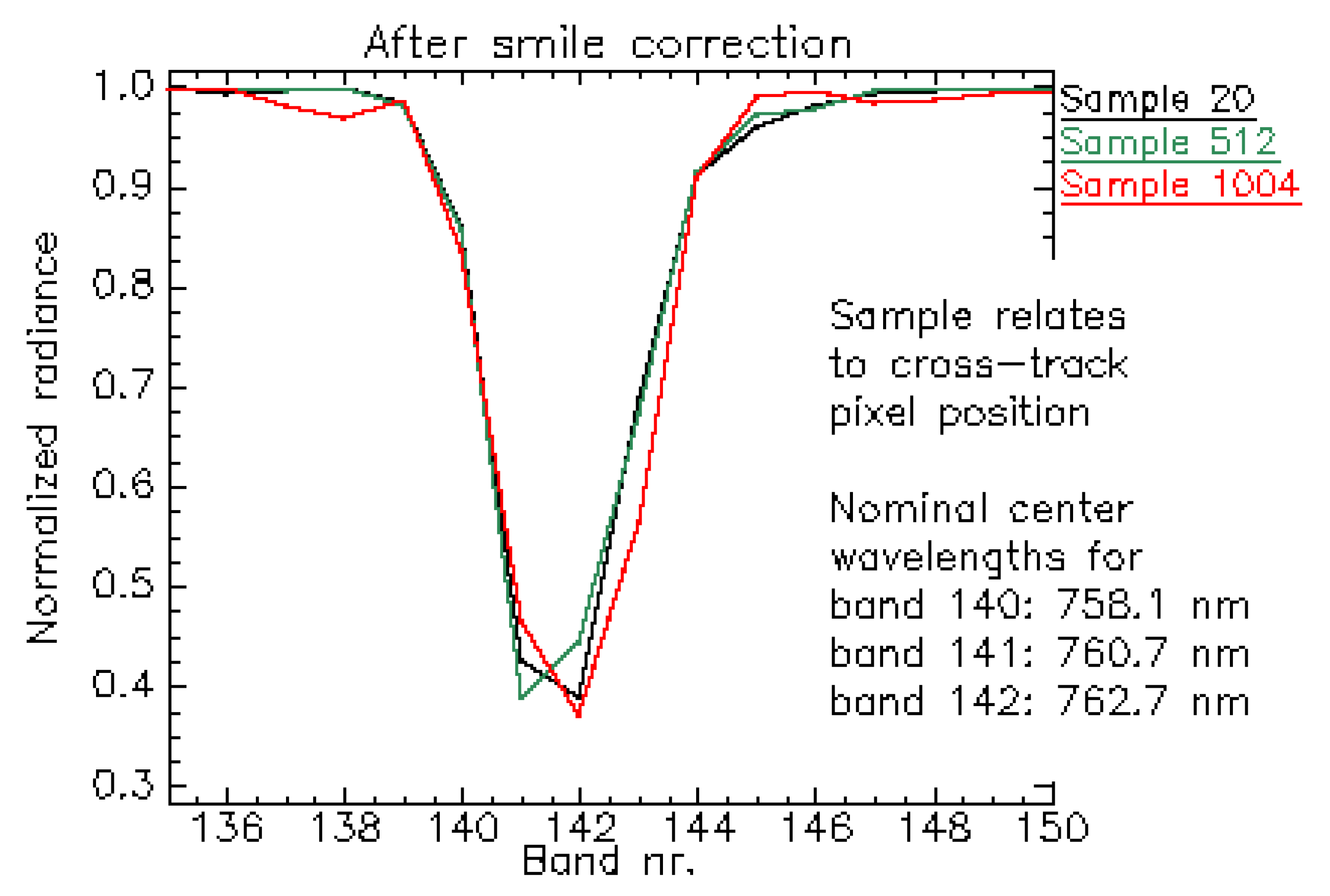
- Smile and Clocking. The spectral smile effect results in a variation of the channel central wavelength in the across-track direction. Taking the measured central wavelength on the sensor’s center as the nominal central wavelength, the spectral smile produces a shift of the measured central wavelength with maximum values at the sensor edges. The TOA radiance product provides a smile corrected image by performing a bi-cubic interpolation over the spectral dimension on every pixel across-track. The difference between the nominal central wavelengths and the characterized wavelengths is shown on Figure 1. One of the main contributors to the mismatch is the clocking effect produced by a small misalignment between the grating plate and the focal plane. On the lower-half bands, this effect is contained within a 1 nm difference, excluding the values in the manufacturing defect region. For the upper-half bands, apart from the clocking, the optical etaloning effect increases the central wavelength mismatch. The etaloning effect appears on back-illuminated CCD sensor due to the transparency of silicon at NIR wavelengths. This property allows coherent light to reflect between the front and back surfaces producing interference patterns which disturb the measurements [92,93]. The influence of the etaloning is most noticeable on the highest bands and pixel values across-track.
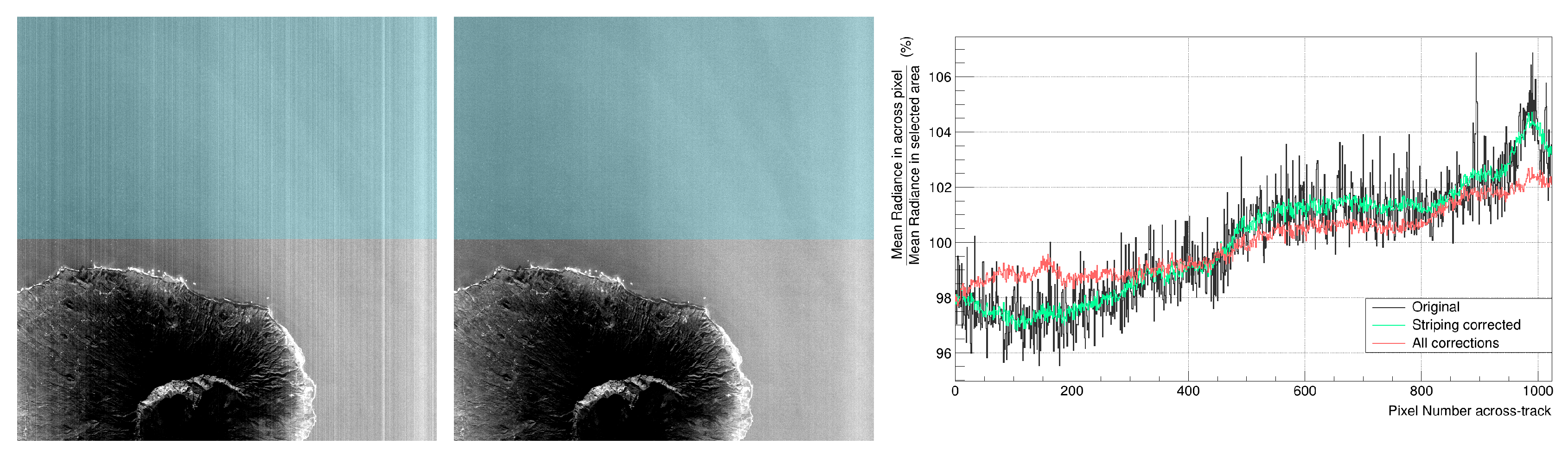
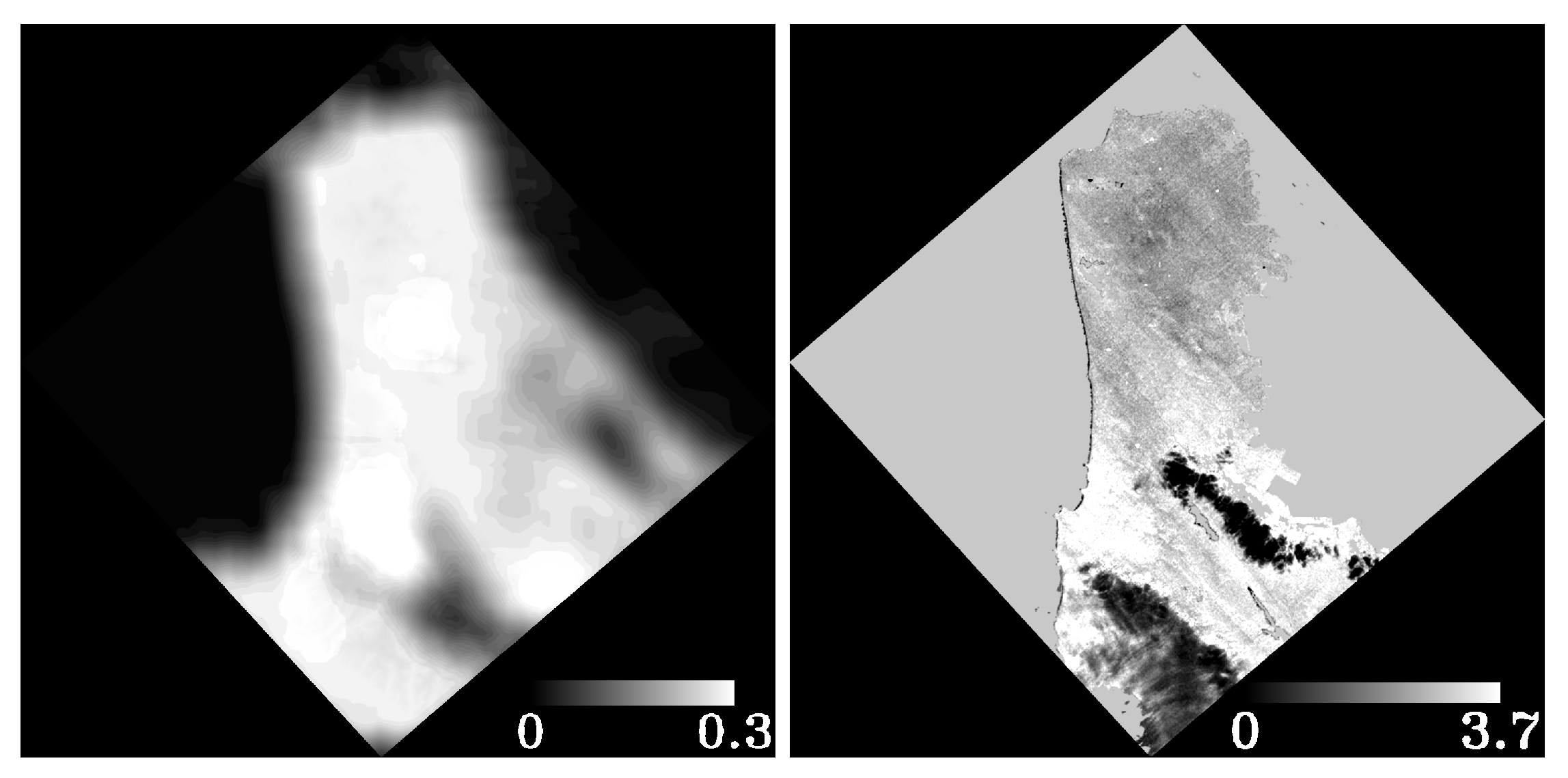
- Striping. Small pixel-to-pixel variations in the radiometric calibration factors of a push-broom sensor result in visible along-track stripes in the acquired images. These variations can be due to after-launch effects or sensor changes over time. A striping correction is introduced in the DESIS processing chain as a multiplicative correction on the smile-corrected radiometric values. Typically, the striping correction values observed in DESIS are below 1%, making it difficult to obtain the values from a simple update of the radiometric calibration tables. To address this effect, an iterative method, employing cubic splines to fit the across-track data using dozens of spatially homogeneous scenes and to find the parameters that minimize the stripes, has been implemented. An example of the striping effect on an image and its correction is shown in Figure 2.
- 5.
- Spectral Binning. DESIS processing chain supports four different spectral binning configurations. Binning , or no-binning, is the nominal instrument data acquisition mode, offering 235 bands with a nominal spectral sampling of 2.55 nm and Full Width Half Maximum (FWHM) of 3.5 nm. Binning modes , , and provide spectral resolutions of 5.1 nm, 7.65 nm, and 10.2 nm, respectively. The strategy for the spectral binning follows the hardware read-out sequence. Thus, during processing, the bands are binned starting from the center of the focal plane towards the the edges.
3.2. Georeferenced and Resampled Product (L1C)
- Generate a panchromatic image (DESIS-PAN) using DESIS VNIR bands closest to the wavelengths of the reference image (RI), employing the global Landsat 7 ETM+ reference database.
- Coarsely register the panchromatic DESIS-PAN by affine transformation based on current knowledge of the geometric mapping function.
- Apply a Wallis filter to the DESIS-PAN and the RI to locally enhance the image contrast for a better image matching.
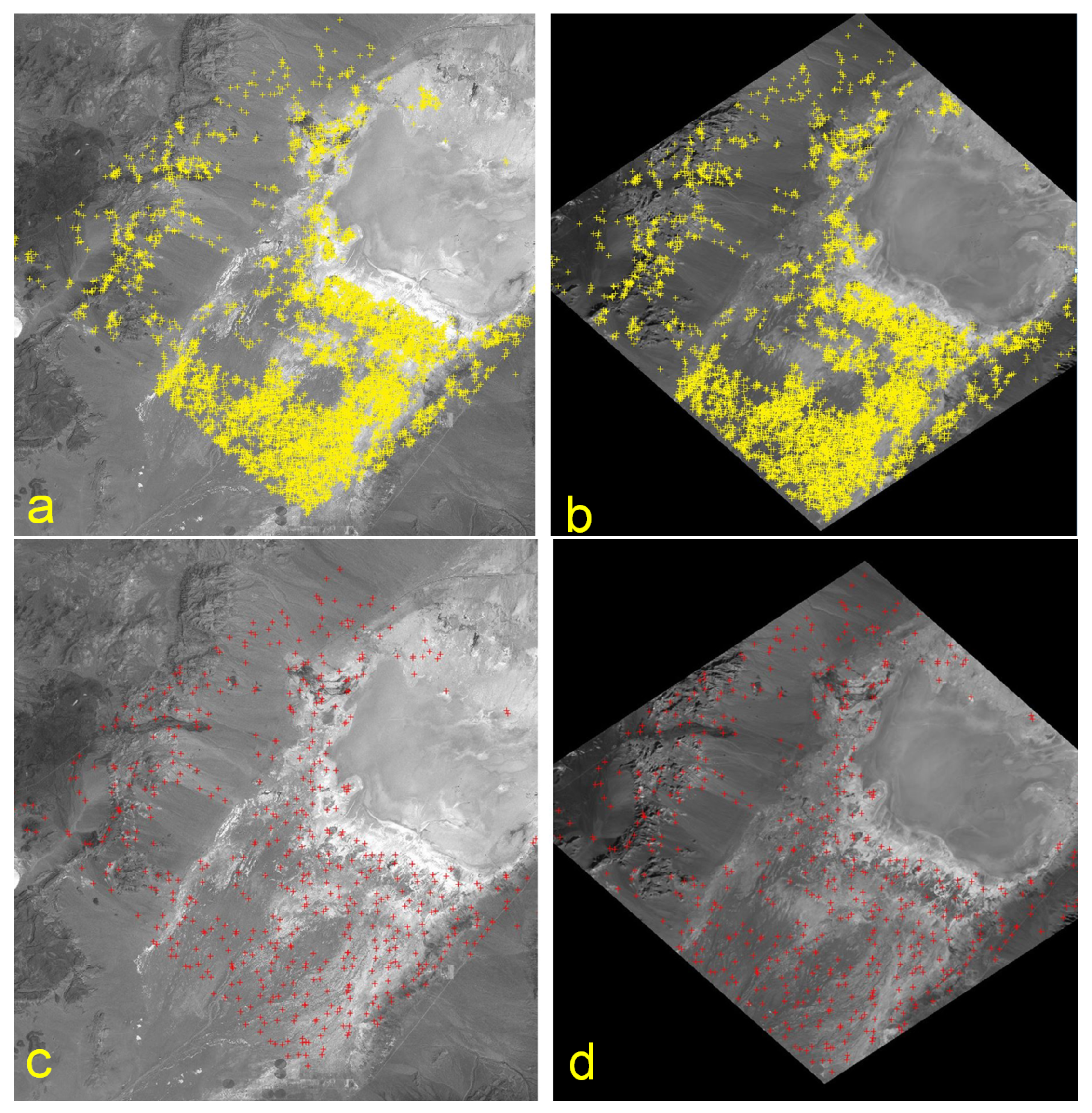
- Perform a cascade of image matching methods to extract homologous points (see Figure 3).
