Radial Basis Functions Intended to Determine the Upper Bound of Absolute Dynamic Error at the Output of Voltage-Mode Accelerometers



Abstract
:1. Introduction
2. General Guidelines for the Proposed Procedure
3. Mathematical Models of the Voltage-Mode Accelerometer and the Standard
4. Algorithm for Determining the UAE
5. Procedure for Determining the RBF Based on the RBF-NN
- The RBF centers were randomly sampled among the domain of the input dataset.
- The value of parameter was selected from the set range with a given step.
- For every value of parameter the appropriate weights were calculated using a pseudoinverse solution.
- The determination coefficient and the mean squared error (MSE) were calculated.
- Steps 2–4 were repeated for all indicated ranges to find the hyperparameters which optimize the value of the coefficient
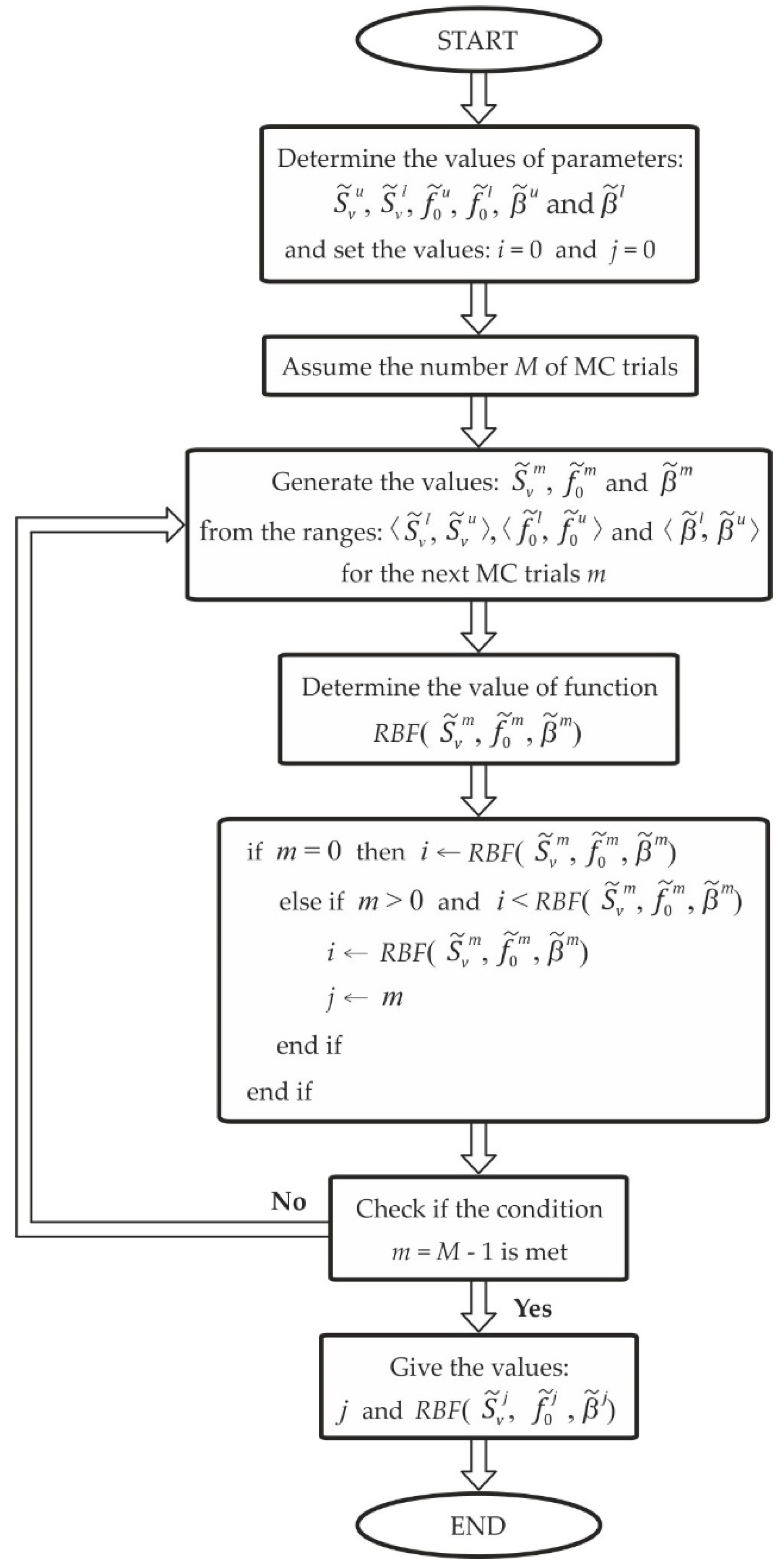
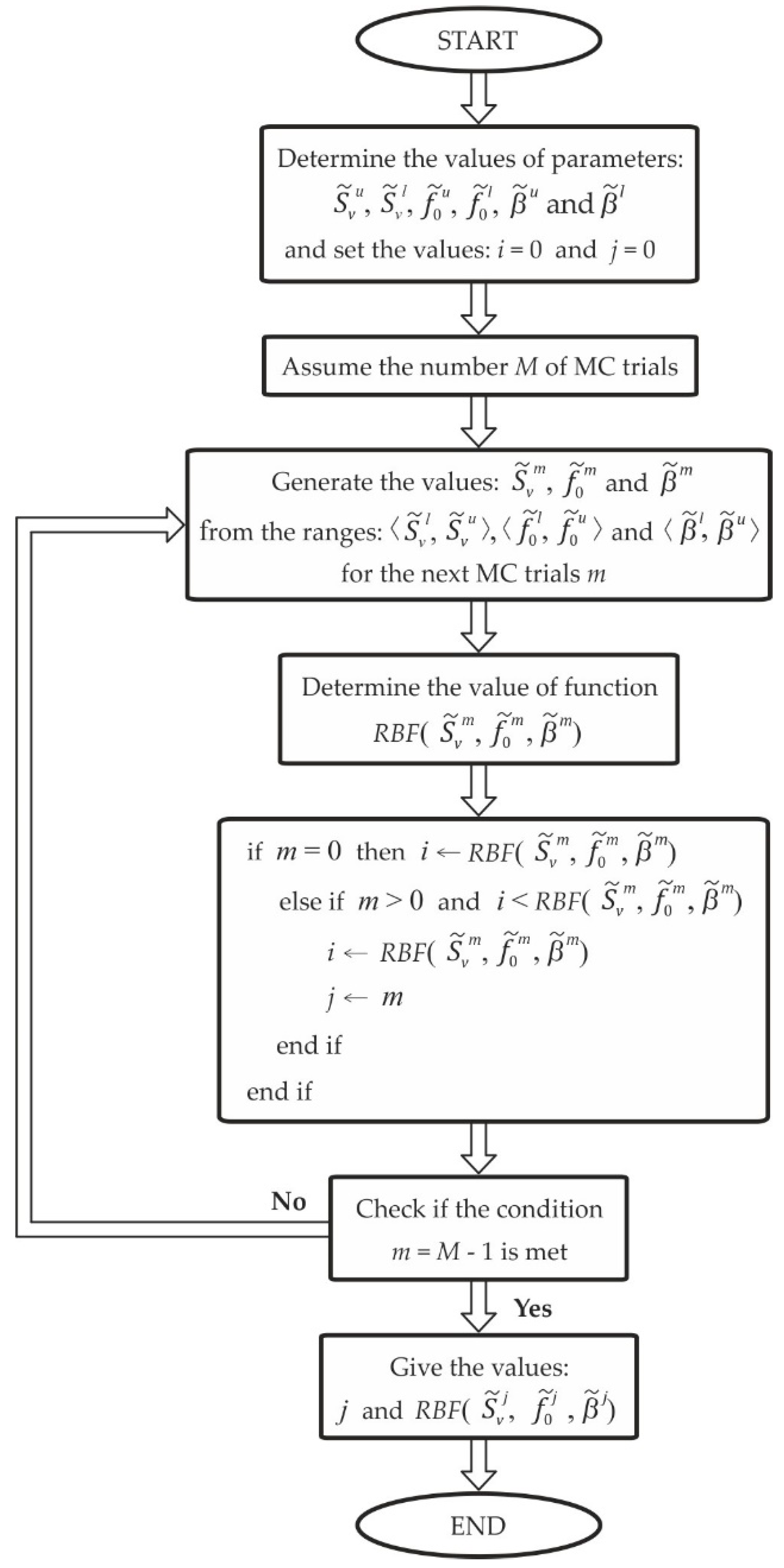
6. MC-Based Procedure for Determining the UAERBF(max)
7. Results and Verification
- For five radial neurons:
- For 10 radial neurons:
- For 15 radial neurons:
