Low-Complexity Time-Domain Ranging Algorithm with FMCW Sensors

Abstract
:1. Introduction
- We proposed a time-domain ranging algorithm, essentially by calculating the ratio of the beat frequency signal to its derivative, and analyzed the inherent error of the proposed estimation in the case of spectral dispersion. Results show that the ranging resolution is unrestricted by the frequency bandwidth of the modulating signal.
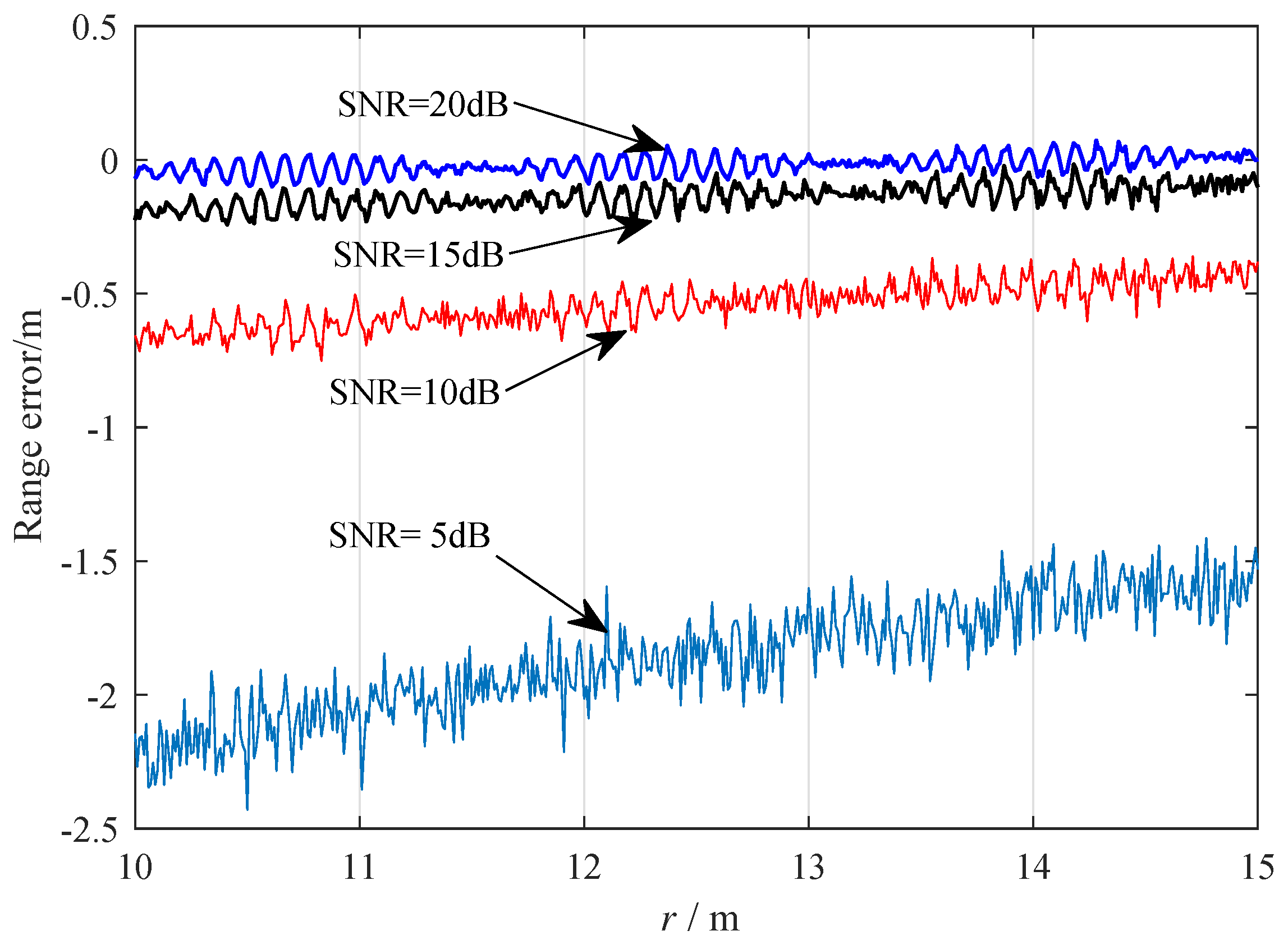
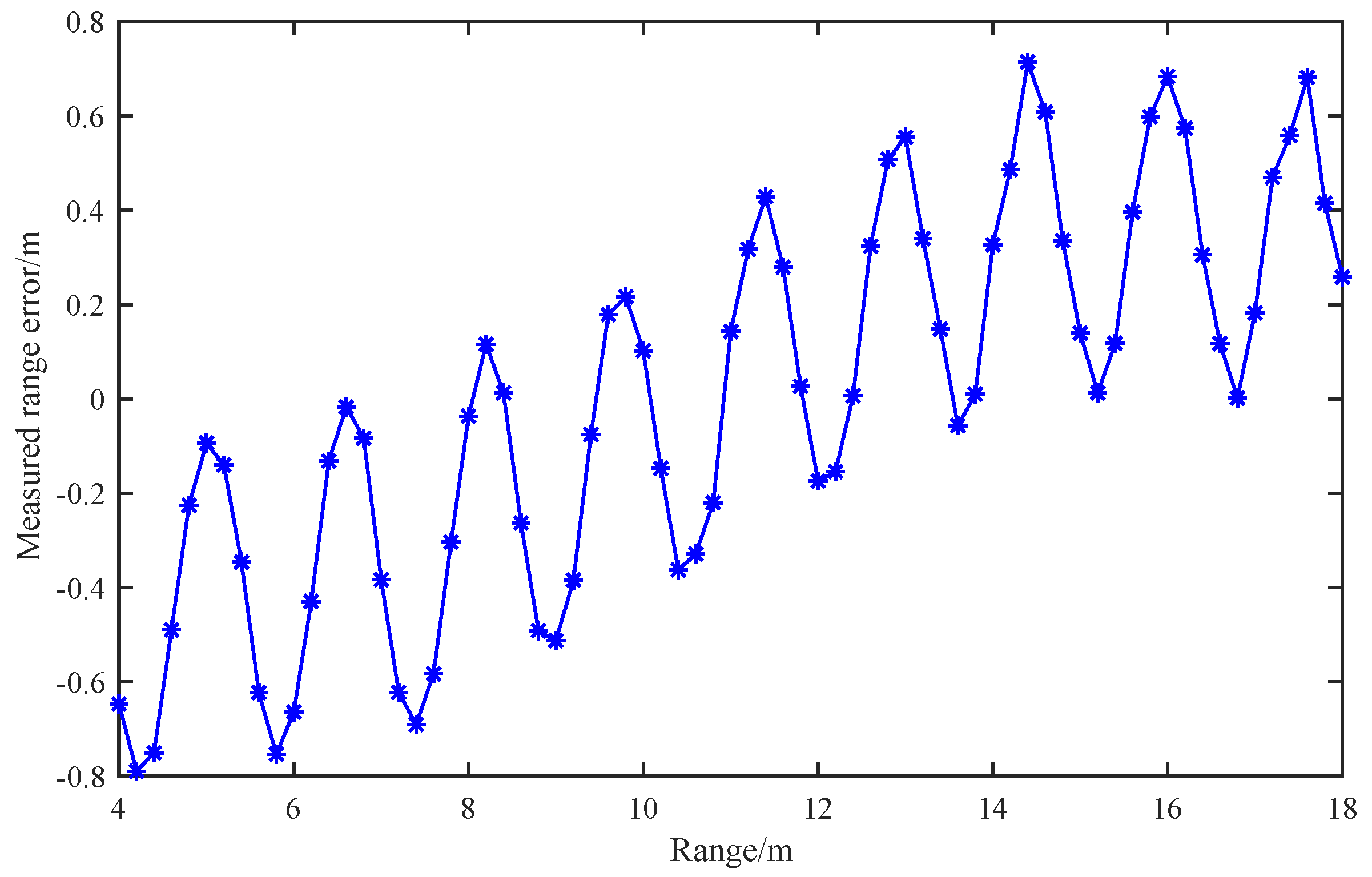
- After fabricating the FMCW sensor prototype, we conducted experiments to validate the proposed ranging scheme with ranges r = 4–18 m. Measured range errors exhibit high ranging resolution below 0.8 m and periodical characteristics for the increasing range.
- We also provided complexity analysis which indicated that the time-domain ranging algorithm has lower computational complexity without the requirement of complex multiplications, compared with conventional frequency-domain methods.
