1. Introduction
The research on Underwater Wireless Sensor Networks (UWSNs) has a wide application prospect in marine hydrological data collection, marine pollution detection, water quality monitoring [
1,
2,
3], etc. The coverage optimization of UWSNs has a great significance for the network’s capacity for information acquisition and environment perception, as well as its survivability/lifetime [
4]. In addition, the coverage effectiveness of UWSNs has a direct bearing on the properties of the network, such as its communication bandwidth and computation capacity, thus determining the quality of service to a certain extent [
5].
Existing research on coverage optimization mainly aims at ground sensor networks and can be classified into three categories: the target coverage [
6], the regional coverage [
7], and the barrier coverage [
8,
9,
10]. The target coverage requires that sensor networks can monitor target nodes. In regional coverage, any point inside the region must be covered by at least one active node. The barrier coverage studies the probability of detecting moving objects when they pass through the monitoring region. In [
6,
7,
10,
11,
12], a variety of coverage control methods were proposed, among which the Virtual-Force Algorithm (VFA) by Zou et al. [
7] has attracted considerate attention and is regarded as an effective method to solve the coverage problems in two-dimensional sensor networks. In practical applications, only some parts of the whole underwater area will be the Regions Of Interest (ROI). Observers usually expect the ROIs to be covered by more sensors (i.e.,
k-coverage) instead of only one sensor (i.e., one-coverage), so that more reliable and accurate sensing data of ROIs can be collected for further processing. In view of this, we define diverse
k-coverage as the coverage optimization problem in which the multiplicity of
k-coverage requirements in different regions is diverse. However, most of the algorithms above aim to solve the one-coverage problem rather than the
k-coverage problem of ROIs, even if the
k-coverage (
2) requirement is more practical in regional coverage of UWSNs.
In addition, typical coverage optimization utilizes a cloud-based centralized architecture. The data generated by underwater nodes is preprocessed and subsequently sent to cloud servers. The server can potentially receive huge data volumes from the large number of underwater nodes and generate significant load on the sensor network. This process will consume many computational resources and generate a certain time delay, which has a significant impact on coverage optimization. Edge computing [
13,
14,
15], a new paradigm that adds additional edge computing servers to low-powered devices and networks, plays an important role in coverage optimization because of its advantages in agility, intelligence, reliability, and real-time performance [
16,
17,
18]. Tasks of UWSNs can be fully or partly uploaded to the edge servers, and then, the edge servers return the computational results to the nodes for optimizing the coverage. For example, the anchor node can adjust the location of the node in real time according to the calculation result of edge servers. Meanwhile, few researchers have applied the virtual force algorithm to the diverse
k-coverage problems of UWSNs. Therefore, this motivates us to design an effective diverse
k-coverage algorithm based on VFA with a new computing architecture.
The main contributions of this paper are summarized as follows.
We analyze and derive the minimal number of sensor nodes needed to build a specific diverse k-coverage UWSN.
We design an enhanced virtual force algorithm k-ERVFA to solve the non-uniform k-coverage optimization problem of sub-regions with different interest levels in UWSNs.
We extend our proposed algorithm to special cases such as sensor sparse regions and time-variant situations.
The rest of this paper is organized as follows:
Section 2 summarizes related studies on sensor deployment methods of UWSNs and the
k-coverage problem of WSN. In
Section 3, we introduce the 3D-UWSNs model with different
k-coverage requirements. We then derive the minimal number of nodes needed to meet the specific
k-coverage requirement. In
Section 4, we give a detailed description of the
k-ERVFA algorithm. Simulation results are given in
Section 5. In
Section 6, we give discussions about simulation parameters and extend
k-ERVFA to special cases.
Section 7 concludes the whole paper.
4. The Enhanced Virtual-Force Algorithm -ERVFA
In this section, we propose the enhanced virtual force algorithm, i.e.,
k-ERVFA to solve the diverse
k-coverage problem of 3D UWSNs. The model of the sensor sphere with
k-equivalent radius (seen in
Section 3.2) is used to cover the entire 3D underwater area.
4.1. Repulsion between k-Conflicting Nodes Based on Coulomb’s Law
According to Coulomb’s Law, we define the
k-repulsion between two sensor nodes
i and
j as Equation (
15):
where
n is the total number of sensor nodes in the sensor network,
is the Euclidean distance between sensor node
i and sensor node
j,
is the
k-conflict radius (seen Definition 4 in
Section 3.2),
is the unit vector in the direction from
to
, and
is the coefficient of the Coulomb repulsion between nodes, which is a constant independent of the value of
k.
Note that for sub-regions with different
k-values, the only difference in Equation (
15) is
, which is
(seen in Definitions 3 and 4 in
Section 3.2). For greater
k values, both
and
are smaller, i.e., the repulsion exists only when the Euclidean distance between neighboring nodes is rather small (compared to cases with small
k values). A smaller distance between nodes means a higher volume density, which leads to a higher
k-coverage rate. This explains why the
k-equivalent radius was introduced and how it facilitates obtaining diverse
k-coverage.
In this algorithm, the k-repulsion between nodes was adopted to minimize the overlapping coverage area of neighboring nodes.
4.2. Attraction from the k-Coverage Requirement Sub-Regions
If there were only repulsion between nodes, sensor nodes would just disperse as far as possible so there will be coverage breaches between sensors; thus,
k-coverage will not be achieved. In an ideal deployment scheme, more sensor nodes should move towards sub-regions with
k-coverage (
) requirements to guarantee better
k-coverage. Therefore, we introduce the attraction from the
k-coverage requirement sub-regions on nodes to “pull in” more sensor nodes. In order to achieve diverse
k-coverage, the attraction coefficients of sub-regions with different
k-coverage requirements should differ. The attraction from a sub-region on nodes is considered as the attraction from the region’s centroid. For a given
k (
), the
k-attraction from the
k-coverage requirement sub-region on sensor
is:
where
is the attraction coefficient of the
k-coverage requirement sub-regions on sensor nodes and varies with different
k values and
is the equivalent distance between sensor
and the
k-coverage requirement region
(the
jth
k-coverage requirement sub-region for a given
k), which is considered as the Euclidean distance between
and the centroid of
:
The direction of is determined by the unit vector , which starts from and ends at the centroid of . Now, considering the value of , naturally, for sub-regions with higher k-coverage requirements, the attraction should be greater so that more sensors can be pulled into these sub-regions; thus, we will set greater for higher k values. The numerical relation of for different k values is determined by (the ratio of the coverage requirement multiplicity in different sub-regions), where and represent the coverage requirement multiplicity in different sub-regions, respectively. The numerical relation between and will be stated later in the simulation section.
4.3. Obstacle Repulsion from the “Fixed” k-Coverage Requirement Sub-Regions
The k-ERVFA algorithm sorts all sub-regions in a descending order of k values, then considers the sensor deployment in each sub-region successively. Namely, the sub-regions with high k values are considered as “fixed” after their deployment rounds are over. The sensor nodes inside of the “fixed” sub-regions will not participate in the future deployment process (i.e., the deployment process in sub-regions with smaller k values). Besides, in the following deployment process, the aforementioned “fixed” sub-regions should be considered as obstacles to prevent the nodes outside the “fixed” sub-regions from re-entering. This kind of re-entering will result in extra deployment cost and can be avoided when the obstacle k-repulsion is adopted.
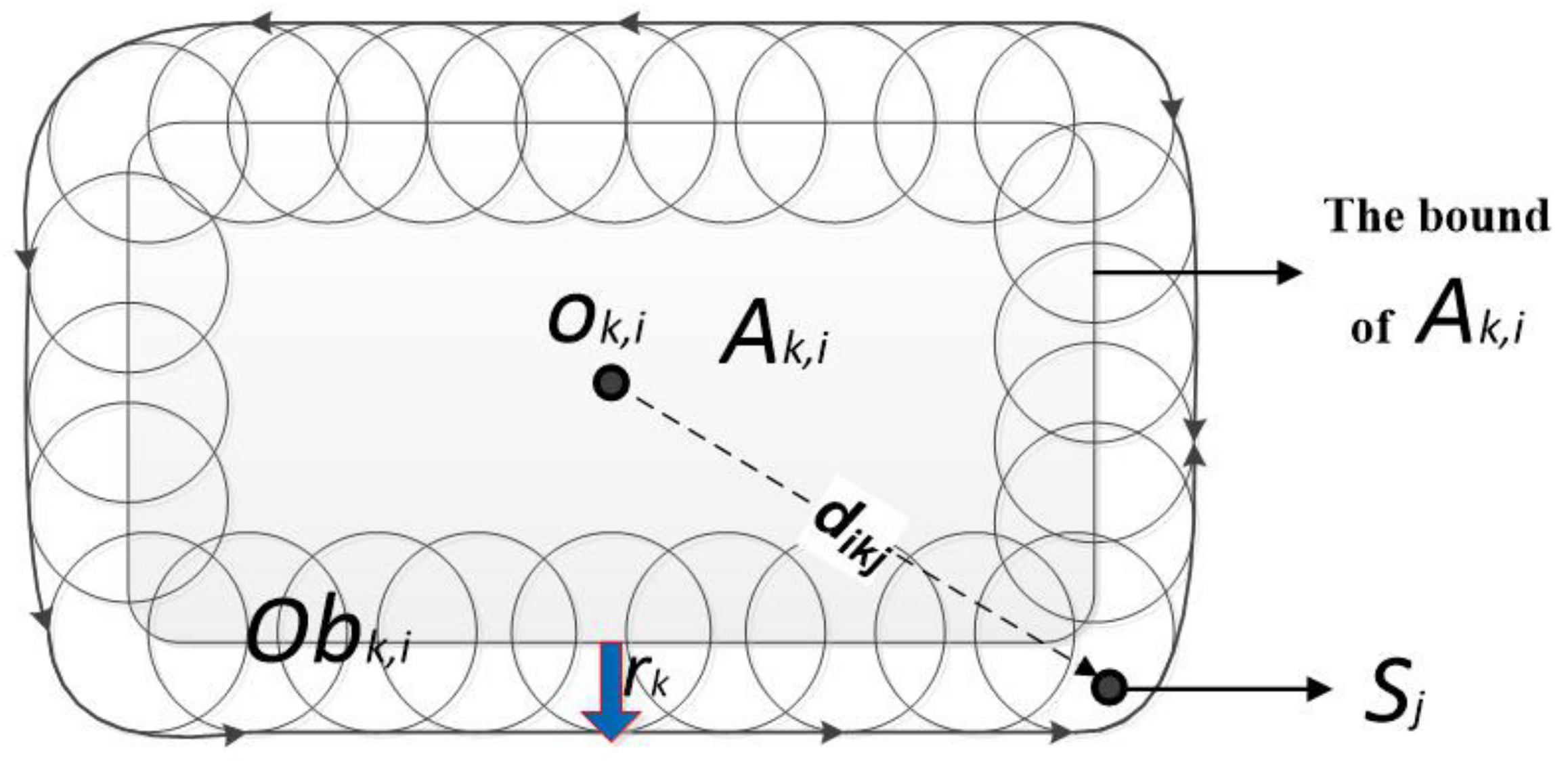
We set the obstacle region
of “fixed” sub-region
to be the combination of
and a ring region formed by the spheres with a radius of
and the centroid at the boundary of
, as shown in
Figure 4.
can be defined as:
where
p represents a point in 3D space,
is the distance from
p to
, which is the centroid of
,
is the boundary surface of region
, and
is the projection of point
p on
.
In the current deployment round, if sensor node
is outside the fixed region
and inside the obstacle region
, it will receive repulsion from
:
where
represents the repulsion of obstacle region
on sensor
with the direction from the centroid of region
to
,
is the distance between
and
, and
is the repulsion coefficient of
.
4.4. k-Resultant Force of the Sensor Node
Based on the virtual force model and the discussions above, the
k-resultant force on node
is the vector sum of the aforementioned
k-repulsion and
k-attraction, namely:
In a single deployment round, the sink node receives the coordinate of
(
) from the buoy, calculates the
k-resultant force that acts on
, and then decides the moving direction and distance of
in this round. Since the underwater sensor nodes can only move vertically, we need to obtain the component force along the
Z-axis by projecting
onto the
Z-axis:
Let
be expressed as
, then
, where
is the unit vector in the positive direction of the
Z-axis. The moving distance and direction of
are then decided by the magnitude (
) and direction of
. Let the maximum moving distance (along the
Z-axis) of all the sensor nodes in a single round be
(the suitable value of
is discussed in
Section 6). After
of each
is calculated in each round, the maximum of
can be obtained and be denoted by
. The moving distance of
in this round is then:
The normalized calculation in Equation (
22) represents the correlation between the resultant force that acts on the sensor node and the sensor’s moving distance in each round, namely greater force corresponds to longer moving distance under the premise that the maximal moving distance in a single round is
.
