Agreement Analysis between Vive and Vicon Systems to Monitor Lumbar Postural Changes

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Motion Capture Systems
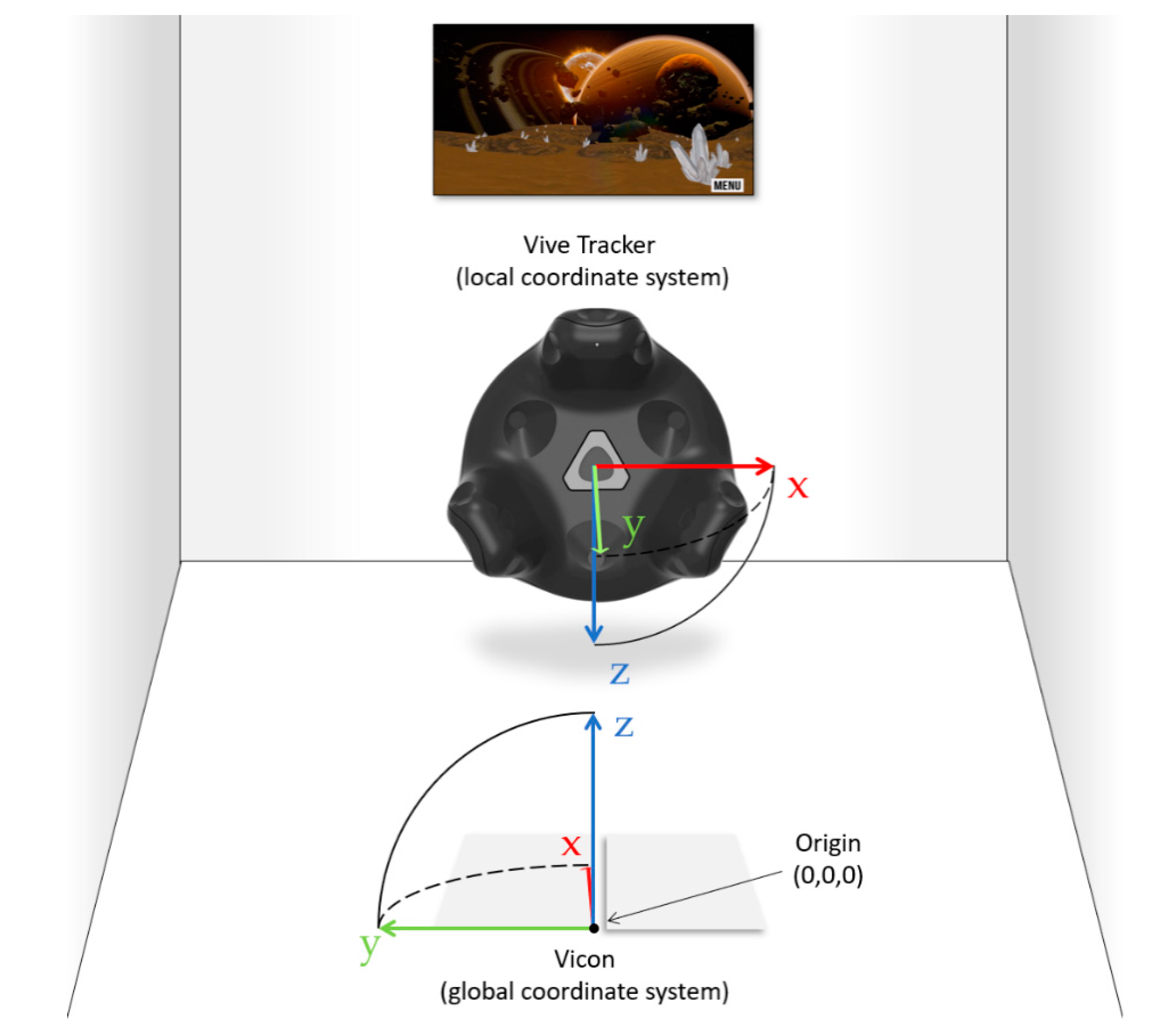
2.1.1. Vive System
2.1.2. Vicon System
2.2. Immersive Virtual Reality Environment
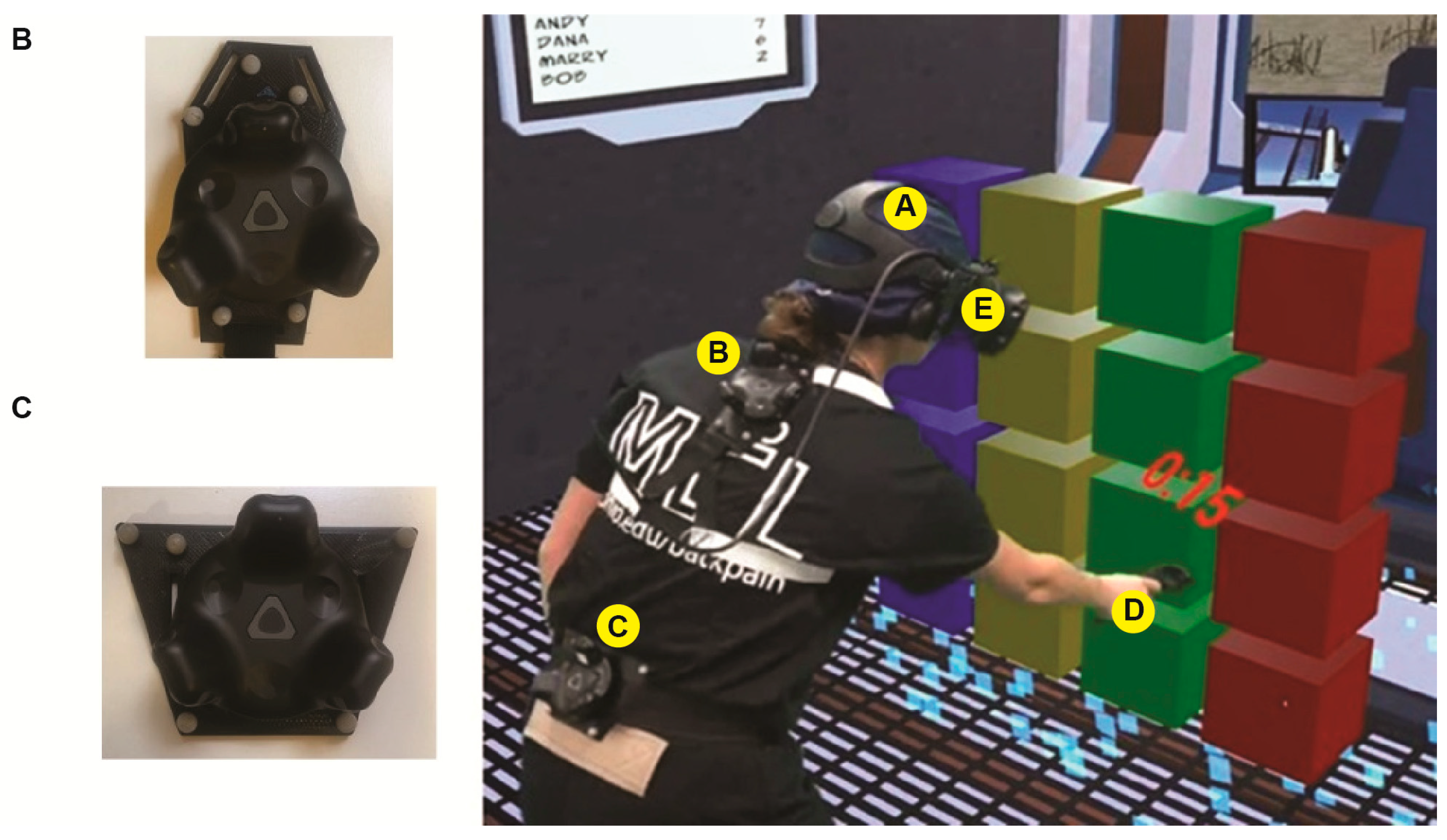
2.3. Measurement Set Up
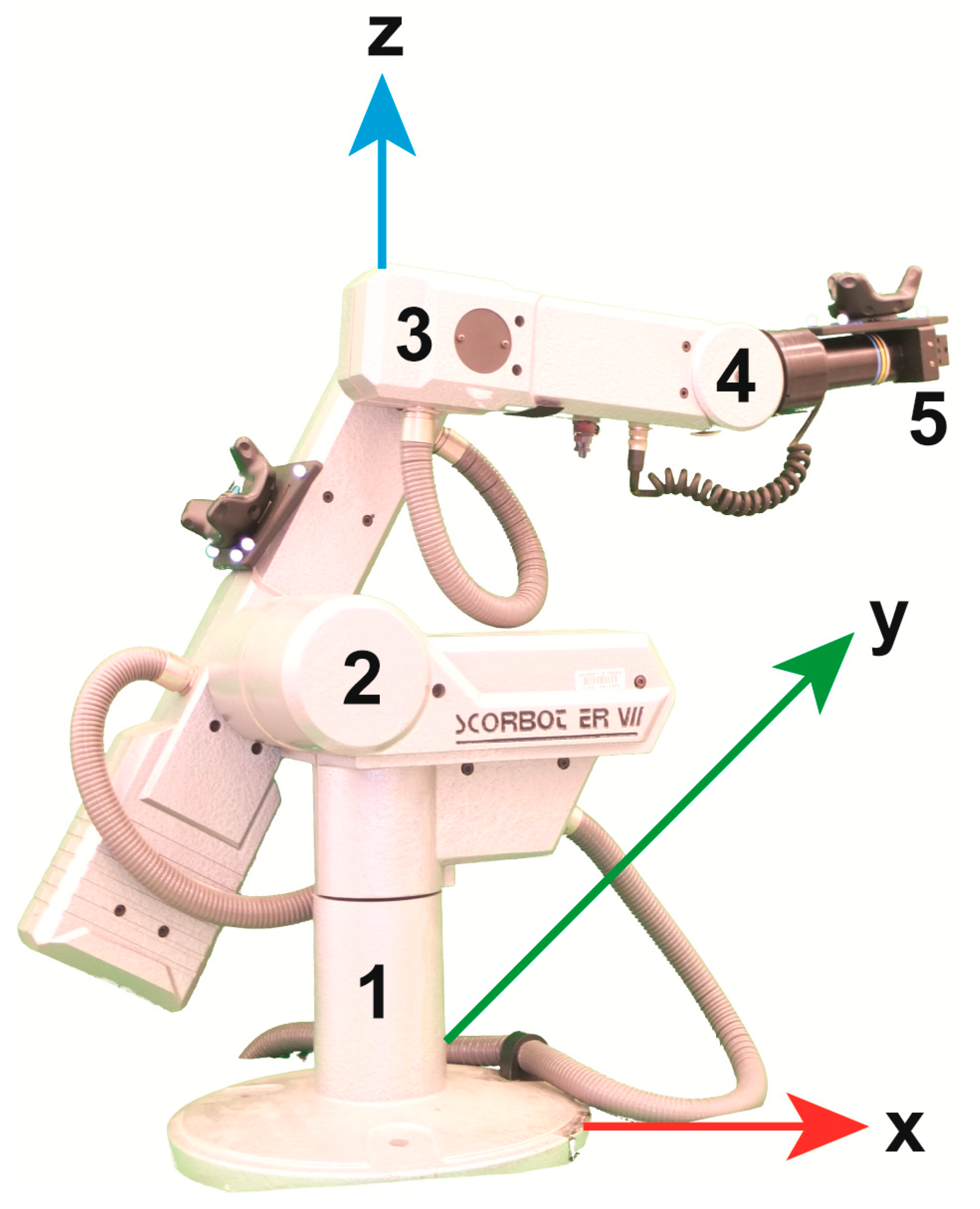
2.4. Robot Instrumentation
2.5. Participants
2.6. Procedure
2.7. Outcomes
2.8. Data Collection
2.9. Statistical Analysis
3. Results
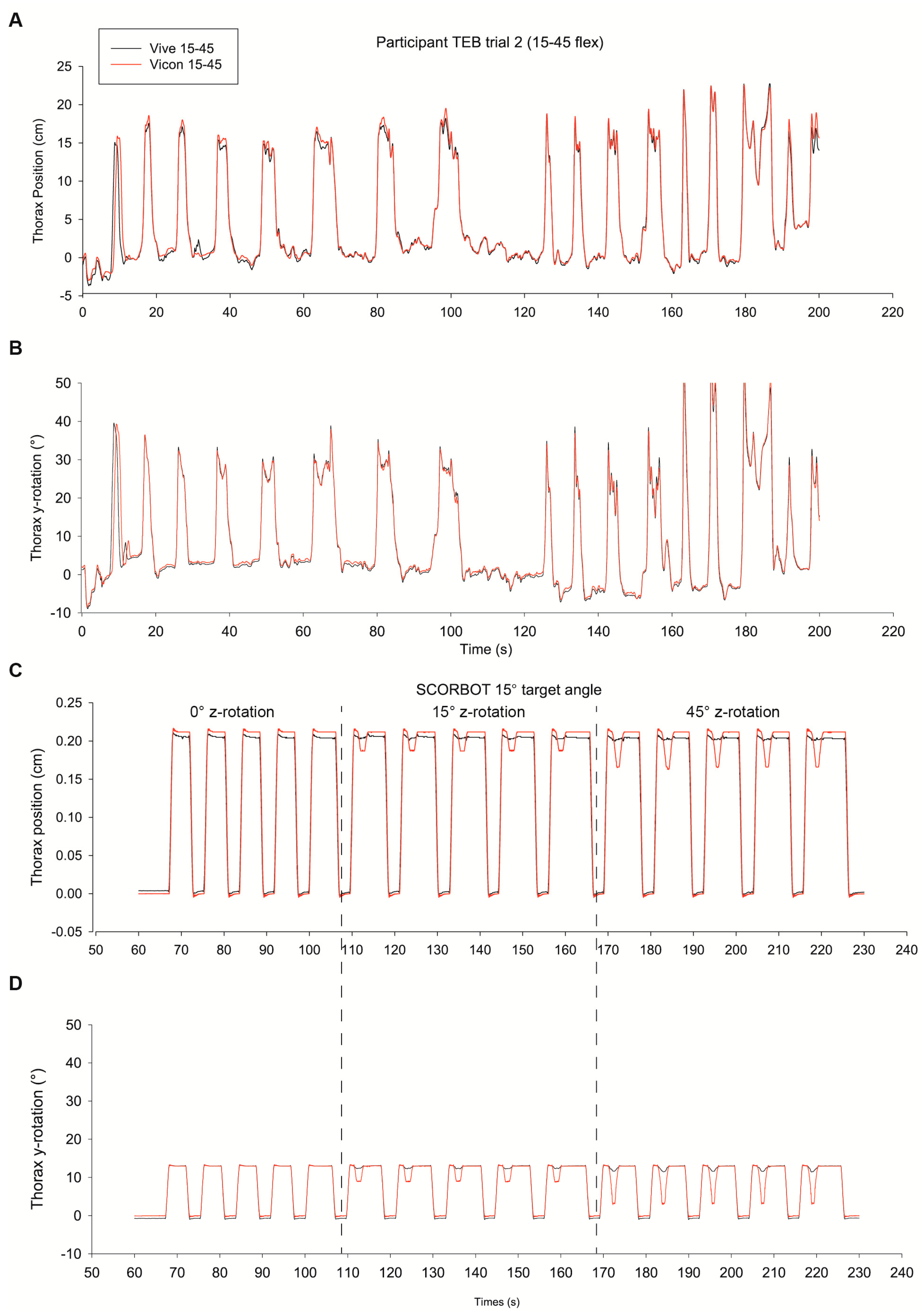
3.1. Position