- After a highly selective outlier detection and removal, three-dimensional points are generated using the global SRTM 1 arcsec Digital Elevation Model (DEM) and split into Ground Control Points (GCP) for sensor model refinement and Control Points (CP) for geometric accuracy assessment (see [94]).
- Within an iterative least squares estimation, the DESIS mounting angles are refined and applied for direct georeferencing. The least squares estimation includes a final outlier removal, where GCPs with the highest residual and greater than a threshold (here 2 pixels) are successively removed from the GCP set.
3.3. Atmospheric Compensated Product (L2A)
- Bottom-of-atmosphere (BOA) surface reflectance in units ranging from 0 to 1.
- Quality masks containing classification, aerosol optical thickness (AOT) and water vapor (WV). The 10 layers (see Table 3) are ordered as follows, with the first eight indicating which pixels are classified according to the different criteria:
- High spectral resolution (0.4 μm) radiative transfer (RT) functions LUTs are simulated using MODTRAN (version 5.4.0) [103] for both mid-latitude summer and winter seasons.
- The simulated radiative transfer functions are transformed to sensor specific radiative transfer LUTs by convolving them with the sensor response function per band. The same response functions are used to calculate the solar irradiance for DESIS sensors using the Fontenla [104] solar model. The sensor response functions, RT LUTs and solar irradiance values are different for the different binning modes (Section 4.3.2).
