An Adaptation Multi-Group Quasi-Affine Transformation Evolutionary Algorithm for Global Optimization and Its Application in Node Localization in Wireless Sensor Networks




Abstract
:1. Introduction
- A proposed novel AMG-QUATRE algorithm overcomes the deficiencies of the original QUATRE.
- Full use of different mutation strategies along with proper parameters makes a better trade-off between exploration and exploitation capability.
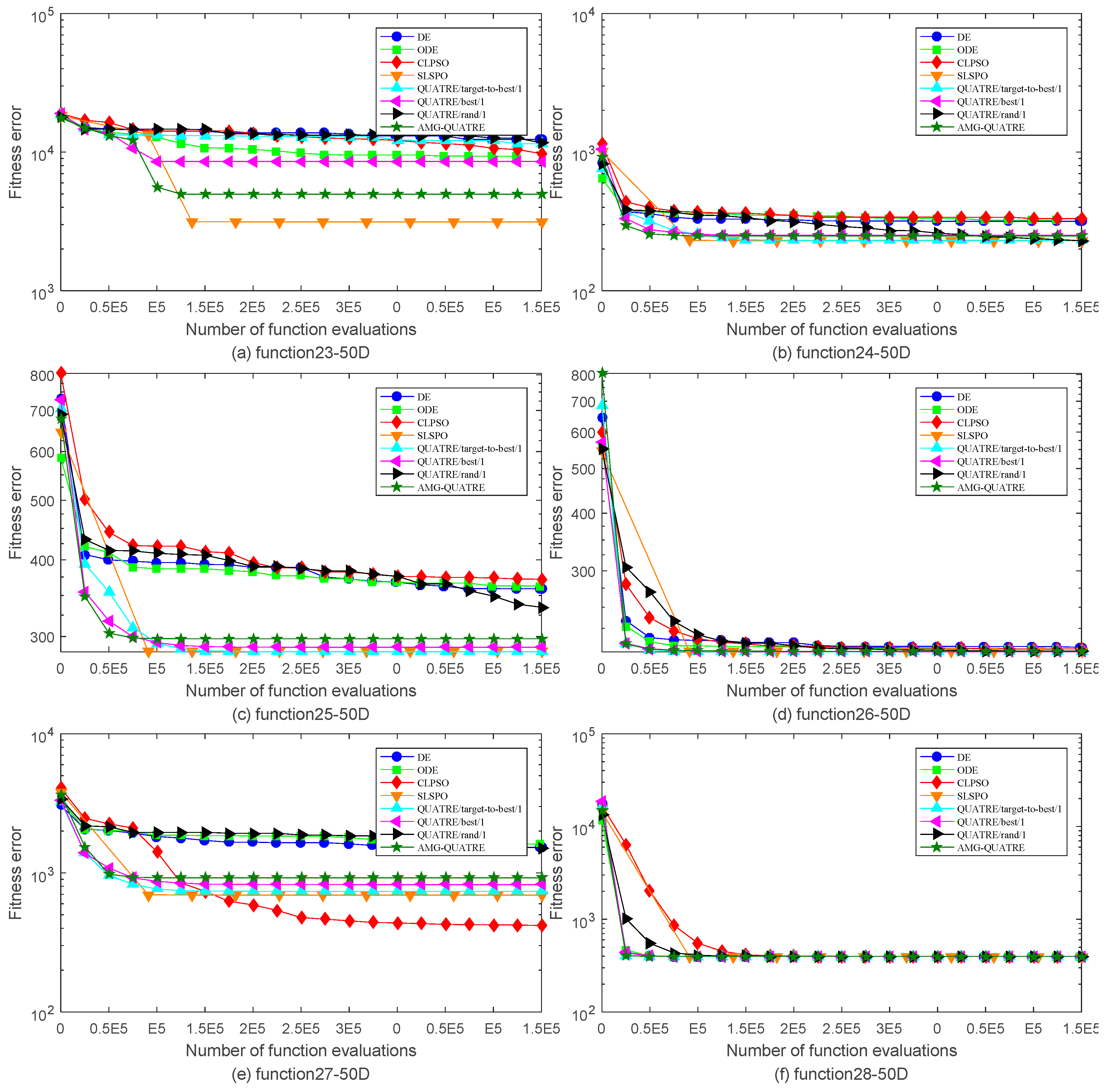
- Compared results with three QUATRE variants, two DE variants, and two PSO variants on testing CEC2013 benchmark is to evaluate confirming the performance of the proposed algorithm.
- An applied AMG-QUATRE to the node localization in WSN by modifying the average hop distance improving the DV-Hop algorithm and implementing the proposed algorithm to obtain the position of the nodes in WSN.
2. Related Works
2.1. Original QUATRE Algorithm
2.2. Statement of the Location Problem
3. Adaptation Multi-Group QUATRE Algorithm and Its Application to Node Localization in WSN
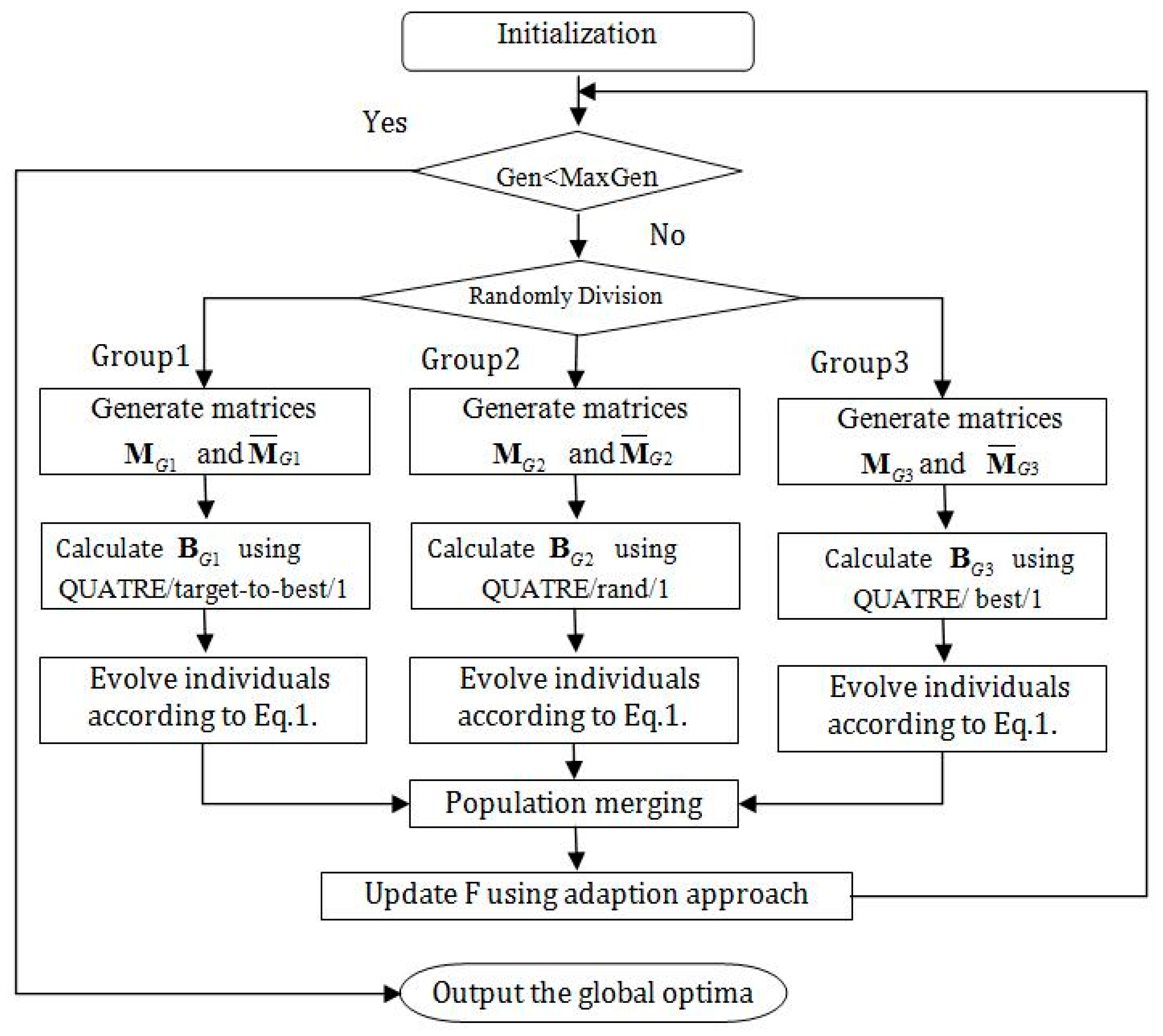
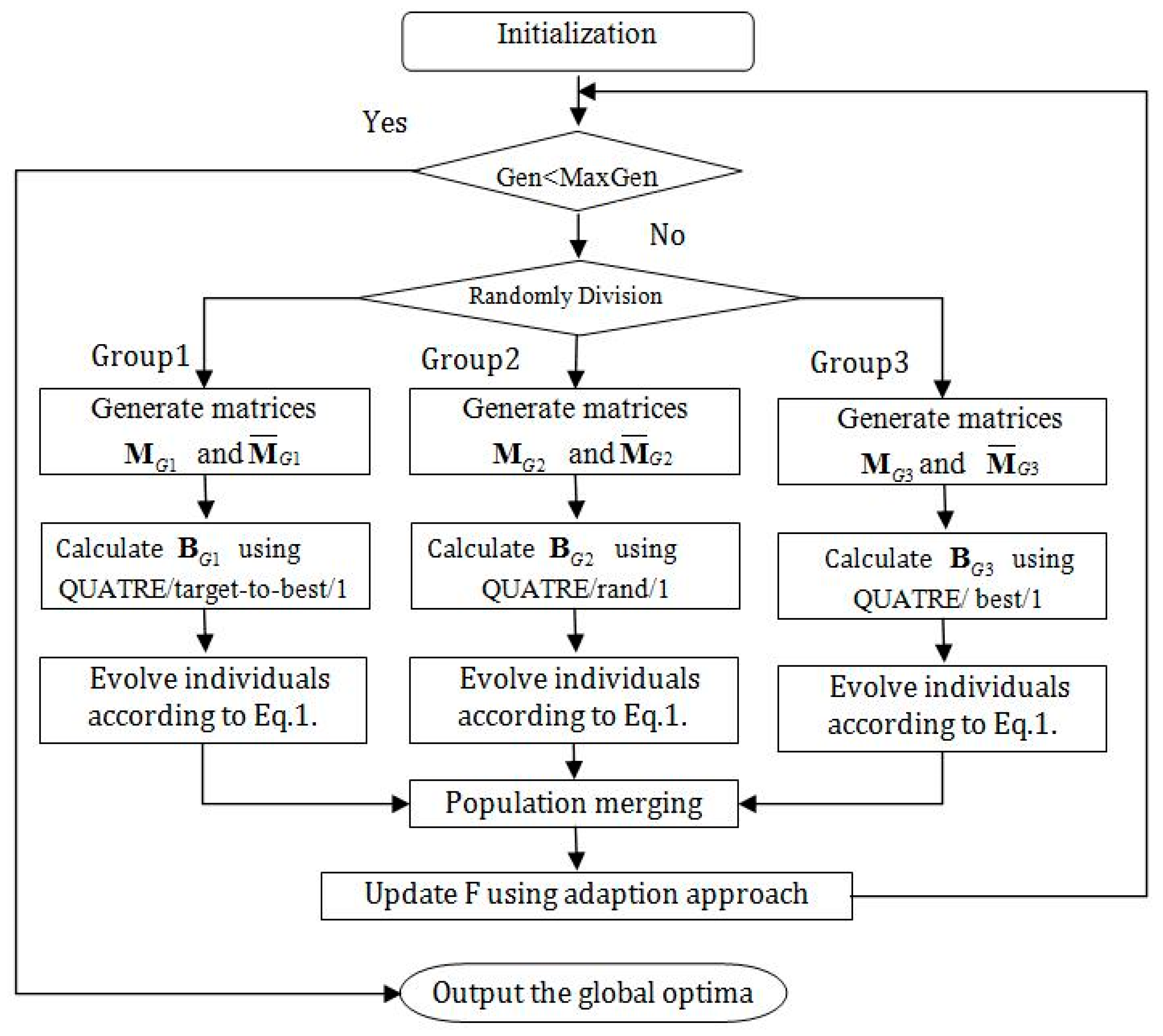
3.1. Adaptation Multi-Group QUATRE Algorithm (AMG-QUATRE)
3.1.1. Population Division and Mutation Schemes
3.1.2. Adaptation Scale Factor