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ghemari, Z.; Salah, S.; Abdelwaheb, A.; Lakehal, A. New Model of Piezoelectric Accelerometer Relative Movement Modulus. Trans. Inst. Meas. Control 2014, 58, 707–712. [Google Scholar]
- Sun, X.T.; Jing, X.J.; Xu, J.; Cheng, L. A Quasi-Zero-Stiffness-Based Sensor System in Vibration Measurement. IEEE Trans. Ind. Electron. 2014, 61, 5606–6114. [Google Scholar]
- Sharapov, V. Piezoceramic Sensors; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- BIPM; IEC; IFCC; ILAC; ISO; IUPAC; IUPAP; OIML. International Vocabulary of Metrology—Basic and General Concepts and Associated Terms (VIM), 3rd ed. Available online: https://www.bipm.org/utils/common/documents/jcgm/JCGM_200_2012.pdf (accessed on 24 September 2019).
- Prajapati, H.; Deshmukh, N.N. Design and development of thin wire sensor for transient temperature measurement. Measurement 2019, 140, 582–589. [Google Scholar]
- Sabuga, W.; Rabault, T.; Wüthrich, C.; Pražák, D.; Chytil, M.; Brouwer, L.; Ahmed, A.D.S. High pressure metrology for industrial applications. Metrologia 2017, 54, 27–44. [Google Scholar]