- The scene’s corresponding season is automatically determined from the land surface temperature (LST) corresponding to the scene, with a season temperature threshold of 8 C (below which winter is assumed). The LST is retrieved from MODIS (Moderate Resolution Imaging Spectroradiometer) products, by querying the MODIS database MOD11C3 (version 6) [105], which contains the worldwide monthly averaged LST in a 0.05 degree grid.
- Masking: According to a set of pre-established thresholds, the pixels are classified into clouds, shadows, dark-dense vegetation (DDV), water, haze, etc.
- Aerosol Optical Thickness over land is retrieved per pixel using red and NIR surface reflectance of dark dense vegetation pixels identified within the scene [106].
- A water vapor map is calculated for each pixel with the Atmospheric Pre-corrected Differential Absorption (APDA) algorithm [107] using the water absorption region around 820 nm, interpolating several bands.
- Rugged-terrain [101] or flat-terrain Bottom-Of-Atmosphere reflectance: If less than 1% of the scene contains pixels with slopes , the flat-terrain scenario is assumed to retrieve the surface reflectance in order to avoid potential DEM artifacts.
4. Product Quality and Validation
4.1. Temperature Monitoring and Dark Signal Stability
4.2. Radiometric Calibration and Properties
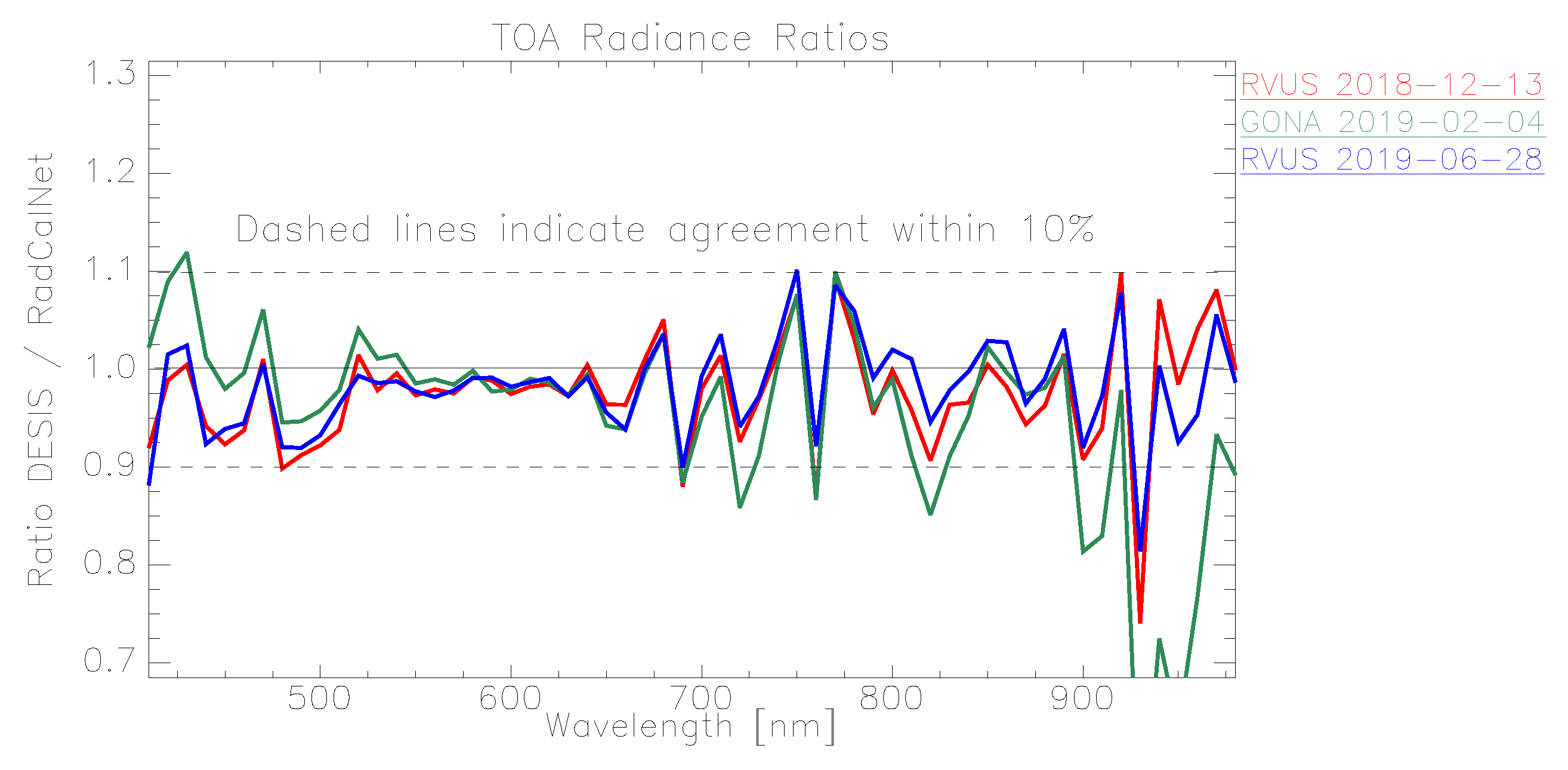
4.2.1. Top-of-Atmosphere Validation against RadCalNet
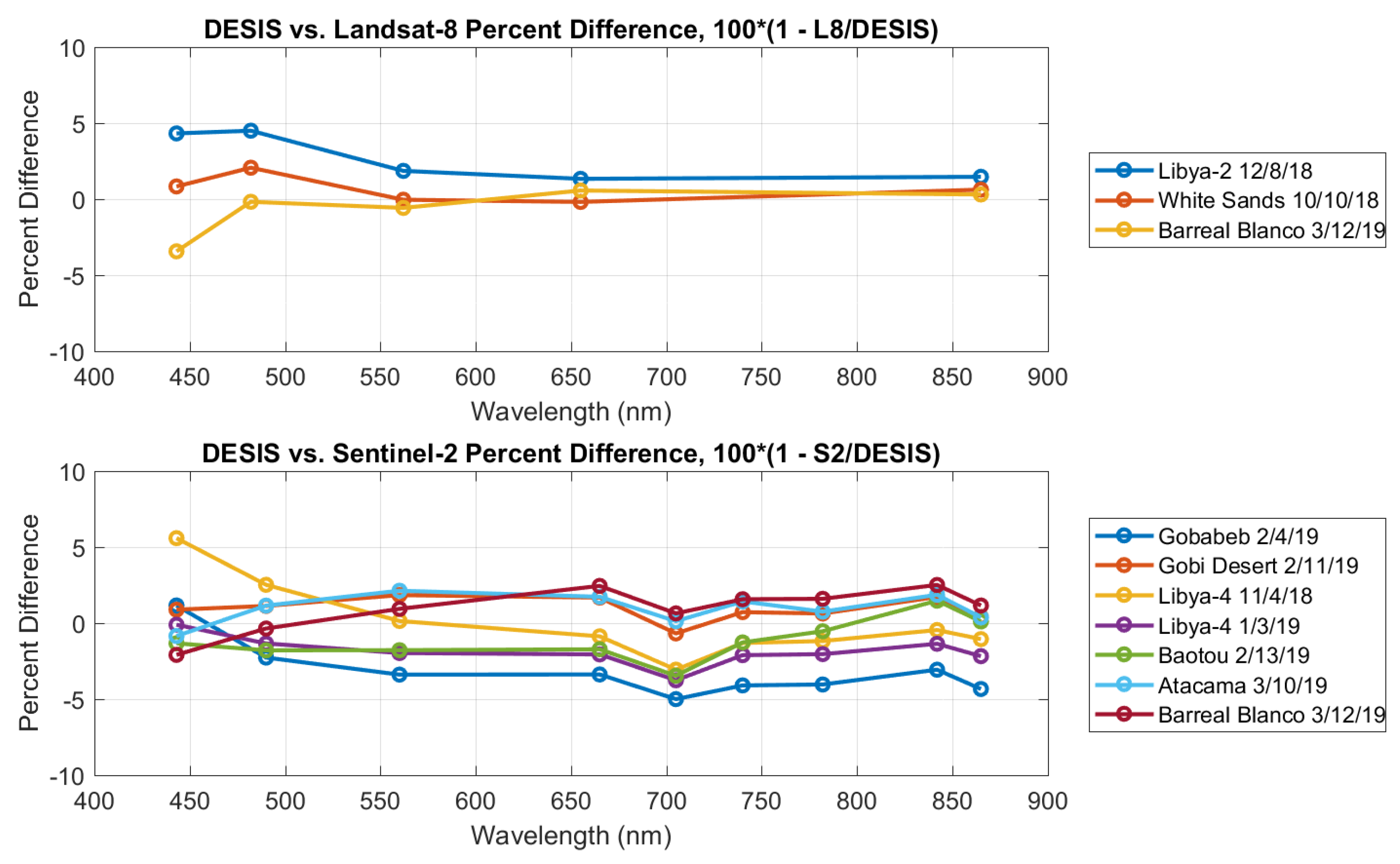
4.2.2. Top-of-Atmosphere Validation against other Missions
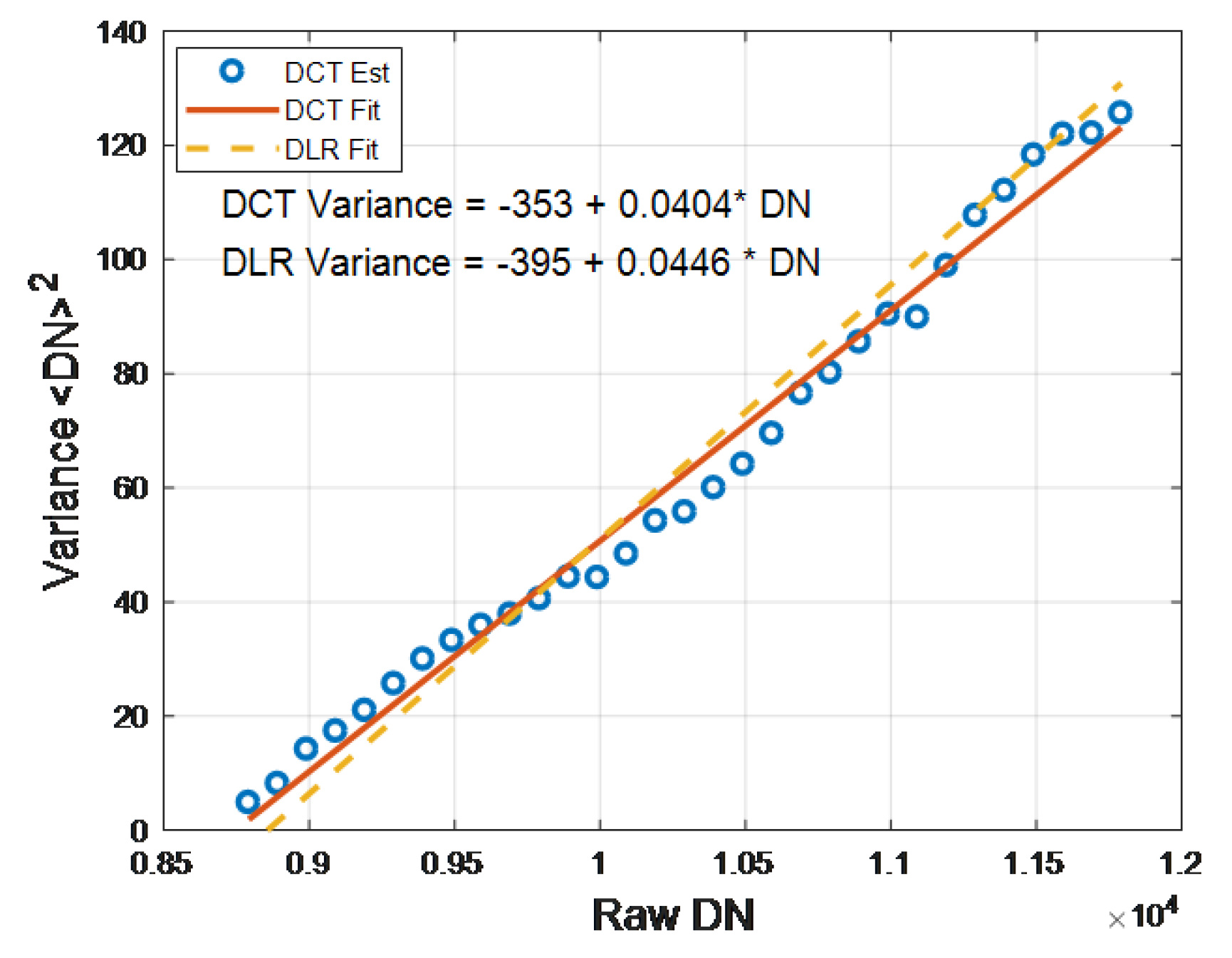
4.2.3. Signal-to-Noise Ratio
4.3. Spectral Calibration and Properties
4.3.1. Rolling Shutter Correction
