Experimental Validation of Gaussian Process-Based Air-to-Ground Communication Quality Prediction in Urban Environments


Abstract
1. Introduction
- The accuracy and consistency of the GP-based channel prediction method was verified by real experiments in an artificial indoor urban environment.
- It is shown that the GP-based method can be run in real-time for urban relay missions.
- It is shown that the GP-based method provides a reasonably good performance with much less information (e.g., no need of the 3D map of the city and communication model parameters) compared to the model-based approach.
2. Preliminaries
2.1. Scenario and Assumptions
2.2. Overview of Network Topologies
3. Communication Quality Prediction
3.1. Empirical Model-Based Approach
3.1.1. Distance-Based Model
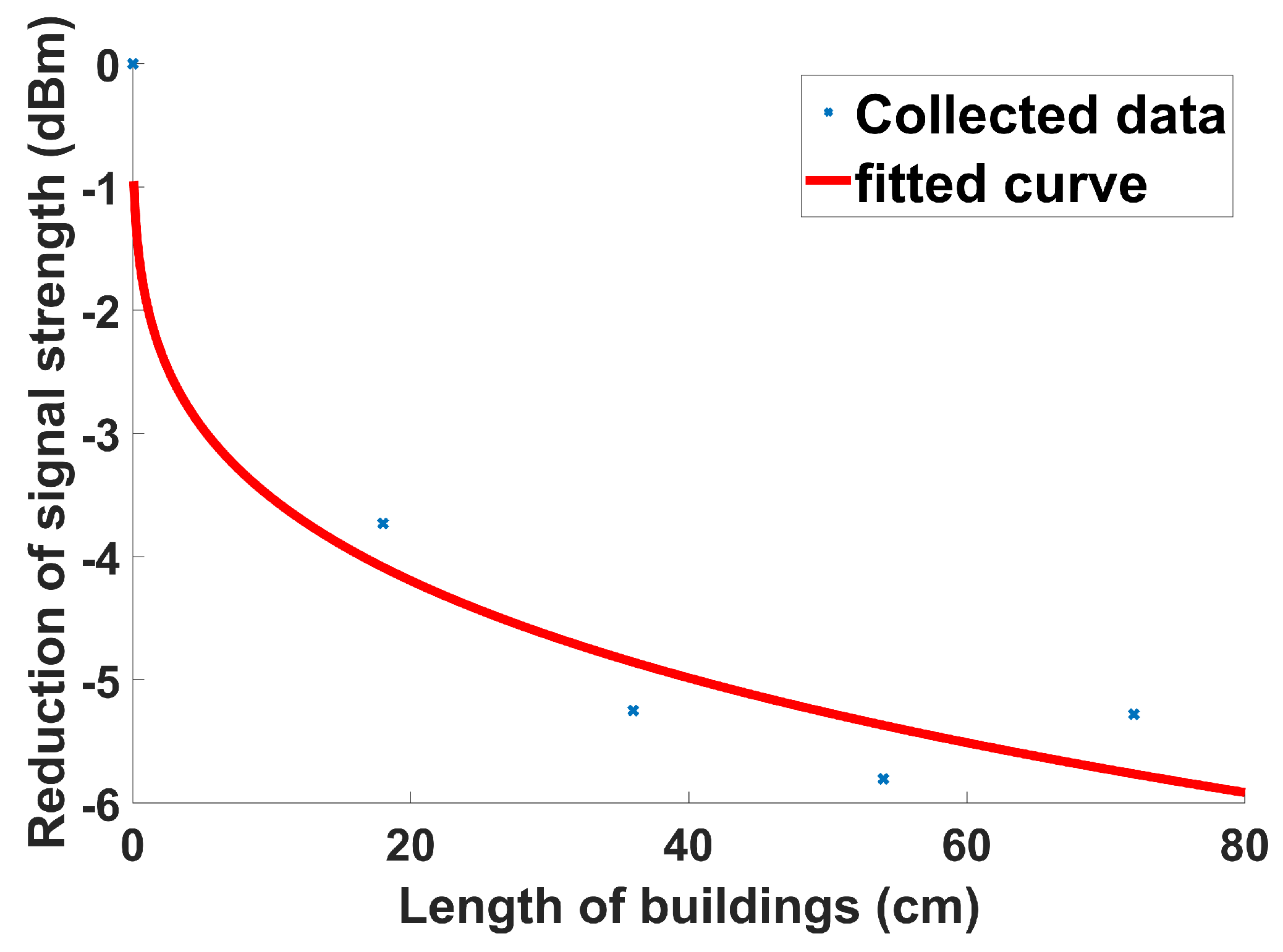
3.1.2. Effects of Buildings
3.2. Gaussian Process-Based Approach
- GP prediction requires relatively less preliminary effort. The GP-based approach autonomously computes the optimal hyperparameters of the GP model using collected measurements while the model-based approach should go through the exhausting procedure described in Section 3.1.