4.5. Motion Pattern of Boundary Nodes Based on the Ideal Elastic Collision
Any given closed region has its boundary; here, the word “region” means either one specific
k-coverage requirement sub-region
or the entire underwater monitoring area
A. For one sub-region
, when the “fixed and even” algorithm (seen in
Section 4.6 and
Section 6.1) is performed, we need to make sure that all sensor nodes inside
always stay in
(that is why these nodes are considered to be “fixed”). For the entire monitoring area
A, naturally, any sensor node should not move outside of the boundary of
A. To prevent nodes from escaping a closed region, we propose the motion pattern of boundary nodes based on ideal elastic collision.
In this paper, sensor nodes can only move along the Z-axis, so we only consider the z-coordinate. If the calculated redeployment position is outside the boundary, then the actual redeployment position should be modified as follows according to ideal elastic collision:
When
:
When
:
where
is the z-coordinate of the upper horizontal boundary of the 3D region
A,
is that of the lower horizontal boundary, and
is the modified redeployment position of node
after collision.
4.6. The Fix and Even Redeployment Algorithm
In this Section, we only describe the procedure of the fix and even algorithm; a further discussion and explanation can be seen in
Section 6.1.
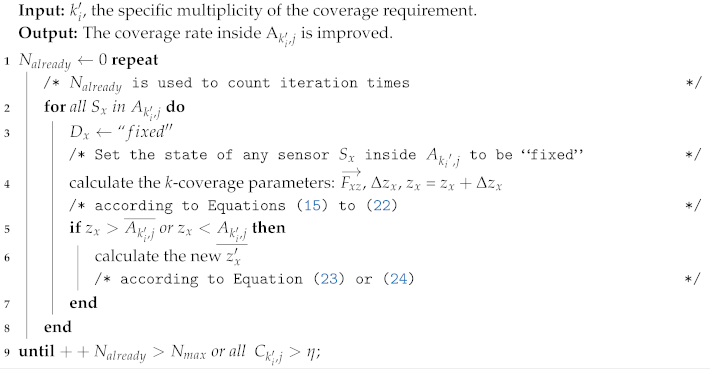
The input parameter of this algorithm is the coverage multiplicity . Set the state of any sensor inside to be “fixed”. Namely, for any sensor inside , its range of motion should be within .
Calculate the
k-resultant force on
and its moving vector
, based on the discussions in
Section 4.1,
Section 4.2,
Section 4.3 and
Section 4.4. If the calculated redeployment position
is outside
, modify the actual redeployment position according to Equation (
23) or (
24).
Repeat Step 2 until the iteration number reaches or the k-coverage rate of is met, that is , where is the satisfactory k-coverage rate for practical application. The fix and even algorithm is described in Algorithm 2.
| Algorithm 2: The “fix and even” algorithm. |
![Sensors 19 03496 i002]() |
4.7. Steps of the k-ERVFA Algorithm
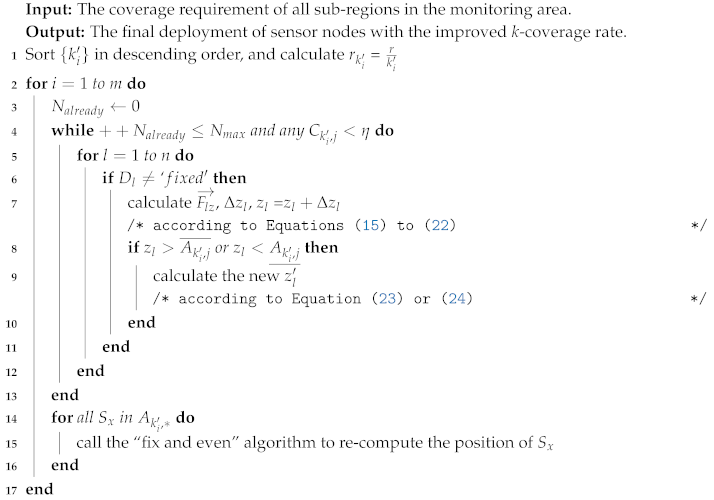
The procedure of k-ERVFA algorithm (described in Algorithm 3) is as follows:
Sort {} ( is the coverage multiplicity in different k-coverage requirement sub-regions) in descending order, and get {}, where . For each , calculate the corresponding k-equivalent radius .
Check the current iteration number
; if
, break out the loop in Step 2; otherwise, substitute the
k-equivalent radius calculated in Step 1 into Equations (
15)–(
22). The sink nodes calculate the
k-resultant force and the moving vector for all sensor nodes, except for those whose states are set as fixed in Step 3. The redeployment positions of sensors in this iteration round are then determined (for boundary nodes, the ideal elastic collision model will be adopted if necessary). Now, calculate the
k-coverage rate
of
, (
j = 1,2, …,
, where
is the total number of sub-regions that need to be
-covered). Break out of Step 2 if
or the
k-coverage rate for all
is met. Otherwise, repeat Step 2, and increase
by one.
For all sub-regions that need to be -covered, the redeployment process is partially done. Now, either the k-coverage rate for all has been met or has reached . Then, call the fix and even algorithm for all . By doing this, all sensors within are set to be fixed and will no longer participate in the following redeployment rounds (smaller ). Besides, the sensors within are homogenized, and a better coverage rate is achieved.
Increase i by one. If , go back to Step 2. Otherwise, the redeployment algorithm finalizes, and sink nodes send the final positions of sensors to the corresponding buoy nodes; the sensors then individually move to the calculated final positions, and the redeployment process is done.
| Algorithm 3: The k-ERVF Algorithm (k-ERVFA). |
![Sensors 19 03496 i003]() |
5. Simulation Results and Performance Analysis
We performed simulations of the k-ERVFA algorithm using MATLAB R2015a. The entire three-dimensional underwater monitoring area was set to be a cube with side length of 100 m. The diverse k-coverage requirement was set as follows:
a cubic sub-region that is centered on (25 m, 25 m, 25 m) needs to be three-covered, and the size of the three-coverage requirement sub-region is 30 m * 30 m * 30 m;
a cubic sub-region that is centered on (70 m, 70 m, 70 m) needs to be two-covered, and the size of the two-coverage requirement sub-region is 40 m * 40 m * 40 m;
the rest of the monitoring area needs to be one-covered.
Sensor nodes were randomly distributed initially. We set the numerical relation of
to be 1:2:3:2:3. With a given maximum iteration number, this proportion helps to achieve a satisfactory
k-coverage rate according to the simulation results. The detailed simulation parameters are shown in
Table 5.
Here,
r is set to be 10 m, and according to Equation (
14), the minimal number of sensor nodes needed to meet the diverse
k-coverage requirements (89% was considered as the satisfactory coverage rate) in different sub-regions is: 591 for the one-coverage sub-region; 62 for the two-coverage sub-region; 39 for the three-coverage sub-region; and 692 in total.
However, in the simulation experiments, we deployed no more than 650 sensor nodes into the monitoring area for the reasons below. Firstly, according to Equation (
10) and
Table 4, the calculated number of nodes will achieve a 100% one-coverage rate in the one-coverage requirement sub-regions, which is unnecessary. Secondly,
was introduced, which leads to redundancy in node deployment. In practice,
k-ERVFA achieved a satisfactory
k-coverage rate with approximately 650 nodes, as shown in the simulation results.
In the simulation experiments, the number of nodes varied from 400 to 650 with an increment of 50 each time. We compared
k-ERVFA with the following sensor deployment algorithms: RD (initial Random Deployment algorithm), VFA (classic Virtual Force Algorithm) [
7], CLA-EDS (a Cellular Learning Automata-based Enhanced Deployment Strategy) [
28], IDCA (Intelligent Deployment and Clustering Algorithm) [
21]. Note that the IDCA algorithm does not take the
k-coverage requirement into consideration, and it should be modified to be compared with other algorithms. We modified IDCA by replacing
(the expected distance between nodes, which was an input parameter of IDCA) with
(similar to the
k-equivalent radius in
k-ERVFA); thus, the modified IDCA can deal with diverse
k-coverage problems. In addition, CLA-EDS and IDCA only study two-dimensional sensor networks, so we extended them to the 3D case while constraining sensor nodes to move along the
Z-axis only. We compared five algorithms under the same conditions.
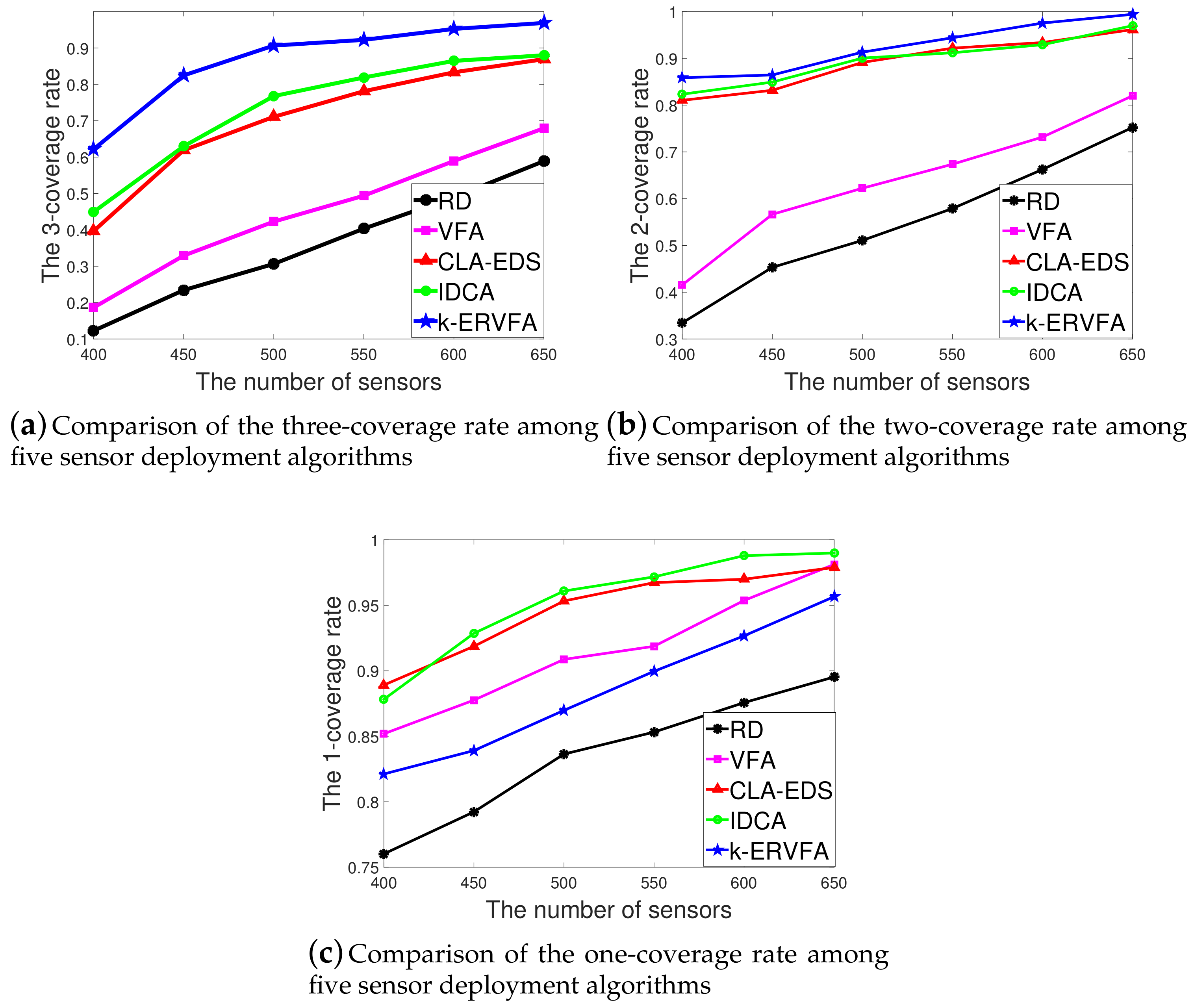
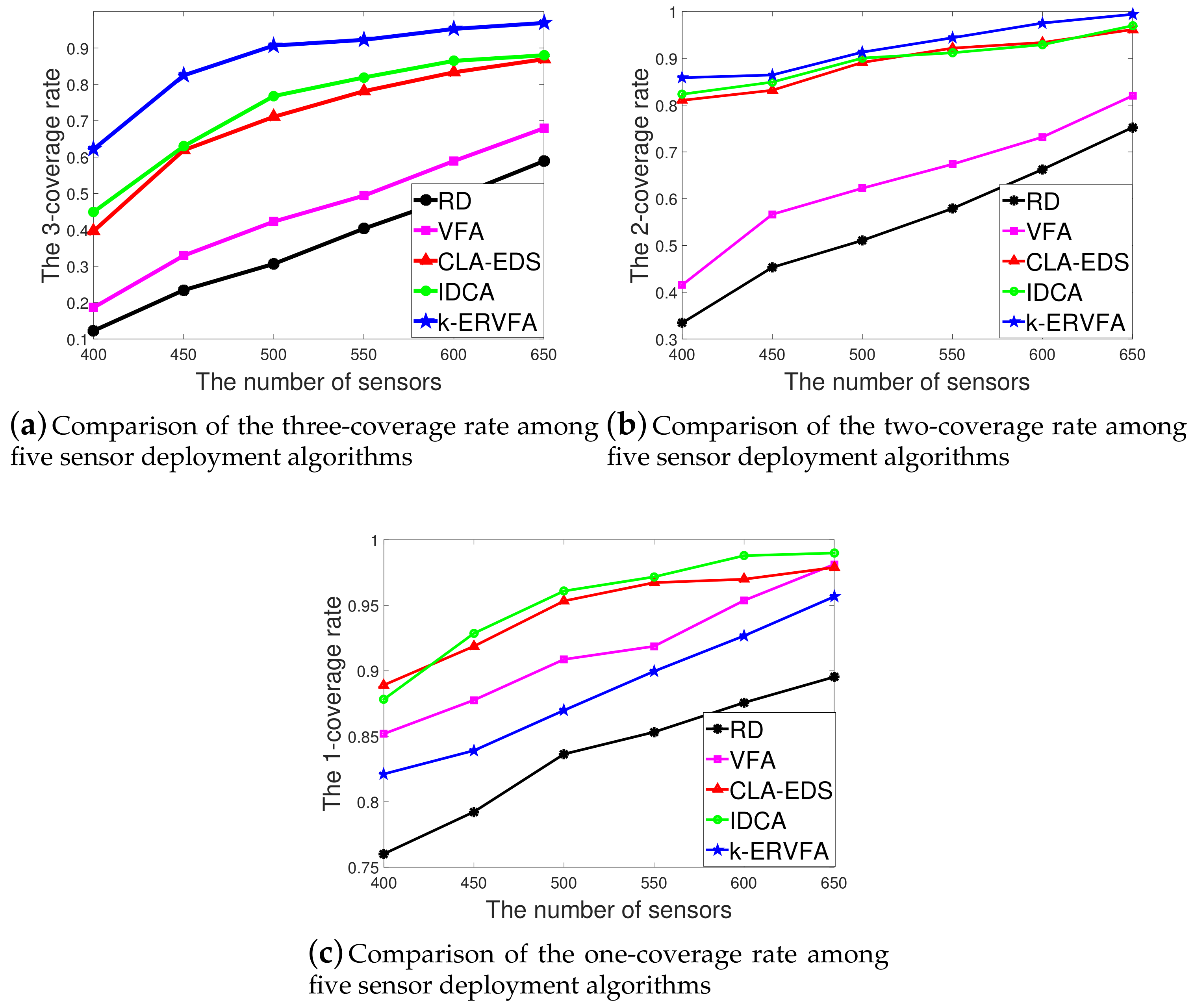
Figure 5a–c show the
k-coverage rate (
k = 3, 2, 1) achieved by different algorithms with the number of sensor nodes varying from 400 to 650.
