Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network


Abstract
:1. Introduction
- Here we formulated the channel allocation problem to maximize system throughput as a linear optimization problem.
- This work presented two algorithms to solve the NP-hard problem for channel allocation in both shared and non-shared channel access.
- We present a Distributed MAC design for shared channel access by integrating MAC overhead into channel allocation.
- The model design brings a trade-off between maximizing system throughput and reducing collision, which is experimentally proven.
- The proposed MAC design is adaptive in nature, for instance, with city, highway and rural, which is experimentally shown.
2. Related Work
3. Problem Formulation
4. Performance Enriched Channel Allocation (PECA) Algorithm
4.1. Non-Shared Channel Allocation Algorithm (NSCA)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1: Non-Shared Channel Allocation Algorithm |
| Step 1. Input set of accessible channel & for . |
| Step 2. For |
| Step 3. . |
| Step 4. If () then |
| Step 5. Obtain , where and are the throughputs before and after channel allocation . |
| Step 6. Else |
| Step 7. Obtain . |
| Step 8. End If |
| Step 9. End For |
| Step 10. . |
| Step 11. Allocate channel to vehicle . |
| Step 12. Update . |
| Step 13. If is empty, terminate the process. |
| Step 14. Else, go to step 2. |
4.2. Shared Channel Allocation Algorithm (SCA)
| Algorithm 2: Shared channel Allocation |
| Step 1. Input set of assigned channels vehicles for and |
| Step 2. Execute Algorithm 1 to get channel allocated for a single vehicle. |
