RSS Indoor Localization Based on a Single Access Point


Abstract
1. Introduction
2. Related Work
2.1. Fingerprint-Based Positioning Methodologies
2.2. Mitigating Multipath and Polarization Effects
2.3. RTLS Performance Evaluation Techniques
3. Proposed Approach
High-Level Description of the Proposed Approach

4. Test Environment
5. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AOA | Angle of Arrival |
| AP | Access Point |
| BLE | Bluetooth Low Energy |
| IoT | Internet of Things |
| KNN | K Nearest Neighbour |
| MAP | Maximum A Posteriori |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MMSE | Minimum Mean Square Error |
| MS | Mobile Station |
| NN | Nearest Neighbour |
| RSS | Received Signal Strength |
| RTLS | Real Time Localization System |
| TDOA | Time Difference of Arrival |
| TOA | Time of Arrival |
| TOF | Time of Flight |
| VLP | Visual Light Positioning |
| WKNN | Weighted K Nearest Neighbour |
References
- Hossain, A.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- He, S.; Chan, S. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Lausnay, S.D.; Strycker, L.D.; Goemaere, J.P.; Nauwelaers, B.; Stevens, N. A survey on multiple access Visible Light Positioning. In Proceedings of the 2016 IEEE International Conference on Emerging Technologies and Innovative Business Practices for the Transformation of Societies (EmergiTech), Balaclava, Mauritius, 3–6 August 2016; pp. 38–42. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Fusing Bluetooth Beacon Data with Wi-Fi Radiomaps for Improved Indoor Localization. Sensors 2017, 17, 812. [Google Scholar] [CrossRef] [PubMed]
- Antevski, K.; Redondi, A.E.C.; Pitic, R. A hybrid BLE and Wi-Fi localization system for the creation of study groups in smart libraries. In Proceedings of the 2016 9th IFIP Wireless and Mobile Networking Conference (WMNC), Colmar, France, 11–13 July 2016; pp. 41–48. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Combining smart lighting and radio fingerprinting for improved indoor localization. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 447–452. [Google Scholar]
- Rabadan, J.; Guerra, V.; RodrÃguez, R.; Rufo, J.; Luna-Rivera, M.; Perez-Jimenez, R. Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation. Sensors 2017, 17, 330. [Google Scholar] [CrossRef] [PubMed]
- Kokkinis, A.; Raspopoulos, M.; Kanaris, L.; Liotta, A.; Stavrou, S. Map-aided fingerprint-based indoor positioning. In Proceedings of the 2013 IEEE 24th International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 270–274. [Google Scholar] [CrossRef]
- Mirowski, P.; Ho, T.K.; Yi, S.; Macdonald, M. SignalSLAM: Simultaneous localization and mapping with mixed WiFi, Bluetooth, LTE and magnetic signals. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar] [CrossRef]
- Li, L.; Yang, W.; Wang, G. Intelligent fusion of information derived from received signal strength and inertial measurements for indoor wireless localization. AEU Int. J. Electron. Commun. 2016, 70, 1105–1113. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Zhang, P.; Lan, H.; Niu, X.; El-Sheimy, N. An improved inertial/wifi/magnetic fusion structure for indoor navigation. Inform. Fus. 2017, 34, 101–119. [Google Scholar] [CrossRef]
- Wen, F.; Liang, C. Fine-Grained Indoor Localization Using Single Access Point With Multiple Antennas. IEEE Sens. J. 2015, 15, 1538–1544. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Fortino, G.; Liotta, A.; Stavrou, S. Sample Size Determination Algorithm for fingerprint-based indoor localization systems. Comput. Netw. 2016, 101, 169–177. [Google Scholar] [CrossRef]
- Raspopoulos, M.; Laoudias, C.; Kanaris, L.; Kokkinis, A.; Panayiotou, C.; Stavrou, S. 3D Ray Tracing for device-independent fingerprint-based positioning in WLANs. In Proceedings of the 2012 9th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012; pp. 109–113. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Quality of Fingerprint Radiomaps for Positioning Systems. In Proceedings of the 2017 24th International Conference on Telecommunications (ICT) (ICT 2017), Limassol, Cyprus, 3–5 May 2017. [Google Scholar]
- Kjærgaard, M. A Taxonomy for Radio Location Fingerprinting. In Proceedings of the 3rd International Conference on Location-and Context-Awareness, Oberpfaffenhofen, Germany, 20–21 September 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 139–156. [Google Scholar]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piche, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication (WPNC), Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar]
- Li, B.; Salter, J.; Dempster, A.G.; Rizos, C. Indoor positioning techniques based on wireless LAN. In Proceedings of the LAN, First IEEE International Conference on Wireless Broadband and Ultra Wideband Communications, Hangzhou, China, 6–9 November 2006; pp. 13–16. [Google Scholar]