As shown in
Figure 5a, with 450 sensor nodes, for the three-coverage requirement sub-region
, the three-coverage rate was 23.43% by RD, 32.92% by VFA, 61.89% by CLA-EDS, 62.97% by IDCA, and 82.45% by
k-ERVFA, which was the highest among the five algorithms. Similarly, in
Figure 5b, with 450 sensor nodes, for the two-coverage requirement region
, the two-coverage rate was 45.32% by RD, 56.65% by VFA, 83.17% by CLA-EDS, 84.92% by IDCA, and 86.44% by
k-ERVFA, which was also the highest. Note that although 450 was far less than 692 calculated by Equation (
14), to achieve over an 89%
k-coverage rate, the two-coverage and three-coverage rate of
k-ERVFA reached 82% and 86%, respectively. It is obvious that
k-ERVFA improved the
k-coverage rate significantly.
Similar results were obtained when n varied from 500 to 650. The two-coverage and three-coverage rates of k-ERVFA were higher compared to other algorithms. It can be found that there was a significant advantage in the three-coverage rate, while the advantage was rather slight for the two-coverage rate.
Figure 5c demonstrates the one-coverage rate achieved by the five algorithms. IDCA had the highest one-coverage rate, followed by the CLA-EDS algorithm, then the classic VFA and
k-ERVFA algorithms. Note that the
Y-axis started at 0.75, and the difference of the coverage rate between
k-ERVFA and IDCA was from 3.33% to 9.11% as
n varied from 400 to 650, which shows that
k-ERVFA increased the two- and three-coverage rate significantly with a slight sacrifice in the one-coverage rate. In addition, the one-coverage rate of
k-ERVFA reached 91.87% when
, which was 12.64% higher than RD, showing that its one-coverage performance was acceptable.
The main reason was that the k-ERVFA algorithm sorted all diverse k-coverage requirement sub-regions in terms of k values and considered redeployment in high k-coverage sub-regions preferentially. Namely, the algorithm deployed nodes into high k-coverage requirement sub-regions first, followed by the redeployment in low k-coverage sub-regions. In particular, for some point in a sub-region that needs to be k-covered, if it can only be covered because of the lack of one sensor node, then the other existing sensor nodes are wasted for this point. For higher k values, this kind of squander of sensors was severe and should be eliminated with first priority, which explains why k-ERVFA set priorities according to the k values.
In this respect,
k-ERVFA was superior to CLA-EDS, which did not take priority coverage for the higher
k-coverage requirement into consideration (according to [
28], the CLA-EDS algorithm showed an obvious decrease in the high
k-coverage rate). IDCA introduced the
k-expected distance
, which was similar to the
k-equivalent radius in
k-ERVFA, and both algorithms were based on VFA, while the
k-ERVFA algorithm achieved a better two- and three-coverage rate by considering the
k-resultant force comprehensively and applying the fix and even algorithm to redeploy nodes within sub-regions. Compared to the classic VFA algorithm in which nodes are deployed uniformly,
k-ERVFA pulled more nodes into the two- and three-coverage requirement sub-regions to achieve more desirable two- and three-coverage rates with a slight decrease (<
) in the one-coverage rate.
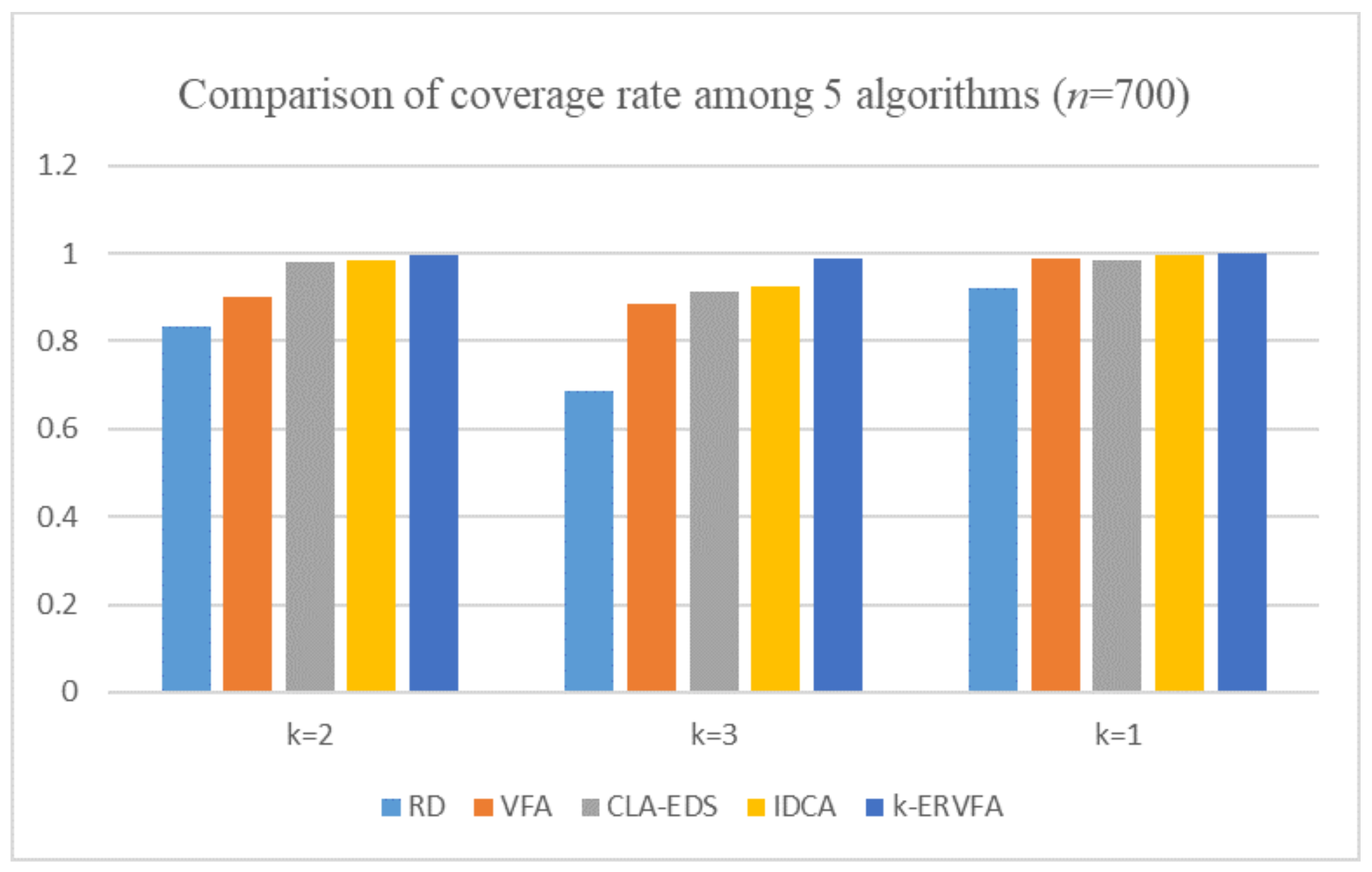
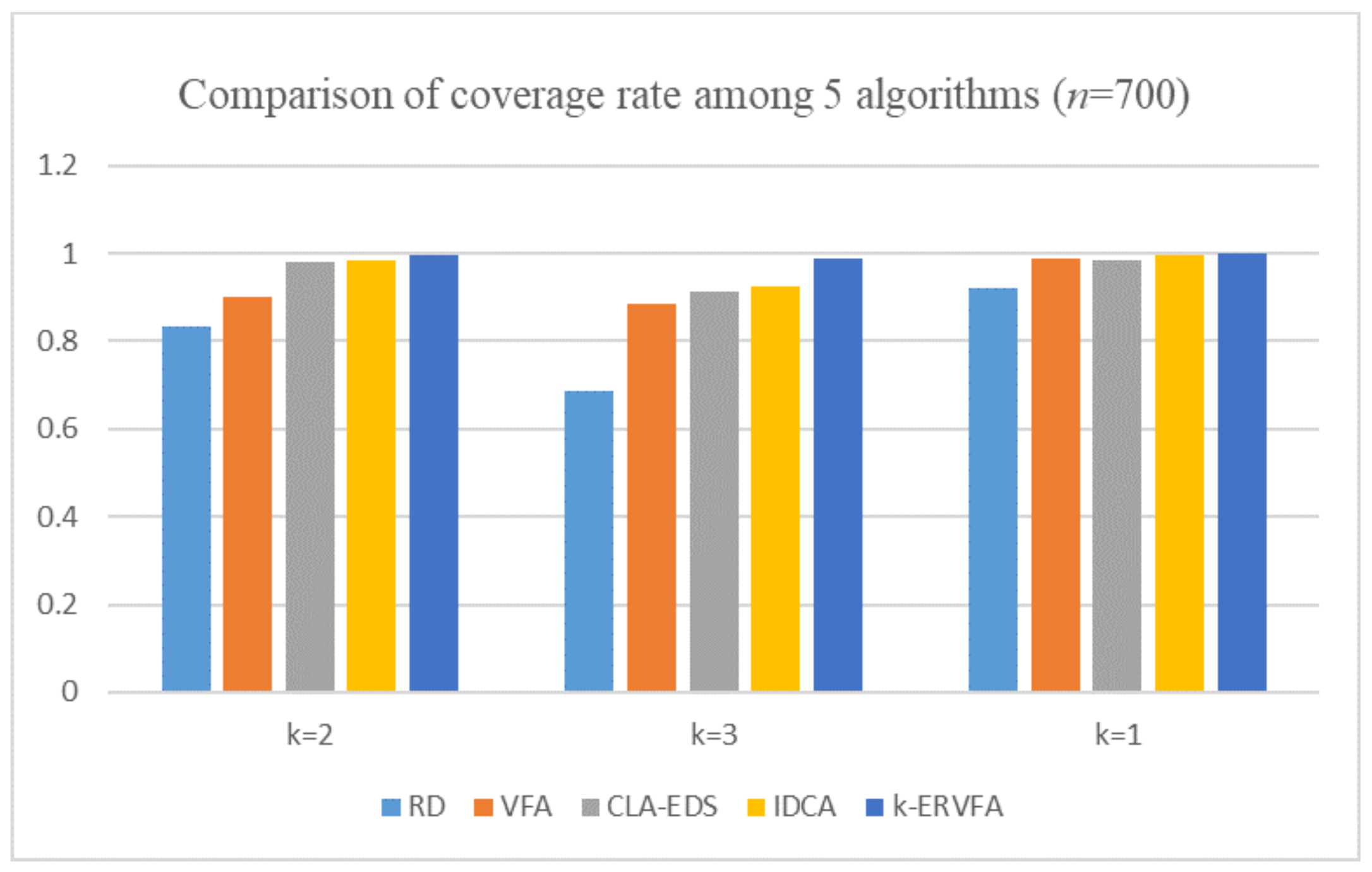
In addition, in order to prove that it is reasonable to deploy 650 nodes in practical applications, we added a set of experiments with 700 nodes, and the experimental results are shown in
Figure 6. Deploying 700 sensor nodes could achieve a 100% one-coverage rate and at least an 89% two- and three-coverage rate. However, compared with the result of 650 nodes, the effect of the improvement was not obvious. It also caused the redundancy of nodes and the increase of the deployment cost. In fact, with dynamic adjustment of node position based on the
k-resultant force,
k-ERVFA achieved a satisfactory two- and three-coverage rate (though the one-coverage rate decreased slightly) using only 650 nodes. Therefore, it is reasonable and optimal to deploy 650 nodes in the real scenario.