- GP prediction does not use a 3D map of the city. However, the model-based approach requires a map of the city to provide the building obstruction information used for Equation (3).
- The GP approach is able to deal with environmental changes by quickly re-scanning the city. On the contrary, it is hard to obtain relevant parameters in the model-based approach when some changes occur in the environment in terms of wireless communication.
4. Experimental Setup
4.1. Artificial Indoor Urban Environment
4.2. Mesh Networks Protocols
4.3. Ground Node
4.4. Aerial Relay Vehicle
5. Experimental Results
5.1. GP Computation Time
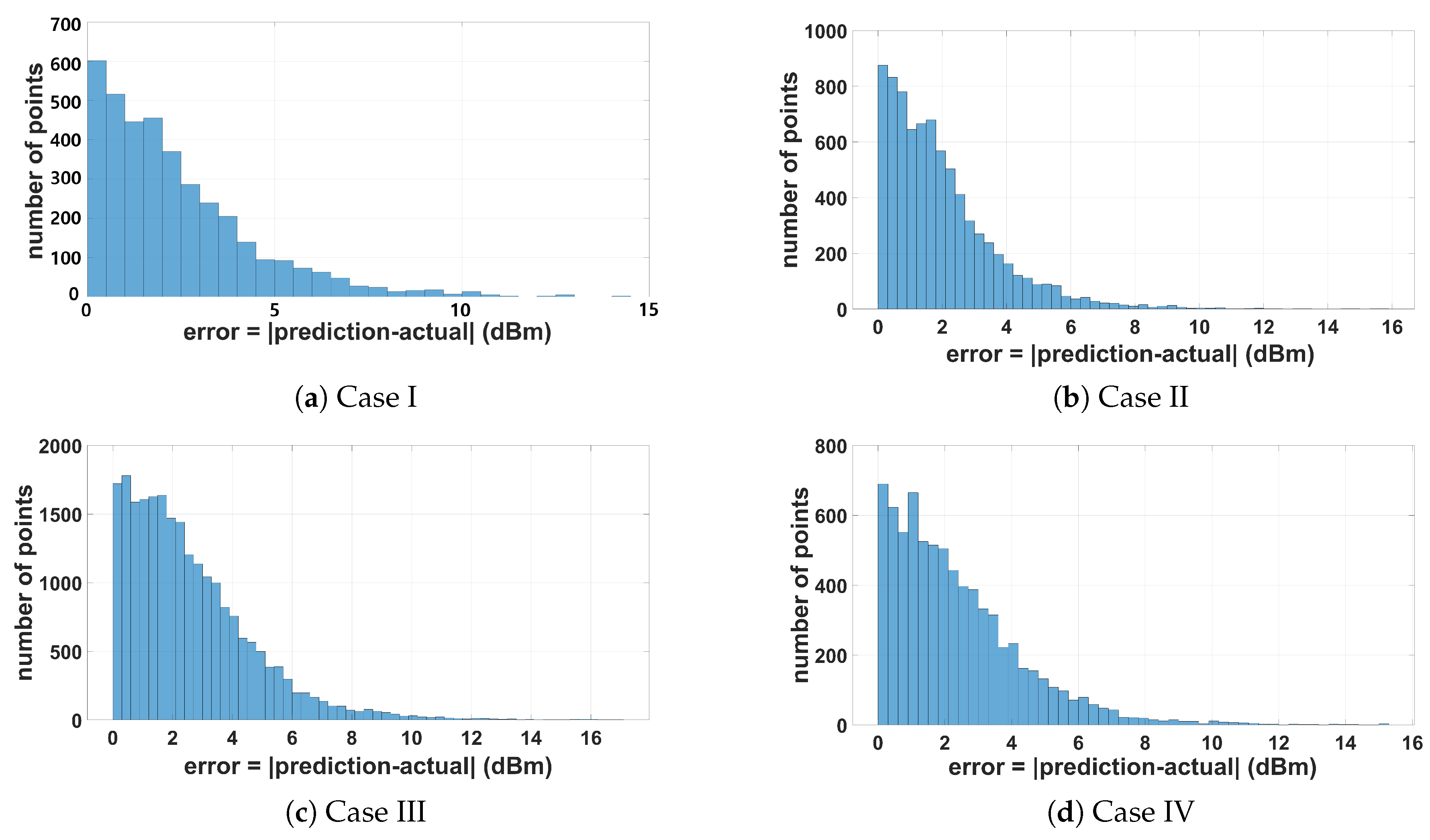
5.2. Case I: Single UGV in an Open Space
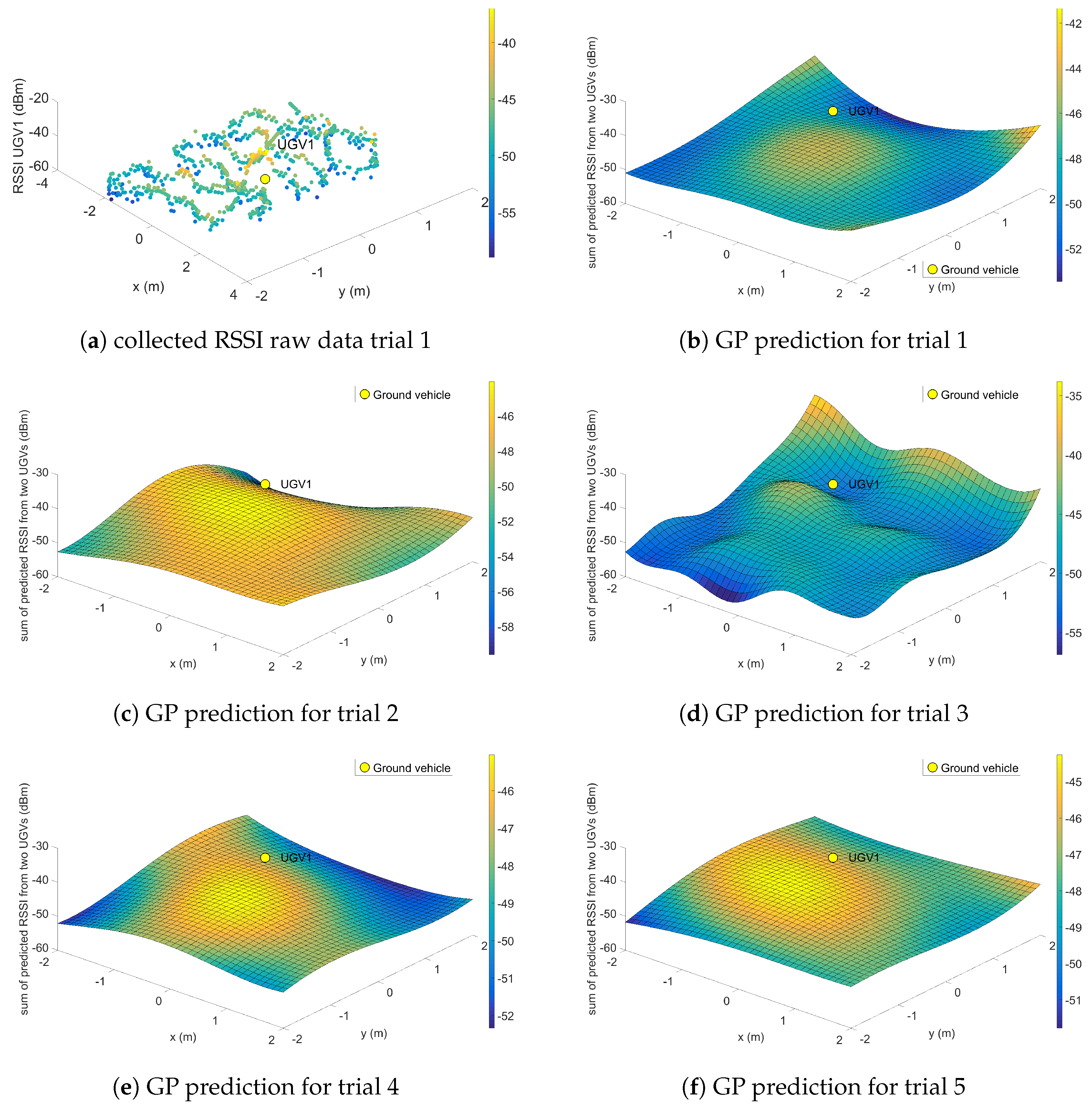
5.3. Case II: Two UGVs in an Open Space
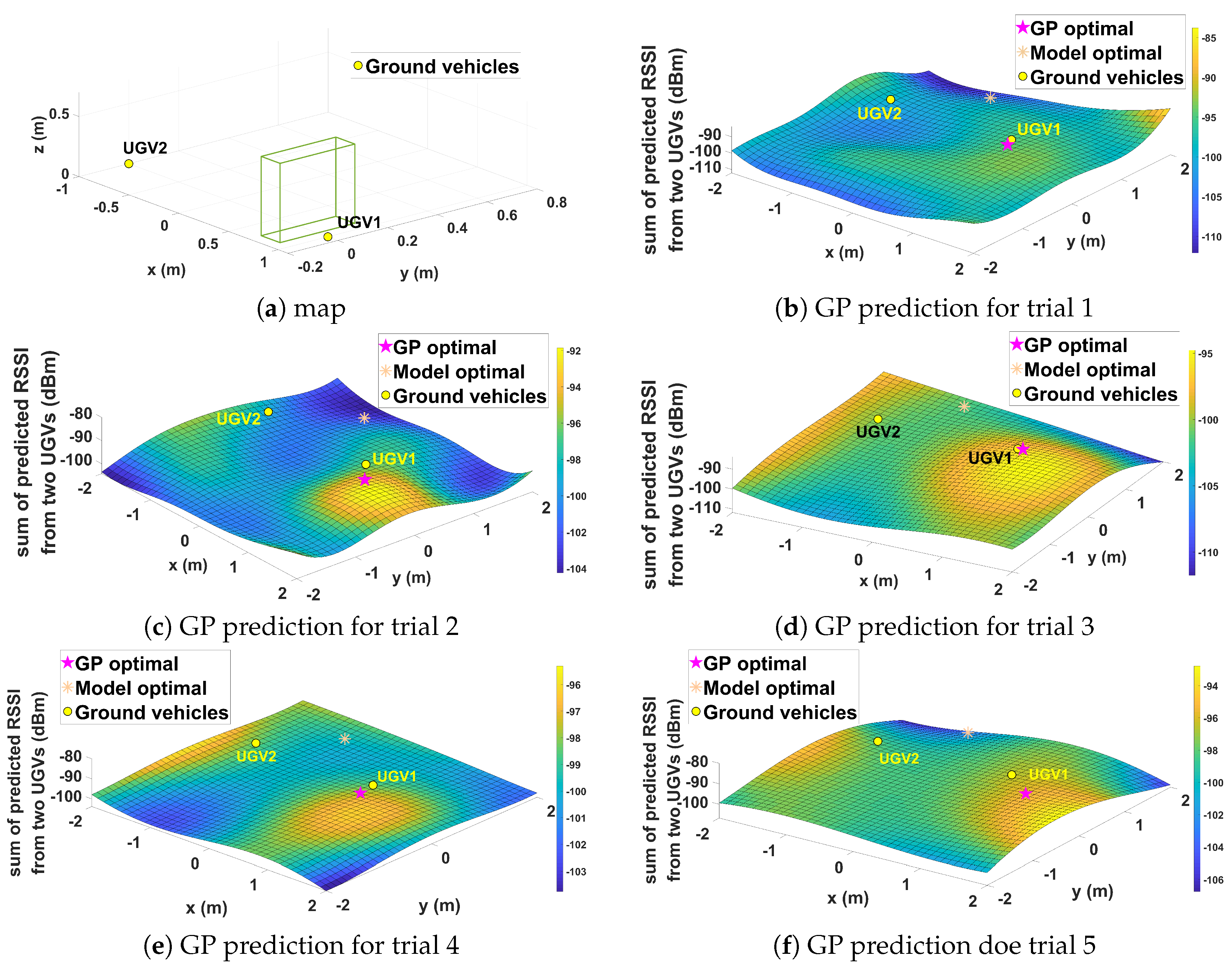
5.4. Case III: Two UGVs with One Building
5.5. Case IV: Two UGVs in Complex Cities
