Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors


Abstract
1. Introduction
2. Materials and Methods
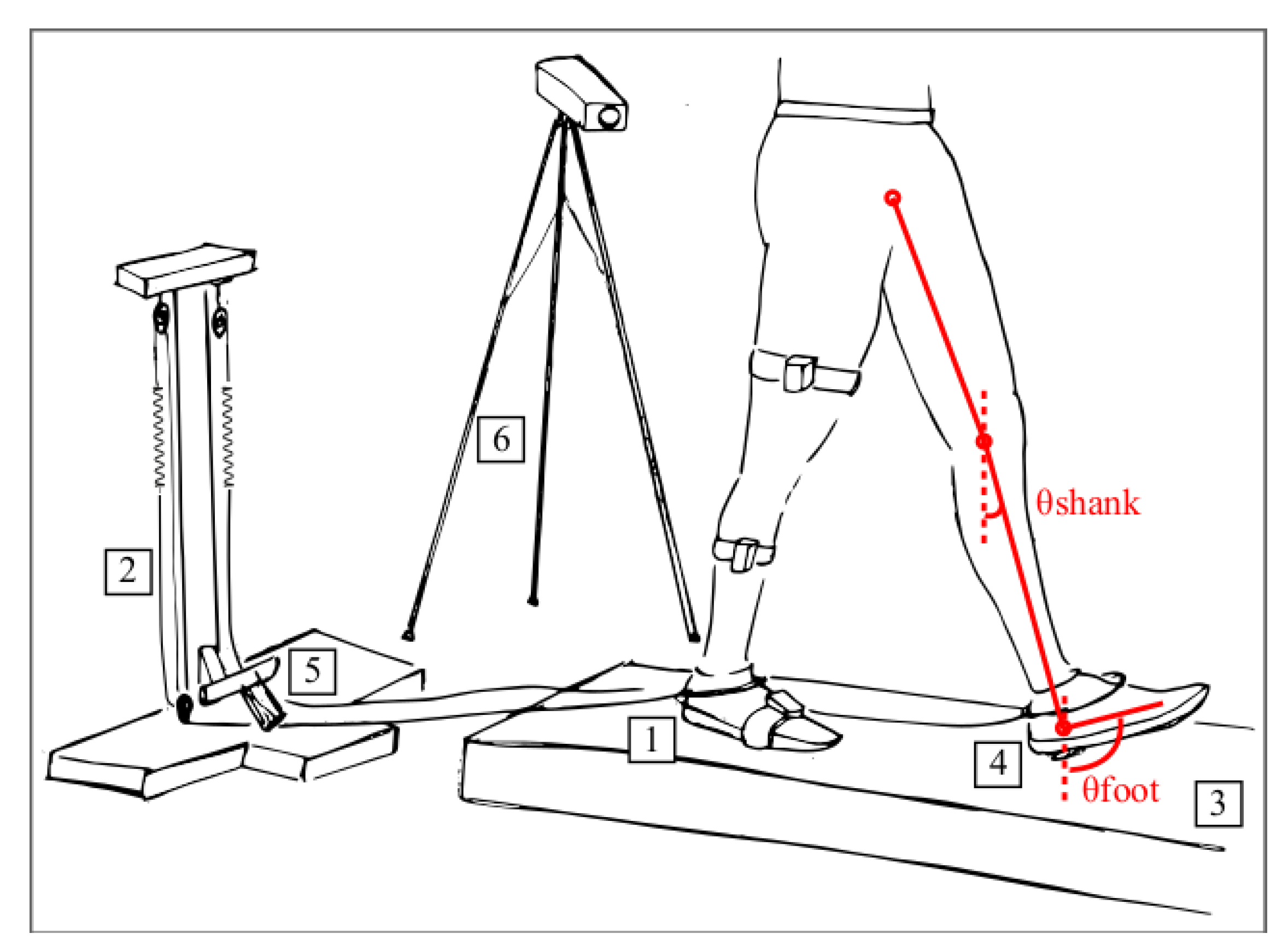
2.1. Participants, Experimental Setup, and Protocol
2.2. Data Pre-Processing
2.3. Pre-Impact Detection Algorithm (PIDA)
- The algorithm first selected a w-long portion of the error signal prior to the current time frame and computed its mean (μ) and standard deviation (σ);
- Then, it compared the absolute value of the error signal at the current time-frame with a threshold set at μ + kσ, where k represents a corrective factor to shape the value of the threshold;
- If the absolute value of the error was above the threshold, the algorithm delivered a warning;
- A set of r consecutive warnings was used to detect a lack of balance that could potentially result in an incipient fall.