4.3.2. Spectral Smile Correction and Validation
4.4. Geometric Properties
4.4.1. Modulation Transfer Function MTF
4.4.2. Geolocation Accuracy
4.5. Surface Reflectance and Atmospheric Properties
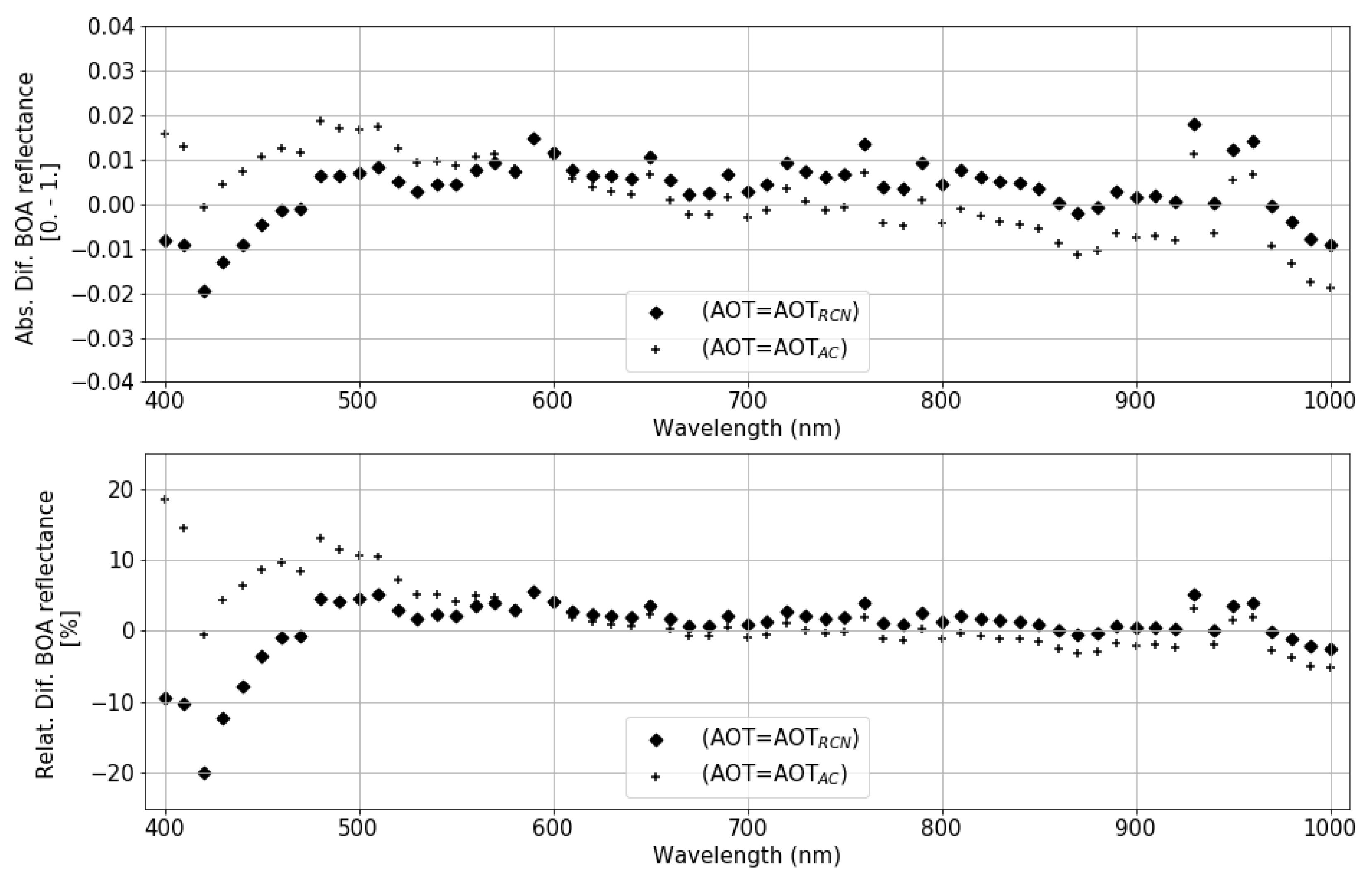
4.5.1. Aerosol Optical Thickness and Water Vapor
- Space: The DESIS measurement is extracted from a 9 km × 9 km region of interest (here after called ROI) around the AERONET coordinates.
- Time: The AERONET measurement is interpolated to the overpass time of DESIS through the AERONET station coordinates.
- Wavelength: The AERONET AOT data are interpolated to 550 nm wavelength.
- AOT is extracted from the DDV pixels detected in the scene.
- WV is extracted from clear land pixels.
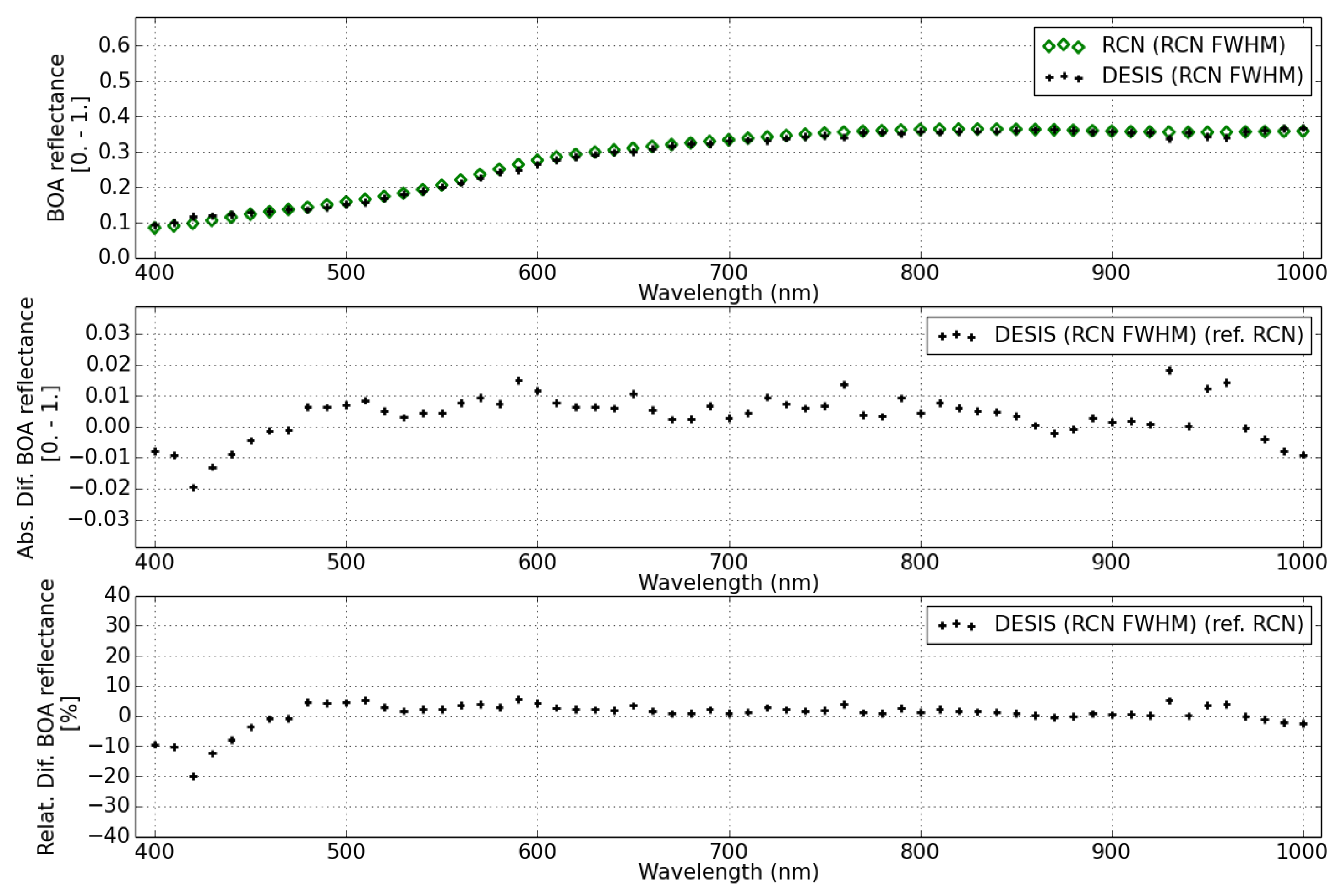
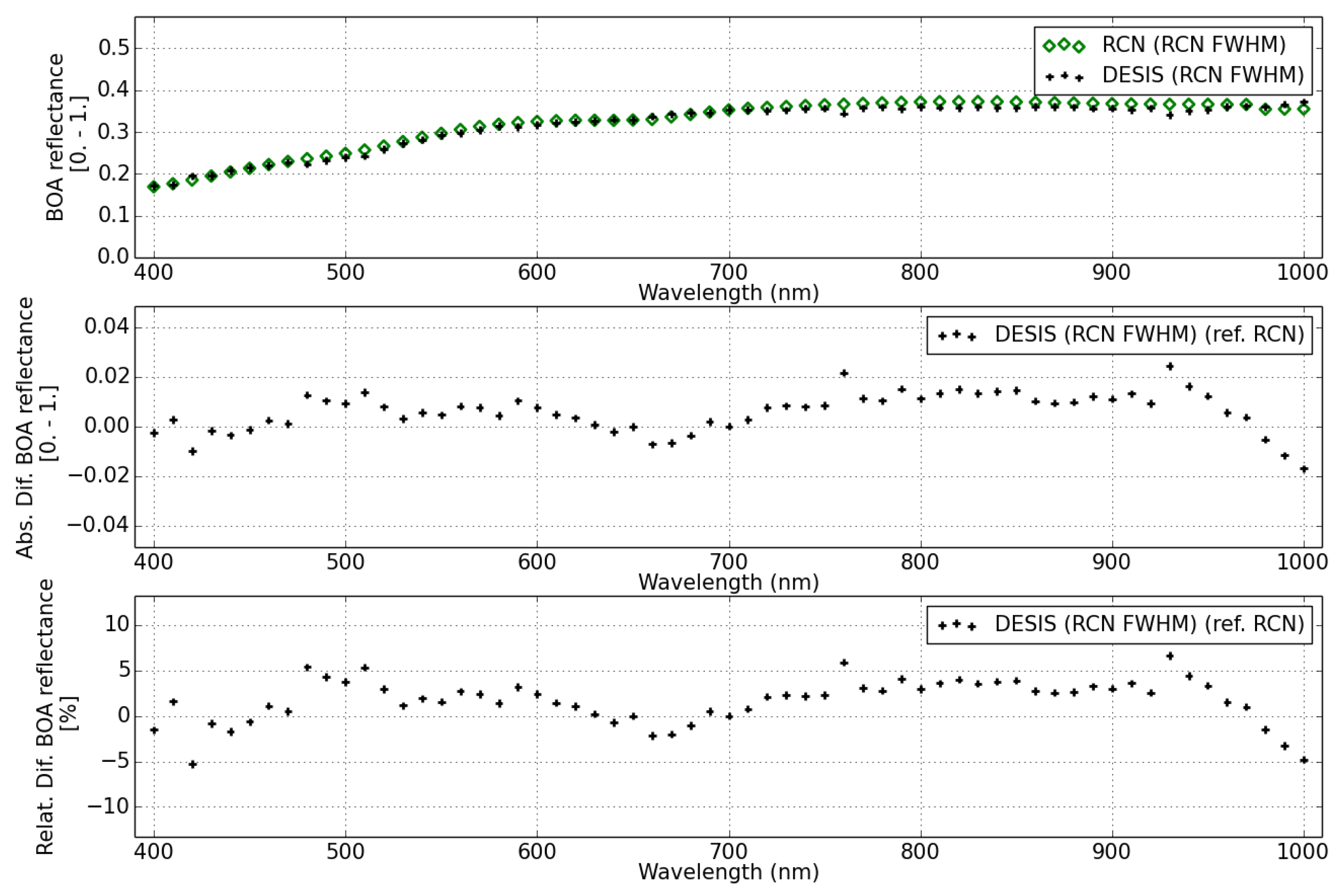
4.5.2. Bottom-of-Atmosphere Reflectance
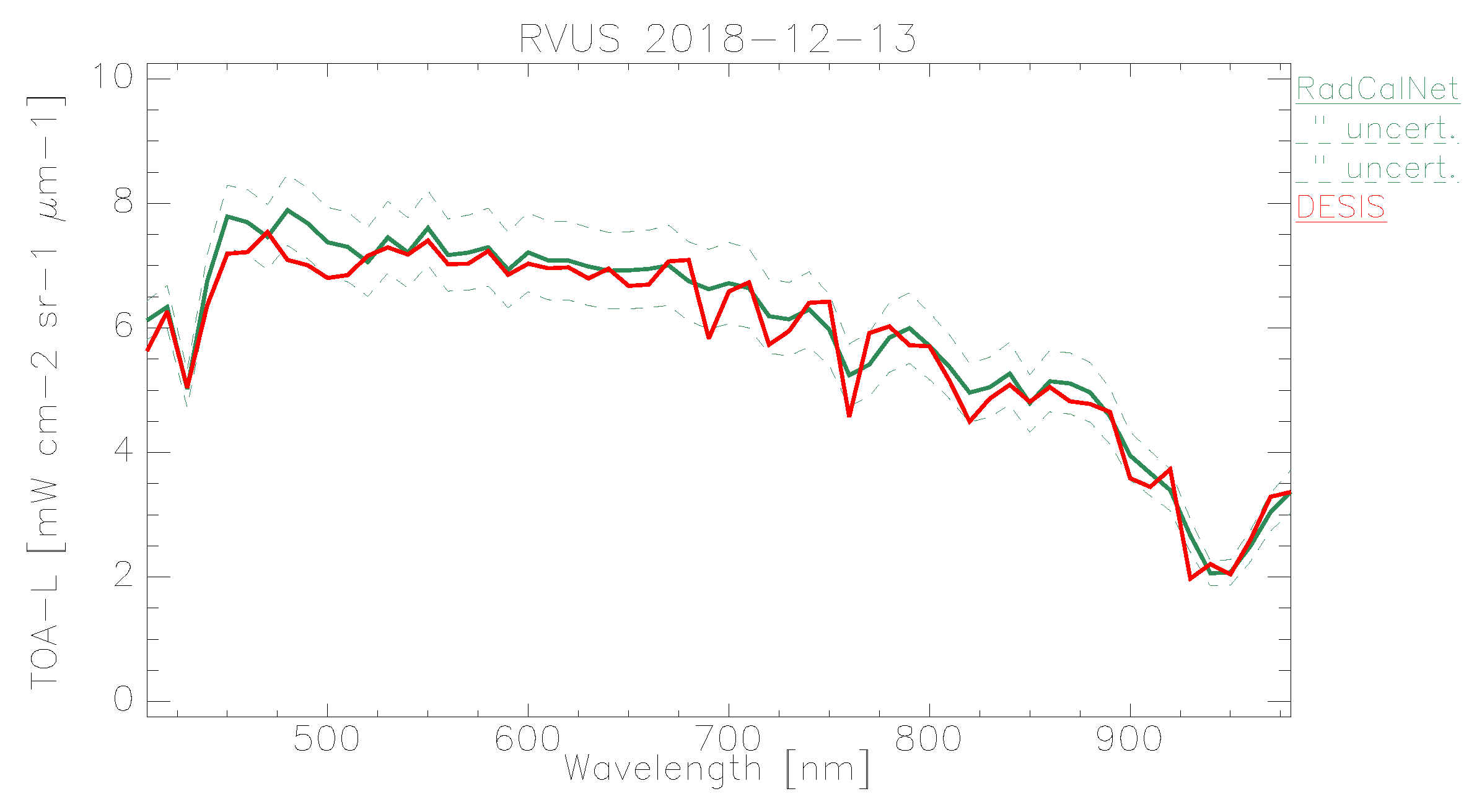
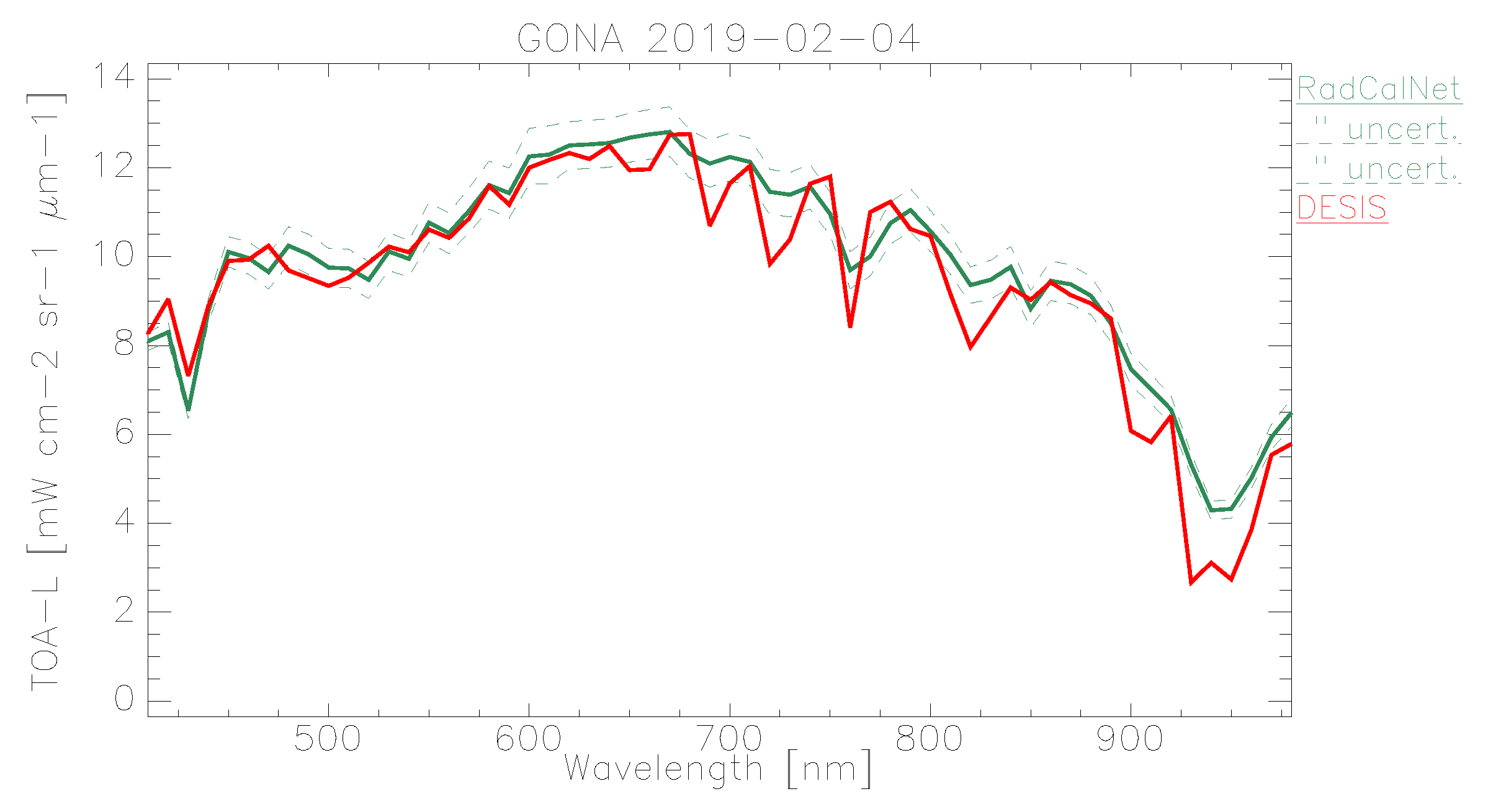
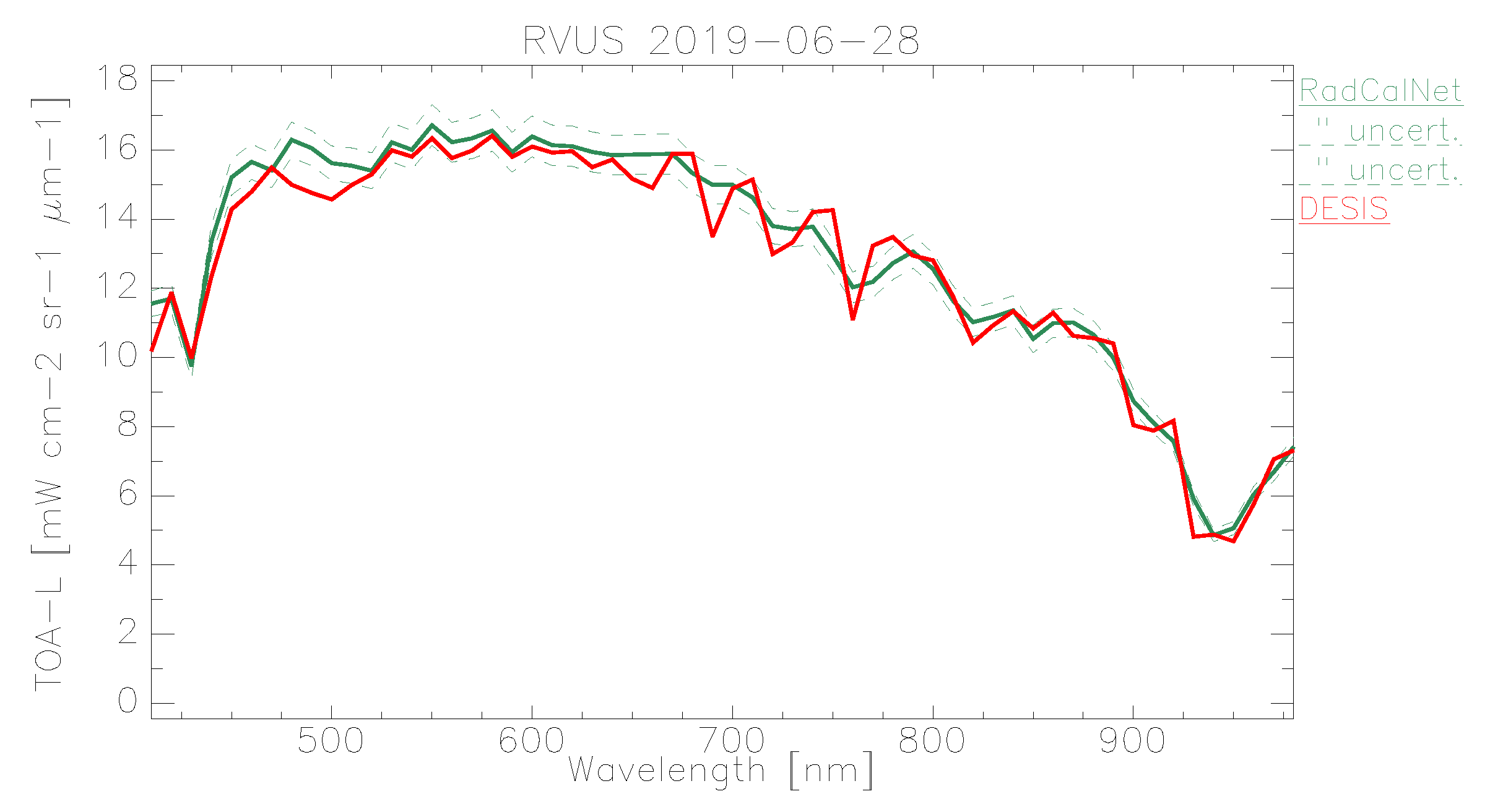
- Time: Spectra comparison is only performed between data takes acquired within the same day. For RadcalNet, the TOA spectra are the interpolation result between two measurements spaced <30 min.
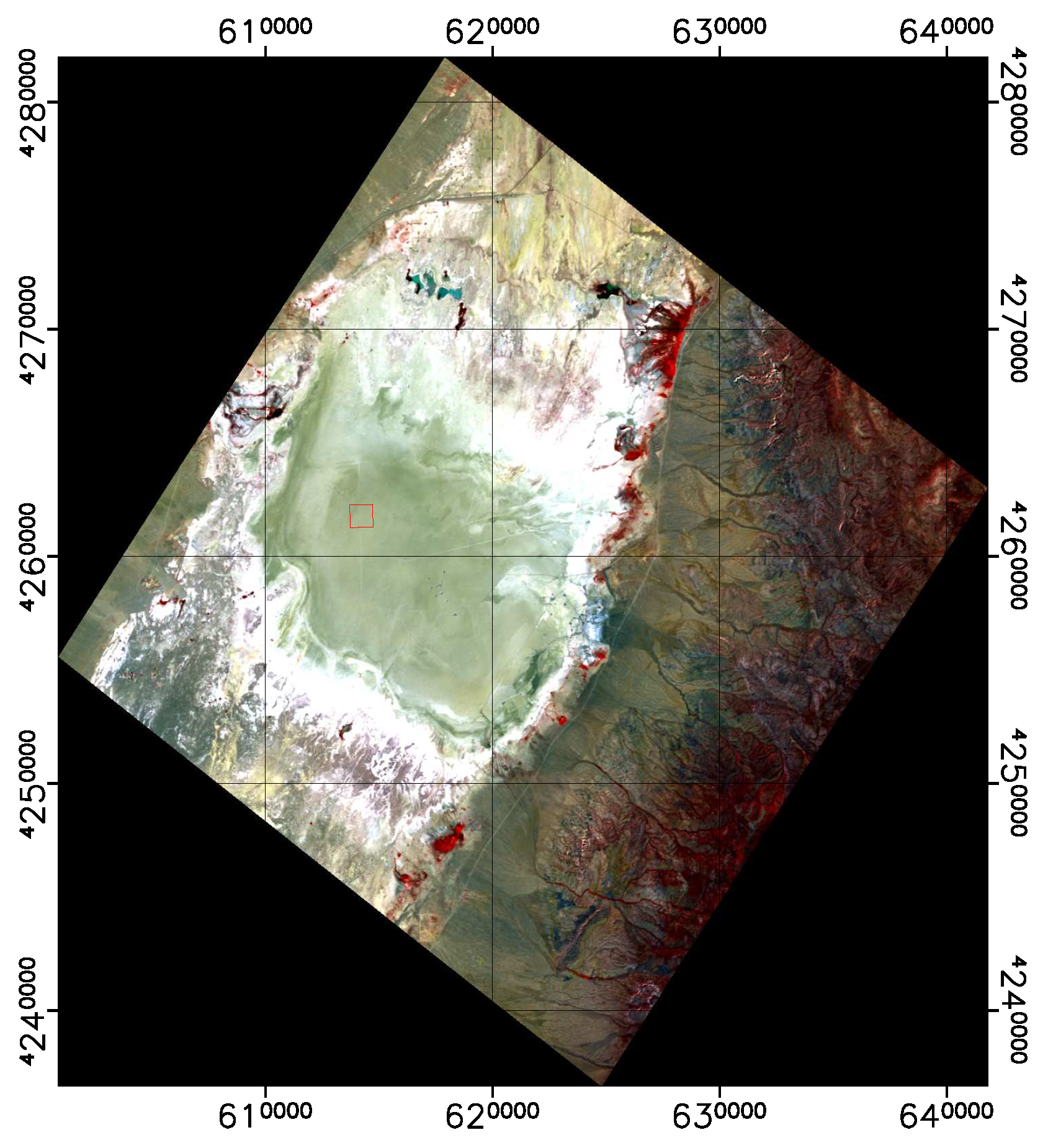
- Space: Different extensions around RadCalNet measurements points are considered depending on the site surface reflectance homogeneity specifications (see Table 10). The extension considered in this study is specified in a separate column in the table.
- Wavelength: The spectra of all the sensors are convolved to the SRF of the sensor per band with larger FWHM (in this case, RadcalNet) (see Equation (5)).
