Sea–Sky Line and Its Nearby Ships Detection Based on the Motion Attitude of Visible Light Sensors

Abstract
1. Introduction
2. Related Work
2.1. SSL Detection
2.2. Background Removal
2.3. Foreground Segmentation
3. Camera Six-Degrees-of-Freedom Motion Attitude Modeling
3.1. Influence of Camera Swaying, Surging, and Yawing Motions on the Position of the SSL
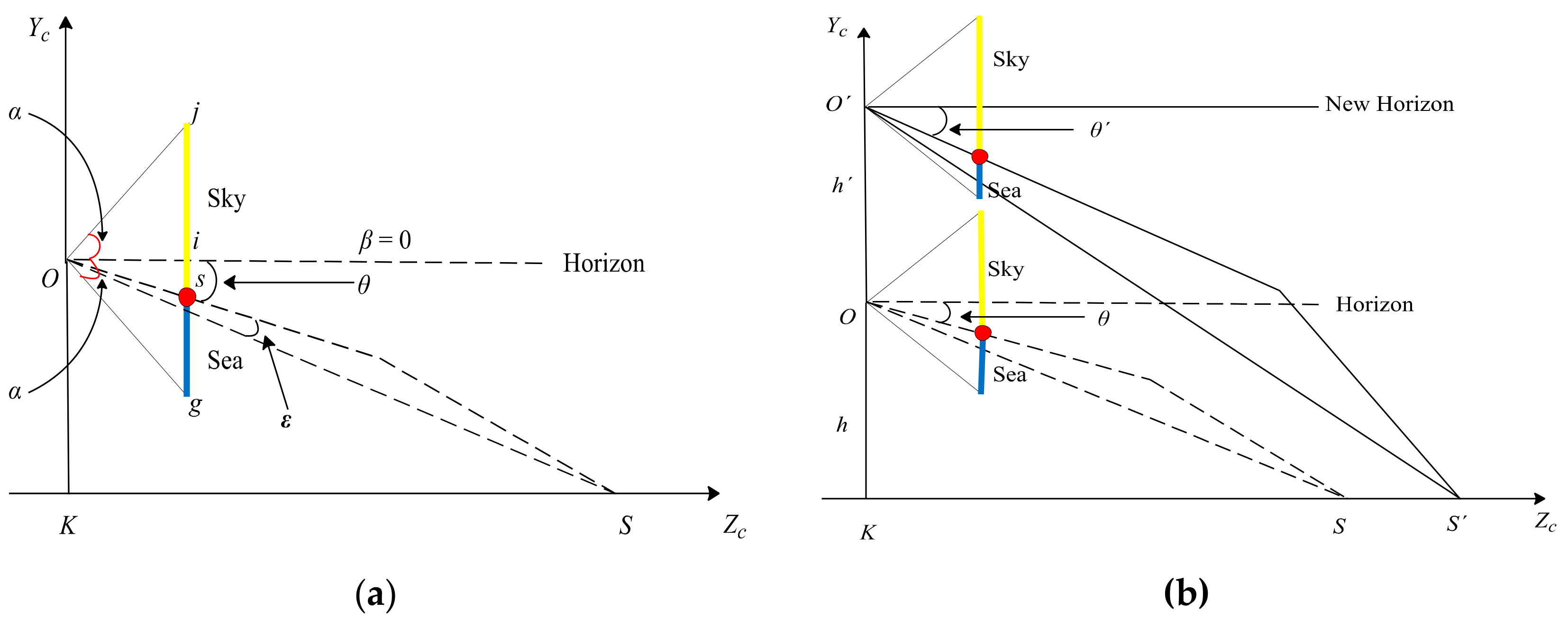
3.2. Influence of Camera Heaving and Pitching Motions on the Position of the SSL
3.2.1. Influence of Camera Heaving Motion
3.2.2. Influence of Camera Pitching Motion
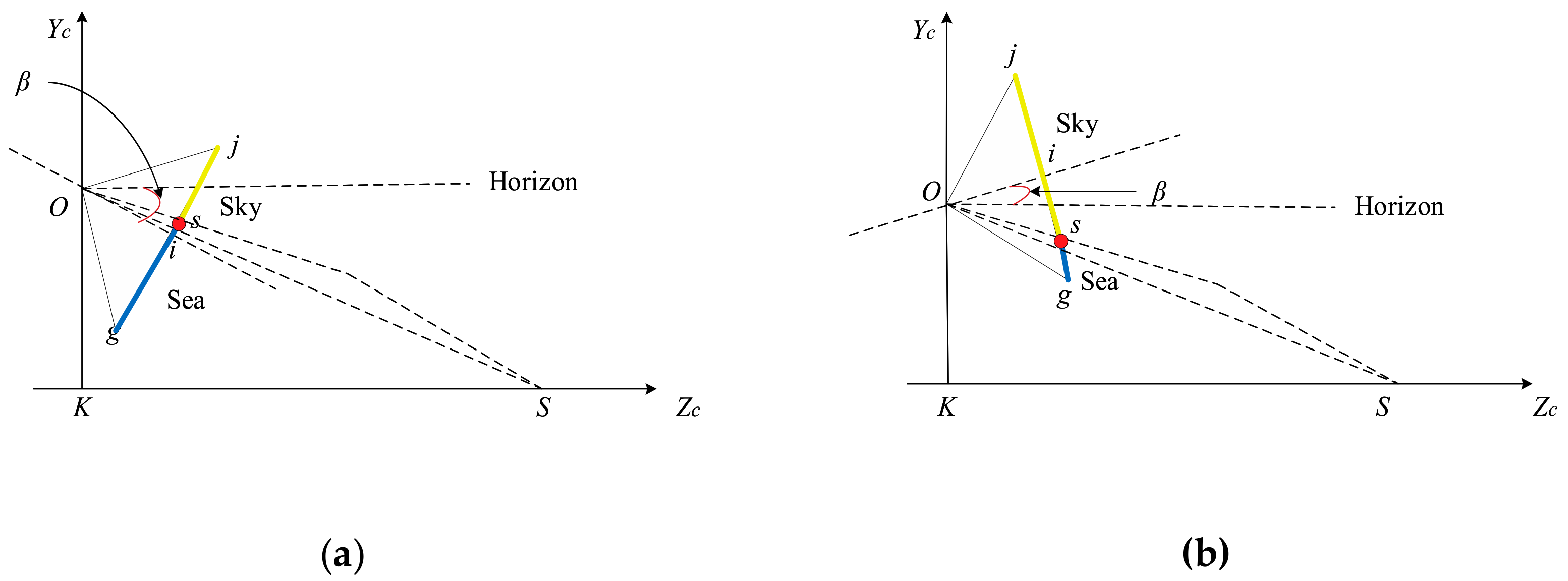
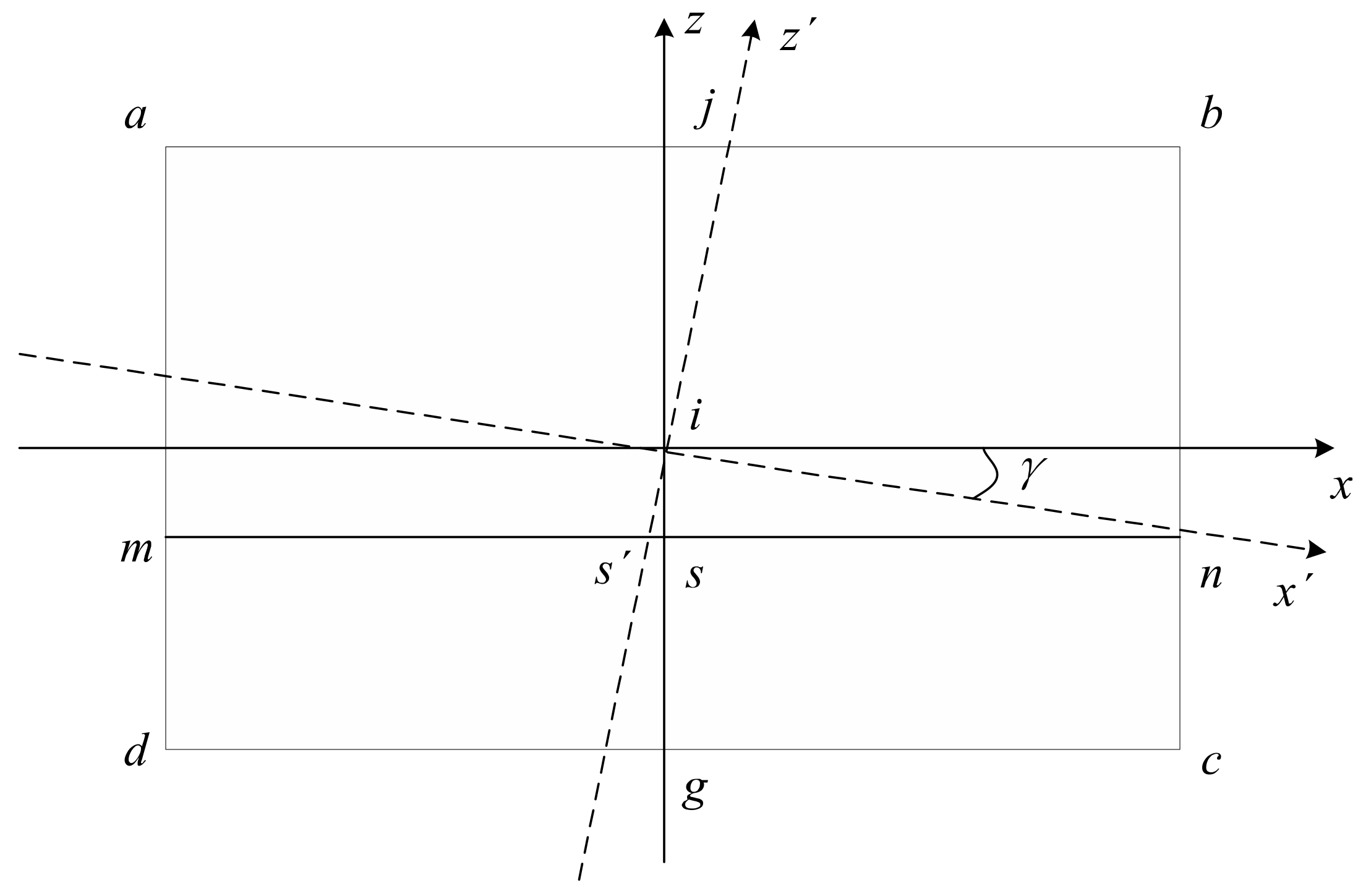
3.3. Influence of Camera Rolling Motion on the Position of the SSL
4. Edge Detection and Hough Transform Algorithm for the Detection of the SSL
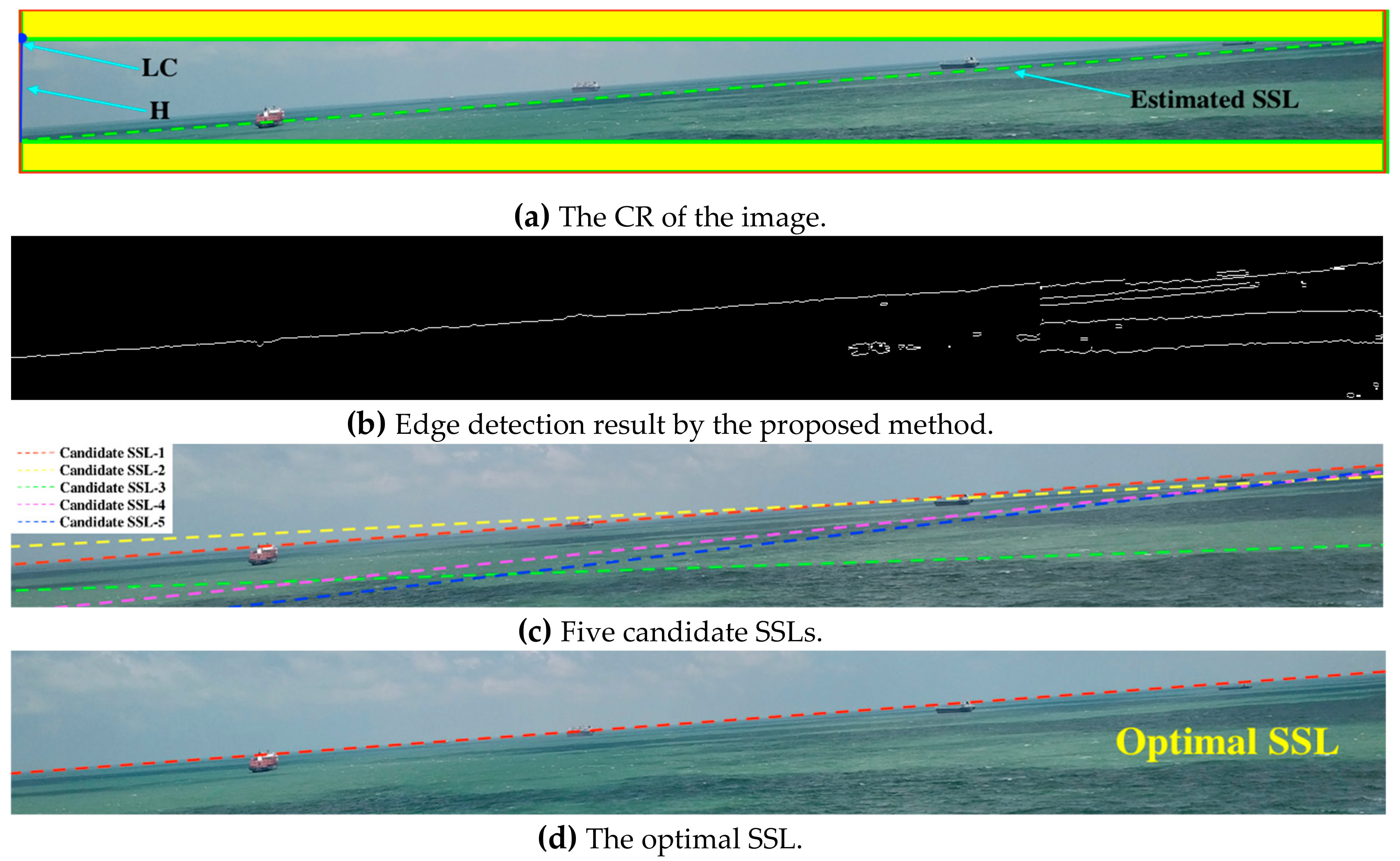
4.1. Estimating the CR of the SSL
4.2. Edge Detection in the CR
- Preprocessing. The CR is grayscaled and smoothed with median filtering to filter out noise. Median filtering is often used to remove salt and pepper noise, which has a good smoothing effect on the sea surface reflected by strong light, and can maximize edge information.
- Obtaining a binary map by the local Otsu algorithm. According to the gray information of the CR, the Otsu algorithm automatically selects the threshold that maximizes the variance between the two types of pixel as the optimal threshold. For the whole sea–sky image, besides the sea and the sky, there are many other types of pixels, such as clouds, waves, and strong light reflections. It is difficult to obtain an accurate global threshold for the whole image by Otsu algorithm, and the image segmentation accuracy is poor. In this paper, the CR after median filtering is processed into N adjacent image blocks. The pixel distribution of the sky and the sea region in most image blocks has significant differences. Then, the Otsu algorithm is applied to each image block to obtain a local binary image, and finally the binarized image blocks are spliced back to the CR.
