Essentially, fault diagnosis of rotary machinery is a problem of pattern recognition. Besides feature extraction, classification is another important problem. Many common methods in machine learning field are brought into fault diagnosis. Support Vector Machine (SVM) [
21], K-Nearest Neighbor (KNN) [
26], Naive Bayesian [
27], and Fisher Discrimination as well as their variants are widely used, although some other popular methods in recent years are introduced such as deep learning [
28,
29]. In our algorithm, we introduce AdaBoost and design its variants to solve the multiple feature fusion problem.
4.2. Two-Layer AdaBoost
According to Vapnik–Chervonenkis dimension theory (VC dimension theory), the ability of a classification algorithm is related to the dimension of the sample feature and the size of the dataset. As the dimension of features is closer to the number of training samples, the generation ability of the classification algorithm is weaker. VC dimension theory tells us that a high dimension feature or a small dataset is prone to overfitting. In the traditional pattern recognition problem, the dataset usually contains thousands or even millions of samples and overfitting is not considered; hence, the dimension of features can extend to the thousands or larger. However, in rotary machinery, accidents or faults only occur occasionally and it is difficult to obtain a large dataset of fault samples. Most datasets used for research contain fewer than 2000 samples, which forces the algorithms to face the contradiction between a high dimension description and few samples.
