A QoE-Oriented Uplink Allocation for Multi-UAV Video Streaming

Abstract
1. Introduction
- We study the issue of rate allocation when multi-UAVs capture videos and send them back via the wireless channel simultaneously. The total QoE of all videos are considered as the optimization goal and the costs for channel renting and energy consumption have been deducted.
- Based on the potential game, we build a new distributed resource allocation framework. According to the potential function we propose, the game is proved as a complete potential game and the correlated equilibrium of the game exists and is unique.
- In order to make all the UAVs in the cluster iteratively update their bandwidth strategy, we adopt a distributed self-learning algorithm, by which the correlated equilibrium could be achieved with a relatively fast convergence rate.
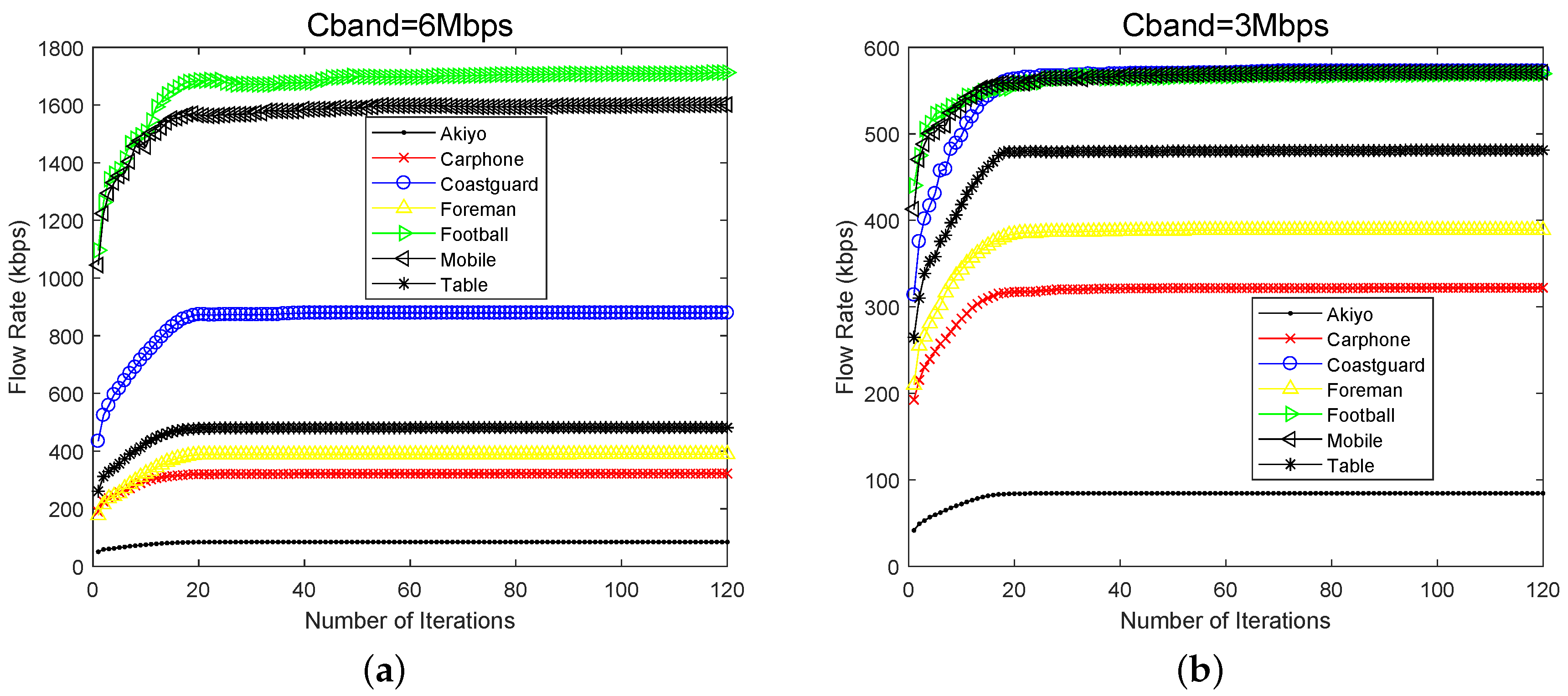
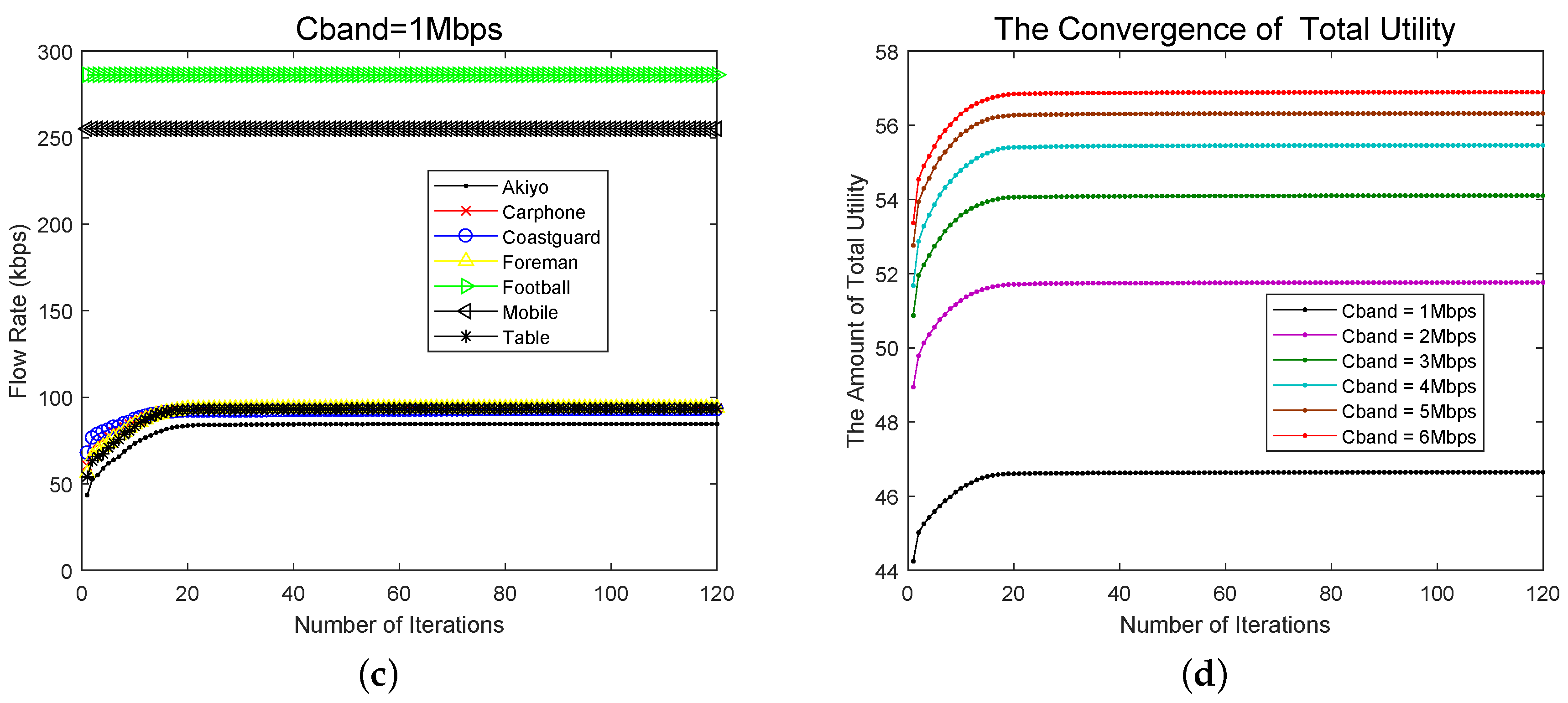
- The rate ranges and characteristics of some real videos are analysed and these videos are applied in the simulations. From the real-time flow rate and total utility, we find that the algorithm converges rapidly and each UAV can intelligently select and maintain a stable video uplink rate, so that a reasonable allocation of wireless resources could be achieved. The influence of total channel bandwidth and cost factor is also analyzed.
2. Related Works
2.1. The Allocation Goal
2.2. The Allocation Object
2.3. The Allocation Method
3. System Model and Utility Function
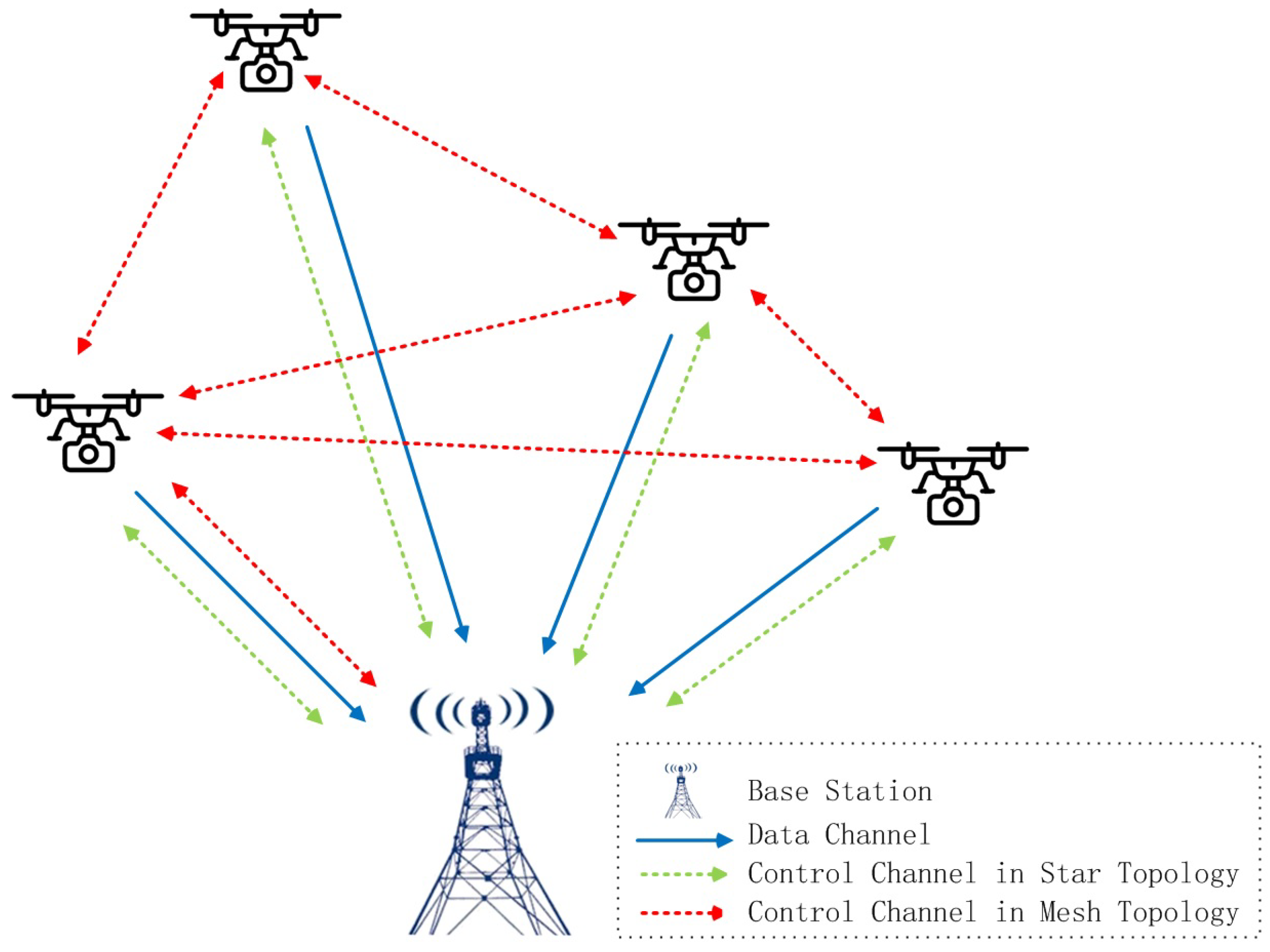
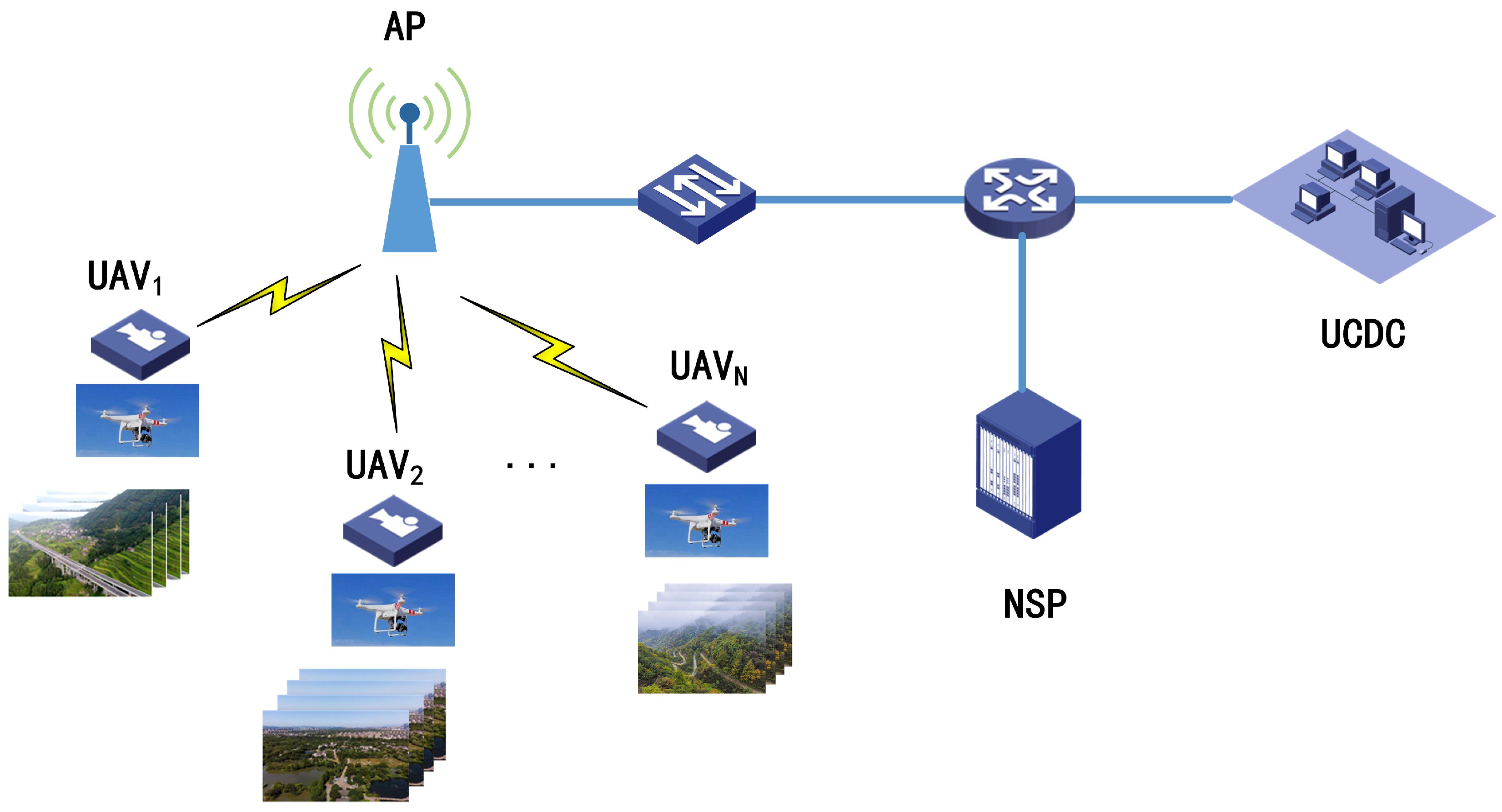
3.1. System Model
3.2. QoE-Based Utility
4. Potential Game Based Uplink Allocation
5. Uplink Allocation Algorithm
6. Simulation Results and Analyses
6.1. Initial Analysis
