Fabric Circuit Board Connecting to Flexible Sensors or Rigid Components for Wearable Applications

Abstract
1. Introduction
2. Materials and Methods
2.1. Materials, Fabrication and Chacterization of Flexible Circuit Board (FCB)
2.2. Design and Characterization of Permanent Connections with Sensors
2.3. Design and Characterization of Detachable Connections
3. Results and Discussion
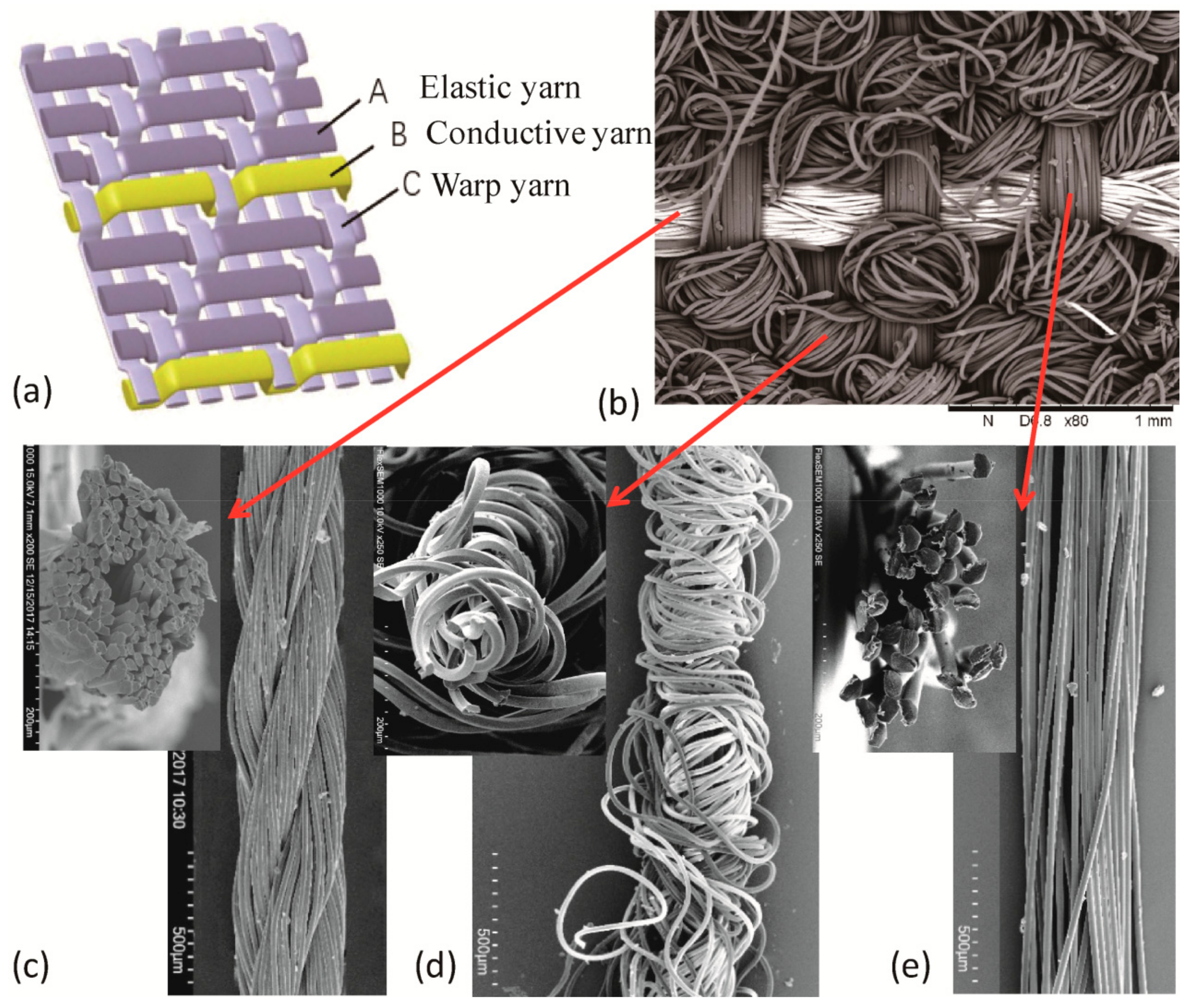
3.1. Woven FCB
3.2. Permanent Connection to Flexible Sensors
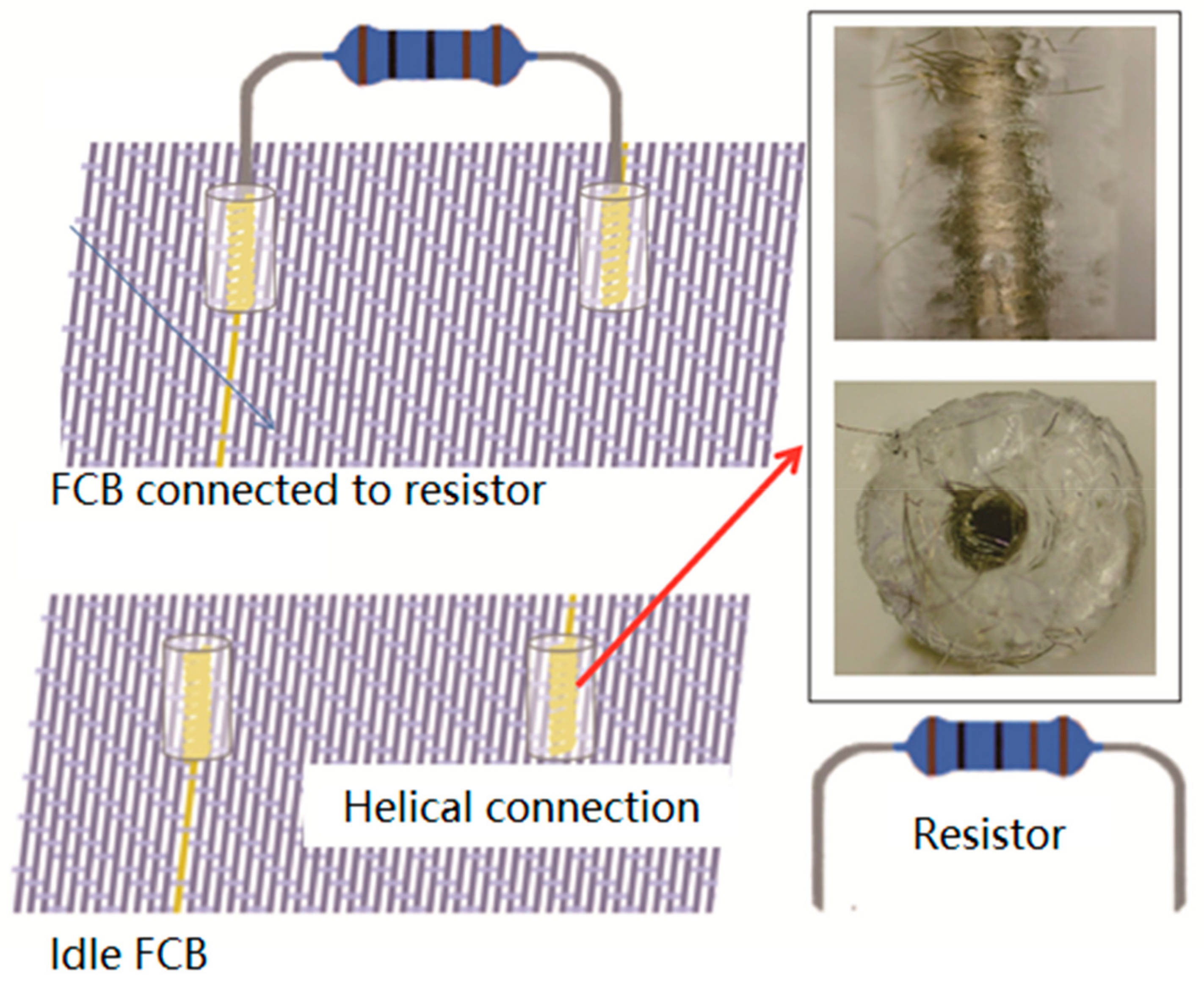
3.3. Detachable Connection to Rigid Components
3.4. Wearable Application
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Jang, H.; Park, Y.J.; Chen, X.; Das, T.; Kim, M.S.; Ahn, J.H. Graphene-Based Flexible and Stretchable Electronics. Adv. Mater. 2016, 28, 4184–4202. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Zhu, L.; Xue, J.; Hao, L.; Li, J.; He, Y.; Cheng, B. A Novel Two-Step Method for Fabricating Silver Plating Cotton Fabrics. J. Nanomater. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Stoppa, M.; Chiolerio, A. Wearable electronics and smart textiles: A critical review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [PubMed]
- Honarvar, M.G.; Latifi, M. Overview of wearable electronics and smart textiles. J. Text. Inst. Proc. Abstr. 2016, 108, 631–652. [Google Scholar] [CrossRef]
- Paradiso, R.; Taccini, N.; Loriga, G. Textile Sensing and e-Textiles (Smart Textiles). In The Engineering Handbook of Smart Technology for Aging, Disability, and Independence; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; pp. 673–692. [Google Scholar]
- Li, Q.; Zhang, L.N.; Tao, X.M.; Ding, X. Review of Flexible Temperature Sensing Networks for Wearable Physiological Monitoring. Adv. Healthc. Mater. 2017, 6, 1601371. [Google Scholar] [CrossRef] [PubMed]
- Winterhalter, C.A.; Teverovsky, J.; Wilson, P.; Slade, J.; Horowitz, W.; Tierney, E.; Sharma, V. Development of electronic textiles to support networks, communications, and medical applications in future U.S. military protective clothing systems. IEEE Trans. Inf. Technol. Biomed. 2005, 9, 402. [Google Scholar] [CrossRef]
