An FPGA-Based Ultra-High-Speed Object Detection Algorithm with Multi-Frame Information Fusion


Abstract
:1. Introduction
2. Related Work
3. Ultra-High-Speed Object Detection Algorithms
3.1. Existing Hardware Oriented HOG Algorithm
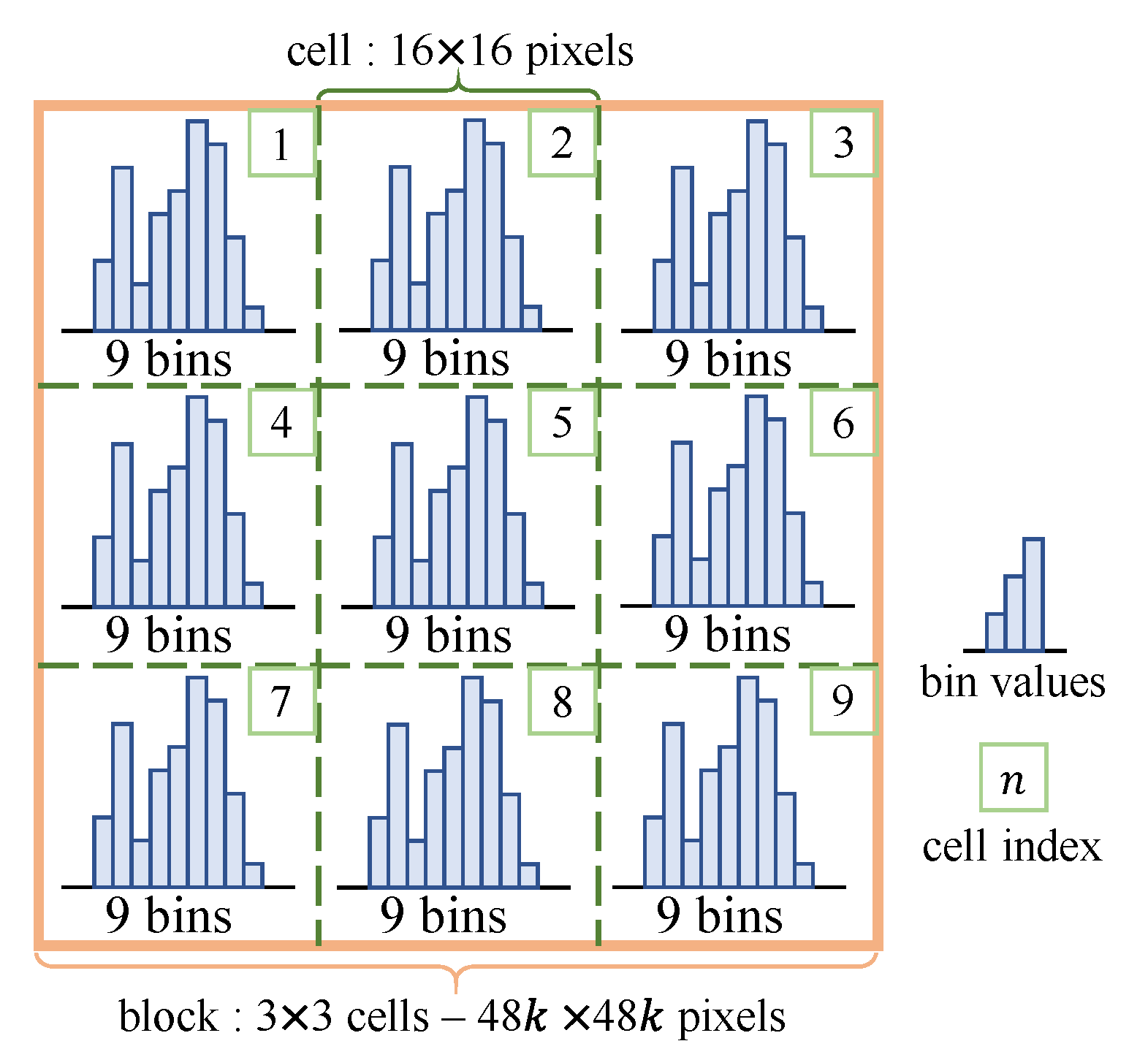
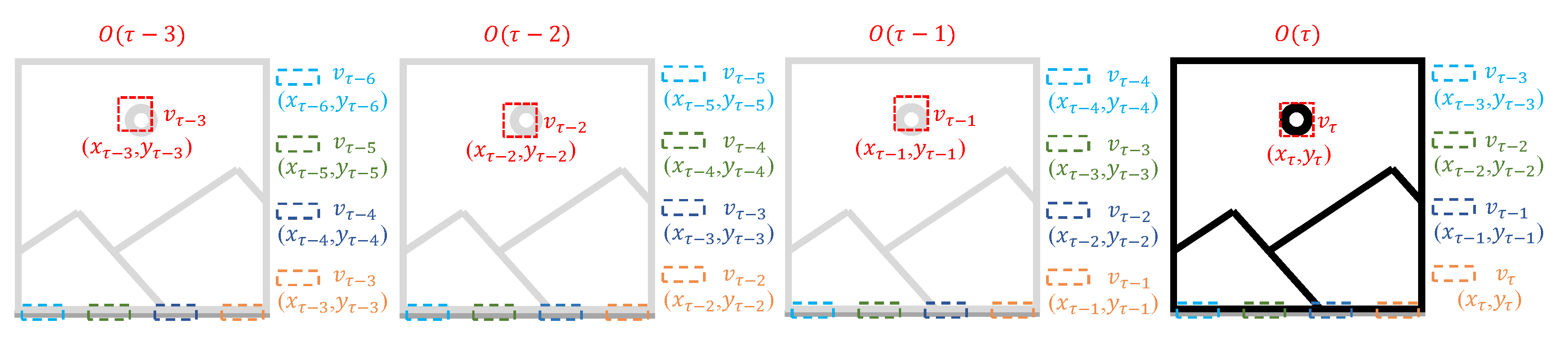
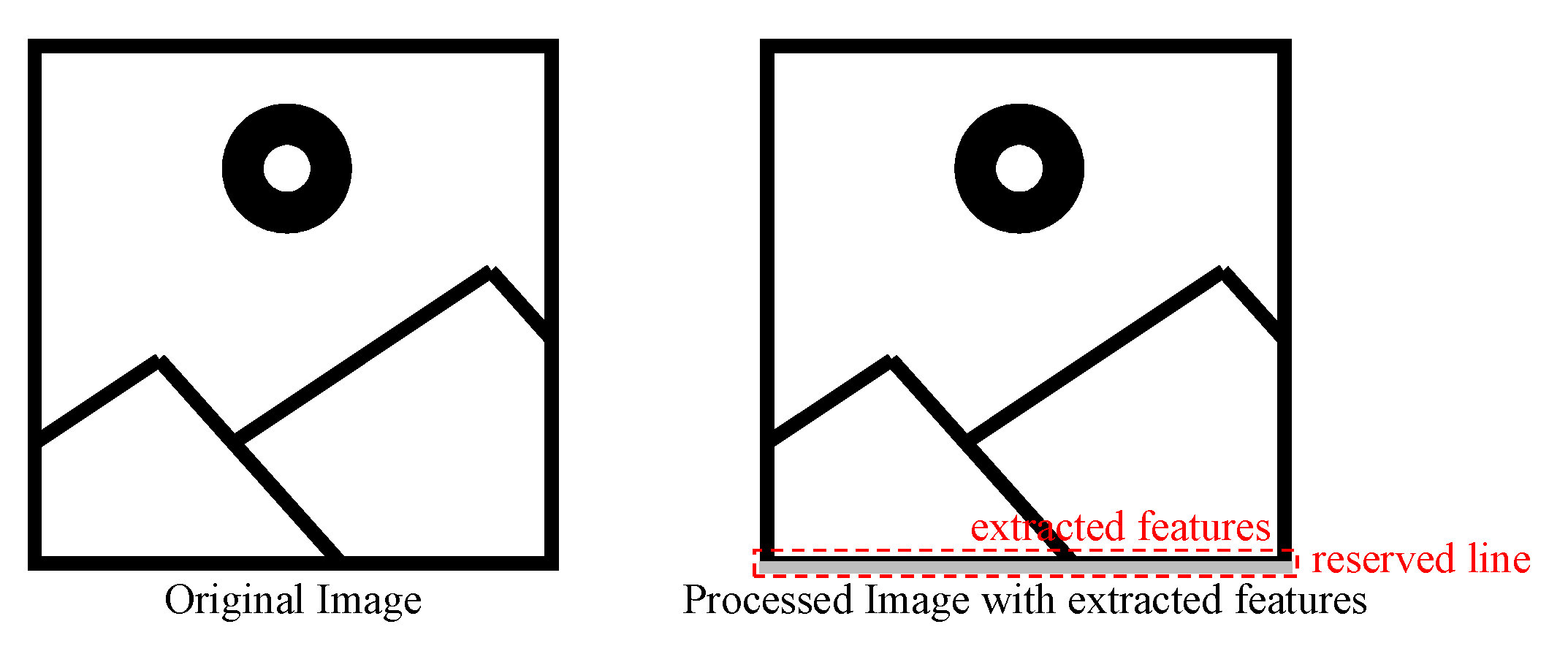
3.2. Proposed HOG Descriptor
4. Implementation
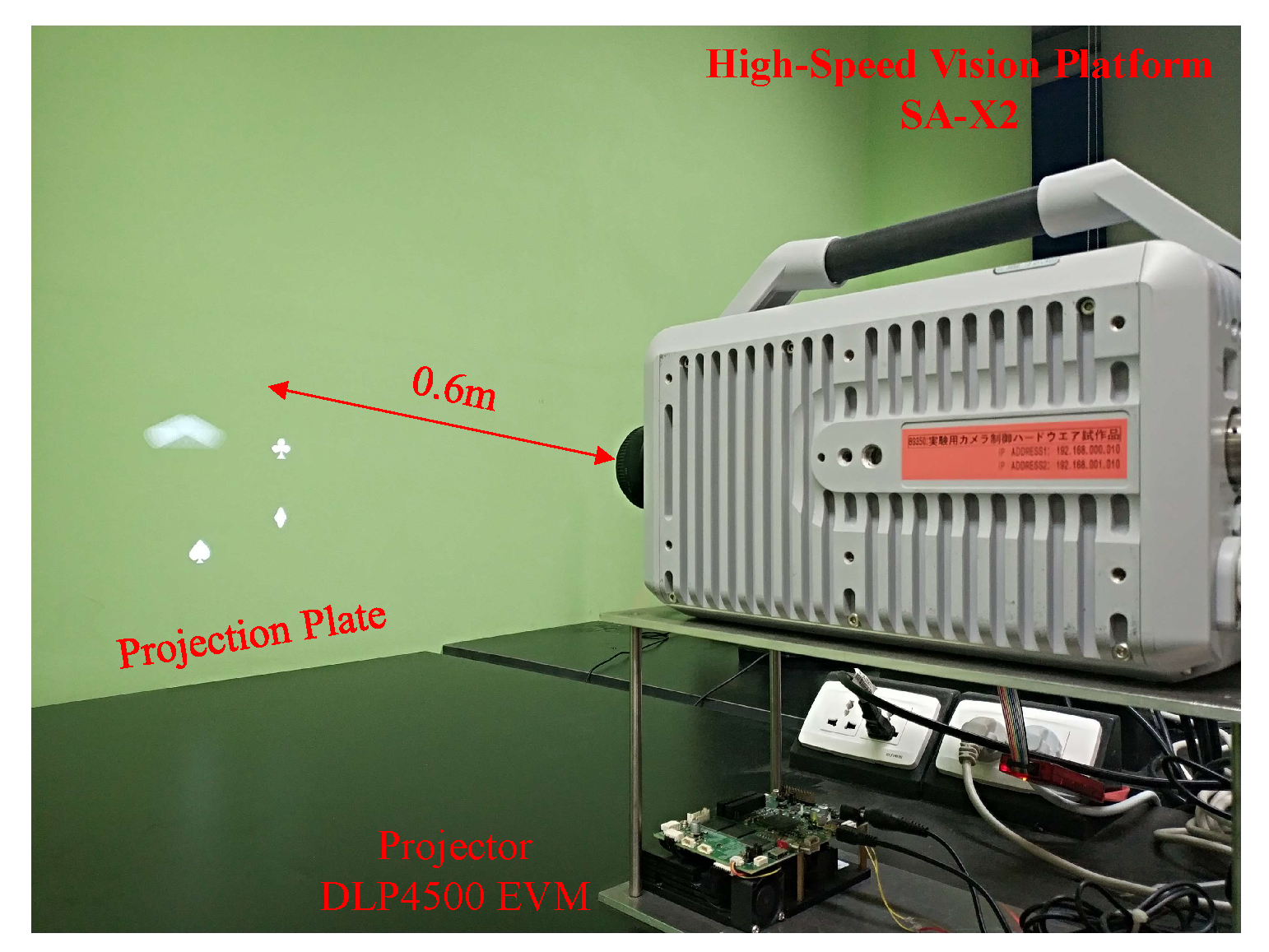
4.1. Hardware Platform
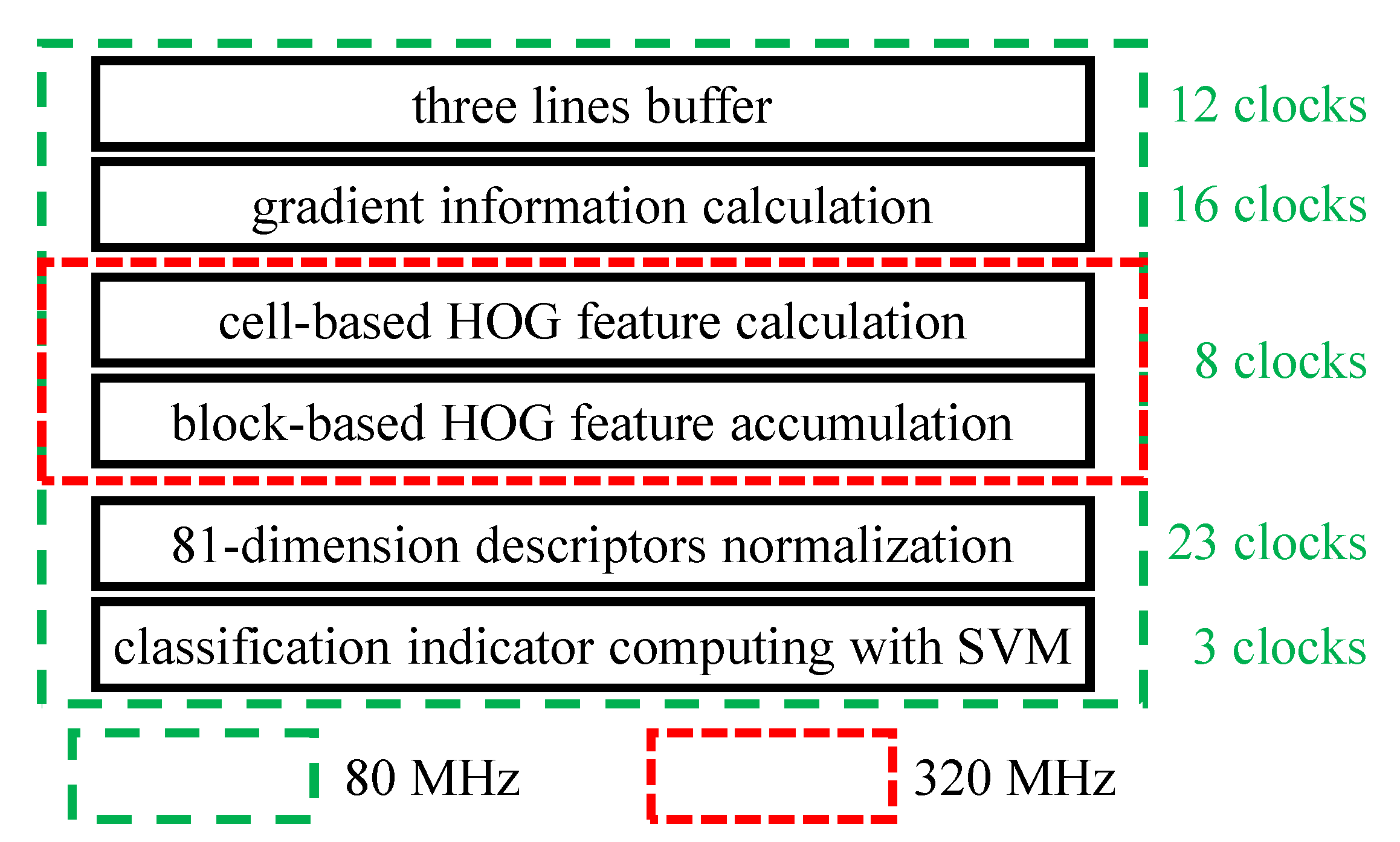
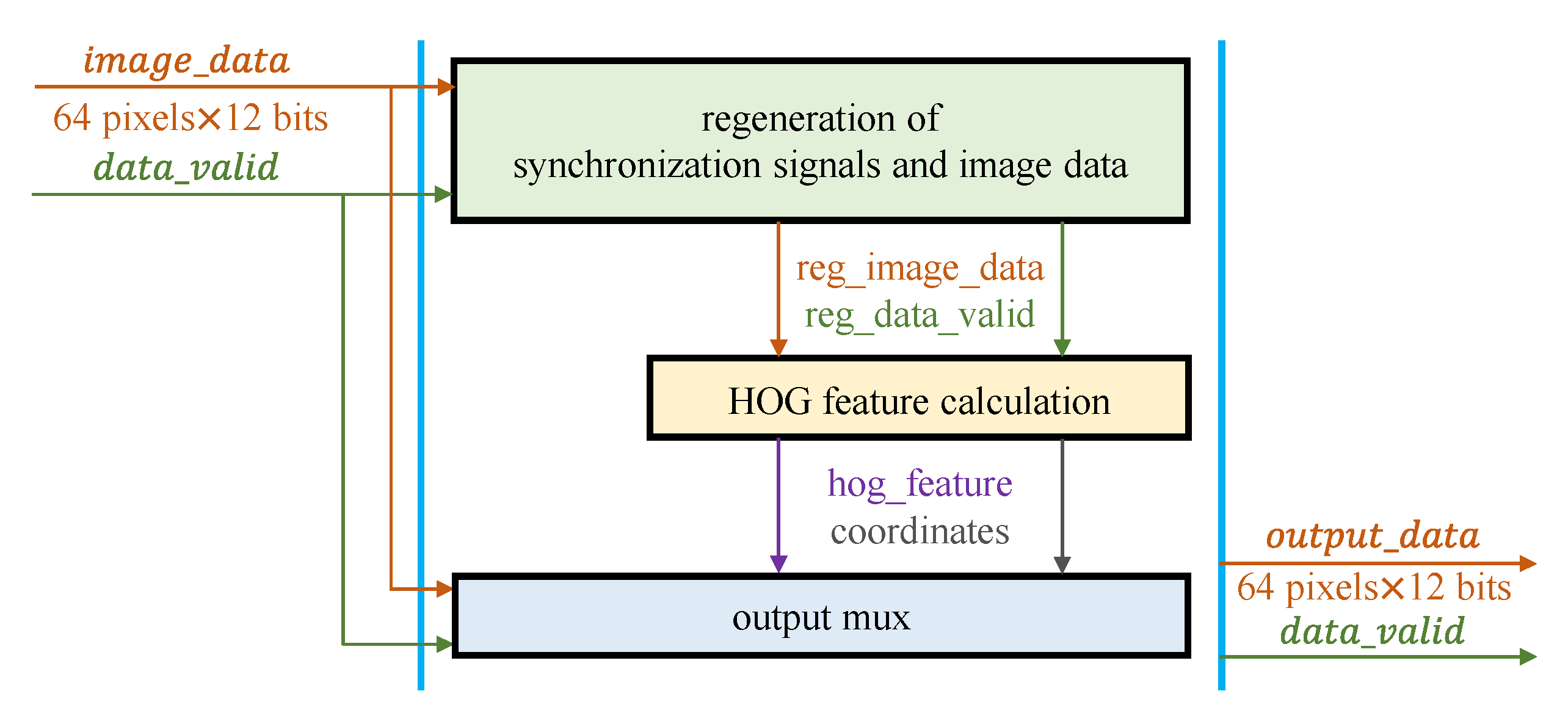
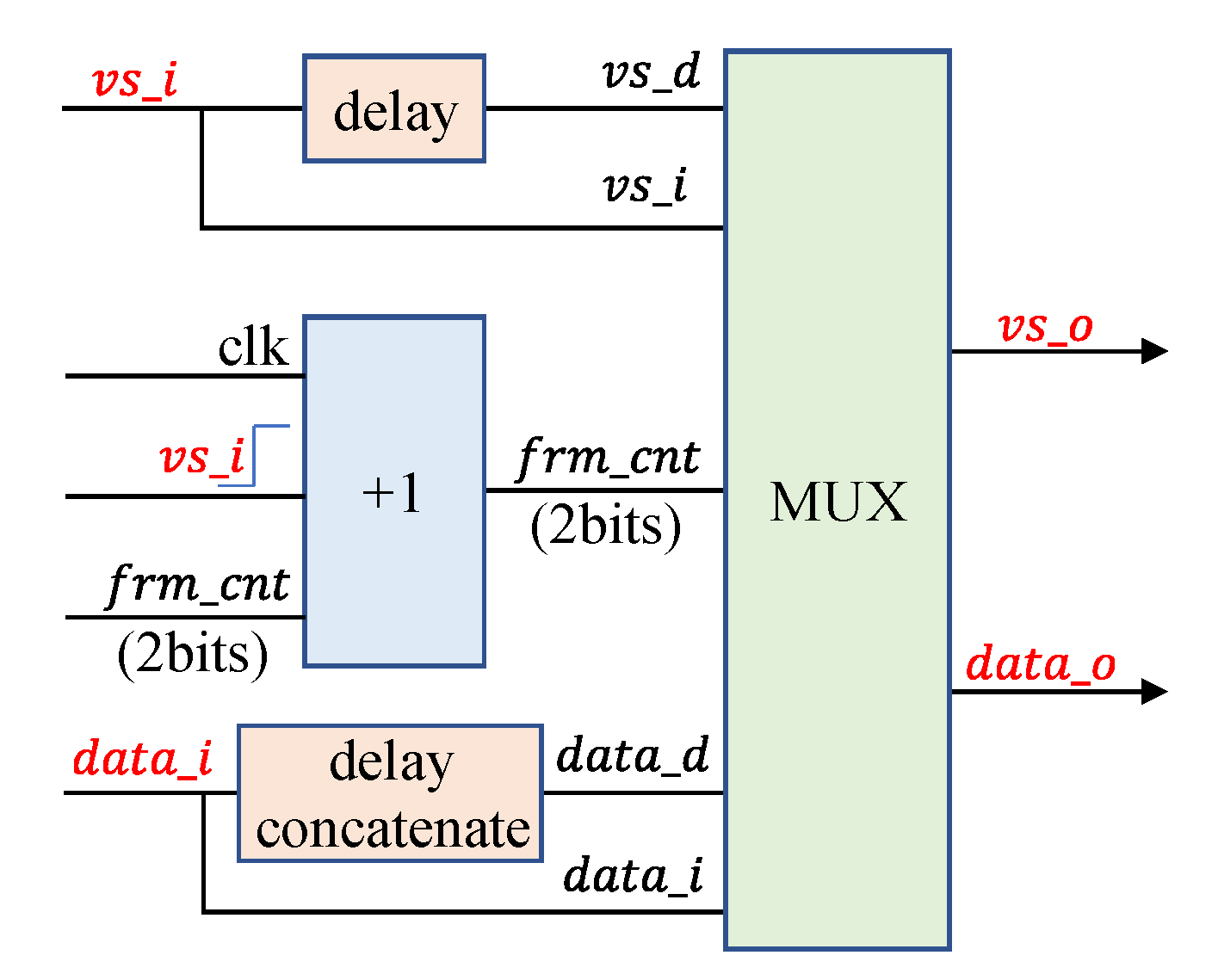
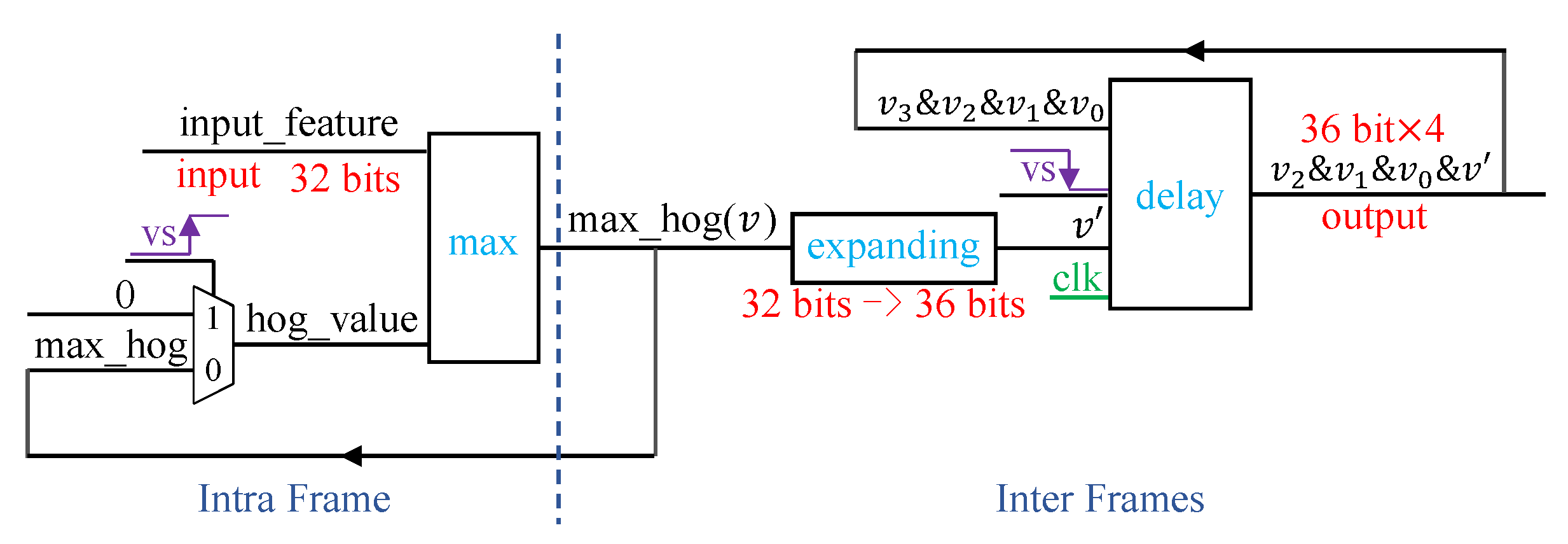
4.2. Hardware Implementation
5. Evaluation
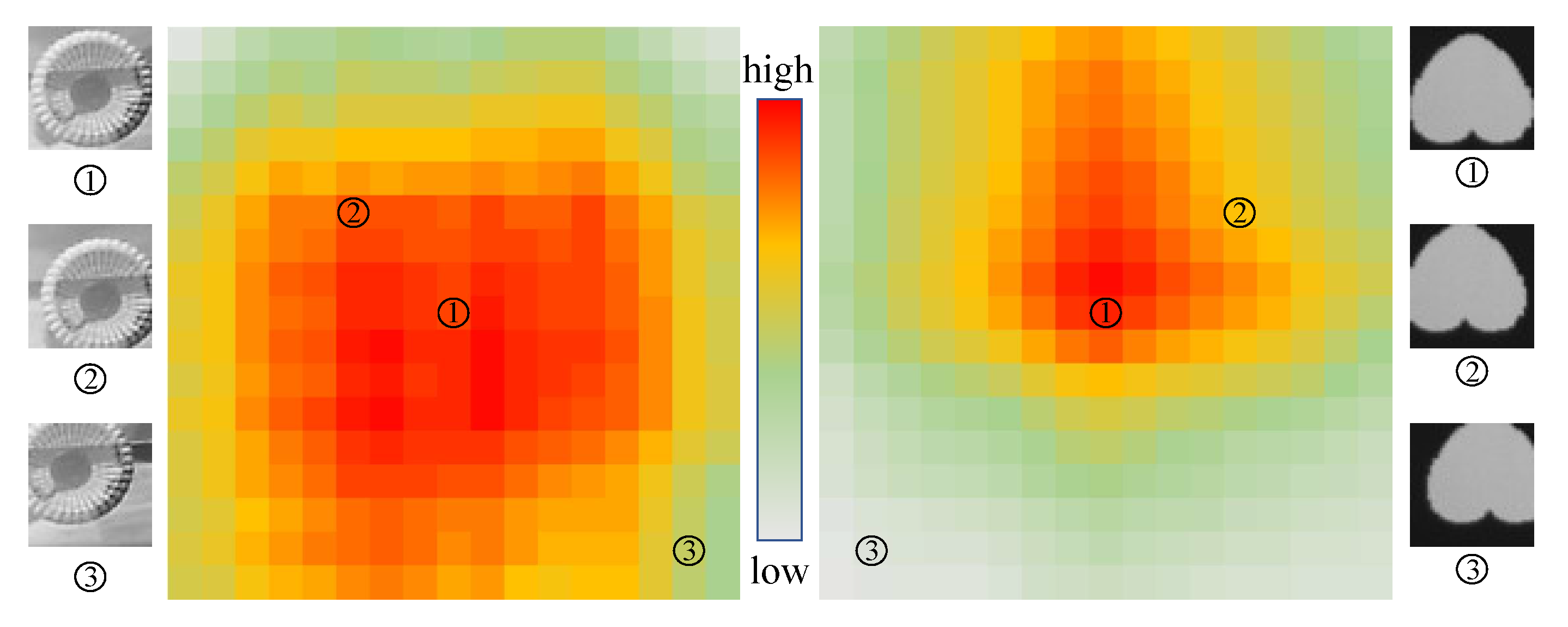
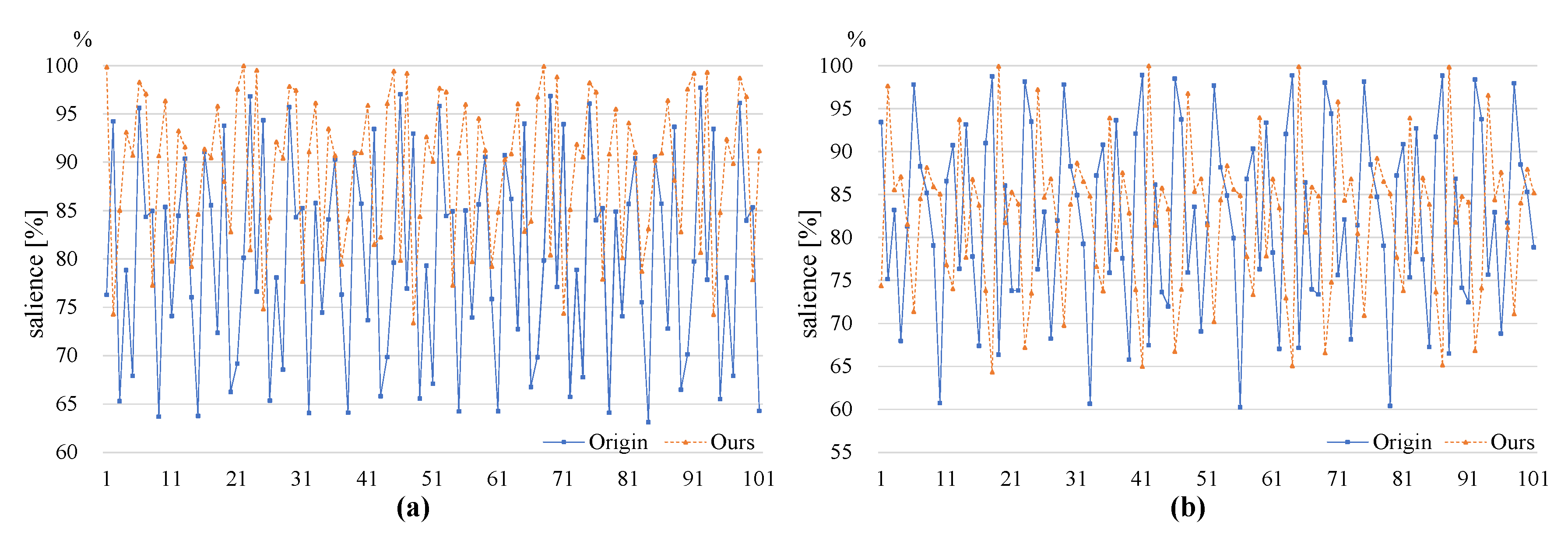
5.1. Salience Analysis
5.2. Resource Consumption
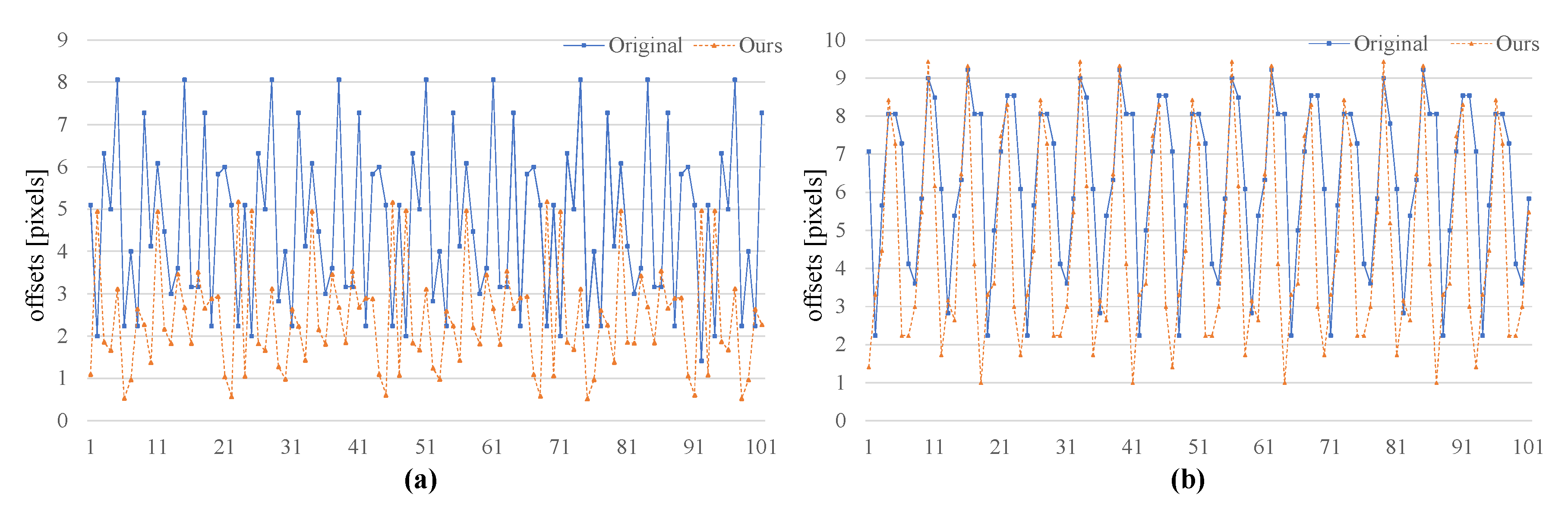
5.3. Performance Evaluation
