Lychee Fruit Detection Based on Monocular Machine Vision in Orchard Environment

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials
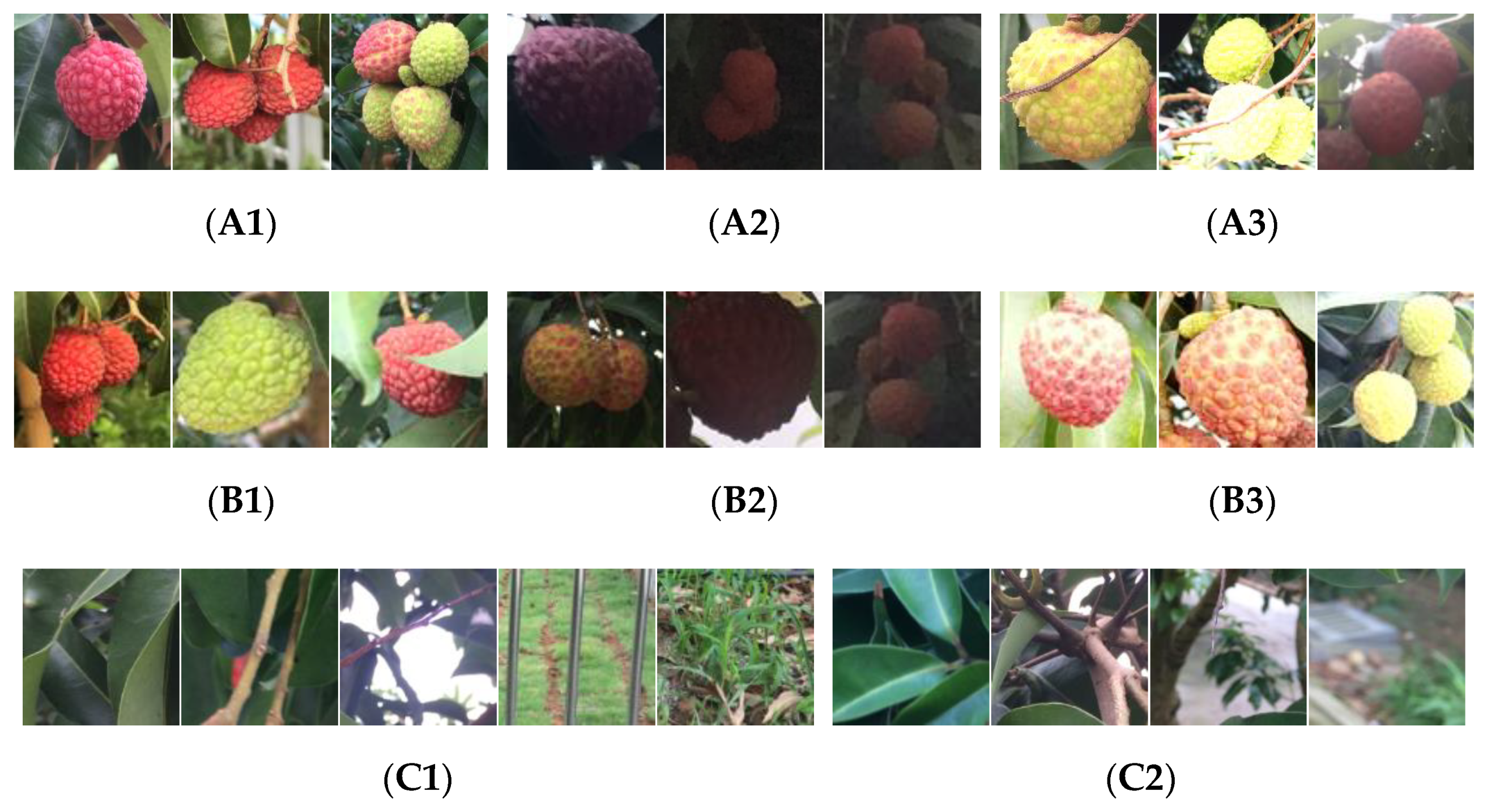
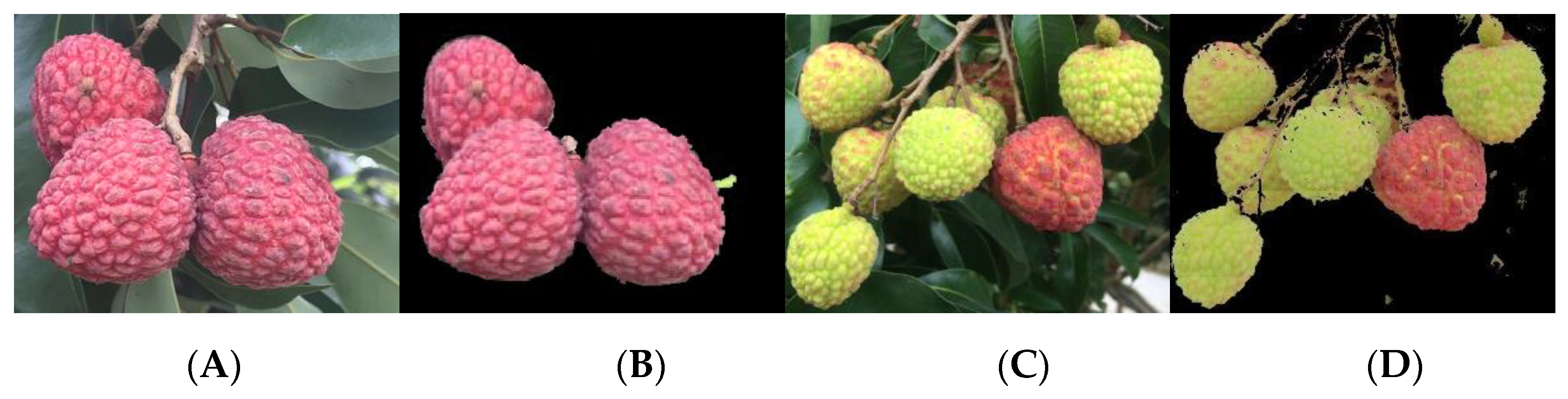
2.1. Datasets
2.2. Application Hardware Architecture Design
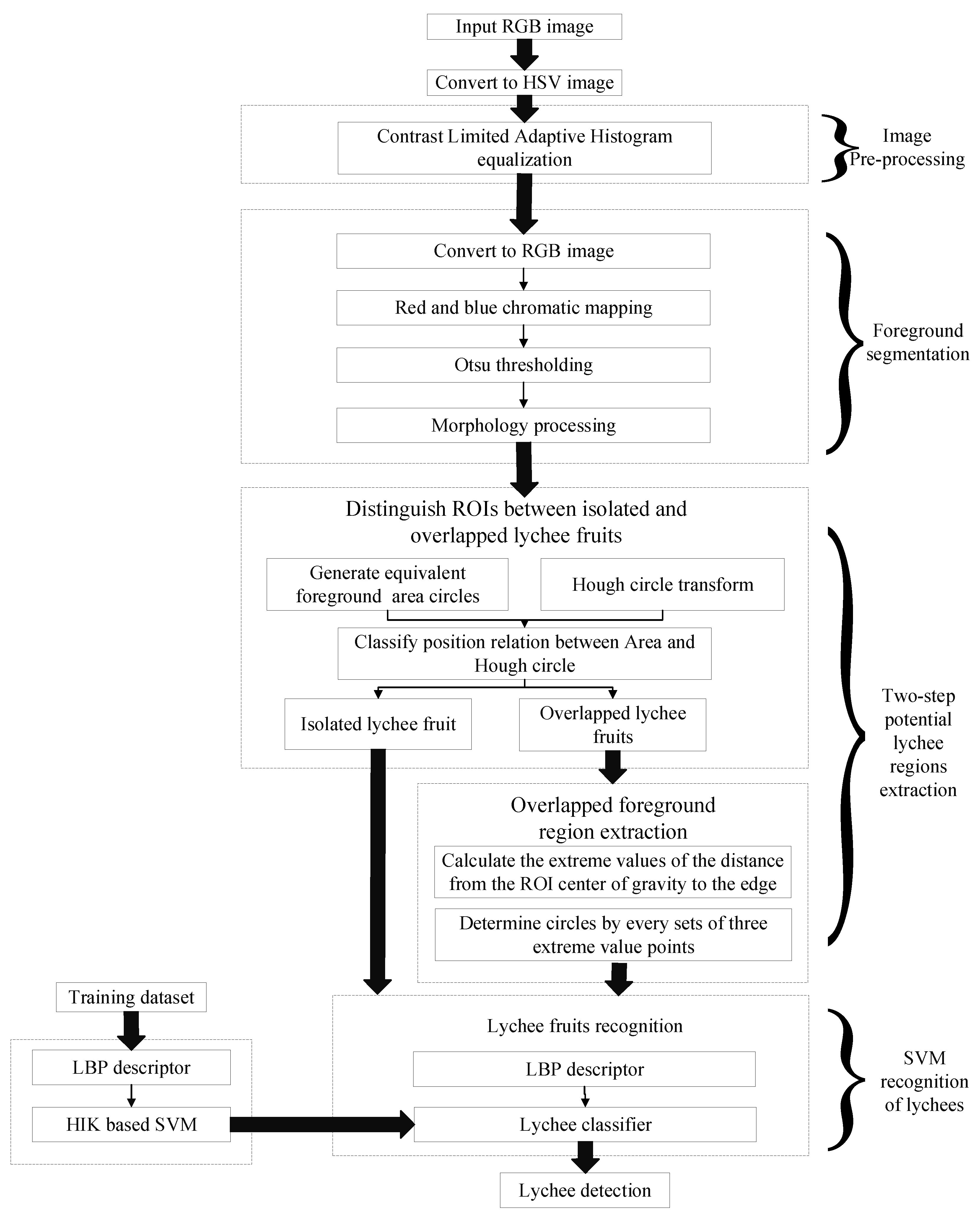
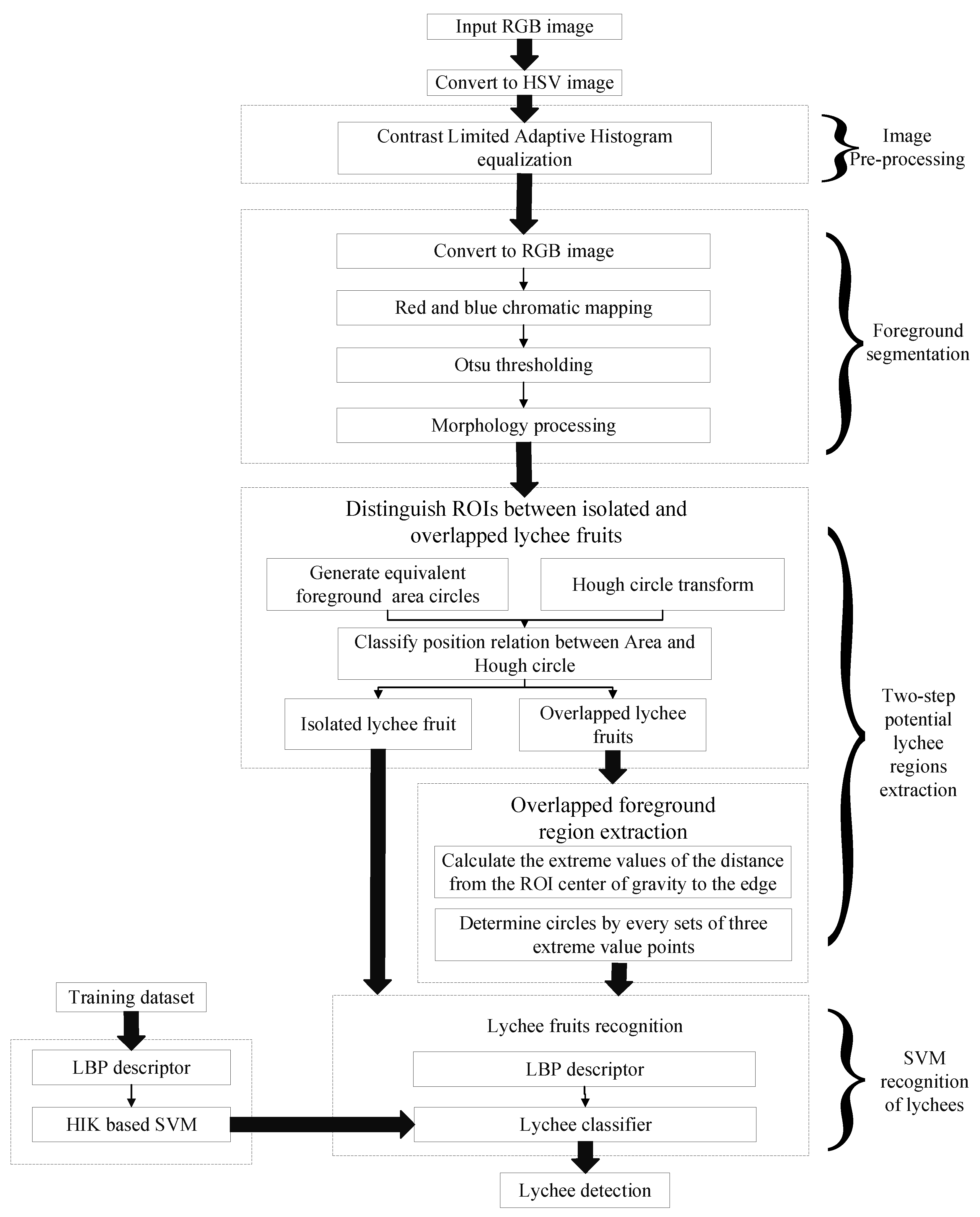
3. Lychee Fruit Detection Method
3.1. Image Preprocessing and Foreground Segmentation
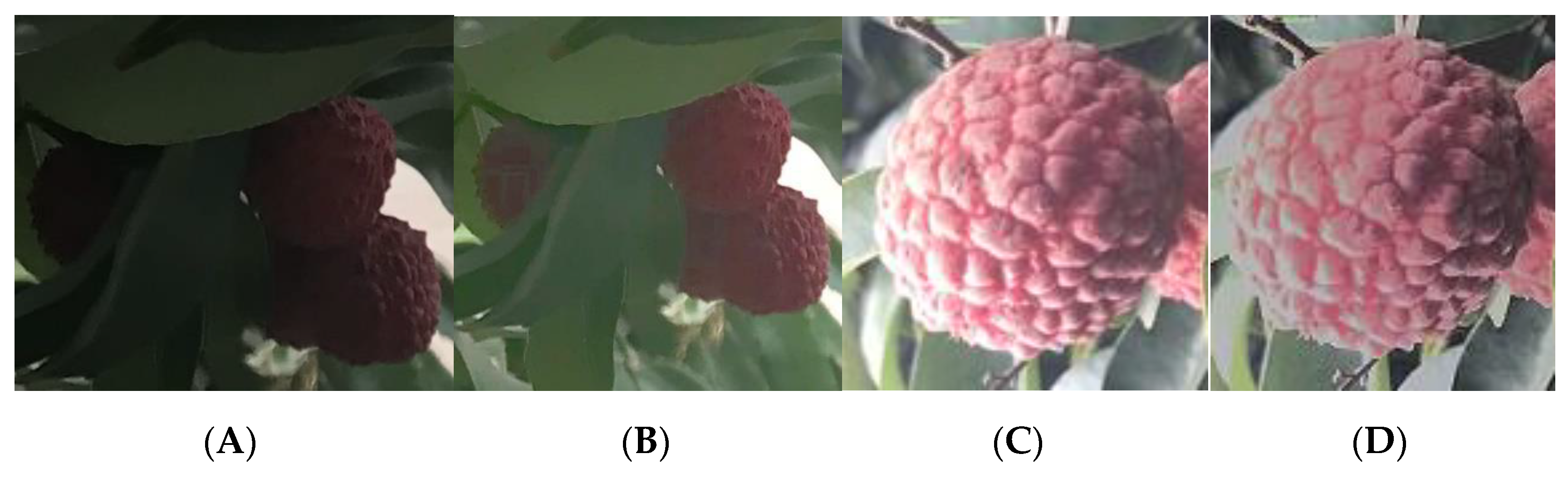
3.1.1. Image Preprocessing
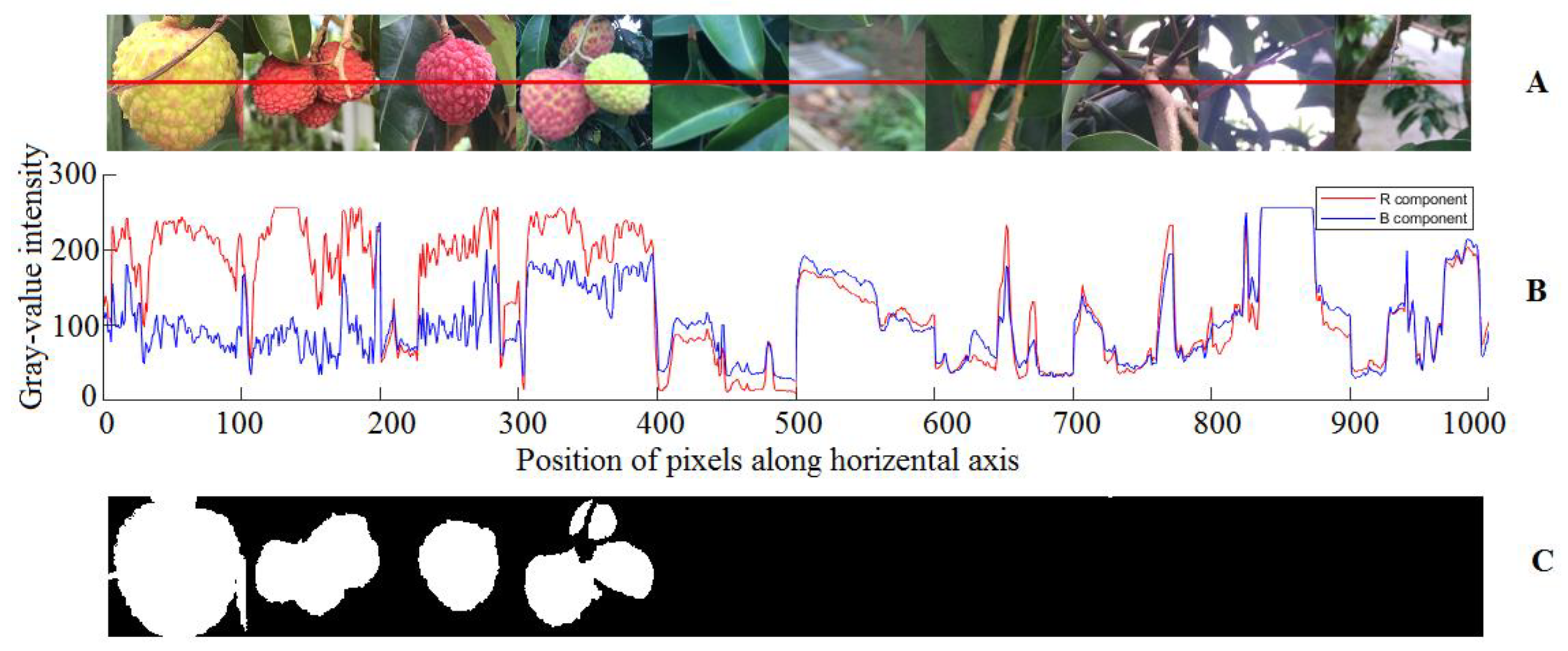
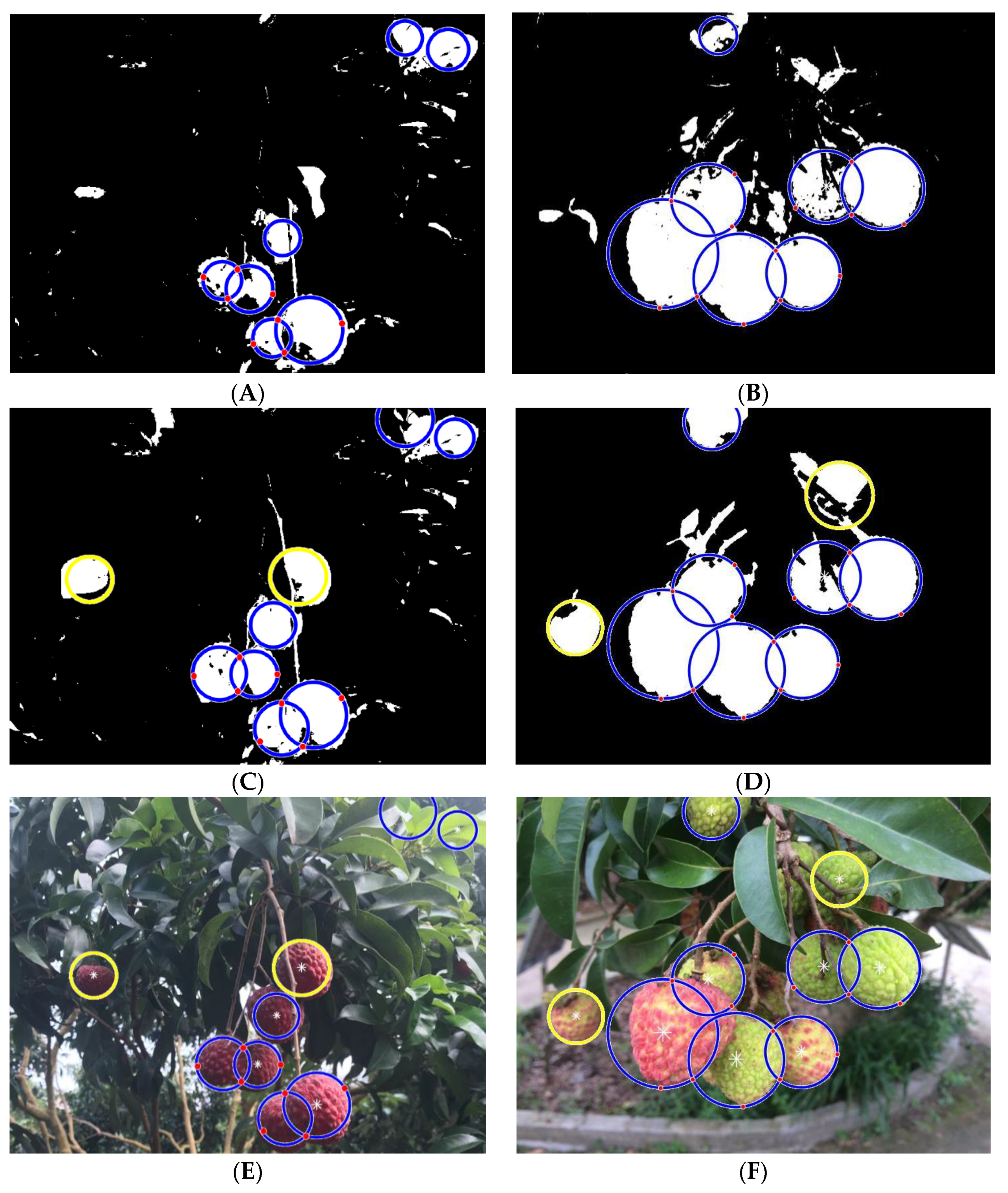
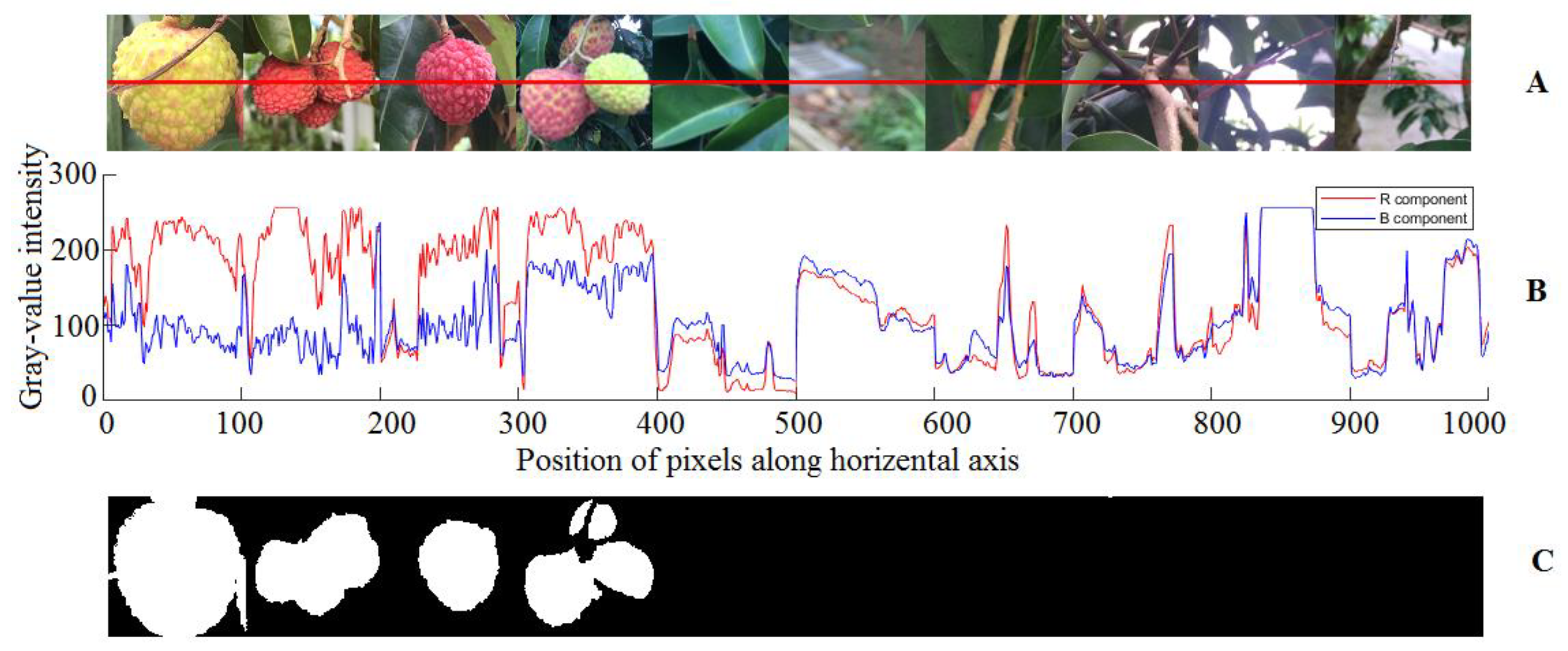
3.1.2. Lychee Foreground Segmentation
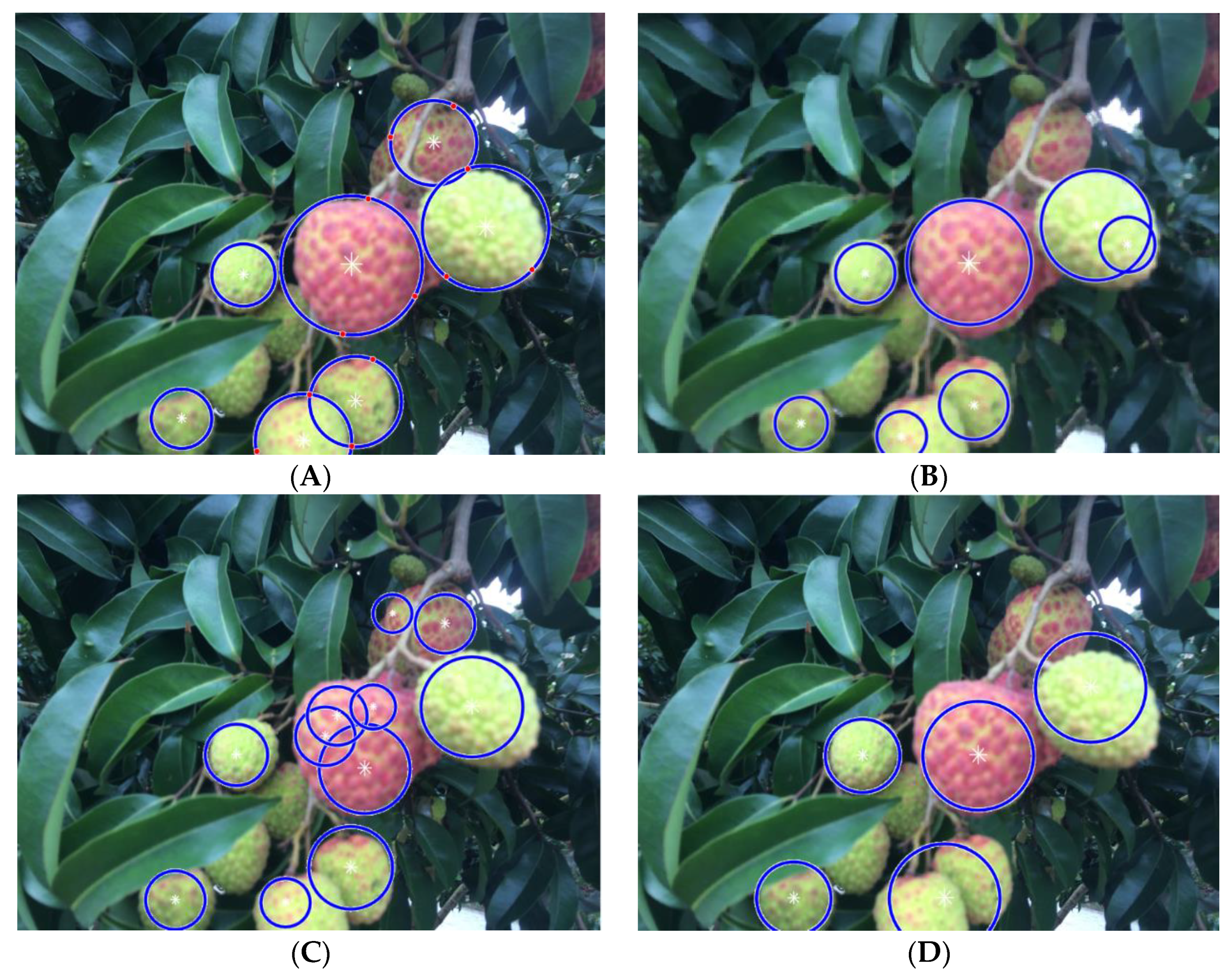
3.2. Two-Step Potential Lychee Region Extraction
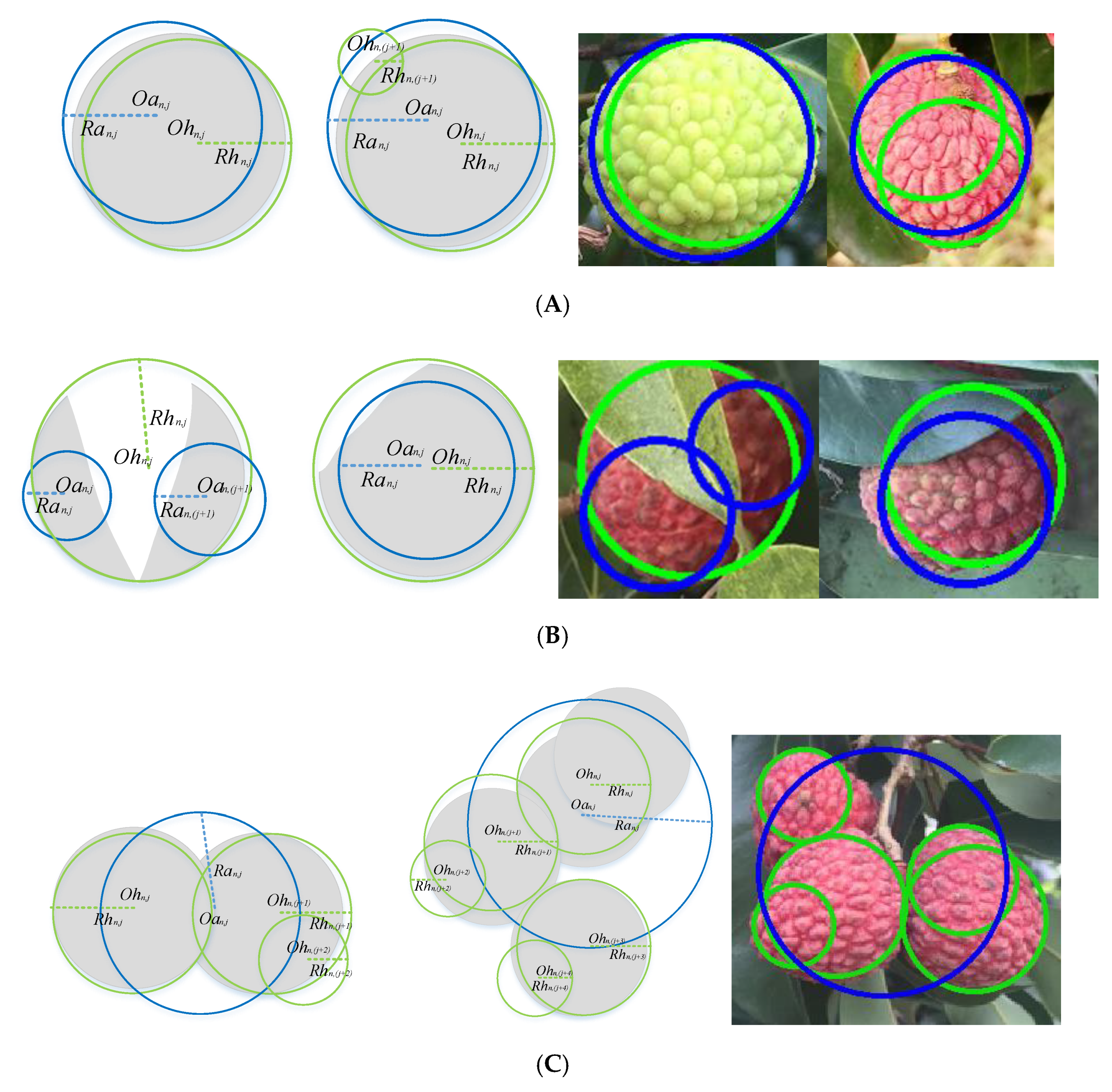
3.2.1. Distinguishing the ROIs between Isolated and Overlapped Lychee Fruits
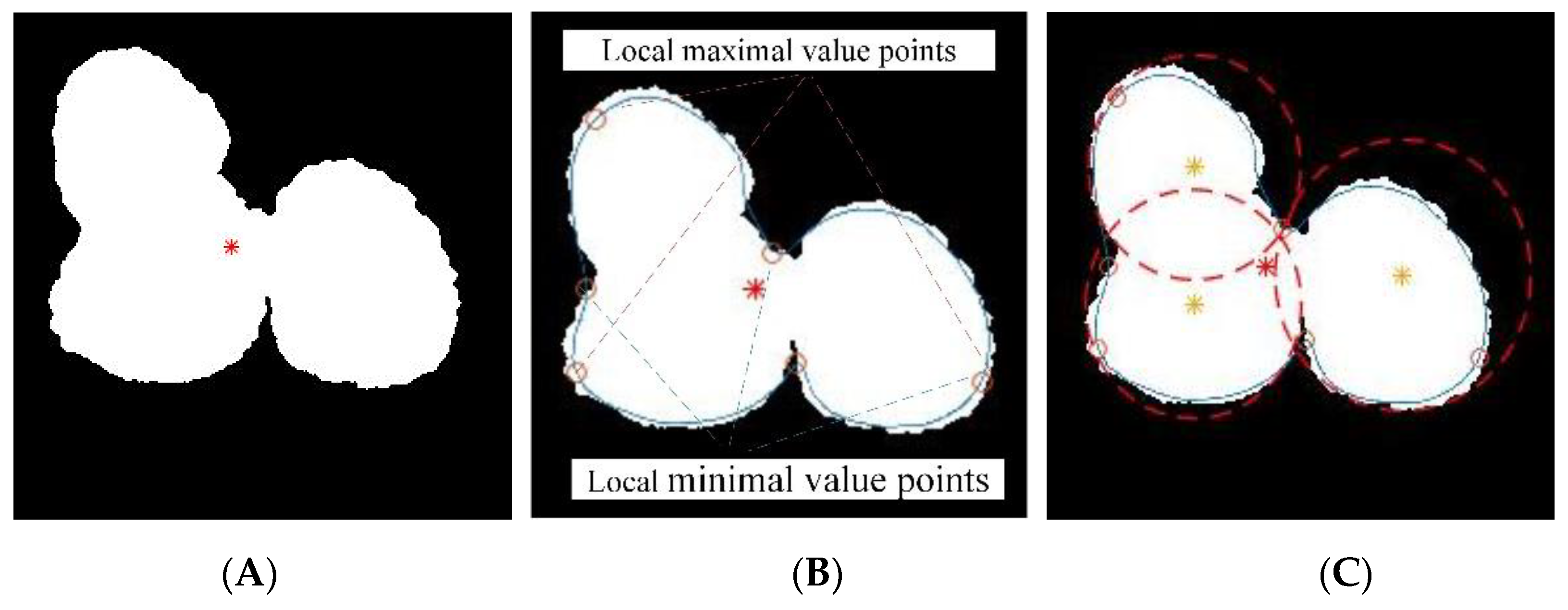
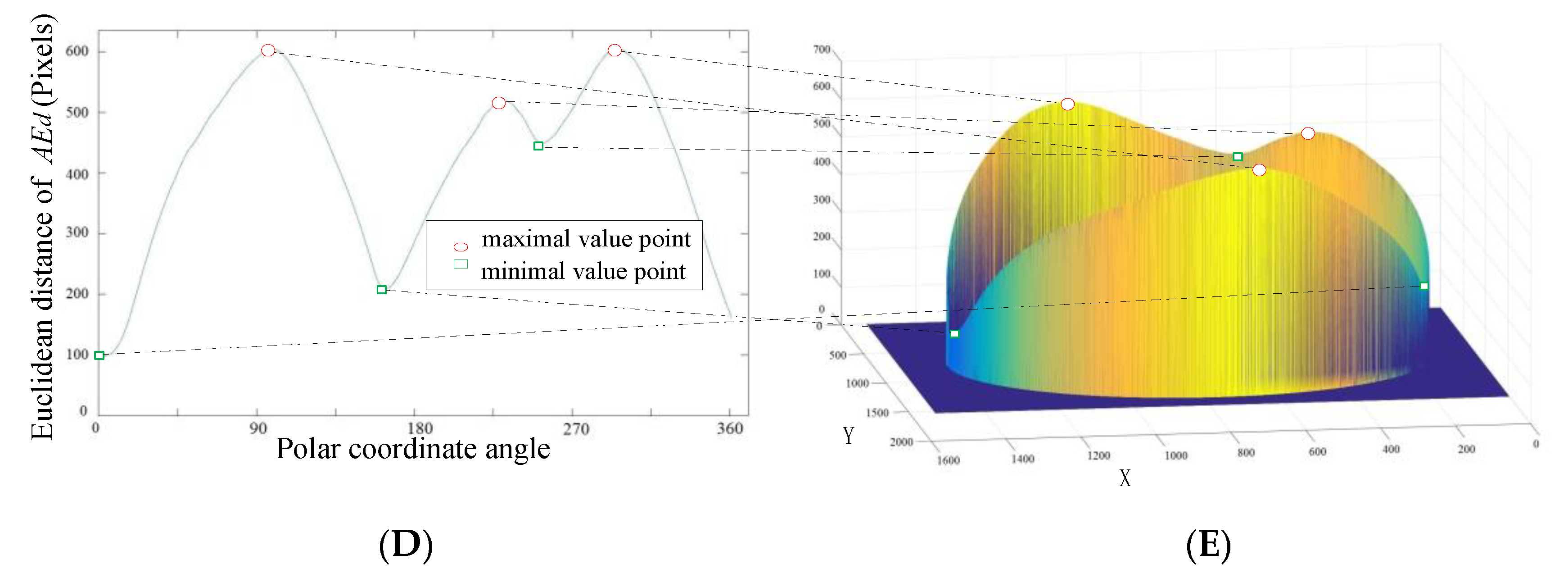
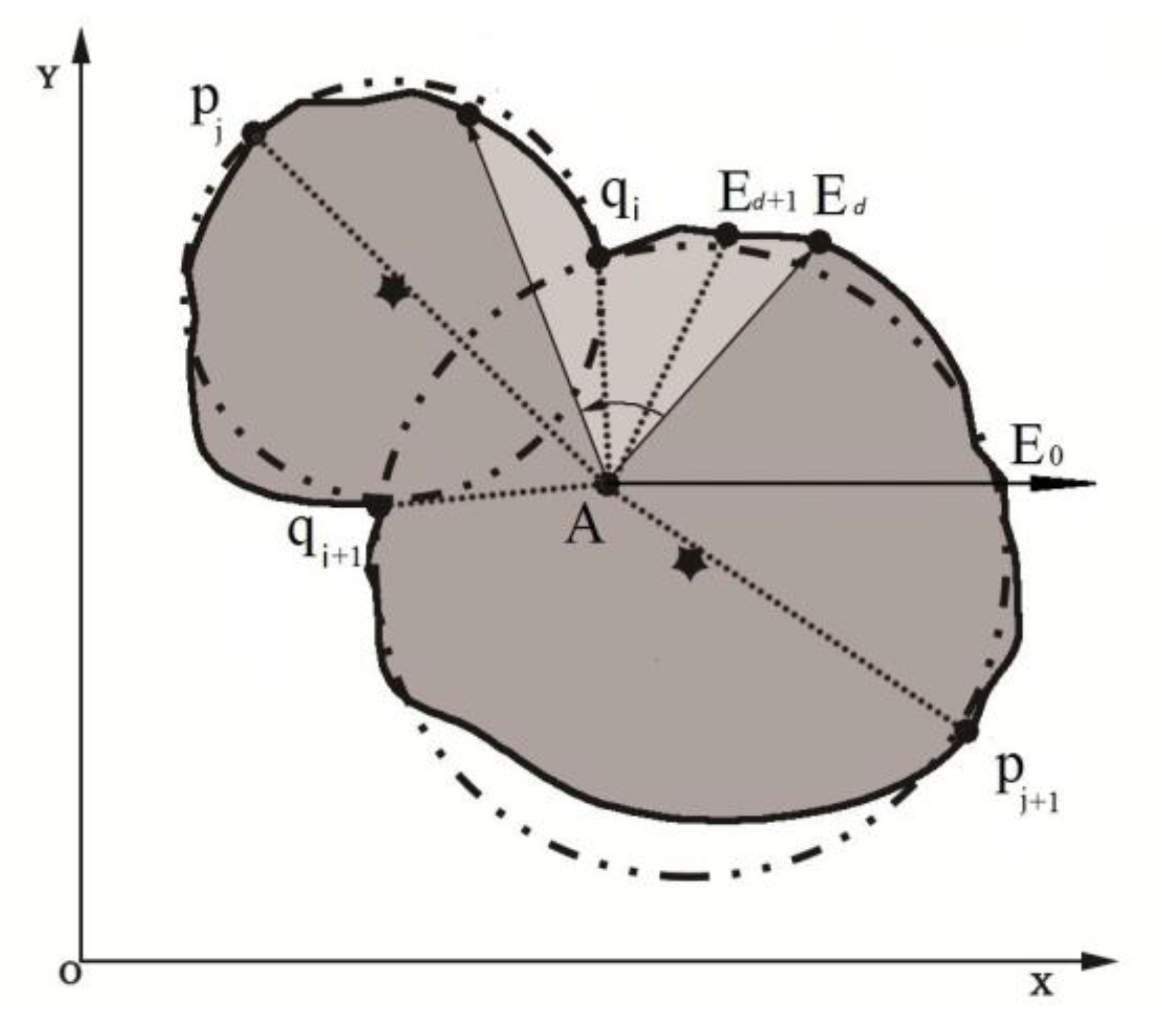
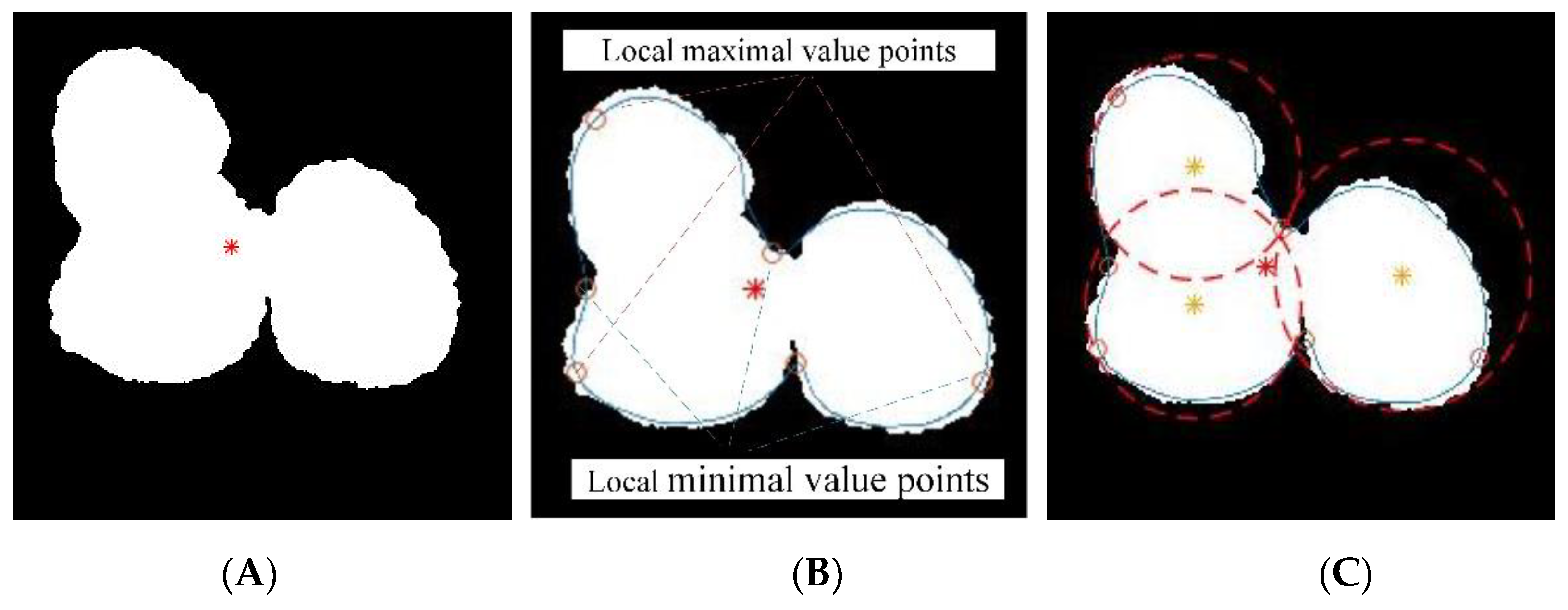
3.2.2. Individual Fruit Extraction from Overlapped Lychee Regions
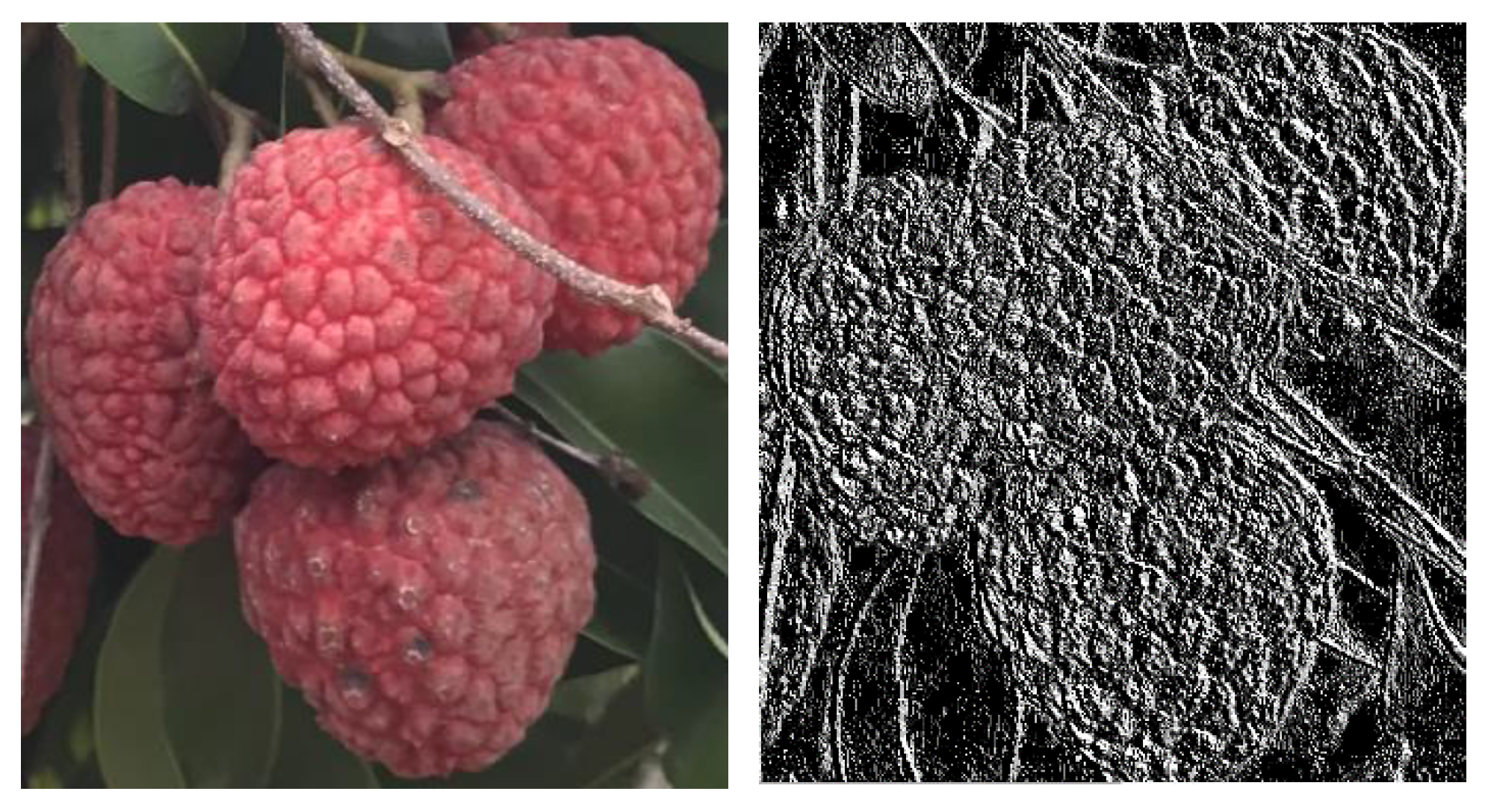
3.3. LBP-SVM Recognition of Lychee Fruit
4. Results and Discussion
4.1. Performance Evaluation under Well-Illuminated Conditions without Using LBP-SVM Classifier