| Step 3. Let the set of channels that are shared by vehicles be and be the group of vehicles which share channel and set . |
| Step 4. ; ; . |
| Step 5. While do |
| Step 6. Obtain the set of channels shared by vehicles |
| Step 7. For |
| Step 8. For |
| Step 9. If then |
| Step 10. . |
| Step 11. Else |
| Step 12. User computes considering that channel is assigned to vehicle . |
| Step 13. End If |
| Step 14. End For |
| Step 15. . |
| Step 16. End For |
| Step 17. . |
| Step 18. If and then |
| Step 19. Set . |
| Step 20. Go to step 35. |
| Step 21. End If |
| Step 22. If then |
| Step 23. Provisionally allocate channel to vehicle , i.e., update . |
| Step 24. Compute and with using Equations (11) and (12), respectively. |
| Step 25. If then |
| Step 26. . |
| Step 27. Return to Step 7 using the updated . |
| Step 28. Else |
| Step 29. Update (i.e., allocate channel to vehicle ), compute & with , & update . |
| Step 30. Update . |
| Step 31. End If. |
| Step 32. End If. |
| Step 33. Return to step 7. |
| Step 34. . |
| Step 35. End While |
4.3. Contention Window Computation
4.4. MAC Overhead Computation
5. Simulation Analysis and Result
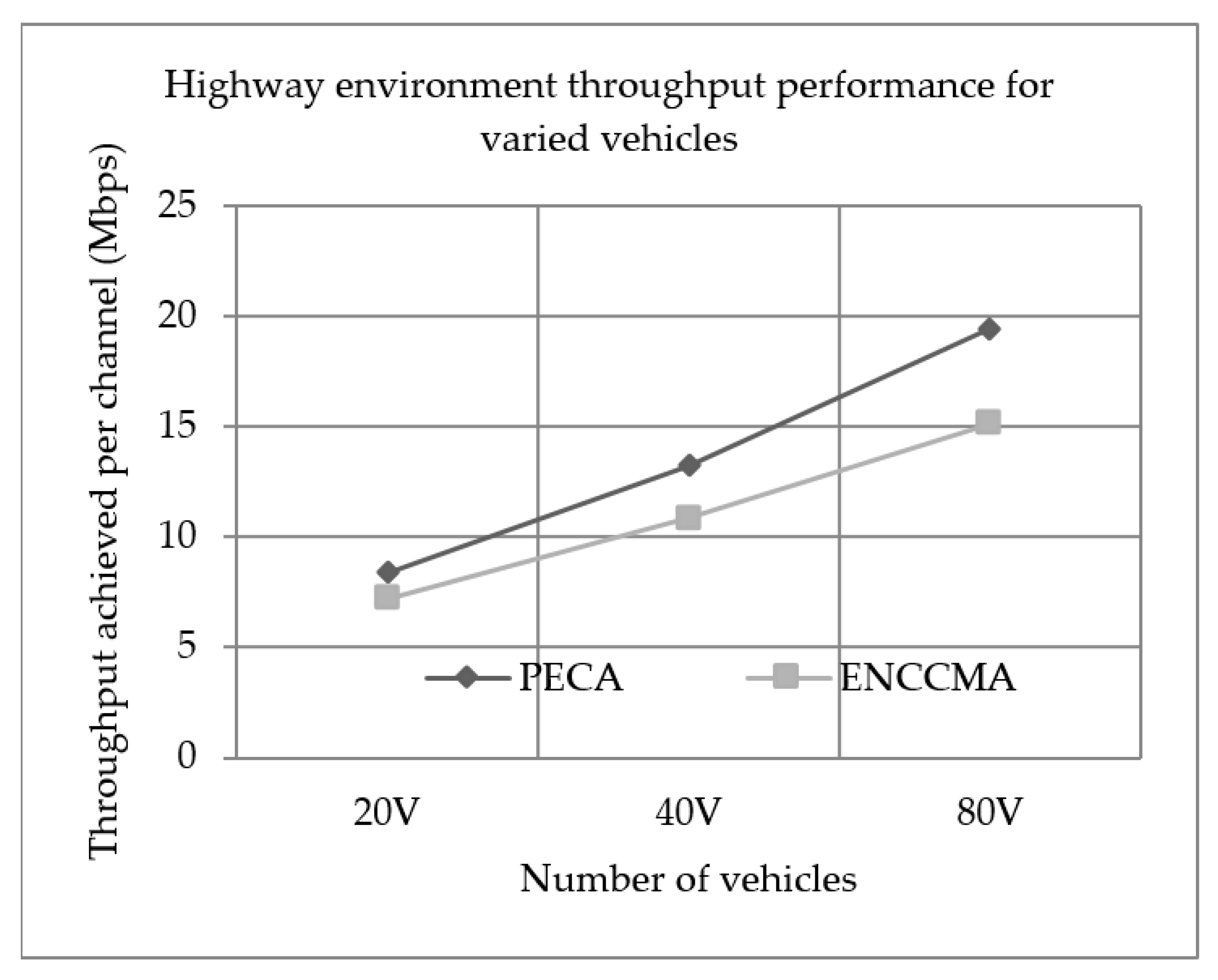
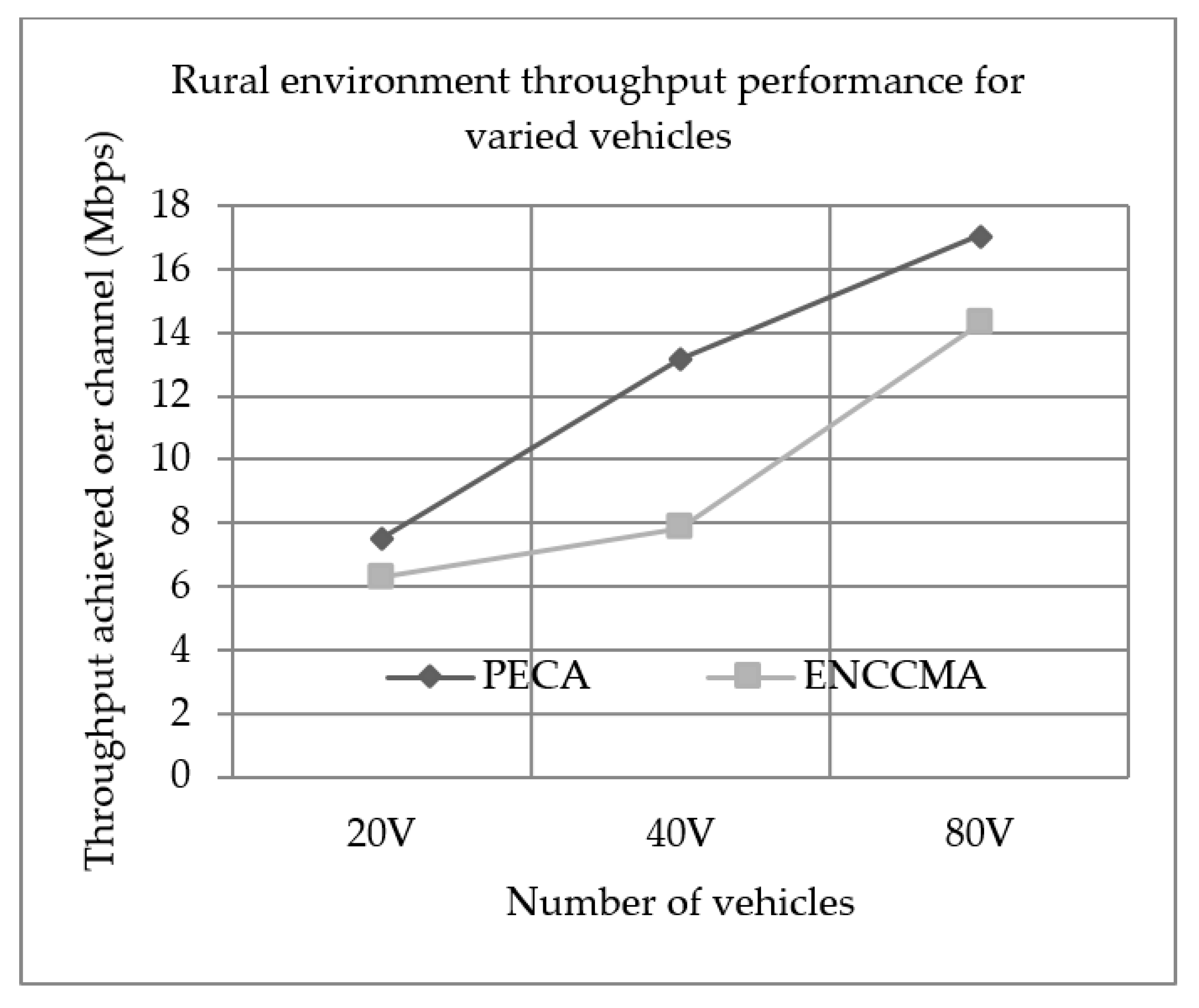
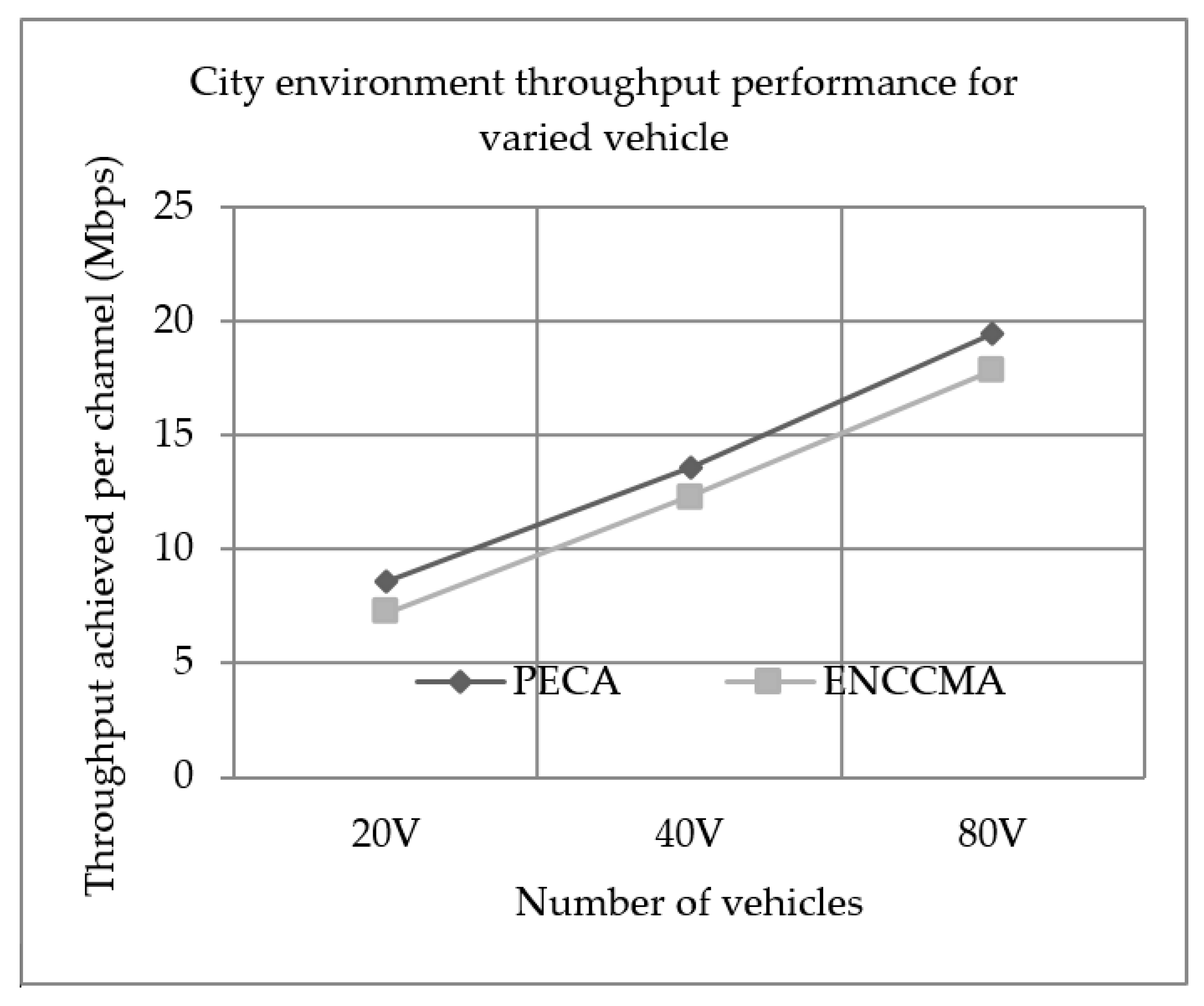
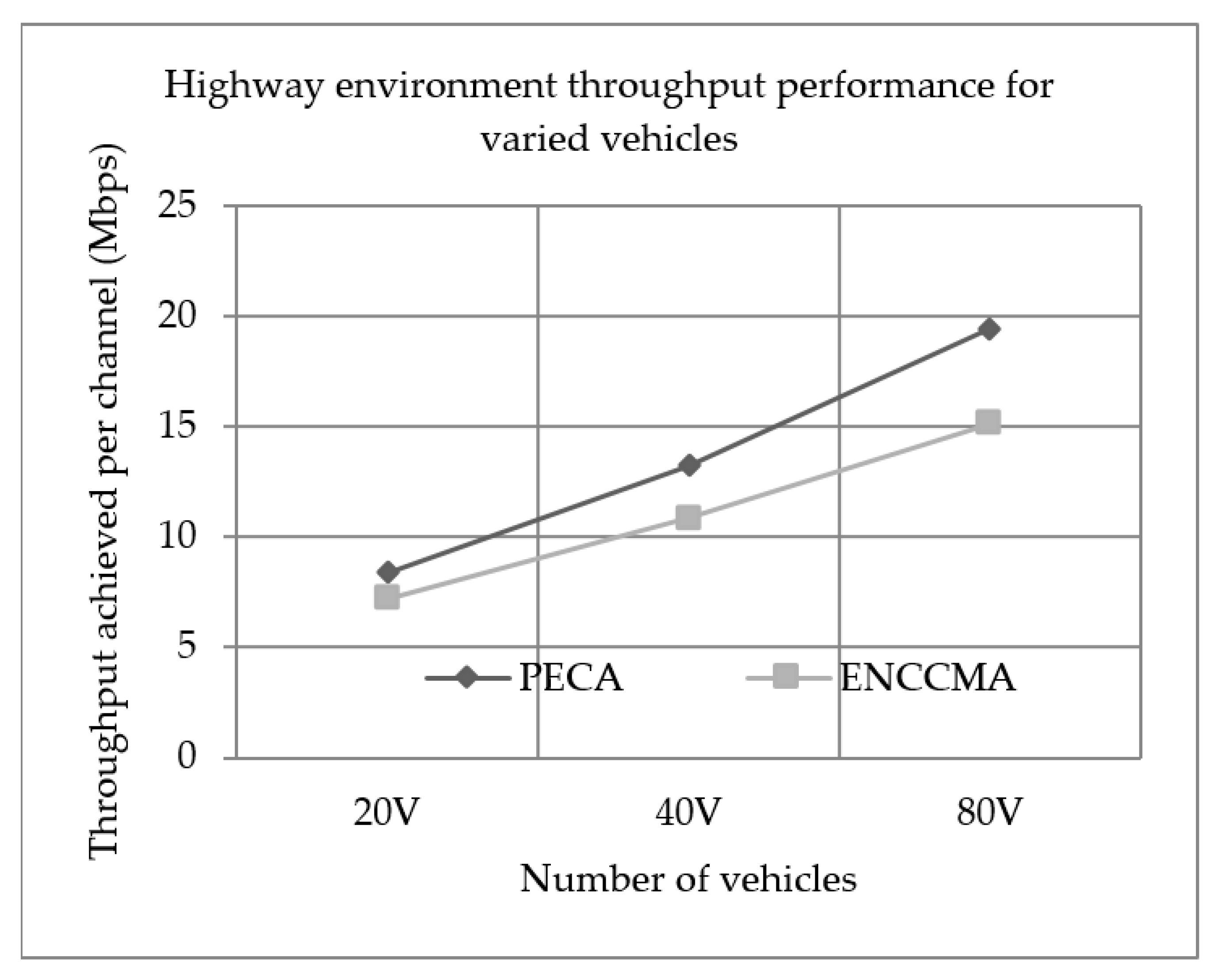
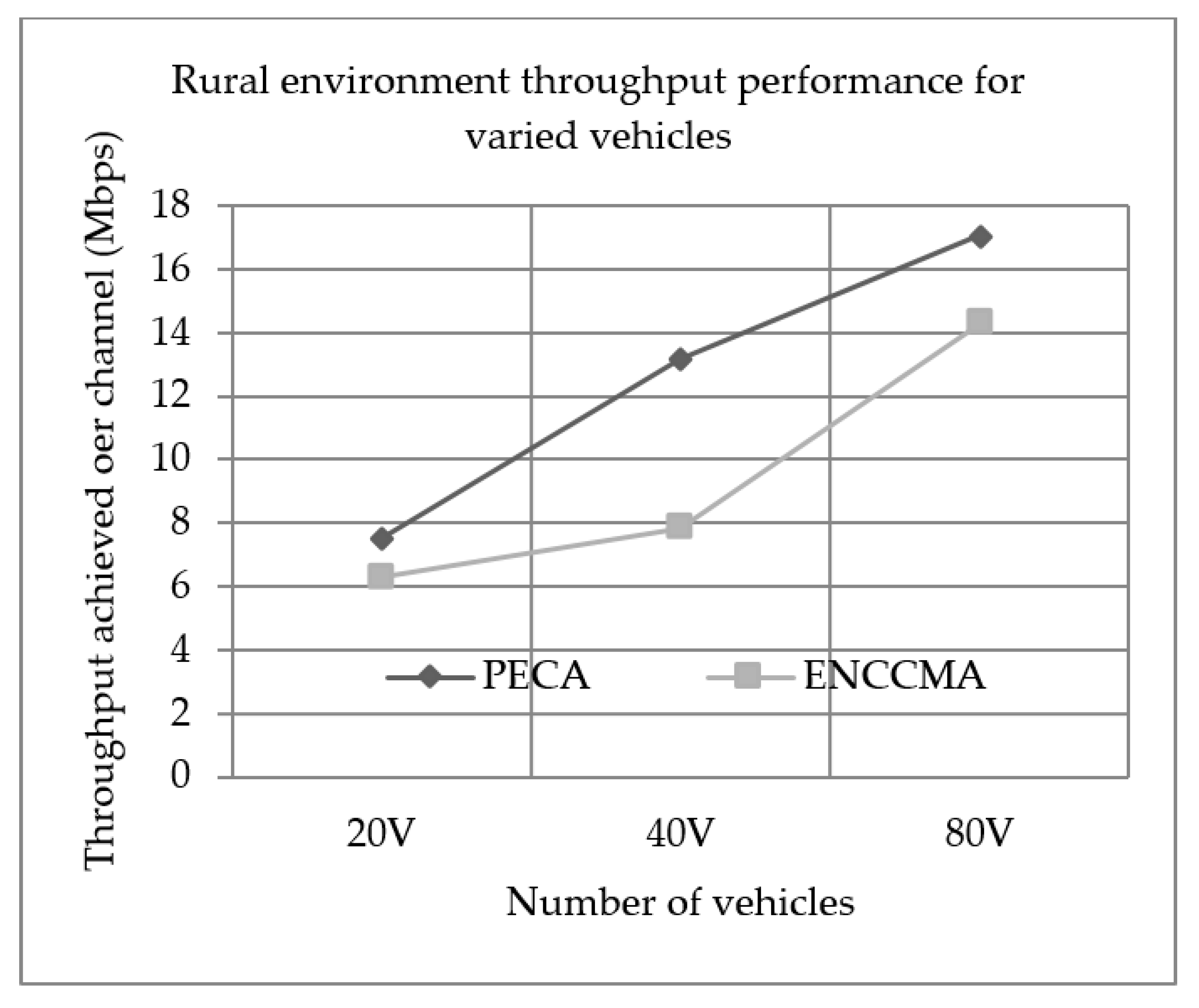
5.1. Throughput Performance
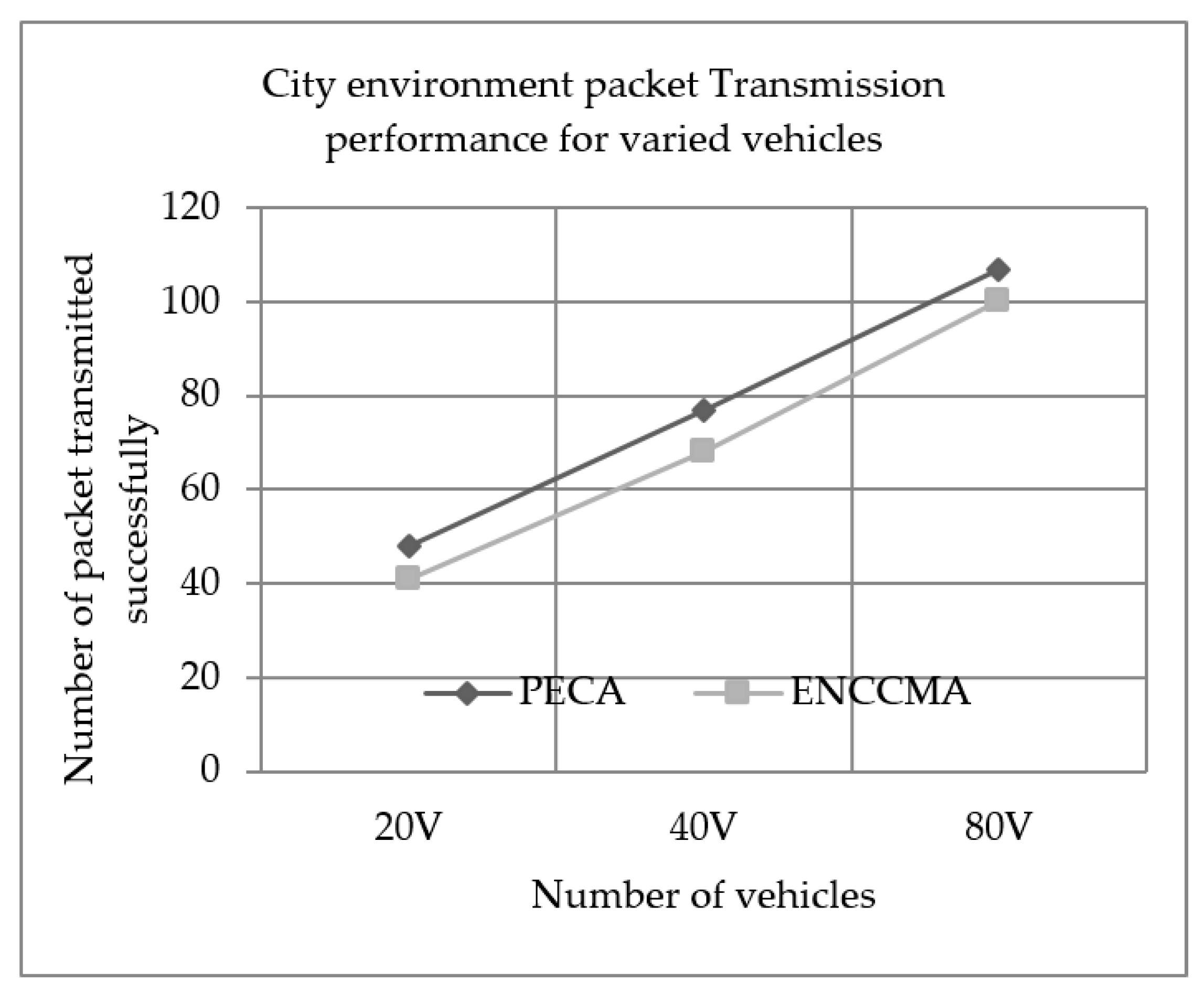
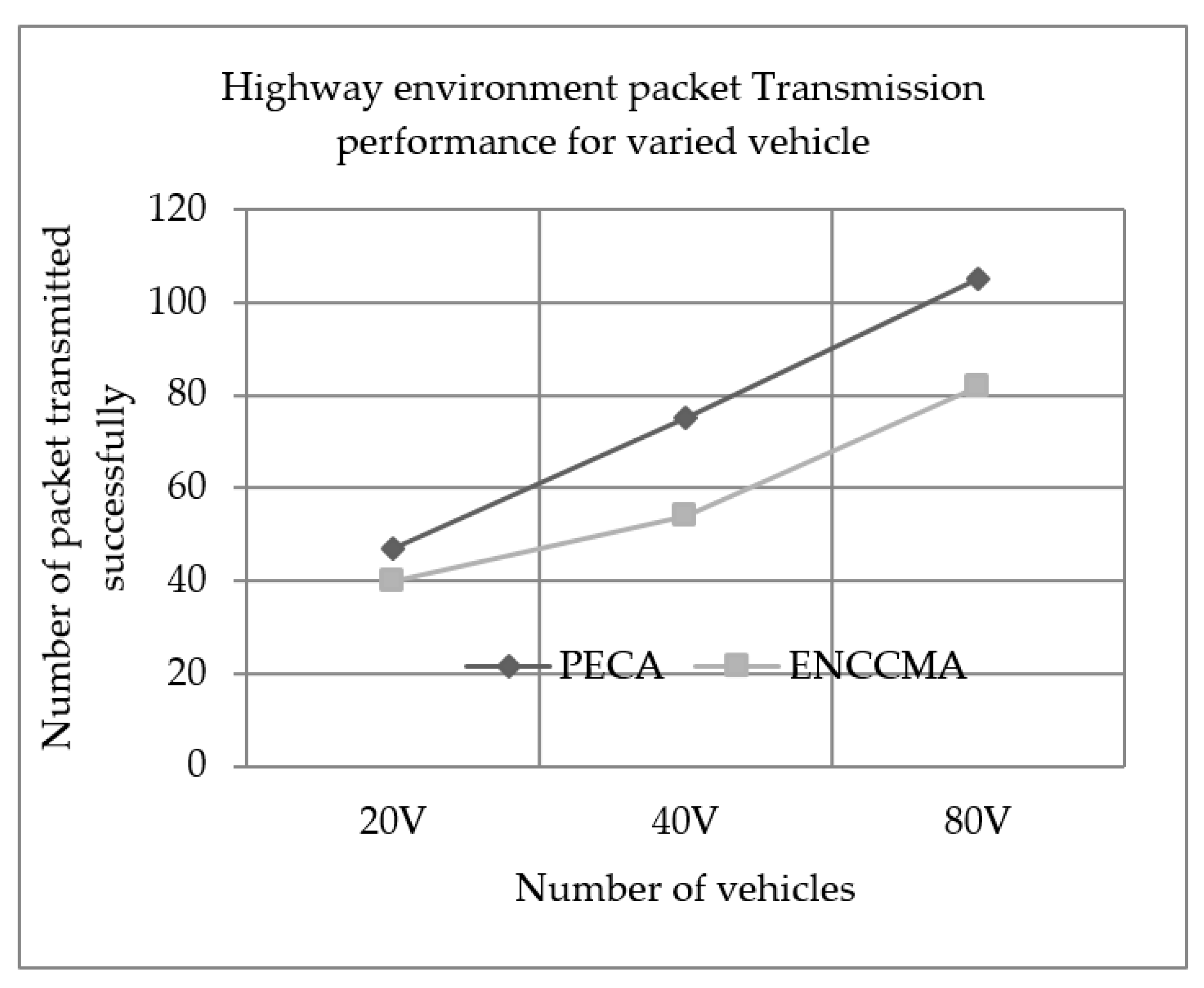
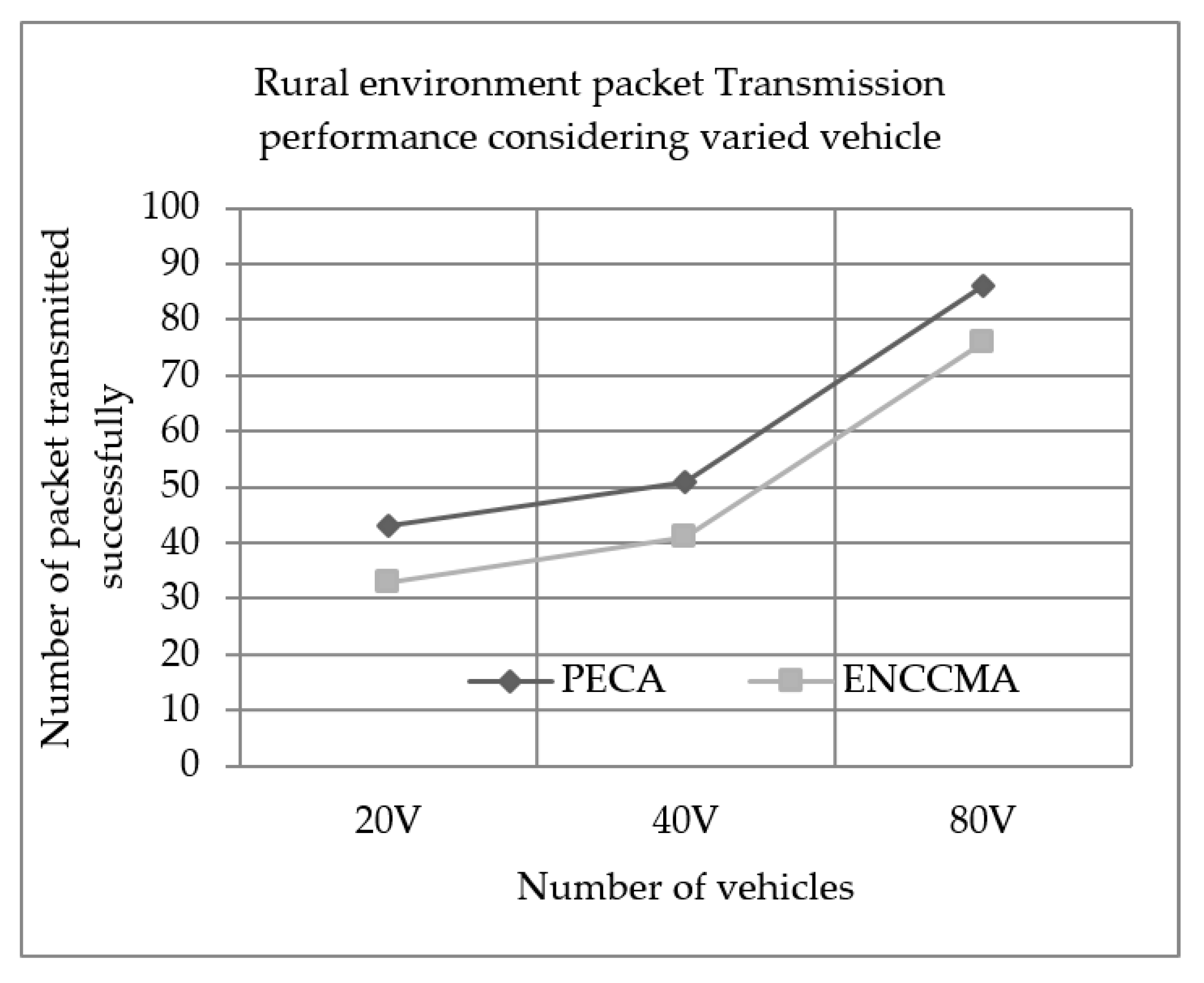
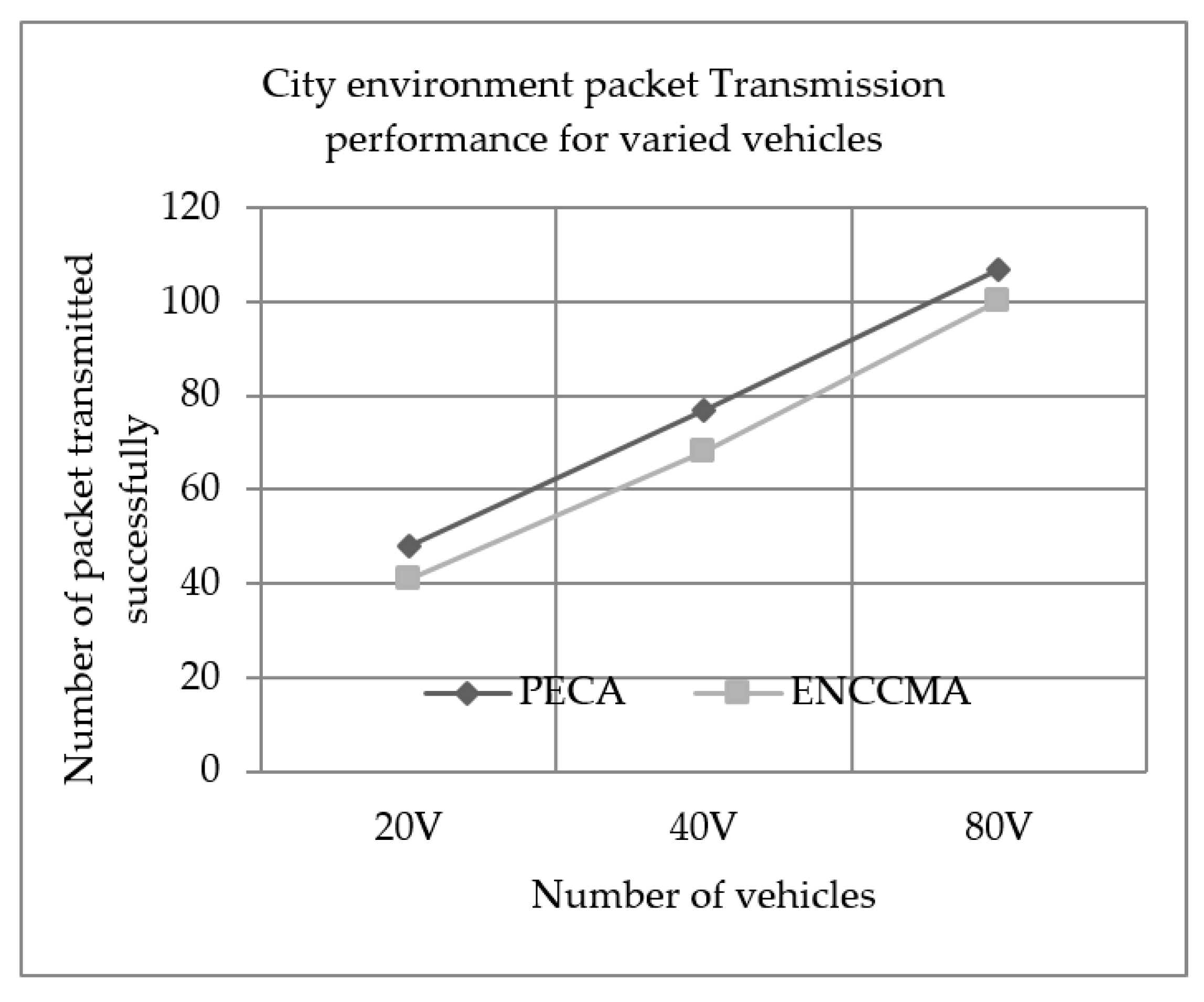
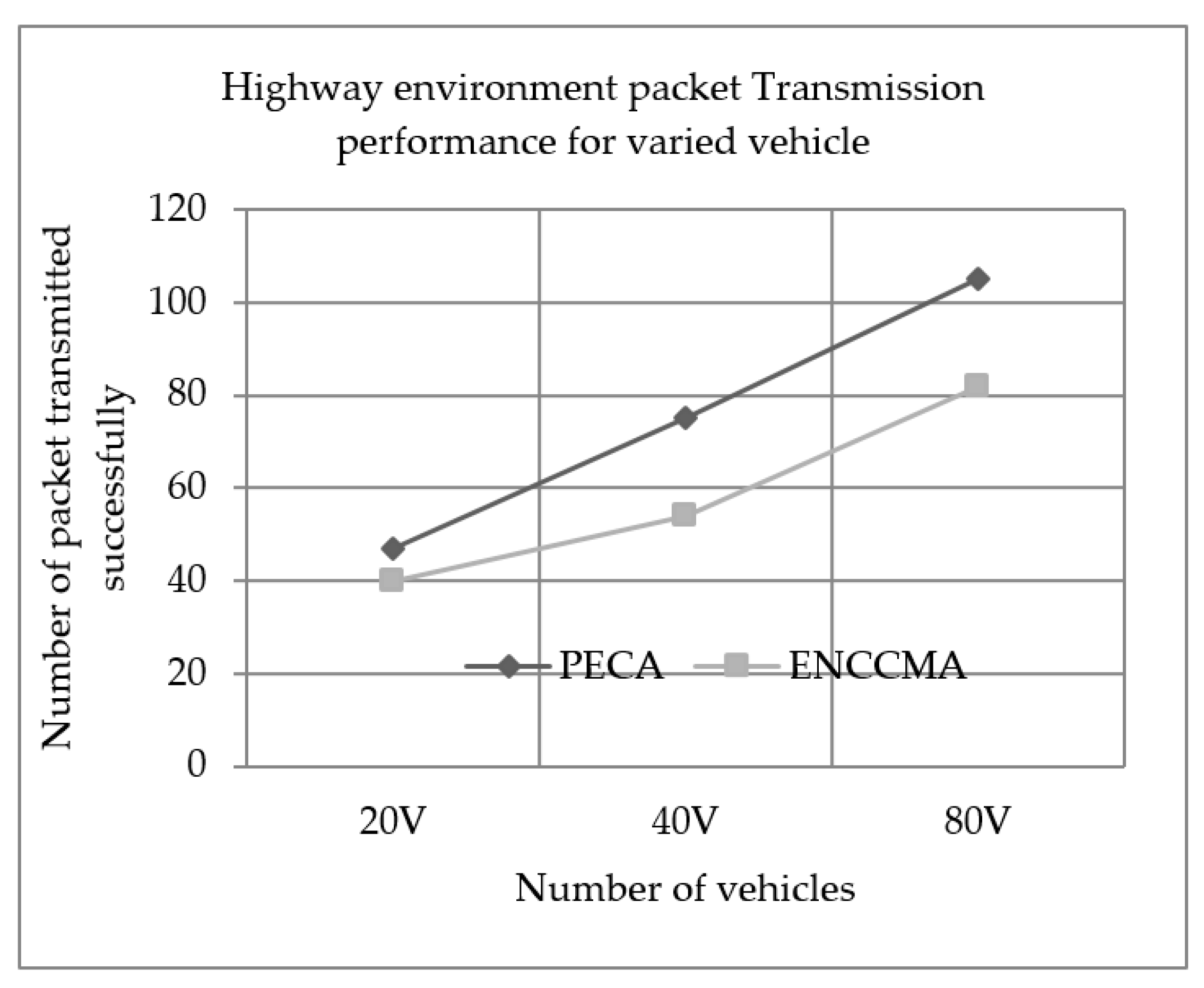
