1. Introduction
Active sonar systems detect targets by transmitting specific signals and analyzing echoes from targets. Currently, most anti-submarine active sonars are pulsed active sonars. In order to detect remote targets in noise environments, high-energy pulses are transmitted to gain the required signal-noise ratio. For example, the source level of long-distance pulsed active sonars applied by the United States (U.S.) Navy can be as high as 235 dB [
1]. Higher source levels promote the requirement on transducers, resulting in more difficult manufacturing processes and higher costs. In addition, with such a high source level, a cavitation may be induced close to the transducers in shallow water, which would cause corrosion and changes in radiation impedance [
2]. As a result, long-duration pulse-compression waveforms are employed in pulsed active sonars to deal with these constraints. The pulse-compression property can be achieved by modulations of amplitude, phase, or frequency. The most popular pulse-compression waveform is the linear frequency-modulated (LFM) waveform, which achieves both long pulse duration and wide bandwidth.
Nowadays, the matched filter is utilized in most active sonar systems. It estimates the range and velocity of targets through the correlation between replicas and echoes. If there is no relative motion between the targets and the sonar system, the replicas of the matched filter will have an accurate match with echoes from the target. Once a relative motion emerges, a mismatch will occur due to the Doppler effect, which is referred to as the ‘range-Doppler ambiguity’ problem and frequently occurs in traditional continuous wave (CW) or LFM waveforms of pulse sonar systems. It was indicated that the CW is appropriate for detecting high-speed targets in a reverberation environment, while the LFM is suitable for detecting low-speed or stationary targets [
3]. Hence, it was suggested to combine two different waveforms to improve the detection performance of active sonars. As a result, the continuous transmission of composite pulse trains was developed [
4]. Compared with traditional pulse waveforms, the continuous pulse trains can effectively reduce the range-Doppler ambiguity of detection and result in higher resolutions of range and velocity. Higher transmission and signal-noise ratio gains can also be achieved due to the longer correlation durations. Recently, several modulated pulse train waveforms have been developed. Costas first found that the specific frequency-modulated signals exhibit high range and velocity resolutions, as well as high reverberation suppression performance [
5]. Pechnold proposed using the Costas sequence to improve the performance of pulsed active sonars [
6]. Hickman presented the LFM-Costas pulse train, which was the LFM pulses coded by the Costas sequence [
7]. It was pointed out that this waveform employed the periodic property of the Costas sequence to achieve continuous tracking and high detection resolution. DeFerrari proposed a different approach to design continuous active sonar signals based on the maximal-length sequence [
8]. The results showed that the maximal-length sequence provided the better detecting performance in reverberation and the reduction of the direct blast. Hague researched a generalized sinusoidal frequency-modulated (GSFM) waveform [
9]. This waveform was designed to have low cross-correlations, which can reduce the interference from the direct blast and improve the efficiency of echo signal processing. Liang devised a method of processing multistatic active sonar signals using the improved PeCan phase-modulated waveform as the transmitted signal [
10]. Lourey further studied the hopped frequency-modulated waveform, which exhibited improved range resolution compared to LFM at the cost of a deteriorative interference level [
11]. Wang proposed a method of estimating range and velocity of targets through a continuous transmission of composite hyperbolic frequency-modulated signals [
3]
For an active sonar system, the performance of transmitted signals can be evaluated by the ambiguity function (AF). It depicts the response of a match filter with different time delays and Doppler shifts [
12]. Furthermore, the reverberation suppression performance can be estimated directly from the zero-time-delay cut of AF, which is known as Q-function [
6]. Mathematically, the AF expression is composed of time delays, Doppler shifts, and the characteristic parameters of the waveform, such as bandwidth, carrier frequency, duration, etc. [
5]. Moreover, the AF expression can be visualized as a three-dimensional shape on the time delay-velocity pedestal. The width of the mainlobe and the sidelobe levels are the main characteristics of the AF shape. The width of the mainlobe is inversely proportional to the resolution, distinguishing closely-spaced targets in range or velocity. The sidelobe levels, which represent the sound intensities of sidelobes, can evaluate the ability to detect targets in the reverberation environment. The higher sidelobe levels imply that the target detection is interfered by the reverberation more seriously. In particular, some active sonar waveforms show the AF shape that features a distinct mainlobe at the origin of the time delay–velocity pedestal and sidelobes at the rest of the pedestal evenly, which is known as the ‘thumbtack’ AF shape [
13]. Furthermore, this ideal ‘thumbtack’ AF shape might be reached by optimizing specific parameters in the AF expression. Several methods have been developed for optimizations of polyphase sequences in radar and sonar systems. Liu utilized Tabu search to design orthogonal phase-modulated waveforms for active sonar systems [
14]. Sharma optimized four-phase orthogonal sequences for MIMO radar systems by means of the alternate sequence generation method [
15]. However, frequency-modulated signals have lower degrees of freedom than that of phase-modulated signals. Additionally, the optimization objectives of these two kinds of signals are totally different. Therefore, the aforementioned methods are not appropriate for the research on frequency-modulated waveforms. Zhao proposed another approach for the optimal sidelobe design of the hopped-frequency waveform with the adaptive gradient search [
16]. Moreover, Mehany and Wang both used the genetic algorithm (GA) to optimize orthogonal waveforms for radar systems [
17,
18].