2.4. PIDA Tuning
3. Results
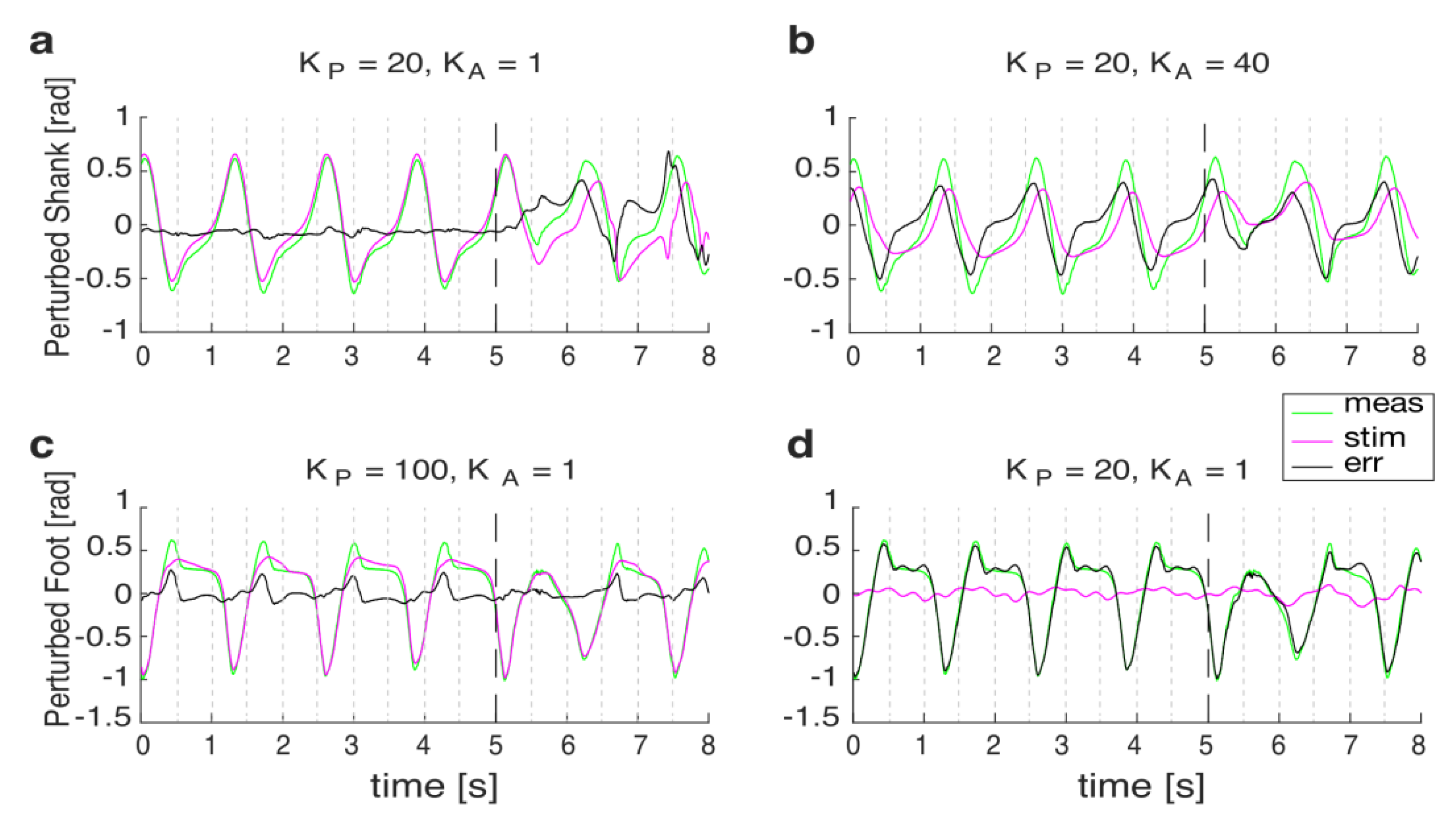
3.1. Time Course of Elevation Angles