5. Product Limitations
5.1. Image Artifacts and Dead Pixels
5.2. Geolocation Accuracy
5.3. On-Board Radiometric Calibration
5.4. Spectral Properties
5.5. Radiometric Properties
5.6. Masks
- Snow and clouds: Mis-classifications may result in snow pixels classified as clouds, due to a rather similar spectra both classification types for the available wavelengths of the sensor.
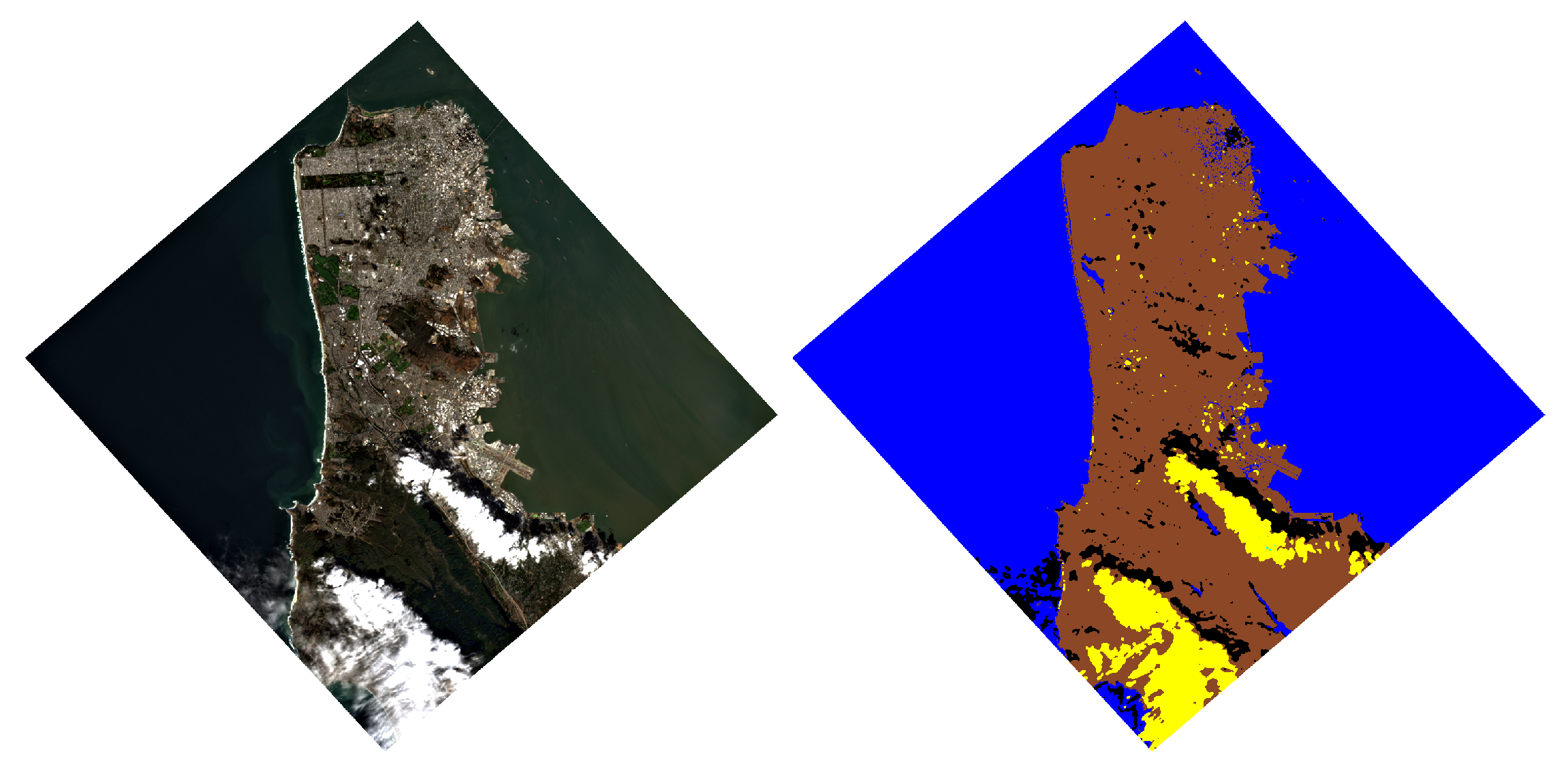
- The clear land mask will contain all pixels not identified by any of the different masks algorithms contained in the pre-classification routine. This is the case for DESIS concerning cirrus clouds. Some clear land pixels might contain thin and medium cirrus, as DESIS does not have any band at ∼1.38 μm. Only thick cirrus are likely to be included in the clouds mask (see lower left corner in Figure 4).
- The clouds over water mask will always be empty by default. Its values can only be filled when an external water mask is provided. Future software release could include such external water mask as input.
- Both haze masks might contain very bright water pixels.
5.7. Rugged Terrain Atmospheric Correction with Noisy DEM
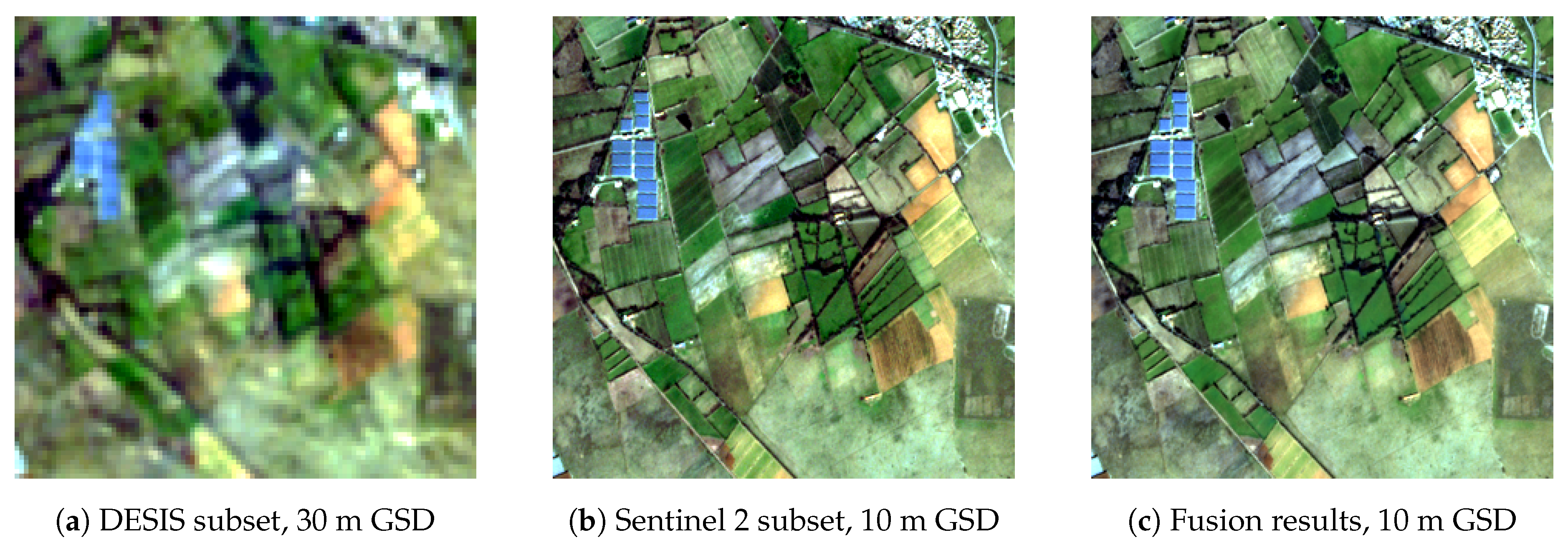
6. Data Fusion Experiment—An Outlook
Target Detection
7. Conclusions
- Absolute radiometric calibration is well within 10% at the TOA radiance and TOA reflectance level when validated against RadCalNet, Sentinel-2 and Landsat-8.
- Spectral calibration after smile correction is typically better than 0.5 nm, and always within of a spectral pixel.
- SNR is greater than 200 in the green spectral region for a 30% albedo, 45 degree solar elevation, MLS 23 km visibility, and rural aerosol TOA radiance.
- MTF@Nyquist (across track) is about 0.3–0.4.
- Geometric accuracy with respect to reference is 20 m (<1 pixel) linear RMSE in the case that GCPs can be derived from image-to-image matching; otherwise, RMSE is 300–500 m.
- BOA reflectance is within <10% based on RadCalNet, Pinnacles, and Sentinel-2 comparisons.
- The current limitations in the use of the various DESIS data products herein are described, as well as future work and improvements.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AOT | Aerosol Optical Thickness |
| BOA | Bottom-Of-Atmosphere |
| BRDF | Bi-directional Reflectance Distribution Function |
| CDOM | Colored Dissolved Organic Matter |
| CP | Control Points |
| CMOS | Complementary metal-oxide-semiconductor |
| DC | Dark Current |
| DCT | Discrete Cosine Transform |
| DM | Detector Map |
| DN | Digital Number |
| DDV | Dark Dense Vegetation |
| DESIS | DLR Earth Sensing Imaging Spectrometer |
| DLR | German Aerospace Center |
| DEM | Digital Elevation Model |
| DSM | Digital Surface Model |
| EnMAP | Environmental Mapping and Analysis Program |
| ES | Edge Slope |
| GCP | Ground Control Points |
| GSD | Ground Sampling Distance |
| ISS | International Space Station |
| MTF | Modular Transfer Function |
| MUSES | Multi-User-System for Earth Sensing |
| NIR | Near Infrared |
| PICS | CEOS Pseudo-Invariant Calibration Sites |
| RCN | RadCalNet |
| ROI | Region Of Interest |
| SA | Spectral Angle |
| SNR | Signal-to-Noise Ratio |
| SRF | Spectral Response Function |
| SRTM | Shuttle Radar Topography Mission |
| TBE | Teledyne Brown Engineering |
| TOA | Top-Of-Atmosphere |
| TSM | Total Suspended Matter |
| VNIR | Visible Near Infrared |
| WV | Water Vapor |
References
- Schaepman, M.E.; Ustin, S.L.; Plaza, A.J.; Painter, T.H.; Verrelst, J.; Liang, S. Earth system science related imaging spectroscopy—An assessment. Remote Sens. Environ. 2009, 113, S123–S137. [Google Scholar] [CrossRef]
- Rogge, D.; Rivard, B.; Segl, K.; Grant, B.; Feng, J. Mapping of NiCu-PGE ore hosting ultramafic rocks using airborne and simulated EnMAP hyperspectral imagery, Nunavik, Canada. Remote Sens. Environ. 2014, 152, 302–317. [Google Scholar] [CrossRef]
- Asner, G.P.; Knapp, D.E.; Kennedy-Bowdoin, T.; Jones, M.O.; Martin, R.E.; Boardman, J.; Hughes, R.F. Invasive species detection in Hawaiian rainforests using airborne imaging spectroscopy and LiDAR. Remote Sens. Environ. 2008, 112, 1942–1955. [Google Scholar] [CrossRef]
- Heiden, U.; Segl, K.; Roessner, S.; Kaufmann, H. Determination of robust spectral features for identification of urban surface materials in hyperspectral remote sensing data. Remote Sens. Environ. 2007, 111, 537–552. [Google Scholar] [CrossRef]
- Clevers, J.; Kooistra, L. Using Hyperspectral Remote Sensing Data for Retrieving Canopy Chlorophyll and Nitrogen Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 574–583. [Google Scholar] [CrossRef]
- Inoue, Y.; Guérif, M.; Frederic, B.; Skidmore, A.; Gitelson, A.; Schlerf, M.; Darvishzadeh, R.; Olioso, A. Simple and robust methods for remote sensing of canopy chlorophyll content: A comparative analysis of hyperspectral data for different types of vegetation. Plant Cell Environ. 2016, 39. [Google Scholar] [CrossRef]
- Schwanghart, W.; Jarmer, T. Linking spatial patterns of soil organic carbon to topography—A case study from south-eastern Spain. Geomorphology 2011, 126, 252–263. [Google Scholar] [CrossRef]
- Stevens, A.; Miralles, I.; van Wesemael, B. Soil organic carbon predictions by airborne imaging spectroscopy: Comparing cross-validation and validation. Soil Sci. Soc. Am. J. 2012, 76, 2174–2183. [Google Scholar] [CrossRef]
- Giardino, C.; Brando, V.E.; Gege, P.; Pinnel, N.; Hochberg, E.; Knaeps, E.; Reusen, I.; Doerffer, R.; Bresciani, M.; Braga, F.; et al. Imaging Spectrometry of Inland and Coastal Waters: State of the Art, Achievements and Perspectives. Surv. Geophys. 2019, 40, 401–429. [Google Scholar] [CrossRef]
- Priem, F.; Canters, F. Synergistic Use of LiDAR and APEX Hyperspectral Data for High-Resolution Urban Land Cover Mapping. Remote Sens. 2016, 8, 787. [Google Scholar] [CrossRef]
- Bayer, A.; Bachmann, M.; Rogge, D.; Müller, A.; Kaufmann, H. Combining Field and Imaging Spectroscopy to Map Soil Organic Carbon in a Semiarid Environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3997–4010. [Google Scholar] [CrossRef]
- Goetz, A.F. Three decades of hyperspectral remote sensing of the Earth: A personal view. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Barnsley, M.; Settle, J.; Cutter, M.; Lobb, D.; Teston, F. The PROBA/CHRIS mission: A low-cost smallsat for hyperspectral multiangle observations of the Earth surface and atmosphere. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1512–1520. [Google Scholar] [CrossRef]
- Tong, Q.; Xue, Y.; Zhang, L. Progress in Hyperspectral Remote Sensing Science and Technology in China Over the Past Three Decades. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 70–91. [Google Scholar] [CrossRef]
- Guo, H.; Dou, C.; Zhang, X.; Han, C.; Yue, X. Earth observation from the manned low Earth orbit platforms. ISPRS J. Photogramm. Remote Sens. 2016, 115, 103–118. [Google Scholar] [CrossRef]
- Guarini, R.; Loizzo, R.; Longo, F.; Mari, S.; Scopa, T.; Varacalli, G. Overview of the prisma space and ground segment and its hyperspectral products. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 431–434. [Google Scholar]
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP spaceborne imaging spectroscopy mission for earth observation. Remote Sens. 2015, 7, 8830–8857. [Google Scholar] [CrossRef]
- Coppo, P.; Taiti, A.; Pettinato, L.; Francois, M.; Taccola, M.; Drusch, M. Fluorescence Imaging Spectrometer (FLORIS) for ESA FLEX Mission. Remote Sens. 2017, 9, 649. [Google Scholar] [CrossRef]
- Nieke, J.; Rast, M. Towards the copernicus hyperspectral imaging mission for the environment (CHIME). In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 23–27 July 2018; pp. 157–159. [Google Scholar]
- Lee, C.; Cable, M.; Hook, S.; Green, R.; Ustin, S.; Mandl, D.; Middleton, E. An introduction to the NASA Hyperspectral InfraRed Imager (HyspIRI) mission and preparatory activities. Remote Sens. Environ. 2015, 167. [Google Scholar] [CrossRef]
- Conticello, S.; Manzillo, P.; Dijk, C.; Vercruyssen, N.; Esposito, M.; Baeck, P.J.; Benhadj, I.; Livens, S.; Delauré, B.; Soukup, M.; et al. Hyperspectral Imaging for real time land and vegetation inspection. In Proceedings of the Small Satellites, System & Services Symposium (4S), Valletta, Malta, 30 May–3 June 2016. [Google Scholar]
- Blommaert, J.; Delauré, B.; Livens, S.; Nuyts, D.; Tack, K.; Lambrechts, A.; Paola, R.D.; Moreau, V.; Callut, E.; Habay, G.; et al. Csimba: Towards a Smart-Spectral Cubesat Constellation. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–1 August 2019. [Google Scholar]
- Matsunaga, T.; Iwasaki, A.; Tsuchida, S.; Iwao, K.; Nakamura, R.; Yamamoto, H.; Kato, S.; Obata, K.; Kashimura, O.; Tanii, J.; et al. HISUI status toward FY2019 launch. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Lukashin, C.; Jin, Z.; Kopp, G.; MacDonnell, D.G.; Thome, K. CLARREO Reflected Solar Spectrometer: Restrictions for Instrument Sensitivity to Polarization. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6703–6709. [Google Scholar] [CrossRef]
- Müller, R.; Avbelj, J.; Carmona, E.; Gerasch, B.; Graham, L.; Günther, B.; Heiden, U.; Kerr, G.; Knodt, U.; Krutz, D.; et al. The New Hyperspectral Sensor DESIS on the Multi-Payload Platform MUSES Installed on the ISS. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 461–467. [Google Scholar] [CrossRef]
- Krutz, D.; Müller, R.; Knodt, U.; Günther, B.; Walter, I.; Sebastian, I.; Säuberlich, T.; Reulke, R.; Carmona, E.; Eckardt, A.; et al. The Instrument Design of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors 2019, 19, 1622. [Google Scholar] [CrossRef] [PubMed]
- Perkins, R.; Galloway, P.; Miller, R.; Graham, L. Teledyne’s muses mission on the ISS: Enabling flexible and reconfigurable earth observation from space. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1177–1180. [Google Scholar]
- Jilge, M.; Heiden, U.; Neumann, C.; Feilhauer, H. Gradients in urban material composition: A new concept to map cities with spaceborne imaging spectroscopy data. Remote Sens. Environ. 2019, 223, 179–193. [Google Scholar] [CrossRef]
- Dekker, A.G.; Pinnel, N.; Gege, P.; Giardino, C.; Briottet, X.; Court, A.; Peters, S.; Turpie, K.; Sterckx, S.; Costa, M.; et al. Feasibility study for an aquatic ecosystem earth observing system. In Proceedings of the 11th Earsel SIG IS Workshop, Brno, Czech Republic, 6–8 February 2019. [Google Scholar]
- Hay, M.E.; Fenical, W. Chemical ecology and marine biodiversity: Insights and products from the sea. Oceanogr. Wash. Oceanogr. Soc. 1996, 9, 10–20. [Google Scholar] [CrossRef]
- Turpie, K.; Allen, D.W.; Ackelson, S.; Bell, T.; Dierssen, H.; Cavanaugh, K.; Fisher, J.B.; Goodman, J.; Guild, L.; Hochberg, E.; et al. New Need to Understand Changing Coastal and Inland Aquatic Ecosystem Services; NASA Earth Science Division: Greenbelt, MD, USA, 2015; p. 11.