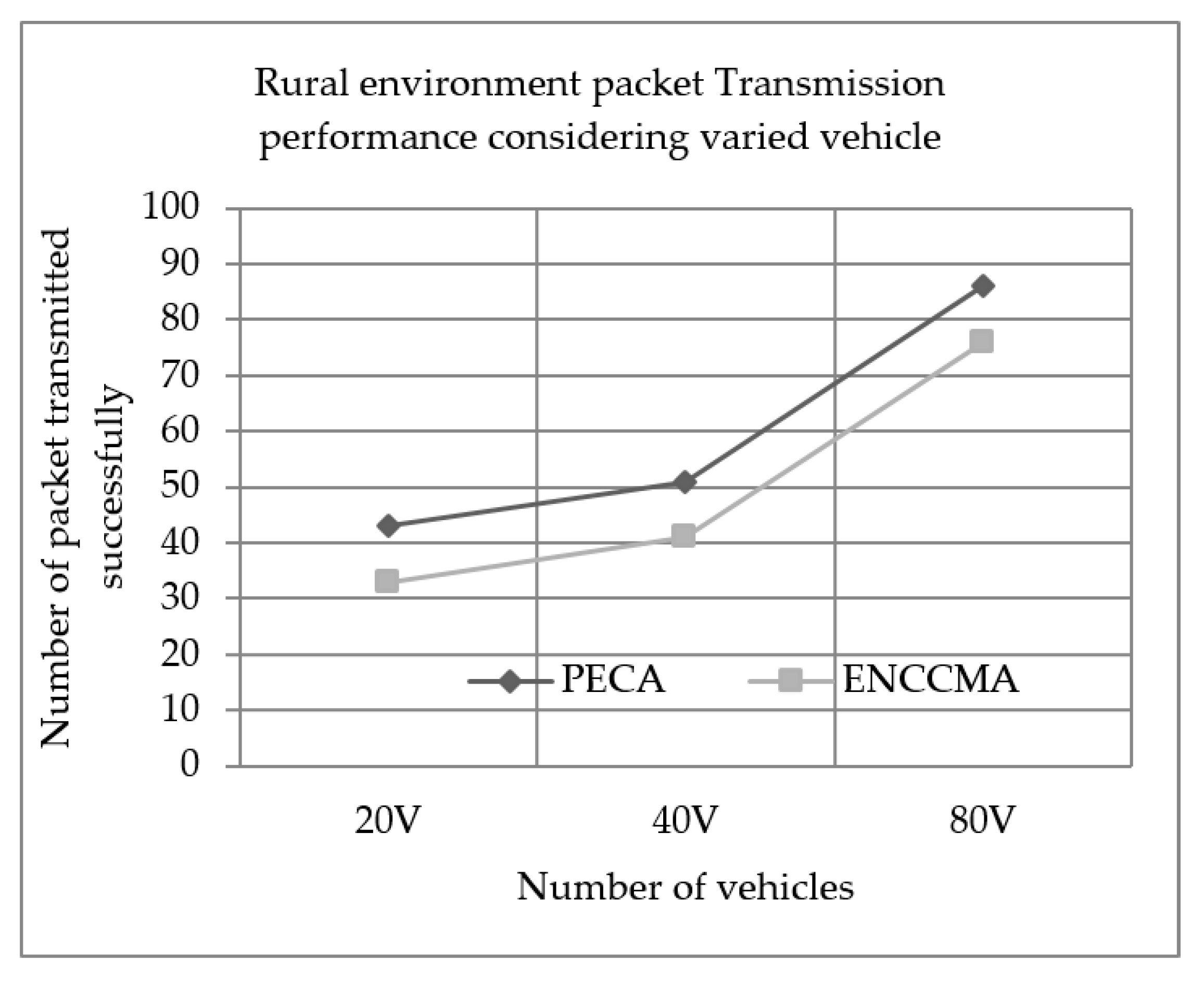
5.2. Successful Packet Transmission Performance
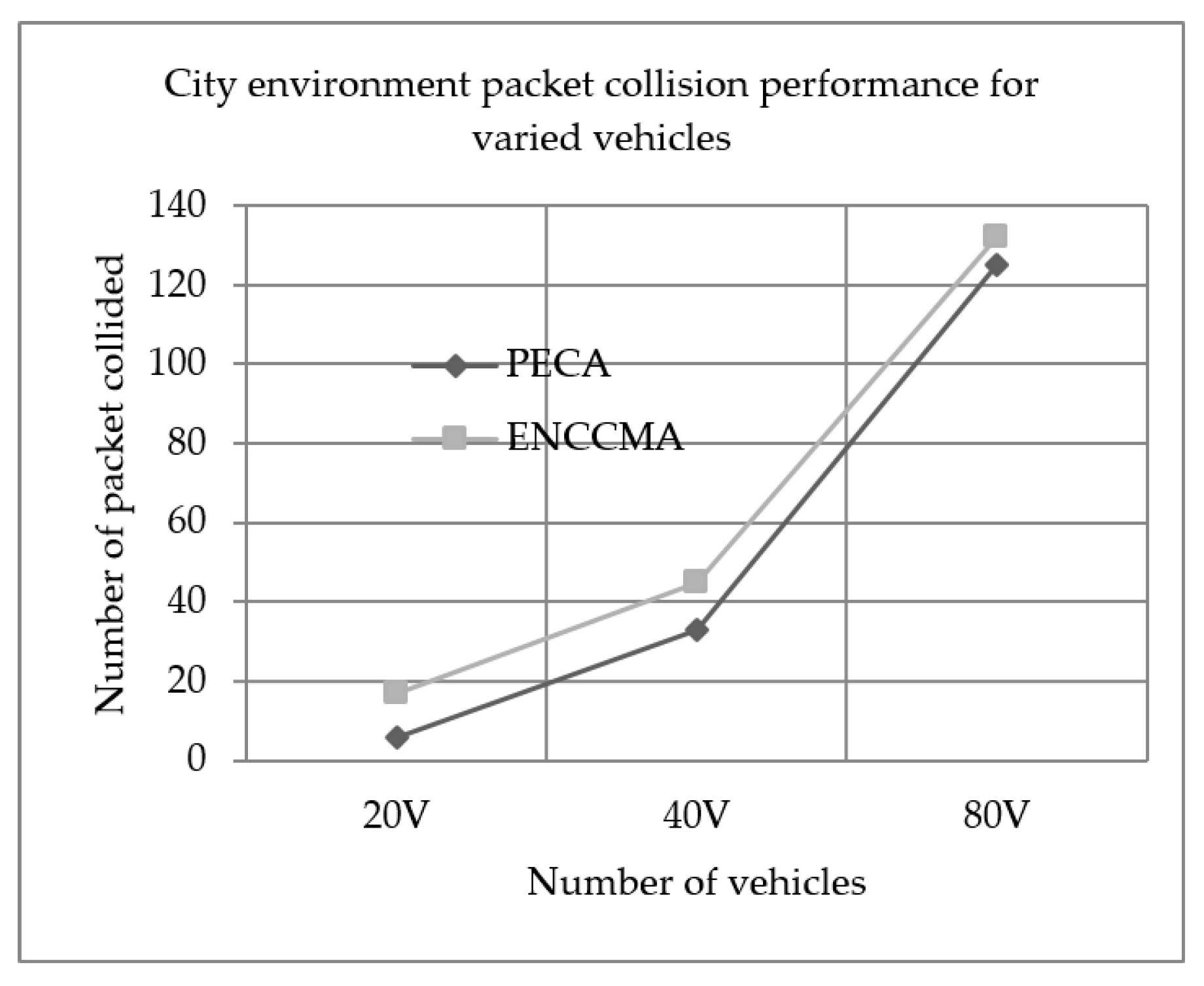
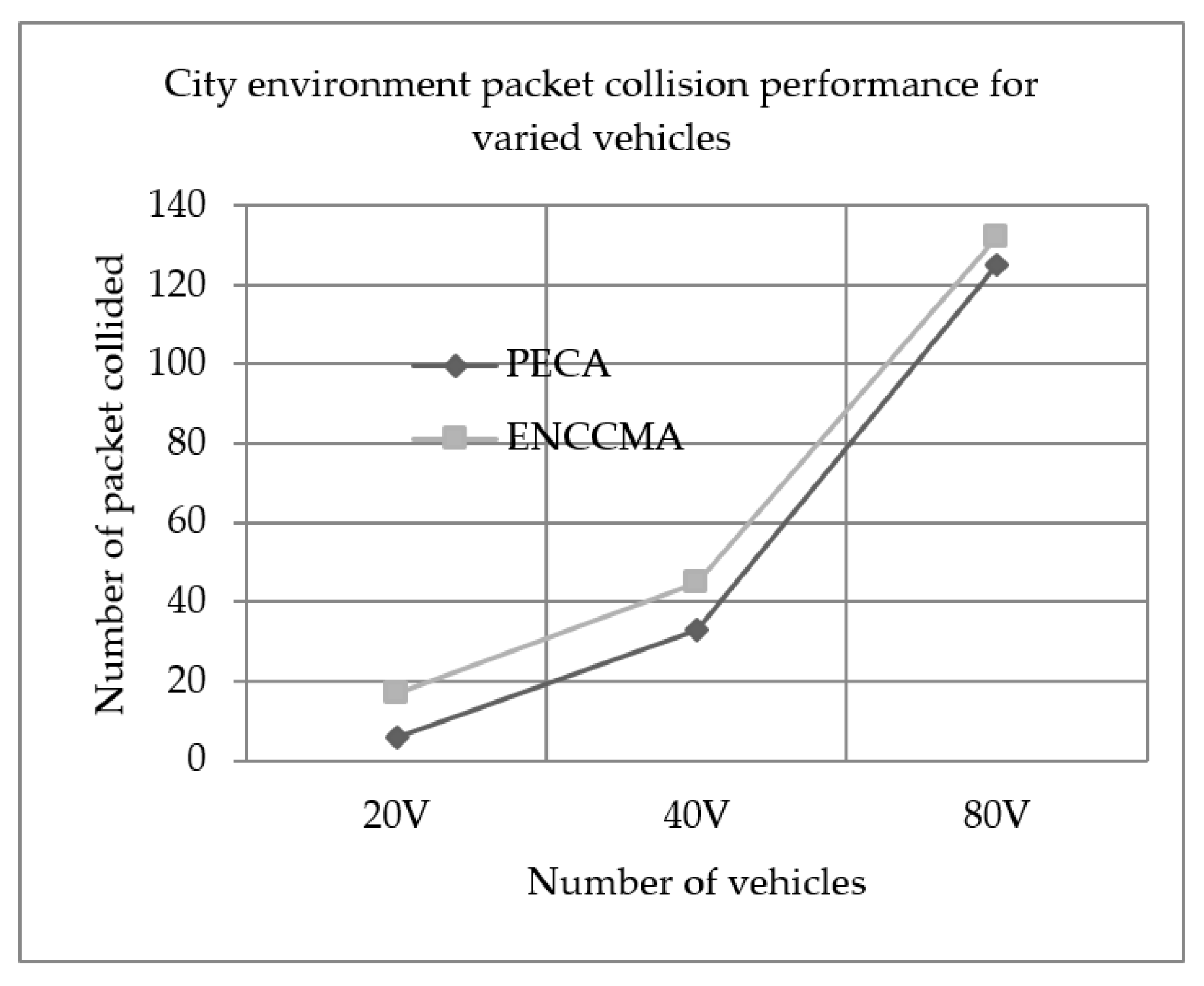
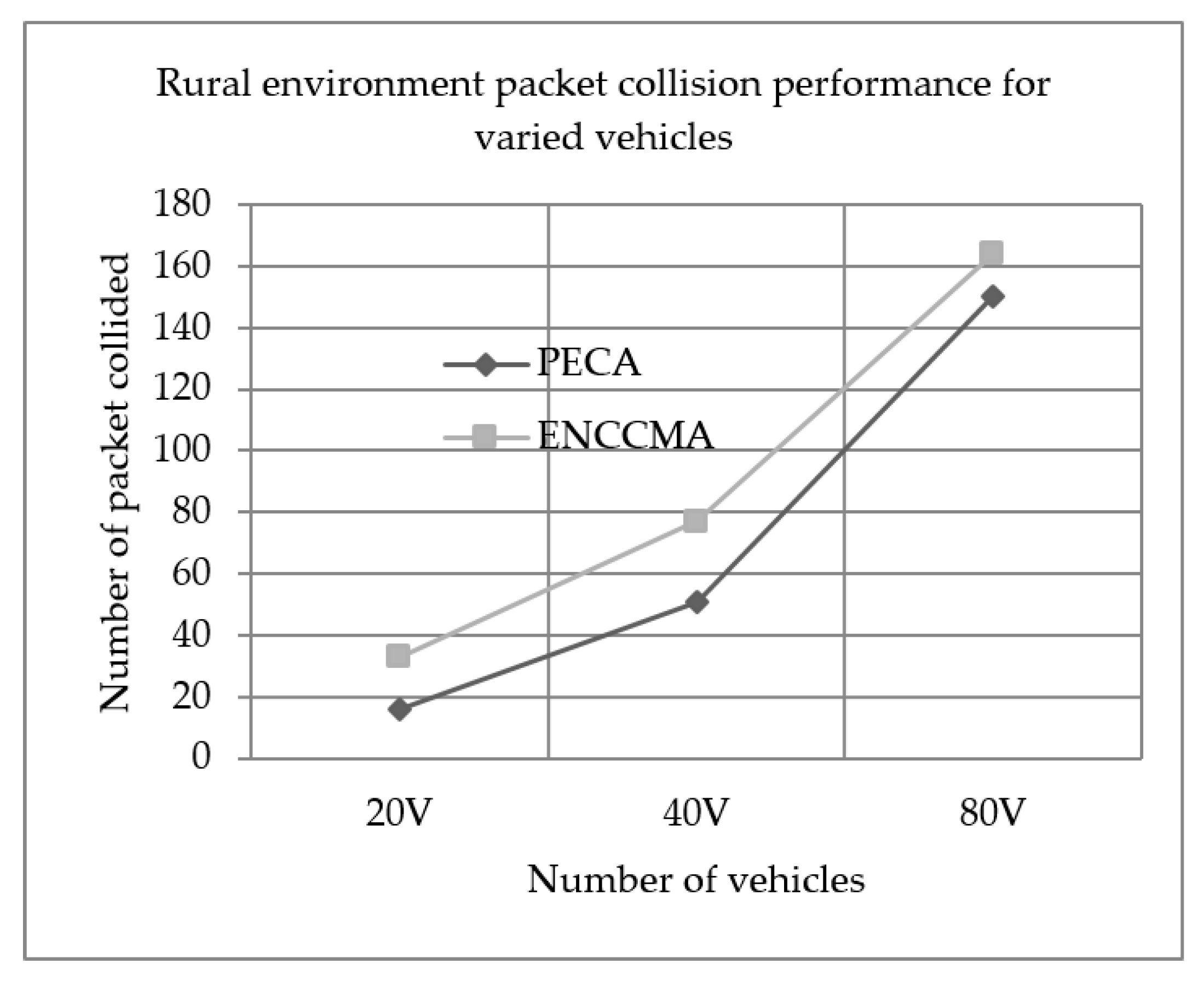
5.3. Collision Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Standard Specification for Telecommunications and Information Exchange between Roadside and Vehicle Systems—5 GHz Band Dedicated Short Range Communications (DSRC) Medium Access Control (MAC) and Physical Layer (PHY) Specifications; ASTM E2213: West Conshohocken, PA, USA, 2007.