- Wilczynska, T.; Wisniewski, R.; Konarski, P. Temperature and pressure properties of the resistance alloy ZERANIN30 implanted by high dose, middle energy, C+ ions. Prz. Elektrotech. 2012, 88, 292–295. [Google Scholar]
- Sulowicz, M.; Ludwinek, K.; Tulicki, J.; Depczynski, W.; Nowakowski, L. Practical adaptation of a low-cost voltage transducer with an open feedback loop for precise measurement of distorted voltages. Sensors 2019, 19, 1071. [Google Scholar] [CrossRef]
- Layer, E. Theoretical Principles for Establishing a Hierarchy of Dynamic Accuracy with the Integral-Square-Error as an Example. IEEE Trans. Instrum. Meas. 1997, 46, 1178–1182. [Google Scholar]
- Omer, A.I.; Taleb, M.M. Measurement Systems: Characteristics and Models. Eur. Sci. J. 2014, 10, 248–260. [Google Scholar]
- BIPM; IEC; IFCC; ILAC; ISO; IUPAC; IUPAP; OIML. Supplement 2 to the Guide to the Expression of Uncertainty in Measurement—Extension to any Number of Output Quantities. Available online: https://www.bipm.org/utils/common/documents/jcgm/JCGM_102_2011_E.pdf (accessed on 24 September 2019).