- Edge extraction. For the binary image of the CR, we check the position of the pixel mutation in the vertical direction line-by-line, and the position of the pixel mutation is the edge of the binary image, as shown in Equation (13), where () represents the edge image, () represents the binary image, represents the position along any line of pixels, and represents the morphological XOR operation. The edge extraction effect is shown in Figure 7b.
4.3. Identifying the Optimal SSL with Improved Hough Transform
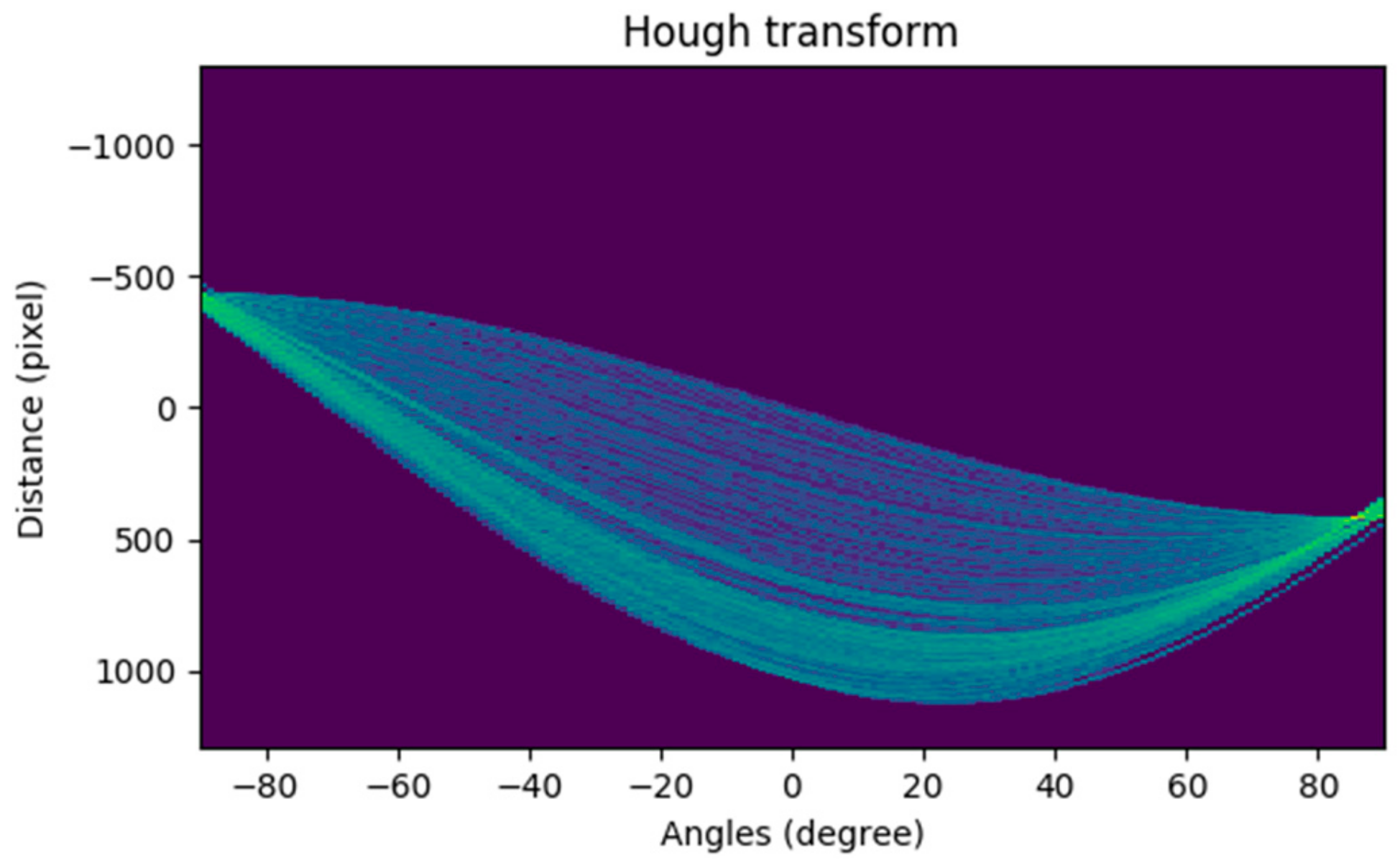
- Prediction of SSL using Hough transform. In order to avoid the sample dispersion problem caused by the excessive voting range of the accumulator, we use the Kernel-based Hough transform [34] algorithm to smooth the accumulator. First, we calculate five clusters of pixel points with collinear features, and then find the best fitting line and model the uncertainty for each cluster, and last, vote for the main lines using elliptical-Gaussian kernels computed from the lines associated uncertainties. We obtain the following parameters using Figure 7b processed by Hough transform, as shown in Table 1. In order to present five SSLs visually, we use five colors to mark them in the original image, as show in Figure 7c.
- Measurement results with the inertial sensor. In an ideal state, the roll angle obtained by the inertial sensor is the tilt angle of the SSL, and there is a mutual residual between and . Therefore, we can take into the Hough space to find the SSL. However, there is a certain measurement error in the inertial sensor data, so it is necessary to comprehensively consider the prediction result of Hough transform and the measurement result of inertial sensor.
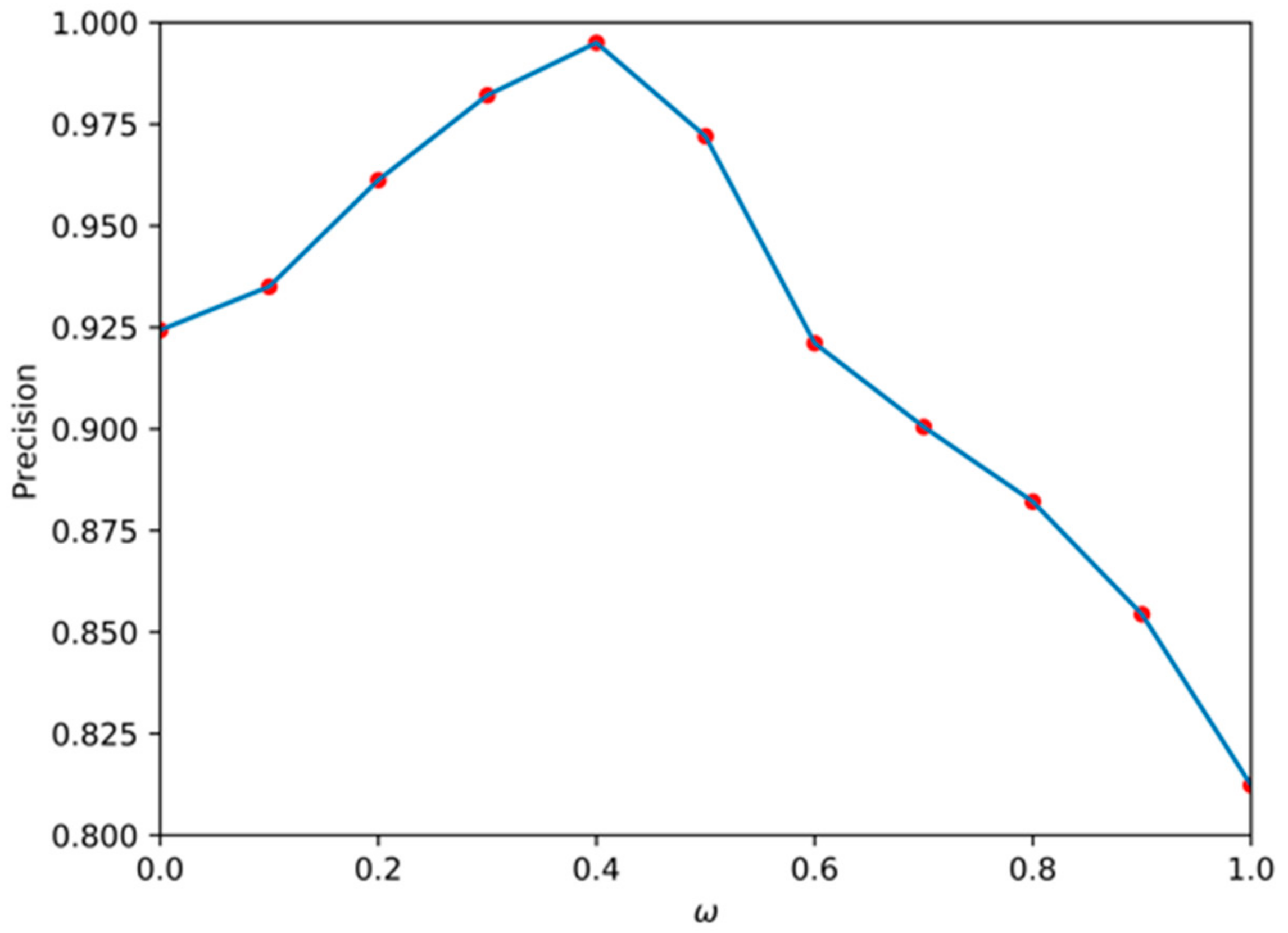
- Defining cost function. Firstly, we use and to represent the prediction of length and angle, and represent the measurement of length and angle, and (1 −) represent the influence factors of length and angle, respectively. The cost function can be obtained from Equation (14). Then, we need to eliminate the effect of the angle’s direction on the cost function. If , we need to remove the SSL with a negative angle in the predicted value; the processing method is the same if . Finally, in order to eliminate the dimensional influence between the evaluation metrics, the min–max normalization processing method is used to map the result values between [0, 1], and the conversion function is shown in Equation (15).