2. Time-Domain Ranging Algorithm with Beat Frequency
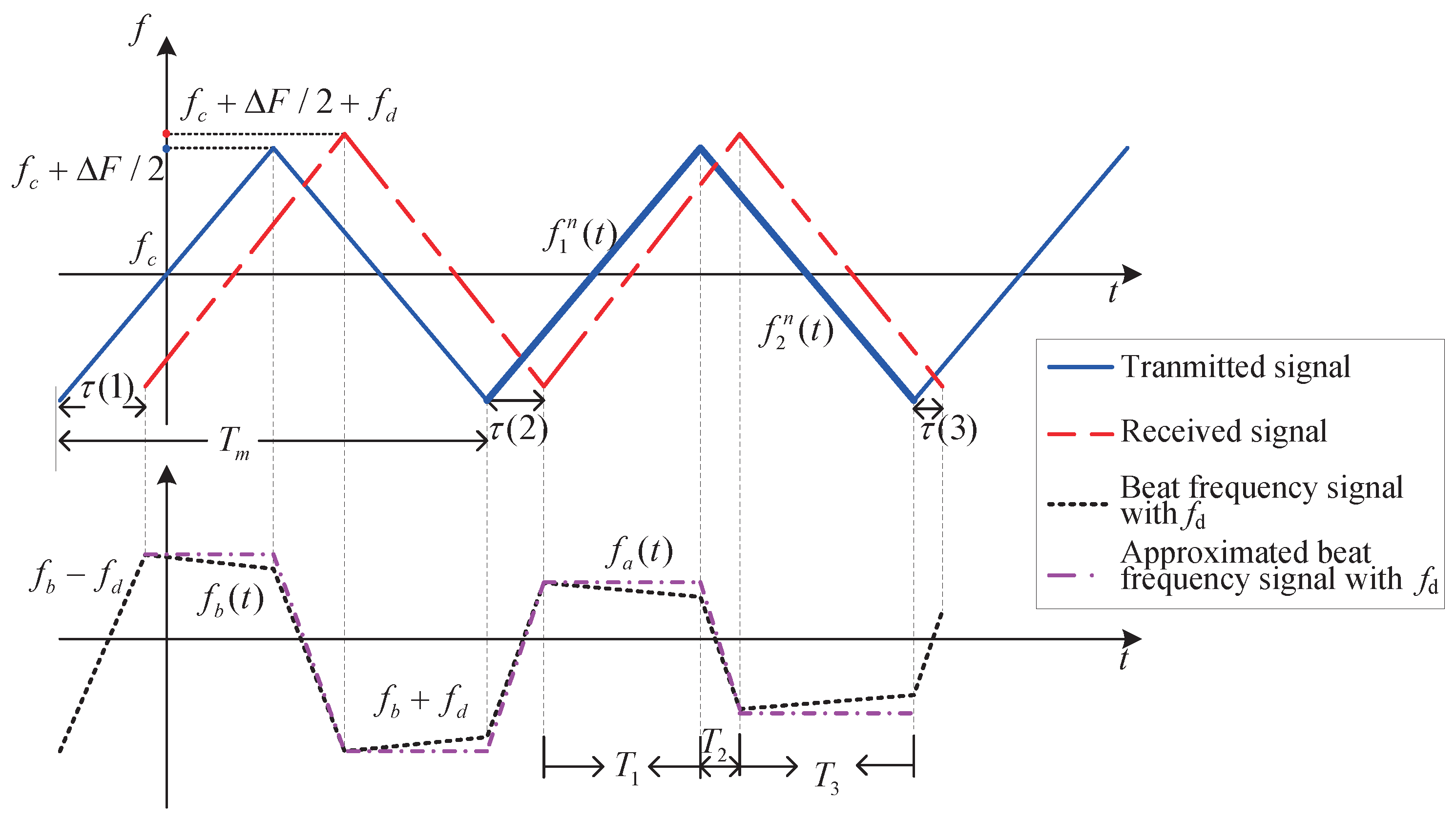
2.1. Principle of Beat Frequency Signal
2.2. Time-Domain Expressions of Beat Frequency
2.3. Proposed Time-Domain Ranging Algorithm
3. Performance of Proposed Ranging Algorithm
3.1. Analysis of Ranging Error
3.2. Ranging Error Performance
3.3. Computational Load Analysis
4. Implementation and Experiment Results
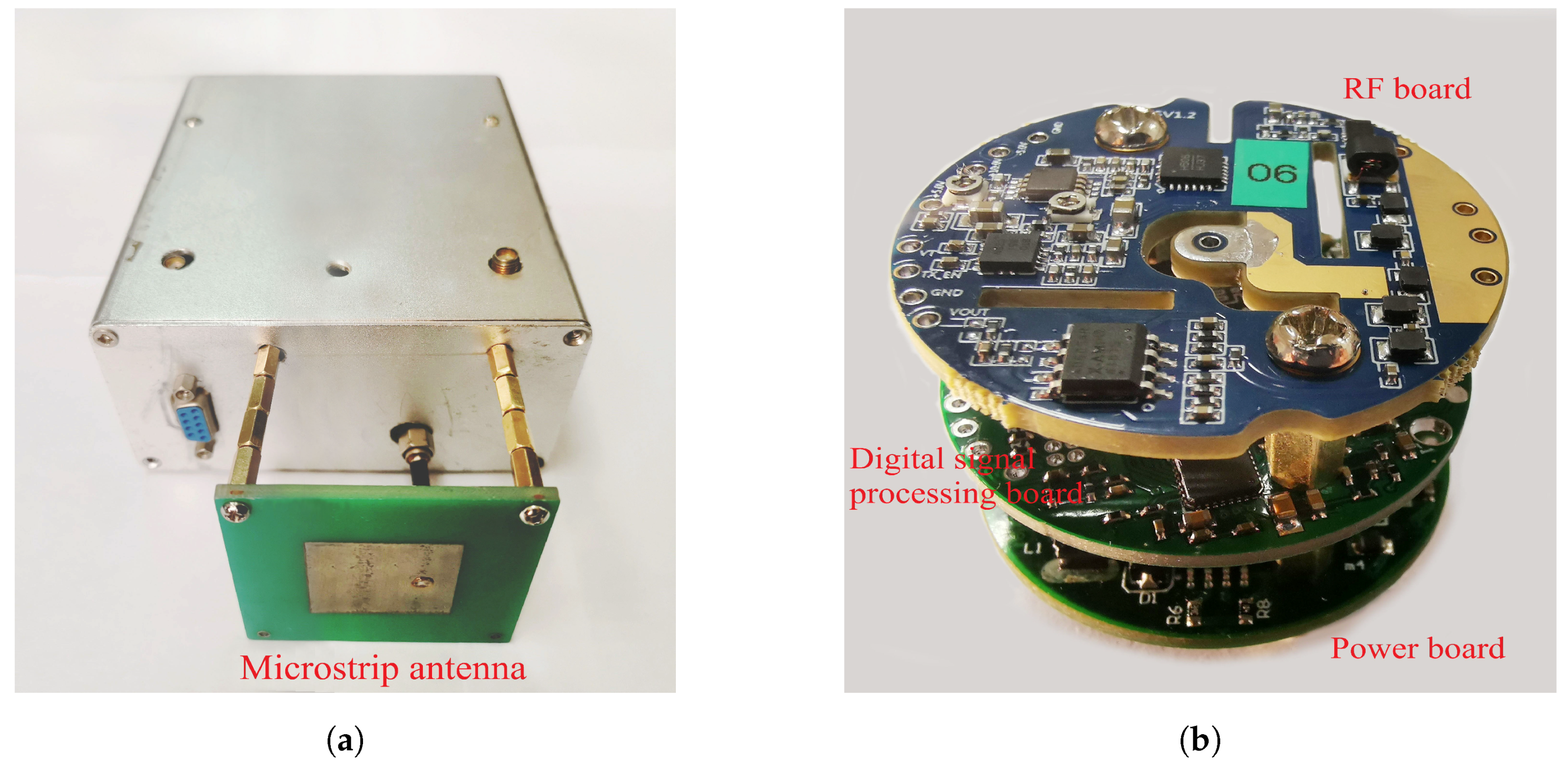
4.1. FMCW Sensor Prototype