6.2. Convergence of the Algorithm
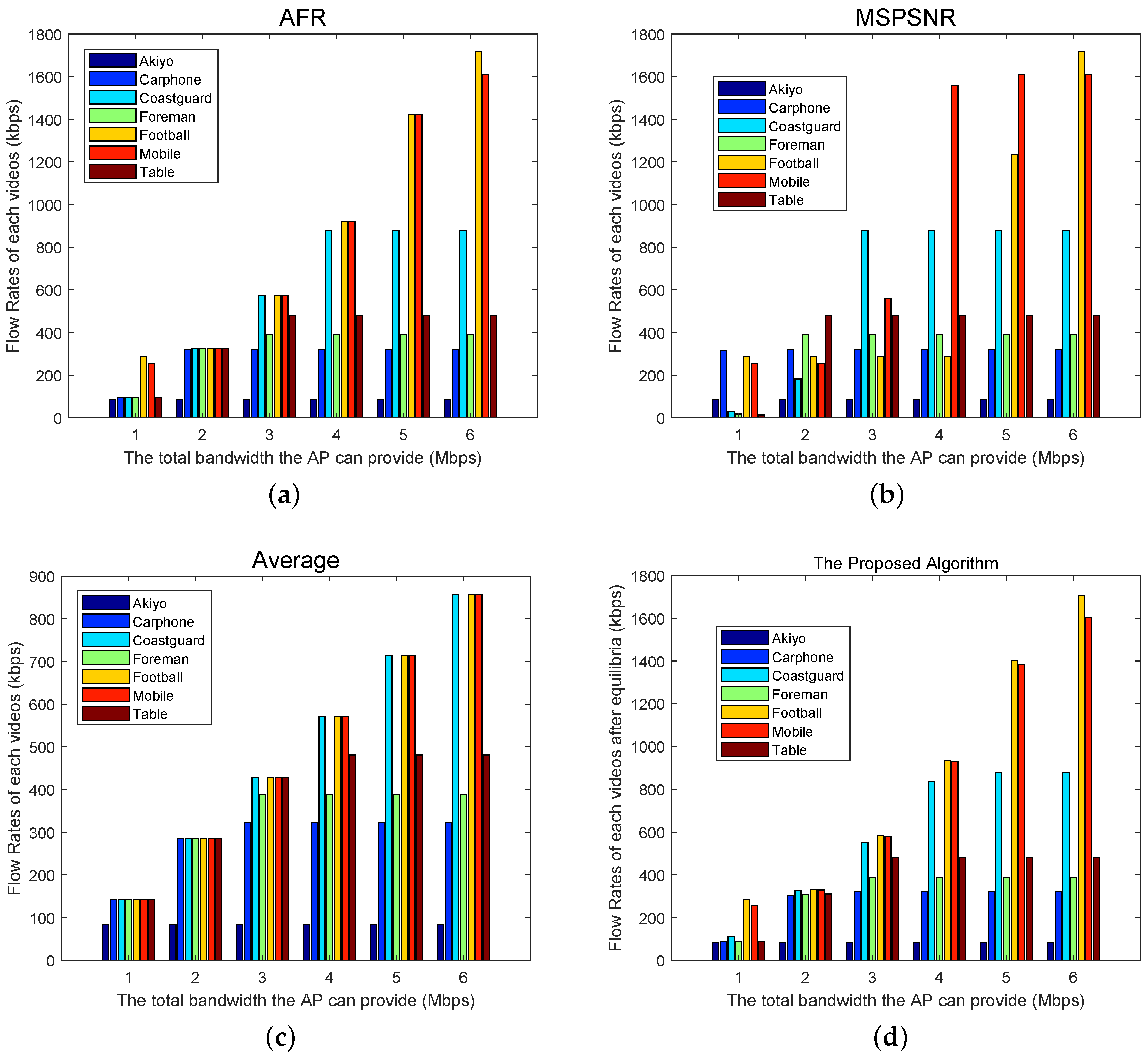
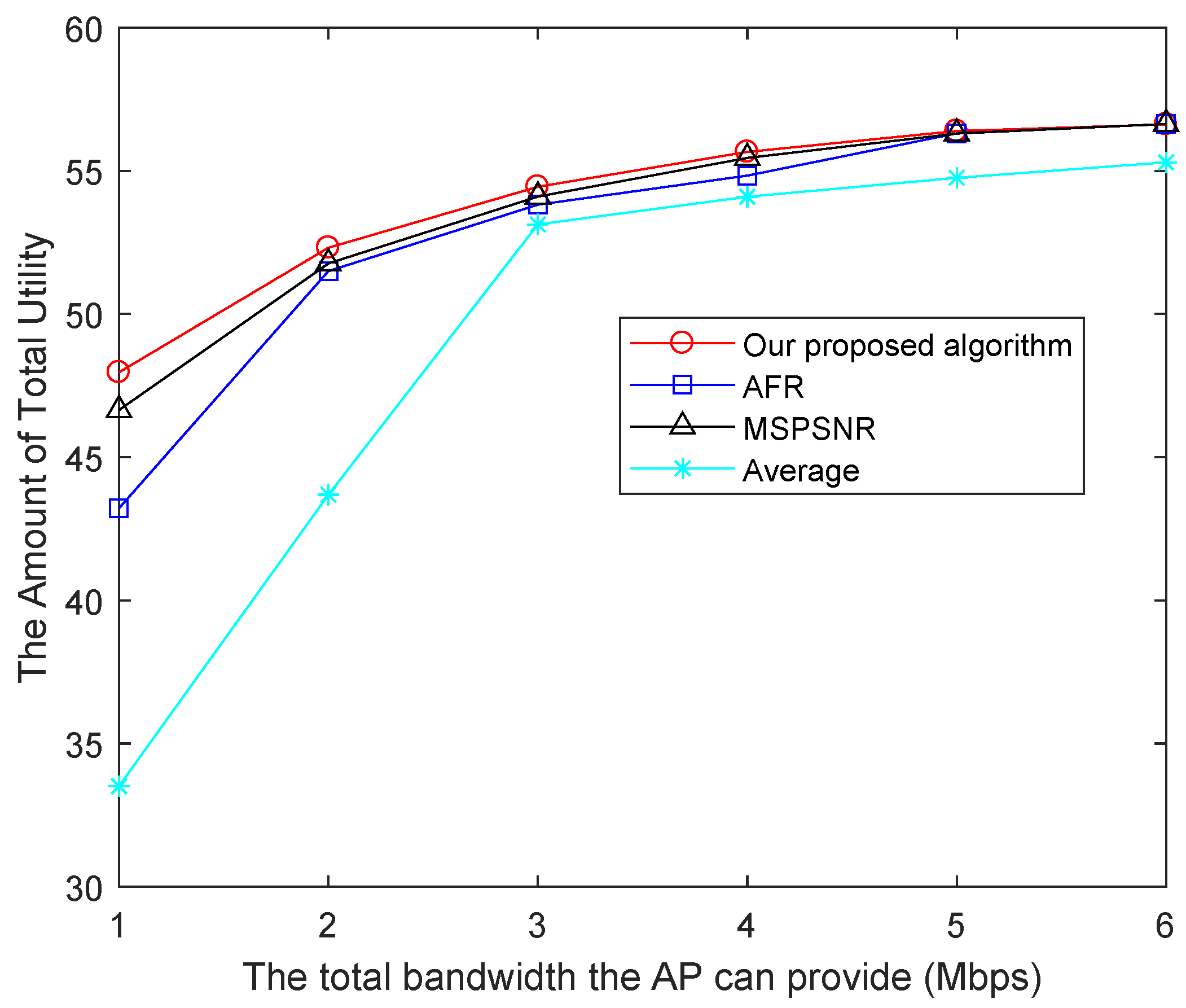
6.3. Performance Analyses of Different Algorithms
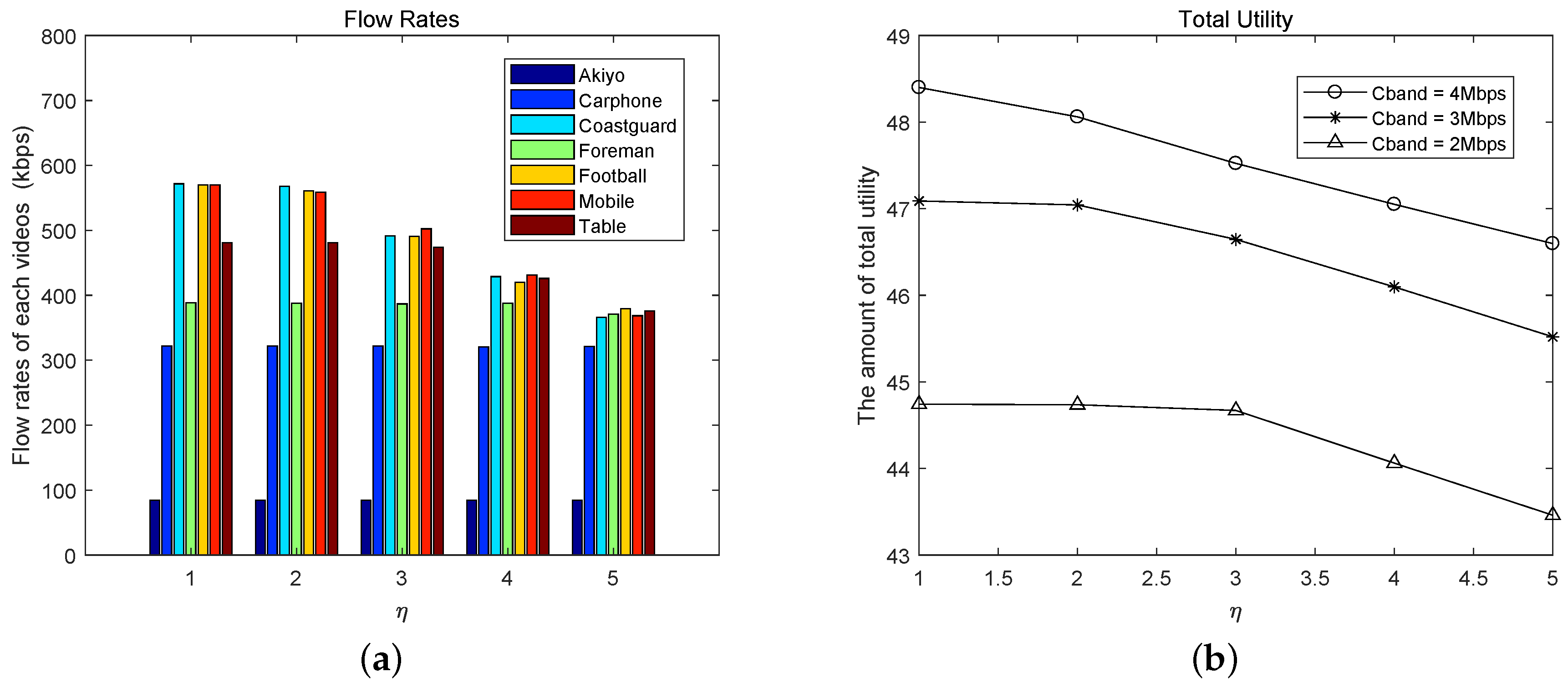
6.4. Influence of the Cost Factor
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Razi, P.; Sumantyo, J.T.S.; Perissin, D.; Kuze, H.; Chua, M.Y.; Panggabean, G.F. 3D Land Mapping and Land Deformation Monitoring Using Persistent Scatterer Interferometry (PSI) ALOS PALSAR: Validated by Geodetic GPS and UAV. IEEE Access 2018, 6, 12395–12404. [Google Scholar] [CrossRef]
- Alvear, O.; Calafate, C.T.; Zema, N.R.; Natalizio, E.; Hernández-Orallo, E.; Cano, J.-C.; Manzoni, P. A Discretized Approach to Air Pollution Monitoring Using UAV-based Sensing. Mob. Netw. Appl. 2018. [Google Scholar] [CrossRef]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Yu, C.; Wang, J.; Shan, J.; Xin, M. Multi-UAV UWA video surveillance system. In Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016. [Google Scholar] [CrossRef]
- Brunnström, K.; Beker, S.A.; Moor, K.D.; Dooms, A.; Egger, S.; Garcia, M.N.; Hossfeld, T.; Jumiskopyykkö, S.; Keimel, C.; Larabi, M.C.; et al. Qualinet White Paper on Definitions of Quality of Experience. Available online: https://hal.archives-ouvertes.fr/hal-00977812/ (accessed on 12 March 2013).
- Barman, N.; Martini, M.G. QoE Modeling for HTTP Adaptive Video Streaming–A Survey and Open Challenges. IEEE Access 2019, 7, 30831–30859. [Google Scholar] [CrossRef]
- Zhao, T.; Liu, Q.; Chen, C.W. QoE in Video Transmission: A User Experience-Driven Strategy. IEEE Commun. Surv. Tutor. 2017, 19, 285–302. [Google Scholar] [CrossRef]