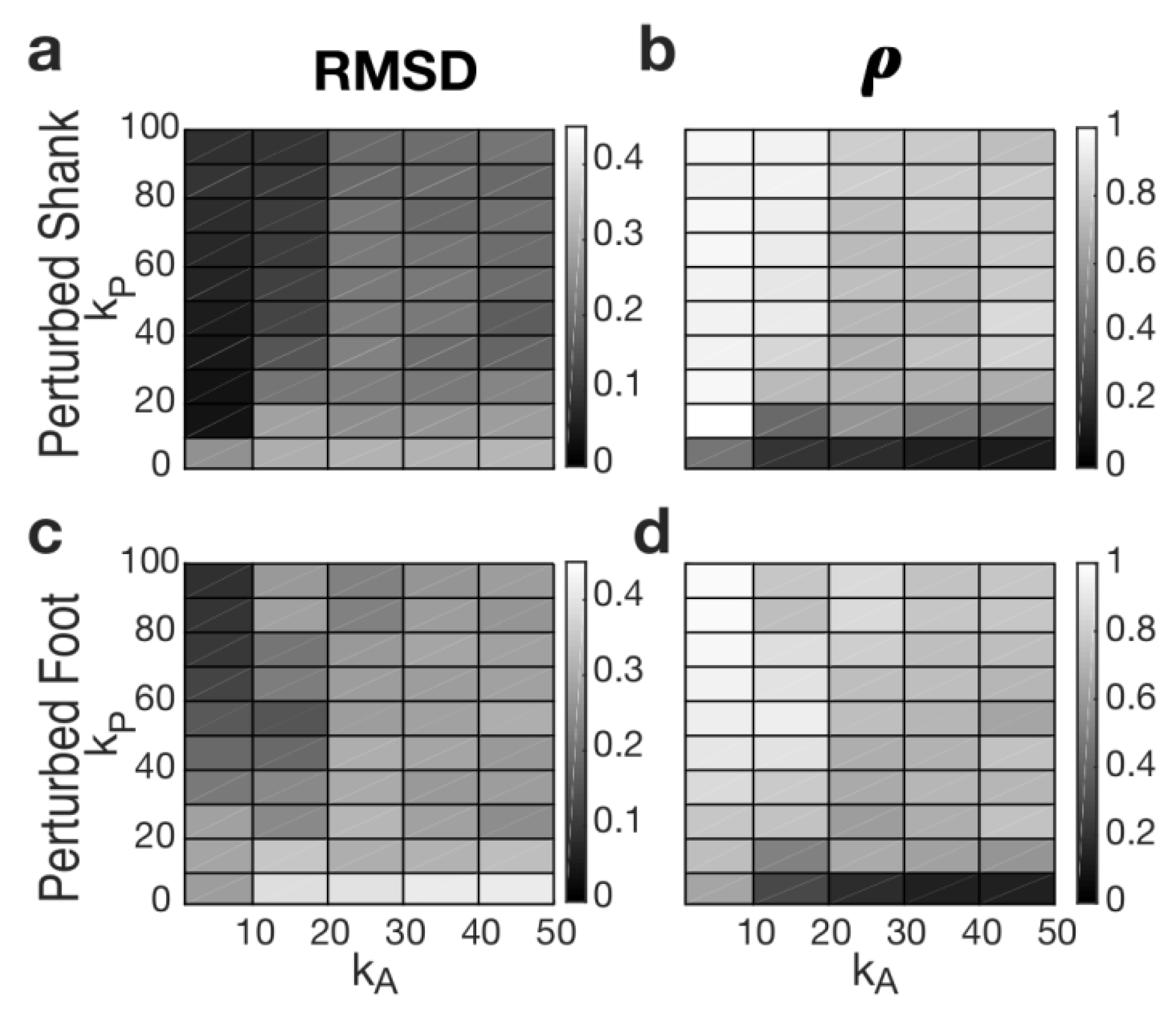
3.2. Tuning of the AOs
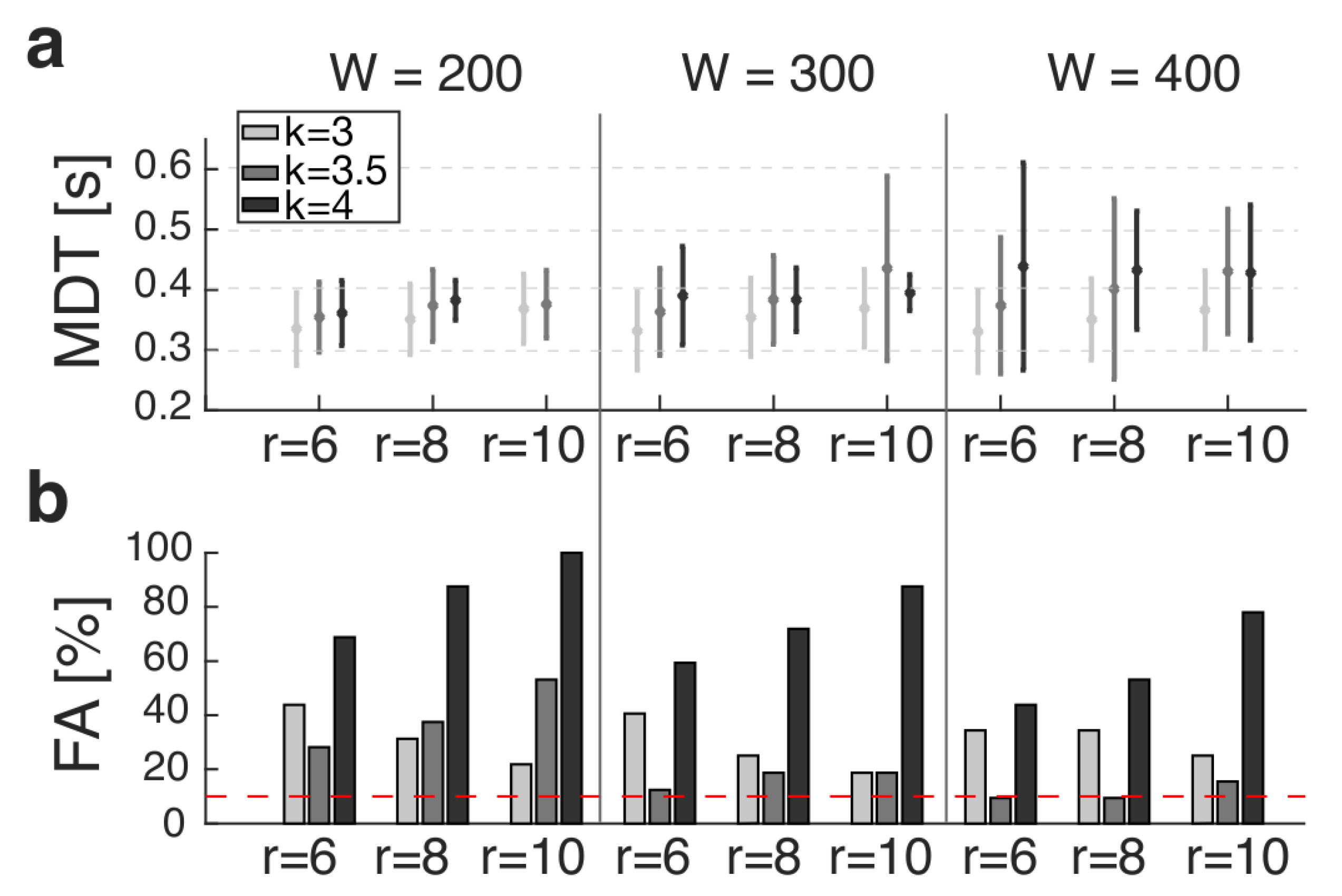
3.3. Tuning of the ATBA
- If r = 6, the MDT was 0.37±0.11 s, with FA equal to 9.4%;
- If r = 8, the MDT was 0.40±0.15 s, with FA equal to 9.4%.