- Bahl, P.; Padmanabhan, V. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the 2000 IEEE International Conference on Computer Communications INFOCOM, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Yeung, W.; Zhou, J.; Ng, J. Enhanced Fingerprint-Based Location Estimation System in Wireless LAN Environment. In Emerging Directions in Embedded and Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2007; pp. 273–284. [Google Scholar]
- Saha, S.; Chaudhuri, K.; Sanghi, D.; Bhagwat, P. Location determination of a mobile device using IEEE 802.11b access point signals. In Proceedings of the 2003 IEEE Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; Volume 3, pp. 1987–1992. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, MobiSys ’05, Washington, DC, USA, 6–8 June 2005; ACM: New York, NY, USA, 2005; pp. 205–218. [Google Scholar] [CrossRef]
- Roos, T.; Myllymaki, P.; Tirri, H.; Misikangas, P.; Sievanen, J. A Probabilistic Approach to WLAN User Location Estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Szumny, R.; Kurek, K.; Modelski, J. Attenuation of multipath components using directional antennas and circular polarization for indoor wireless positioning systems. In Proceedings of the 2007 European Microwave Conference, Munich, Germany, 10–12 October 2007; pp. 1680–1683. [Google Scholar] [CrossRef]
- Barralet, M.; Huang, X.; Sharma, D. Effects of antenna polarization on RSSI based location identification. In Proceedings of the 2009 11th International Conference on Advanced Communication Technology, Phoenix Park, Korea, 15–18 February 2009; Volume 1, pp. 260–265. [Google Scholar]
- Kanaris, L.; Kokkinis, A.; Raspopoulos, M.; Liotta, A.; Stavrou, S. Improving RSS fingerprint-based localization using directional antennas. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 1593–1597. [Google Scholar] [CrossRef]
- Cidronali, A.; Maddio, S.; Giorgetti, G.; Magrini, I.; Gupta, S.K.S.; Manes, G. A 2.45 GHz smart antenna for location-aware single-anchor indoor applications. In Proceedings of the 2009 IEEE MTT-S International Microwave Symposium Digest, Boston, MA, USA, 7–12 June 2009; pp. 1553–1556. [Google Scholar] [CrossRef]
- Cidronali, A.; Maddio, S.; Giorgetti, G.; Manes, G. Analysis and Performance of a Smart Antenna for 2.45-GHz Single-Anchor Indoor Positioning. IEEE Trans. Microw. Theory Tech. 2010, 58, 21–31. [Google Scholar] [CrossRef]
- Sangthong, J.; Promwong, S.; Supanakoon, P. Comparison of UWB fingerprinting with vertical and horizontal polarizations for indoor localization. In Proceedings of the ECTI-CON2010: The 2010 ECTI International Confernce on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Chiang Mai, Thailand, 19–21 May 2010; pp. 588–592. [Google Scholar]
- Szalay, Z.; Nagy, L. Utilization of linearly and circularly polarized antennas for indoor positioning. In Proceedings of the 2015 17th International Conference on Transparent Optical Networks (ICTON), Budapest, Hungary, 5–9 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Wallbaum, M.; Diepolder, S. Benchmarking Wireless LAN Location Systems Wireless LAN Location Systems. In Proceedings of the 2005 The Second IEEE International Workshop on Mobile Commerce and Services, WMCS ’05, Munich, Germany, 19 July 2005; pp. 42–51. [Google Scholar] [CrossRef]
- Ji, Y.; Biaz, S.; Wu, S.; Qi, B. Optimal Sniffers Deployment On Wireless Indoor Localization. In Proceedings of the 2007 16th International Conference on Computer Communications and Networks, ICCCN 2007, Honolulu, HI, USA, 13–16 August 2007; pp. 251–256. [Google Scholar] [CrossRef]
- Ji, Y. Location Determination within Wireless Networks; VDM Publishing House Ltd.: Hong Kong, China, 2009; p. 136. [Google Scholar]
- Ji, Y.; Chen, L. Dynamic Indoor Location Determination: Mechanisms and Robustness Evaluation. In Proceedings of the 2010 Sixth Int Autonomic and Autonomous Systems (ICAS) Conference, Cancun, Mexico, 7–13 March 2010; pp. 70–77. [Google Scholar] [CrossRef]
- Kim, J.; Ji, M.; Cho, Y.; Lee, Y.; Park, S. Performance evaluation of fingerprint based location system using dynamic collection. In Proceedings of the 2013 International Conference on ICT Convergence (ICTC), Jeju, Korea, 14–16 October 2013; pp. 950–954. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Raspopoulos, M.; Stavrou, S. A Binomial Distribution Approach for the Evaluation of Indoor Positioning Systems. In Proceedings of the 20th International Conference on Telecommunications (ICT 2013), Casablanca, Morocco, 6–8 May 2013. [Google Scholar]
- TruNET Wireless, Fractal Networx Limited. Available online: www.fractalnetworx.com (accessed on 26 August 2019).
