Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
2. Related Work
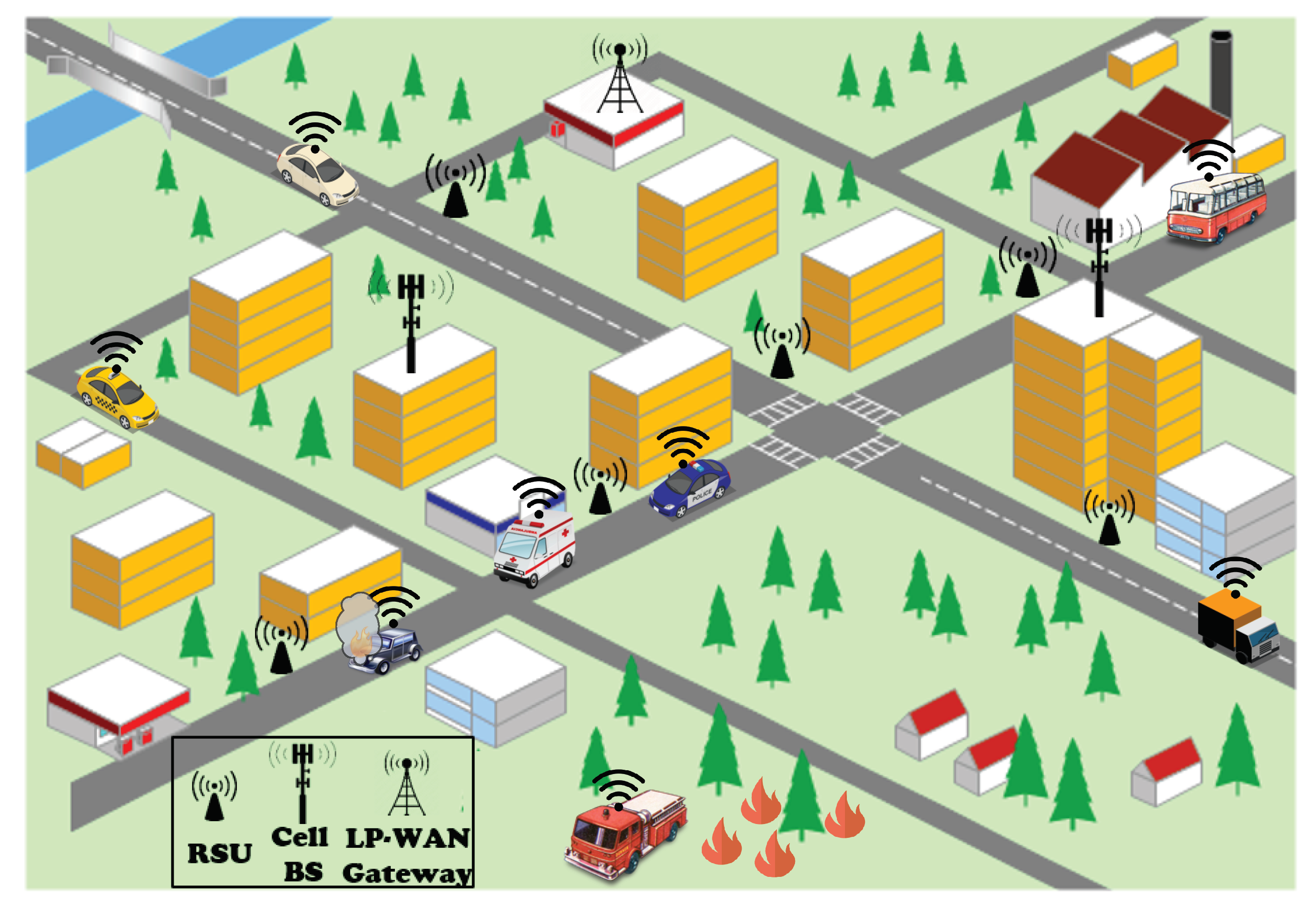
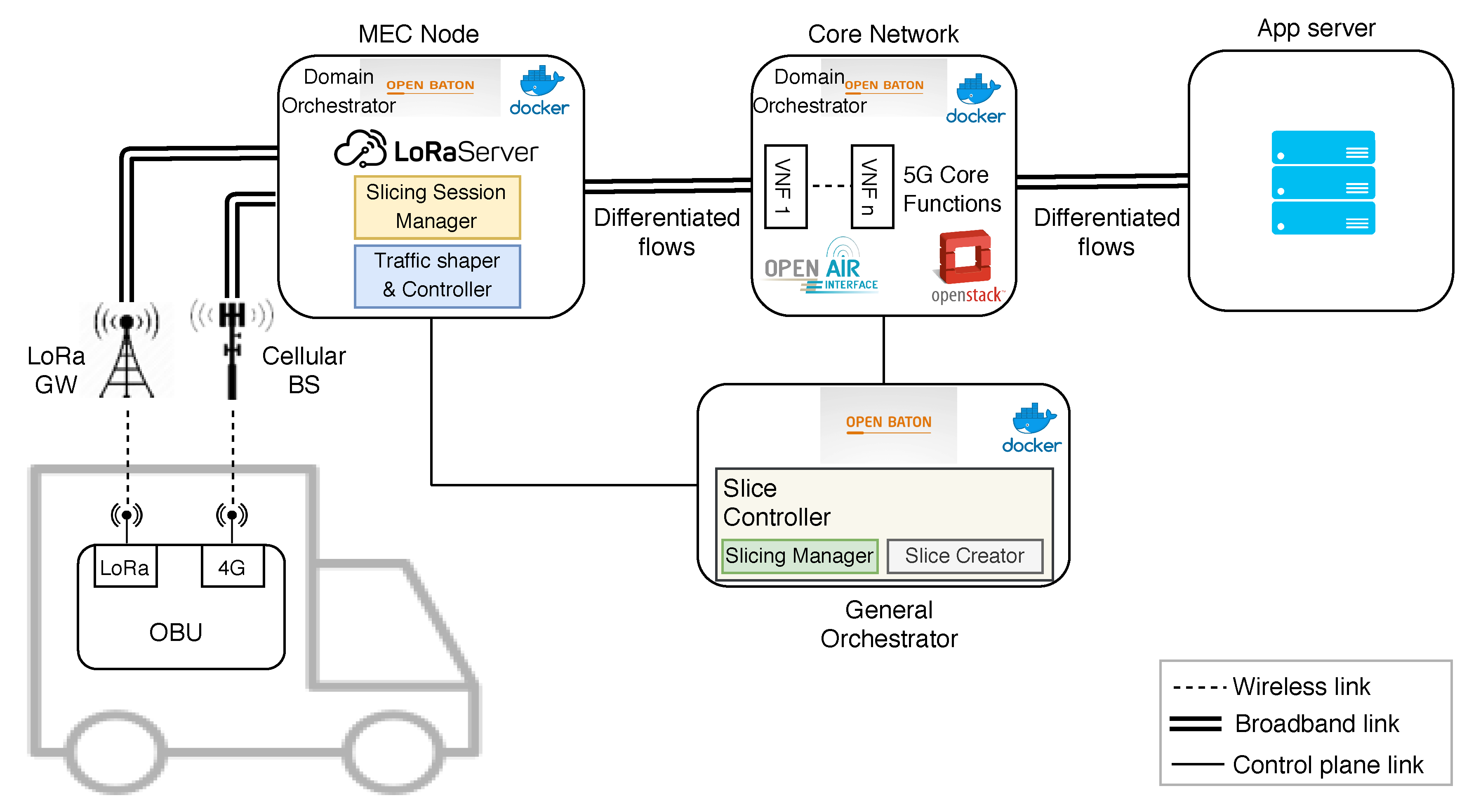
3. General Architecture
4. Structure and Working Flow of the Solution
4.1. Orchestration
4.2. Radio Access Network
4.3. MEC-Node
4.4. Core Network
4.5. App-Server
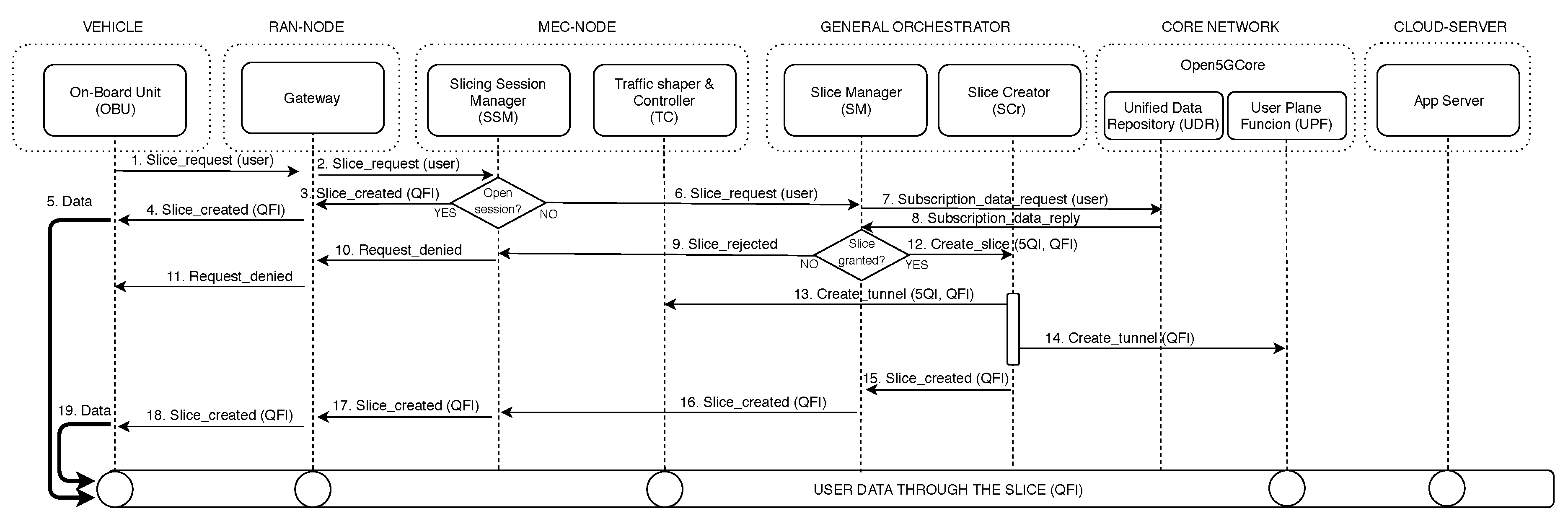
4.6. Working Flow
5. Validation and Evaluation
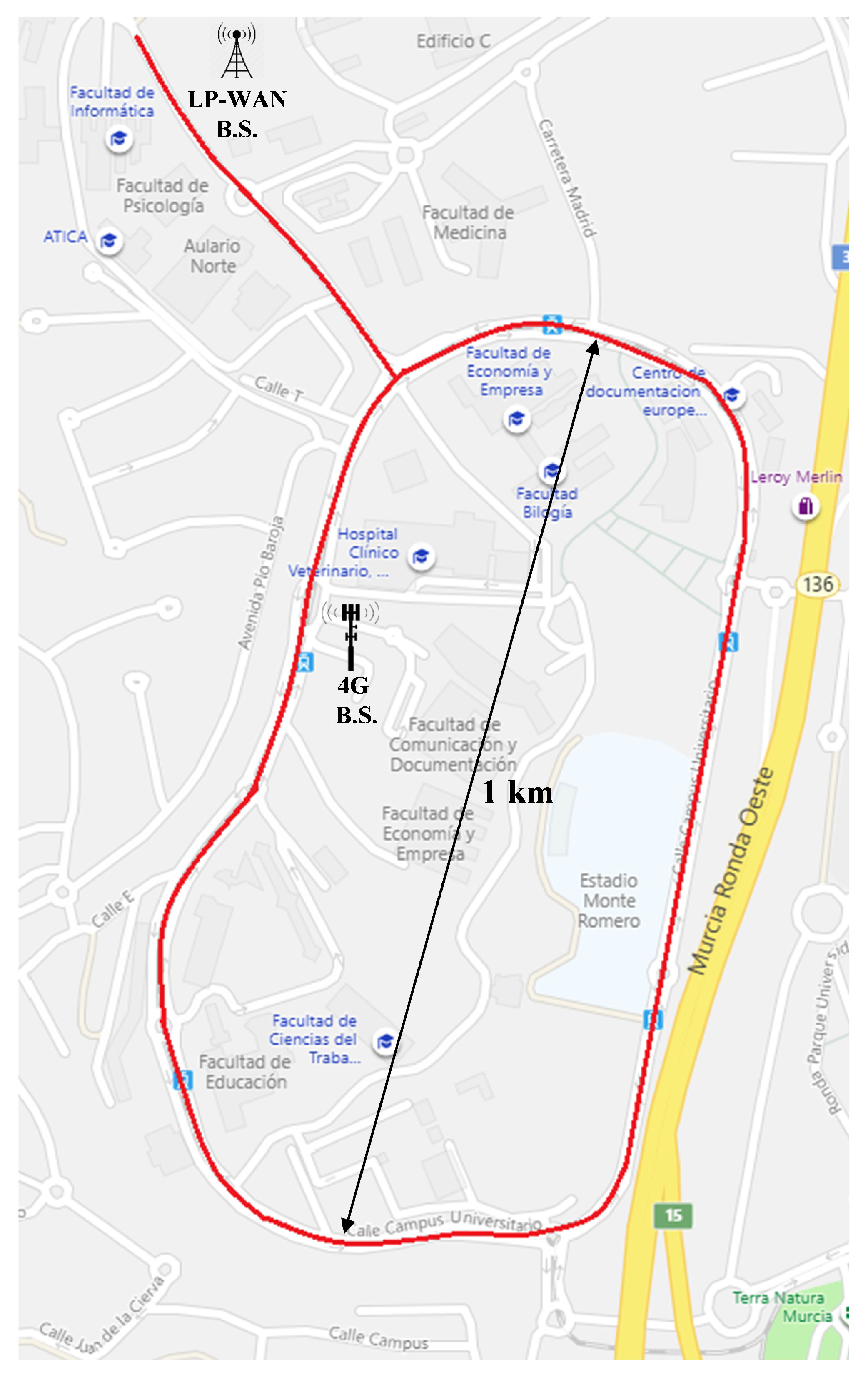
5.1. Implementation and Test Description
5.2. Validation of the Solution
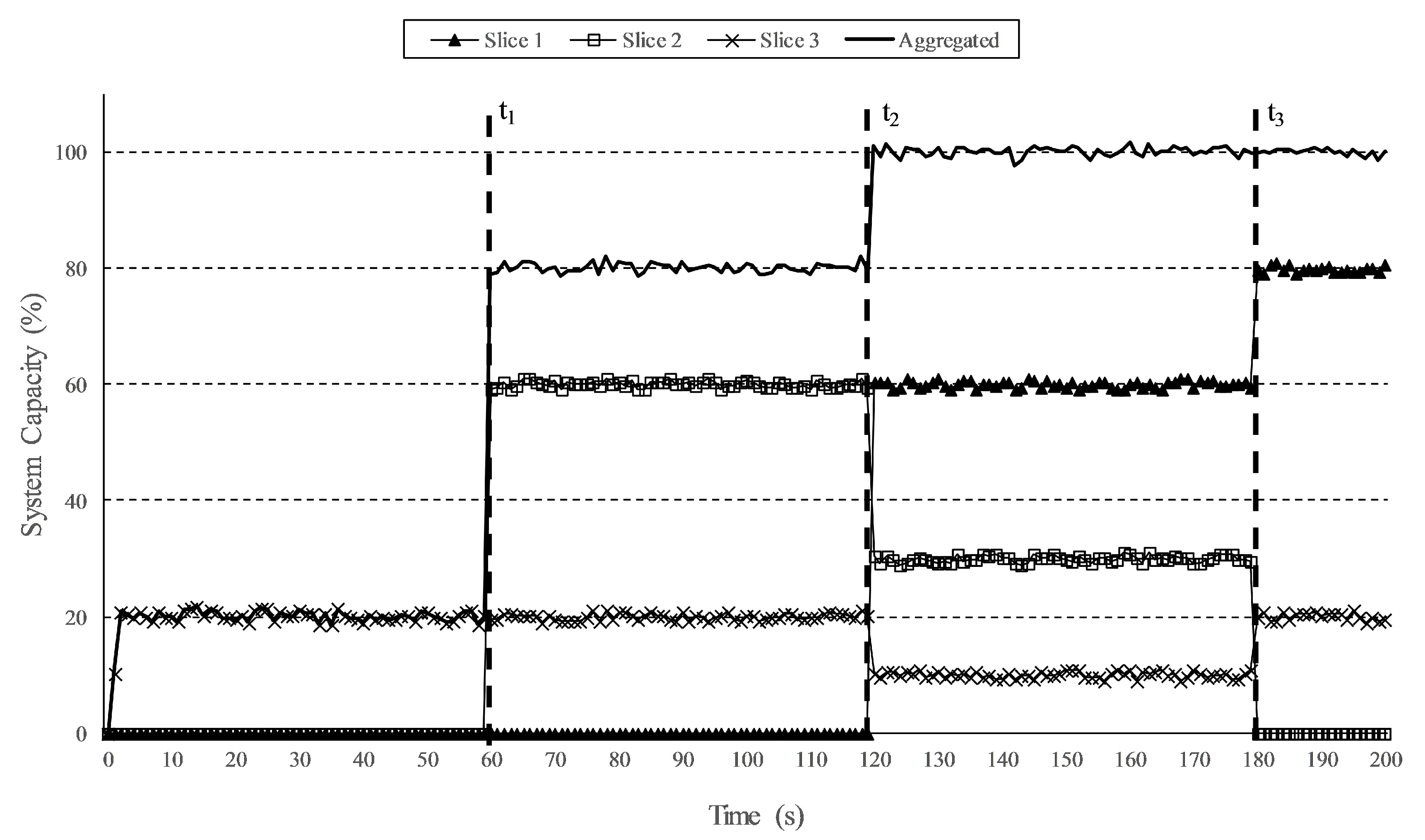
5.3. Performance Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 4G | Fourth Generation (mobile/cellular networks) |
| 5G | Fifth Generation (mobile/cellular networks) |
| CN | Core Network |
| DiffServ | Differentiated Services |
| DO | Domain Orchestrator |
| DSC | Dedicated Short-Range Communication |
| DSCP | Differentiated Services Code Point |
| eMBB | evolved Mobile Broadband |
| GO | General Orchestrator |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| ITS | Intelligent Transportation Systems |