6. Conclusions Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Shin, H.S.; Segui Gasco, P. UAV swarms: Decision-making paradigms. In Encyclopedia of Aerospace Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; De Sousa, J.B. Performance evaluation of cooperative relay and particle swarm optimization path planning for UAV and wireless sensor network. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1403–1408. [Google Scholar]
- Kim, S.; Oh, H.; Suk, J.; Tsourdos, A. Coordinated trajectory planning for efficient communication relay using multiple UAVs. Control. Eng. Pract. 2014, 29, 42–49. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Deng, Y.; Elkashlan, M.; Nallanathan, A. Joint Blocklength and Location Optimization for URLLC-Enabled UAV Relay Systems. IEEE Commun. Lett. 2019, 23, 498–501. [Google Scholar] [CrossRef]
- Dixon, C.; Frew, E.W. Optimizing cascaded chains of unmanned aircraft acting as communication relays. IEEE J. Sel. Areas Commun. 2012, 30, 883–898. [Google Scholar] [CrossRef]
- Lee, D.J.; Andersson, K. Hybrid control of long-endurance aerial robotic vehicles for wireless sensor networks. Int. J. Adv. Robot. Syst. 2011, 8, 101–113. [Google Scholar] [CrossRef]
- Carfang, A.J.; Wagle, N.; Frew, E.W. Improving data ferrying by iteratively learning the radio frequency environment. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 1182–1188. [Google Scholar]
- Chen, J.; Yatnalli, U.; Gesbert, D. Learning radio maps for UAV-aided wireless networks: A segmented regression approach. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Watza, S.; Kanlapuli, R.; Frew, E. Hybrid RF Propagation Model using ITM and Gaussian processes for Communication-Aware Planning. In Proceedings of the Robotics: Science and Systems XIII, Cambridge, MA, USA, 12–16 July 2017. [Google Scholar]
- Fink, J.; Michael, N.; Kushleyev, A.; Kumar, V. Experimental characterization of radio signal propagation in indoor environments with application to estimation and control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 2834–2839. [Google Scholar]
- Gao, Y.; Chen, H.; Li, Y.; Lyu, C.; Liu, Y. Autonomous Wi-Fi Relay Placement With Mobile Robots. IEEE/ASME Trans. Mechatron. 2017, 22, 2532–2542. [Google Scholar] [CrossRef]
- Caccamo, S.; Parasuraman, R.; Freda, L.; Gianni, M.; Ögren, P. RCAMP: A resilient communication-aware motion planner for mobile robots with autonomous repair of wireless connectivity. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2010–2017. [Google Scholar]
- Ladosz, P.; Oh, H.; Chen, W.H. Prediction of air-to-ground communication strength for relay UAV trajectory planner in urban environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6831–6836. [Google Scholar]
- Ladosz, P.; Oh, H.; Zheng, G.; Chen, W. Gaussian Process-Based Channel Prediction for Communication Relay UAV in Urban Environments. IEEE Trans. Aerosp. Electron. Syst. 2019, in press. [Google Scholar] [CrossRef]
- Meador, B. A Survey of Computer Network Topology and Analysis Examples. 2008. Available online: https://www.cse.wustl.edu/~jain/cse567-08/ftp/topology/index.html (accessed on 30 June 2019).