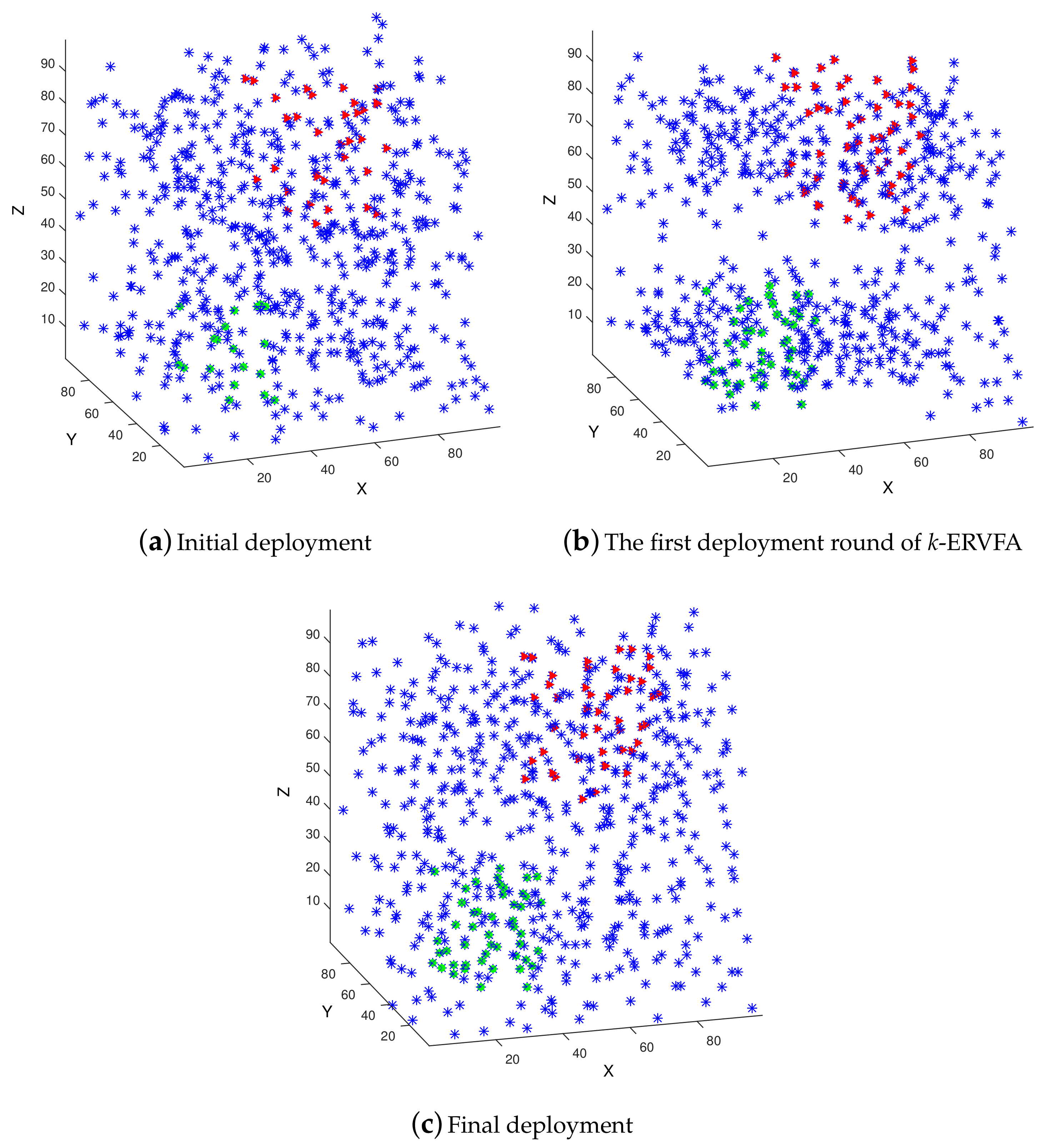
Figure 7a–c demonstrate the deployment of 600 sensor nodes in the 3D underwater area with the parameters shown in
Table 5.
Figure 7a shows the initial Random Deployment (RD) where the green dots are the sensor nodes located in three-coverage requirement sub-region
, the red triangles are the nodes in two-coverage requirement sub-region
, and all other blue asterisks are sensors in one-coverage requirement sub-regions. It can be seen that sensor nodes were non-uniformly distributed with RD, and the number of nodes in
and
were few.
Figure 7b shows the distribution of nodes after the first round of
k-ERVFA, i.e., the round in which spheres with three-equivalent radius (
) were applied to achieve high a three-coverage rate. Due to the
k-attraction of sub-region
, nodes would aggregate towards
, and the two-coverage rate increased. However, the node distribution in
was still non-uniform, which lead to many coverage breaches.
Figure 7c is the ultimate distribution after
k-ERVFA has been performed. Compared with
Figure 7b, nodes were more uniformly distributed in
and
due to the effect of the fix and even algorithm. There were fewer coverage breaches in
so the one-coverage rate increased accordingly. Eventually, the
k-coverage rates achieved by
k-ERVFA with 600 nodes were: 92.67% for one-coverage, 97.54% for two-coverage, and 95.22% for three-coverage, which was consistent with the theoretical analysis.
6. Further Discussions
6.1. The Principle of the Fix and Even Algorithm
After completing Step 1 of the k-ERVFA algorithm, the redeployment process in the -coverage requirement sub-regions was only partially done. For now, we know that either the coverage rate in all -coverage requirement sub-regions reached or the iteration number reached . The latter is the more common case in practice. It is worth emphasizing that the value of should not be too large due to restrictions of energy and running time. Namely, in most cases, the iteration number reached , but the -coverage rate inside was far from satisfaction.
However, if we continue the node redeployment process in Step 2 of k-ERVFA, some nodes already inside may move away from due to the attraction from other sub-regions, causing unnecessary moving and computing costs. In order to avoid this situation, here we consider site preservation and bound these nodes inside , i.e., these nodes cannot move out of and will not participate in future redeployment rounds. This is the operation of “fix”.
Now that the nodes are fixed inside , their distribution is still uneven, and the -coverage rate is not satisfactory. Naturally, we want to homogenize the node distribution inside . This is the operation of “even”.
With the fix and even algorithm, we fixed the sensor nodes inside the sub-region and then homogenized the node distribution, for the purpose of achieving a higher -coverage rate inside .
6.2. Discussion of the Value of
In this section, we discuss whether there is a rough acceptable range for the value of to guide node deployment in practice.
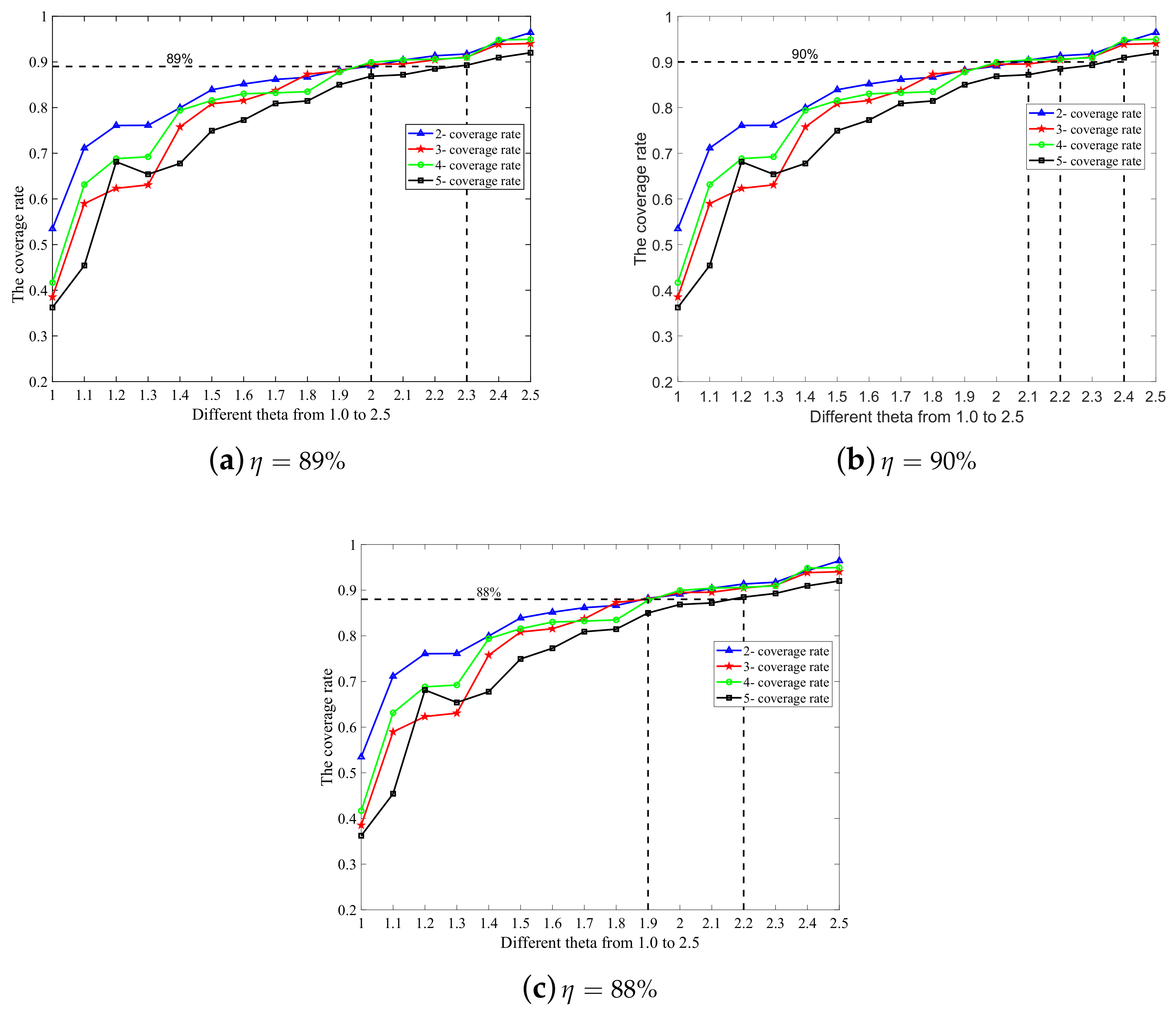
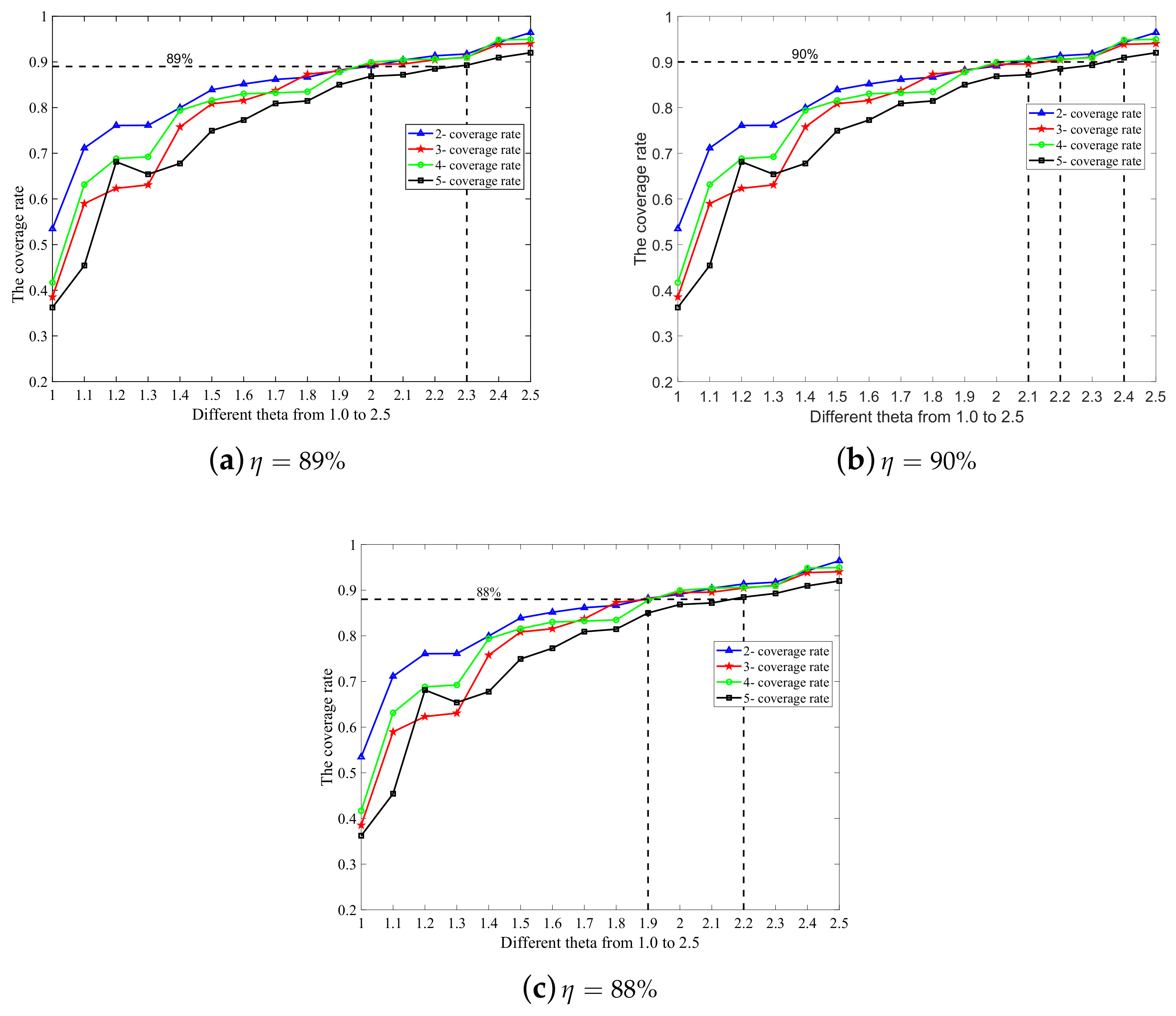
As shown in
Figure 3, when
, some individual points in the curve of the f-coverage rate were above the corresponding points in the curve of the three-coverage rate, and these two curves tended to merge when
. For a given
,
increased with
k, which provided more extra nodes. Namely, if we used the same
for different
k values, then the redundancy of nodes in cases with high
k values was excessive and would result in extra deployment cost. Therefore, we conjectured that with the increment of
k, the optimal
was no more than
or even had an upper bound of a constant.
