POF Smart Carpet: A Multiplexed Polymer Optical Fiber-Embedded Smart Carpet for Gait Analysis

 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
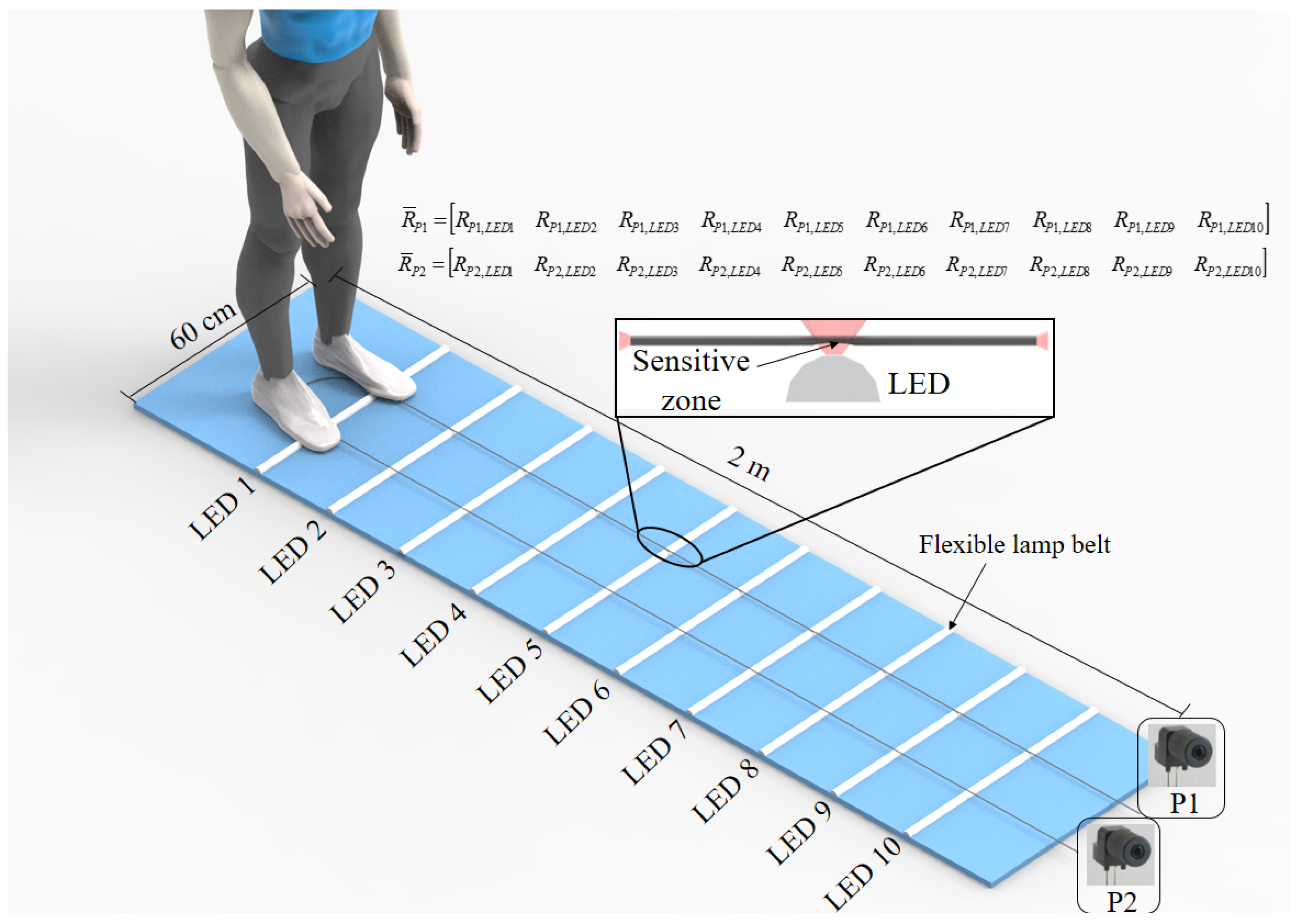
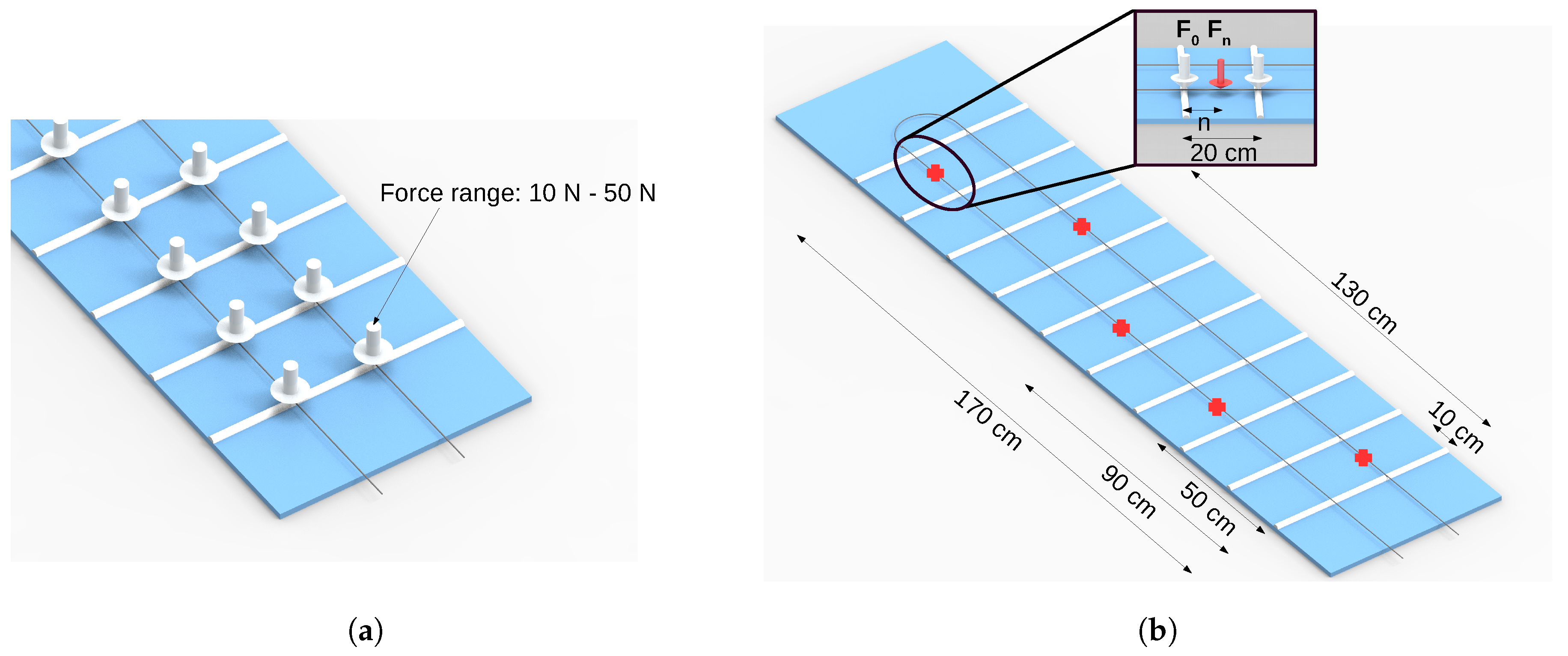
2. POF Smart Carpet Development and Experimental Procedures
3. Results and Discussion
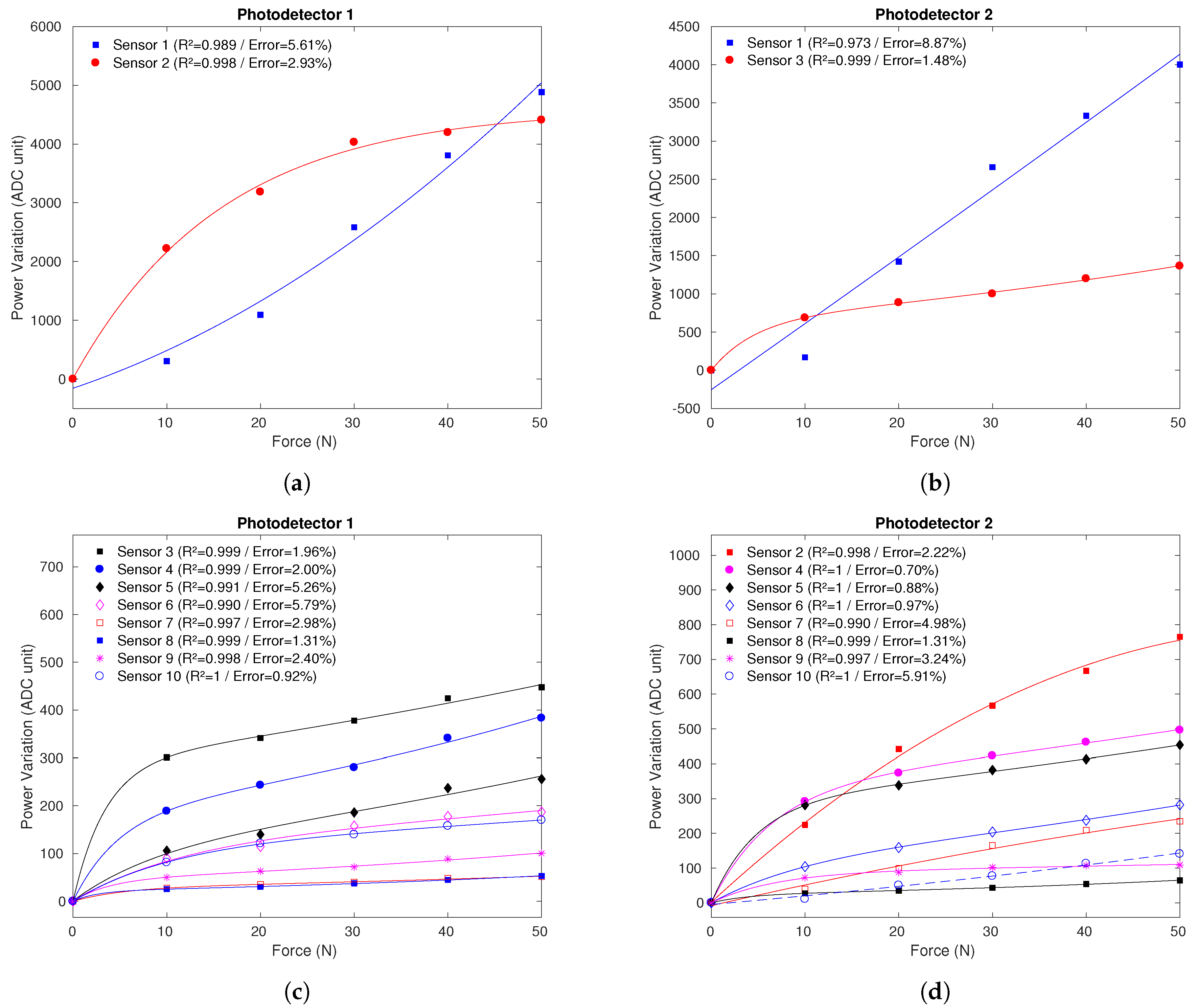
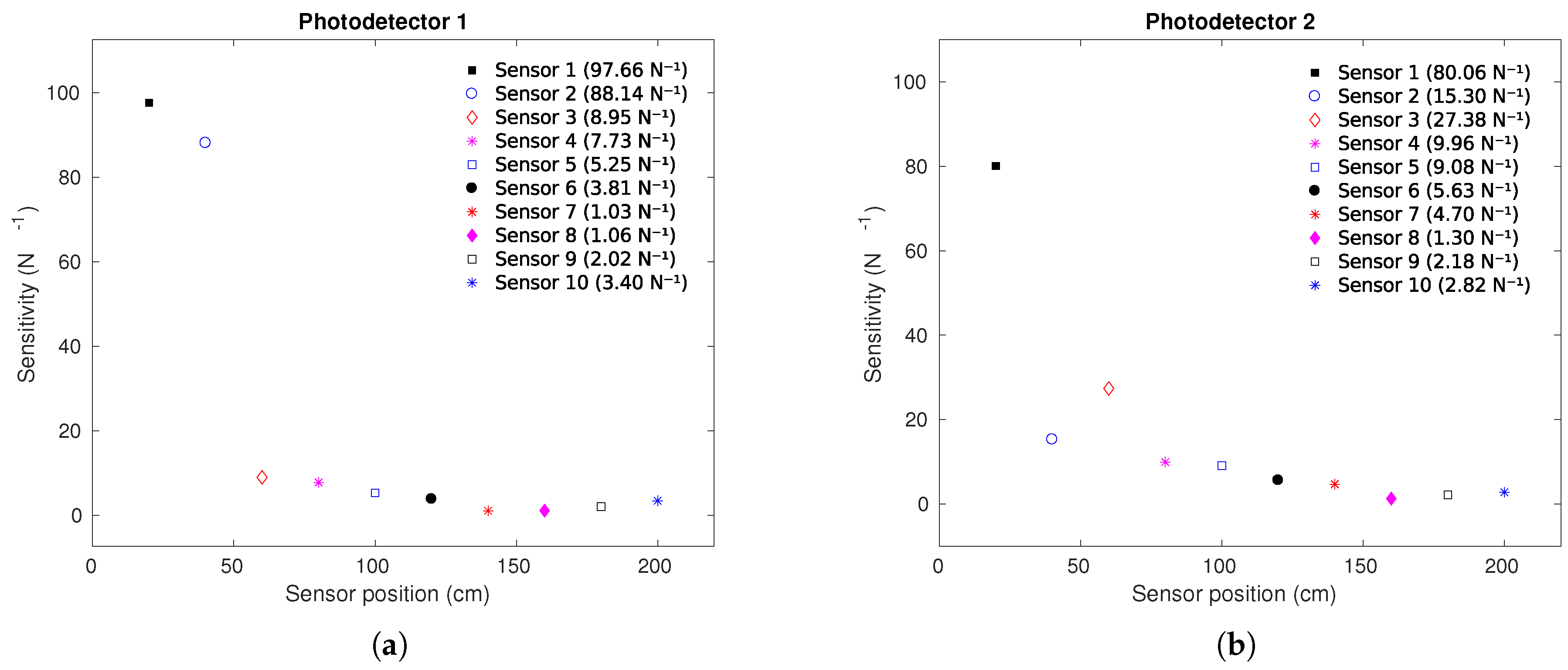
3.1. POF Smart Carpet Characterizations
3.2. POF Smart Carpet Validation in Walking Test
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kirtley, C. Clinical Gait Analysis: Theory and Practice, 1st ed.; Elsevier B.V.: London, UK, 2006; p. 328. [Google Scholar]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait partitioning methods: A systematic review. Sensors 2016, 16, 66. [Google Scholar] [CrossRef] [PubMed]
- Whittle, M. Gait Analysis: An Introduction, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2007; p. 255. [Google Scholar]
- Fraccaro, P.; Walsh, L.; Doyle, J.; O’Sullivan, D. Real-world Gyroscope-based Gait Event Detection and Gait Feature Extraction. In Proceedings of the 6th International Conference on eHealth, Telemedicine, and Social Medicine, Barcelona, Spain, 23–27 March 2014. [Google Scholar]