- Stavrou, S.; Saunders, S. Review of constitutive parameters of building materials. In Proceedings of the Twelfth International Conference on (Conf. Publ. No. 491). IET, Antennas and Propagation, (ICAP 2003), Exeter, UK, 31 March–3 April 2003; Volume 1, pp. 211–215. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | El.Per. (F/m) | L. Tangent |
|---|---|---|
| Concrete | 3.9 | 0.23 |
| Wood | 2 | 0.025 |
| Brick | 5.5 | 0.03 |
| Metal | 1 | 1,000,000 |
| Plasterboard | 3 | 0.067 |
| Glass | 4.5 | 0.007 |
| Scenario ID | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Antenna 1 Pol | V | H | H | H | H | H | H | H | H | H | H |
| Antenna 2 Pol | V | V | V | V | V | V | H | H | H | H | H |
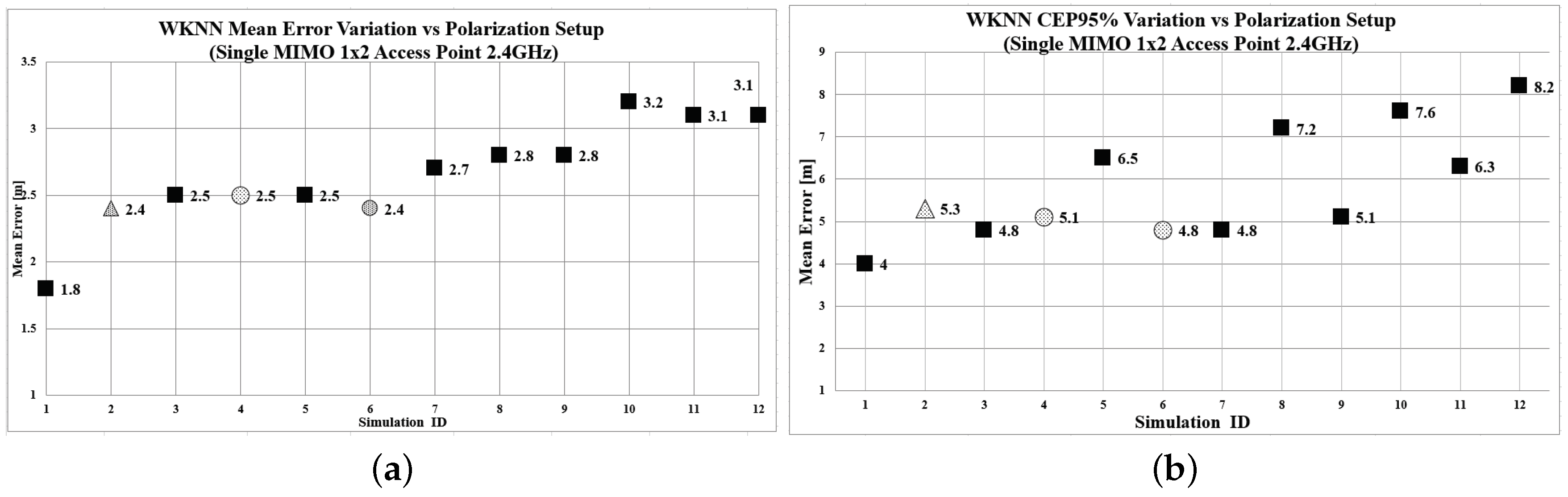