| Algorithm 1. Shows the Pseudo Code of AMG-QUATRE Algorithm. |
| // Initialization phase |
| Initialize the searching space V, dimension D, Set the generation counter Gen=1, randomly initialize the population with individuals, and evaluate fitness values of all individuals, set initial , . |
| // Main loop |
| 1: while stopping criterion is not satisfied do |
| 2: Randomly partition the population into three groups, , and |
| 3: Generate matrices and , and , and , using Equation (3). |
| 4: Calculate mutation matrix using QUATRE/target-to-best/1, using QUATRE/rand/1, using QUATRE/best/1. |
| 5: Evolve individuals in each group using Equation (1). |
| 6: Evaluate fitness values of all individuals. |
| 7: for do |
| 8: if then |
| 9: |
| 10: end if |
| 11: end for |
| 12: , . |
| 13: Update scale factor F according to Equation (12). |
| 14: |
| 15: end while |
| Output: The global optimum , global best fitness value . |
3.2. Our Proposed Algorithm for DV-Hop Localization Algorithm
3.2.1. Modification of Hop Size
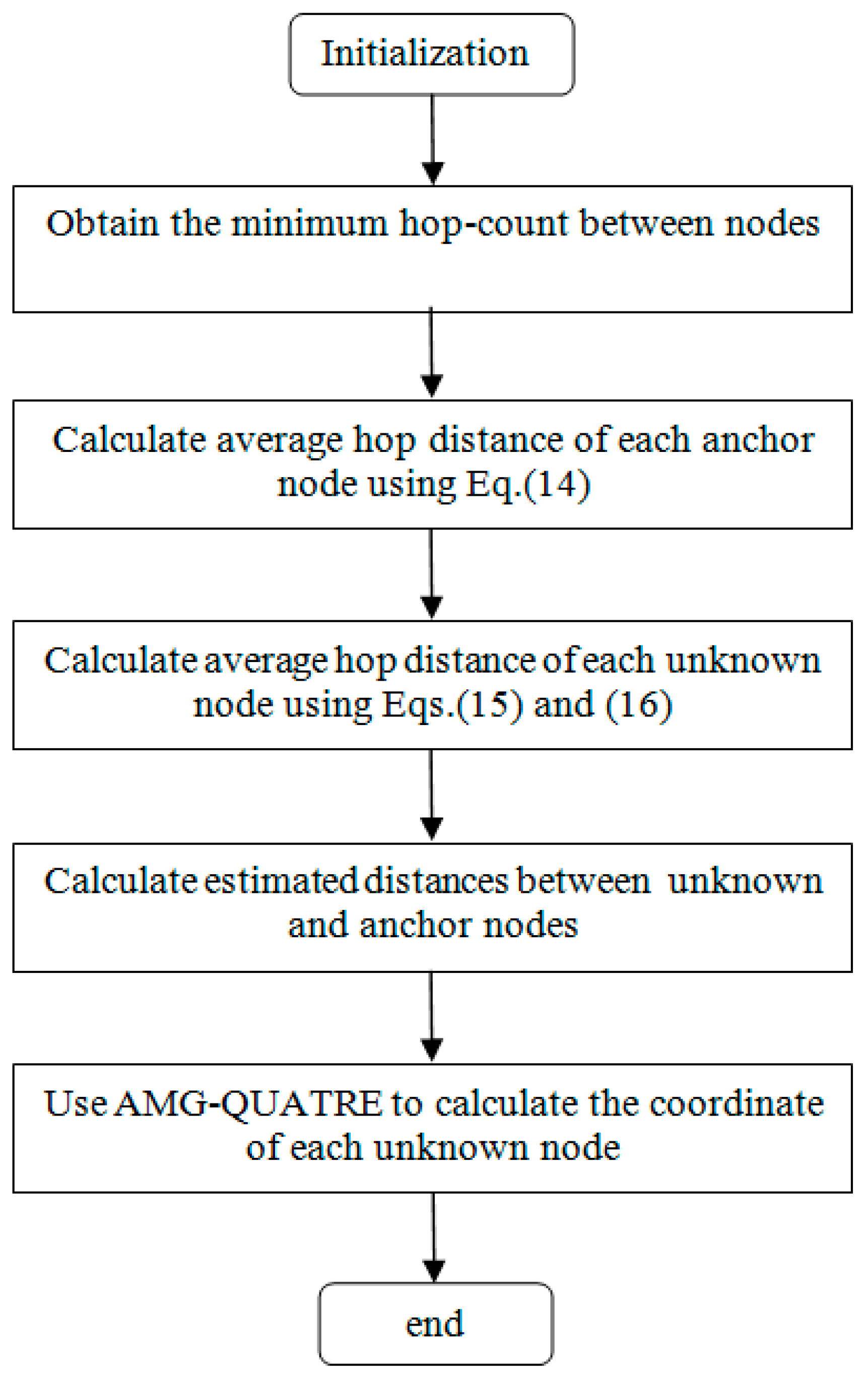
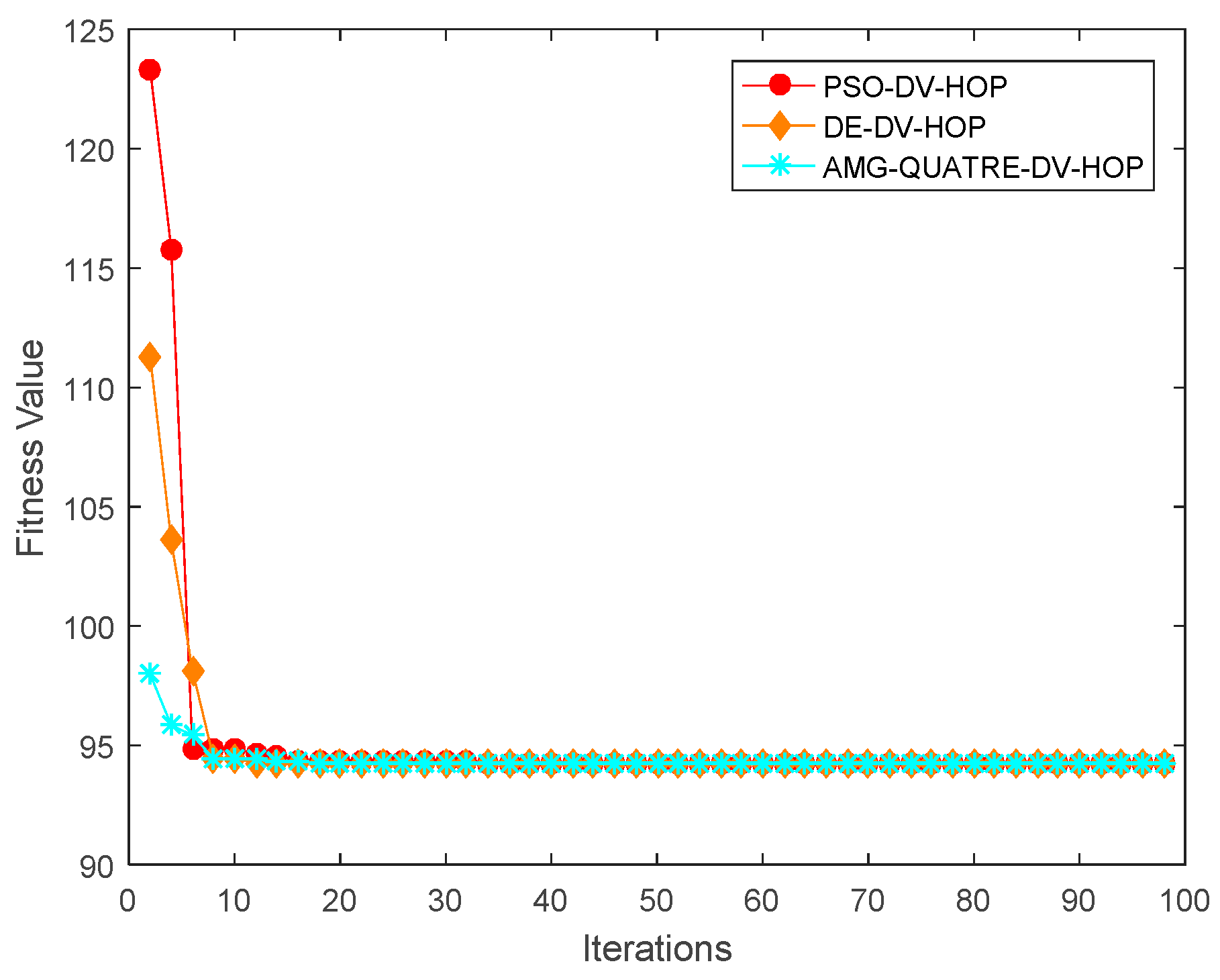
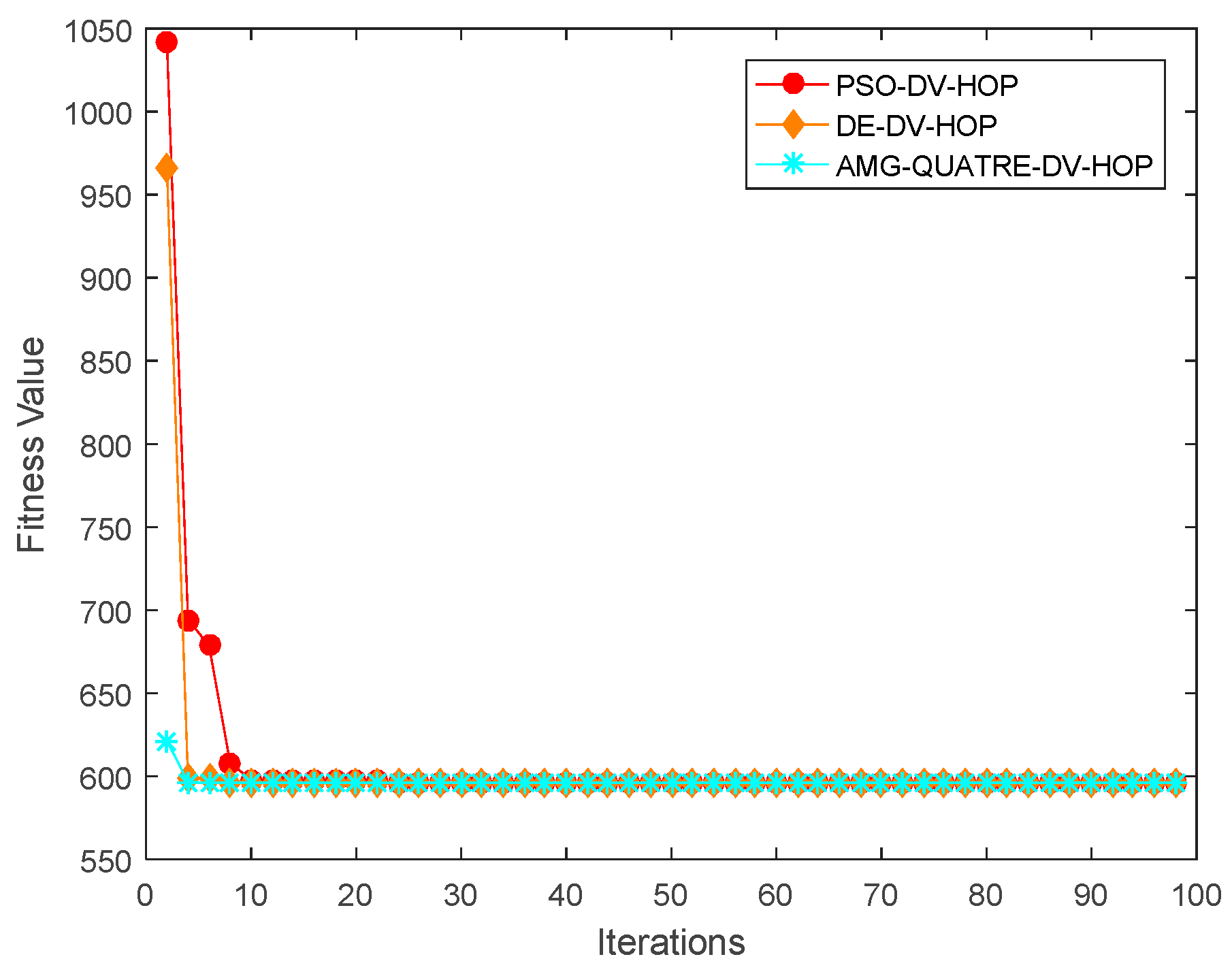
3.2.2. Using AMG-QUATRE Algorithm to Locate the Unknown Nodes
- Step 1,
- initialize parameters of AMG-QUATRE and individuals.