4.2. Performance Evaluation under Overexposure and Weakly Illuminated Conditions without Using the LBP-SVM Classifier
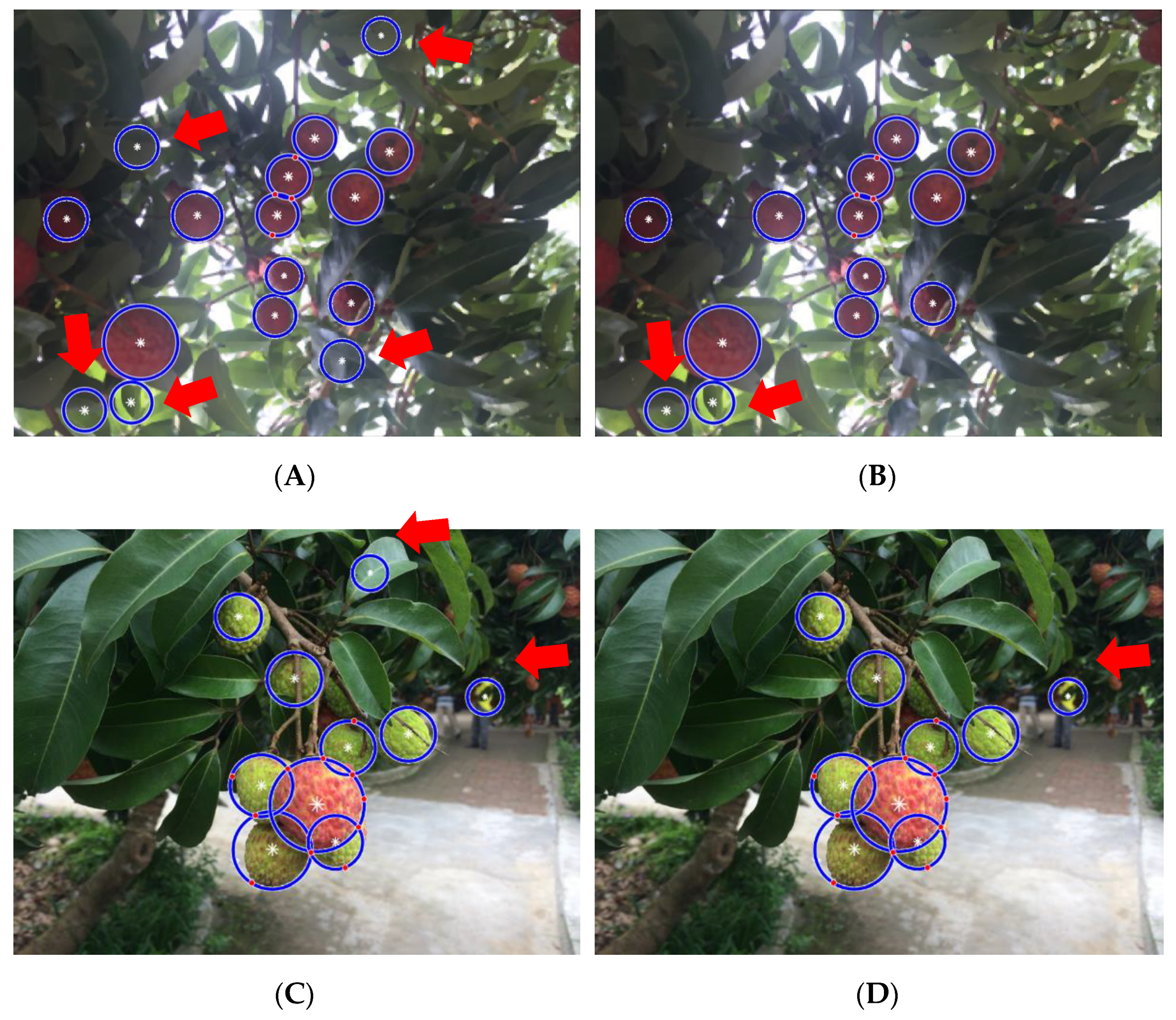
4.3. Performance Evaluation in an Orchard Environment Using the LBP-SVM Classifier
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ACHC | Equivalent foreground area circles and Hough circles |
| CLAHE | Contrast limited adaptive histogram equalization |
| HIK-SVM | Histogram intersection kernel based support vector machine |
| HSI | Hue/saturation/intensity color space |
| HSV | Hue/saturation/value color space |
| IPC | Industrial personal computer |
| LBP | Local binary pattern |
| LDA | Linear discriminant analysis |
| PCEVP | Polar coordinate extreme value projection |
| RGB | Red/green/blue color space |
| ROI | Region of interest |
| UAV | Unmanned aerial vehicle |
| UGV | Unmanned ground vehicle |
| YIQ | YIQ color space, where Y is Luminance, I is in-phase, and Q is quadrature |
| YCbCr | Luma/Blue chromaticity component/Red chromaticity component |
References
- Kong, D.; Xue, Y.; Mao, L.; Wang, K.; Chen, H.; Huang, K. Lychee image segmentation algorithm based on ant colony and space constraints FCM. Comput. Eng. Appl. 2013, 49, 1877–1893. [Google Scholar] [CrossRef]
- Guo, A.X.; Zou, X.J.; Zou, H.X. Recognition on image of lychee fruits and their main fruit bearing based on twin-threshold method. Comput. Eng. Des. 2014, 35, 557–561. [Google Scholar] [CrossRef]