3.2. Orientation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shibata, T. Head mounted display. Displays 2002, 23, 57–64. [Google Scholar] [CrossRef]
- Creagh, H. Cave Automatic Virtual Environment. In Proceedings of the Electrical Insulation Conference and Electrical Manufacturing and Coil Winding Technology Conference Cat. No. 03CH37480, Indianapolis, IN, USA, 25–25 September 2003; pp. 499–504. [Google Scholar]
- Rungta, A.; Rewkowski, N.; Klatzky, R.; Lin, M.; Manocha, D. Effects of virtual acoustics on dynamic auditory distance perception. J. Acoust. Soc. Am. 2017, 141, EL427–EL432. [Google Scholar] [CrossRef] [PubMed]
- Zaunschirm, M.; Schörkhuber, C.; Höldrich, R. Binaural rendering of Ambisonic signals by head-related impulse response time alignment and a diffuseness constraint. J. Acoust. Soc. Am. 2018, 143, 3616–3627. [Google Scholar] [CrossRef] [PubMed]
- Mansor, N.N.; Jamaluddin, M.H.; Zaki Shukor, A. CONCEPT AND APPLICATION OF VIRTUAL REALITY HAPTIC TECHNOLOGY: A REVIEW. J. Theor. Appl. Inf. Technol. 2017, 31. [Google Scholar]
- Dimbwadyo-Terrer, I.; Trincado-Alonso, F.; de los Reyes-Guzmán, A.; Aznar, M.A.; Alcubilla, C.; Pérez-Nombela, S.; del Ama-Espinosa, A.; Polonio-López, B.; Gil-Agudo, Á. Upper limb rehabilitation after spinal cord injury: A treatment based on a data glove and an immersive virtual reality environment. Disabil. Rehabil. Assist. Technol. 2016, 11, 462–467. [Google Scholar] [CrossRef] [PubMed]
- Aiple, M.; Schiele, A. Pushing the limits of the CyberGrasp for haptic rendering. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3541–3546. [Google Scholar]
- VAQSOInc. Scent Device for VR. Available online: https://vaqso.com (accessed on 8 September 2019).