4. Discussion
4.1. Tuning of the AOs
4.2. Tuning of the ATBA
4.3. Sensors Position and Related Performance of the Algorithm
4.4. Comparison with the State of Art
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Park, S.H. Tools for assessing fall risk in the elderly: A systematic review and meta-analysis. Aging Clin. Exp. Res. 2018, 30, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Chaudhuri, S.; Thompson, H.; Demiris, G. Fall Detection Devices and Their Use with Older Adults: A Systematic Review. J. Geriatr. Phys. Ther. 2014, 37, 178–196. [Google Scholar] [CrossRef] [PubMed]
- Howcroft, J.; Kofman, J.; Lemaire, E.D. Review of fall risk assessment in geriatric populations using inertial sensors. J. Neuroeng. Rehabil. 2013, 10, 91. [Google Scholar] [CrossRef] [PubMed]
- Rubenstein, L.Z. Falls in older people: Epidemiology, risk factors and strategies for prevention. Age Ageing 2006, 35 (Suppl. S2), ii37–ii41. [Google Scholar] [CrossRef]
- O’Sullivan, M.; Blake, C.; Cunningham, C.; Boyle, G.; Finucane, C. Correlation of accelerometry with clinical balance tests in older fallers and non-fallers. Age Ageing 2009, 38, 308–313. [Google Scholar] [CrossRef] [PubMed]
- Berg, W.P.; Alessio, H.M.; Mills, E.M.; Tong, C. Circumstances and consequences of falls in independent community-dwelling older adults. Age Ageing 1997, 26, 261–268. [Google Scholar] [CrossRef] [PubMed]
- WHO. WHO Global Report on Falls Prevention in Older Age; World Health Organization: Geneva, Switzerland, 2008. [Google Scholar]
- Alekna, V.; Stukas, R.; Tamulaityte-Morozoviene, I.; Surkiene, G.; Tamulaitiene, M. Self-reported consequences and healthcare costs of falls among elderly women. Medicina-Lithuania 2015, 51, 57–62. [Google Scholar] [CrossRef]
- Stevens, J.A.; Corso, P.S.; Finkelstein, E.A.; Miller, T.R. The costs of fatal and non-fatal falls among older adults. Inj. Prev. 2006, 12, 290–295. [Google Scholar] [CrossRef]
- Bouldin, E.L.D.; Andresen, E.M.; Dunton, N.E.; Simon, M.; Waters, T.M.; Liu, M.Z.; Daniels, M.J.; Mion, L.C.; Shorr, R.I. Falls Among Adult Patients Hospitalized in the United States: Prevalence and Trends. J. Patient Saf. 2013, 9, 13–17. [Google Scholar] [CrossRef]
- Fareseeing. Home Page. Available online: http://farseeingresearch.eu (accessed on 26 August 2019).
- InCHIANTI. Home Page. Available online: Inchiantistudy.net/wp/ (accessed on 26 August 2019).
- Rajagopalan, R.; Litvan, I.; Jung, T.P. Fall Prediction and Prevention Systems: Recent Trends, Challenges, and Future Research Directions. Sensors 2017, 17, 2509. [Google Scholar] [CrossRef]
- Montesinos, L.; Castaldo, R.; Pecchia, L. Wearable Inertial Sensors for Fall Risk Assessment and Prediction in Older Adults: A Systematic Review and Meta-Analysis. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 573–582. [Google Scholar] [CrossRef] [PubMed]
- Sun, R.P.; Sosnoff, J.J. Novel sensing technology in fall risk assessment in older adults: A systematic review. BMC Geriatr. 2018, 18, 14. [Google Scholar] [CrossRef] [PubMed]
- Delahoz, Y.S.; Labrador, M.A. Survey on Fall Detection and Fall Prevention Using Wearable and External Sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef] [PubMed]
- Danielsen, A.; Olofsen, H.; Bremdal, B.A. Increasing fall risk awareness using wearables: A fall risk awareness protocol. J. Biomed. Inform. 2016, 63, 184–194. [Google Scholar] [CrossRef] [PubMed]