- Hemmati, M.; Yassine, A.; Shirmohammadi, S. An online learning approach to QoE-fair distributed rate allocation in multi-user video streaming. In Proceedings of the 8th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 15–17 December 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Essaili, A.E.; Schroeder, D.; Steinbach, E.; Staehle, D.; Shehada, M. QoE-Based Traffic and Resource Management for Adaptive HTTP Video Delivery in LTE. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 988–1001. [Google Scholar] [CrossRef]
- Deng, Z.; Liu, Y.; Liu, J.; Zhou, X.; Ci, S. QoE-Oriented Rate Allocation for Multipath High-Definition Video Streaming Over Heterogeneous Wireless Access Networks. IEEE Syst. J. 2017, 11, 2524–2535. [Google Scholar] [CrossRef]
- Elgabli, A.; Elghariani, A.; Aggarwal, V.; Bell, M. QoE-Aware Resource Allocation for Small Cells. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y. Reinforcement Learning in Multiple-UAV Networks: Deployment and Movement Design. IEEE Trans. Veh. Technol. 2019, 1. [Google Scholar] [CrossRef]
- Gao, A.; Hu, Y.; Liang, W.; Lin, Y.; Li, L.; Li, X. A QoE-Oriented Scheduling Scheme for Energy-Efficient Computation Offloading in UAV Cloud System. IEEE Access 2019, 7, 68656–68668. [Google Scholar] [CrossRef]
- Colonnese, S.; Cuomo, F.; Pagliari, G.; Chiaraviglio, L. Q-SQUARE: A Q-learning approach to provide a QoE aware UAV flight path in cellular networks. Ad Hoc Netw. 2019, 101872. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A Survey on Cluster-Based Routing Protocols for Unmanned Aerial Vehicle Networks. IEEE Access 2019, 7, 498–516. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Zhou, Z.; Dong, M.; Ota, K.; Wang, G.; Yang, L.T. Energy-Efficient Resource Allocation for D2D Communications Underlaying Cloud-RAN-Based LTE-A Networks. IEEE Int. Things J. 2016, 3, 428–438. [Google Scholar] [CrossRef]