- Step 2,
- generate donor matrices.
- Step 3,
- generate trial matrices.
- Step 4,
- select a better vector between the trial vector and its corresponding target vector to enter the next generation. Repeat the above steps 2 to 4 until the stop condition is satisfied.
4. Experimental Analysis
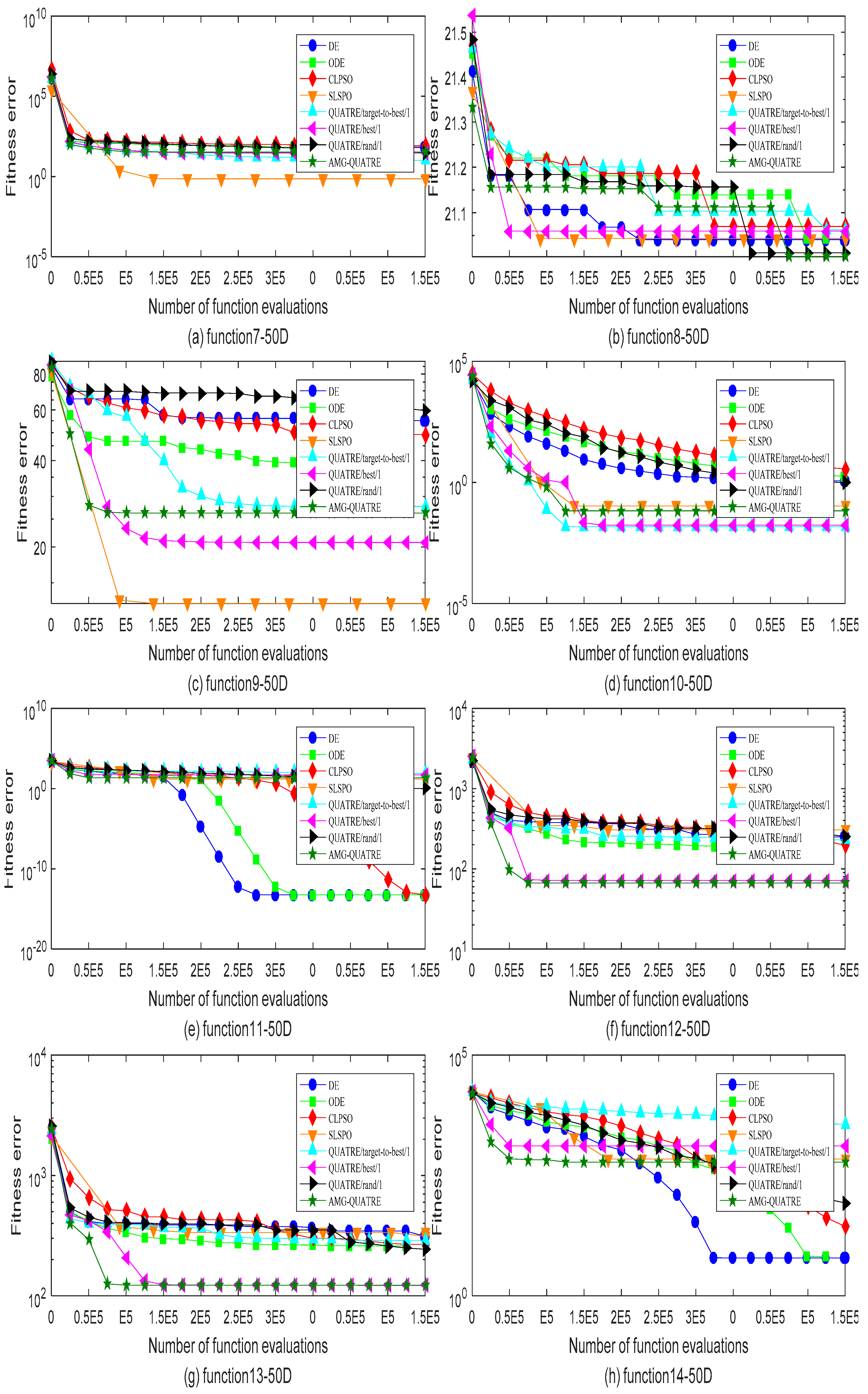
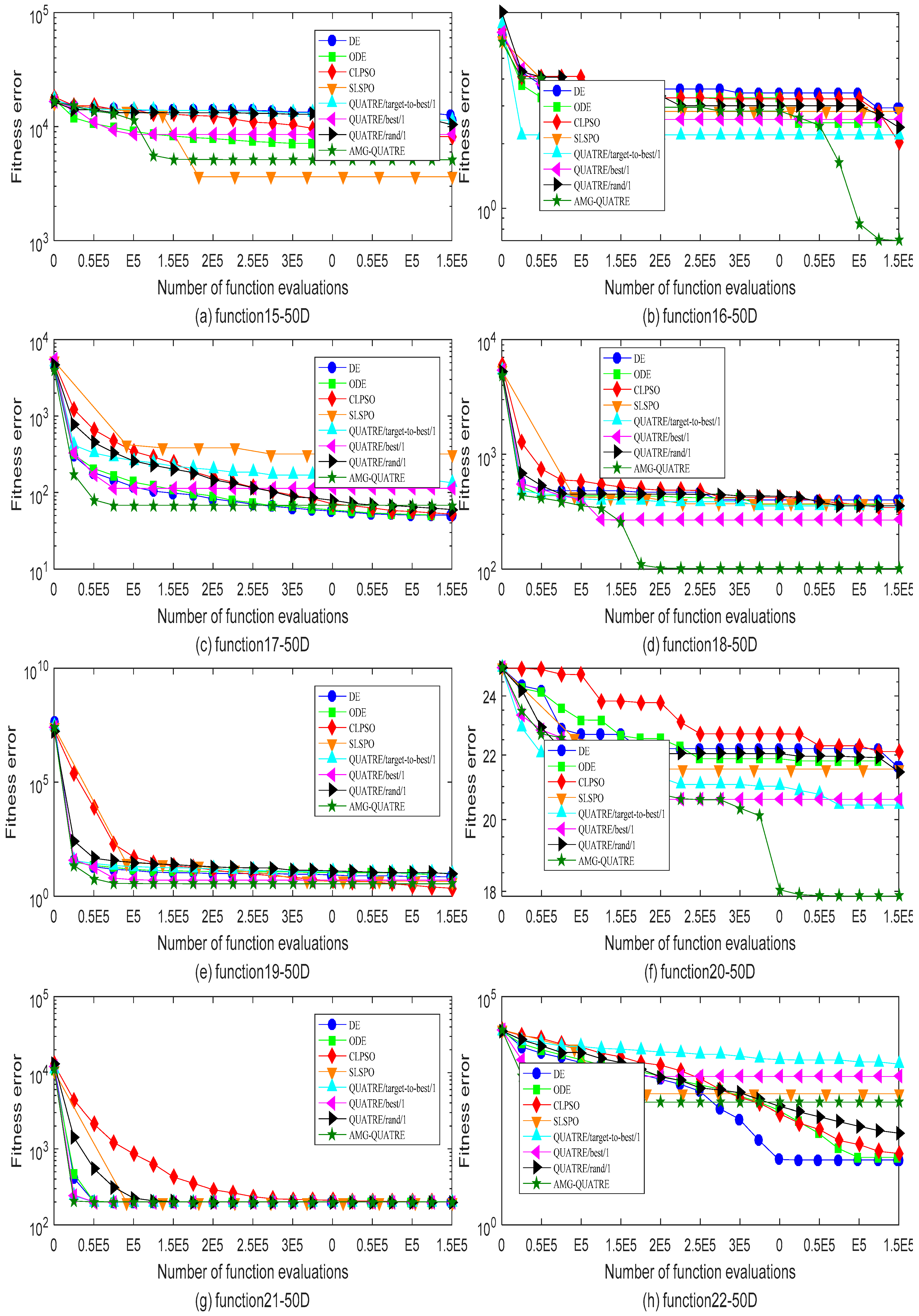
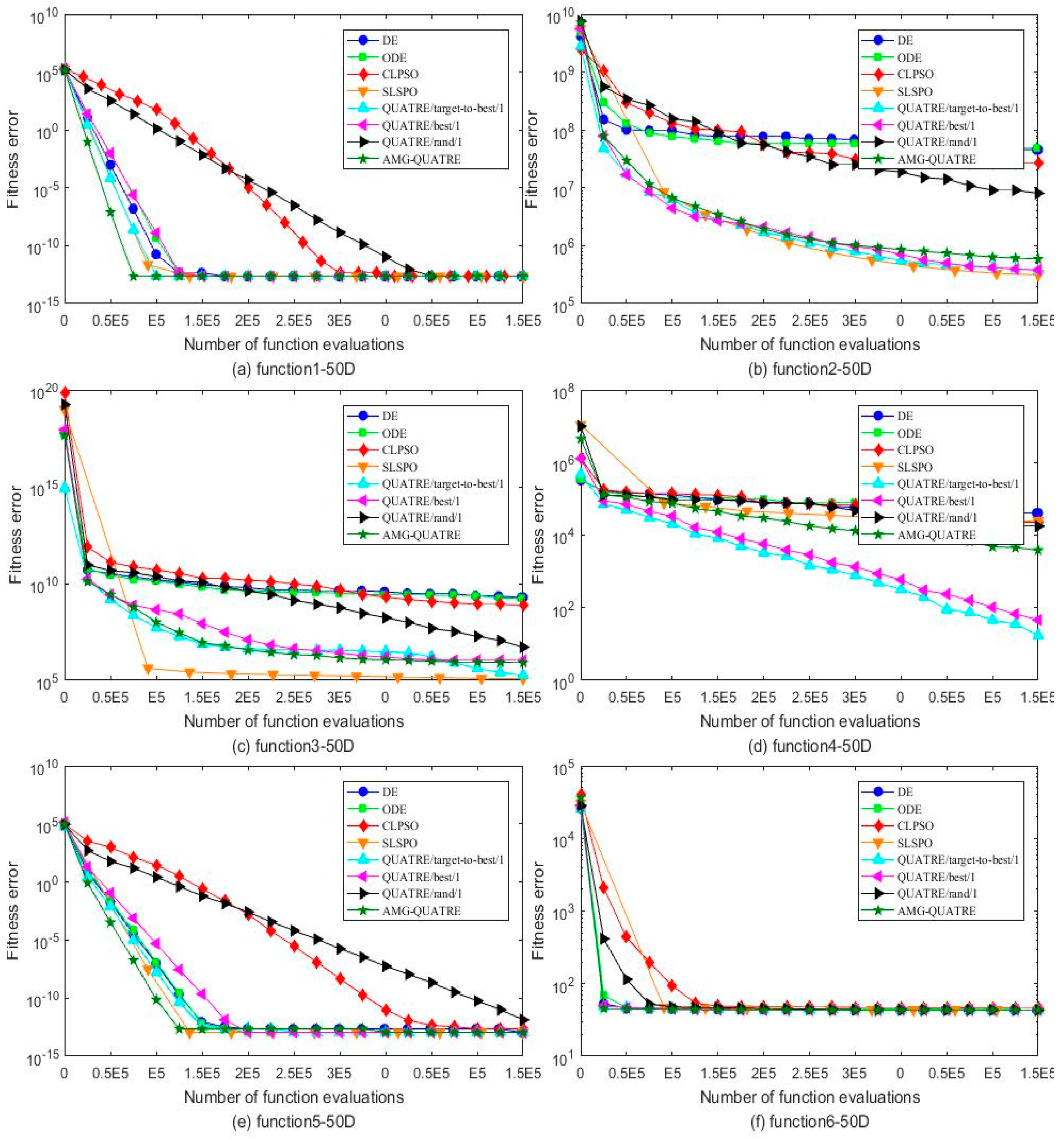
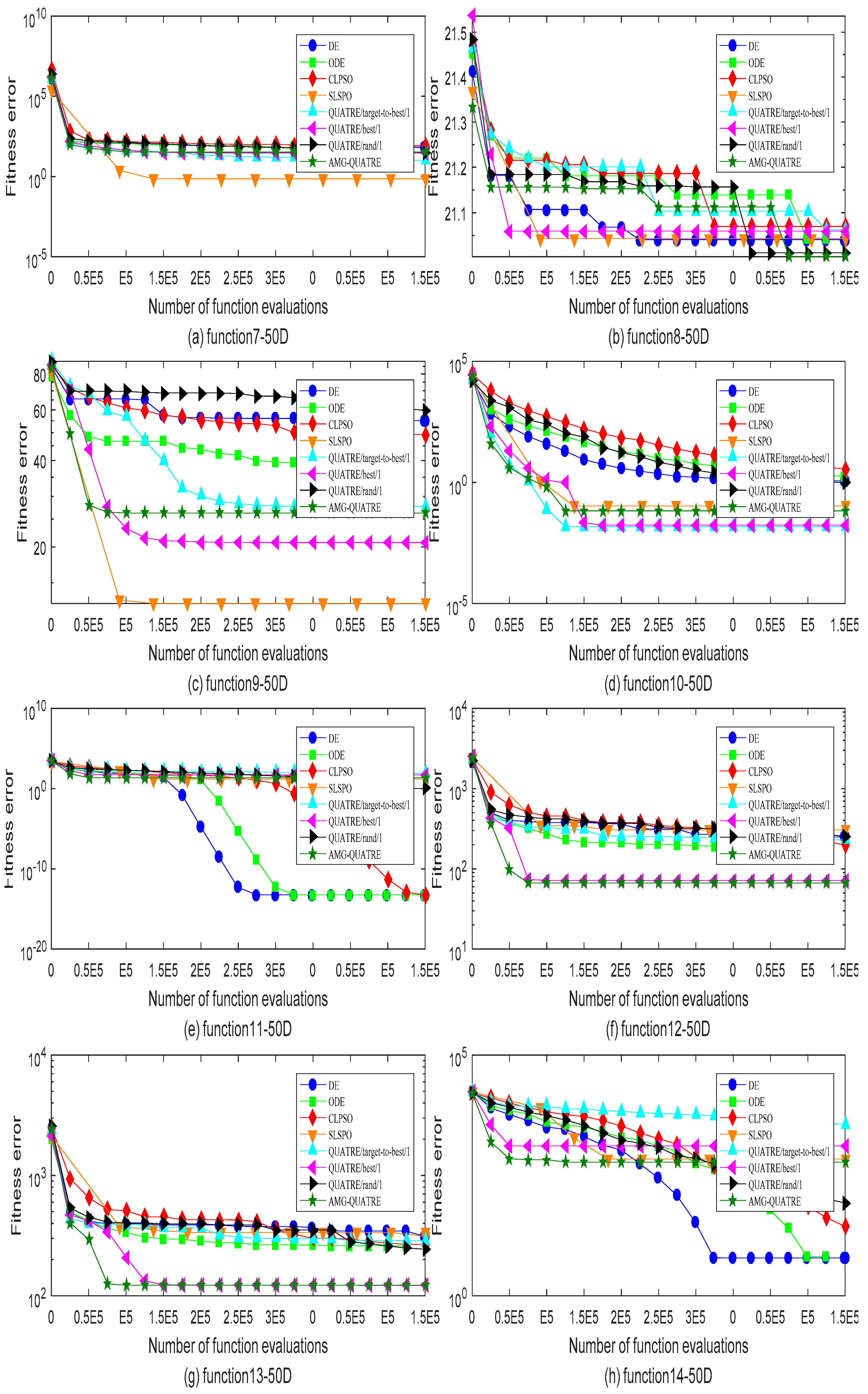
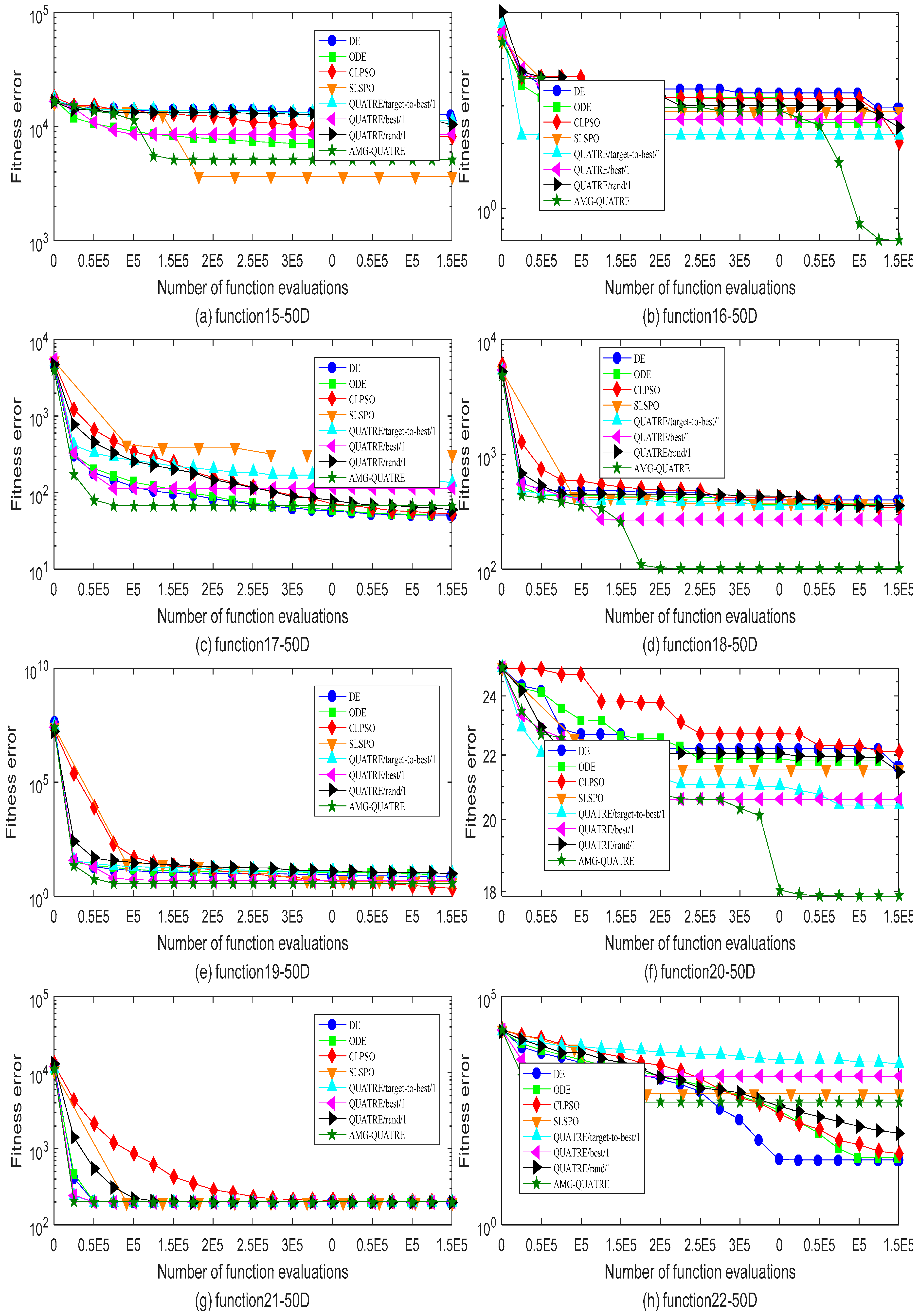
4.1. Simulation Results on Standard Bound-Constrained Benchmarks
4.2. Simulation Results of Applied AMG-QUATRE to Node Localization in WSN
4.2.1. Sensitivity of Varying Anchor Node Ratio
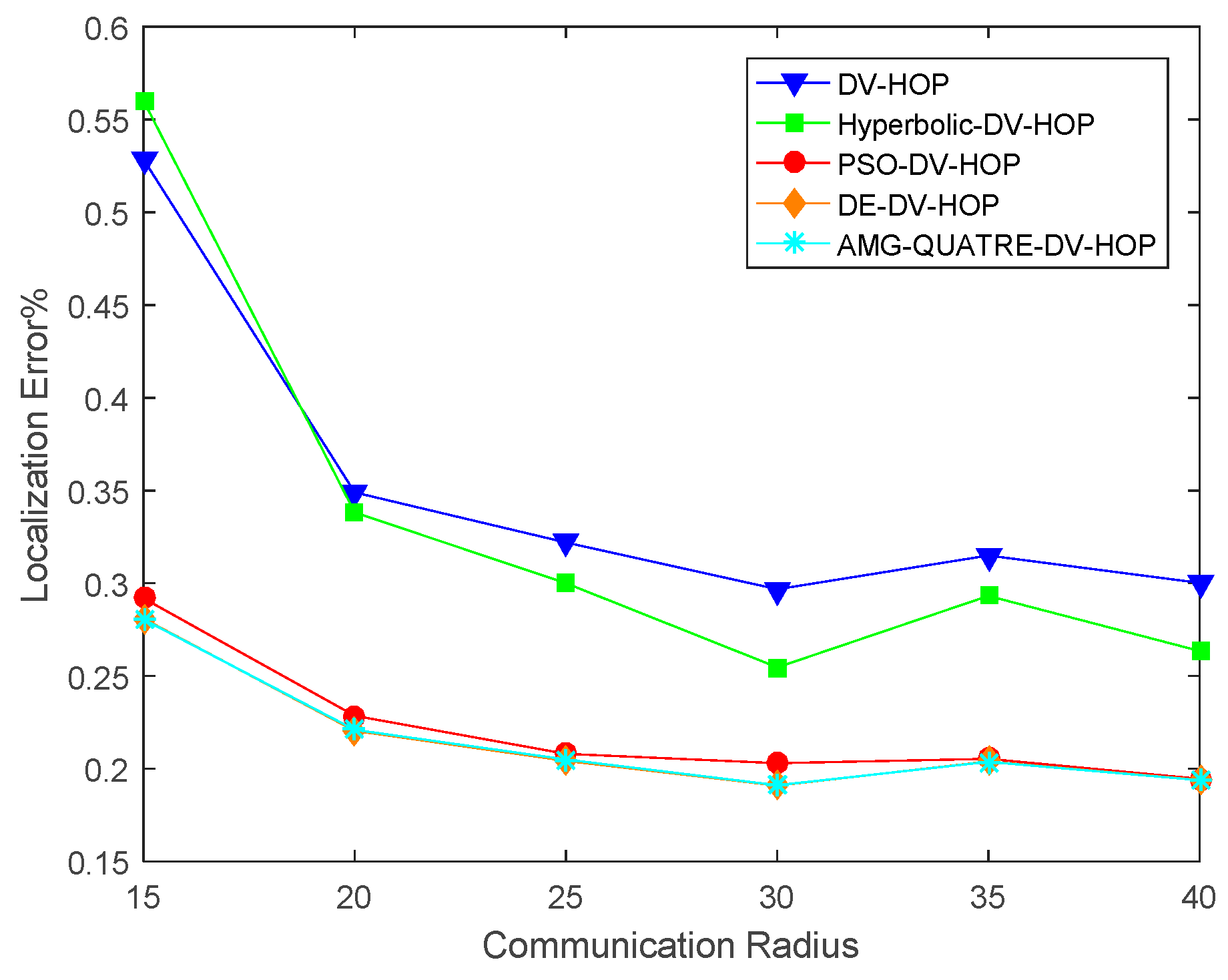
4.2.2. Sensitivity of Varying Communication Range
4.2.3. Sensitivity of Node Density
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mahdavi, S.; Shiri, M.E.; Rahnamayan, S. Metaheuristics in large-scale global continues optimization: A survey. Inf. Sci. 2015, 295, 407–428. [Google Scholar] [CrossRef]
- Beheshti, Z.; Shamsuddin, S.M.H. A review of population-based meta-heuristic algorithm. Int. J. Adv. Soft Comput. Appl. 2013, 5, 1–35. [Google Scholar]
- Dao, T.-K.; Pan, T.-S.; Nguyen, T.-T.; Pan, J.-S. Parallel bat algorithm for optimizing makespan in job shop scheduling problems. J. Intell. Manuf. 2015, 29, 1–12. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Pan, J.-S.; Dao, T.-K. A Compact Bat Algorithm for Unequal Clustering in Wireless Sensor Networks. Appl. Sci. 2019, 9, 1973. [Google Scholar] [CrossRef]
- Liu, N.; Pan, J.-S.; Nguyen, T.-T. A bi-population QUasi-Affine TRansformation Evolution algorithm for global optimization and its application to dynamic deployment in wireless sensor networks. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 175. [Google Scholar] [CrossRef]
- Goldberg, D.E. Holland, J.H. Genetic Algorithms in Search, Optimization, and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Dorigo, M.; Di Caro, G. Ant colony optimization: A new meta-heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Meng, Z.; Pan, J. HARD-DE: Hierarchical ARchive Based Mutation Strategy With Depth Information of Evolution for the Enhancement of Differential Evolution on Numerical Optimization. IEEE Access 2019, 7, 12832–12854. [Google Scholar] [CrossRef]
- Baykasolu, A.; Oumlzbakr, L.; Tapk, P. Artificial Bee Colony Algorithm and Its Application to Generalized Assignment Problem. In Swarm Intelligence, Focus on Ant and Particle Swarm Optimization; IntechOpen: London, UK, 2007. [Google Scholar] [Green Version]
- Yang, X.-S. Firefly Algorithm, Levy Flights and Global Optimization. In Research and Development in Intelligent Systems XXVI; Springer: London, UK, 2010; pp. 209–218. [Google Scholar]
- Yang, X.-S.; Hossein Gandomi, A. Bat algorithm: a novel approach for global engineering optimization. Eng. Comput. Int. J. Comput. Eng. Softw. 2012, 29, 464–483. [Google Scholar] [CrossRef] [Green Version]
- Tan, Y.; Tan, Y. Fireworks Algorithm (FWA). In Fireworks Algorithm; Springer: Berlin/Heidelberg, Germany, 2015; pp. 17–35. [Google Scholar]