- Kurtulmus, F.; Lee, W.S.; Vardar, A. Green citrus detection using ‘eigenfruit’, colour and circular gabor texture features under natural outdoor conditions. Comput. Electron. Agric. 2011, 78, 140–149. [Google Scholar] [CrossRef]
- Lü, J.; Zhao, D.; Ji, W.; Chen, Y.; Shen, H.; Zhang, Y. Fast positioning method of apple harvesting robot for oscillating fruit. Trans. Chin. Soc. Agric. Eng. 2012, 28, 48–53. [Google Scholar] [CrossRef]
- Sujay, R.N.; Deka, P.C. Support vector machine applications in the field of hydrology: A review. Appl. Soft Comput. 2014, 19, 372–386. [Google Scholar] [CrossRef]
- Liu, T.H.; Ehsani, R.; Toudeshki, A.; Zou, X.J.; Wang, H.J. Detection of citrus fruit and tree trunks in natural environments using a multi-elliptical boundary model. Comput. Ind. 2018, 99, 9–16. [Google Scholar] [CrossRef]
- Wang, D.D.; Song, H.B.; Tie, Z.H.; Zhang, W.Y.; He, D.J. Recognition and localization of occluded apples using K-means clustering algorithm and convex hull theory: A comparison. Multimed. Tools Appl. 2016, 75, 3177–3198. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; Van Henten, E.J. Stem localization of sweet-paper plants using the support wire as a visual cue. Comput. Electron. Agric. 2014, 105, 111–120. [Google Scholar] [CrossRef]