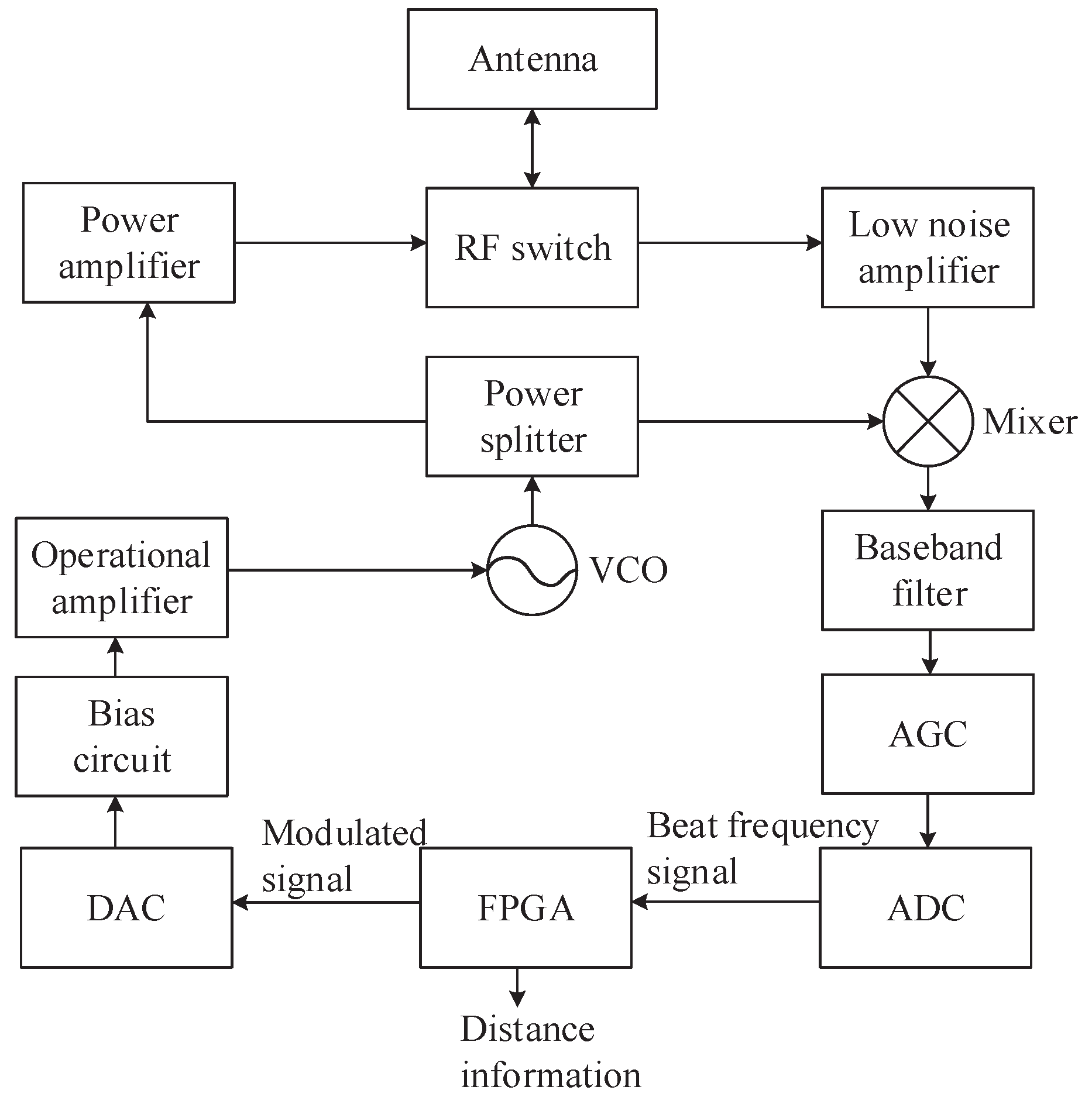
- We generate the digital modulation signal in the field-programmable gate array (FPGA) and convert it to analog signal by the digital analog converter (DAC). Then, we adjust its bias voltage and signal amplitude by the bias circuit and the operational amplifier, respectively.
- The voltage controlled oscillator (VCO) is used to generate the modulated high-frequency radar signal, which is subsequently divided into two identical signals by a power splitter. One branch of radar signal is amplified by a power amplifier and sent to the antenna for transmission through radio frequency (RF) switch, which provides high isolation between the transmission and detection of the radio signal to avoid mutual signal leakage. In the mixer, the signal received from the microstrip antenna is amplified through low noise amplifier (LNA) and then mixed by the other branch of radar signal to obtain the beat frequency signal.