- Cumino, P.; Lobato Junior, W.; Tavares, T.; Santos, H.; Rosário, D.; Cerqueira, E.; Villas, L.A.; Gerla, M. Cooperative UAV Scheme for Enhancing Video Transmission and Global Network Energy Efficiency. Sensors 2018, 18, 4155. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Zhang, Y.; Shi, Y.; Zeng, Q. Joint resource allocation and admission control mechanism in software defined mobile networks. China Commun. 2019, 16, 33–45. [Google Scholar] [CrossRef]
- Duan, R.; Wang, J.; Jiang, C.; Yao, H.; Ren, Y.; Qian, Y. Resource Allocation for Multi-UAV Aided IoT NOMA Uplink Transmission Systems. IEEE Int. Things J. 2019, 1. [Google Scholar] [CrossRef]
- Gong, J.; Lin, J.; Chang, T.; Shen, C.; Chen, X. Distributed Power Allocation for UAV-Assisted Multi-User Relay Networks. In Proceedings of the 11th International Symposium on Communication Systems, Networks Digital Signal Processing (CSNDSP), Budapest, Hungary, 18–20 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Yan, S.; Peng, M.; Cao, X. A Game Theory Approach for Joint Access Selection and Resource Allocation in UAV Assisted IoT Communication Networks. IEEE Int. Things J. 2019, 6, 1663–1674. [Google Scholar] [CrossRef]
- Zhang, G.; Yan, H.; Zeng, Y.; Cui, M.; Liu, Y. Trajectory Optimization and Power Allocation for Multi-Hop UAV Relaying Communications. IEEE Access 2018, 6, 48566–48576. [Google Scholar] [CrossRef]
- Jiang, M.; Li, Y.; Zhang, Q.; Qin, J. Joint Position and Time Allocation Optimization of UAV Enabled Time Allocation Optimization Networks. IEEE Trans. Commun. 2019, 67, 3806–3816. [Google Scholar] [CrossRef]
- Moura, J.; Hutchison, D. Game Theory for Multi-Access Edge Computing: Survey, Use Cases, and Future Trends. IEEE Commun. Surv. Tutor. 2019, 21, 260–288. [Google Scholar] [CrossRef]