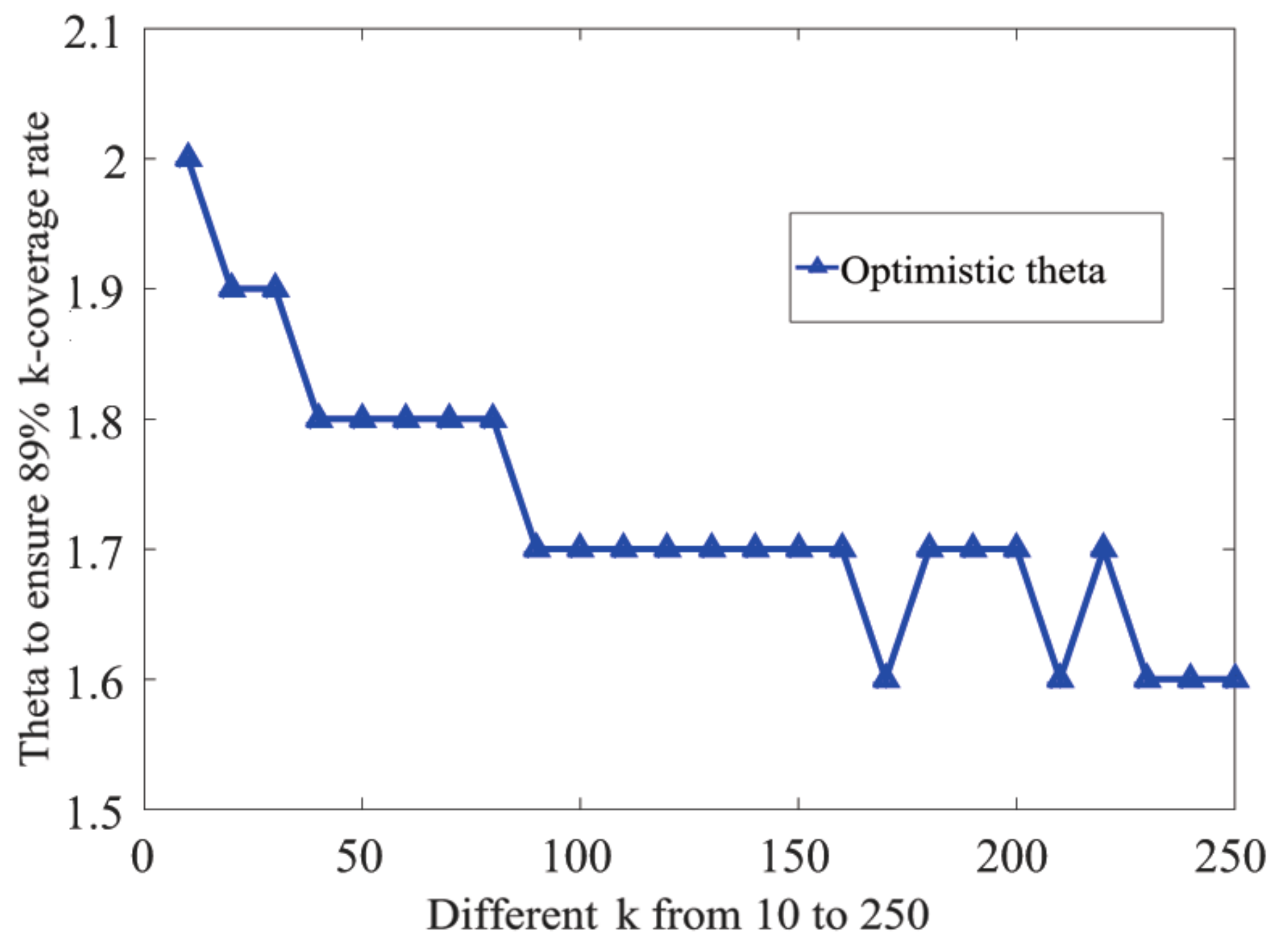
Conjecture 1. when η is 89% and .
Proof. It is difficult to give the strict mathematical proof of the conjecture, so we discuss the problem by performing statistical simulations.
Let
be 89%. We ran the
(Optimal
Search Algorithm) simulation experiments with
k values varying from 1 to 300. We had the maximum of
as
= 2.3 when
k = 5. Namely, for
, the value of optimal
had a numerical upper bound of 2.3. The simulation result shown in
Figure 8 also suggests that
decreased when
k increased. In general, the value of
decreased when
k increased from 10 to 250.
For higher k values, the node deployment interval ()) was rather small, which led to a high time complexity of . Therefore, we only carried out the for several individual k values to testify to our hypothesis. We obtained (500, 89%) = 1.6 when k = 500, (700, 89%) = 1.6 when k = 700, and (900, 89%) = 1.6 when k = 900. None of the above values was larger than 2.3, which was consistent with our hypothesis. Note that seemed to approximate to some lower bound when k was large, and this lower bound should be greater than one.
When was set to be one, we performed simulations with different k values and calculated the k-coverage rate. We obtained a 28.79% k-coverage rate when k = 500, a 29.96% k-coverage rate when k = 700, and a 26.11% when k = 900. The average k-coverage rate obtained was 33.32%. This suggests that should still be greater than one even when k is very large. In fact, when we increased to 1.1, the average k-coverage rate was then 61.71%, which almost doubled the k-coverage rate when . This shows that the redundancy caused by plays a crucial role in the improvement of k-coverage. Even a slight increment of over one could significantly increase the k-coverage rate.
In summary, we had when . □
The value of was within a small constant range and had an upper bound, independent of k. It can be seen that the actual deployment volume density ensured the coverage was linearly related to k, and the deployment cost was acceptable even if the value of k was large.
6.3. Discussions of the Value of r, , and
6.3.1. Discussion of the Value of r
To study the influence of the value of
r on the performance of
k-ERVFA, we conducted simulation experiments with different
r values. Most of the simulation parameters were the same as those in
Table 5, except for the coverage radius
r and the number of sensor nodes.
According to Equation (
14), the total number of sensor nodes needed to obtain a satisfactory
k-coverage rate (89% in this paper) is proportional to
.