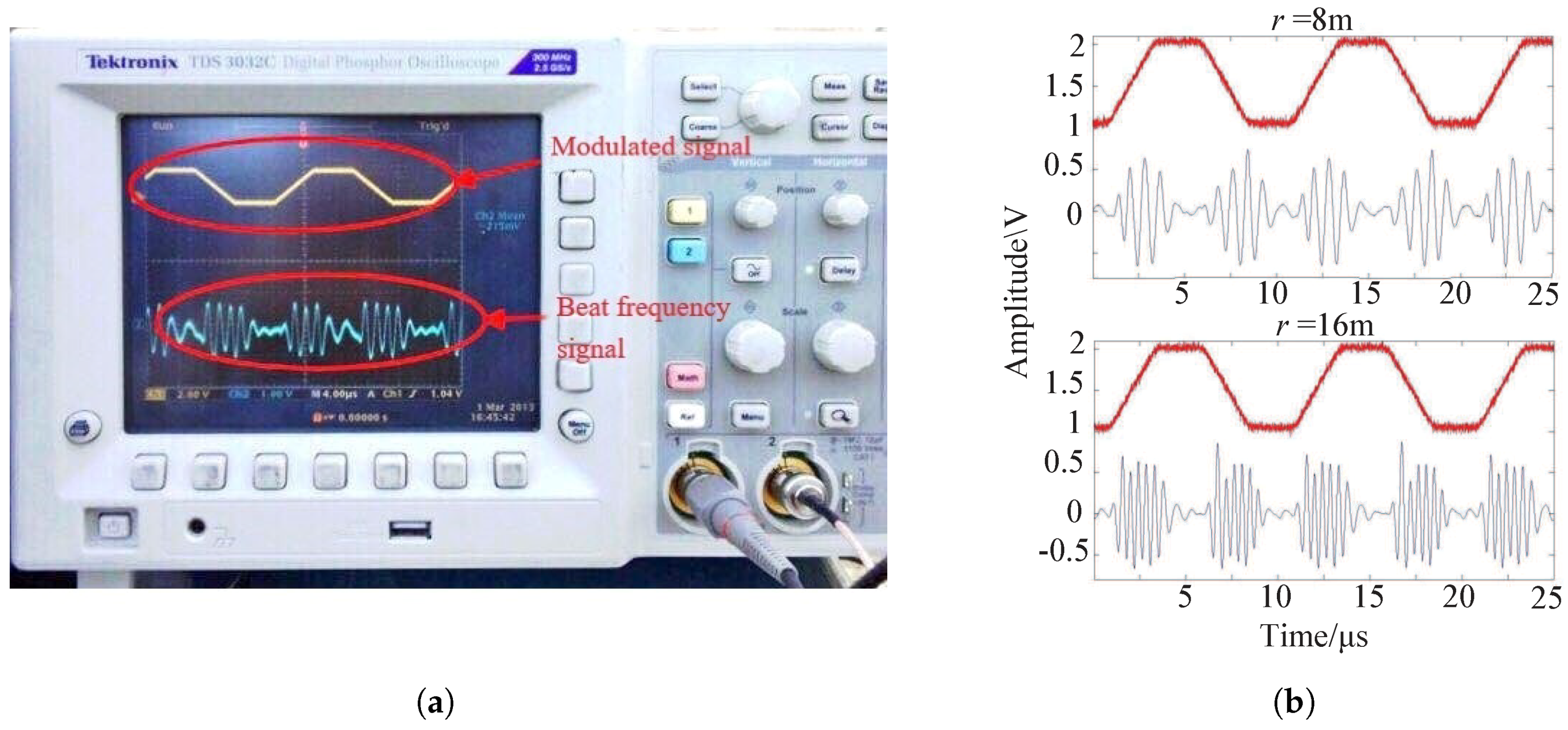
- The beat frequency signal will finally be sent to FPGA for signal processing after baseband filtering, amplification, and adjustment. The range will be calculated by the proposed ranging algorithm (16).