- Profita, H.P. An electronic-textile wearable communication board for individuals with autism engaged in horse therapy. In Proceedings of the International ACM Sigaccess Conference on Computers and Accessibility, Boulder, CO, USA, 22–24 October 2012; pp. 231–232. [Google Scholar]
- Dunne, L.E.; Bibeau, K.; Mulligan, L.; Frith, A.; Simon, C. Multi-Layer E-Textile Circuits. In Proceedings of the ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 649–650. [Google Scholar]
- Bogan, K.M. Formation and Integrity Evaluation of Woven Electrically Conductive Textiles. Master’s Thesis, North Carolina State University, Raleigh, NC, USA, 2016. [Google Scholar]
- Li, Q.; Tao, X. A stretchable knitted interconnect for three-dimensional curvilinear surfaces. Text. Res. J. 2011, 81, 1171–1182. [Google Scholar]
- Li, Q.; Tao, X.M. Three-dimensionally deformable, highly stretchable, permeable, durable and washable fabric circuit boards. Proc. Math. Phys. Eng. Sci. 2014, 470, 20140472. [Google Scholar] [CrossRef]
- Cherenack, K.; Pieterson, L.V. Smart textiles: Challenges and opportunities. J. Appl. Phys. 2012, 112, 749–773. [Google Scholar] [CrossRef]
- Suh, M. Development of Wireless Transmission between Inductively Coupled Layers in Smart Clothing. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2011. [Google Scholar]
- Martin, T.; Jones, M.; Edmison, J.; Shenoy, R. Towards a design framework for wearable electronic textiles. In Proceedings of the ISWC 2019—The 18th International Semantic Web Conference, Auckland, New Zealand, 26–30 October 2003; pp. 190–199. [Google Scholar]
- Swallow, S.; Thompson, A.P. 25—Applications for woven electrical fabrics. Intell. Text. Cloth. 2006, 3, 471–488. [Google Scholar]
- Li, Q.; Chen, H.; Ran, Z.Y.; Zhang, L.N.; Xiang, R.F.; Tao, X.M.; Ding, X. Full Fabric Sensing Network with Large Deformation for Continuous Detection of Skin Temperature. Smart Mater. Struct. 2018, 27, 105017. [Google Scholar] [CrossRef]