- Layer, E.; Gawedzki, W. Theoretical principles for dynamic errors measurement. Measurement 1990, 8, 45–48. [Google Scholar]
- Shestakov, A.L. Dynamic measuring methods: A review. Acta IMEKO 2019, 8, 64–76. [Google Scholar]
- Hessling, J.P. A novel method of estimating dynamic measurement errors. Meas. Sci. Technol. 2006, 17, 173–182. [Google Scholar]
- Dichev, D.; Koev, H.; Bakalova, T.; Louda, P. A Model of the Dynamic Error as a Measurement Result of Instruments Defining the Parameters of Moving Objects. Meas. Sci. Rev. 2014, 14, 183–189. [Google Scholar] [Green Version]
- Honig, M.L.; Steiglitz, K. Maximizing the output energy of a linear channel with a time and amplitude limited input. IEEE Trans. Inf. Theory 1992, 38, 1041–1052. [Google Scholar]
- Tomczyk, K.; Layer, E. Accelerometer errors in measurements of dynamic signals. Measurement 2015, 60, 292–298. [Google Scholar]
- Tomczyk, K. Polynomial approximation of the maximum dynamic error generated by measurement systems. Prz. Elektrotech. 2019, 95, 124–127. [Google Scholar]
- Tomczyk, K. New algorithm for determining the dynamic error for the integral-square criterion. J. Phys. Conf. Ser. 2018, 1065, 1–4. [Google Scholar]
- Rutland, N.K. The principle of matching: Practical conditions for systems with inputs restricted in magnitude and rate of change. IEEE Trans. Automat. Control 1994, 39, 550–553. [Google Scholar]
- Tomczyk, K. Levenberg-Marquardt Algorithm for Optimization of Mathematical Models according to Minimax Objective Function of Measurement Systems. Metrol. Meas. Syst. 2009, 16, 599–606. [Google Scholar]
- Curve Fitting Toolbox. Available online: http://cda.psych.uiuc.edu/matlab_pdf/curvefit.pdf (accessed on 26 August 2019).
- Sinha, P. Multivariate Polynomial Regression in Data Mining: Methodology, Problems and Solutions. J. Sci. Eng. Res. 2013, 4, 962–965. [Google Scholar]
- Rady El-Housseiny, A.; Ziedan, D. Estimation of Population Total Using Local Polynomial Regression with Two Auxiliary Variables. J. Stat. Appl. Probab. 2014, 2, 129–136. [Google Scholar]
- Neural Network Toolbox. Available online: http://cda.psych.uiuc.edu/matlab_pdf/nnet.pdf (accessed on 26 August 2019).
- Dudzik, M.; Tomczyk, K.; Jagiello, A.S. Analysis of the error generated by the voltage output accelerometer using the optimal structure of an artificial neural network. In Proceedings of the 2018 19th International Conference on Research and Education in Mechatronics (REM 2018), Delft, The Netherlands, 7–8 June 2018; pp. 7–11. [Google Scholar]
- Dudzik, M.; Tomczyk, K.; Sieja, M. Optimal dynamic error formula for charge output accelerometer obtained by the neural network. In Proceedings of the International Symposium on Electrical Machines (SME 2018), Andrychow, Poland, 10–13 June 2018; pp. 1–4. [Google Scholar]
- Park, J.; Sandberg, I.W. Universal Approximation Using Radial-Basis-Function Networks. Neural Comput. 1991, 3, 246–257. [Google Scholar] [PubMed]
- Buljak, V.; Maier, G. Proper orthogonal decomposition and radial basis functions in material characterization based on instrumented indentation. Eng. Struct. 2011, 33, 492–501. [Google Scholar]
- Buljak, V. Proper orthogonal decomposition and radial basis functions algorithm for diagnostic procedure based on inverse analysis. FME Trans. 2010, 38, 129–136. [Google Scholar]
- Benaissa, B.; Köppen, M.; Wahab, M.A.; Khatir, S. Application of proper orthogonal decomposition and radial basis functions for crack size estimation using particle swarm optimization. J. Phys. Conf. Ser. 2017, 842, 1–11. [Google Scholar]
- Xiao, D.; Fang, F.; Pain, C.C.; Navon, I.M.; Salinas, P.; Muggeridge, A. Non-intrusive reduced order modeling of multi-phase flow in porous media using the POD-RBF method. J. Comput. Phys. 2015, 1, 1–25. [Google Scholar]
- Link, A.; Täbner, A.; Wabinski, W.; Bruns, T.; Elster, C. Modelling accelerometers for transient signals using calibration measurement upon sinusoidal excitation. Measurement 2007, 40, 928–935. [Google Scholar]
- BIPM; IEC; IFCC; ILAC; ISO; IUPAC; IUPAP; OIML. Evaluation of Measurement Data—Supplement 1 to the Guide to the Expression of Uncertainty in Measurement—Propagation of Distributions Using a Monte Carlo Method. Available online: https://www.bipm.org/utils/common/documents/jcgm/JCGM_101_2008_E.pdf (accessed on 24 September 2019).