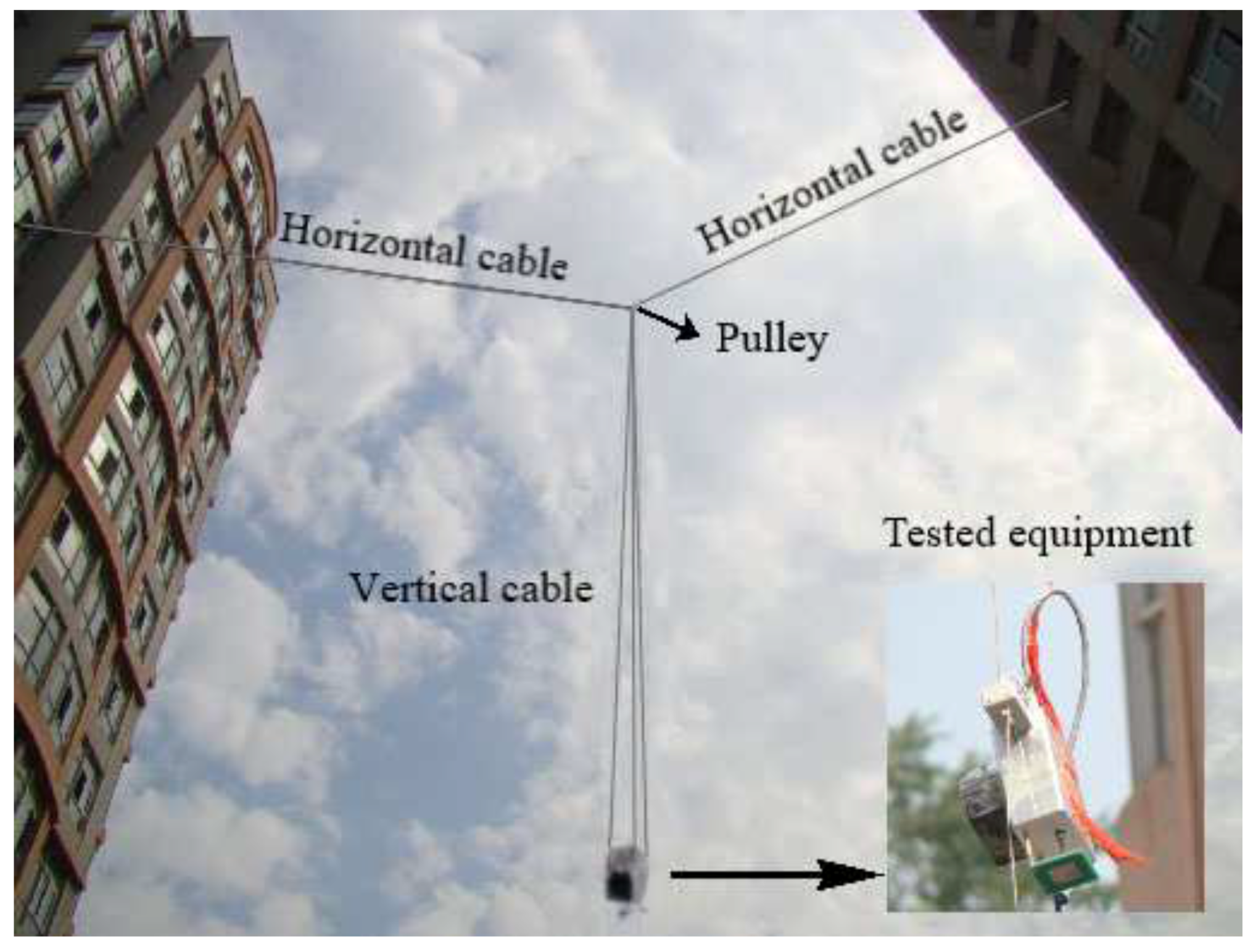
4.2. Experiment and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Chen, X.; Zhang, Z. A novel algorithm in the FMCW microwave liquid level measuring system. Meas. Sci. Technol. 2005, 17, 135–138. [Google Scholar] [CrossRef]
- Kim, B.; Kim, S.; Lee, J. A Novel DFT-Based DOA Estimation by a Virtual Array Extension Using Simple Multiplications for FMCW Radar. Sensors 2018, 18, 1560. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.H.; Jang, J.H.; Roh, J.E. Design of an FMCW Radar Altimeter for Wide-Range and Low Measurement Error. IEEE Trans. Instrum. Meas. 2015, 64, 3517–3525. [Google Scholar] [CrossRef]
- Patel, A.; Paden, J.; Leuschen, C.; Kwok, R.; Gomez-Garcia, D.; Panzer, B.; Davidson, M.W.J.; Gogineni, S. Fine-Resolution Radar Altimeter Measurements on Land and Sea Ice. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2547–2564. [Google Scholar] [CrossRef]
- Wang, J.; Xiang, W.; Lei, C.; Huangfu, J.; Ran, L. Noncontact Distance and Amplitude-Independent Vibration Measurement Based on an Extended DACM Algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 145–153. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, X.; Fei, C.; Rhee, W.; Wang, Z. A Phase-Domain ΔΣ Ranging Method for FMCW Radar Receivers. IEEE Trans. Circuits Syst. II Express Briefs 2013, 60, 537–541. [Google Scholar] [CrossRef]
- Komarov, I.; Smolskiy, S. Fundamentals of Short-Range FM Radar; Artech House: Norwood, MA, USA, 2003. [Google Scholar]
- Hyun, E.; Jin, Y.S.; Lee, J.H. A pedestrian detection scheme using a coherent phase difference method based on 2D range-doppler FMCW radar. Sensors 2016, 16, 124. [Google Scholar] [CrossRef] [PubMed]
- Saponara, S.; Neri, B. Radar Sensor Signal Acquisition and Multidimensional FFT Processing for Surveillance Applications in Transport Systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Neemat, S.; Krasnov, O.; Yarovoy, A. An Interference Mitigation Technique for FMCW Radar Using Beat-Frequencies Interpolation in the STFT Domain. IEEE Trans. Microw. Theory Tech. 2019, 67, 1207–1220. [Google Scholar] [CrossRef]
- Pan, X.; Liu, S.; Yan, S. Nonlinearity-Based Ranging Technique in SC-FDE Communication System with Oversampled Signals. IEEE Access 2019, 7, 49632–49640. [Google Scholar] [CrossRef]
- Huang, C.F.; Lu, H.P.; Chieng, W.H. Estimation of single-tone signal frequency with special reference to a frequency-modulated continuous wave system. Meas. Sci. Technol. 2012, 23, 035002. [Google Scholar] [CrossRef]