- Meng, Z.; Pan, J.-S.; Xu, H. QUasi-Affine TRansformation Evolutionary (QUATRE) algorithm: A cooperative swarm based algorithm for global optimization. Knowledge-Based Syst. 2016, 109, 104–121. [Google Scholar] [CrossRef]
- Chu, S.-C.; Tsai, P.; Pan, J.-S. Cat Swarm Optimization. In PRICAI 2006: Trends in Artificial Intelligence; Yang, Q., Webb, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 854–858. [Google Scholar]
- Nguyen, T.; Pan, J.; Dao, T. An Improved Flower Pollination Algorithm for Optimizing Layouts of Nodes in Wireless Sensor Network. IEEE Access 2019, 7, 75985–75998. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Pan, J.-S.; Wu, T.-Y.; Dao, T.-K.; Nguyen, T.-D. Node Coverage Optimization Strategy Based on Ions Motion Optimization. J. Netw. Intell. 2019, 4, 1–9. [Google Scholar]
- Meng, Z.; Pan, J. QUasi-affine TRansformation Evolutionary (QUATRE) algorithm: The framework analysis for global optimization and application in hand gesture segmentation. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1832–1837. [Google Scholar]
- Meng, Z.; Pan, J. A Competitive QUasi-Affine TRansformation Evolutionary (C-QUATRE) Algorithm for global optimization. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 1644–1649. [Google Scholar]
- Pan, J.-S.; Meng, Z.; Chu, S.-C.; Roddick, J.F. QUATRE Algorithm with Sort Strategy for Global Optimization in Comparison with DE and PSO Variants. In Proceedings of the Fourth Euro-China Conference on Intelligent Data Analysis and Applications; Krömer, P., Alba, E., Pan, J.-S., Snášel, V., Eds.; Springer: Cham, Switzerland, 2018; pp. 314–323. [Google Scholar]
- Meng, Z.; Pan, J.-S. QUasi-Affine TRansformation Evolution with External ARchive (QUATRE-EAR): An enhanced structure for Differential Evolution. Knowledge-Based Syst. 2018, 155, 35–53. [Google Scholar] [CrossRef]
- Cui, L.; Li, G.; Lin, Q.; Chen, J.; Lu, N. Adaptive Differential Evolution Algorithm with Novel Mutation Strategies in Multiple Sub-populations. Comput. Oper. Res. 2015, 67, 155–173. [Google Scholar] [CrossRef]
- Chang, J.-F.; Chu, S.-C.; Roddick, J.F.; Pan, J.-S. A Parallel Particle Swarm Optimization Algorithm with Communication Strategies. J. Inf. Sci. Eng. 2005, 21, 809–818. [Google Scholar]
- Tsai, P.-W.; Pan, J.-S.; Chen, S.-M.; Liao, B.-Y. Parallel Cat Swarm Optimization. In Proceedings of the Proceedings of the seventh international conference on machine learning and cybernetics, Kunming, China, 12–15 July 2008; pp. 3328–3333. [Google Scholar]
- Angeline, P.J. Adaptive and Self-adaptive Evolutionary Computations. Comput. Intell. A Dyn. Syst. Perspect. 1995, 152–163. [Google Scholar]
- Eiben, A.E.; Hinterding, R.; Michalewicz, Z. Parameter control in evolutionary algorithms. IEEE Trans. Evol. Comput. 1999, 3, 124–141. [Google Scholar] [CrossRef]
- Pan, J.-S.; Meng, Z.; Xu, H.; Li, X. QUasi-Affine TRansformation Evolution (QUATRE) algorithm: A new simple and accurate structure for global optimization. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Morioka, Japan, 2–6 August 2016; pp. 657–667. [Google Scholar]
- Antoine-Santoni, T.; Santucci, J.-F.; De Gentili, E.; Silvani, X.; Morandini, F. Performance of a protected wireless sensor network in a fire. Analysis of fire spread and data transmission. Sensors 2009, 9, 5878–5893. [Google Scholar] [CrossRef]