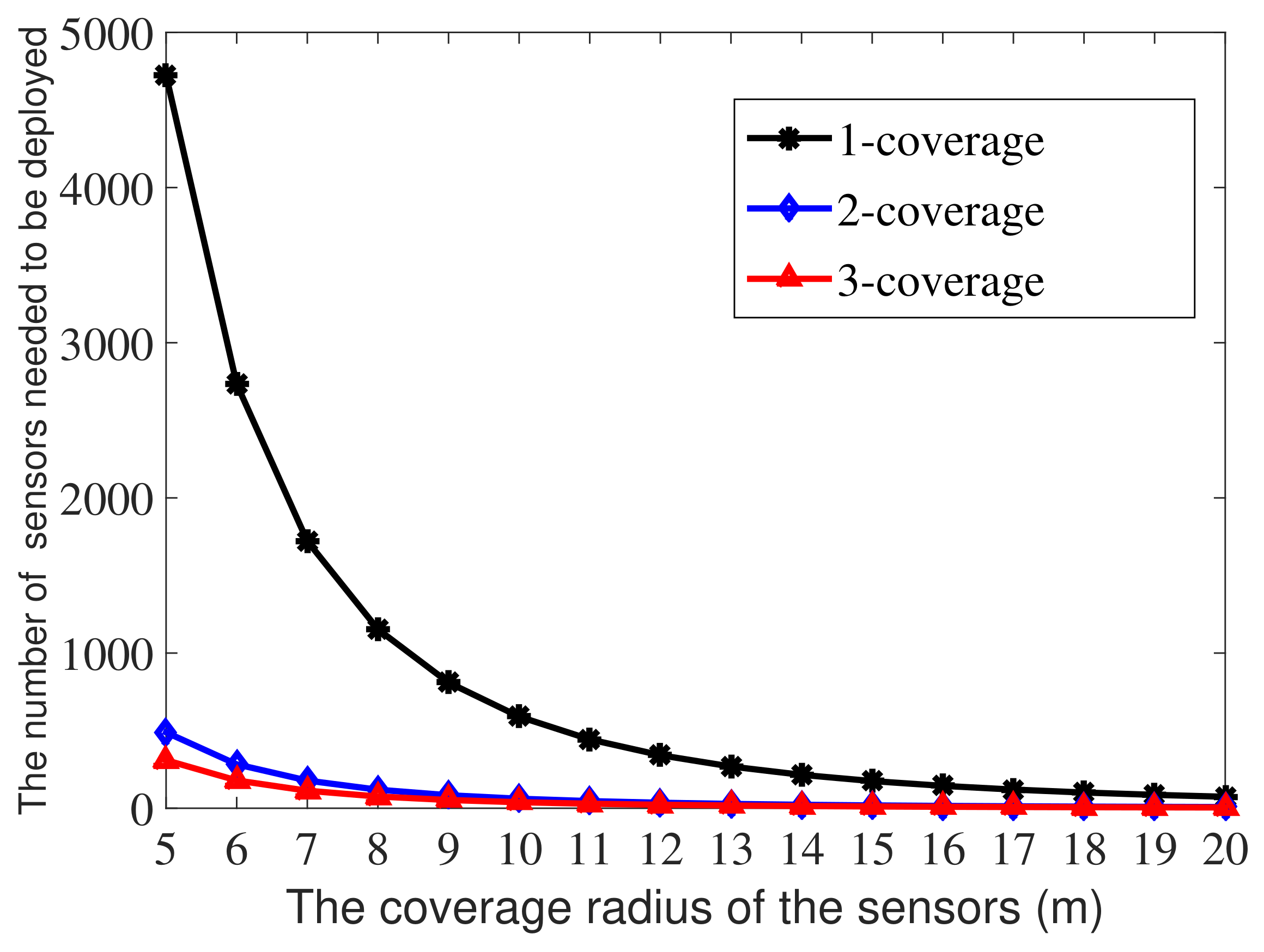
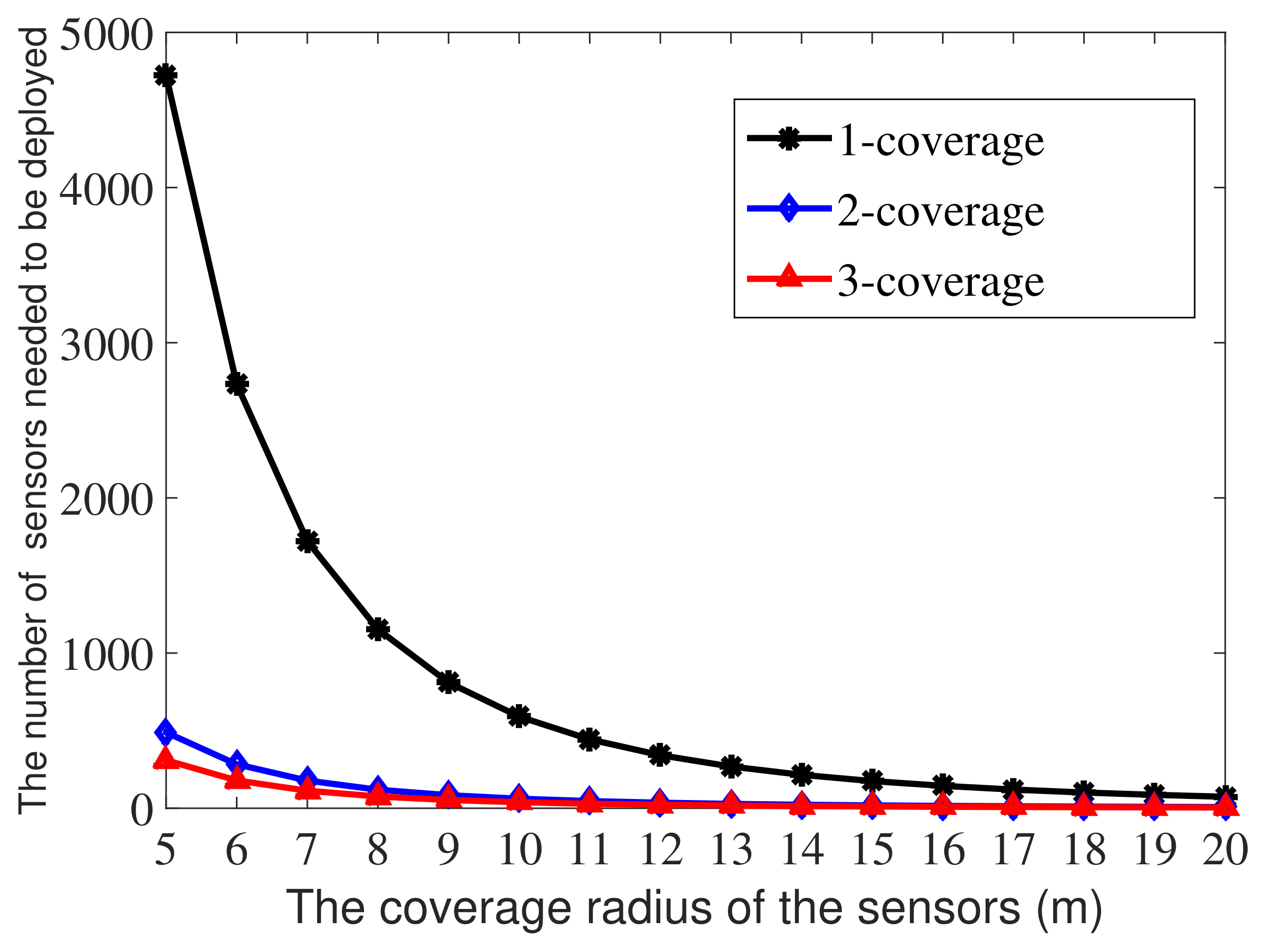
Figure 9 shows the minimum number of nodes needed in each sub-region to meet the corresponding
k-coverage (
k = 1, 2, 3) requirement with
r varying from 5 m to 20 m.
As shown in
Figure 9, with the increase of the node coverage radius
r, the number of required nodes decreased rapidly at first and then became stable. This was because when the coverage radius was small, the coverage area was very limited, and a large number of nodes were needed to achieve the required coverage rate. As
r increased, the coverage rate increased, and the number of nodes required decreased. When
r reached a certain threshold, the number of required nodes tended to stabilize due to comprehensive coverage and network connectivity.
In addition, the coverage radius of the node was determined by its power. The increase of power would increase the energy consumption of the system and reduce the network life, so it was necessary to consider comprehensively the coverage and energy consumption of the system to choose the appropriate node radius in the practical applications.
In the case of
r = 1 m, the calculated number of sensor nodes was:
in the one-coverage requirement sub-region, 61,115 in the two-coverage requirement sub-region, and 38,675 in the three-coverage requirement sub-region. Note that the total number of sensor nodes needed when
r = 10 m was 692 (seen in
Section 5), and it is obvious that with different coverage radius, the number of sensor nodes needed differed greatly. Fewer sensors were needed when the coverage radius was large, which is in consistent with practical experience.
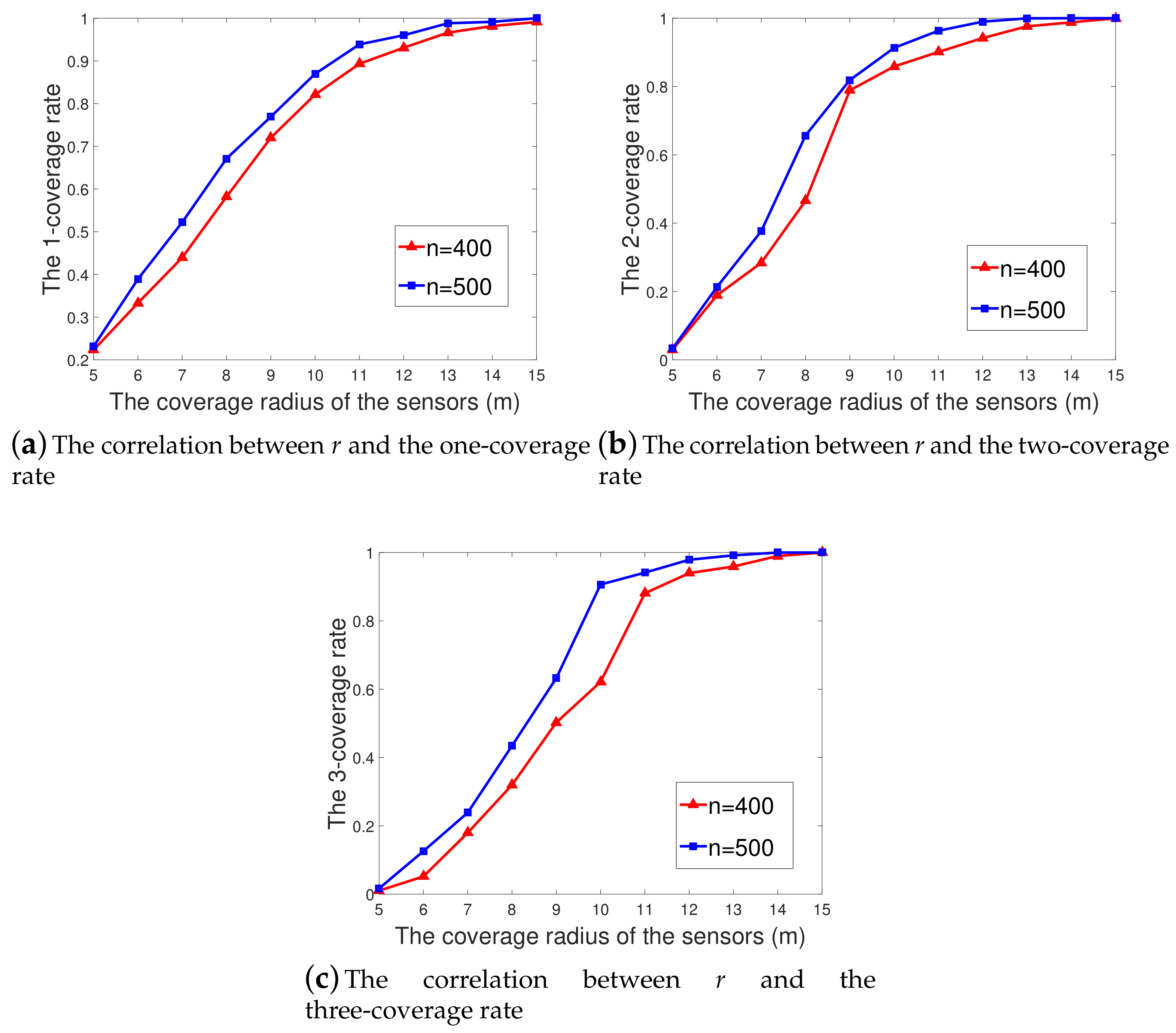
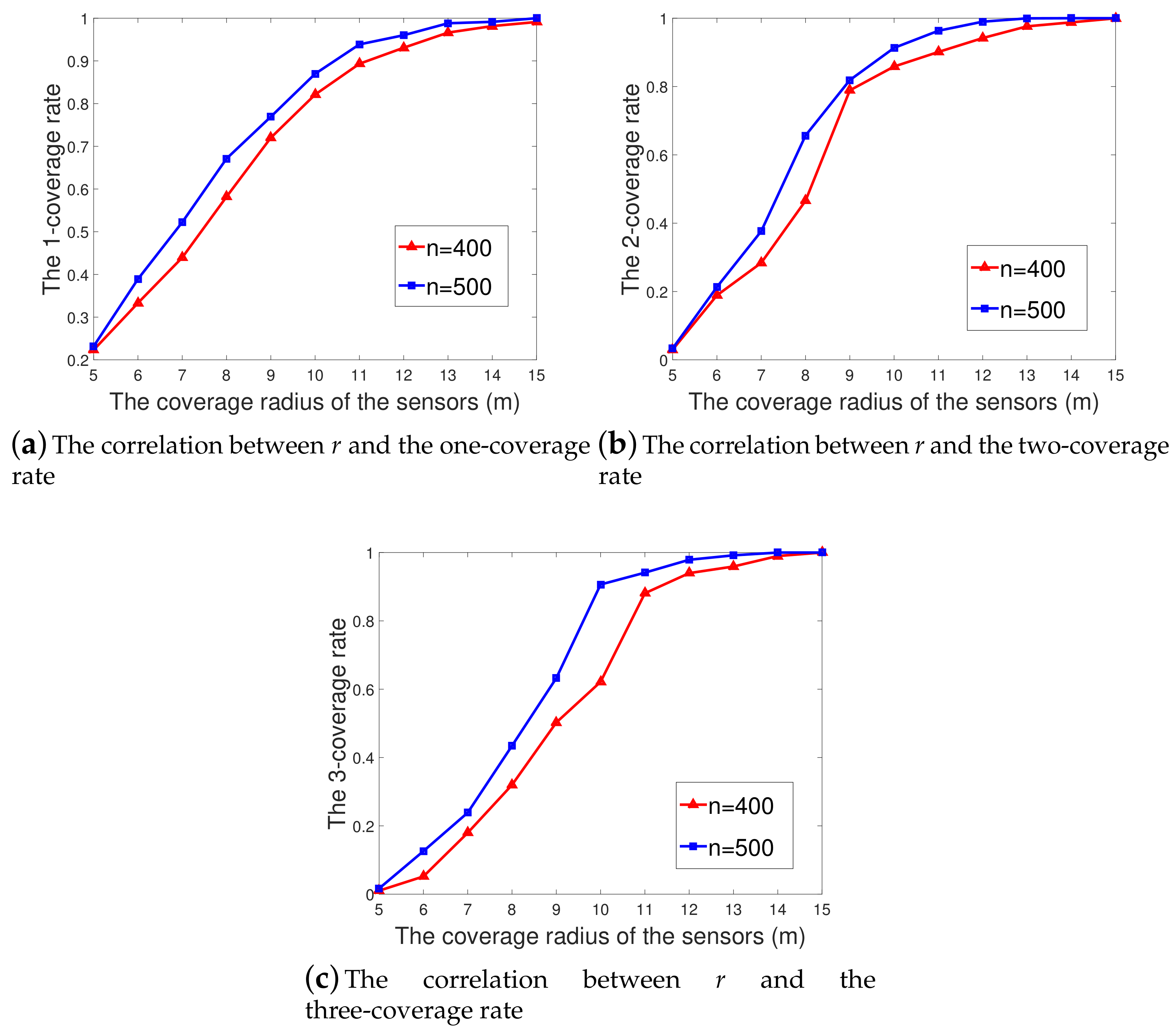
Figure 10a–c show the curves of the
k-coverage rate (
k = 1, 2, 3) for different sensor numbers (400 and 500) when
r varied from 5 m to 15 m.