- Shany, T.; Wang, K.; Liu, Y.; Lovell, N.H.; Redmond, S.J. Review: Are we stumbling in our quest to find the best predictor? Over-optimism in sensor-based models for predicting falls in older adults. Healthc. Technol. Lett. 2015, 2, 79–88. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Horak, F.B.; Zampieri, C.; Carlson-Kuhta, P.; Nutt, J.G.; Aminian, K. iTUG, a Sensitive and Reliable Measure of Mobility. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 303–310. [Google Scholar] [CrossRef] [PubMed]
- Nyan, M.N.; Tay, F.E.; Murugasu, E. A wearable system for pre-impact fall detection. J. Biomech. 2008, 41, 3475–3481. [Google Scholar] [CrossRef]
- Tamura, T.; Yoshimura, T.; Sekine, M.; Uchida, M.; Tanaka, O. A Wearable Airbag to Prevent Fall Injuries. IEEE Trans. Inf Technol. Biomed. 2009, 13, 910–914. [Google Scholar] [CrossRef]
- Shi, G.Y.; Chan, C.S.; Li, W.J.; Leung, K.S.; Zou, Y.X.; Jin, Y.F. Mobile Human Airbag System for Fall Protection Using MEMS Sensors and Embedded SVM Classifier. IEEE Sens. J. 2009, 9, 495–503. [Google Scholar] [CrossRef]
- Monaco, V.; Tropea, P.; Aprigliano, F.; Martelli, D.; Parri, A.; Cortese, M.; Molino-Lova, R.; Vitiello, N.; Micera, S. An ecologically-controlled exoskeleton can improve balance recovery after slippage. Sci. Rep. 2017, 7, 46721. [Google Scholar] [CrossRef]
- Aprigliano, F.; Monaco, V.; Tropea, P.; Martelli, A.; Vitiello, N.; Micera, S. Effectiveness of a robot-mediated strategy while counteracting multidirectional slippages. Robotica 2019, 1–13. [Google Scholar] [CrossRef]
- Tropea, P.; Vitiello, N.; Martelli, D.; Aprigliano, F.; Micera, S.; Monaco, V. Detecting Slipping-Like Perturbations by Using Adaptive Oscillators. Ann. Biomed. Eng. 2014, 43, 416–426. [Google Scholar] [CrossRef]
- Paulich, M.; Schepers, M.; Rudigkeit, N.; Bellusci, G. Xsens MTw Awinda: Miniature Wireless Inertial-Magnetic Motion Tracker for Highly Accurate 3D Kinematic Applications; Xsens: Enschede, The Netherlands, 2018. [Google Scholar]
- Alton, F.; Baldey, L.; Caplan, S.; Morrissey, M.C. A kinematic comparison of overground and treadmill walking. Clin. Biomech. 1998, 13, 434–440. [Google Scholar] [CrossRef]
- Ronsse, R.; Lenzi, T.; Vitiello, N.; Koopman, B.; van Asseldonk, E.; De Rossi, S.M.M.; van den Kieboom, J.; van der Kooij, H.; Carrozza, M.C.; Ijspeert, A.J. Oscillator-based assistance of cyclical movements: Model-based and model-free approaches. Med. Biol. Eng. Comput. 2011, 49, 1173–1185. [Google Scholar] [CrossRef]
- Aprigliano, F.; Martelli, D.; Micera, S.; Monaco, V. Intersegmental coordination elicited by unexpected multidirectional slipping-like perturbations resembles that adopted during steady locomotion. J. Neurophysiol. 2016, 115, 728–740. [Google Scholar] [CrossRef]
- Aprigliano, F.; Martelli, D.; Tropea, P.; Pasquini, G.; Micera, S.; Monaco, V. Aging does not affect the intralimb coordination elicited by slip-like perturbation of different intensities. J. Neurophysiol. 2017, 118, 1739–1748. [Google Scholar] [CrossRef]
- Aprigliano, F.; Guaitolini, M.; Sabatini, A.M.; Micera, S.; Monaco, V. Pre-impact detection algorithm to identify lack of balance due to tripping-like perturbations. In Proceedings of the IEEE International Conference of Engineering in Medicine and Biology, Berlin, Germany, 23–27 July 2019. [Google Scholar]
- Ronsse, R.; De Rossi, S.M.M.; Vitiello, N.; Lenzi, T.; Koopman, B.; van der Kooij, H.; Carrozza, M.C.; Ijspeert, A.J. Real-time Estimate of Period Derivatives using Adaptive Oscillators: Application to Impedance-Based Walking Assistance. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (Iros), Algarve, Portugal, 7–12 October 2012; pp. 3362–3368. [Google Scholar]
- Orendurff, M.S.; Schoen, J.A.; Bernatz, G.C.; Segal, A.D.; Klute, G.K. How humans walk: Bout duration, steps per bout, and rest duration. J. Rehabil. Res. Dev. 2008, 45, 1077–1089. [Google Scholar] [CrossRef]