- Font, D.; Tresanchez, M.; Martínez, D.; Moreno, J.; Clotet, E.; Palacín, J. Vineyard yield estimation based on the analysis of high resolution images obtained with artificial illumination at night. Sensors 2015, 15, 8284–8301. [Google Scholar] [CrossRef]
- Wang, C.L.; Tang, Y.C.; Zou, X.J.; SiTu, W.M.; Feng, W.X. A robust fruit image segmentation algorithm against varying illumination for vision system of fruit harvesting robot. Optik 2017, 131, 626–631. [Google Scholar] [CrossRef]
- He, Z.L.; Xiong, J.T.; Lin, R.; Zou, X.; Tang, L.Y.; Yang, Z.G.; Liu, Z.; Song, G. A method of green lychee recognition in natural environment based on improved LDA classifier. Comput. Electron. Agric. 2017, 140, 159–167. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Y.H.; Song, H.B.; He, J.D. Segmentation method of overlapped double apples based on Snake model and corner detectors. Trans. Chin. Soc. Agric. Eng. 2015, 31, 196–203. [Google Scholar] [CrossRef]
- Xiang, R.; Jiang, H.Y.; Ying, Y.B. Recognition of clustered tomatoes based on binocular stereo vision. Comput. Electron. Agric. 2014, 106, 75–90. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, D.; Jia, W.; Ruan, C.; Tang, S.; Shen, T. A method of segmenting apples at night based on colour and position information. Comput. Electron. Agric. 