Multiple features can be used to describe faults comprehensively, but they inevitably face the high dimension problem. Thus, there is a need to design a fusion algorithm that not only fuses more information from features but also overcomes overfitting.
There exist three main strategies to fuse multiple types of features.
First, combine features directly (CFD) to describe faults. This is a simple strategy; however, it faces overfitting and is only suitable for low dimension features.
Second, adopt dimension reduction to shrink the dimensions of features. This method projects the features into another orthogonal space, and loses the residual which may include redundant descriptive information.
Third, train classifiers separately by different types of features and combine the classifiers according to a series of weights. Many methods have been developed to identify proper weights for this purpose.
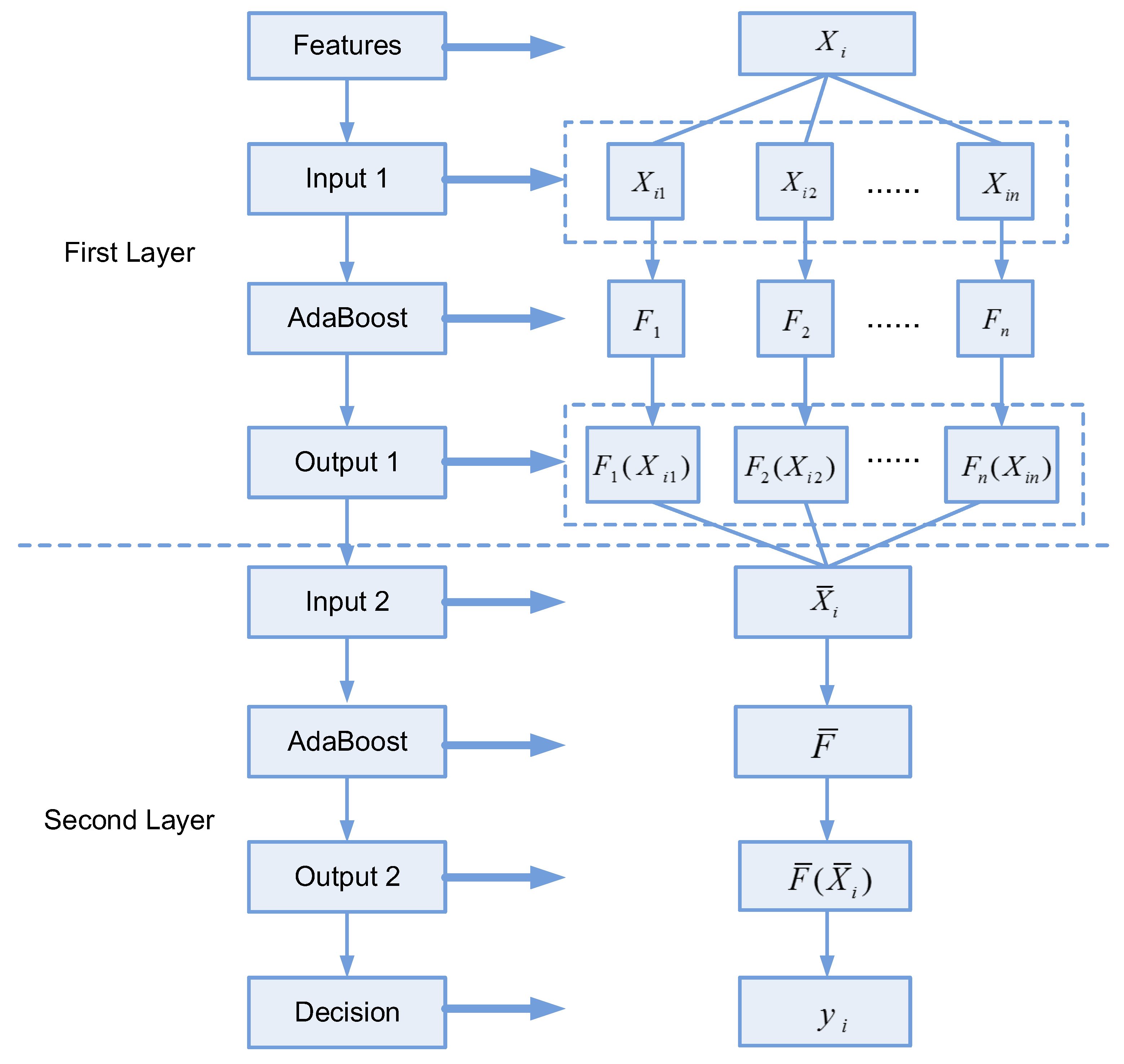
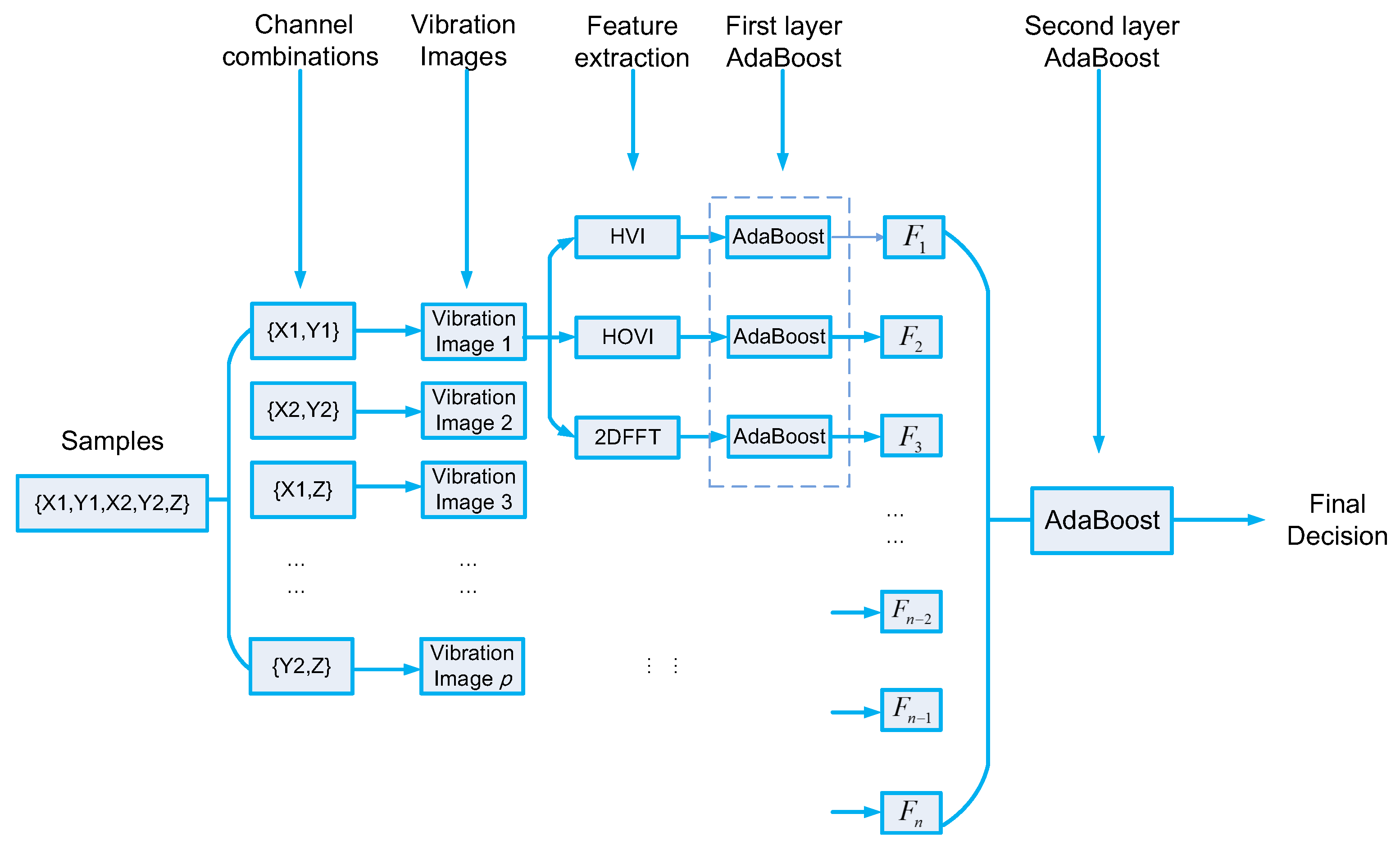
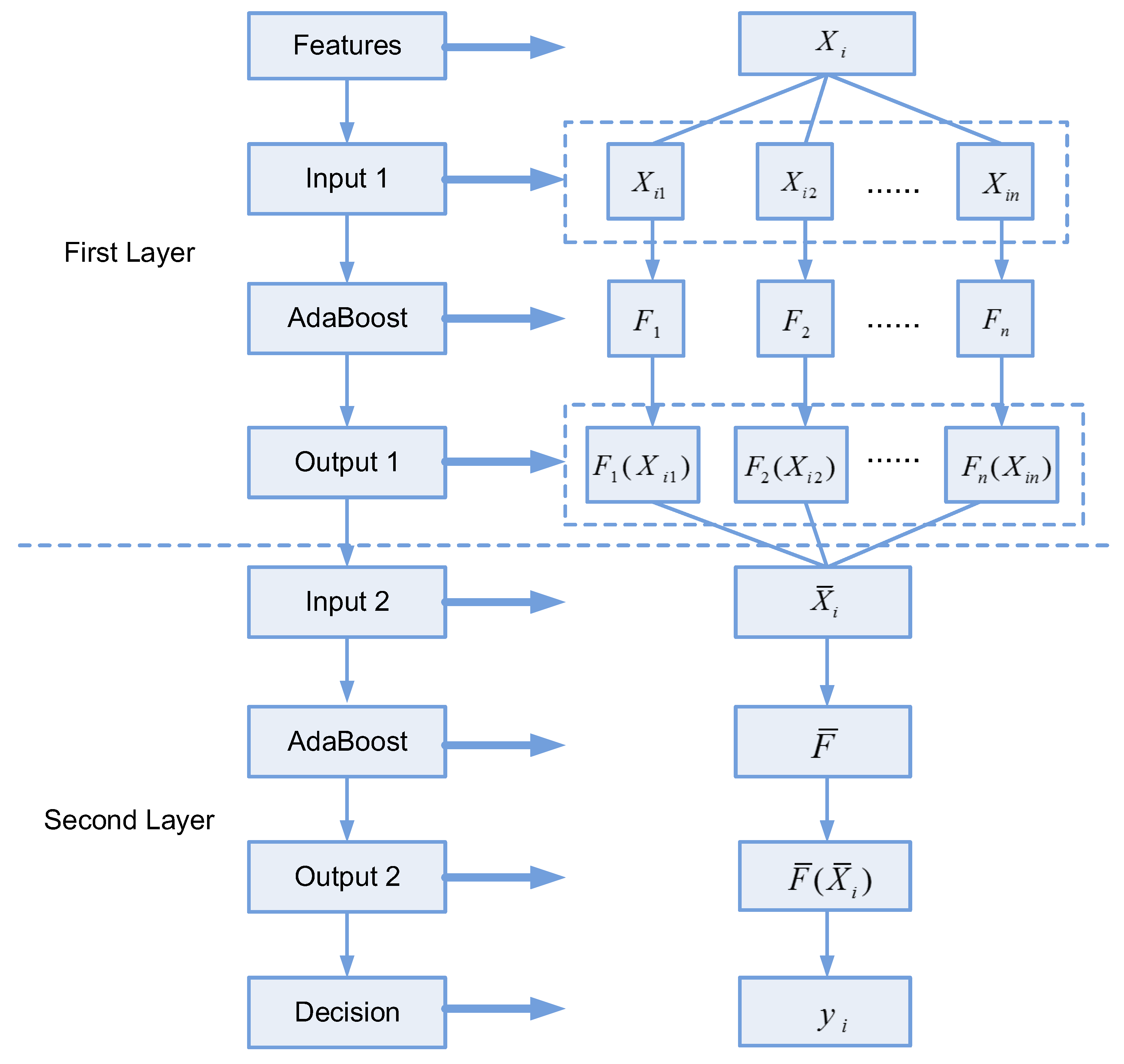
In this paper, our two-layer AdaBoost algorithm is derived from the above strategies and it is designed to avoid overfitting as well as make full use of feature information. The proposal contains two layers of AdaBoost. The feature extracted from one sample is defined as
(see Equation (
10)):
where
denotes the
jth type of feature and is also a vector with dimension
.
n is the number of feature types and
M is total number of samples.