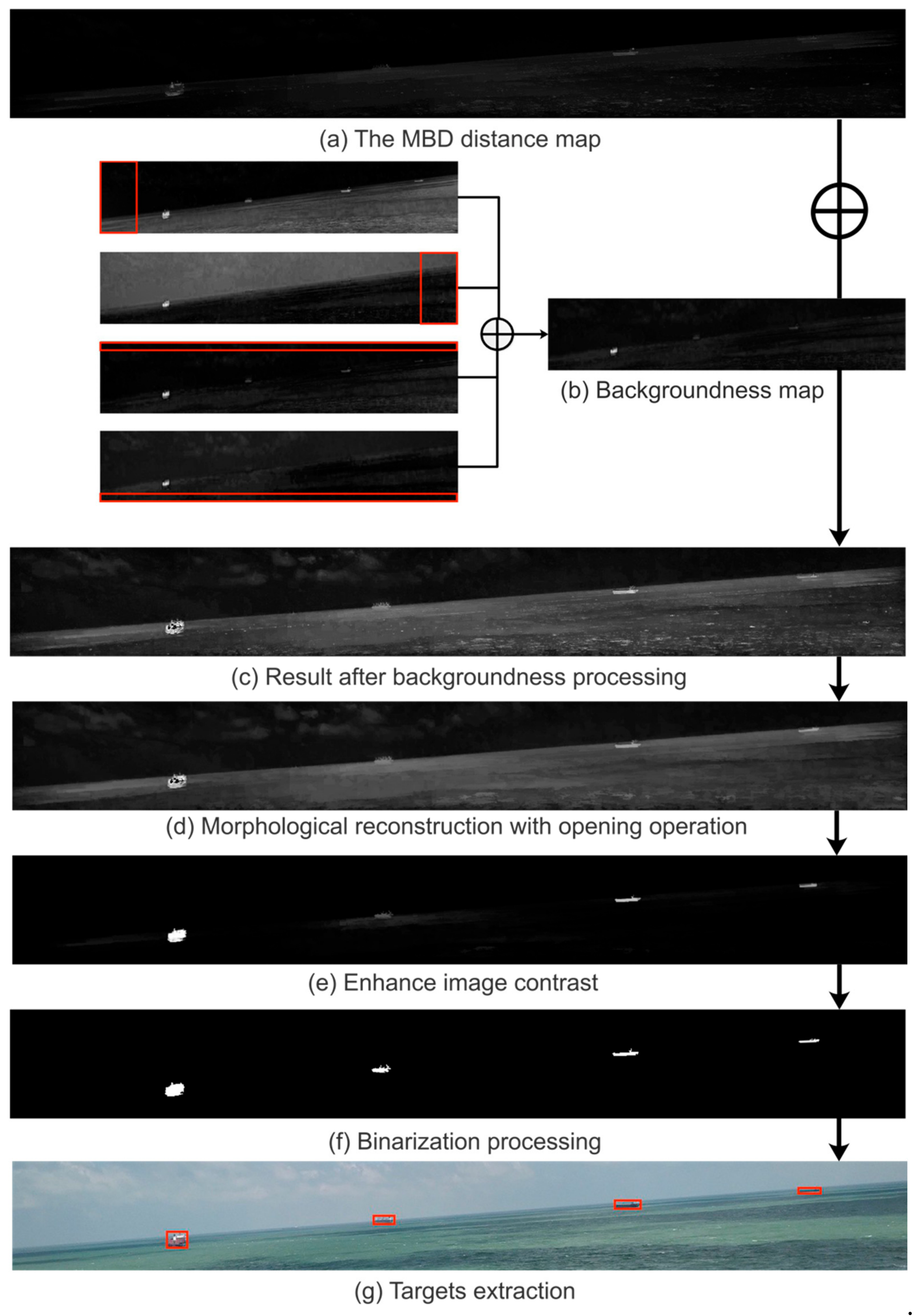
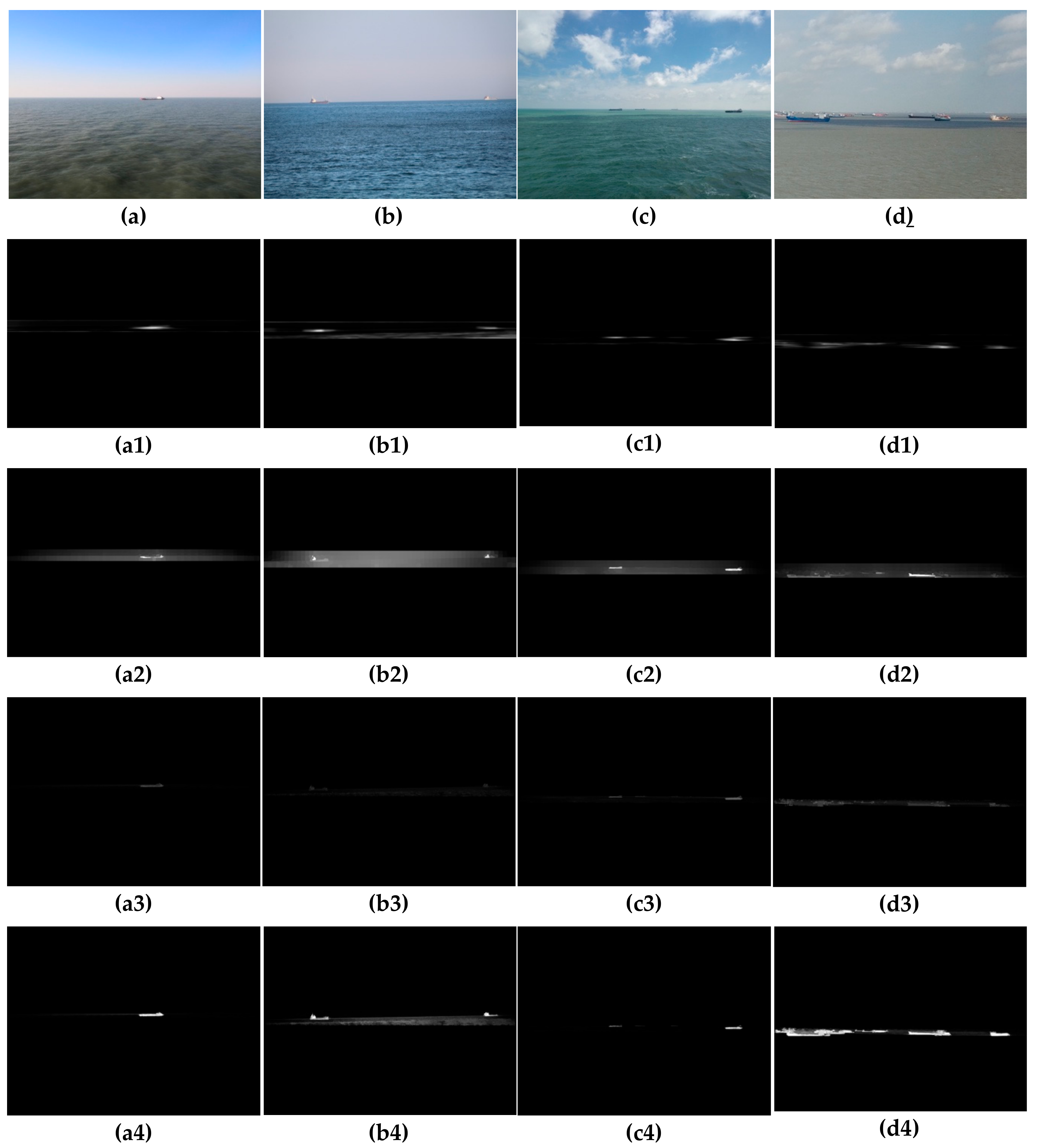
5. Visual Saliency Detection in the ROSD of the SSL
6. Experimental Results and Discussion
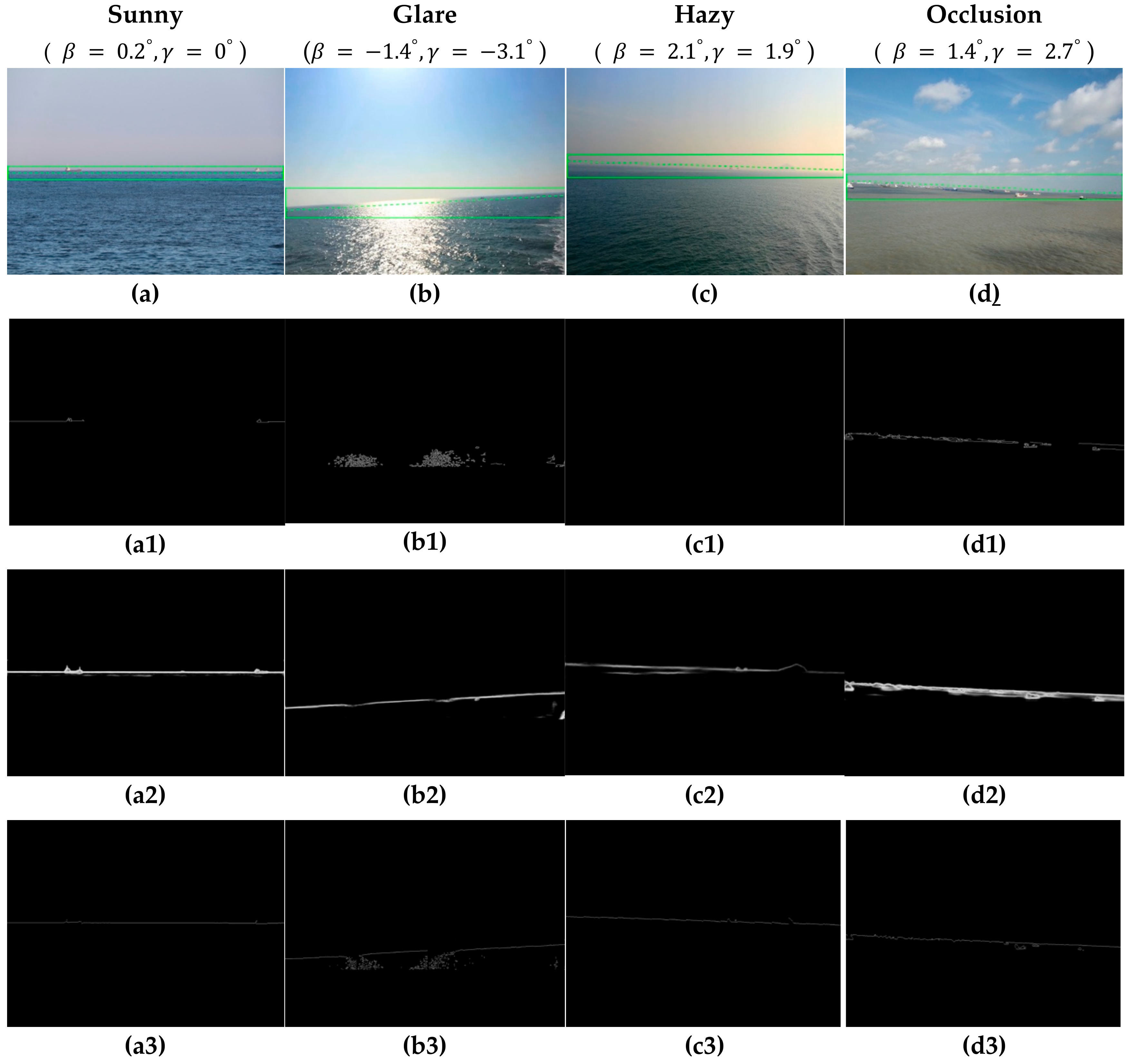
6.1. Dataset and Evaluation Indicators
6.1.1. Dataset
6.1.2. Evaluation Metrics
6.2. Experimental Results and Discussion on SSL Detection
- 1
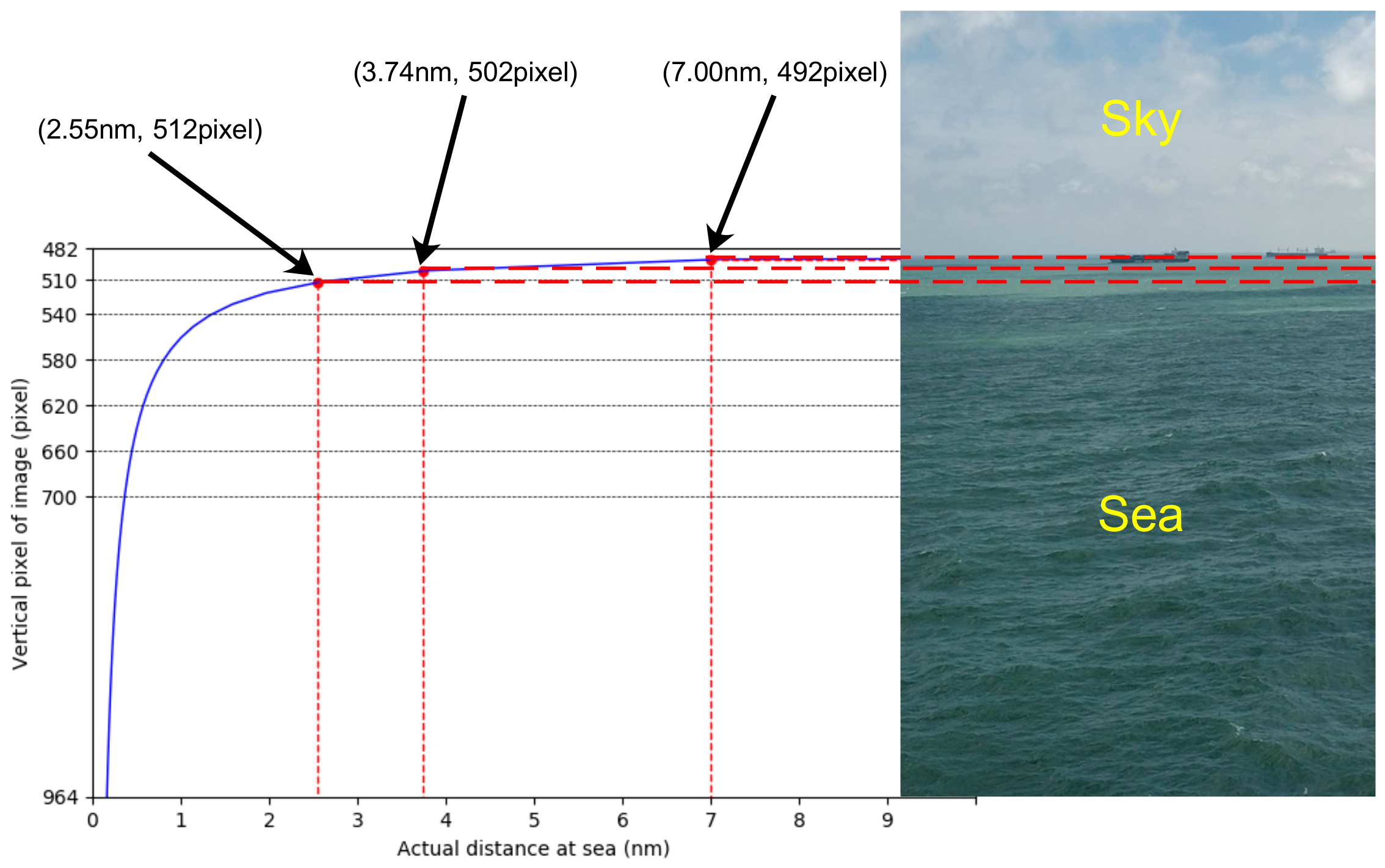
- Experiment 1—Verification of the camera motion attitude model
- 2
- Experiment 2—Verification of the improved edge detection model
- 3
- Experiment 3—Verification of the improved Hough transform model
6.3. Experimental Results of Ship Detection in the Train Set
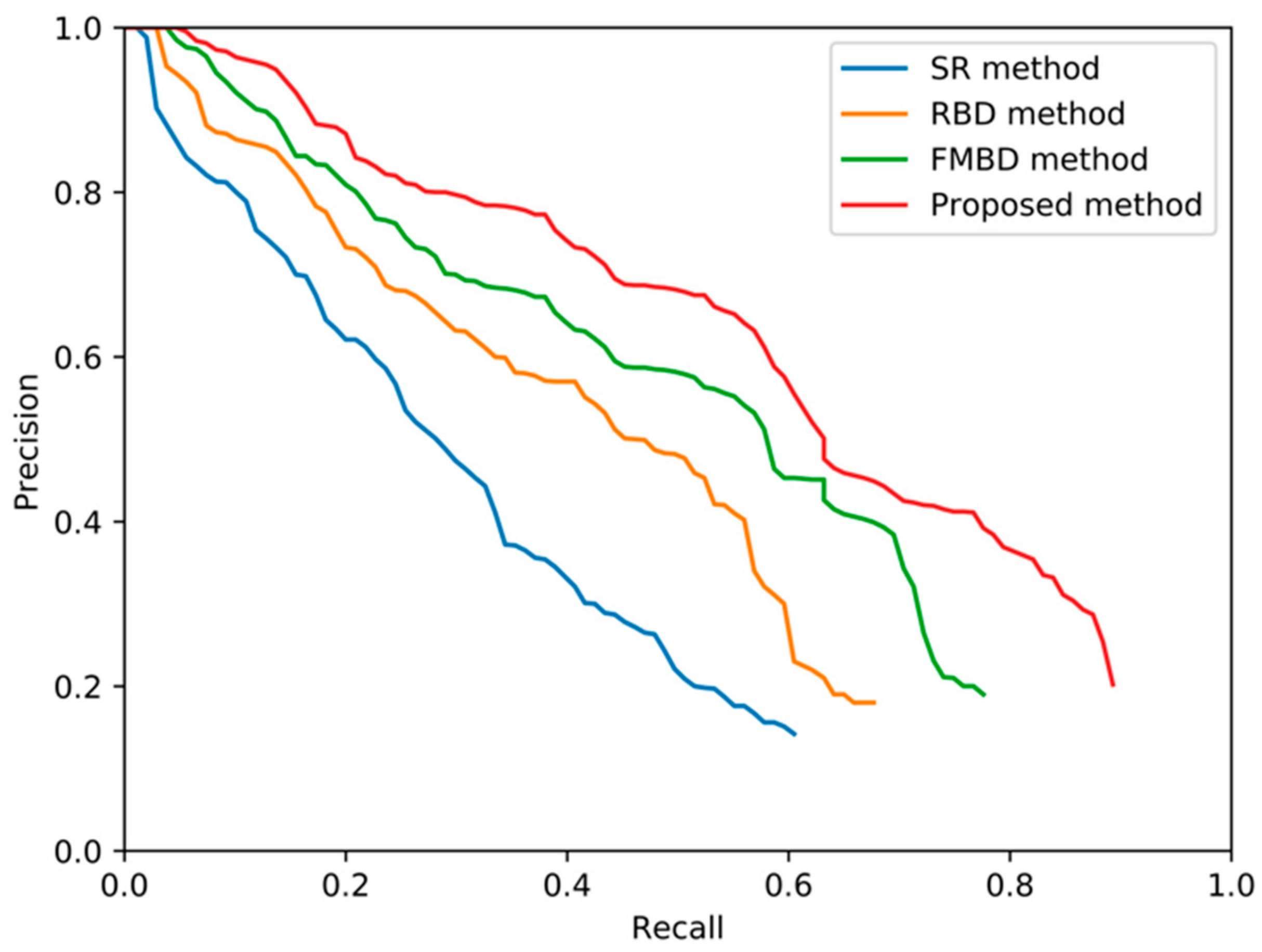
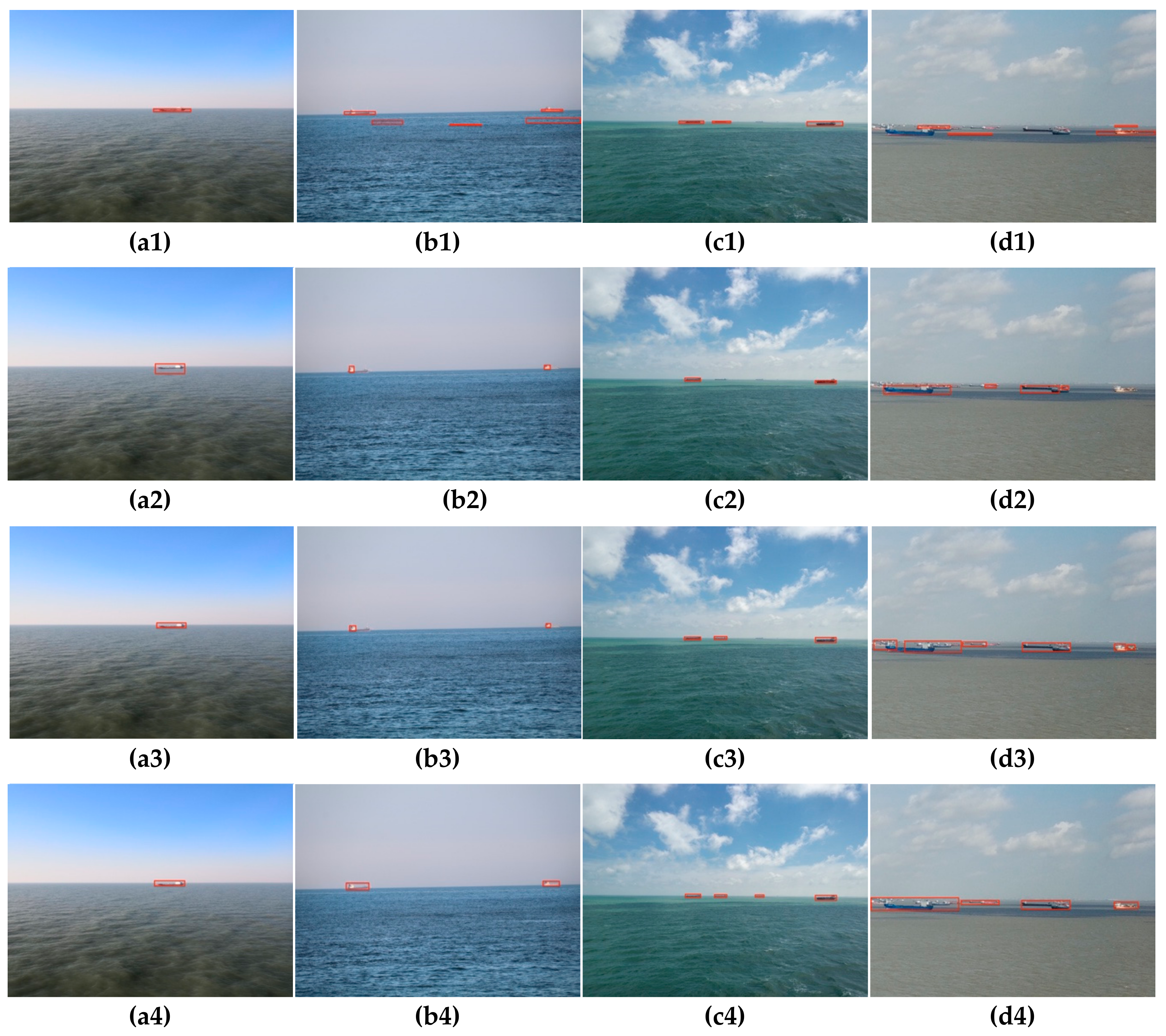
6.4. Experimental Results of Ship Detection in the Test Set
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Porathe, T.; Prison, J.; Yemao, M. Situation awareness in remote control centers for unmanned ships. In Proceedings of the Human Factors in Ship Design & Operation, London, UK, 26–27 February 2014; pp. 93–101. [Google Scholar]
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Video Processing from Electro-Optical Sensors for Object Detection and Tracking in a Maritime Environment: A Survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef]
- Yuxing, D.; Weining, L. Detection of sea-sky line in complicated background on grey characteristics. Chin. J. Opt. Appl. Opt. 2010, 3, 253–256. [Google Scholar]
- Liu, W. Research on the Method of Electronic Image Stabilization for Shipborne Mobile Video; Dalian Maritime University: Dalian, China, 2017; pp. 96–101. [Google Scholar]
- Wang, B.; Su, Y.; Wan, L. A Sea-Sky Line Detection Method for Unmanned Surface Vehicles Based on Gradient Saliency. Sensors 2016, 16, 543. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J. Small infrared target detection by region-adaptive clutter rejection for sea-based infrared search and track. Sensors 2014, 14, 13210–13242. [Google Scholar] [CrossRef] [PubMed]
- Fefilatyev, S.; Goldgof, D.; Shreve, M. Detection and tracking of ships in open sea with rapidly moving buoy-mounted camera system. Ocean Eng. 2012, 54, 1–12. [Google Scholar] [CrossRef]
- Santhalia, G.K.; Sharma, N.; Singh, S. A Method to Extract Future Warships in Complex Sea-sky background which May Be Virtually Invisible. In Proceedings of the Third Asia International Conference on Modelling & Simulation, Bali, Indonesia, 25–29 May 2009; pp. 533–539. [Google Scholar]