- Moulianitis, V.C.; Syrimpeis, V.N.; Aspragathos, N.A.; Elias, C. A Closed-Loop Drop-Foot Correction System with Gait Event Detection from the Contralateral Lower Limb using Fuzzy Logic. In Proceedings of the 10th International Workshop on Biomedical Engineering, Kos, Greece, 5–7 October 2011; pp. 1–4. [Google Scholar]
- Alaqtash, M.; Yu, H.; Brower, R.; Abdelgawad, A.; Sarkodie-gyan, T. Application of wearable sensors for human gait analysis using fuzzy computational algorithm. Eng. Appl. Artif. Intell. 2011, 24, 1018–1025. [Google Scholar] [CrossRef]
- Hanlon, M.; Anderson, R. Real-time gait event detection using wearable sensors. Gait Posture 2009, 30, 523–527. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Rossi, S.; Palermo, E.; Patanè, F.; Cappa, P. A Novel HMM Distributed Classifier for the Detection of Gait Phases by Means of a Wearable Inertial Sensor Network. Sensors 2014, 14, 16212–16234. [Google Scholar] [CrossRef] [PubMed]
- Kadoya, S.; Nagaya, N.; Konyo, M.; Tadokoro, S. A Precise Gait Phase Detection Based on High-Frequency Vibration on Lower Limbs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1852–1857. [Google Scholar]
- Mariani, B.; Rouhani, H.; Crevoisier, X.; Aminian, K. Quantitative estimation of foot-flat and stance phase of gait using foot-worn inertial sensors. Gait Posture 2013, 37, 229–234. [Google Scholar] [CrossRef] [PubMed]
- Abaid, N.; Cappa, P.; Palermo, E.; Petrarca, M.; Porfiri, M. Gait Detection in Children with and without Hemiplegia Using Single-Axis Wearable Gyroscopes. PLoS ONE 2013, 8, e73152. [Google Scholar] [CrossRef]