- Yuan, H.; Wei, X.; Yang, F.; Xiao, J.; Kwong, S. Cooperative Bargaining Game-Based Multiuser Bandwidth Allocation for Dynamic Adaptive Streaming Over HTTP. IEEE Trans. Multimed. 2018, 20, 183–197. [Google Scholar] [CrossRef]
- Ruan, L.; Chen, J.; Guo, Q.; Jiang, H.; Zhang, Y.; Liu, D. A Coalition Formation Game Approach for Efficient Cooperative Multi-UAV Deployment. Appl. Sci. 2018, 8, 2427. [Google Scholar] [CrossRef]
- Dong, C.; Wen, W. Joint Optimization for Task Offloading in Edge Computing: An Evolutionary Game Approach. Sensors 2019, 19, 740. [Google Scholar] [CrossRef]
- Liu, B.; Xu, H.; Zhou, X. Stackelberg Dynamic Game-Based Resource Allocation in Threat Defense for Internet of Things. Sensors 2018, 18, 4074. [Google Scholar] [CrossRef]
- Nasser, A.; Muta, O.; Elsabrouty, M.; Gacanin, H. Interference Mitigation and Power Allocation Scheme for Downlink MIMO-NOMA HetNet. IEEE Trans. Veh. Technol. 2019, 68, 6805–6816. [Google Scholar] [CrossRef]
- Zhu, K.; Niyato, D.; Wang, P. Optimal Bandwidth Allocation with Dynamic Service Selection in Heterogeneous Wireless Networks. In Proceedings of the IEEE Global Telecommunications Conference GLOBECOM 2010, Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, L. Joint Spectrum Allocation and Pricing for Cognitive Multi-Homing Networks. IEEE Trans. Cogn. Commun. Netw. 2018, 4, 597–606. [Google Scholar] [CrossRef]
- Monderer, D.; Shapley, L.S. Potential Games. Games Econ. Behav. 1996, 14, 143. [Google Scholar] [CrossRef]
- Chen, X.; Huang, J. Spatial Spectrum Access Game. IEEE Trans. Mob. Comput. 2015, 14, 646–659. [Google Scholar] [CrossRef]