| LP-WAN | Low Power—Wide Area Network |
| MANO | Management and Orchestration |
| MEC | Multi-Access Edge Computing |
| mMTC | massive Machine-Type Communication |
| NFV | Network Function Virtualization |
| OBU | On-Board Unit |
| OvS | Open vSwitch |
| PHB | Per Hop Behavior |
| QFI | QoS Flow ID |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RAT | Radio Access Technology |
| RTT | Round Trip Time |
| SDF | Service Data Flow |
| SDN | Software Defined Network |
| SD-WAN | Software Defined—Wide Area Network |
| SCr | Slice Creator |
| SINR | Signal to Interference & Noise Ratio |
| SM | Slicing Manager |
| SSM | Slice Session Manager |
| TC | Traffic shaper and Controller |
| UDP | User Datagram Protocol |
| UDR | Unified Data Repository |
| URLLC | Ultra-Reliable, Low-Latency Communication |
| VIM | Virtualized Infrastructure Manager |
| VNF | Virtualized Network Function |
References
- Katsaros, K.; Dianati, M. A conceptual 5G vehicular networking architecture. In 5G Mobile Communications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 595–623. [Google Scholar]
- Popovski, P.; Trillingsgaard, K.F.; Simeone, O.; Durisi, G. 5G Wireless Network Slicing for eMBB, URLLC, and mMTC: A Communication-Theoretic View. IEEE Access 2018, 6, 55765–55779. [Google Scholar] [CrossRef]
- Ojanperä, T.; Mäkelä, J.; Mämmelä, O.; Majanen, M.; Martikainen, O. Use Cases and Communications Architecture for 5G-Enabled Road Safety Services. In Proceedings of the 2018 European Conference on Networks and Communications (EuCNC), Ljubljana, Slovenia, 18–21 June 2018; pp. 335–340. [Google Scholar]
- Kaiwartya, O.; Abdullah, A.H.; Cao, Y.; Altameem, A.; Prasad, M.; Lin, C.T.; Liu, X. Internet of Vehicles: Motivation, Layered Architecture, Network Model, Challenges, and Future Aspects. IEEE Access 2016, 4, 5356–5373. [Google Scholar] [CrossRef]