- Wong, C.; Zhang, Z.Q.; Lo, B.; Yang, G.Z. Wearable Sensing for Solid Biomechanics: A Review. IEEE Sens. J. 2015, 15, 2747–2760. [Google Scholar] [CrossRef]
- Valencia-jimenez, N.; Leal-junior, A.; Avellar, L.; Vargas-Valencia, L.; Caicedo-Rodríguez, P.; Ramírez-Duque, A.A.; Lyra, M.; Marques, C.; Bastos, T.; Frizera, A. A Comparative Study of Markerless Systems Based on Color-Depth Cameras, Polymer Optical Fiber Curvature Sensors, and Inertial Measurement Units: Towards Increasing the Accuracy in Joint Angle Estimation. Electronics 2019, 8, 173. [Google Scholar] [CrossRef]
- Muro-de-la Herran, A.; García-Zapirain, B.; Méndez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef]
- Shu, L.; Hua, T.; Wang, Y.; Qiao Li, Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar] [CrossRef]
- Sanderson, D.J.; Franks, I.M.; Elliot, D. The effects of targeting on the ground reaction forces during level walking. Hum. Mov. Sci. 1993, 12, 327–337. [Google Scholar] [CrossRef]
- Peters, K. Polymer optical fiber sensors—A review. Smart Mater. Struct. 2011, 10, 013002. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Marques, C.; Ribeiro, M.R.N.; Pontes, M.J.; Frizera, A. FBG-Embedded 3D Printed ABS Sensing Pads: The Impact of Infill Density on Sensitivity and Dynamic Range in Force Sensors. IEEE Sens. J. 2018, 18, 8381–8388. [Google Scholar] [CrossRef]