It should be noted that when
r was small (e.g.,
m), the calculated total number of sensor nodes needed to obtain a satisfactory
k-coverage rate was quite large (more than 5000), while we set
n as 400 or 500 in the simulations. This is the problem of node deployment in sparse sensor networks. Because
k-ERVFA adopts a greedy strategy that considers node deployment in high
k-coverage requirement sub-regions as the first priority, the coverage rate in the low
k-coverage requirement sub-regions achieved in sparse sensor networks was rather poor. Therefore, the A
k-ERVFA (seen in
Section 6.4.1) was applied here to improve the performance in sparse sensor networks, especially for sub-regions with a low
k-coverage requirement.
For higher r values ( m), we tended to use the original k-ERVFA algorithm to highlight its advantage of improving the k-coverage rate with high k values.
As shown from
Figure 10a–c, the
k-coverage rate in the corresponding area increased with the value of
r, which is consistent with practical experience. When
m and
, which is the aforementioned case of a sparse sensor network, the initial 1-, 2-, and 3-coverage rates in the corresponding sub-regions were 19.06%, 0.96%, and 0.37%. These coverage rates increased to 23.17%, 3.34%, and 1.68% in the simulation experiments of A
k-ERVFA.
The two-coverage rate and three-coverage rate increased significantly when 5 m
10 m, as shown in
Figure 10b,c. This increase tendency slowed down a bit when
r was greater than 10 m. In particular, when
m and
, the initial 1-, 2-, and 3-coverage rates were 94.36%, 89.7%, and 57.13% and were improved to 96.02%, 98.99%, and 97.89% by
k-ERVFA. These
k-coverage rates were rather impressive compared with the
k-coverage rate obtained in
Section 5 with 650 sensor nodes, considering only 500 sensors were deployed here. This indicates that a slight increment of
r can lead to a significant improvement of the
k-coverage rate. When
m and
, the initial 1-, 2-, and 3-coverage rates were 99.13%, 99.94%, and 97.51%, and they all increased to 100% after redeployment with
k-ERVFA. In conclusion, the value of
r had a significant influence on the variation of the
k-coverage rate.
Obviously, the k-coverage rate achieved by k-ERVFA was 100% for higher r values ( m). Therefore, for the diverse 3D underwater k-coverage requirement scenarios described in this paper, 400∼500 sensor nodes with a physical coverage radius of 10 m∼15 m can guarantee a satisfactory k-coverage rate.
6.3.2. Discussion of the Value of
In this section, we study the influence of the maximum iteration number on the performance of the
k-ERVFA algorithm. Similarly, the setting of the underwater monitoring area and all simulation parameters except for
were the same as those in
Section 5. We carried out simulations with
n = 400 and
increasing from 10–150 by steps of 10.
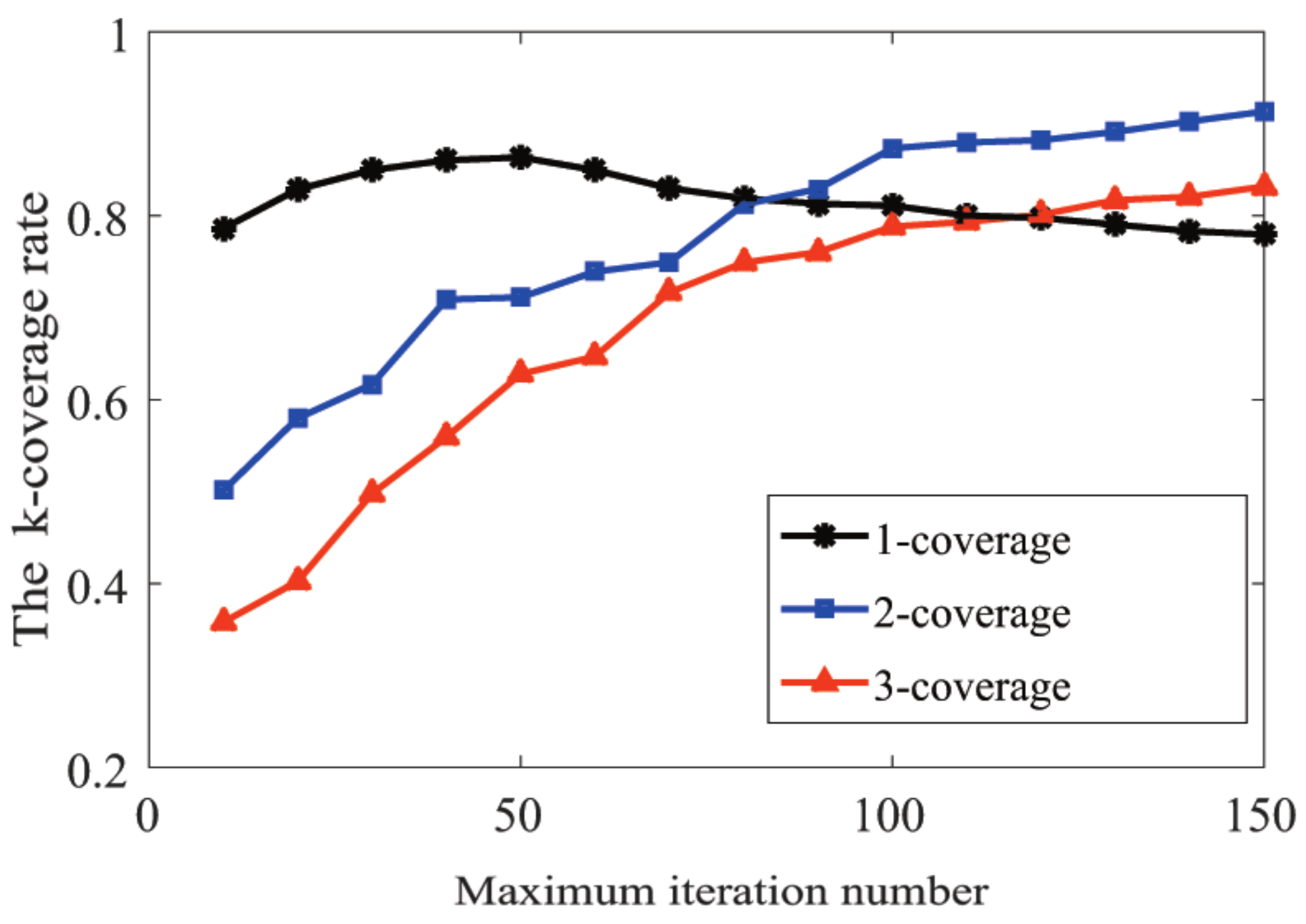
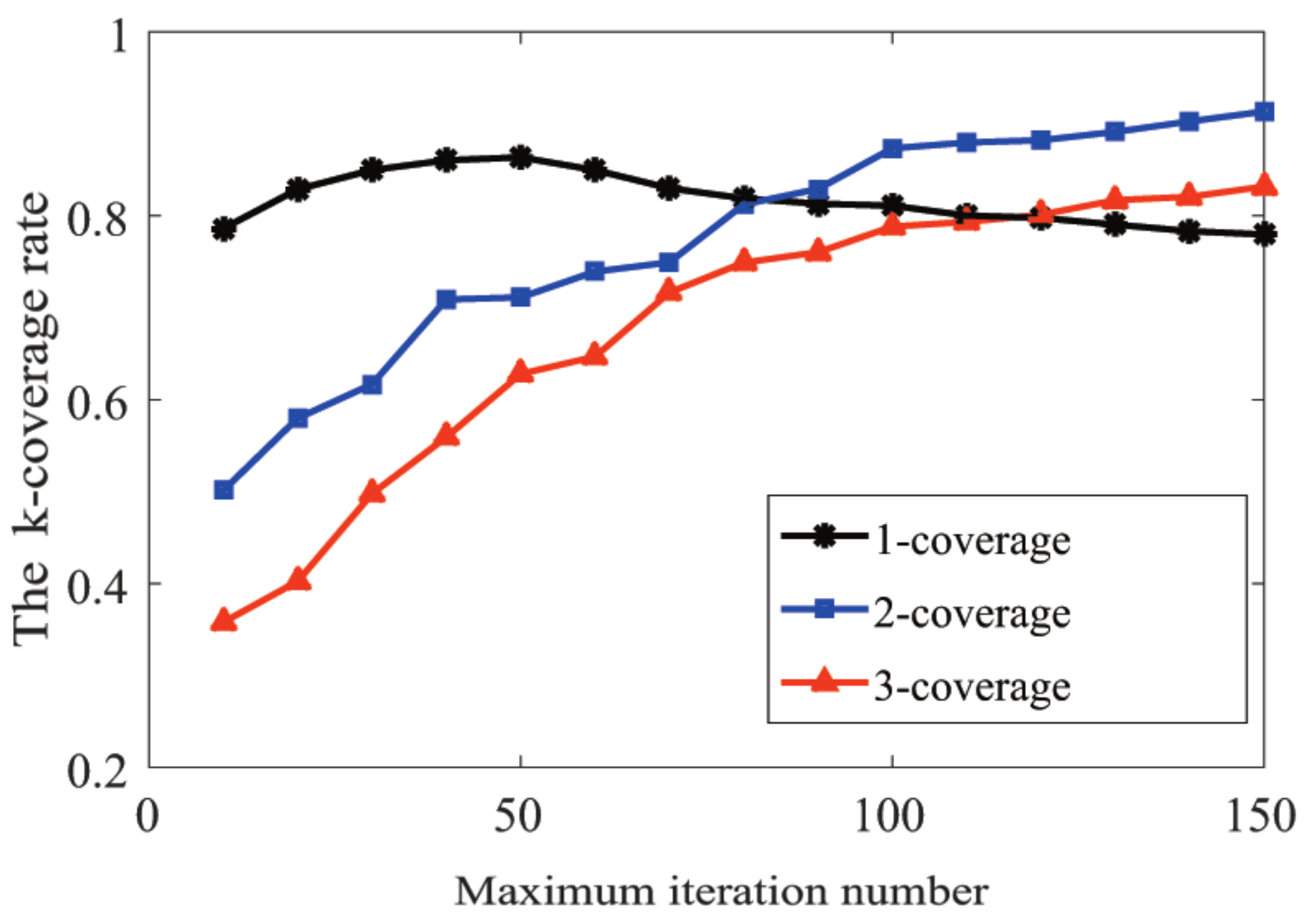
Figure 11 shows the different
k-coverage rates obtained by
k-ERVFA with different values of
. It should be mentioned that in order to eliminate the difference from the initial coverage rate caused by the initial random deployment, the initial sensor distributions in different rounds were set to be identical. The initial 1-, 2-, and 3-coverage rates were 77.51%, 41.96%, and 24.81%, respectively.
Besides, we modified Step 2 of the original k-ERVFA so that the loop ends only if the iteration number has reached , i.e., the judging condition of whether the coverage rate has reached was removed. The “fix” operation was also abolished; thus, sensor nodes moved more freely in order to demonstrate the effect of and the greedy strategy of k-ERVFA.
As expected, the two-coverage rate and three-coverage rate increased significantly with the growth of
, as shown in
Figure 11. When
= 150, the two-coverage rate obtained was 91.33%, and the three-coverage rate was 83.17%. They increased by 49.37% and 58.36%, respectively, compared to the initial coverage rate.
The one-coverage rate increased smoothly when increased from 10 to 50, reaching a maximum coverage rate of 86.35% when = 50. However, it decreased gradually when was greater than 50 and reached a minimum of 77.96% when = 150. It is reasonable to predict that the two- and three-coverage rate will keep growing, while the one-coverage will decrease when keeps increasing. In fact, when was small, the homogenization effect from repulsion was the dominant factor to facilitate the increase of the one-coverage rate. When was large, the k-attraction of the sub-regions with the high k-coverage requirement was dominant, and more sensors moved into high k-coverage sub-regions, which led to the increment of the high k-coverage rate and the decline in the one-coverage rate. Larger also highlighted the characteristics of the greedy strategy adopted by the k-ERVFA algorithm, as mentioned above.
According to
Figure 11, the two-coverage and three-coverage rate increased significantly when
grew from 40 to 100, and this increasing tendency slowed down when
was over 100. When
was around 100, the one-coverage rate was also acceptable. Considering that the excessively large value of
would result in unnecessary running time and energy consumption, it was appropriate to set
as 80 to 100 in the underwater monitoring scenario described in this paper. In the practical scenario, an appropriate value of
is important to achieve the better trade-off between coverage requirements and network cost.