2016, 122 (Suppl. C), 118–123. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vandevoorde, K.; Wouters, N.; Kayacan, E.; De Baerdemaeker, J.G.; Saeys, W. Detection of red and bicoloured apples on tree with an RGB-D camera. Biosyst. Eng. 2016, 146, 33–44. [Google Scholar] [CrossRef]
- Chen, S.W.; Shivakumar, S.S.; Dcunha, S.; Das, J.; Okon, E.; Qu, C.; Taylor, C.J.; Kumar, V. Counting apples and oranges with deep learning: A data-driven approach. IEEE Rotot. Autom. Lett. 2017, 2, 781–788. [Google Scholar] [CrossRef]
- Zhuang, J.J.; Luo, S.M.; Hou, C.J.; Tang, Y.; He, Y.; Xue, X.Y. Detection of orchard citrus using a monocular machine vision-based method for automatic fruit picking applications. Comput. Electron. Agric. 2018, 152, 64–73. [Google Scholar] [CrossRef]
- Xiong, J.T.; He, Z.L.; Lin, R.; Liu, Z.; Bu, R.B.; Yang, Z.G.; Peng, H.X. Visual positioning technology of picking robots for dynamic lychee clusters with disturbance. Comput. Electron. Agric. 2018, 151, 226–237. [Google Scholar] [CrossRef]
- Suchet, B.; James, U. Image Segmentation for Fruit Detection and Yield Estimation in Apple Orchard. J. Field Robot. 2017, 1039–1060. [Google Scholar] [CrossRef]