- Guimarães Couto, P.R.; Carreteiro Damasceno, J.; de Oliveira, S.P. Monte Carlo Simulations Applied to Uncertainty in Measurement; IntechOpen: London, UK, 2013; pp. 27–51. [Google Scholar]
- Harris, P.M.; Cox, M.G. On a Monte Carlo method for measurement uncertainty evaluation and its implementation. Metrologia 2014, 51, 176–182. [Google Scholar]
- Wichmann, B.A.; Hill, I.D. Generating Good Pseudo-Random Numbers. Comput. Stat. Data Anal. 2006, 51, 1614–1622. [Google Scholar]
- Strang, G. Linear Algebra and its Applications, 2nd ed.; Academic Press Inc.: Orlando, FL, USA, 1980; pp. 139–142. [Google Scholar]
- Python Software Foundation. Python Language Reference, Version 3.6. Available online: http://www.python.org (accessed on 26 August 2019).
- Hunter, J.D. Matplotlib: A 2D Graphics Environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Van der Walt, S.; Colbert, S.C.; Varoquaux, G. The NumPy Array: A Structure for Efficient Numerical Computation. Comput. Sci. Eng. 2011, 13, 22–30. [Google Scholar] [Green Version]
- McKinney, W. Data Structures for Statistical Computing in Python. In Proceedings of the 9th Python in Science Conference, Austin, TX, USA, 28 June–3 July 2010; Volume 445, pp. 51–56. [Google Scholar]
- Pérez, F.; Granger, B.E. IPython: A System for Interactive Scientific Computing. Comput. Sci. Eng. 2007, 9, 21–29. [Google Scholar]
- Jones, E.; Oliphant, E.; Peterson, P. SciPy: Open Source Scientific Tools for Python 2001. Available online: http://www.scipy.org (accessed on 26 August 2019).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.0100 | 0.0102 | 0.0104 | 0.0106 | 0.0108 | 0.0110 | 0.0112 | 0.0114 | 0.0116 | 0.0118 | 0.0120 | 0.0122 | 0.0124 | ||
| 0.100 | 0.634 | 0.621 | 0.610 | 0.598 | 0.587 | 0.576 | 0.566 | 0.556 | 0.547 | 0.537 | 0.528 | 0.520 | 0.511 | |
| 0.102 | 0.660 | 0.647 | 0.634 | 0.622 | 0.611 | 0.600 | 0.589 | 0.579 | 0.569 | 0.559 | 0.550 | 0.541 | 0.532 | |
| 0.104 | 0.686 | 0.672 | 0.659 | 0.647 | 0.635 | 0.623 | 0.612 | 0.602 | 0.591 | 0.581 | 0.571 | 0.562 | 0.553 | |
| 0.106 | 0.712 | 0.698 | 0.685 | 0.672 | 0.659 | 0.648 | 0.636 | 0.625 | 0.614 | 0.604 | 0.594 | 0.584 | 0.575 | |
| 0.108 | 0.739 | 0.725 | 0.711 | 0.698 | 0.685 | 0.672 | 0.660 | 0.649 | 0.638 | 0.627 | 0.616 | 0.606 | 0.596 | |