- FeelrealInc. Available online: https://feelreal.com/. (accessed on 8 September 2019).
- Keio-NUS CUTE Center. Taste+. Available online: http://cutecenter.nus.edu.sg/projects/taste+.html. (accessed on 8 September 2019).
- Ranasinghe, N.; Tram Nguyen, N.; Liangkun, Y.; Lin, L.-Y.; Tolley, D.; Yi-Luen Do, E. Vocktail: A Virtual Cocktail for Pairing Digital Taste, Smell, and Color Sensations. In Proceedings of the 25th ACM international conference on Multimedia, Mountain View, CA, USA, 23–27 October 2017. [Google Scholar]
- Project Nourished. Heighten Sensation of Food and Medicine. Available online: http://www.projectnourished.com (accessed on 8 September 2019).
- Grand View Research Inc. Augmented Reality (AR) & Virtual Reality (VR) in Healthcare Market Analysis By Component (Hardware, Software, and Service), By Technology (Augmented Reality, Virtual Reality), And Segment Forecasts 2018–2025; Market Research Report; Grand View Research, Inc.: San Francisco, CA, USA, 2017. [Google Scholar]
- Lin, H.-T.; Li, Y.-I.; Hu, W.-P.; Huang, C.-C.; Du, Y.-C.; Lin, H.-T.; Li, Y.-I.; Hu, W.-P.; Huang, C.-C.; Du, Y.-C. A Scoping Review of The Efficacy of Virtual Reality and Exergaming on Patients of Musculoskeletal System Disorder. J. Clin. Med. 2019, 8, 791. [Google Scholar] [CrossRef]
- Collado-Mateo, D.; Merellano-Navarro, E.; Olivares, P.R.; García-Rubio, J.; Gusi, N. Effect of exergames on musculoskeletal pain: A systematic review and meta-analysis. Scand. J. Med. Sci. Sports 2018, 28, 760–771. [Google Scholar] [CrossRef]
- Austin, P.D.; Siddall, P.J. Virtual reality for the treatment of neuropathic pain in people with spinal cord injuries: A scoping review. J. Spinal Cord Med. 2019, 1–11. [Google Scholar] [CrossRef]
- Scapin, S.; Echevarría-Guanilo, M.E.; Boeira Fuculo Junior, P.R.; Gonçalves, N.; Rocha, P.K.; Coimbra, R. Virtual Reality in the treatment of burn patients: A systematic review. Burns 2018, 44, 1403–1416. [Google Scholar] [CrossRef]
- Mallari, B.; Spaeth, E.K.; Goh, H.; Boyd, B.S. Virtual reality as an analgesic for acute and chronic pain in adults: a systematic review and meta-analysis. J. Pain Res. 2019, 12, 2053–2085. [Google Scholar] [CrossRef]
- Botella, C.; Fernández-Álvarez, J.; Guillén, V.; García-Palacios, A.; Baños, R. Recent Progress in Virtual Reality Exposure Therapy for Phobias: A Systematic Review. Curr. Psychiatry Rep. 2017, 19, 42. [Google Scholar] [CrossRef] [PubMed]
- Maples-Keller, J.L.; Yasinski, C.; Manjin, N.; Rothbaum, B.O. Virtual Reality-Enhanced Extinction of Phobias and Post-Traumatic Stress. Neurotherapeutics 2017, 14, 554–563. [Google Scholar] [CrossRef] [PubMed]