- Leal-junior, A.; Theodosiou, A.; Díaz, C.; Marques, C.; Pontes, M.J.; Kalli, K.; Frizera-Neto, A. Fiber Bragg Gratings in CYTOP Fiber Embedded in a 3D-printed Flexible Support for Human-Robot Interaction Forces Assessment. Materials 2018, 11, 2305. [Google Scholar] [CrossRef]
- Sartiano, D.; Sales, S. Low Cost Plastic Optical Fiber Pressure Sensor Embedded in Mattress for Vital Signal Monitoring. Sensors 2017, 17, 2900. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Díaz, C.R.; Leitão, C.; José, M.; Marques, C. Polymer optical fiber-based sensor for simultaneous measurement of breath and heart rate under dynamic movements. Opt. Laser Technol. 2019, 109, 429–436. [Google Scholar] [CrossRef]
- Bilro, L.; Alberto, N.; Pinto, J.L.; Nogueira, R. Optical Sensors Based on Plastic Fibers. Sensors 2012, 12, 12184–12207. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Frizera, A.; Avellar, L.M.; Marques, C. Polymer Optical Fiber for In-Shoe Monitoring of Ground Reaction Forces During the Gait. IEEE Sens. J. 2018, 18, 2362–2368. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Frizera, A.; Theodosiou, A.; Díaz, C.; Jimenez, M.; Min, R.; Pontes, M.J.; Kalli, K.; Marques, C. Plane-by-Plane Written, Low-Loss Polymer Optical Fiber Bragg Grating Arrays for Multiparameter Sensing in a Smart Walker. IEEE Sens. J. 2019, 1748. [Google Scholar] [CrossRef]