- Hestir, E.L.; Brando, V.E.; Bresciani, M.; Giardino, C.; Matta, E.; Villa, P.; Dekker, A.G. Measuring freshwater aquatic ecosystems: The need for a hyperspectral global mapping satellite mission. Remote Sens. Environ. 2015, 167, 181–195. [Google Scholar] [CrossRef]
- Muller-Karger, F.E.; Hestir, E.; Ade, C.; Turpie, K.; Roberts, D.A.; Siegel, D.; Miller, R.J.; Humm, D.; Izenberg, N.; Keller, M.; et al. Satellite sensor requirements for monitoring essential biodiversity variables of coastal ecosystems. Ecol. Appl. 2018, 28, 749–760. [Google Scholar] [CrossRef] [PubMed]
- Bernard, S.; Binding, C.; Brockmann, C.; Dekker, A.; DiGiacomo, P.; Greb, S.; Griffith, D.; Groom, S.; Hestir, E.; Hunter, P.; et al. Earth Observations in Support of Global Water Quality Monitoring; Vol. IOCCG Report 17; Reports and Monographs of the International Ocean Colour Coordinating Group; International Ocean-Colour Coordinating Group: Dartmouth, NS, Canada, 2018. [Google Scholar]
- Mouw, C.B.; Greb, S.; Aurin, D.; DiGiacomo, P.M.; Lee, Z.; Twardowski, M.; Binding, C.; Hu, C.; Ma, R.; Moore, T.; et al. Aquatic color radiometry remote sensing of coastal and inland waters: Challenges and recommendations for future satellite missions. Remote Sens. Environ. 2015, 160, 15–30. [Google Scholar] [CrossRef]
- Brando, V.E.; Dekker, A.G. Satellite hyperspectral remote sensing for estimating estuarine and coastal water quality. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1378–1387. [Google Scholar] [CrossRef]
- Giardino, C.; Brando, V.E.; Dekker, A.G.; Strombeck, N.; Candiani, G. Assessment of water quality in Lake Garda (Italy) using Hyperion. Remote Sens. Environ. 2007, 109, 183–195. [Google Scholar] [CrossRef]
- Pinnel, N.; Gege, P.; Göritz, A. Sensitivity study for aquatic ecosystem monitoring with the DESIS hyperspectral sensor. In Proceedings of the WHISPERS 2018, Amsterdam, The Netherlands, 23–26 September 2018. [Google Scholar]
- Gege, P.; Pinnel, N. Sources of variance of downwelling irradiance in water. Appl. Opt. 2011, 50, 2192–2203. [Google Scholar] [CrossRef]
- Santini, F.; Alberotanza, L.; Cavalli, R.M.; Pignatti, S. A two-step optimization procedure for assessing water constituent concentrations by hyperspectral remote sensing techniques: An application to the highly turbid Venice lagoon waters. Remote Sens. Environ. 2010, 114, 887–898. [Google Scholar] [CrossRef]
- Gege, P. Chapter 2—Radiative Transfer Theory for Inland Waters. In Bio-Optical Modeling and Remote Sensing of Inland Waters; Mishra, D.R., Ogashawara, I., Gitelson, A.A., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 25–67. [Google Scholar]
- Olmanson, L.G.; Bauer, M.E.; Brezonik, P.L. A 20-year Landsat water clarity census of Minnesota’s 10,000 lakes. Remote Sens. Environ. 2008, 112, 4086–4097. [Google Scholar] [CrossRef]
- Matthews, M.W.; Odermatt, D. Improved algorithm for routine monitoring of cyanobacteria and eutrophication in inland and near-coastal waters. Remote Sens. Environ. 2015, 156, 374–382. [Google Scholar] [CrossRef]
- Pinnel, N. A Method for Mapping Submerged Macrophytes in Lakes Using Hyperspectral Remote Sensing. Ph.D. Thesis, Technische Universität München, München, Germany, 2007. [Google Scholar]
- Teague, J.; Willans, J.; Allen, M.; Scott, T.; Day, J. Applied marine hyperspectral imaging; Coral Bleaching from a spectral viewpoint. Spectrosc. Eur. 2019, 31, 13–17. [Google Scholar]
- Nolin, A.W.; Dozier, J. A Hyperspectral Method for Remotely Sensing the Grain Size of Snow. Remote Sens. Environ. 2000, 74, 207–216. [Google Scholar] [CrossRef]
- Lau, W.K.M.; Kim, M.K.; Kim, K.M.; Lee, W.S. Enhanced surface warming and accelerated snow melt in the Himalayas and Tibetan Plateau induced by absorbing aerosols. Environ. Res. Lett. 2010, 5, 025204. [Google Scholar] [CrossRef]
- Qian, Y.; Flanner, M.G.; Leung, L.R.; Wang, W. Sensitivity studies on the impacts of Tibetan Plateau snowpack pollution on the Asian hydrological cycle and monsoon climate. Atmos. Chem. Phys. 2011, 11, 1929–1948. [Google Scholar] [CrossRef]
- Hansen, J.; Nazarenko, L. Soot climate forcing via snow and ice albedos. Proc. Natl. Acad. Sci. USA 2004, 101, 423–428. [Google Scholar] [CrossRef]
- Dozier, J.; Green, R.O.; Nolin, A.W.; Painter, T.H. Interpretation of snow properties from imaging spectrometry. Remote Sens. Environ. 2009, 113, S25–S37. [Google Scholar] [CrossRef]
- Painter, T.H.; Barrett, A.P.; Landry, C.C.; Neff, J.C.; Cassidy, M.P.; Lawrence, C.R.; McBride, K.E.; Farmer, G.L. Impact of disturbed desert soils on duration of mountain snow cover. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Painter, T.; Seidel, F.; Bryant, A.; McKenzie Skiles, S.; Rittger, K. Imaging spectroscopy of albedo and radiative forcing by light-absorbing impurities in mountain snow. J. Geophys. Res. Atmos. 2013, 118, 9511–9523. [Google Scholar] [CrossRef]
- Painter, T.H.; Berisford, D.F.; Boardman, J.W.; Bormann, K.J.; Deems, J.S.; Gehrke, F.; Hedrick, A.; Joyce, M.; Laidlaw, R.; Marks, D.; et al. The Airborne Snow Observatory: Fusion of scanning lidar, imaging spectrometer, and physically-based modeling for mapping snow water equivalent and snow albedo. Remote Sens. Environ. 2016, 184, 139–152. [Google Scholar] [CrossRef]
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.R.; Dubayah, R. The GEDI Simulator: A Large-Footprint Waveform Lidar Simulator for Calibration and Validation of Spaceborne Missions. Earth Space Sci. 2019, 6, 294–310. [Google Scholar] [CrossRef] [PubMed]
- Kattge, J.; Diaz, S.; Lavorel, S.; Prentice, I.C.; Leadley, P.; Bönisch, G.; Granier, E.; Westoby, M.; Reich, P.B.; Wright, I.J.; et al. TRY—A global database of plant traits. Glob. Chang. Biol. 2011, 17, 2905–2935. [Google Scholar] [CrossRef]
- Van Bodegom, P.M.; Douma, J.C.; Witte, J.P.M.; Ordoñez, J.C.; Bartholomeus, R.P.; Aerts, R. Going beyond limitations of plant functional types when predicting global ecosystems atmosphere fluxes: Exploring the merits of traits-based approaches. Glob. Ecol. Biogeogr. 2012, 21, 625–636. [Google Scholar] [CrossRef]
- Gamon, J.A.; Somers, B.; Malenovský, Z.; Middleton, E.M.; Rascher, U.; Schaepman, M.E. Assessing Vegetation Function with Imaging Spectroscopy. Surv. Geophys. 2019, 40, 489–513. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E.; Anderson, C.B.; Knapp, D.E. Quantifying forest canopy traits: Imaging spectroscopy versus field survey. Remote Sens. Environ. 2015, 158, 15–27. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.; Guillén-Climent, M.; Hernández-Clemente, R.; Catalina, A.; González, M.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]
- Serrano, L.; Ustin, S.L.; Roberts, D.A.; Gamon, J.A.; Penyuelas, J. Deriving Water Content of Chaparral Vegetation from AVIRIS Data. Remote Sens. Environ. 2000, 74, 570–581. [Google Scholar] [CrossRef]
- Hank, T.B.; Bach, H.; Mauser, W. Using a Remote Sensing-Supported Hydro-Agroecological Model for Field-Scale Simulation of Heterogeneous Crop Growth and Yield: Application for Wheat in Central Europe. Remote Sens. 2015, 7, 3934–3965. [Google Scholar] [CrossRef]
- Schlerf, M.; Buddenbaum, H.; Vohland, M.; Werner, W.; Dong, P.; Hill, J.; Erasmi, S.; Cuffka, B.; Kappas, M. Assessment of forest productivity using an ecosystem process model, remotely sensed LAI maps and FIELD data. In Proceedings of the 1st Göttingen GIS & Remote Sensing Days: Environmental Studies, Göttingen, Germany, 7–8 October 2004. [Google Scholar]
- Smith, M.L.; Ollinger, S.V.; Martin, M.E.; Aber, J.D.; Hallett, R.A.; Goodale, C.L. Direct estimation of aboveground forest productivity through hyperspectral remote sensing of canopy nitrogen. Ecol. Appl. 2002, 12, 1286–1302. [Google Scholar] [CrossRef]
- Kindermann, G.; McCallum, I.; Fritz, S.; Obersteiner, M. A global forest growing stock, biomass and carbon map based on FAO statistics. Silva Fenn. 2008, 42, 387–396. [Google Scholar] [CrossRef]
- Hickler, T.; Smith, B.; Sykes, M.T.; Davis, M.B.; Sugita, S.; Walker, K. Using a generalized vegetation model to simulate vegetation dynamics in northeastern USA. Ecology 2004, 85, 519–530. [Google Scholar] [CrossRef]
- Huemmrich, K.F.; Campbell, P.K.E.; Gao, B.; Flanagan, L.B.; Goulden, M. ISS as a Platform for Optical Remote Sensing of Ecosystem Carbon Fluxes: A Case Study Using HICO. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4360–4375. [Google Scholar] [CrossRef]
- Verrelst, J.; Malenovský, Z.; Van der Tol, C.; Camps-Valls, G.; Gastellu-Etchegorry, J.P.; Lewis, P.; North, P.; Moreno, J. Quantifying Vegetation Biophysical Variables from Imaging Spectroscopy Data: A Review on Retrieval Methods. Surv. Geophys. 2019, 40, 589–629. [Google Scholar] [CrossRef]
- Lee, K.S.; Cohen, W.B.; Kennedy, R.E.; Maiersperger, T.K.; Gower, S.T. Hyperspectral versus multispectral data for estimating leaf area index in four different biomes. Remote Sens. Environ. 2004, 91, 508–520. [Google Scholar] [CrossRef]
- Ustin, S.L.; Zarco-tejada, P.J.; Asner, G.P. The Role of Hyperspectral Data in Understanding the Global Carbon Cycle; AVIRIS Workshop: Pasadena, CA, USA, 2001.