- Ke, M.; Li, D.; Tian, S.; Zhang, Y.; Tong, K.; Xu, Y. Distributed Power Allocation for Wireless Sensor Network Localization: A Potential Game Approach. Sensors 2018, 18, 1480. [Google Scholar] [CrossRef]
- Wu, D.; Tian, Y.; Wang, Y.; Wu, C. QoE-based distributed multichannel allocation in small-cell networks: A potential-matching game solution. In Proceedings of the IEEE/CIC International Conference on Communications in China (ICCC), Chengdu, China, 27–29 July 2016. [Google Scholar] [CrossRef]
- Hu, H.; Wen, Y.N.D. Spectrum Allocation and Bitrate Adjustment for Mobile Social Video Sharing: A Potential Game with Online QoS Learning Approach. IEEE J. Sel. Areas Commun. 2017, 35, 935–948. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT Framework Views and Challenges: Towards Protecting Drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef]
- Barman, N.; Zadtootaghaj, S.; Schmidt, S.; Martini, M.G.; Möller, S. An objective and subjective quality assessment study of passive gaming video streaming. Int. J. Netw. Manag. 2018, e2054. [Google Scholar] [CrossRef]
- Huynh-Thu, Q.; Ghanbari, M. Scope of validity of PSNR in image/video quality assessment. Electron. Lett. 2008, 44, 800. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.S.E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Seshadrinathan, K.; Bovik, A. Motion Tuned Spatio-Temporal Quality Assessment of Natural Videos. IEEE Trans. Image Process. 2010, 19, 335–350. [Google Scholar] [CrossRef]
- Ou, Y.F.; Ma, Z.; Liu, T.; Wang, Y. Perceptual Quality Assessment of Video Considering Both Frame Rate and Quantization Artifacts. IEEE Trans. Circuits Syst. Video Technol. 2011, 21, 286–298. [Google Scholar] [CrossRef]
- Ou, Y.; Xue, Y.; Wang, Y. Q-STAR: A Perceptual Video Quality Model Considering Impact of Spatial, Temporal, and Amplitude Resolutions. IEEE Trans. Image Process. 2014, 23, 2473–2486. [Google Scholar] [CrossRef]