- Senthilnath, J.; Dokania, A.; Kandukuri, M.; Ramesh, K.N.; Anand, G.; Omkar, S.N. Detection of tomatoes using spectral-spatial methods in remotely sensed RGB images captured by UAV. Biosyst. Eng. 2016, 146, 16–32. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast Limited Adaptive Histograph Equalization. In Graphic Gems IV; Academic Press Professional: San Diego, CA, USA, 1994; pp. 474–485. [Google Scholar] [CrossRef]
- Ji, W.; Tao, Y.; Zhao, D.; Yang, J.; Ding, S. Iterative Threshold Segmentation of Apple Branch Images Based on CLAHE. Trans. Chin. Soc. Agric. Mach. 2014, 45, 69–75. [Google Scholar] [CrossRef]
- Xiong, J.T.; Zou, X.; Chen, L.; Guo, A. Recognition of mature lychee in natural environment based on machine vision. Trans. CSAM 2011, 42, 162–166. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Luo, L.; Zou, X.; Yang, Z.; Li, G.; Song, X.; Zhang, C. Grape image fast segmentation based on improved artificial bee colony and fuzzy clustering. Trans. CSAM 2015, 46, 23–28. [Google Scholar] [CrossRef]
- Fu, L.S.; Wang, B.; Cui, Y.J.; Su, S.; Gejima, Y.; Kobayashi, T. Kiwifruit recognition at night-time using artificial lighting based on machine vision. Int. J. Agric. Biol. Eng. 2015, 8, 52–59. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Vapnik, V.N.; Chervonenkis, A.Y. On the Uniform Conver Gence of Relative Frequencies of Events to Their Probabilities. In Measures of Complexity; Springer: Cham, Switzerland, 2015; pp. 11–30. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Contrast Enhancement Limit | The Number of Blocks | ||||