- Wang, J.; Ghosh, R.K.; Das, S.K. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.-J. An intelligent data gathering schema with data fusion supported for mobile sink in wireless sensor networks. Int. J. Distrib. Sens. Networks 2019, 15, 1550147719839581. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, K.A.; Kim, H.-J. An Improved Routing Schema with Special Clustering Using PSO Algorithm for Heterogeneous Wireless Sensor Network. Sensors 2019, 19, 671. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.S.; Kong, L.; Sung, T.W.; Tsai, P.W.; Snášel, V. A clustering scheme for wireless sensor networks based on genetic algorithm and dominating set. J. Internet Technol. 2018, 19, 1111–1118. [Google Scholar]
- Peng, B.; Li, L. An improved localization algorithm based on genetic algorithm in wireless sensor networks. Cogn. Neurodyn. 2015, 9, 249–256. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hanh, N.T.; Binh, H.T.T.; Hoai, N.X.; Palaniswami, M.S. An efficient genetic algorithm for maximizing area coverage in wireless sensor networks. Inf. Sci. 2019, 488, 58–75. [Google Scholar] [CrossRef]
- Singh, S.P.; Sharma, S.C. A PSO based improved localization algorithm for wireless sensor network. Wirel. Pers. Commun. 2018, 98, 487–503. [Google Scholar] [CrossRef]
- Harikrishnan, R.; Kumar, V.J.S.; Ponmalar, P.S. Differential evolution approach for localization in wireless sensor networks. In Proceedings of the 2014 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2014; pp. 1–4. [Google Scholar]
- Sharma, G.; Kumar, A. Modified energy-efficient range-free localization using teaching–learning-based optimization for wireless sensor networks. IETE J. Res. 2018, 64, 124–138. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Pan, J.-S.; Chu, S.-C.; Roddick, J.F.; Dao, T.-K. Optimization Localization in Wireless Sensor Network Based on Multi-Objective Firefly Algorithm. J. Netw. Intell. 2016, 1, 130–138. [Google Scholar]
- Strumberger, I.; Beko, M.; Tuba, M.; Minovic, M.; Bacanin, N. Elephant Herding Optimization Algorithm for Wireless Sensor Network Localization Problem. In Technological Innovation for Resilient Systems; Camarinha-Matos, L.M., Adu-Kankam, K.O., Julashokri, M., Eds.; Springer: Cham, Switzerland, 2018; pp. 175–184. [Google Scholar]
- Strumberger, I.; Minovic, M.; Tuba, M.; Bacanin, N. Performance of Elephant Herding Optimization and Tree Growth Algorithm Adapted for Node Localization in Wireless Sensor Networks. Sensors 2019, 19, 2515. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zhang, B. Improved DV-Hop Node Localization Algorithm in Wireless Sensor Networks. Int. J. Distrib. Sens. Networks 2012, 8, 213980. [Google Scholar] [CrossRef]
- Liang, J.J.; Qu, B.Y.; Suganthan, P.N.; Hernández-Díaz, A.G. Problem Definitions and Evaluation Criteria for the CEC 2013 Special Session on Real-Parameter Optimization. Technical Report 201212. Available online: https://www.al-roomi.org/multimedia/CEC_Database/CEC2013/RealParameterOptimization/CEC2013_RealParameterOptimization_TechnicalReport.pdf (accessed on 23 September 2019).