- Khan, S.; Duhovnikov, S.; Steinbach, E.; Kellerer, W. MOS-based Multiuser Multiapplication Cross-layer Optimization for Mobile Multimedia Communication. Adv. MultiMed. 2007, 2007, 6. [Google Scholar] [CrossRef]
- Thakolsri, S.; Kellerer, W.; Steinbach, E. QoE-Based Cross-Layer Optimization of Wireless Video with Unperceivable Temporal Video Quality Fluctuation. In Proceedings of the IEEE International Conference on Communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Moorthy, A.K.; Seshadrinathan, K.; Soundararajan, R.; Bovik, A.C. Wireless Video Quality Assessment: A Study of Subjective Scores and Objective Algorithms. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 587–599. [Google Scholar] [CrossRef]
- Seshadrinathan, K.; Soundararajan, R.; Bovik, A.C.; Cormack, L.K. Study of Subjective and Objective Quality Assessment of Video. IEEE Trans. Image Process. 2010, 19, 1427–1441. [Google Scholar] [CrossRef]
- Ma, L.; Reznik, Y.; Vanam, R.; Sternberg, G. Enabling QoE-based scheduling for video teleconferencing via PSNR time series prediction. Proc. SPIE 2013, 8856. [Google Scholar] [CrossRef]
- Wu, D.; Li, X.; Li, H. QoE-aware video cooperative caching and transmission mechanism based on TWDM-PON and C-RAN. J. Commun. 2019, 40, 80–91. [Google Scholar] [CrossRef]
- Choi, L.U.; Ivrlac, M.T.; Steinbach, E.; Nossek, J.A. Sequence-level models for distortion-rate behaviour of compressed video. In Proceedings of the IEEE International Conference on Image Processing 2005, Genova, Italy, 14 September 2005; Volume 2. [Google Scholar] [CrossRef]
- Voorneveld, M. Best-response potential games. Econ. Lett. 2000, 66, 295. [Google Scholar] [CrossRef]