| 0.110 | 0.767 | 0.752 | 0.738 | 0.724 | 0.710 | 0.697 | 0.685 | 0.673 | 0.661 | 0.650 | 0.639 | 0.629 | 0.619 | |
| 0.112 | 0.795 | 0.780 | 0.765 | 0.750 | 0.736 | 0.723 | 0.710 | 0.698 | 0.686 | 0.674 | 0.663 | 0.652 | 0.641 | |
| 0.114 | 0.824 | 0.808 | 0.792 | 0.777 | 0.763 | 0.749 | 0.736 | 0.723 | 0.710 | 0.698 | 0.687 | 0.675 | 0.664 | |
| 0.116 | 0.853 | 0.836 | 0.820 | 0.805 | 0.790 | 0.776 | 0.762 | 0.748 | 0.735 | 0.723 | 0.711 | 0.699 | 0.688 | |
| 0.118 | 0.883 | 0.865 | 0.849 | 0.833 | 0.817 | 0.803 | 0.788 | 0.774 | 0.761 | 0.748 | 0.736 | 0.724 | 0.712 | |
| 0.120 | 0.913 | 0.895 | 0.878 | 0.861 | 0.845 | 0.830 | 0.815 | 0.801 | 0.787 | 0.774 | 0.761 | 0.748 | 0.736 | |
| 0.122 | 0.943 | 0.925 | 0.907 | 0.890 | 0.874 | 0.858 | 0.843 | 0.828 | 0.813 | 0.800 | 0.786 | 0.773 | 0.761 | |
| 0.124 | 0.975 | 0.956 | 0.937 | 0.920 | 0.902 | 0.886 | 0.870 | 0.855 | 0.840 | 0.826 | 0.812 | 0.799 | 0.786 | |
| 0.126 | 1.006 | 0.987 | 0.968 | 0.950 | 0.932 | 0.915 | 0.899 | 0.883 | 0.868 | 0.853 | 0.839 | 0.825 | 0.812 | |
| 0.128 | 1.039 | 1.018 | 0.999 | 0.980 | 0.962 | 0.944 | 0.927 | 0.911 | 0.895 | 0.880 | 0.866 | 0.851 | 0.838 | |
| 0.130 | 1.071 | 1.050 | 1.030 | 1.011 | 0.992 | 0.974 | 0.957 | 0.940 | 0.924 | 0.908 | 0.893 | 0.878 | 0.864 | |
| 0.132 | 1.104 | 1.083 | 1.062 | 1.042 | 1.023 | 1.004 | 0.986 | 0.969 | 0.952 | 0.936 | 0.921 | 0.905 | 0.891 | |
| 0.134 | 1.138 | 1.116 | 1.095 | 1.074 | 1.054 | 1.035 | 1.016 | 0.999 | 0.981 | 0.965 | 0.949 | 0.933 | 0.918 | |
| 0.136 | 1.172 | 1.149 | 1.128 | 1.106 | 1.086 | 1.066 | 1.047 | 1.029 | 1.011 | 0.994 | 0.977 | 0.961 | 0.946 | |
| 0.138 | 1.207 | 1.183 | 1.161 | 1.139 | 1.118 | 1.098 | 1.078 | 1.059 | 1.041 | 1.023 | 1.006 | 0.990 | 0.974 | |
| 0.140 | 1.242 | 1.218 | 1.195 | 1.172 | 1.150 | 1.130 | 1.109 | 1.090 | 1.071 | 1.053 | 1.036 | 1.019 | 1.002 | |
| 0.142 | 1.278 | 1.253 | 1.229 | 1.206 | 1.183 | 1.162 | 1.141 | 1.121 | 1.102 | 1.083 | 1.065 | 1.048 | 1.031 | |
| 0.144 | 1.314 | 1.289 | 1.264 | 1.240 | 1.217 | 1.195 | 1.174 | 1.153 | 1.133 | 1.114 | 1.096 | 1.078 | 1.060 | |
| 0.146 | 1.351 | 1.325 | 1.300 | 1.275 | 1.251 | 1.229 | 1.207 | 1.185 | 1.165 | 1.145 | 1.126 | 1.108 | 1.090 | |
| 0.148 | 1.388 | 1.361 | 1.335 | 1.310 | 1.286 | 1.262 | 1.240 | 1.218 | 1.197 | 1.177 | 1.157 | 1.138 | 1.120 | |