|---|---|---|---|---|---|
| 5 × 5 | 8 × 8 | 10 × 10 | 12 × 12 | 15 × 15 | |
| 0.005 | 78% | 79% | 80% | 80% | 77% |
| 0.01 | 78% | 81% | 83% | 80% | 78% |
| 0.015 | 79% | 84% | 86% | 82% | 80% |
| 0.02 | 79% | 81% | 85% | 82% | 82% |
| 0.025 | 78% | 79% | 82% | 80% | 81% |
| Method | Test Dataset | Average Detection Time (s) | Total Lychee Fruits | TP | FN | FP | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|---|---|---|---|---|
| A | A1 | 1.081 | 702 | 623 | 79 | 151 | 80.49 | 88.75 | 84.42 |
| A | B1 | 0.994 | 213 | 190 | 23 | 50 | 79.17 | 89.20 | 83.89 |
| B | A1 | 0.745 | 702 | 611 | 91 | 177 | 77.54 | 87.04 | 82.01 |
| C | A1 | 0.821 | 702 | 653 | 49 | 302 | 68.38 | 93.02 | 78.82 |
| D | A1 | 0.654 | 702 | 564 | 138 | 162 | 77.69 | 80.34 | 78.99 |
| Method | Illumination State | Average Detection Time (s) | Total Lychee Fruits | TP | FN | FP | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|---|---|---|---|---|
| A | Weak | 1.226 | 634 | 540 | 94 | 126 | 81.08 | 85.17 | 83.08 |
| A | Overexposure | 1.261 | 268 | 227 | 41 | 67 | 77.21 | 84.70 | 80.78 |
| A | Weak and overexposure | 1.242 | 902 | 767 | 135 | 193 | 79.90 | 85.03 | 82.38 |
| Illumination Conditions | Average Detection Time (s) | Lychee Fruits | TP | FN | FP | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|---|---|---|---|