- Yongshou, D.; Bowen, L.; Ligang, L.; Jiucai, J.; Weifeng, S.; Feng, S. Sea-sky-line detection based on local Otsu segmentation and Hough transform. Opto Electron. Eng. 2018, 45, 180039. [Google Scholar]
- Zhang, Y.; Li, Q.Z.; Zang, F.N. Ship detection for visual maritime surveillance from non-stationary platforms. Ocean Eng. 2017, 141, 53–63. [Google Scholar] [CrossRef]
- Zeng, W.J.; Wan, L.; Zhang, T.D.; Xu, Y.R. Fast Detection of Sea Line Based on the Visible Characteristics of MaritneImages. Acta Optica Sinica. 2012, 32, 01110011–01110018. [Google Scholar]
- Boroujeni, N.S.; Etemad, S.; Ali, W.A. Robust horizon detection using segmentation for UAV applications. In Proceedings of the 2012 9th Conference on Computer and Robot Vision, Toronto, ON, Canada, 28–30 May 2012; pp. 28–30. [Google Scholar]
- Kim, S. High-Speed Incoming Infrared Target Detection by Fusion of Spatial and Temporal Detectors. Sensors 2015, 15, 7267–7293. [Google Scholar] [CrossRef]
- Zeng, W.J.; Wan, L.; Zhang, T.D.; Xu, Y.R. Fast detection of weak targets in complex sea-sky background. Opt. Precis. Eng. 2012, 20, 403–412. [Google Scholar] [CrossRef]
- Fang, J.; Feng, S.; Feng, Y. Image algorithm of ship detection for surface vehicle. Trans. Beijing Inst. Technol. 2017, 37, 1235–1240. [Google Scholar]
- Lou, J.; Zhu, W.; Wang, H.; Ren, M. Small Target Detection Combining Regional Stability and Saliency in a Color Image. Multimed. Tools Appl. 2017, 76, 14781–14798. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Doulamis, A.; Doulamis, N.; Georgopoulos, A. Multi-sensor target detection and tracking system for sea ground borders surveillance. In Proceedings of the 7th International Conference on PErvasive Technologies Related to Assistive Environments, Rhodes, Greece, 27–30 May 2014. [Google Scholar]
- Liu, Z.; Zhou, F.; Bai, X.; Yu, X. Automatic detection of ship target and motion direction in visual images. Int. J. Electron. 2013, 100, 94–111. [Google Scholar] [CrossRef]
- Ebadi, S.E.; Ones, V.G.; Izquierdo, E. Efficient background subtraction with low-rank and sparse matrix decomposition. In Proceedings of the 2015 IEEE International Conference on Image Processing, Quebec City, QC, Canada, 27–30 September 2015. [Google Scholar]
- Westall, P.; Ford, J.J.; O’Shea, P.; Hrabar, S. Evaluation of maritime vision techniques for aerial search of humans in maritime environments. In Proceedings of the Digital Image Computing: Techniques and Applications, Canberra, Australia, 1–3 Decemcer 2008; pp. 176–183. [Google Scholar]