- Reger, G.M.; Koenen-Woods, P.; Zetocha, K.; Smolenski, D.J.; Holloway, K.M.; Rothbaum, B.O.; Difede, J.A.; Rizzo, A.A.; Edwards-Stewart, A.; Skopp, N.A.; et al. Randomized controlled trial of prolonged exposure using imaginal exposure vs. virtual reality exposure in active duty soldiers with deployment-related posttraumatic stress disorder (PTSD). J. Consult. Clin. Psychol. 2016, 84, 946–959. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.S.; Park, Y.J.; Park, S.W. The Effects of Virtual Reality Training on Function in Chronic Stroke Patients: A Systematic Review and Meta-Analysis. Biomed Res. Int. 2019, 2019, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Ahn, S.; Hwang, S. Virtual rehabilitation of upper extremity function and independence for stoke: A meta-analysis. J. Exerc. Rehabil. 2019, 15, 358. [Google Scholar] [CrossRef] [PubMed]
- Aida, J.; Chau, B.; Dunn, J. Immersive virtual reality in traumatic brain injury rehabilitation: A literature review. NeuroRehabilitation 2018, 42, 441–448. [Google Scholar] [CrossRef] [PubMed]
- Cappozzo, A.; Della Croce, U.; Leardini, A.; Chiari, L. Human movement analysis using stereophotogrammetry. Part 1: Theoretical background. Gait Posture 2005. [Google Scholar]
- Clark, B.C.; Russ, D.W.; Nakazawa, M.; France, C.R.; Walkowski, S.; Law, T.D.; Applegate, M.; Mahato, N.; Lietkam, S.; Odenthal, J.; et al. A randomized control trial to determine the effectiveness and physiological effects of spinal manipulation and spinal mobilization compared to each other and a sham condition in patients with chronic low back pain: Study protocol for The RELIEF Study. Contemp. Clin. Trials 2018, 70, 41–52. [Google Scholar] [CrossRef] [PubMed]
- Thomas, J.S.; Gibson, G.E. Coordination and timing of spine and hip joints during full body reaching tasks. Hum. Mov. Sci. 2007, 26, 124–140. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Trost, Z.; France, C.R.; Thomas, J.S. Exposure to movement in chronic back pain: Evidence of successful generalization across a reaching task. Pain 2008, 137, 26–33. [Google Scholar] [CrossRef]
- Windolf, M.; Götzen, N.; Morlock, M. Systematic accuracy and precision analysis of video motion capturing. J. Biomech. 2008. [Google Scholar] [CrossRef] [PubMed]
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A study of vicon system positioning performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef] [PubMed]
- Niehorster, D.C.; Li, L.; Lappe, M. The accuracy and precision of position and orientation tracking in the HTC vive virtual reality system for scientific research. Iperception 2017, 8, 204166951770820. [Google Scholar] [CrossRef] [PubMed]
- Borges, M.; Symington, A.; Coltin, B.; Smith, T.; Ventura, R. HTC Vive: Analysis and Accuracy Improvement. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2610–2615. [Google Scholar]
- Luckett, E. A Quantitative Evaluation of the HTC Vive for Virtual Reality Research. Ph.D. Thesis, The University of Mississippi, Oxford, MI, USA, 2018. [Google Scholar]
- Corporation, V. SteamTrackingHDK. Available online: https://steamcommunity.com/games/steamvrtracking/announcements/detail/1264796421606498053 (accessed on 6 May 2018).