6.3.3. Discussion of the Value of
In this section, we study the effect of
, which is the maximum possible moving distance (along the
Z-axis) of the sensor node in each iteration. Similarly, the parameters except for
were identical to those in
Section 5. We carried out simulations with
n = 400 and fixed the initial distribution of sensor nodes throughout the simulation process for the same reason mentioned in
Section 6.3.2. The initial 1-, 2-, and 3-coverage rates were 77.51%, 41.96%, and 24.81%, respectively.
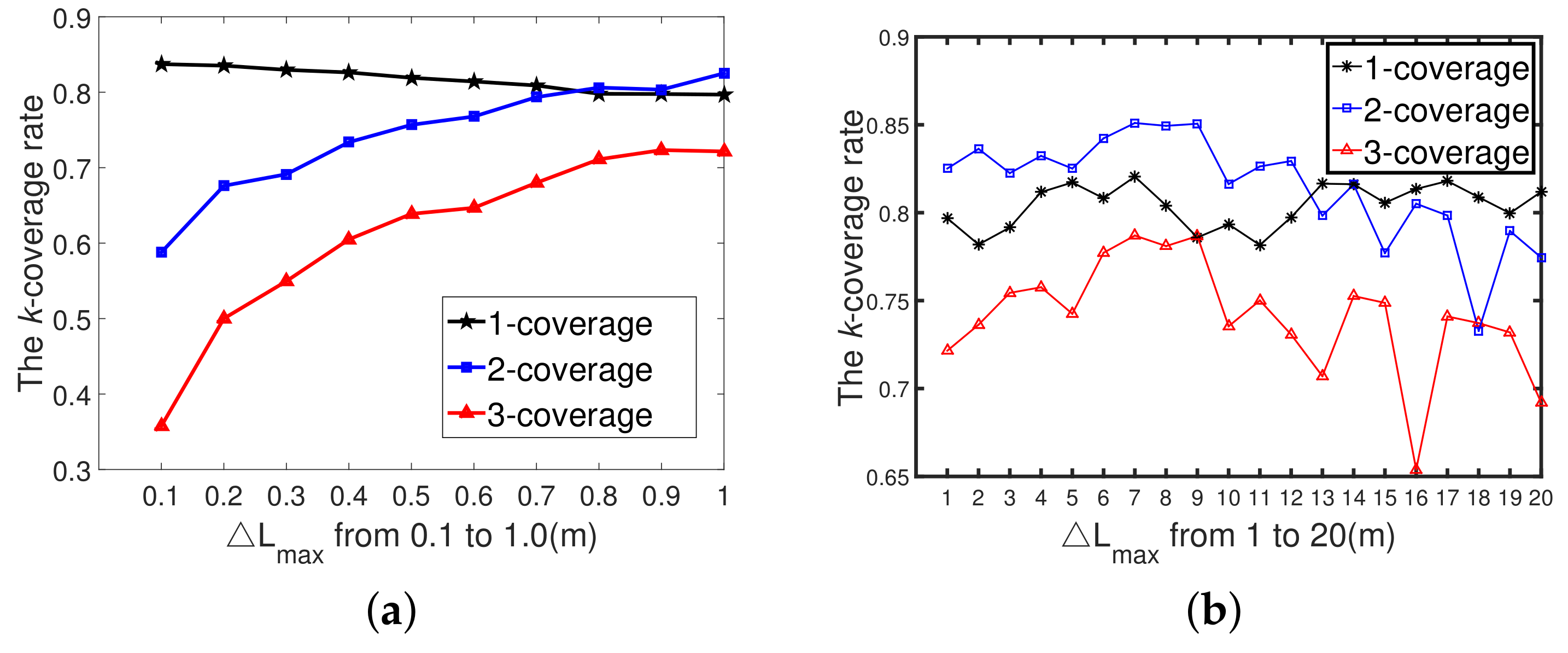
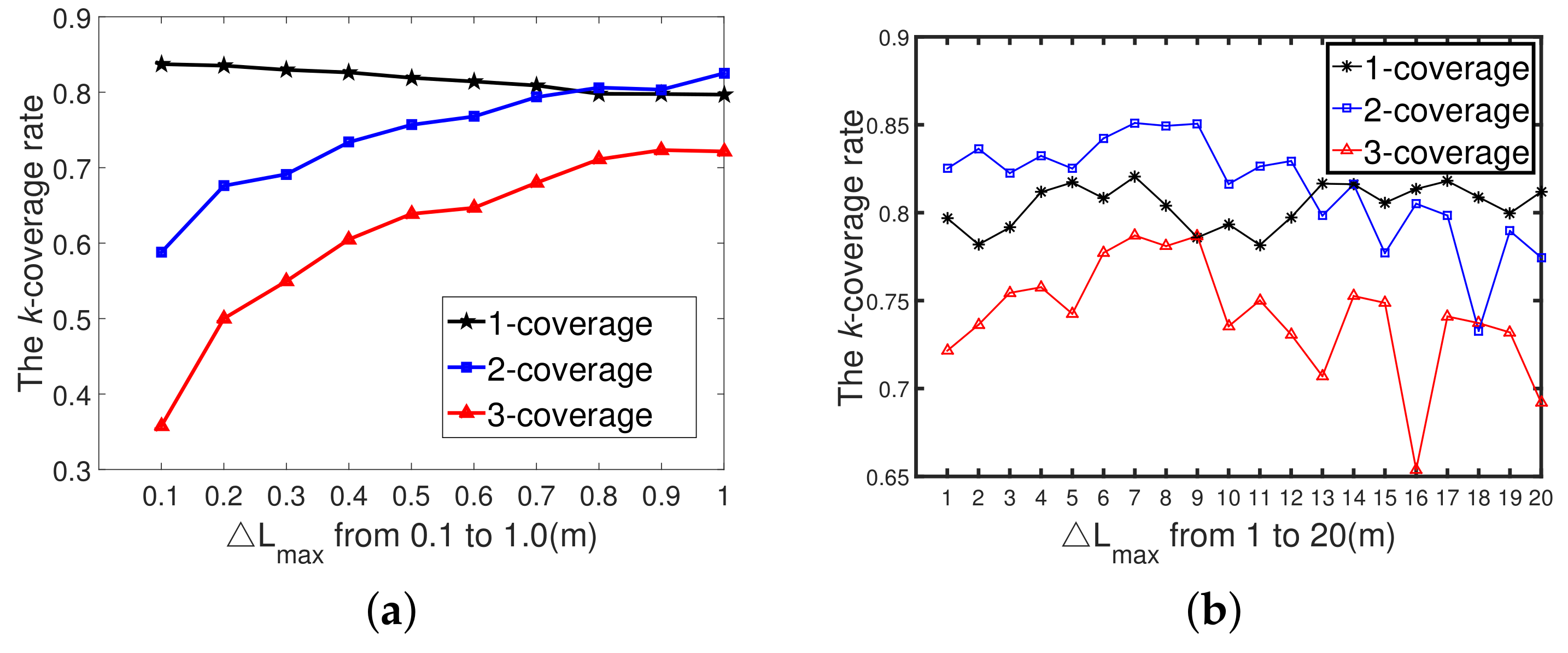
Figure 12a shows the different
k-coverage rates achieved by the
k-ERVFA with
growing from 0.1 m to 1 m with a step size of 0.1 m. When
= 0.1 m, the final 1-, 2-, and 3-coverage rates were 83.72%, 58.78%, and 35.76%, respectively. Compared with the initial
k-coverage rates, the improvement by
k-ERVFA was inappreciable. The reason was that compared to the size of the underwater monitoring area (100 m ∗ 100 m ∗ 100 m),
was so small (0.1m) that sensor nodes could not reach the desirable destinations based on
k-ERVFA within the maximum iteration times (
= 100); thus, the
k-coverage rate obtained was unsatisfactory. However, the effect of
k-ERVFA improved with the increasing of
. The decline in the one-coverage rate shown in
Figure 12a was due to the fact that more sensor nodes moved into the two- and three-coverage requirement sub-regions when
increased.
In
Figure 12b, when
grew from 1 m to 20 m with a step size of 1 m, all the
k-coverage rates oscillated with the growth of
. When the value of
was small (
m), the moving range of sensor nodes in each iteration was longer compared with those in
Figure 12a (
m). With the same iteration number, the effect of the redeployment process was more significant; thus, all the
k-coverage rates increased. However, when
kept increasing (
m), the moving range of sensor nodes in each iteration was so long that their motion pattern turned into a certain kind of disordered oscillation. Hence, the
k-coverage rates obtained by
k-ERVFA could not satisfy the actual requirements.
In conclusion, the value of
should be moderate. If
is too small (≤1 m), then sensors cannot reach their final destinations before the redeployment process is terminated. However, the excessively large value of
(≥10 m) will cause nodes to drift and oscillate; thus, the performance of
k-ERVFA will be unpredictable. We can see from
Figure 12b that when
= 7 m, the 1-, 2-, and 3-coverage rates all reached their maximum value. Therefore,
= 7 m was the optimal value under such simulation conditions (
m).
Table 6 shows the optimal
for different total numbers of sensors (when
r = 10 m). We can see that with the node number increasing, the optimal value of
decreased gradually. The reason was that with more sensor nodes deployed in the area, the average distance between the coverage breached, and the neighboring sensor nodes decreased; thus, the appropriate moving distance of the sensor node in each iteration (which was decided by
in Equation (
22)) decreased as well. Therefore, the key to application implementation lies in how to obtain the optimal value of
according to the total number of nodes in the actual scenario.
6.4. The Improvement of k-ERVFA
The underwater sensor network is closely related to many marine environment factors, such as fish stock interference and tidal disturbances. For example, when the fish school destroy the nodes or the nodes and equipment age and fail, the previous deployment requirements will be changed to adapt to the new situation. The number of nodes may be insufficient in some scenarios, and even in some extreme conditions, the total number of sensor nodes is so small that the sensor network is quite sparse. In addition, in practical applications, k-coverage requirements may change over time according to seasonal changes or actual situations, which is also a real problem that needs to be considered. Aiming at these actual problems mentioned above, we discuss the Ak-ERVFA (Averaged k-ERVFA) algorithm for node sparsity and the Ck-ERVFA (Changed k-ERVFA) algorithm for time-variant demand, respectively.
6.4.1. Ak-ERVFA
Due to the strategy taken by k-ERVFA, which satisfied the k-coverage requirement with high k values preferentially and the fact that the total number of nodes was severely limited, the performance of k-ERVFA in sparse sensor networks was unsatisfactory. Especially, sub-regions with requirements of low coverage multiplicity tended to be ignored.
We propose the Ak-ERVFA (Averaged k-ERVFA) to improve the performance of k-ERVFA in sparse sensor networks, and the modifications are as follows:
Let
be 89%; the number of nodes required in different
k-coverage requirement sub-regions can then be calculated by Equation (
14), denoted by
,
,…,
,
, respectively (
k = 1, 2, 3, …
).
Calculate the proportional factor for each sub-region as follows: .
Modify the termination condition in Step 2 of k-ERVFA; now, the iteration will also be terminated if the number of nodes inside reaches , where is the total number of sensor nodes.
We can see that with A
k-ERVFA, the number of nodes deployed in any sub-region was proportional to its expected node number calculated by Equation (
14). In this way, sub-regions with different
k-coverage requirements were treated equally to some extent. Thus, the
k-coverage rate in sub-regions with the requirements of low coverage multiplicity became reasonable.
6.4.2. Ck-ERVFA
C
k-ERVFA was defined as the enhanced
k-ERVFA for time-variant situations. In
Section 4, the coverage requirement information of the underwater monitoring area was known in advance and was considered to be fixed throughout the life-cycle of the sensor network. However, the coverage requirement information is often time-variant in practical applications, and we should extend our
k-ERVFA algorithm so that it may work in such time-variant situations. In fact, this extension is possible when the running time (response time) of
k-ERVFA is far less than the time interval between changes in coverage requirement information, which is the case in most practical applications.
We propose the enhanced Ck-ERVFA as follows:
Sink nodes collect the latest coverage requirement information, i.e., the geometry attributes and the coverage multiplicities of all sub-regions. Then, the coordinates of the centroids of the sub-regions and the corresponding equivalent radius are calculated. All sub-regions are sorted in descending order of the k value. Set n as zero.
Sink nodes calculate the k-resultant force similar to Step 2 in the k-ERVFA algorithm.
Call the fix and even algorithm similar to Step 3 in the k-ERVFA algorithm.
Sink nodes send redeployment commands to sensors, and let . Check if n reaches , otherwise go to Step 2.
Sink nodes monitor the coverage requirement information constantly; go to step 1 if the coverage requirement information changes, otherwise go to Step 5.
In summary, C
k-ERVFA monitors changes of the coverage requirement information, and node redeployment will be performed according to the latest coverage requirement. In this way,
k-ERVFA can adapt to underwater monitoring tasks with the time-variant coverage requirement. It should be noted that in C
k-ERVFA, sink nodes are capable of collecting information about the coverage requirements, as discussed in [
28].









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}