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M.A. Opposition-Based Differential Evolution. IEEE Trans. Evol. Comput. 2008, 12, 64–79. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Cheng, R.; Jin, Y. A social learning particle swarm optimization algorithm for scalable optimization. Inf. Sci. 2015, 291, 43–60. [Google Scholar] [CrossRef]
- Song, G.; Tam, D. Two novel DV-Hop localization algorithms for randomly deployed wireless sensor networks. Int. J. Distrib. Sens. Networks 2015, 11, 187670. [Google Scholar] [CrossRef]
- Bui, D.T.; Moayedi, H.; Kalantar, B.; Osouli, A.; Pradhan, B.; Nguyen, H.; Rashid, A.S.A. A Novel Swarm Intelligence—Harris Hawks Optimization for Spatial Assessment of Landslide Susceptibility. Sensors 2019, 19, 3590. [Google Scholar] [CrossRef]
- Pan, J.S.; Lee, C.Y.; Sghaier, A.; Zeghid, M.; Xie, J. Novel Systolization of Subquadratic Space Complexity Multipliers Based on Toeplitz Matrix-Vector Product Approach. IEEE Trans. Very Large Scale Integr. Syst. 2019, 27, 1614–1622. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Wu, W.; Lim, S.-J. An Asynchronous Clustering and Mobile Data Gathering Schema based on Timer Mechanism in Wireless Sensor Networks. Comput. Mater. Contin. 2019, 58, 711–725. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K. Hye-Jin Kim Energy Efficient Routing Algorithm with Mobile Sink Support for Wireless Sensor Networks. Sensors 2019, 19, 1494. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Wang, K.; Sangaiah, A.K.; Lim, S.-J. An Affinity Propagation based Self-Adaptive Clustering Method for Wireless Sensor Networks. Sensors 2019, 19, 2579. [Google Scholar] [CrossRef]
- Pan, J.-S.; Kong, L.; Sung, T.-W.; Tsai, P.-W.; Snasel, V. alpha-Fraction First Strategy for Hierarchical Wireless Sensor Networks. J. Internet Technol. 2018, 19, 1717–1726. [Google Scholar]
- Nguyen, T.-T.; Dao, T.-K.; Kao, H.-Y.; Horng, M.-F.; Shieh, C.-S. Hybrid Particle Swarm Optimization with Artificial Bee Colony Optimization for Topology Control Scheme in Wireless Sensor Networks. J. Internet Technol. 2017, 18, 743–752. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | QUATRE/x/y | Equation |
|---|---|---|
| 1 | QUATRE/rand/1 | |
| 2 | QUATRE/best/1 | |
| 3 | QUATRE/target/1 | |
| 4 | QUATRE/target-to-best/1 | |
| 5 | QUATRE/rand/2 | |
| 6 | QUATRE/best/2 | |
| 7 | QUATRE/target/2 |
| Algorithm | Parameters Settings |
|---|---|
| DE | |
| ODE | |
| CLPSO | |
| SLPSO | |
| QUATRE variants | |
| AMG-QUATRE |
| 50D | DE/best/1/bin | ODE/best/1/bin | CLPSO | SLPSO | QUATRE/best | QUATRE/rand | QUATRE/target-to-best | AMP-QUATRE |
|---|---|---|---|---|---|---|---|---|
| 1 | 2.273 × 10−13(=) | 2.273 × 10−13(=) | 2.2737 × 10−13(=) | 2.2737 × 10−13(=) | 0.0000 × 10+00(+) | 0.0000 × 10+00(+) | 2.2737 × 10−13(=) | 2.2737 × 10−13 |
| 2 | 4.5454 × 10+07(−) | 4.871 × 10+07(−) | 5.9535 × 10+05(−) | 3.1277 × 10+05(+) | 3.8146 × 10+05(+) | 8.0401 × 10+06(−) | 3.7393 × 10+05(+) | 5.8732 × 10+05 |
| 3 | 1.9098 × 10+09(−) | 1.775 × 10+09(−) | 8.0541 × 10+06(−) | 1.2111 × 10+05(+) | 1.0726 × 10+06(−) | 5.1302 × 10+06(−) | 1.7985 × 10+05(+) | 8.3722 × 10+05 |
| 4 | 4.0671 × 10+04(−) | 4.629 × 10+04(−) | 3.818 × 10+03(−) | 2.3913 × 10+04(−) | 4.5832 × 10+01(+) | 1.7578 × 10+04(−) | 1.7273 × 10+01(+) | 3.8289 × 10+03 |
| 5 | 1.1369 × 10+1 (=) | 1.136 × 10−13(=) | 1.1369 × 10−13(−) | 1.1369 × 10−13(=) | 1.1369 × 10−13(=) | 1.3642 × 10−12(−) | 1.1369 × 10−13(=) | 1.1369 × 10−13 |
| 6 | 4.3447 × 10+01(−) | 4.415 × 10+01(−) | 4.3447 × 10+01(−) | 4.3447 × 10+01(=) | 4.3447 × 10+01(=) | 4.3447 × 10+01(−) | 4.3447 × 10+01(=) | 4.3447 × 10+01 |
| 7 | 6.4767 × 10+01(−) | 6.1526 × 10+01(−) | 3.5117 × 10+01(−) | 7.1569 × 10−01(+) | 2.9215 × 10+01(+) | 3.1212 × 10+01(+) | 9.8822 × 10+00(+) | 3.3071 × 10+01 |
| 8 | 2.1041 × 10+01(−) | 2.1044 × 10+01(−) | 2.1060 × 10+01(−) | 2.1044 × 10+01(−) | 2.1060 × 10+01(−) | 2.1012 × 10+01(−) | 2.1062 × 10+01(−) | 2.1003 × 10+01 |
| 9 | 5.5049 × 10+01(−) | 3.7639 × 10+01(−) | 2.4972 × 10+01(−) | 1.2712 × 10+01(+) | 2.0720 × 10+01(+) | 5.9709 × 10+01(−) | 2.7689 × 10+01(−) | 2.6244 × 10+01 |
| 10 | 1.1534 × 10+00(−) | 1.7926 × 10+00(−) | 5.9149 × 10−02(−) | 1.0602 × 10−01(−) | 1.7241 × 10−02(+) | 9.4477 × 10−01(−) | 1.4780 × 10−02(+) | 6.6495 × 10−02 |
| 11 | 5.6843 × 10−14(+) | 5.6843 × 10−14(+) | 2.0090 × 10+01(+) | 1.4924 × 10+01(+) | 5.2875 × 10+01(−) | 1.0379 × 10+00(+) | 7.4948 × 10+01(−) | 2.2921 × 10+01 |
| 12 | 2.5041 × 10+02(−) | 1.5262 × 10+02(−) | 6.4672 × 10+01(−) | 3.0614 × 10+02(−) | 7.1792 × 10+01(−) | 2.5256 × 10+02(−) | 2.2941 × 10+02(−) | 6.6662 × 10+01 |
| 13 | 3.1407 × 10+02(−) | 2.5190 × 10+02(−) | 1.3242 × 10+02(−) | 3.1176 × 10+02(−) | 1.2214 × 10+02(+) | 2.4339 × 10+02(−) | 2.8762 × 10+02(−) | 1.2265 × 10+02 |
| 14 | 6.0810 × 10+00(+) | 6.3847 × 10+00(+) | 3.7529 × 10+02(+) | 6.9829 × 10+02(−) | 1.2919 × 10+03(−) | 7.9588 × 10+01(+) | 3.6695 × 10+03(−) | 6.0000 × 10+02 |
| 15 | 1.1449 × 10+04(−) | 6.7771 × 10+03(−) | 5.0860 × 10+03(−) | 3.6314 × 10+03(+) | 8.5293 × 10+03(−) | 1.0372 × 10+04(−) | 1.1384 × 10+04(−) | 5.1193 × 10+03 |
| 16 | 2.9382 × 10+00(−) | 2.5038 × 10+00(−) | 2.7308 × 10−01(−) | 2.8265 × 10+00(−) | 2.5942 × 10+00(−) | 2.3831 × 10+00(−) | 2.1997 × 10+00(−) | 7.0698 × 10−01 |
| 17 | 5.0786 × 10+01(+) | 5.0800 × 10+01(+) | 7.2026 × 10+01(+) | 3.1820 × 10+02(−) | 1.1320 × 10+02(−) | 5.9894 × 10+01(+) | 1.3404 × 10+02(−) | 6.8152 × 10+01 |
| 18 | 4.0051 × 10+02(−) | 3.6304 × 10+02(−) | 9.8335 × 10+01(−) | 3.7049 × 10+02(−) | 2.6744 × 10+02(−) | 3.5631 × 10+02(−) | 3.5551 × 10+02(−) | 1.0152 × 10+02 |
| 19 | 6.6847 × 10+00(−) | 8.9514 × 10+00(−) | 4.0347 × 10+00(+) | 4.5031 × 10+00(−) | 5.0660 × 10+00(−) | 9.5681 × 10+00(−) | 1.0231 × 10+01(−) | 3.4843 × 10+00 |
| 20 | 2.1634 × 10+01(−) | 2.1809 × 10+01(−) | 1.8929 × 10+01(−) | 2.1551 × 10+01(−) | 2.0609 × 10+01(−) | 2.1465 × 10+01(−) | 2.0438 × 10+01(−) | 1.7868 × 10+01 |
| 21 | 2.0000 × 10+02(=) | 2.0000 × 10+02(=) | 2.0000 × 10+02(−) | 2.0000 × 10+02(=) | 2.0000 × 10+02(=) | 2.0000 × 10+02(=) | 2.0000 × 10+02(=) | 2.0000 × 10+02 |
| 22 | 2.6406 × 10+01(+) | 3.0189 × 10+01(+) | 6.2665 × 10+02(+) | 7.3845 × 10+02(−) | 1.7683 × 10+03(−) | 1.0261 × 10+02(+) | 3.3192 × 10+03(−) | 4.8452 × 10+02 |