- Agcayazi, T.; Chatterjee, K.; Bozkurt, A.; Ghosh, T.K. Flexible Interconnects for Electronic Textiles. Adv. Mater. Technol. 2018, 3, 1700277. [Google Scholar] [CrossRef]
- Locher, I.; Troster, G. Enabling Technologies for Electrical Circuits on a Woven Monofilament Hybrid Fabric. Text. Res. J. 2008, 78, 583–594. [Google Scholar] [CrossRef]
- Roh, J.S. All-fabric interconnection and one-stop production process for electronic textile sensors. Text. Res. J. 2016, 87, 1445–1456. [Google Scholar] [CrossRef]
- Varga, M.; Münzenrieder, N.; Vogt, C.; Tröster, G. Programmable e-textile composite Circuit. In Proceedings of the 2015 IEEE 65th Electronic Components and Technology Conference (ECTC), San Diego, CA, USA, 26–29 May 2015; pp. 678–684. [Google Scholar]
- Zysset, C.; Kinkeldei, T.; Münzenrieder, N.; Petti, L.; Salvatore, G.; Tröster, G. Combining electronics on flexible plastic strips with textiles. Text. Res. J. 2013, 83, 1130–1142. [Google Scholar] [CrossRef]
- Linz, T.; von Krshiwoblozki, M.; Walter, H.; Foerster, P. Contacting electronics to fabric circuits with nonconductive adhesive bonding. J. Text. Inst. 2012, 103, 1139–1150. [Google Scholar] [CrossRef]
- Locher, I.; Sefar, A.G. 10—Joining technologies for smart textiles. In Multidisciplinary Know-How for Smart-Textiles Developers; Woodhead Publishing: Cambridge, UK, 2013; pp. 285–305. [Google Scholar]
- Mecnika, V.; Scheulen, K.; Anderson, C.F.; Hörr, M.; Breckenfelder, C. Joining technologies for electronic textiles. In Electronic Textiles; Woodhead Publishing: Cambridge, UK, 2015; pp. 133–153. [Google Scholar]
- Dhawan, A.; Ghosh, T.K.; Seyam, A.M.; Muth, J. Development of Woven Fabric-based Electrical Circuits. Available online: https://www.cambridge.org/core/journals/mrs-online-proceedings-library-archive/article/development-of-woven-fabricbased-electrical-circuits/B3D4141BD8B7DB40D177DD1ADA2FAE12 (accessed on 29 August 2019).