6. Experiments
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Chen, B.; Huang, S. An advanced moving object detection algorithm for automatic traffic monitoring in real-world limited bandwidth networks. IEEE Trans. Multimed. 2014, 16, 837–847. [Google Scholar] [CrossRef]
- Chen, B.; Shi, L.; Ke, X. A Robust Moving Object Detection in Multi-Scenario Big Data for Video Surveillance. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 982–995. [Google Scholar] [CrossRef]
- Chen, X.; Chen, B.; Guan, J.; Huang, Y.; He, Y. Space-range-Doppler focus-based low-observable moving target detection using frequency diverse array MIMO radar. IEEE Access 2018, 43892–43904. [Google Scholar] [CrossRef]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. Brief: Binary Robust Independent Elementary Features, European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, realtime object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv Preprint 2018, arXiv:1804.02767. [Google Scholar]
- Sharma, A.; Shimasaki, K.; Gu, Q.; Chen, J.; Aoyama, T.; Takaki, T.; Ishii, I.; Tamura, K.; Tajima, K. Super high-speed vision platform for processing 1024 × 1024 images in real time at 12,500 fps. In Proceedings of the International Symposium on System Integration, Sapporo, Japan, 13–15 December 2016; pp. 544–549. [Google Scholar]
- Makantasis, K.; Nikitakis, A.; Doulamis, A.D.; Doulamis, N.D.; Papaefstathiou, I. Data-driven background subtraction algorithm for in-camera acceleration in thermal imagery. IEEE Trans. Circuits Syst. Video Technol. 2017, 18, 2090–2104. [Google Scholar] [CrossRef]
- Rodriguez-Gomez, R.; Fernandez-Sanchez, E.J.; Diaz, J.; Ros, E. FPGA implementation for real-time background subtraction based on horprasert model. Sensors 2012, 12, 585–611. [Google Scholar] [CrossRef] [PubMed]