- Scutari, G.; Barbarossa, S.; Palomar, D.P. Potential Games: A Framework for Vector Power Control Problems With Coupled Constraints. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, Toulouse, France, 14–19 May 2006; Volume 4, p. IV. [Google Scholar] [CrossRef]
- Hart, S.; Mas-Colell, A. A Simple Adaptive Procedure Leading to Correlated Equilibrium. Econometrica 2000, 68, 1127–1150. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, B.; Liu, K.J.R. Multiuser rate allocation games for multimedia communications. IEEE Trans. Multimed. 2009, 11, 1170–1181. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Akiyo | 1.5119 | 84.5447 | slow motion and smooth scene |
| Carphone | 20.2554 | 322.0153 | medium motion and smooth scene |
| Table | 12.7781 | 481.1014 | medium motion and smooth scene |
| Foreman | 17.8168 | 388.7091 | medium motion and smooth scene |
| Coastguard | 28.4987 | 878.8011 | medium motion and complex scene |
| Football | 286.311 | 1720 | fast or complex motion |
| Mobile | 225.0682 | 1610 | fast or complex motion |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Xie, Z.; Tian, C. A QoE-Oriented Uplink Allocation for Multi-UAV Video Streaming. Sensors 2019, 19, 3394. https://doi.org/10.3390/s19153394
He C, Xie Z, Tian C. A QoE-Oriented Uplink Allocation for Multi-UAV Video Streaming. Sensors. 2019; 19(15):3394. https://doi.org/10.3390/s19153394
Chicago/Turabian StyleHe, Chao, Zhidong Xie, and Chang Tian. 2019. "A QoE-Oriented Uplink Allocation for Multi-UAV Video Streaming" Sensors 19, no. 15: 3394. https://doi.org/10.3390/s19153394
APA StyleHe, C., Xie, Z., & Tian, C. (2019). A QoE-Oriented Uplink Allocation for Multi-UAV Video Streaming. Sensors, 19(15), 3394. https://doi.org/10.3390/s19153394