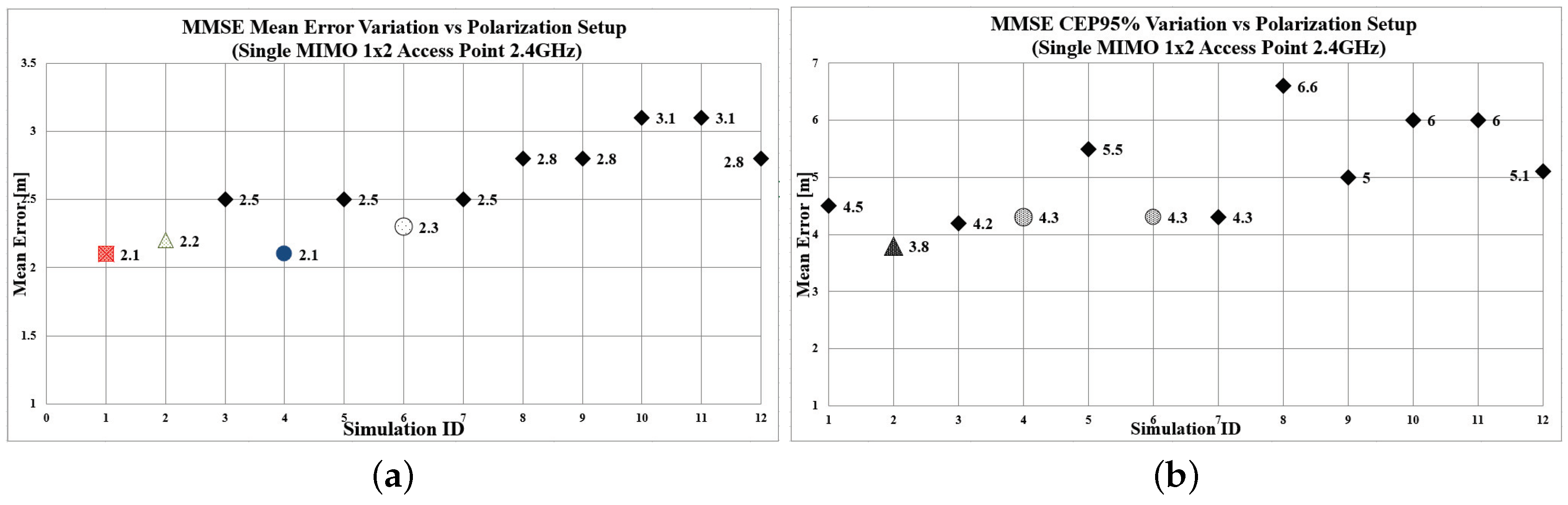
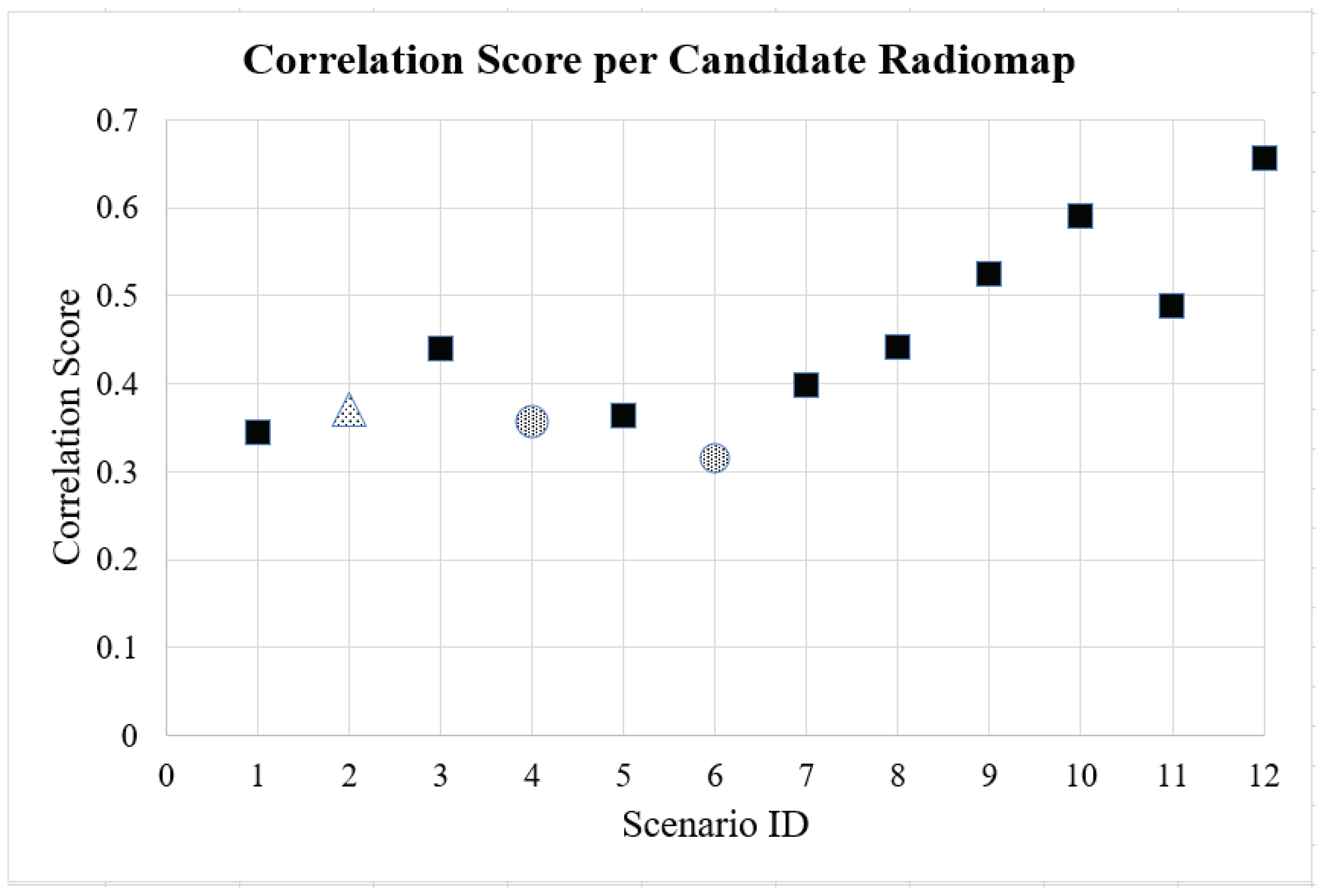
| Decision Factor | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| WKNN Mean Error (m) | 1.91 | 2.21 | 1.91 | 1.98 | 1.69 | 2.09 | 2.27 | 2.72 | 3.01 | 2.67 | 3.25 |
| WKNN CEP 95% (m) | 3.41 | 4.27 | 3.69 | 3.36 | 3.45 | 3.48 | 6.22 | 4.45 | 2.99 | 9.00 | 9.85 |
| MMSE Mean Error (m) | 2.17 | 2.48 | 2.11 | 2.49 | 2.29 | 2.55 | 2.82 | 2.71 | 3.08 | 3.09 | 2.52 |
| MMSE CEP 95% (m) | 3.78 | 4.14 | 4.19 | 5.60 | 4.27 | 4.37 | 4.97 | 4.54 | 6.07 | 5.86 | 5.01 |
| Correlation Score | 0.371 | 0.440 | 0.355 | 0.363 | 0.314 | 0.398 | 0.442 | 0.525 | 0.591 | 0.488 | 0.657 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kokkinis, A.; Kanaris, L.; Liotta, A.; Stavrou, S. RSS Indoor Localization Based on a Single Access Point. Sensors 2019, 19, 3711. https://doi.org/10.3390/s19173711
Kokkinis A, Kanaris L, Liotta A, Stavrou S. RSS Indoor Localization Based on a Single Access Point. Sensors. 2019; 19(17):3711. https://doi.org/10.3390/s19173711
Chicago/Turabian StyleKokkinis, Akis, Loizos Kanaris, Antonio Liotta, and Stavros Stavrou. 2019. "RSS Indoor Localization Based on a Single Access Point" Sensors 19, no. 17: 3711. https://doi.org/10.3390/s19173711
APA StyleKokkinis, A., Kanaris, L., Liotta, A., & Stavrou, S. (2019). RSS Indoor Localization Based on a Single Access Point. Sensors, 19(17), 3711. https://doi.org/10.3390/s19173711