The first layer consists of n AdaBoost classifiers . For , the training set is the jth type of feature . The basic AdaBoost algorithm is used as classifier. The output is an m-dimension vector, each element of which indicates the probability that the sample belongs to the corresponding class. m is the number of fault classes. can be regarded as the dimension reduction result of the primary feature vector , and drops the residual information according to AdaBoost, which ensures that the remaining information is the most discriminative.
As mentioned above, the essence of AdaBoost is to map a high dimension feature vector into an m-element vector with the dimension equal to the number of classes. Each element in the mapped vector corresponds to a class, and the sample belongs to the corresponding class of the largest value in the mapped vector. Hence, the element value in the mapped vector represents the probability that the sample belongs to the corresponding class. When the difference between the element values in the mapped vector is relatively small, that is, the probabilities that the sample belongs to multiple classes are similar, the method of taking the maximum element value as the result can easily cause misidentification. In the conventional methods, when various types of features pass the first layer of AdaBoost, voting or weighting is performed to combine the maximized results of the mapped vectors and much information contained in the mapped vectors is ignored. To discover more useful information, we introduce the second layer of AdaBoost instead of taking a maximum step after the first layer of AdaBoost directly.
In the second layer, all
are concatenated into
(see Equation (
11)):
where
is the input feature vector and the dimension is
. The second layer of the AdaBoost classifier
is trained and the maximum element of the output
corresponds to the class of sample
(see Equation (
12)):
When a new sample comes, it is put into the first layer AdaBoost, and the output is obtained. Then, is input into the second layer AdaBoost to obtain . The recognition result is the class corresponding to maximum element of .
In two-layer AdaBoost, the first layer is a dimension reduction step, which in essence shrinks multiple high dimension features into a short feature vector with the dimension of , and generates a series of AdaBoost classifiers that are trained by different types of features separately. The strategy guarantees the prevention of long feature vectors and avoids overfitting according to VC dimension theory. Compared to traditional dimension reduction methods such as principal component analysis, which only provides results based on linear transformation to remove the residual, the result of the first layer extracts discriminative information and is closer to final classification result. The second layer is the fusion layer, and is combined with the output feature vector from the first layer directly similarly to CFD. AdaBoost itself weights multiple weak learners. Compared to traditional AdaBoost, the input feature of the second layer has lower dimensionality and higher discriminative ability. In summary, two-layer AdaBoost ensembles three main ideas of fusion strategies, and can achieve perfect results. The experiments prove the algorithm to be effective and efficient.
Figure 8 gives an explanation of two-layer AdaBoost in detail.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}