- Hu, X.Y.; Qu, X.D. Pre-impact fall detection. Biomed. Eng. Online 2016, 15, 61. [Google Scholar] [CrossRef]
- Lee, J.K.; Robinovitch, S.N.; Park, E.J. Inertial Sensing-Based Pre-Impact Detection of Falls Involving Near-Fall Scenarios. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 258–266. [Google Scholar] [CrossRef]
- He, J.; Bai, S.; Wang, X.Y. An Unobtrusive Fall Detection and Alerting System Based on Kalman Filter and Bayes Network Classifier. Sensors 2017, 17, 1393. [Google Scholar] [CrossRef]
- Hsieh, C.Y.; Liu, K.C.; Huang, C.N.; Chu, W.C.; Chan, C.T. Novel Hierarchical Fall Detection Algorithm Using a Multiphase Fall Model. Sensors 2017, 17, 307. [Google Scholar] [CrossRef]
- Zhang, F.; D’Andrea, S.E.; Nunnery, M.J.; Kay, S.M.; Huang, H. Towards Design of a Stumble Detection System for Artificial Legs. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 567–577. [Google Scholar] [CrossRef][Green Version]
- Wu, G. Distinguishing fall activities from normal activities by velocity characteristics. J. Biomech. 2000, 33, 1497–1500. [Google Scholar] [CrossRef]
- Bourke, A.K.; O’Donovan, K.J.; Olaighin, G. The identification of vertical velocity profiles using an inertial sensor to investigate pre-impact detection of falls. Med. Eng. Phys. 2008, 30, 937–946. [Google Scholar] [CrossRef]
- Aziz, O.; Russell, C.M.; Park, E.J.; Robinovitch, S.N. The Effect of Window Size and Lead Time on Pre-Impact Fall Detection Accuracy Using Support Vector Machine Analysis of Waist Mounted Inertial Sensor Data. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Chicago, IL, USA, 26–30 August 2014; pp. 30–33. [Google Scholar]
- Becker, C.; Schwickert, L.; Mellone, S.; Bagala, F.; Chiari, L.; Helbostad, J.L.; Zijlstra, W.; Aminian, K.; Bourke, A.; Todd, C.; et al. Proposal for a multiphase fall model based on real-world fall recordings with body-fixed sensors. Z. Fur Gerontol. Und Geriatr. 2012, 45, 707–715. [Google Scholar] [CrossRef]
- Martelli, D.; Aprigliano, F.; Tropea, P.; Pasquini, G.; Micera, S.; Monaco, V. Stability against backward balance loss: Age-related modifications following slip-like perturbations of multiple amplitudes. Gait Posture 2017, 53, 207–214. [Google Scholar] [CrossRef]
- Robinovitch, S.N.; Feldman, F.; Yang, Y. Video capture of the circumstances of falls in elderly people residing in long-term care: An observational study. Lancet 2013, 381, 47–54. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tuning Parameter | Description | Values |
|---|---|---|
| kP | Phase learning gain of the adaptive oscillators | From 1 to 100, step 10 |
| kA | Amplitude learning gain of the adaptive oscillators | From 1 to 50, step 10 |
| w | Length of the observed bin | 200, 300, 400 samples |
| k | Shaping factor of the threshold | 3, 3.5, 4 |
| r | Maximum number of warnings | 6, 8, 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aprigliano, F.; Micera, S.; Monaco, V. Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors. Sensors 2019, 19, 3713. https://doi.org/10.3390/s19173713
Aprigliano F, Micera S, Monaco V. Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors. Sensors. 2019; 19(17):3713. https://doi.org/10.3390/s19173713
Chicago/Turabian StyleAprigliano, Federica, Silvestro Micera, and Vito Monaco. 2019. "Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors" Sensors 19, no. 17: 3713. https://doi.org/10.3390/s19173713
APA StyleAprigliano, F., Micera, S., & Monaco, V. (2019). Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors. Sensors, 19(17), 3713. https://doi.org/10.3390/s19173713