| Weak | 1.42 | 634 | 540 | 94 | 80 | 87.10 | 85.17 | 86.12 |
| Overexposure | 1.42 | 268 | 227 | 41 | 38 | 85.66 | 84.70 | 85.18 |
| Well | 1.38 | 702 | 623 | 79 | 81 | 88.49 | 88.75 | 88.62 |
| Comprehensive | 1.41 | 1604 | 1390 | 214 | 199 | 87.48 | 86.66 | 87.07 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Chen, Y.; Tang, Y.; Zhuang, J.; He, Y.; Hou, C.; Chu, X.; Zhong, Z.; Luo, S. Lychee Fruit Detection Based on Monocular Machine Vision in Orchard Environment. Sensors 2019, 19, 4091. https://doi.org/10.3390/s19194091
Guo Q, Chen Y, Tang Y, Zhuang J, He Y, Hou C, Chu X, Zhong Z, Luo S. Lychee Fruit Detection Based on Monocular Machine Vision in Orchard Environment. Sensors. 2019; 19(19):4091. https://doi.org/10.3390/s19194091
Chicago/Turabian StyleGuo, Qiwei, Yayong Chen, Yu Tang, Jiajun Zhuang, Yong He, Chaojun Hou, Xuan Chu, Zhenyu Zhong, and Shaoming Luo. 2019. "Lychee Fruit Detection Based on Monocular Machine Vision in Orchard Environment" Sensors 19, no. 19: 4091. https://doi.org/10.3390/s19194091
APA StyleGuo, Q., Chen, Y., Tang, Y., Zhuang, J., He, Y., Hou, C., Chu, X., Zhong, Z., & Luo, S. (2019). Lychee Fruit Detection Based on Monocular Machine Vision in Orchard Environment. Sensors, 19(19), 4091. https://doi.org/10.3390/s19194091