- Costilla-reyes, O.; Scully, P.; Ozanyan, K.B.; Member, S. Temporal Pattern Recognition in Gait Activities Recorded With a Footprint Imaging Sensor System. IEEE Sens. J. 2016, 16, 8815–8822. [Google Scholar] [CrossRef]
- Stupar, D.Z.; Member, S.; Baji, J.S.; Member, S.; Manojlovi, L.M.; Slankamenac, M.P.; Jo, A.V. Wearable Low-Cost System for Human Joint Movements Monitoring Based on Fiber-Optic Curvature Sensor. IEEE Sens. J. 2012, 12, 3424–3431. [Google Scholar] [CrossRef]
- Minardo, A.; Bernini, R.; Zeni, L. Distributed Temperature Sensing in Polymer Optical Fiber by BOFDA. IEEE Photonics Technol. Lett. 2014, 26, 387–390. [Google Scholar] [CrossRef]
- Luo, Y.; Yan, B.; Zhang, Q.; Peng, G.D.; Wen, J. Fabrication of Polymer Optical Fibre (POF) Gratings. Sensors 2017, 17, 511. [Google Scholar] [CrossRef]
- Pospori, A.; Webb, D.J. Stress Sensitivity Analysis of Optical Fiber Bragg erot Interferometric Sensors. J. Light. Technol. 2017, 35, 2654–2659. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Díaz, C.R.; Marques, C.; Pontes, M.J.; Frizera, A. Multiplexing technique for quasi-distributed sensors arrays in polymer optical fiber intensity variation-based sensors. Opt. Laser Technol. 2019, 111, 81–88. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Díaz, C.R.; Marques, C.; José, M. 3D-printed POF insole: Development and applications of a low-cost, highly customizable device for plantar pressure and ground reaction forces monitoring. Opt. Laser Technol. 2019, 116, 256–264. [Google Scholar] [CrossRef]
- Leal-junior, A.G.; Frizera, A.; Pontes, M.J. Sensitive zone parameters and curvature radius evaluation for polymer optical fiber curvature sensors. Opt. Laser Technol. 2018, 100, 272–281. [Google Scholar] [CrossRef]
- Hibbeler, R.C. Mechanics of Materials, 7th ed.; Number c, Pearson: London, UK, 2008; p. 637. [Google Scholar]
- Hausdorff, J.M. Gait variability: methods, modeling and meaning. J. Neuroeng. Rehabil. 2005, 2, 1–9. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voluntary 1 | Voluntary 2 | Voluntary 3 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Test 1 | Test 2 | Test 3 | Test 1 | Test 2 | Test 3 | Test 1 | Test 2 | Test 3 | ||
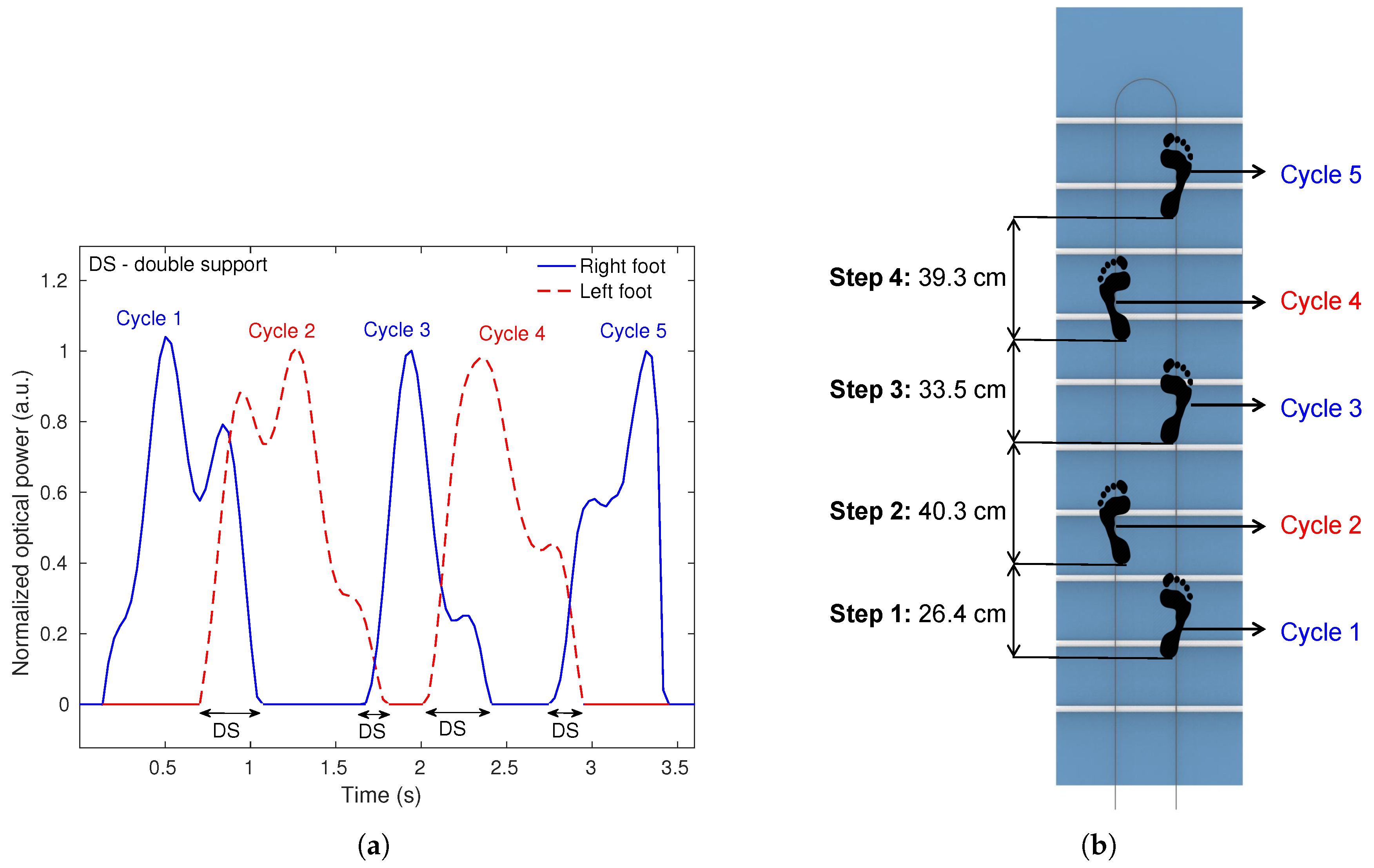
| Step length (cm) | Step 1 | 26.4 | 42.9 | 16.5 | 46.5 | 35.2 | 30.3 | 56.5 | 39.5 | 38 |
| Step 2 | 40.3 | 31.9 | 56.9 | 35.5 | 35.6 | 51.1 | 31.0 | 35.2 | 31.1 | |
| Step 3 | 33.5 | 42.1 | 48.1 | 27.0 | 39.0 | 34.7 | 40.6 | 55.0 | 56.4 | |
| Step 4 | 39.3 | 37.1 | 27.2 | 35.7 | 34.8 | 27.8 | 31.7 | 10.7 | 14.9 | |
| Stride length (cm) | Stride 1 | 66.7 | 74.9 | 73.5 | 82.0 | 70.8 | 81.4 | 87.5 | 74.7 | 69.1 |