This paper focuses on the optimal waveform design of several frequency-modulated pulse trains with GA. The first waveform to be optimized is the LFM-Costas pulse train. Through the modulation of Costas sequence, the range-Doppler ambiguity problem of LFM is alleviated, but the Doppler ambiguity problem still exists, which is what we are concerned about in this paper. The second pulse train is the generalized sinusoidal frequency-modulated (GSFM) waveform, which features the thumbtack AF mainlobe. However, there are still relatively high sidelobe levels in the AF under present parameter settings [
9]. Thus, the optimal waveform design of the GSFM pulse train needs to be further researched.
The rest of this paper is organized as follows.
Section 2 describes the quantitative AF expressions of continuous pulse trains, which are essential for our research. The optimization model of frequency-modulated pulse trains is given in
Section 3, and the optimized objectives include AF shape and the zero-velocity cut of AF. In addition, the correlations between the sub-pulses of the GSFM pulse train are also the optimized objective. Evaluation criteria for optimizing the frequency-modulated pulse trains are then formulated, which can be minimized using GA. The experimental simulations and analysis are provided in
Section 4, and the optimal parameters of the LFM-Costas and GSFM pulse trains are obtained. The AF properties of two optimized pulse trains are analyzed, and their reverberation suppression performance is also discussed by means of Q-function. Finally,
Section 5 presents the conclusions of this paper.
2. AF Quantitative Expression of Frequency-Modulated Pulse Train
The AF properties of the pulse train are demonstrated by its AF shape, which is related to the AF quantitative expression. Due to the indeterminacy of the quantitative expressions, the AF shape is alterable so that some specific AF properties can be obtained. Then, it is possible to improve both the AF shape and the properties of a specific pulse train through the modulation of its AF expression. In this paper, an optimization model is formed to improve the required AF properties. The model is primarily regulated by the AF quantitative expression. For this reason, it is necessary to derive the quantitative expressions before we construct the model. The AF expressions of the basic Costas sequence, LFM pulse, and LFM-Costas pulse train have been outlined by [
5] and [
19], respectively, while the expression of the GSFM pulse train remains to be derived. Hence, we present an AF expression adaptable to all kinds of frequency-modulated pulse trains involving the LFM-Costas and GSFM, which are optimized in the next section.
A continuous pulse train consisting of
pulses can be expressed as follows:
where
is the duration of sub-pulses, and
represents the
nth sub-pulse of the train, which can be written as:
where
is the rectangular function,
is the hopped frequency of the
nth sub-pulse, and
is the complex envelope of
. Assuming that the target velocity is much lower than the sound speed and the ratio of bandwidth with carrier frequency
is low (
), which means that the pulse train can be simplified in the form of narrowband, then the narrowband cross-ambiguity function (NCAF) of different sub-pulses
and
can be expressed as [
20]:
where
is the time delay and
is the Doppler shift of echoes.
is defined as the AF of the complex envelopes
. The narrowband auto-ambiguity function (NAAF)
can be expressed by replacing the subscript
with
in Equation (3). According to [
5], the AF expression of continuous pulse train can be written as:
then, substituting
and
into Equation (4), the AF expression of the frequency-modulated pulse train can be rewritten as:
According to Equation (5), the AF quantitative expressions of all kinds of frequency-modulated pulse trains are represented by the AF expressions of the complex envelopes
with different time delays and frequency shifts. As aforementioned, some AF expressions of pulses’ complex envelopes have been given out. In particular, the
nth sub-pulse of the LFM-Costas pulse train can be written as:
which has the carrier frequency
and the linear modulation index
.
(
is the Costas sequence and
is the frequency separation. Here, the complex envelope
is defined as
. According to the conclusion in [
19], the AF expression of the complex envelopes
has been derived as:
Therefore, substituting
back into Equation (5), we can obtain the AF expression of LFM-Costas.