| 23 | 1.2346 × 10+04(−) | 9.3380 × 10+03(−) | 4.8609 × 10+03(−) | 3.1419 × 10+03(+) | 8.5494 × 10+03(−) | 1.1668 × 10+04(−) | 1.1481 × 10+04(−) | 4.9707 × 10+03 |
| 24 | 3.1693 × 10+02(−) | 3.2104 × 10+02(−) | 2.4601 × 10+02(−) | 2.3006 × 10+02(+) | 2.5158 × 10+02(−) | 2.2959 × 10+02(+) | 2.3078 × 10+02(+) | 2.4894 × 10+02 |
| 25 | 3.5881 × 10+02(−) | 3.6268 × 10+02(−) | 3.0172 × 10+02(−) | 2.8333 × 10+02(+) | 2.8807 × 10+02(+) | 3.3466 × 10+02(−) | 2.8322 × 10+02(+) | 2.9743 × 10+02 |
| 26 | 2.0453 × 10+02(−) | 2.0252 × 10+02(−) | 2.0021 × 10+02(−) | 2.0010 × 10+02(+) | 2.0008 × 10+02(+) | 2.0071 × 10+02(−) | 2.0004 × 10+02(+) | 2.0019 × 10+02 |
| 27 | 1.5258 × 10+03(−) | 1.6157 × 10+03(−) | 7.9749 × 10+02(+) | 6.9280 × 10+02(+) | 8.2461 × 10+02(+) | 1.5090 × 10+03(−) | 7.3735 × 10+02(+) | 9.2220 × 10+02 |
| 28 | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02(=) | 4.0000 × 10+02 |
| −/=/+ | 20/4/4 | 20/4/4 | 20/2/6 | 12/5/11 | 14/4/10 | 19/2/7 | 14/5/9 | −/−/− |
| 50D | DE/best/1/bin | ODE/best/1/bin | CLPSO | SLPSO |
| 1 | 2.2737 × 10−13/0.0000 × 10+00(=) | 2.2737 × 10−13/0.0000 × 10+00(=) | 2.2737 × 10−13/0.0000 × 10+00(=) | 2.2737 × 10−13/0.0000 × 10+00(=) |
| 2 | 6.7630 × 10+07/1.4092 × 10+07(−) | 8.1854 × 10+07/1.7030 × 10+07(−) | 3.9702 × 10+07/7.0886 × 10+06(−) | 8.9731 × 10+05/3.1582 × 10+05(=) |
| 3 | 3.2967 × 10+09/1.8024 × 10+09(−) | 4.4957 × 10+09/1.4925 × 10+09(−) | 1.8074 × 10+09/9.5165 × 10+08(−) | 1.1610 × 10+07/1.4090 × 10+07(+) |
| 4 | 4.9175 × 10+04/4.9989 × 10+03(−) | 5.7660 × 10+04/8.7742 × 10+03(−) | 3.3408 × 10+04/6.0160 × 10+03(−) | 3.3850 × 10+04/1.0284 × 10+04(−) |
| 5 | 2.2737 × 10−13/3.6885 × 10−14(=) | 1.9895 × 10−13/5.0507 × 10−14(=) | 2.8990 × 10−13/5.8028 × 10−14(−) | 1.9895 × 10−13/5.0507 × 10−14(=) |
| 6 | 4.4426 × 10+01/7.7214 × 10−01(−) | 4.5560 × 10+01/1.4691 × 10+00(−) | 4.6402 × 10+01/7.0628 × 10−01(−) | 4.3447 × 10+01/1.2356 × 10−11(+) |
| 7 | 8.3113 × 10+01/1.0175 × 10+01(−) | 8.8732 × 10+01/1.2892 × 10+01(−) | 1.0165 × 10+02/8.5250 × 10+00(−) | 5.9876 × 10+00/4.8864 × 10+00(+) |
| 8 | 2.1127 × 10+01/3.5876 × 10−02(=) | 2.1143 × 10+01/3.7340 × 10−02(=) | 2.1143 × 10+01/3.7719 × 10−02(=) | 2.1119 × 10+01/3.3008 × 10−02(=) |
| 9 | 5.8061 × 10+01/1.8481 × 10+00(−) | 5.0049 × 10+01/5.9272 × 10+00(−) | 5.3471 × 10+01/2.5860 × 10+00(−) | 1.8053 × 10+01/3.5882 × 10+00(+) |
| 10 | 3.9408 × 10+00/2.0661 × 10+00(−) | 6.3503 × 10+00/4.4398 × 10+00(−) | 6.0611 × 10+00/1.4295 × 10+00(−) | 2.6597 × 10−01/1.1229 × 10−01(−) |
| 11 | 1.9402 × 10+00/1.6920 × 10+00(+) | 1.9402 × 10+00/1.5970 × 10+00(+) | 8.8107 × 10−14/2.9014 × 10−14(+) | 3.4565 × 10+01/1.1287 × 10+01(=) |
| 12 | 3.1874 × 10+02/2.7910 × 10+01(−) | 2.5954 × 10+02/3.3785 × 10+01(−) | 2.7169 × 10+02/2.8911 × 10+01(−) | 3.4056 × 10+02/1.4672 × 10+01(−) |
| 13 | 3.4943 × 10+02/1.7881 × 10+01(−) | 3.1646 × 10+02/3.3786 × 10+01(−) | 3.5904 × 10+02/3.9979 × 10+01(−) | 3.3874 × 10+02/1.0522 × 10+01(−) |
| 14 | 9.2118 × 10+01/9.8833 × 10+01(+) | 5.4027 × 10+01/6.5389 × 10+01(+) | 4.3188 × 10+01/1.1086 × 10+01(+) | 1.1953 × 10+03/3.3024 × 10+02(−) |
| 15 | 1.2980 × 10+04/6.5858 × 10+02(−) | 1.1202 × 10+04/1.7749 × 10+03(−) | 9.2360 × 10+03/5.1031 × 10+02(−) | 1.2144 × 10+04/2.9152 × 10+03(−) |
| 16 | 3.3028 × 10+00/2.1856 × 10−01(−) | 3.2672 × 10+00/3.4818 × 10−01(−) | 2.6884 × 10+00/2.9832 × 10−01(−) | 3.3398 × 10+00/2.5719 × 10−01(−) |
| 17 | 5.0939 × 10+01/2.1260 × 10−01(+) | 5.1808 × 10+01/1.0106 × 10+00(+) | 5.3451 × 10+01/5.9901 × 10−01(+) | 3.5993 × 10+02/2.4006 × 10+01(−) |
| 18 | 4.2249 × 10+02/1.4402 × 10+01(−) | 3.9685 × 10+02/1.5608 × 10+01(−) | 4.0577 × 10+02/2.3800 × 10+01(−) | 3.9239 × 10+02/1.2010 × 10+01(−) |
| 19 | 8.7896 × 10+00/7.5759 × 10−01(−) | 1.0217 × 10+01/4.9098 × 10−01(−) | 3.0401 × 10+00/4.7453 × 10−01(+) | 6.3564 × 10+00/9.8914 × 10−01(−) |
| 20 | 2.2341 × 10+01/2.9931 × 10−01(−) | 2.2343 × 10+01/2.7942 × 10−01(−) | 2.3215 × 10+01/5.3751 × 10−01(−) | 2.2119 × 10+01/3.1389 × 10−01(−) |
| 21 | 6.3252 × 10+02/4.5144 × 10+02(=) | 7.4552 × 10+02/3.8638 × 10+02(=) | 3.5629 × 10+02/1.7059 × 10+02(+) | 8.3775 × 10+02/3.5207 × 10+02(=) |
| 22 | 2.1962 × 10+02/5.4330 × 10+02(+) | 8.2888 × 10+02/8.9069 × 10+02(=) | 1.1107 × 10+02/8.2297 × 10+01(+) | 1.3757 × 10+03/3.8553 × 10+02(−) |
| 23 | 1.3292 × 10+04/4.4167 × 10+02(−) | 1.1793 × 10+04/1.2168 × 10+03(−) | 1.0989 × 10+04/7.4371 × 10+02(−) | 1.2284 × 10+04/2.2400 × 10+03(−) |
| 24 | 3.2829 × 10+02/8.3062 × 10+00(−) | 3.3833 × 10+02/1.0558 × 10+01(−) | 3.4471 × 10+02/8.4855 × 10+00(−) | 2.5367 × 10+02/1.0552 × 10+01(+) |
| 25 | 3.7028 × 10+02/7.0668 × 10+00(−) | 3.7432 × 10+02/4.9628 × 10+00(−) | 3.8750 × 10+02/7.9298 × 10+00(−) | 2.9793 × 10+02/7.6039 × 10+00(+) |
| 26 | 2.0754 × 10+02/1.6936 × 10+00(+) | 2.1829 × 10+02/5.4942 × 10+01(+) | 2.0422 × 10+02/1.0483 × 10+00(+) | 3.2412 × 10+02/4.4937 × 10+01(+) |
| 27 | 1.7343 × 10+03/8.7052 × 10+01(−) | 1.7591 × 10+03/7.7658 × 10+01(−) | 1.5672 × 10+03/4.9764 × 10+02(−) | 7.9272 × 10+02/6.7907 × 10+01(+) |
| 28 | 8.7540 × 10+02/1.1611 × 10+03(=) | 7.1055 × 10+02/9.5585 × 10+02(=) | 4.0000 × 10+02/3.8809 × 10−05(=) | 4.0000 × 10+02/1.8070 × 10−13(+) |
| −/=/+ | 18/5/5 | 18/6/4 | 18/3/7 | 13/6/9 |
| 50D | QUATRE/best | QUATRE/rand | QUATRE/target-to-best | AMP-QUATRE |
| 1 | 2.1600 × 10−13/5.0842 × 10−14(=) | 4.5475 × 10−14/9.3312 × 10−14(+) | 2.2737 × 10−13/0.0000 × 10+00(=) | 2.2737 × 10−13/0.0000 × 10+00 |
| 2 | 1.0164 × 10+06/3.7357 × 10+05(=) | 1.5023 × 10+07/4.6299 × 10+06(−) | 5.5836 × 10+05/1.8107 × 10+05(+) | 1.0360 × 10+06/3.4365 × 10+05 |
| 3 | 2.3504 × 10+07/2.4206 × 10+07(+) | 4.4566 × 10+07/3.8021 × 10+07(=) | 3.6782 × 10+06/4.3941 × 10+06(+) | 5.9671 × 10+07/7.3033 × 10+07 |
| 4 | 1.3953 × 10+02/1.1877 × 10+02(+) | 2.7389 × 10+04/4.9350 × 10+03(−) | 4.8391 × 10+01/3.2542 × 10+01(+) | 6.8604 × 10+03/1.8305 × 10+03 |
| 5 | 1.5348 × 10−13/5.5634 × 10−14(+) | 5.3547 × 10−12/2.1671 × 10−12(−) | 1.9895 × 10−13/5.0507 × 10−14(=) | 2.1600 × 10−13/5.0842 × 10−14 |
| 6 | 4.5714 × 10+01/1.0138 × 10+01(=) | 4.3448 × 10+01/2.3788 × 10−04(−) | 4.3447 × 10+01/1.5166 × 10−13(+) | 4.3741 × 10+01/1.2778 × 10+00 |
| 7 | 6.7584 × 10+01/2.9108 × 10+01(=) | 4.7842 × 10+01/8.1591 × 10+00(=) | 3.2089 × 10+01/1.3516 × 10+01(+) | 5.0112 × 10+01/1.1419 × 10+01 |