- De Souza, A.M.; Maia, G.; Braun, T.; Villas, L.A. An Interest-Based Approach for Reducing Network Contentions in Vehicular Transportation Systems. Sensors 2019, 19, 2325. [Google Scholar] [CrossRef] [PubMed]
- ITS Project. 2017. Available online: http://www.its.dot.gov/index.html/ (accessed on 7 July 2017).
- 802.11-2012-IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless Lan Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: Piscataway, NJ, USA, 2012. [CrossRef]
- Nguyen, T.V.; Baccelli, F.; Zhu, K.; Subramanian, S.; Wu, X. A performance analysis of CSMA based broadcast protocol in VANETS. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2805–2813. [Google Scholar]
- IEEE Standard for Wireless Access in Vehicular Environments (Wave)—Networking Services Corrigendum 1: Miscellaneous Corrections; IEEE: Piscataway, NJ, USA, 2012; pp. 1–19. [CrossRef]
- Husain, K.; Awang, A.; Kamel, N.; Aïssa, S. Intersection-Based Link-Adaptive Beaconless Forwarding in Urban Vehicular Ad-Hoc Networks. Sensors 2019, 19, 1242. [Google Scholar] [CrossRef] [PubMed]
- Claudia, C.; Antonella, M.; Alexey, V. Understanding the performance of short-lived control broadcast packets in 802.11p/wave vehicular networks. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Amsterdam, The Netherlands, 14–16 November 2011; pp. 102–108. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Hassan, M.I.; Vu, H.L.; Sakurai, T. Performance analysis of the IEEE 802.11 MAC protocol for DSRC safety applications. IEEE Trans. Veh. Technol. 2011, 60, 3882–3896. [Google Scholar] [CrossRef]
- Quincy, T.; Weisheng, S.; Javid, T. Estimating contention of IEEE 802.11 broadcasts based on inter-frame idle slots. In Proceedings of the 38th IEEE Conference on Local Computer Networks Workshops (LCN Workshops), Sydney, NSW, Australia, 21–24 October 2013; pp. 120–127. [Google Scholar]
- Zhang, R.; Cheng, X.; Yang, L.; Shen, X.; Jiao, B. A novel centralized TDMA-Based scheduling protocol for vehicular networks. IEEE Trans. Intell. Transp. Syst. 2015, 16, 411–416. [Google Scholar] [CrossRef]
- Jiang, X.; Du, D.H.C. PTMAC: A Prediction-Based TDMA MAC Protocol for Reducing Packet Collisions in VANET. IEEE Trans. Veh. Technol. 2016, 65, 9209–9223. [Google Scholar] [CrossRef]
- Zouina, D.; Samira, M. A SDMA-Based mechanism for accurate and efficient neighborhood discovery link layer service. IEEE Trans. Veh. Technol. 2016, 65, 603–613. [Google Scholar]
- Manzano, M.; Espinosa, F.; Lu, N.; Shen, X.; Mark, J.W.; Liu, F. Cognitive Self-Scheduled Mechanism for Access Control in Noisy Vehicular Ad Hoc Networks. Math. Probl. Eng. 2015, 2015, 354292. [Google Scholar] [CrossRef]
- You, H.; Eylem, E.; Haris, K.; Onur, A. Throughput-Efficient Channel Allocation Algorithms in Multi-Channel Cognitive Vehicular Networks. IEEE Trans. Wirel. Commun. 2017, 16, 757–770. [Google Scholar]
- Qu, Q.; Li, B.; Yang, M.; Yan, Z. An OFDMA based concurrent multiuser MAC for upcoming IEEE 802.11ax. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 136–141. [Google Scholar]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and Perspectives of Vehicular Wi-Fi versus Sidelink Cellular-V2X in the 5G Era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J. Heterogeneous V2V Communications in Multi-Link and Multi-RAT Vehicular Networks. arXiv, 2018; arXiv:1812.02367v2. [Google Scholar]
- Huang, W.; Ding, L.; Meng, D.; Hwang, J.; Xu, Y.; Zhang, W. QOE-Based Resource Allocation for Heterogeneous Multi-Radio Communication in Software-Defined Vehicle Networks. IEEE Access 2018, 6, 3387–3399. [Google Scholar] [CrossRef]
- Kajackas, A.; Vindasius, A.; Stanaitis, S. Inter-Vehicle Communication: Emergency Message Delay Distributions. Electron. Electr. Eng. 2009, 96, 55–58. [Google Scholar]
- Arrate, A.G.; Christoph, F.M. Dependability of Decentralized Congestion Control for Varying VANET Density. IEEE Trans. Veh. Technol. 2016, 65, 9153–9167. [Google Scholar]
- Peppino, F.; Floriano, D.R.; Ceare, S. A Predictive Cross-Layered Interference Management in a Multichannel MAC with Reactive Routing in VANET. IEEE Trans. Mob. Comput. 2016, 15, 1850–1862. [Google Scholar]
- Sepulcre, M.; Gozalvez, J.; Lucas-Estañ, M.C. Power and Packet Rate Control for Vehicular Networks in Multi-Application Scenarios. IEEE Trans. Veh. Technol. 2019. [Google Scholar] [CrossRef]
- Yang, B.; Li, B.; Yan, Z.; Yang, M. A channel reservation based multi-channel MAC protocol with serial cooperation for the next Generation WLAN. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–6. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Kim, T.; Lee, H.J. An Environmental Channel Throughput and Radio Propagation Modeling for Vehicle-to-Vehicle Communication. Int. J. Distrib. Sens. Netw. 2018, 14, 1–10. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. V2V communication modeling for environmental channel throughput and radio propagation. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 18–20 October 2017; pp. 507–512. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Kang, Y.J.; Lee, H.J. Obstacles Effects on Signal Attenuation in Line of Sight for Different Environments in V2V. In Proceedings of the 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon-si Gangwon-do, Korea, 11–14 February 2018; pp. 17–20. [Google Scholar]
- Mohammed, A.A.; Ahmed, A.A.; Lee, H.J. Performance Analysis for City, Highway and Rural Area in Vehicle-to-Vehicle Network. In Proceedings of the 8th IEEE International Conference on ICTC Convergence, Jeju Island, Korea, 17–19 October 2018. [Google Scholar]

| Parameters | Value |
|---|---|
| Network | 30 km × 30 km |
| MAC | ENCCMA & PECA |
| Modulation scheme | 64-QAM |
| Mobility of Vehicles | 20 cycle per frame |
| Bandwidth | 27 Mbps |
| Frequency Channels | 7 |
| Vehicles | 40, 20, & 80 |
| Coding rate | 0.75 |
| Message size | 75 bytes |
| Time slots | 8 μs |
| Environment | Rural, City & Highway |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network. Sensors 2019, 19, 3283. https://doi.org/10.3390/s19153283
Al-Absi MA, Al-Absi AA, Lee HJ. Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network. Sensors. 2019; 19(15):3283. https://doi.org/10.3390/s19153283
Chicago/Turabian StyleAl-Absi, Mohammed Abdulhakim, Ahmed Abdulhakim Al-Absi, and Hoon Jae Lee. 2019. "Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network" Sensors 19, no. 15: 3283. https://doi.org/10.3390/s19153283
APA StyleAl-Absi, M. A., Al-Absi, A. A., & Lee, H. J. (2019). Performance Enriching Channel Allocation Algorithm for Vehicle-to-Vehicle City, Highway and Rural Network. Sensors, 19(15), 3283. https://doi.org/10.3390/s19153283