- Acevedo-Avila, R.; Gonzalez-Mendoza, M.; Garcia-Garcia, A. A linked list-based algorithm for blob detection on embedded vision-based sensors. Sensors 2016, 16, 782. [Google Scholar] [CrossRef]
- Li, J.; Yin, Y.; Liu, X.; Xu, D.; Gu, Q. 12,000-fps Multi-object detection using HOG descriptor and SVM classifier. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5928–5933. [Google Scholar]
- Li, J.; Liu, X.; Liu, F.; Xu, D.; Gu, Q.; Ishii, I. A Hardware-Oriented Algorithm for Ultra-High-Speed Object Detection. IEEE Sens. J. 2019, 19, 3818–3831. [Google Scholar] [CrossRef]
- Gu, Q.; Takeshi, T.; Idaku, I. Fast FPGA-based multiobject feature extraction. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 30–45. [Google Scholar] [CrossRef]
- Bauer, S.; Brunsmann, U.; Schlotterbeck-Macht, S. FPGA implementation of a HOG-based pedestrian recognition system. In Proceedings of the MPC-Workshop, Karlsruhe, Germany, 10 July 2009; pp. 49–58. [Google Scholar]
- Kadota, R.; Sugano, H.; Hiromoto, M.; Ochi, H.; Miyamoto, R.; Nakamura, Y. Hardware architecture for HOG feature extraction. In Proceedings of the Fifth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kyoto, Japan, 12–14 September 2009; pp. 1330–1333. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems 25 (NIPS 2012), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems 28 (NIPS 2015), Montreal, QC, Canada, 7–10 December 2015; pp. 91–99. [Google Scholar]
- Uijlings, J.R.R.; Van De Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Shen, Y.; Ferdman, M.; Milder, P. Overcoming resource underutilization in spatial CNN accelerators. In Proceedings