| Stride 2 | 73.8 | 74.1 | 105.0 | 62.5 | 74.6 | 85.8 | 71.6 | 90.2 | 87.5 | |
| Stride 3 | 72.9 | 79.3 | 75.3 | 62.7 | 73.8 | 62.6 | 72.3 | 65.7 | 71.3 | |
| Cadence (steps/min) | - | 81.8 | 62.5 | 63.4 | 44.3 | 44.8 | 46.9 | 59.6 | 60.0 | 65.7 |
| Stance duration (%) | - | 60.9% | 69.4% | 58.0% | 54.3% | 60.2% | 65.4% | 65.8% | 68.5% | 64.9% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Avellar, L.M.; Leal-Junior, A.G.; Diaz, C.A.R.; Marques, C.; Frizera, A. POF Smart Carpet: A Multiplexed Polymer Optical Fiber-Embedded Smart Carpet for Gait Analysis. Sensors 2019, 19, 3356. https://doi.org/10.3390/s19153356
Avellar LM, Leal-Junior AG, Diaz CAR, Marques C, Frizera A. POF Smart Carpet: A Multiplexed Polymer Optical Fiber-Embedded Smart Carpet for Gait Analysis. Sensors. 2019; 19(15):3356. https://doi.org/10.3390/s19153356
Chicago/Turabian StyleAvellar, Leticia M., Arnaldo G. Leal-Junior, Camilo A. R. Diaz, Carlos Marques, and Anselmo Frizera. 2019. "POF Smart Carpet: A Multiplexed Polymer Optical Fiber-Embedded Smart Carpet for Gait Analysis" Sensors 19, no. 15: 3356. https://doi.org/10.3390/s19153356
APA StyleAvellar, L. M., Leal-Junior, A. G., Diaz, C. A. R., Marques, C., & Frizera, A. (2019). POF Smart Carpet: A Multiplexed Polymer Optical Fiber-Embedded Smart Carpet for Gait Analysis. Sensors, 19(15), 3356. https://doi.org/10.3390/s19153356