- Hank, T.B.; Berger, K.; Bach, H.; Clevers, J.G.P.W.; Gitelson, A.; Zarco-Tejada, P.; Mauser, W. Spaceborne Imaging Spectroscopy for Sustainable Agriculture: Contributions and Challenges. Surv. Geophys. 2019, 40, 515–551. [Google Scholar] [CrossRef]
- FAO; ITPS. Status of the World’s Soil Resources (SWSR)—Main Report. 2015. Available online: http://www.fao.org/3/a-i5126e.pdf (accessed on 14 October 2019).
- Jeffery, S.; Hiederer, R.; Lükewille, A.; Strassburger, T.; Panagos, P.; Hervás, J.; Barcelo, S.; Jones, A.; Yigini, Y.; Erhard, M.; et al. A Contribution of the JRC to the European Environment Agency’s; Environment State and Outlook Report—SOER 2010—Study; JRC: Tokyo, Japan, 2010; pp. 1–72. [Google Scholar]
- Nocita, M.; Stevens, A.; van Wesemael, B.; Aitkenhead, M.; Bachmann, M.; Barthes, B.; Ben-Dor, E.; Brown, D.; Clairotte, M.; Csorba, A.; et al. Spectroscopy: An Alternative to Wet Chemistry for Soil Monitoring. In Advances in Agronomy; Academic Press: Cambridge, MA, USA, 2015; pp. 139–159. [Google Scholar]
- Ben-Dor, E.; Chabrillat, S.; Demattê, J.; Taylor, G.; Hill, J.; Whiting, M.; Sommer, S. Using imaging spectroscopy to study soil properties. Remote Sens. Environ. 2009, 113, S38–S55. [Google Scholar] [CrossRef]
- Chabrillat, S.; Ben-Dor, E.; Cierniewski, J.; Gomez, C.; Schmid, T.; van Wesemael, B. Imaging Spectroscopy for Soil Mapping and Monitoring. Surv. Geophys. 2019, 40, 361–399. [Google Scholar] [CrossRef]
- Chabrillat, S.; Guillaso, S.; Rabe, A.; Foerster, S.; Guanter, L. From HYSOMA to ENSOMAP—A new open source tool for quantitative soil properties mapping based on hyperspectral imagery from airborne to spaceborne applications. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 17–22 April 2016. [Google Scholar]
- Carmon, N.; Ben-Dor, E. An advanced analytical approach for spectral-based modelling of soil properties. Int. J. Emerg. Technol. Adv. Eng. 2017, 7, 90–97. [Google Scholar]
- Schmid, T.; Rastrero, M.; Escribano, P.; Palacios-Orueta, A.; Ben-Dor, E.; Plaza, A.; Milewski, R.; Huesca, M.; Bracken, A.; Cicuendez, V.; et al. Characterization of Soil Erosion Indicators Using Hyperspectral Data From a Mediterranean Rainfed Cultivated Region. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 845–860. [Google Scholar] [CrossRef]
- Palacios-Orueta, A.; Pinzon, J.E.; Ustin, S.L.; Roberts, D.A. Remote sensing of soils in the Santa Monica Mountains: II. Hierarchical foreground and background analysis. Remote Sens. Environ. 1999, 68, 138–151. [Google Scholar] [CrossRef]
- Gomez, C.; Oltra-Carrio, R.; Bacha, S.; Lagacherie, P.; Briottet, X. Sensitivity of Soil Property Prediction Obtained from Hyperspectral Vis-NIR Imagery to Atmospheric Effects and Degradation in Image Spatial Resolutions. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 15–16 May 2014. [Google Scholar]
- Bartholomeus, H.; Kooistra, L.; Stevens, A.; van Leeuwen, M.; van Wesemael, B.; Ben-Dor, E.; Tychon, B. Soil organic carbon mapping of partially vegetated agricultural fields with imaging spectroscopy. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 81–88. [Google Scholar] [CrossRef]
- Stevens, A.; Nocita, M.; Toth, G.; Montanarella, L.; van Wesemael, B. Prediction of Soil Organic Carbon at the European Scale by Visible and Near InfraRed Reflectance Spectroscopy. PLoS ONE 2013, 8, e66409. [Google Scholar] [CrossRef] [PubMed]
- Gomez, C.; Rossel, R.A.V.; McBratney, A.B. Soil organic carbon prediction by hyperspectral remote sensing and field vis-NIR spectroscopy: An Australian case study. Geoderma 2008, 146, 403–411. [Google Scholar] [CrossRef]
- Ben-Dor, E.; Patkin, K.; Banin, A.; Karnieli, A. Mapping of several soil properties using DAIS-7915 hyperspectral scanner data—A case study over clayey soils in Israel. Int. J. Remote Sens. 2002, 23, 1043–1062. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, X.; Wang, C.; Li, Y.; Shi, R. Predicting soil salinity with Vis–NIR spectra after removing the effects of soil moisture using external parameter orthogonalization. PLoS ONE 2015, 10, e0140688. [Google Scholar] [CrossRef]
- Haubrock, S.N.; Chabrillat, S.; Lemmnitz, C.; Kaufmann, H. Surface soil moisture quantification models from reflectance data under field conditions. Int. J. Remote Sens. 2008, 29, 3–29. [Google Scholar] [CrossRef]
- Cierniewski, J. A model for soil surface roughness influence on the spectral response of bare soils in the visible and near-infrared range. Remote Sens. Environ. 1987, 23, 97–115. [Google Scholar] [CrossRef]
- Labarre, S.; Jacquemoud, S.; Ferrari, C.; Delorme, A.; Derrien, A.; Grandin, R.; Jalludin, M.; Lemaître, F.; Métois, M.; Pierrot-Deseilligny, M.; et al. Retrieving soil surface roughness with the Hapke photometric model: Confrontation with the ground truth. Remote Sens. Environ. 2019, 225, 1–15. [Google Scholar] [CrossRef]
- Yamamoto, H.; Obata, K.; Tsuchida, S.; Kerr, G.H.G.; Bachmann, M. Cross-sensor calibration and validation between DESIS and HUSUI on the international space station (ISS). In Proceedings of the IGARSS 2016, Beijing, China, 11–15 July 2016; pp. 1928–1930. [Google Scholar]
- Heiden, U.; Müller, R. DESIS Mission. Available online: https://www.dlr.de/eoc/desktopdefault.aspx/tabid-13614 (accessed on 15 September 2019).
- Geospatial Solutions. Available online: https://https://tbe.com/geospatial/MUSES (accessed on 15 September 2019).
- Optical Etaloning in Charge Coupled Devices. Available online: https://andor.oxinst.com/learning/view/article/optical-etaloning-in-charge-coupled-devices (accessed on 15 September 2019).
- Hu, B.; Zhang, J.; Cao, K.; Hao, S.; Sun, D.; Liu, Y. Research on the Etalon Effect in Dispersive Hyperspectral VNIR Imagers Using Back-Illuminated CCDs. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5481–5494. [Google Scholar] [CrossRef]
- Müller, R.; Krauß, T.; Schneider, M.; Reinartz, P. Automated Georeferencing of Optical Satellite Data with Integrated Sensor Model Improvement. Photogramm. Eng. Remote Sens. 2012, 78, 61–74. [Google Scholar] [CrossRef]
- Muller, R.; Lehner, M.; Muller, R.; Reinartz, P.; Schroeder, M.; Vollmer, B. A program for direct georeferencing of airborne and spaceborne line scanner images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 148–153. [Google Scholar]
- Rengarajan, R.; Sampath, A.; Storey, J.; Choate, M. Validation of Geometric Accuracy of Global Land Survey (GLS) 2000 Data. Photogramm. Eng. Remote Sens. 2015, 81, 131–141. [Google Scholar] [CrossRef]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 7 November 2011; pp. 2548–2555. [Google Scholar]
- Lehner, M. Stereoscopic evaluation of combined stereoscopic (Along-Track) and multispectral data of the MOMS-02 Sensor. In Proceedings of the ISPRS Commission III Symposium: Spatial Information from Digital Photogrammetry and Computer Vision, Munich, Germany, 17 August 1994; pp. 483–490. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- De los Reyes, R.; Richter, R.; Langheinrich, M.; Pflug, B.; Schwind, P. Validation of a New Atmospheric Correction Software Using AERONET Reference Data. Available online: https://earth.esa.int/documents/700255/3506752/Poster27_Validation_AC_LPVE_v04.pdf (accessed on 14 October 2019).
- Richter, R. Correction of satellite imagery over mountainous terrain. Appl. Opt. 1998, 37, 4004–4015. [Google Scholar] [CrossRef]
- Doxani, G.; Vermote, E.; Roger, J.C.; Gascon, F.; Adriaensen, S.; Frantz, D.; Hagolle, O.; Hollstein, A.; Kirches, G.; Li, F.; et al. Atmospheric Correction Inter-Comparison Exercise. Remote Sens. 2018, 10, 352. [Google Scholar] [CrossRef]
- Berk, A. MODTRAN 5.4.0 User’s Manual. 2016. Available online: ftp://ftp.pmodwrc.ch/stealth/132250_claus/MODTRAN5/Manual/MODTRAN(R)5.2.0.0.pdf (accessed on 14 October 2019).
- Fontenla, J.M.; Harder, J.; Livingston, W.; Snow, M.; Woods, T. High-resolution solar spectral irradiance from extreme ultraviolet to far infrared. J. Geophys. Res. 2011, 116, D20108. [Google Scholar] [CrossRef]
- Wan, Z.; Hook, S.H.G. NASA EOSDIS LP DAAC. Available online: https://doi.org/10.5067/MODIS/MYD11C2 (accessed on 25 October 2019).
- Richter, R.; Schläpfer, D.; Müller, A. An automatic atmospheric correction algorithm for visible/NIR imagery. Int. J. Remote Sens. 2006, 27, 2077–2085. [Google Scholar] [CrossRef]
- Schläpfer, D.; Borel, C.C.; Keller, J.; Itten, K.I. Atmospheric Precorrected Differential Absorption Technique to Retrieve Columnar Water Vapor. Remote Sens. Environ. 1998, 65, 353–366. [Google Scholar] [CrossRef]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X.; Xiong, X.; Blackwell, W.J. Overview of Intercalibration of Satellite Instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Sterckx, S.; Benhadj, I.; Duhoux, G.; Livens, S.; Dierckx, W.; Goor, E.; Adriaensen, S.; Heyns, W.; Hoof, K.V.; Strackx, G.; et al. The PROBA-V mission: Image processing and calibration. Int. J. Remote Sens. 2014, 35, 2565–2588. [Google Scholar] [CrossRef]
- RadCalNet Portal. Available online: https://www.radcalnet.org/ (accessed on 5 September 2019).
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.; Mandel, H. The Solar Spectral Irradiance from 200 to 2400 nm as Measured by the SOLSPEC Spectrometer from the Atlas and Eureca Missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- CEOS Recommended Solar Irradiance Spectrum for Use in Earth Observation Applications. Available online: https://eocalibration.wordpress.com/2006/12/15/ceos-recommended-solar-irradiance-spectrum-for-use-in-earth-observation-applications/ (accessed on 5 September 2019).
- Jing, X.; Leigh, L.; Pinto, C.T.; Helder, D. Evaluation of RadCalNet Output Data Using Landsat 7, Landsat 8, Sentinel 2A, and Sentinel 2B Sensors. Remote Sens. 2019, 11, 541. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 operational land imager radiometric calibration and stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Li, S.; Ganguly, S.; Dungan, J.L.; Wang, W.; Nemani, R.R. Sentinel-2 MSI radiometric characterization and cross-calibration with Landsat-8 OLI. Adv. Remote Sens. 2017, 6, 147. [Google Scholar] [CrossRef]
- Janesick, J.R. Photon Transfer; SPIE Press: Bellingham, WA, USA, 2007; Volume PM170. [Google Scholar]
- Ponomarenko, N.N.; Lukin, V.V.; Zriakhov, M.S.; Kaarna, A.; Astola, J. Automatic Approaches to On-Land/On-Board Filtering and Lossy Compression of AVIRIS Images. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; Volume 3, pp. III-254–III-257. [Google Scholar]
- Rao, K.R.; Yip, P. Discrete Cosine Transform: Algorithms, Advantages, Applications; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Taylor, J. Error Analysis; University Science Books: Sausalito, CA, USA, 2009. [Google Scholar]
- Sebastian, I.; Krutz, D.; Eckardt, A.; Venus, H.; Walter, I.; Günther, B.; Neidhardt, M.; Reulke, R.; Müller, R.; Uhlig, M.; et al. On-Ground Calibration of DESIS: DLRś Earth Sensing Imaging Spectrometer for the International Space Station ISS. In Proceedings of the SPIE Photonics Europe 2018, Strasbourg, France, 22–26 April 2018. [Google Scholar]
- Guanter, L.; Richter, R.; Moreno, J. Spectral calibration of hyperspectral imagery using atmospheric absorption features. Appl. Opt. 2006, 45, 2360–2370. [Google Scholar] [CrossRef]
- Thompson, D.R.; Boardman, J.W.; Eastwood, M.L.; Green, R.O.; Haag, J.M.; Mouroulis, P.; Gorp, B.V. Imaging spectrometer stray spectral response: In-flight characterization, correction, and validation. Remote Sens. Environ. 2018, 204, 850–860. [Google Scholar] [CrossRef]
- Bachmann, M.; Müller, R.; Schneider, M.; Walzel, T.; Habermeyer, M.; Storch, T.; Kaufmann, H.; Segl, K.; Rogass, C. Data Quality Assurance for hyperspectral L1 and L2 products—Cal/Val/Mon procedures within the EnMAP Ground Segment. In Proceedings of the LPVE Workshop, Frascati, Italy, 28–30 January 2014. [Google Scholar]
- Kardan, N.; Dabney, P.; Babu, S. Landsat Missions to Sustainable Land Imaging Technology Program. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 23–27 July 2018; pp. 6336–6337. [Google Scholar]
- Storey, J.C. Landsat 7 On-Orbit Modulation Transfer Function Estimation. Sens. Syst. Next-Gener. Satell. V 2001, 4540, 50–61. [Google Scholar]
- Pagnutti, M.; Blonski, S.; Cramer, M.; Helder, D.; Holekamp, K.; Honkavaara, E.; Ryan, R. Targets, methods, and sites for assessing the in-flight spatial resolution of electro-optical data products. Can. J. Remote Sens. 2010, 36, 583–601. [Google Scholar] [CrossRef]
- Holben, B.; Eck, T.; Slutsker, I.; Tanré, D.; Buis, J.; Setzer, A.; Vermote, E.; Reagan, J.; Kaufman, Y.; Nakajima, T.; et al. AERONET—A Federated Instrument Network and Data Archive for Aerosol Characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Richter, R.; Schlapfer, D. Considerations on Water Vapor and Surface Reflectance Retrievals for a Spaceborne Imaging Spectrometer. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1958–1966. [Google Scholar] [CrossRef]
- Obregón, M.; Rodrigues, G.; Costa, M.; Potes, M.; Silva, A. Validation of ESA Sentinel-2 L2A Aerosol Optical Thickness and Columnar Water Vapour during 2017–2018. Remote Sens. 2019, 11, 1649. [Google Scholar] [CrossRef]
- CEOS Reference: QA4EO-WGCV-IVO-CSP-002-LCFR. Available online: https://www.radcalnet.org/sites/LCFR/documentation/Site%20documentation/QA4EO-WGCV-IVO-CSP-002_LCFR_20180405.pdf (accessed on 14 October 2019).