- ETSI. Technical Specification 24 502 V15.4.0, Access to the 3GPP 5G Core Network (5GCN) via Non-3GPP Access Networks (N3AN); Technical Report; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- Kaloxylos, A. A Survey and an Analysis of Network Slicing in 5G Networks. IEEE Commun. Stand. Mag. 2018, 2, 60–65. [Google Scholar] [CrossRef]
- OpenAirInterface. 2019. Available online: https://www.openairinterface.org/ (accessed on 27 June 2019).
- Dinh, N.T.; Kim, Y. Information-centric dissemination protocol for safety information in vehicular ad-hoc networks. Wirel. Netw. 2017, 23, 1359–1371. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Iera, A.; Menichella, F. 5G Network Slicing for Vehicle-to-Everything Services. IEEE Wirel. Commun. 2017, 24, 38–45. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Iera, A.; Fontes, R.R.; Rothenberg, C.E. Towards 5G Network Slicing for the V2X Ecosystem. In Proceedings of the 4th IEEE Conference on Network Softwarization and Workshops (NetSoft), Montreal, QC, Canada, 25–29 June 2018; pp. 400–405. [Google Scholar] [CrossRef]
- Campolo, C.; Dos Reis Fontes, R.; Molinaro, A.; Esteve Rothenberg, C.; Iera, A. Slicing on the Road: Enabling the Automotive Vertical through 5G Network Softwarization. Sensors 2018, 18, 4435. [Google Scholar] [CrossRef] [PubMed]
- Ge, X. Ultra-Reliable Low-Latency Communications in Autonomous Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 5005–5016. [Google Scholar] [CrossRef]
- Bahlke, F.; Ramos-Cantor, O.D.; Henneberger, S.; Pesavento, M. Optimized Cell Planning for Network Slicing in Heterogeneous Wireless Communication Networks. IEEE Commun. Lett. 2018, 22, 1676–1679. [Google Scholar] [CrossRef]
- Hucheng, W.; Shanzhi, C.; Ming, A.; Yan, S. Mobility driven network slicing: An enabler of on demand mobility management for 5G. J. China Univ. Posts Telecommun. 2017, 24, 16–26. [Google Scholar] [CrossRef]
- Gu, R.; Zhang, S.; Ji, Y.; Yan, Z. Network slicing and efficient ONU migration for reliable communications in converged vehicular and fixed access network. Veh. Commun. 2018, 11, 57–67. [Google Scholar] [CrossRef]
- Li, X.; Rao, J.; Zhang, H.; Callard, A. Network Slicing with Elastic SFC. In Proceedings of the IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Xiong, K.; Leng, S.; Hu, J.; Chen, X.; Yang, K. Smart Network Slicing for Vehicular Fog-RANs. IEEE Trans. Veh. Technol. 2019, 68, 3075–3085. [Google Scholar] [CrossRef]
- Khan, H.; Luoto, P.; Bennis, M.; Latva-aho, M. On the Application of Network Slicing for 5G-V2X. In Proceedings of the 24th European Wireless Conference, Catania, Italy, 2–4 May 2018; pp. 203–208. [Google Scholar] [CrossRef]
- Ye, Q.; Li, J.; Qu, K.; Zhuang, W.; Shen, X.S.; Li, X. End-to-End Quality of Service in 5G Networks: Examining the Effectiveness of a Network Slicing Framework. IEEE Veh. Technol. Mag. 2018, 13, 65–74. [Google Scholar] [CrossRef]
- ETSI. Technical Specification 123 501 V15.4.0, System Architecture for the 5G System; Technical Rport; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- OpenBaton. 2019. Available online: https://openbaton.github.io/ (accessed on 23 June 2019).