- Fefilatyev, S. Algorithms for Visual Maritime Surveillance with Rapidly Moving Camera. Ph.D. Thesis, University of South Florida, Tampa, FL, USA, 2012. [Google Scholar]
- Kumar, S.S.; Selvi, M.U. Sea objects detection using color and texture classification. Int. J. Comput. Appl. Eng. Sci. 2011, 1, 59–63. [Google Scholar]
- Selvi, M.U.; Kumar, S.S. Sea object detection using shape and hybrid color texture classification. In Trends in Computer Science, Engineering and Information Technology; Springer: Berlin/Heidelberg, Germany, 2011; pp. 19–31. [Google Scholar]
- Frost, D.; Tapamo, J.R. Detection and tracking of moving objects in a maritime environment using level set with shape priors. J. Image Video Process. 2013, 2013, 42. [Google Scholar] [CrossRef]
- Loomans, M.; de With, P.; Wijnhoven, R. Robust automatic ship tracking in harbors using active cameras. In Proceedings of the 20th IEEE International Conference on Image Processing, Melbourne, Australia, 15–18 September 2013; pp. 4117–4121. [Google Scholar]
- Ren, Y.; Zhu, C.; Xiao, S. Small Object Detection in Optical Remote Sensing Images via Modified Faster R-CNN. Appl. Sci. 2018, 8, 813. [Google Scholar] [CrossRef]
- Yang, X.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks. Remote Sens. 2018, 10, 132. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, J.; Zhang, K.; Feng, C.; Zhang, J. S-CNN-based ship detection from high-resolution remote sensing images. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 18 July 2016; pp. 423–430. [Google Scholar]
- Biondi, F. Low-Rank Plus Sparse Decomposition and Localized Radon Transform for Ship-Wake Detection in Synthetic Aperture Radar Images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 117–121. [Google Scholar] [CrossRef]
- Graziano, M.D.; Grasso, M.; D’Errico, M. Performance Analysis of Ship Wake Detection on Sentinel-1 SAR Images. Remote Sens. 2017, 9, 1107. [Google Scholar] [CrossRef]
- Biondi, F.; Addabbo, P.; Orlando, D.; Clemente, C. Micro-Motion Estimation of Maritime Targets Using Pixel Tracking in Cosmo-Skymed Synthetic Aperture Radar Data—An Operative Assessment. Remote Sens. 2019, 11, 1637. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Guo, L.; Xu, Y.C.; Li, K.Q.; Lian, X.M. Study on real-time distance detection based on monocular vision technique. J. Image Graph. 2016, 211, 74–81. [Google Scholar]