| 0.150 | 1.426 | 1.398 | 1.372 | 1.346 | 1.321 | 1.297 | 1.274 | 1.251 | 1.230 | 1.209 | 1.189 | 1.169 | 1.150 | |
| 0.0126 | 0.0128 | 0.0130 | 0.0132 | 0.0134 | 0.0136 | 0.0138 | 0.0140 | 0.0142 | 0.0144 | 0.0146 | 0.0148 | 0.0150 | ||
| 0.100 | 0.503 | 0.495 | 0.488 | 0.480 | 0.473 | 0.466 | 0.459 | 0.453 | 0.447 | 0.440 | 0.434 | 0.428 | 0.423 | |
| 0.102 | 0.524 | 0.515 | 0.507 | 0.500 | 0.492 | 0.485 | 0.478 | 0.471 | 0.465 | 0.458 | 0.452 | 0.446 | 0.440 | |
| 0.104 | 0.544 | 0.536 | 0.528 | 0.520 | 0.512 | 0.504 | 0.497 | 0.490 | 0.483 | 0.476 | 0.470 | 0.463 | 0.457 | |
| 0.106 | 0.565 | 0.557 | 0.548 | 0.540 | 0.532 | 0.524 | 0.516 | 0.509 | 0.502 | 0.495 | 0.488 | 0.481 | 0.475 | |
| 0.108 | 0.587 | 0.578 | 0.569 | 0.560 | 0.552 | 0.544 | 0.536 | 0.528 | 0.521 | 0.514 | 0.507 | 0.500 | 0.493 | |
| 0.110 | 0.609 | 0.599 | 0.590 | 0.581 | 0.573 | 0.564 | 0.556 | 0.548 | 0.540 | 0.533 | 0.526 | 0.518 | 0.512 | |
| 0.112 | 0.631 | 0.621 | 0.612 | 0.603 | 0.594 | 0.585 | 0.576 | 0.568 | 0.560 | 0.552 | 0.545 | 0.537 | 0.530 | |
| 0.114 | 0.654 | 0.644 | 0.634 | 0.624 | 0.615 | 0.606 | 0.597 | 0.589 | 0.580 | 0.572 | 0.564 | 0.557 | 0.549 | |
| 0.116 | 0.677 | 0.667 | 0.656 | 0.646 | 0.637 | 0.627 | 0.618 | 0.609 | 0.601 | 0.593 | 0.584 | 0.577 | 0.569 | |
| 0.118 | 0.701 | 0.690 | 0.679 | 0.669 | 0.659 | 0.649 | 0.640 | 0.631 | 0.622 | 0.613 | 0.605 | 0.597 | 0.589 | |
| 0.120 | 0.725 | 0.713 | 0.702 | 0.692 | 0.681 | 0.671 | 0.662 | 0.652 | 0.643 | 0.634 | 0.625 | 0.617 | 0.609 | |
| 0.122 | 0.749 | 0.737 | 0.726 | 0.715 | 0.704 | 0.694 | 0.684 | 0.674 | 0.665 | 0.655 | 0.646 | 0.638 | 0.629 | |
| 0.124 | 0.774 | 0.762 | 0.750 | 0.739 | 0.728 | 0.717 | 0.706 | 0.696 | 0.687 | 0.677 | 0.668 | 0.659 | 0.650 | |
| 0.126 | 0.799 | 0.786 | 0.774 | 0.763 | 0.751 | 0.740 | 0.729 | 0.719 | 0.709 | 0.699 | 0.690 | 0.680 | 0.671 | |
| 0.128 | 0.824 | 0.812 | 0.799 | 0.787 | 0.775 | 0.764 | 0.753 | 0.742 | 0.732 | 0.722 | 0.712 | 0.702 | 0.693 | |
| 0.130 | 0.850 | 0.837 | 0.824 | 0.812 | 0.800 | 0.788 | 0.776 | 0.765 | 0.755 | 0.744 | 0.734 | 0.724 | 0.714 | |
| 0.132 | 0.877 | 0.863 | 0.850 | 0.837 | 0.824 | 0.812 | 0.801 | 0.789 | 0.778 | 0.767 | 0.757 | 0.747 | 0.737 | |