- Thomas, J.S.; Corcos, D.M.; Hasan, Z. Kinematic and Kinetic Constraints on Arm, Trunk, and Leg Segments in Target-Reaching Movements. J. Neurophysiol. 2004, 93, 352–364. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 1992; ISBN 0521431085. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Vive | Vicon |
|---|---|---|
| Tracking system for lumbar motion | 2 infrared laser lighthouses 2 Vive trackers (HTC America, Inc., Seattle, WA, USA) | 10 Bonita 10 infrared cameras 10 light reflective markers mounted on 2 3D printed plates (Vicon Motion Systems Ltd., Oxford, UK) |
| Platform software | Steam VR (Valve Corporation, Washington, DC, USA). | Tracker version 3.4 (Vicon Motion Systems Ltd., Oxford, UK) |
| Motion capture software | Unity 2019.2.6f1 (Unity Technologies, California, CA, USA) | Motion Monitor (Innovative Sports Training, Chicago, IL, USA). |
| Sampling rate (Hz) | 58–100 | 100 |
| Latency (ms) | 22 | 20 |
| 3D parameter | Euler angle (x, y, z) | Euler angle (y, z, x) |
| ID | Sex | Age | Weight (Kg) | Height (m) | BMI |
|---|---|---|---|---|---|
| 1 | F | 24 | 59 | 1.60 | 23 |
| 2 | F | 23 | 81 | 1.68 | 29 |
| 3 | M | 25 | 82 | 1.75 | 27 |
| 4 | M | 22 | 77 | 1.89 | 22 |
| 5 | F | 41 | 90 | 1.68 | 32 |
| 6 | F | 22 | 57 | 1.68 | 20 |
| 7 | M | 30 | 59 | 1.70 | 20 |
| Mean | 72.14 | 72.14 | 1.71 | 24.71 | |
| STD | 6.87 | 13.50 | 0.09 | 4.68 |
| ID | Sacrum | Thorax | ||||||
|---|---|---|---|---|---|---|---|---|
| Position (mm) | Rotation (°) | Position (mm) | Rotation (°) | |||||
| Mean | STD | Mean | STD | Mean | STD | Mean | STD | |
| SCORBOT_0 | 0.02 | 0.00 | 1.65 | 0.52 | 0.02 | 0.02 | 1.21 | 0.34 |
| SCORBOT_15 | 0.02 | 0.00 | 1.47 | 0.38 | 0.02 | 0.01 | 1.62 | 0.16 |
| SCORBOT_30 | 0.02 | 0.01 | 1.47 | 0.37 | 0.03 | 0.02 | 2.56 | 0.77 |
| Participants | 0.67 | 0.69 | 1.18 | 0.33 | 1.74 | 0.96 | 1.98 | 0.54 |
| average | 0.18 | 0.61 | 1.44 | 0.39 | 0.45 | 1.07 | 1.84 | 0.65 |
| ID | 15° | 30° | 45° | 60° | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | STD | Mean | STD | Mean | STD | Mean | STD | |
| 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.02 | 0.00 | 0.01 | |
| SCORBOT_0 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.02 | 0.01 | 0.01 |
| SCORBOT_15 | 0.01 | 0.01 | 0.01 | 0.01 | −2.81 | 4.89 | 0.03 | 0.05 |
| SCORBOT_30 | −0.01 | 0.02 | −0.01 | 0.04 | 0.00 | 0.01 | 0.00 | 0.01 |
| Participants | ||||||||
| average | 0.01 | 0.02 | 0.00 | 0.03 | -0.52 | 2.12 | 0.01 | 0.02 |
| ∆ (Vicon-Vive) Orientation | ||||||||
| 0.38 | 0.59 | −0.23 | 0.42 | −0.37 | 0.40 | −0.08 | 0.48 | |
| SCORBOT_0 | 0.21 | 0.43 | −0.15 | 0.62 | −0.24 | 0.19 | −0.20 | 0.36 |
| SCORBOT_15 | −0.02 | 0.41 | −0.43 | 0.28 | −0.14 | 0.13 | −0.35 | 0.31 |
| SCORBOT_30 | −0.11 | 0.87 | 1.42 | 5.95 | 2.16 | 4.64 | −3.31 | 5.93 |
| Participants | ||||||||
| average | 0.06 | 0.66 | 0.06 | 0.66 | 0.14 | 4.68 | 0.81 | 3.19 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
van der Veen, S.M.; Bordeleau, M.; Pidcoe, P.E.; France, C.R.; Thomas, J.S. Agreement Analysis between Vive and Vicon Systems to Monitor Lumbar Postural Changes. Sensors 2019, 19, 3632. https://doi.org/10.3390/s19173632
van der Veen SM, Bordeleau M, Pidcoe PE, France CR, Thomas JS. Agreement Analysis between Vive and Vicon Systems to Monitor Lumbar Postural Changes. Sensors. 2019; 19(17):3632. https://doi.org/10.3390/s19173632
Chicago/Turabian Stylevan der Veen, Susanne M., Martine Bordeleau, Peter E. Pidcoe, Christopher R. France, and James S. Thomas. 2019. "Agreement Analysis between Vive and Vicon Systems to Monitor Lumbar Postural Changes" Sensors 19, no. 17: 3632. https://doi.org/10.3390/s19173632
APA Stylevan der Veen, S. M., Bordeleau, M., Pidcoe, P. E., France, C. R., & Thomas, J. S. (2019). Agreement Analysis between Vive and Vicon Systems to Monitor Lumbar Postural Changes. Sensors, 19(17), 3632. https://doi.org/10.3390/s19173632