- Fernandes, L.A.F.; Oliveira, M.M. Real-time line detection through an improved Hough transform voting scheme. Pattern Recognit. 2008, 41, 299–314. [Google Scholar]
- Zhang, J.; Sclaroff, S.; Lin, Z.; Shen, X.; Price, B.; Mech, R. Minimum Barrier Salient Object Detection at 80 FPS. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1404–1412. [Google Scholar]
- Wei, Y.; Wen, F.; Zhu, W.; Sun, J. Geodesic saliency using background priors. In ECCV; Springer: Berlin/Heidelberg, Germany, 2012; pp. 29–42. [Google Scholar]
- Zhu, W.; Liang, S.; Wei, Y.; Sun, J. Saliency optimization from robust background detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2814–2821. [Google Scholar]
- Jiang, B.; Zhang, L.; Lu, H.; Yang, C.; Yang, M.-H. Saliency detection via absorbing markov chain. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar]
- Yang, C.; Zhang, L.; Lu, H.; Ruan, X.; Yang, M.-H. Saliency detection via graph-based manifold ranking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3166–3173. [Google Scholar]
- Xie, S.; Tu, Z. Holistically-Nested Edge Detection. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3–18. [Google Scholar]
- Hou, X.; Zhang, L. Saliency Detection: A Spectral Residual Approach. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17 June 2007; pp. 1–8. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rank | ||
|---|---|---|
| SSL-1 | (8, 528.66) | 606 |
| SSL-2 | (8, 512.66) | 271 |
| SSL-3 | (8, 557.67) | 183 |
| SSL-4 | (83.85 , 572.68) | 165 |
| SSL-5 | (82.82 , 592.68) | 162 |
| Rank | |||||
|---|---|---|---|---|---|
| SSL-1 | 606 | 0 | 4.10 | 0 | 0 |
| SSL-2 | 271 | 0.75 | 3.08 | 0.50 | 0.38 |
| SSL-3 | 183 | 0.95 | 2.05 | 1 | 0.96 |
| SSL-4 | 165 | 0.99 | 6.15 | 0.12 | 0.40 |
| SSL-5 | 162 | 1 | 7.18 | 0.62 | 0.63 |
| Type of Images | Conditions | Train Set | Test Set | Total |
|---|---|---|---|---|
| Images with SSL | Sunny | 350 | 150 | 500 |
| Glare | 350 | 150 | 500 | |
| Hazy | 350 | 150 | 500 | |
| Occlusion | 350 | 150 | 500 | |
| Images with ships | One ship | 420 | 180 | 600 |
| Two ships | 210 | 90 | 300 | |
| Multiple ships | 280 | 120 | 400 | |
| Multiple ships + Occlusion | 140 | 60 | 200 |
| Parameter | Description | Value |
|---|---|---|
| h(m) | The height of the camera position | 20 |
| l(pixel) | The width of the image | 1288 |
| w(pixel) | The height of the image | 964 |
| N | Number of adjacent image blocks in local Otsu algorithm | 16 |