- Dhawan, A. Development of Robust Fiber Optic Sensors Suitable for Incorporation into Textiles, and a Mechanical Analysis of Electronic Textile Circuits. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2008. [Google Scholar]
- Morris, J.E.; Wang, L. Isotropic Conductive Adhesive Interconnect Technology in Electronics Packaging Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005; pp. 1–8. [Google Scholar]
- Löher, T.; Seckel, M.; Vieroth, R.; Dils, C.; Kallmayer, C.; Ostmann, A.; Aschenbrenner, R.; Reichl, H. Stretchable electronic systems: Realization and applications. In Proceedings of the 2009 11th Electronics Packaging Technology Conference, Singapore, 9–11 December 2009; pp. 893–898. [Google Scholar]
- Ostmann, A.; Loher, T.; Seckel, M.; Bottcher, L. Manufacturing Concepts for Stretchable Electronic Systems. In Proceedings of the 2008 3rd International Microsystems, Packaging, Assembly & Circuits Technology Conference, Taipei, Taiwan, 22–24 October 2008; pp. 24–27. [Google Scholar]
- Cui, H.W.; Li, D.S.; Fan, Q. Reliability of flexible electrically conductive adhesives. Polym. Adv. Technol. 2013, 24, 114–117. [Google Scholar] [CrossRef]
- Kim, S.C.; Kim, Y.H. Review paper: Flip chip bonding with anisotropic conductive film (ACF) and nonconductive adhesive (NCA). Curr. Appl. Phys. 2013, 13, S14–S25. [Google Scholar] [CrossRef]
- Zysset, C.; Kinkeldei, T.W.; Munzenrieder, N.; Cherenack, K.; Troster, G. Integration Method for Electronics in Woven Textiles. IEEE Trans. Compon. Packag. Manuf. Technol. 2012, 2, 1107–1117. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadinajafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296. [Google Scholar] [CrossRef]
- Cherenack, K.; Zysset, C.; Kinkeldei, T.; Münzenrieder, N.; Tröster, G. Woven electronic fibers with sensing and display functions for smart textiles. Adv. Mater. 2010, 22, 5178–5182. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Tao, X.; So, R.C.H.; Shu, L.; Yang, B.; Li, Y. Monitoring elbow isometric contraction by novel wearable fabric sensing device. Smart Mater. Struct. 2016, 25, 125022. [Google Scholar] [CrossRef]
- Wang, X.; Tao, X.; Rch, S. A Bio-mechanical Model for Elbow Isokinetic and Isotonic Flexions. Sci. Rep. UK 2017, 7, 8919. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | R0 (Ω) | Rmax (Ω) | Temperature Range (°C) | TCR (°C−1) |
|---|---|---|---|---|
| FTS | 65.65 (±0.04) | 69.70 (±0.50) | 25–45 | 0.0031 |
| FTScon-0% | 71.20 (±0.07) | 76.41 (±0.08) | 25–45 | 0.0037 |
| FTScon-15% 1 | 71.04 (±0.03) | 75.29 (±0.13) | 25–45 | 0.0030 |
| FTScon-30% | 70.86 (±1.17) | 75.73 (±0.37) | 25–45 | 0.0034 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Ran, Z.; Ding, X.; Wang, X. Fabric Circuit Board Connecting to Flexible Sensors or Rigid Components for Wearable Applications. Sensors 2019, 19, 3745. https://doi.org/10.3390/s19173745
Li Q, Ran Z, Ding X, Wang X. Fabric Circuit Board Connecting to Flexible Sensors or Rigid Components for Wearable Applications. Sensors. 2019; 19(17):3745. https://doi.org/10.3390/s19173745
Chicago/Turabian StyleLi, Qiao, Ziyuan Ran, Xin Ding, and Xi Wang. 2019. "Fabric Circuit Board Connecting to Flexible Sensors or Rigid Components for Wearable Applications" Sensors 19, no. 17: 3745. https://doi.org/10.3390/s19173745
APA StyleLi, Q., Ran, Z., Ding, X., & Wang, X. (2019). Fabric Circuit Board Connecting to Flexible Sensors or Rigid Components for Wearable Applications. Sensors, 19(17), 3745. https://doi.org/10.3390/s19173745