| 0.134 | 0.904 | 0.889 | 0.876 | 0.862 | 0.850 | 0.837 | 0.825 | 0.813 | 0.802 | 0.791 | 0.780 | 0.769 | 0.759 | |
| 0.136 | 0.931 | 0.916 | 0.902 | 0.888 | 0.875 | 0.862 | 0.850 | 0.838 | 0.826 | 0.815 | 0.803 | 0.793 | 0.782 | |
| 0.138 | 0.958 | 0.943 | 0.929 | 0.915 | 0.901 | 0.888 | 0.875 | 0.862 | 0.850 | 0.839 | 0.827 | 0.816 | 0.805 | |
| 0.140 | 0.986 | 0.971 | 0.956 | 0.941 | 0.927 | 0.914 | 0.901 | 0.888 | 0.875 | 0.863 | 0.851 | 0.840 | 0.829 | |
| 0.142 | 1.015 | 0.999 | 0.983 | 0.969 | 0.954 | 0.940 | 0.926 | 0.913 | 0.900 | 0.888 | 0.876 | 0.864 | 0.852 | |
| 0.144 | 1.043 | 1.027 | 1.011 | 0.996 | 0.981 | 0.967 | 0.953 | 0.939 | 0.926 | 0.913 | 0.901 | 0.888 | 0.877 | |
| 0.146 | 1.073 | 1.056 | 1.040 | 1.024 | 1.009 | 0.994 | 0.979 | 0.965 | 0.952 | 0.939 | 0.926 | 0.913 | 0.901 | |
| 0.148 | 1.102 | 1.085 | 1.068 | 1.052 | 1.036 | 1.021 | 1.006 | 0.992 | 0.978 | 0.965 | 0.951 | 0.939 | 0.926 | |
| 0.150 | 1.132 | 1.114 | 1.097 | 1.081 | 1.065 | 1.049 | 1.034 | 1.019 | 1.005 | 0.991 | 0.977 | 0.964 | 0.951 | |
| Number of Neurons | Max Error (%) | MSE | MAE | MedAE | R2 |
|---|---|---|---|---|---|
| 5 | 2.680 | 1.27 × 10−4 | 0.00940 | 0.00860 | 0.997300 |
| 10 | 0.310 | 1.39 × 10−6 | 0.00098 | 0.00093 | 0.999970 |
| 15 | 0.098 | 9.94 × 10−8 | 0.00024 | 0.00017 | 0.999998 |
| 0.0101 | 0.0117 | 0.0133 | 0.0149 | ||
|---|---|---|---|---|---|
| 0.101 | 0.641 | 0.552 | 0.487 | 0.434 | |
| 0.117 | 0.859 | 0.742 | 0.653 | 0.582 | |
| 0.133 | 1.11 | 0.959 | 0.843 | 0.753 | |
| 0.149 | 1.392 | 1.204 | 1.058 | 0.945 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomczyk, K.; Piekarczyk, M.; Sokal, G. Radial Basis Functions Intended to Determine the Upper Bound of Absolute Dynamic Error at the Output of Voltage-Mode Accelerometers. Sensors 2019, 19, 4154. https://doi.org/10.3390/s19194154
Tomczyk K, Piekarczyk M, Sokal G. Radial Basis Functions Intended to Determine the Upper Bound of Absolute Dynamic Error at the Output of Voltage-Mode Accelerometers. Sensors. 2019; 19(19):4154. https://doi.org/10.3390/s19194154
Chicago/Turabian StyleTomczyk, Krzysztof, Marcin Piekarczyk, and Grzegorz Sokal. 2019. "Radial Basis Functions Intended to Determine the Upper Bound of Absolute Dynamic Error at the Output of Voltage-Mode Accelerometers" Sensors 19, no. 19: 4154. https://doi.org/10.3390/s19194154