| 8 | 2.1186 × 10+01/4.1762 × 10−02(−) | 2.1130 × 10+01/4.0969 × 10−02(=) | 2.1132 × 10+01/3.3735 × 10−02(=) | 2.1129 × 10+01/4.3053 × 10−02 |
| 9 | 3.7688 × 10+01/9.3369 × 10+00(=) | 6.2639 × 10+01/1.3582 × 10+00(−) | 5.1629 × 10+01/1.2135 × 10+01(−) | 3.5635 × 10+01/5.3692 × 10+00 |
| 10 | 4.8407 × 10−02/2.7521 × 10−02(+) | 1.0614 × 10+00/4.4795 × 10−02(−) | 5.1479 × 10−02/2.2316 × 10−02(+) | 1.6877 × 10−01/9.1756 × 10−02 |
| 11 | 8.2337 × 10+01/1.8602 × 10+01(−) | 3.2253 × 10+00/1.5308 × 10+00(+) | 8.7687 × 10+01/6.7867 × 10+00(−) | 3.2670 × 10+01/7.8026 × 10+00 |
| 12 | 1.7239 × 10+02/5.2618 × 10+01(−) | 2.8889 × 10+02/1.8586 × 10+01(−) | 2.6828 × 10+02/2.2955 × 10+01(−) | 9.6453 × 10+01/1.9272 × 10+01 |
| 13 | 2.4279 × 10+02/6.2197 × 10+01(−) | 3.2962 × 10+02/2.8567 × 10+01(−) | 3.2354 × 10+02/1.9088 × 10+01(−) | 1.8994 × 10+02/3.9348 × 10+01 |
| 14 | 2.0942 × 10+03/4.5566 × 10+02(−) | 1.0795 × 10+02/2.0880 × 10+01(+) | 4.0460 × 10+03/2.6165 × 10+02(−) | 9.4145 × 10+02/2.6942 × 10+02 |
| 15 | 1.0621 × 10+04/1.3099 × 10+03(−) | 1.2616 × 10+04/7.7705 × 10+02(−) | 1.2556 × 10+04/4.3565 × 10+02(−) | 6.7499 × 10+03/9.2335 × 10+02 |
| 16 | 3.2825 × 10+00/3.6056 × 10−01(−) | 3.2270 × 10+00/3.4962 × 10−01(−) | 3.1910 × 10+00/3.5035 × 10−01(−) | 2.1841 × 10+00/6.6439 × 10−01 |
| 17 | 1.4570 × 10+02/2.2191 × 10+01(−) | 6.3096 × 10+01/2.0368 × 10+00(+) | 1.4326 × 10+02/6.5122 × 10+00(−) | 8.4913 × 10+01/1.1647 × 10+01 |
| 18 | 3.3174 × 10+02/4.0023 × 10+01(−) | 3.9469 × 10+02/1.6971 × 10+01(−) | 3.8234 × 10+02/1.6744 × 10+01(−) | 1.3042 × 10+02/1.7501 × 10+01 |
| 19 | 8.9865 × 10+00/2.3915 × 10+00(−) | 1.1791 × 10+01/1.0069 × 10+00(−) | 1.1623 × 10+01/6.9306 × 10−01(−) | 5.7073 × 10+00/1.2275 × 10+00 |
| 20 | 2.1561 × 10+01/6.1393 × 10−01(−) | 2.2261 × 10+01/2.7190 × 10−01(−) | 2.1631 × 10+01/4.1090 × 10−01(−) | 1.9466 × 10+01/9.0364 × 10−01 |
| 21 | 7.5331 × 10+02/4.6351 × 10+02(=) | 3.3833 × 10+02/3.3784 × 10+02(+) | 6.9616 × 10+02/4.2920 × 10+02(=) | 8.3451 × 10+02/3.9226 × 10+02 |
| 22 | 2.7567 × 10+03/5.0416 × 10+02(−) | 1.5228 × 10+02/3.7961 × 10+01(+) | 4.0302 × 10+03/3.6030 × 10+02(−) | 1.0156 × 10+03/3.1553 × 10+02 |
| 23 | 1.0749 × 10+04/1.2205 × 10+03(−) | 1.2862 × 10+04/5.9890 × 10+02(−) | 1.2310 × 10+04/4.3309 × 10+02(−) | 7.3067 × 10+03/1.1271 × 10+03 |
| 24 | 2.8054 × 10+02/1.6244 × 10+01(=) | 2.5232 × 10+02/2.0385 × 10+01(+) | 2.5944 × 10+02/1.5156 × 10+01(+) | 2.7678 × 10+02/1.4085 × 10+01 |
| 25 | 3.1143 × 10+02/1.3222 × 10+01(=) | 3.6970 × 10+02/1.5311 × 10+01(−) | 3.0858 × 10+02/1.7011 × 10+01(=) | 3.1547 × 10+02/1.2938 × 10+01 |
| 26 | 3.7335 × 10+02/4.4089 × 10+01(=) | 2.7737 × 10+02/1.1776 × 10+02(=) | 3.4616 × 10+02/6.6582 × 10+01(+) | 3.7563 × 10+02/4.3086 × 10+01 |
| 27 | 1.1743 × 10+03/2.1424 × 10+02(=) | 1.8024 × 10+03/1.0782 × 10+02(−) | 9.5415 × 10+02/1.3437 × 10+02(+) | 1.1754 × 10+03/1.3799 × 10+02 |
| 28 | 1.1486 × 10+03/1.3303 × 10+03(=) | 4.0000 × 10+02/3.5987 × 10−09(+) | 8.4294 × 10+02/1.0819 × 10+03(=) | 1.1617 × 10+03/1.3536 × 10+03 |
| −/=/+ | 13/11/4 | 16/4/8 | 13/6/9 | −/−/− |
| Simulation Parameters | Parameters Settings |
|---|---|
| Sensing region area | 100 m × 100 m |
| Total number of sensor nodes | 100–400 |
| Communication range | 15–40 m |
| Percentage of anchor nodes | 5–40% |
| Initial population size | 20 |
| Maximum generations | 100 |
| Anchor Nodes | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | Avg |
|---|---|---|---|---|---|---|---|---|---|
| DV-Hop | 0.495 | 0.4227 | 0.423 | 0.349 | 0.3513 | 0.346 | 0.322 | 0.3213 | 0.378788 |
| Hyperbolic-DV-Hop | 0.4847 | 0.3716 | 0.3641 | 0.3382 | 0.3004 | 0.3185 | 0.3023 | 0.2834 | 0.3454 |
| PSO-DV-Hop | 0.4855 | 0.2979 | 0.2554 | 0.2289 | 0.2004 | 0.2001 | 0.1931 | 0.188 | 0.256163 |
| DE-DV-Hop | 0.4423 | 0.2634 | 0.2525 | 0.2207 | 0.1995 | 0.1997 | 0.1937 | 0.1849 | 0.244588 |
| AMG-QUATRE-DV-Hop | 0.4255 | 0.2605 | 0.2525 | 0.2209 | 0.1993 | 0.1995 | 0.1934 | 0.1855 | 0.242138 |
| Communication Range | 15 | 20 | 25 | 30 | 35 | 40 | Avg. |
|---|---|---|---|---|---|---|---|
| DV-Hop | 0.5286 | 0.349 | 0.3219 | 0.2968 | 0.3149 | 0.3002 | 0.3519 |
| Hyperbolic-DV-Hop | 0.5603 | 0.3382 | 0.3 | 0.2546 | 0.2931 | 0.2634 | 0.334933 |
| PSO-DV-Hop | 0.2919 | 0.2286 | 0.2081 | 0.203 | 0.2053 | 0.1945 | 0.2219 |
| DE-DV-Hop | 0.281 | 0.2204 | 0.2042 | 0.1909 | 0.2038 | 0.194 | 0.215717 |
| AMG-QUATRE-DV-Hop | 0.2806 | 0.2209 | 0.205 | 0.1911 | 0.2037 | 0.1939 | 0.215867 |
| Sensor Nodes | 100 | 150 | 200 | 250 | 300 | 350 | 400 | Avg. |
|---|---|---|---|---|---|---|---|---|
| DV-Hop | 0.4645 | 0.3711 | 0.349 | 0.3771 | 0.3513 | 0.3022 | 0.2887 | 0.3577 |
| Hyperbolic-DV-Hop | 0.3745 | 0.3368 | 0.3382 | 0.3067 | 0.3166 | 0.2998 | 0.2818 | 0.322057 |
| PSO-DV-Hop | 0.3106 | 0.3178 | 0.2342 | 0.2303 | 0.1887 | 0.1784 | 0.1741 | 0.233443 |
| DE-DV-Hop | 0.2967 | 0.2777 | 0.2205 | 0.2234 | 0.1828 | 0.1769 | 0.1741 | 0.221729 |
| AMG-QUATRE-DV-Hop | 0.2979 | 0.284 | 0.2209 | 0.2225 | 0.1816 | 0.1773 | 0.1742 | 0.222629 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Pan, J.-S.; Wang, J.; Nguyen, T.-T. An Adaptation Multi-Group Quasi-Affine Transformation Evolutionary Algorithm for Global Optimization and Its Application in Node Localization in Wireless Sensor Networks. Sensors 2019, 19, 4112. https://doi.org/10.3390/s19194112
Liu N, Pan J-S, Wang J, Nguyen T-T. An Adaptation Multi-Group Quasi-Affine Transformation Evolutionary Algorithm for Global Optimization and Its Application in Node Localization in Wireless Sensor Networks. Sensors. 2019; 19(19):4112. https://doi.org/10.3390/s19194112
Chicago/Turabian StyleLiu, Nengxian, Jeng-Shyang Pan, Jin Wang, and Trong-The Nguyen. 2019. "An Adaptation Multi-Group Quasi-Affine Transformation Evolutionary Algorithm for Global Optimization and Its Application in Node Localization in Wireless Sensor Networks" Sensors 19, no. 19: 4112. https://doi.org/10.3390/s19194112
APA StyleLiu, N., Pan, J.-S., Wang, J., & Nguyen, T.-T. (2019). An Adaptation Multi-Group Quasi-Affine Transformation Evolutionary Algorithm for Global Optimization and Its Application in Node Localization in Wireless Sensor Networks. Sensors, 19(19), 4112. https://doi.org/10.3390/s19194112