- Cisco. White Paper: SD-WAN on Cisco IOS XE Routers: An End-to-End View; Technical Rport; Cisco: San Jose, CA, USA, 2019. [Google Scholar]
- Santa, J.; Sanchez-Iborra, R.; Rodriguez-Rey, P.; Bernal-Escobedo, L.; Skarmeta, A.F. LPWAN-Based Vehicular Monitoring Platform with a Generic IP Network Interface. Sensors 2019, 19, 264. [Google Scholar] [CrossRef] [PubMed]
- Katsalis, K.; Nikaein, N.; Huang, A. JOX: An event-driven orchestrator for 5G network slicing. In Proceedings of the 2018 IEEE/IFIP Network Operations and Management Symposium (NOMS 2018), Taipei, Taiwan, 23–27 April 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Isolani, P.H.; Cardona, N.; Donato, C.; Marquez-Barja, J.; Zambenedetti-Granvilley, L.; Latré, S. SDN-based Slice Orchestration and MAC Management for QoS delivery in IEEE 802.11 Networks. In Proceedings of the IEEE Conference on Network Function Virtualization and Software Defined Networks, Dallas, TX, USA, 12–14 November 2019. accepted. [Google Scholar]
- Garcia-Aviles, G.; Gramaglia, M.; Serrano, P.; Banchs, A. POSENS: A Practical Open Source Solution for End-to-End Network Slicing. IEEE Wirel. Commun. 2018, 25, 30–37. [Google Scholar] [CrossRef]
- Trivisonno, R.; Condoluci, M.; An, X.; Mahmoodi, T. mIoT Slice for 5G Systems: Design and Performance Evaluation. Sensors 2018, 18, 635. [Google Scholar] [CrossRef]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Santa, J.; Fernández, P.J.; Ortiz, J.; Sanchez-Iborra, R.; Skarmeta, A.F. SURROGATES: Virtual OBUs to Foster 5G Vehicular Services. Electronics 2019, 8, 117. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Guaranteed | Ceil |