of the 2016 26th International Conference on Field Programmable Logic and Applications (FPL), Lausanne, Switzerland, 29 August–2 September 2016; pp. 1–4. [Google Scholar]
- Zhao, R.; Niu, X.; Wu, Y.; Luk, W.; Liu, Q. Optimizing CNN-based object detection algorithms on embedded FPGA platforms. In Proceedings of the International Symposium on Applied Reconfigurable Computing, Delft, The Netherlands, 3–7 April 2017; pp. 255–267. [Google Scholar]
- Gu, Q.; Ishii, I. Review of some advances and applications in real-time high-speed vision: Our views and experiences. Int. J. Autom. Comput. 2016, 13, 305–318. [Google Scholar] [CrossRef]
- Ishii, I.; Tatebe, T.; Gu, Q.; Takaki, T. Color-histogram-based tracking at 2000 fps. J. Electron. Imaging 2012, 21, 013010. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Ours | [16] | Total Resource | Percent (Ours) |
|---|---|---|---|---|
| 4-input LUTs | 320,665 | 313,349 | 524,160 | 61.18% |
| Registers | 96,822 | 89,260 | 232,960 | 41.56% |
| M9K blocks | 860 | 859 | 936 | 91.88% |
| M144K blocks | 36 | 36 | 36 | 100.00% |
| Embedded Mems (kbit) | 9593 | 9637 | 20,726 | 46.28% |
| MULT18×18 | 268 | 268 | 832 | 32.21% |
| Module | 4-input LUTs | Register | Memory Bits | Multipliers |
|---|---|---|---|---|
| -signal regeneration | 3183 | 2638 | 0 | 0 |
| Lines Buffer | 7338 | 5920 | 0 | 0 |
| Gradient Calculation | 127,762 | 26,556 | 0 | 128 |
| Up-Clocking | 983 | 574 | 8064 | 0 |
| Cell-based HOG Feature | 14,534 | 5568 | 0 | 0 |
| Block-based HOG feature | 31,067 | 21,353 | 0 | 0 |
| Normalization | 77,583 | 11,899 | 39,590 | 0 |
| SVM Classification | 4126 | 2236 | 0 | 108 |
| Total | 266,023 | 77,845 | 47,654 | 236 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, X.; Hu, S.; Hu, Y.; Gu, Q.; Ishii, I. An FPGA-Based Ultra-High-Speed Object Detection Algorithm with Multi-Frame Information Fusion. Sensors 2019, 19, 3707. https://doi.org/10.3390/s19173707
Long X, Hu S, Hu Y, Gu Q, Ishii I. An FPGA-Based Ultra-High-Speed Object Detection Algorithm with Multi-Frame Information Fusion. Sensors. 2019; 19(17):3707. https://doi.org/10.3390/s19173707
Chicago/Turabian StyleLong, Xianlei, Shenhua Hu, Yiming Hu, Qingyi Gu, and Idaku Ishii. 2019. "An FPGA-Based Ultra-High-Speed Object Detection Algorithm with Multi-Frame Information Fusion" Sensors 19, no. 17: 3707. https://doi.org/10.3390/s19173707
APA StyleLong, X., Hu, S., Hu, Y., Gu, Q., & Ishii, I. (2019). An FPGA-Based Ultra-High-Speed Object Detection Algorithm with Multi-Frame Information Fusion. Sensors, 19(17), 3707. https://doi.org/10.3390/s19173707