| Dataset | Number of Images | Mean Difference of LC Coordinate (Pixels) | Mean Difference of H (Pixels) |
|---|---|---|---|
| Sunny (Train) | 350 | 7.09 | 8.82 |
| Glare (Train) | 350 | 8.53 | 13.46 |
| Hazy (Train) | 350 | 6.09 | 7.14 |
| Occlusion (Train) | 350 | 11.45 | 18.26 |
| Sunny (Test) | 150 | 6.81 | 10.55 |
| Glare (Test) | 150 | 9.41 | 17.32 |
| Hazy (Test) | 150 | 12.75 | 18.89 |
| Occlusion (Test) | 150 | 10.46 | 14.21 |
| Dataset (Test) | Number of Images | Fefilatyev’s Method (%) | Zhang’s Method (%) | Proposed Method (%) | |||
|---|---|---|---|---|---|---|---|
| P | R | P | R | P | R | ||
| Sunny | 150 | 100 | 100 | 100 | 100 | 100 | 100 |
| Glare | 150 | 91.10 | 97.08 | 97.67 | 85.71 | 100 | 100 |
| Hazy | 150 | 94.37 | 94.37 | 99.28 | 91.95 | 99.33 | 100 |
| Occlusion | 150 | 96.62 | 98.62 | 98.58 | 93.92 | 99.33 | 100 |
| Total | 600 | 95.56 | 97.56 | 98.75 | 92.91 | 99.67 | 100 |
| Parameter | Description | Value |
|---|---|---|
| n | Number of erode operations in post-processing | 8 |
| a | The parameter of function sigmoid in post-processing | 10 |
| Threshold | Value | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T () | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| S | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 | 180 | 200 |
| Dataset (Test) | Number of Images | Number of Ships | Fefilatyev’s Method (%) | Zhang’s Method (%) | Proposed Method (%) | |||
|---|---|---|---|---|---|---|---|---|
| AP | AR | AP | AR | AP | AR | |||
| Total | 450 | 1023 | 19.15 | 35.26 | 59.21 | 73.25 | 68.50 | 88.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, X.; Zhao, D.; Pan, M.; Wang, D.; Zhao, L. Sea–Sky Line and Its Nearby Ships Detection Based on the Motion Attitude of Visible Light Sensors. Sensors 2019, 19, 4004. https://doi.org/10.3390/s19184004
Shan X, Zhao D, Pan M, Wang D, Zhao L. Sea–Sky Line and Its Nearby Ships Detection Based on the Motion Attitude of Visible Light Sensors. Sensors. 2019; 19(18):4004. https://doi.org/10.3390/s19184004
Chicago/Turabian StyleShan, Xiongfei, Depeng Zhao, Mingyang Pan, Deqiang Wang, and Lining Zhao. 2019. "Sea–Sky Line and Its Nearby Ships Detection Based on the Motion Attitude of Visible Light Sensors" Sensors 19, no. 18: 4004. https://doi.org/10.3390/s19184004
APA StyleShan, X., Zhao, D., Pan, M., Wang, D., & Zhao, L. (2019). Sea–Sky Line and Its Nearby Ships Detection Based on the Motion Attitude of Visible Light Sensors. Sensors, 19(18), 4004. https://doi.org/10.3390/s19184004