- Paciorek, C.J.; Schervish, M.J. Nonstationary covariance functions for Gaussian process regression. In Advances in Neural Information Processing Systems; MIT Press: Vancouver, BC, Canada, 2004; pp. 273–280. [Google Scholar]
- Qureshi, U.M.; Shaikh, F.K.; Aziz, Z.; Shah, S.M.Z.S.; Sheikh, A.A.; Felemban, E.; Qaisar, S.B. RF path and absorption loss estimation for underwater wireless sensor networks in different water environments. Sensors 2016, 16, 890. [Google Scholar] [CrossRef] [PubMed]
- Open Mesh.net, B.A.T.M.A.N. (Better Approach to Mobile Ad-Hoc Networking). Available online: http://www.open-mesh.net/ (accessed on 28 June 2019).
- Hiertz, G.R.; Denteneer, D.; Max, S.; Taori, R.; Cardona, J.; Berlemann, L.; Walke, B. IEEE 802.11 s: The WLAN Mesh Standard. IEEE Wirel. Commun. 2010, 17, 104–111. [Google Scholar] [CrossRef]
- IEEE 802 LAN/MAN Standards Committee. IEEE Standard for Low-Rate Wireless Networks—Amendment 5: Enabling/Updating the Use of Regional Sub-GHz Bands. Available online: https://ieeexplore.ieee.org/document/7964803 (accessed on 28 June 2019).
- Voinov, I.A.; Cedeño, A.C.; Chung, J.; González, G. A Performance Analysis of Wireless Mesh Networks Implementations Based on Open Source Software. In Proceedings of the IFIP International Conference on Open Source Systems, San Jose, Costa Rica, 6–9 May 2014; pp. 107–110. [Google Scholar]
- Stambler, A. rosserial_xbee. Available online: http://wiki.ros.org/rosserial_xbee (accessed on 28 June 2019).
- Ermakov, V. mavros. Available online: http://wiki.ros.org/mavros (accessed on 28 June 2019).
- Ladosz, P.; Coombes, M.; Smith, J.; Hutchinson, M. A generic ROS based system for rapid development and testing of algorithms for autonomous ground and aerial vehicles. In Robot Operating System (ROS); Springer: Berlin, Germany, 2019; pp. 113–153. [Google Scholar]
- Rasmussen, C.E.; Nickisch, H. Gaussian processes for machine learning (GPML) toolbox. J. Mach. Learn. Res. 2010, 11, 3011–3015. [Google Scholar]
- Rasmussen, C.E.; Ghahramani, Z. Infinite mixtures of Gaussian process experts. In Advances in Neural Information Processing Systems; MIT Press: Vancouver, BC, Canada, 2002; pp. 881–888. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial | GP (dBm) | Model (dBm) |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| Mean |
| Trial | GP (dBm) | Model (dBm) |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| Mean |
| Trial | GP (dBm) | Model (dBm) |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| Mean |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ladosz, P.; Kim, J.; Oh, H.; Chen, W.-H. Experimental Validation of Gaussian Process-Based Air-to-Ground Communication Quality Prediction in Urban Environments. Sensors 2019, 19, 3221. https://doi.org/10.3390/s19143221
Ladosz P, Kim J, Oh H, Chen W-H. Experimental Validation of Gaussian Process-Based Air-to-Ground Communication Quality Prediction in Urban Environments. Sensors. 2019; 19(14):3221. https://doi.org/10.3390/s19143221
Chicago/Turabian StyleLadosz, Pawel, Jongyun Kim, Hyondong Oh, and Wen-Hua Chen. 2019. "Experimental Validation of Gaussian Process-Based Air-to-Ground Communication Quality Prediction in Urban Environments" Sensors 19, no. 14: 3221. https://doi.org/10.3390/s19143221
APA StyleLadosz, P., Kim, J., Oh, H., & Chen, W.-H. (2019). Experimental Validation of Gaussian Process-Based Air-to-Ground Communication Quality Prediction in Urban Environments. Sensors, 19(14), 3221. https://doi.org/10.3390/s19143221