|---|---|---|
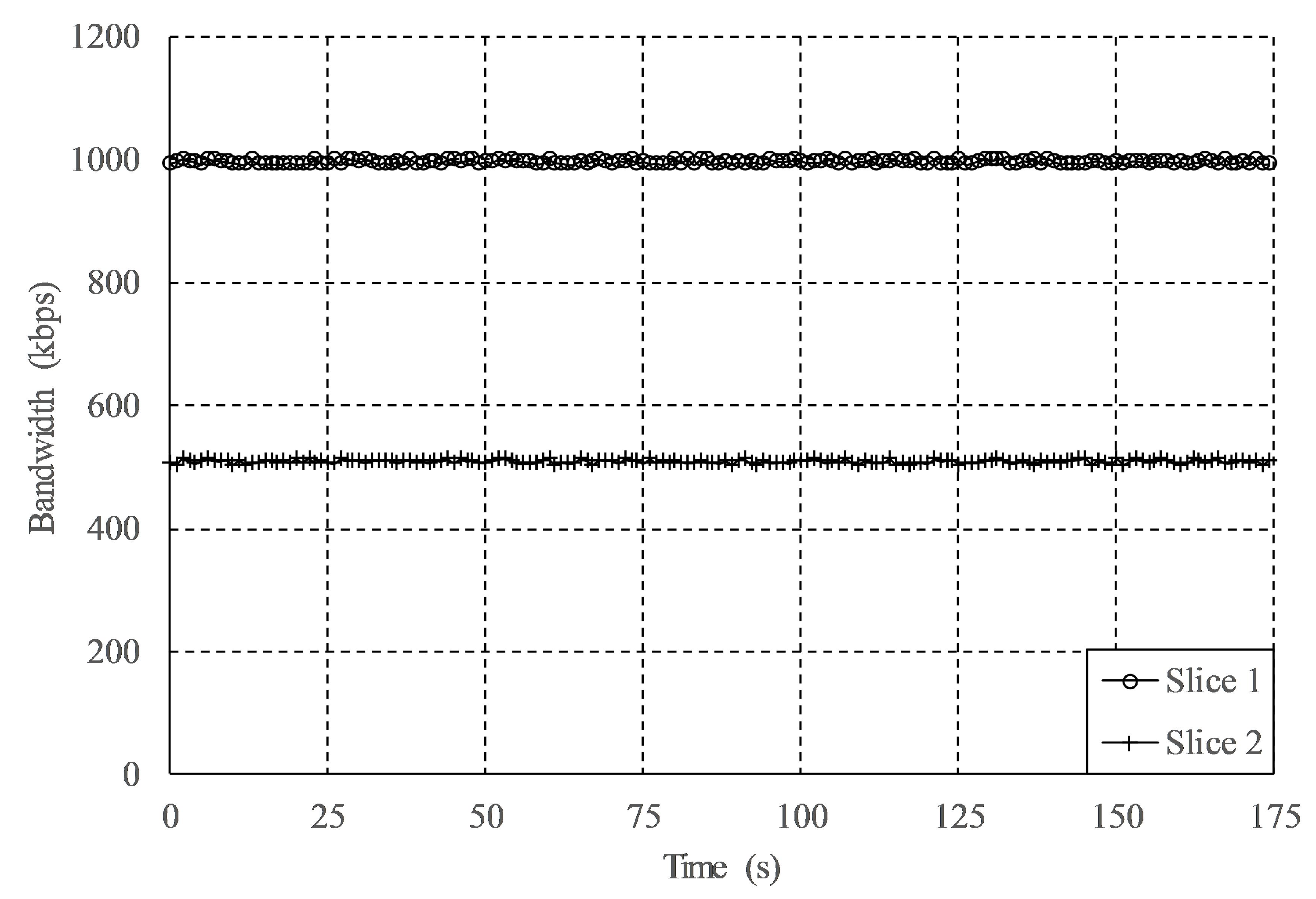
| Slice 1 | 60% | 80% |
| Slice 2 | 30% | 60% |
| Slice 3 | 10% | 20% |
| Connections | Throughput (Packets/s) | RTT (ms) |
|---|---|---|
| 1 GW (1000 devices) | 10.75 | 0.709 |
| 10 GW (10,000 devices) | 108.54 | 0.73 |
| 100 GW (100,000 devices) | 1053.3 | 0.72 |
| 1000 GW (1,000,000 devices) | 10,866.2 | 0.71 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez-Iborra, R.; Santa, J.; Gallego-Madrid, J.; Covaci, S.; Skarmeta, A. Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing. Sensors 2019, 19, 3107. https://doi.org/10.3390/s19143107
Sanchez-Iborra R, Santa J, Gallego-Madrid J, Covaci S, Skarmeta A. Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing. Sensors. 2019; 19(14):3107. https://doi.org/10.3390/s19143107
Chicago/Turabian StyleSanchez-Iborra, Ramon, José Santa, Jorge Gallego-Madrid, Stefan Covaci, and Antonio Skarmeta. 2019. "Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing" Sensors 19, no. 14: 3107. https://doi.org/10.3390/s19143107
APA StyleSanchez-Iborra, R., Santa, J., Gallego-Madrid, J., Covaci, S., & Skarmeta, A. (2019). Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing. Sensors, 19(14), 3107. https://doi.org/10.3390/s19143107