- CEOS Reference: QA4EO-WGCV-IVO-CSP-002-RVUS. Available online: https://www.radcalnet.org/sites/RVUS/documentation/Site%20documentation/QA4EO-WGCV-IVO-CSP-002_RVUS_20180404.pdf (accessed on 14 October 2019).
- CEOS Reference: QA4EO-WGCV-IVO-CSP-002-GONA. Available online: https://www.radcalnet.org/sites/GONA/documentation/Site%20documentation/QA4EO-WGCV-IVO-CSP-002_GONA_20180405.pdf (accessed on 14 October 2019).
- Platnick, S.; King, M.; Hubanks, P. MODIS Atmosphere L3 Eight-Day Product. NASA MODIS Adaptive Processing System, Goddard Space Flight Center. Available online: https://doi.org/10.5067/MODIS/MOD08_E3.006 (accessed on 9 March 2015).
- Saunier, S.; Mannan, R.; Schwind, P.; Mueller, R.; Storch, T.; Biasutti, R.; Gascon, F.; Goryl, P.; Meloni, M. Bulk reprocessing of the ALOS PRISM/AVNIR-2 archive of the European Space Agency: Level 1 orthorectified data processing and data quality evaluation. In Proceedings of the Image and Signal Processing for Remote Sensing XXIV, Berlin, Germany, 10–12 September 2018; Volume 10789, p. 1078906. [Google Scholar]
- Bieniarz, J.; Müller, R.; Zhu, X.X.; Reinartz, P. Hyperspectral image resolution enhancement based on joint sparsity spectral unmixing. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2645–2648. [Google Scholar]
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A comparative review of the recent literature. IEEE Geosci. Remote Sens. Mag. 2017, 5, 29–56. [Google Scholar] [CrossRef]
- Yokoya, N.; Yairi, T.; Iwasaki, A. Coupled Nonnegative Matrix Factorization Unmixing for Hyperspectral and Multispectral Data Fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 528–537. [Google Scholar] [CrossRef]
- Yokoya, N.; Mayumi, N.; Iwasaki, A. Cross-Calibration for Data Fusion of EO-1/Hyperion and Terra/ASTER. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 419–426. [Google Scholar] [CrossRef]
- Kruse, F.A.; Lefkoff, A.; Boardman, J.; Heidebrecht, K.; Shapiro, A.; Barloon, P.; Goetz, A. The spectral image processing system (SIPS)—Interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Type | Description | Order Parameters |
|---|---|---|
| L1B | Radiometric and sensor specific corrected data | Spectral Binning |
| Top of Atmosphere (TOA) radiance (mW·cm·sr·μm) | ||
| All metadata attached for further processing | ||
| L1C | L1B data orthorectified and resampled to a specified grid | Map Projection Resampling |
| using global SRTM 1 arcsec DEM for terrain correction | ||
| using global Landsat ETM+ references for sensor model refinement | ||
| L2A | L1C data atmospherically corrected (reflectance) | Terrain Correction Ozone Column |
| using global SRTM 1 arcsec DEM for topographic correction | ||
| generating several masks (water, land, cloud, shadow, …) |
| Defect | Description |
|---|---|
| Unreliable Calibration | Focal plane element whose characterization is flagged as unreliable during on-board calibration. |
| Manufacturing Defects | Focal Plane element whose characterization on-ground was not nominal. |
| No Data | Pixel containing no information. This type of abnormal pixel only appears on initial and final tiles of a data-take due to the lack of data when L1A processor produces the tile overlap. |
| Low Radiance | Pixel flagged by the quality monitoring due to an abnormal low radiance value. |
| High Radiance | Pixel flagged by the quality monitoring due to abnormal high radiance. |
| Suspicious Pixel | Pixel flagged by the on-board calibration processor as not nominal but its response is yet under investigation. |
| Dead | Pixel which produces no response. |
| Layer | Description |
|---|---|
| 1 | Shadows: mask flagging those pixels identified as cloud and topographic shadows. |
| The latest is not included if the user process the image without TerrainCorrection option. | |
| 2 | Clear land: pixels flagged in this mask have not been identified neither as water, nor as cloud pixels. |
| 3 | Snow |
| 4 | Haze over land |
| 5 | Haze over water |
| 6 | Cloud over land: this actually contains all cloud pixels |
| 7 | Cloud over water: this layer is only filled when an external water mask is provided |
| 8 | Clear water: water detected pixels not flagged as haze |
| 9 | Aerosol Optical Thickness (at 550 nm) |
| 10 | Water Vapor (in cm) |
| DESIS Scene | Date | SZA | VZA | L2A Quicklook | RadCalNet Output Version |
|---|---|---|---|---|---|
| RVUS, Tile 2 | 13 December 2018 | 64.0 | 0.8 | Figure 8 | 2.04 |
| GONA, Tile 2 | 4 February 2019 | 35.3 | 3.9 | Figure 9 | 2.02 |
| RVUS, Tile 3 | 28 June 2019 | 19.0 | 3.4 | Figure 10 | 2.04 |
| Site | Date | Lat/Lon () | Sensor | Time | Zenith Angle () | |||
|---|---|---|---|---|---|---|---|---|
| Difference | Sensor | Solar | ||||||
| (min) | DESIS | L8/S2 | DESIS | L8/S2 | ||||
| Libya 2 | 8 December 2018 | 25.05, 20.48 | L8 | 64 | 14.2 | 4.9 | 48.1 | 51.5 |
| White Sands | 10 October 2018 | 32.92, −106.35 | L8 | 58 | 8.3 | 0.5 | 40.5 | 43.6 |
| Barreal Blanco | 12 March 2019 | −31.86, −69.45 | L8 | 45 | 1.0 | 6.3 | 35.5 | 43.1 |
| Gobabeb | 4 February 2019 | −23.6, 15.12 | S2B | 17 | 3.9 | 4.9 | 35.3 | 28.3 |
| Gobi Desert | 11 February 2019 | 40.13, 94.34 | S2A | 18 | 10.4 | 7.4 | 56.5 | 57.3 |
| Libya 4 | 4 November 2018 | 28.55, 23.39 | S2A | 20 | 26.2 | 5.4 | 49.8 | 46.2 |
| Libya 4 | 3 January 2019 | 28.55, 23.39 | S2A | 28 | 3.4 | 5.7 | 58.1 | 54.8 |
| Baotou | 13 February 2019 | 40.85, 109.63 | S2A | 25 | 7.0 | 7.5 | 59.8 | 57.3 |
| Atacama, Chile | 10 March 2019 | −22.49, −69.11 | S2A | 37 | 3.3 | 6.1 | 27.6 | 33.8 |
| Barreal Blanco | 12 March 2019 | −32.86, −69.45 | S2B | 36 | 1.0 | 9.3 | 35.5 | 41.1 |
| Statistic | Coastal Aerosol | Blue | Green | Red | NIR |
|---|---|---|---|---|---|
| (∼443 nm) | (∼482 nm) | (∼562 nm) | (∼655 nm) | (∼865 nm) | |
| Difference (%) | 0.50 | 0.54 | −0.08 | −0.04 | −0.31 |
| Standard Deviation | 2.77 | 2.13 | 1.86 | 1.92 | 1.76 |
| Band | Lab. cal. | Vic. cal. | ||
|---|---|---|---|---|
| No Smile corr. | Smile corr. | No Smile corr. | Smile corr. | |
| 141 (∼760 nm) | −0.52 | −0.46 | 0.19 | 0.26 |
| 143 (∼765 nm) | −0.52 | −0.46 | −0.09 | −0.02 |
| 146 (∼773 nm) | −0.53 | −0.45 | −0.37 | −0.29 |
| Band | Cross-Track Element | |||||
|---|---|---|---|---|---|---|
| 10 | 256 | 512 | 768 | 1014 | ||
| 141 | Nominal | 761.31 | 761.13 | 760.63 | 760.46 | 759.81 |
| Validation | 760.51 | 760.41 | 760.76 | 760.46 | 760.11 | |
| 143 | Nominal | 765.81 | 765.57 | 765.32 | 765.13 | 765.05 |
| Validation | 765.45 | 765.35 | 765.70 | 765.40 | 765.04 | |
| 146 | Nominal | 773.45 | 773.18 | 772.83 | 772.53 | 771.90 |
| Validation | 773.18 | 773.08 | 773.43 | 773.13 | 772.78 | |
| (Easting) | (Northing) |
|---|---|
| 21.0 ± 5.9 m | 21.4 ± 6.0 m |
| RadcalNet Site | Coordinates (°) | Extension | Site Variability | |
|---|---|---|---|---|
| Name | lon | lat | (km × km) | (%) |
| Railroad Valley (RVUS) | 38.497 | −115.690 | 1.0 | 1.5 |
| Gobabeb (GONA) | 15.120 | −23.600 | 0.5 | 3 |
| Manufacturing Defects | ||
|---|---|---|
| Band | Cross-Track Elements | Defect Type |
| 1 | 1–280, 1008–1024 | Manufacturing Defect |
| 2 | 1–229, 1016–1024 | |
| 3 | 1–150, 1021–1024 | |
| 4 | 1–150 | |
| 5 | 1–42 | |
| 6 | 1–30 | |
| 7 | 1–30 | |
| 8 | 140 | Dead Pixel |
| 9 | 140 | |
| 19 | 217 | |
| 23 | 277, 887 | |
| 24 | 103, 733 | |
| 34 | 802, 803 | |
| 50 | 728 | |
| 53 | 99 | |
| 54 | 99 | |
| 57 | 37 | |
| 69 | 836 | |
| 70 | 836 | |
| 220 | 619 | |
| 221 | 619 | |
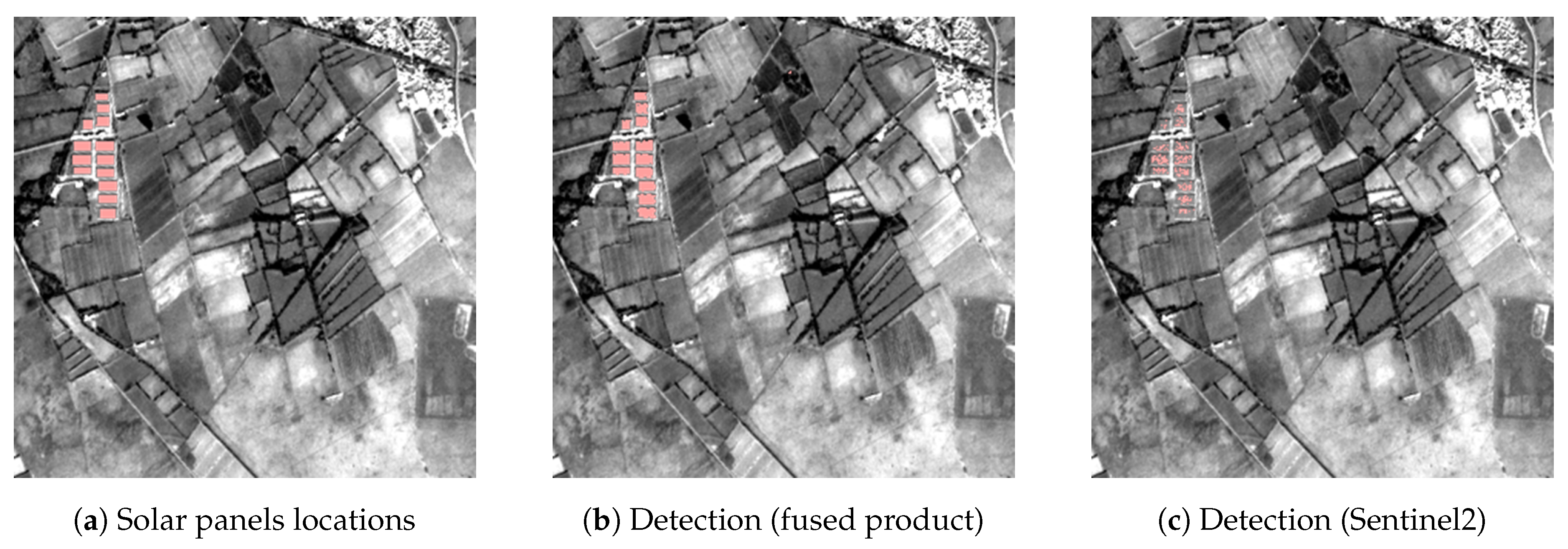
| Product | Overall Accuracy | False Positives |
|---|---|---|
| Multispectral | 34.39 | 0.01 |
| Fused product | 92.68 | 0.10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alonso, K.; Bachmann, M.; Burch, K.; Carmona, E.; Cerra, D.; de los Reyes, R.; Dietrich, D.; Heiden, U.; Hölderlin, A.; Ickes, J.; et al. Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors 2019, 19, 4471. https://doi.org/10.3390/s19204471
Alonso K, Bachmann M, Burch K, Carmona E, Cerra D, de los Reyes R, Dietrich D, Heiden U, Hölderlin A, Ickes J, et al. Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors. 2019; 19(20):4471. https://doi.org/10.3390/s19204471
Chicago/Turabian StyleAlonso, Kevin, Martin Bachmann, Kara Burch, Emiliano Carmona, Daniele Cerra, Raquel de los Reyes, Daniele Dietrich, Uta Heiden, Andreas Hölderlin, Jack Ickes, and et al. 2019. "Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS)" Sensors 19, no. 20: 4471. https://doi.org/10.3390/s19204471
APA StyleAlonso, K., Bachmann, M., Burch, K., Carmona, E., Cerra, D., de los Reyes, R., Dietrich, D., Heiden, U., Hölderlin, A., Ickes, J., Knodt, U., Krutz, D., Lester, H., Müller, R., Pagnutti, M., Reinartz, P., Richter, R., Ryan, R., Sebastian, I., & Tegler, M. (2019). Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors, 19(20), 4471. https://doi.org/10.3390/s19204471