- Ko, H.H.; Cheng, K.W.; Su, H.J. Range resolution improvement for FMCW radars. In Proceedings of the European Radar Conference, Amsterdam, The Netherlands, 30–31 October 2008; pp. 352–355. [Google Scholar]
- Kim, S.; Lee, K. Low-Complexity Joint Extrapolation MUSIC Based 2D Parameter Estimator for Vital FMCW Radar. IEEE Sens. J. 2019, 19, 2205–2216. [Google Scholar] [CrossRef]
- Li, Y.C.; Choi, B.; Chong, J.W.; Oh, D. 3D Target Localization of Modified 3D MUSIC for a Triple-Channel K-Band Radar. Sensors 2018, 18, 1634. [Google Scholar] [CrossRef] [PubMed]
- Aiello, M.; Cataliotti, A.; Nuccio, S. A comparison of spectrum estimation techniques for nonstationary signals in induction motor drive measurements. IEEE Trans. Instrum. Meas. 2005, 54, 2264–2271. [Google Scholar] [CrossRef]
- Scherr, S.; Ayhan, S.; Fischbach, B.; Bhutani, A.; Zwick, T. An Efficient Frequency and Phase Estimation Algorithm With CRB Performance for FMCW Radar Applications. IEEE Trans. Instrum. Meas. 2015, 64, 1868–1875. [Google Scholar] [CrossRef]
- Kim, B.S.; Jin, Y.; Kim, S.; Lee, J. A Low-Complexity FMCW Surveillance Radar Algorithm Using Two Random Beat Signals. Sensors 2019, 19, 608. [Google Scholar] [CrossRef]
- Wang, F.; Pan, X.; Xiang, C.; Chen, M. Time-domain algorithm for FMCW based short distance ranging system. In Proceedings of the European Conference on Antennas & Propagation, Lisbon, Portugal, 12–17 April 2015. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ranging Schemes | Additions/Subtractions | Multiplications | Divisions |
|---|---|---|---|
| FFT estimation | 0 | ||
| Proposed algorithm | 0 | 1 |
| Item | Value | Item | Value |
|---|---|---|---|
| Carrier frequency | 8.2 GHz | Frequency bandwidth | 50 MHz |
| Modulation waveform | trapezoidal | Tx-Rx Switching Frequency | 4 MHz |
| Modulation frequency | 100 kHz | Sample rate | 10 MHz |
| Antenna beamwidth | 100 | Antenna gain | 6 dBi |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, X.; Xiang, C.; Liu, S.; Yan, S. Low-Complexity Time-Domain Ranging Algorithm with FMCW Sensors. Sensors 2019, 19, 3176. https://doi.org/10.3390/s19143176
Pan X, Xiang C, Liu S, Yan S. Low-Complexity Time-Domain Ranging Algorithm with FMCW Sensors. Sensors. 2019; 19(14):3176. https://doi.org/10.3390/s19143176
Chicago/Turabian StylePan, Xi, Chengyong Xiang, Shouliang Liu, and Shuo Yan. 2019. "Low-Complexity Time-Domain Ranging Algorithm with FMCW Sensors" Sensors 19, no. 14: 3176. https://doi.org/10.3390/s19143176
APA StylePan, X., Xiang, C., Liu, S., & Yan, S. (2019). Low-Complexity Time-Domain Ranging Algorithm with FMCW Sensors. Sensors, 19(14), 3176. https://doi.org/10.3390/s19143176