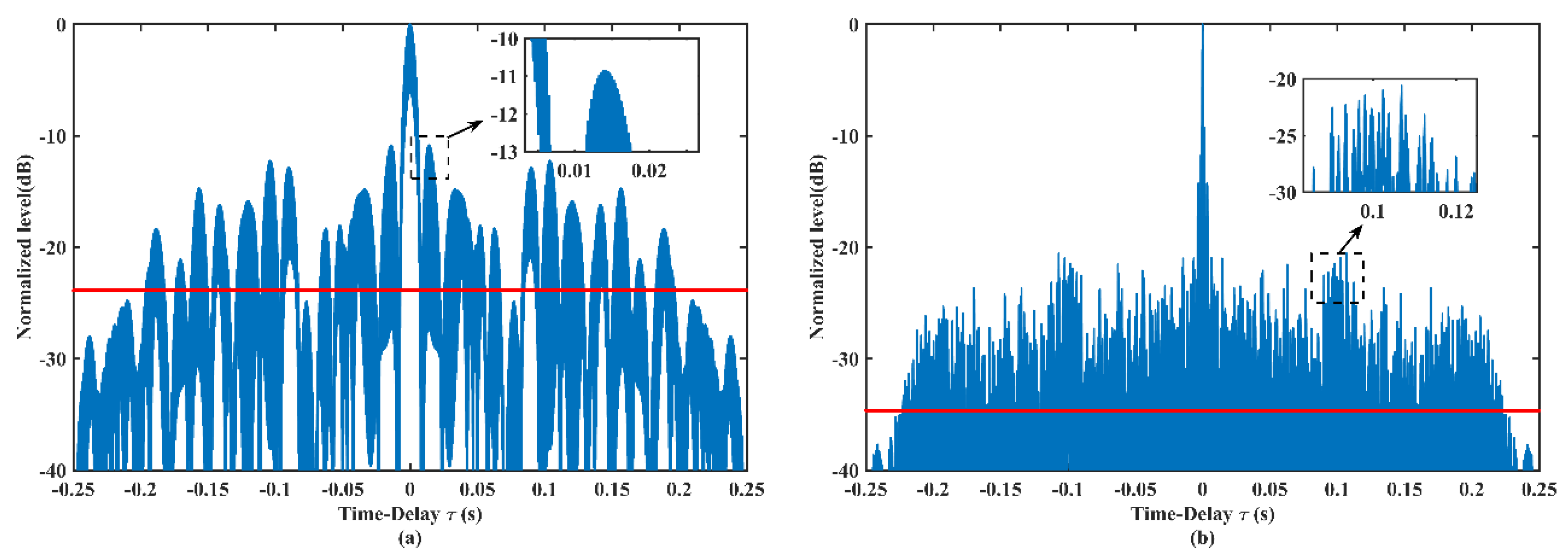
Figure 1a,b shows the AF shapes of the LFM and LFM-Costas pulse trains, respectively. In
Figure 1a, the LFM pulse train exhibits severe Doppler ambiguity and periodic repetitions of sidelobes.
Figure 1b demonstrates that the Doppler ambiguity problem of the LFM pulse train has been significantly improved. However, ambiguity along the velocity dimension still exists in LFM-Costas.
Analogously, the closed-form AF of the GSFM pulse train can be achieved as the above derivation of LFM-Costas. The expression of the GSFM sub-pulse can be written as:
where
is the modulation index,
is the modulation frequency, and
is the bandwidth.
is a unitless parameter that must be greater than or equal to 1, while
is a frequency modulation term with units
[
9]. This paper focus on the GSFM pulse with even-symmetric instantaneous-frequency, which replaces
in Equation (8) with
. This kind of GSFM pulse has the same performance as the normal kind of Equation (8) and can simplify the mathematical processing. According to the research in [
20], the AF expression of an even-symmetric GSFM pulse can be expressed as:
where
are the Fourier coefficients of instantaneous frequency
, and
is the infinite-dimension generalized Bessel function (GBF) of the modified form [
21].
Substituting Equation (9) into the expressions of NAAF
and NCAF
, then according to Equation (5), the AF expression of GSFM pulse train can be expressed as the following:
The quantitative AF expression of the GSFM pulse train is derived through Equation (10).
Figure 2 shows the AF shape of the GSFM single pulse and the corresponding pulse train with size
. It is worth noting that the
of GSFM is different from LFM and LFM-Costas (
). The reason is that the longer-duration GSFM pulse (
) yields the worst AF performance. Our previous research in [
22] shows that the GSFM pulse with
have the best AF and correlation properties. Compared with
Figure 1, the AF shape of GSFM pulse in
Figure 2a clearly shows the thumbtack mainlobe and there is almost no evidence of a range-Doppler ambiguity problem. However, the sidelobe levels of the single pulse are still high. The AF shape in
Figure 2b features a narrower mainlobe and lower sidelobes than
Figure 2a in both time delay and velocity. This demonstrates that the increasing duration caused by continuous transmission of pulses can sharpen the mainlobe and reduce the sidelobe levels in AF, which improves the target detection in a reverberation environment. However, some sidelobes still exist, especially along the velocity
.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}