Figure 1.
Views of the nRF52840 DK receiver coupled to the orienting device (OD): (a) Horizontally and (b) vertically.
Figure 1.
Views of the nRF52840 DK receiver coupled to the orienting device (OD): (a) Horizontally and (b) vertically.
Figure 2.
Block diagram of the acquisition platform showing the EV3 unit with the orienting device (OD), the receiver (nRF52840 DK) and the laptop computer.
Figure 2.
Block diagram of the acquisition platform showing the EV3 unit with the orienting device (OD), the receiver (nRF52840 DK) and the laptop computer.
Figure 3.
Algorithms for the data collection process: (a) Reference points-database (RP-DB) and (b) Test points-database (TP-DB).
Figure 3.
Algorithms for the data collection process: (a) Reference points-database (RP-DB) and (b) Test points-database (TP-DB).
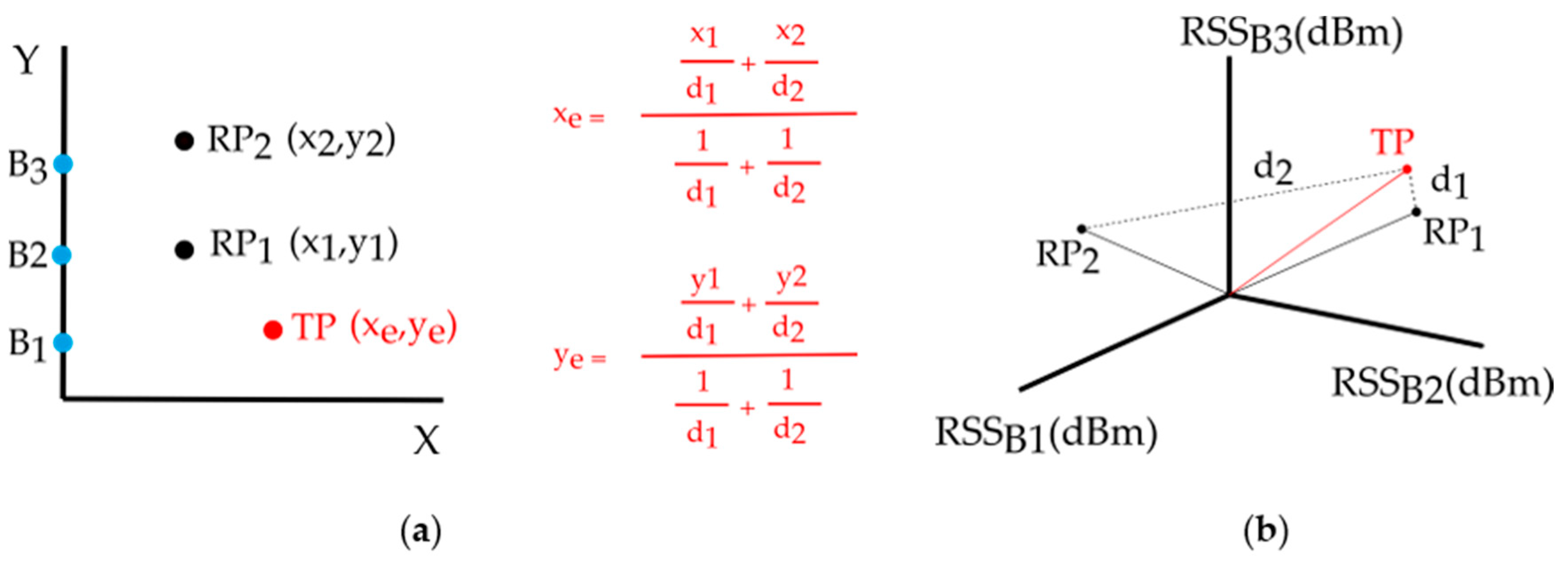
Figure 4.
Example of application of the weighted k-nearest neighbor (WKNN) algorithm for two reference points, RP1 and RP2, one test point, TP, and three beacons, B1, B2 and B3: (a) Calculation of the estimated coordinates as a weighted average of the coordinates of k-nearest RPs (k = 2) with the shortest distance to the TP in the signal space; (b) Euclidean distances of the RPs to the TP in the signal space.
Figure 4.
Example of application of the weighted k-nearest neighbor (WKNN) algorithm for two reference points, RP1 and RP2, one test point, TP, and three beacons, B1, B2 and B3: (a) Calculation of the estimated coordinates as a weighted average of the coordinates of k-nearest RPs (k = 2) with the shortest distance to the TP in the signal space; (b) Euclidean distances of the RPs to the TP in the signal space.
Figure 5.
View of the first scenario where TB1 is located.
Figure 5.
View of the first scenario where TB1 is located.
Figure 6.
View of the second scenario where TB2 is located.
Figure 6.
View of the second scenario where TB2 is located.
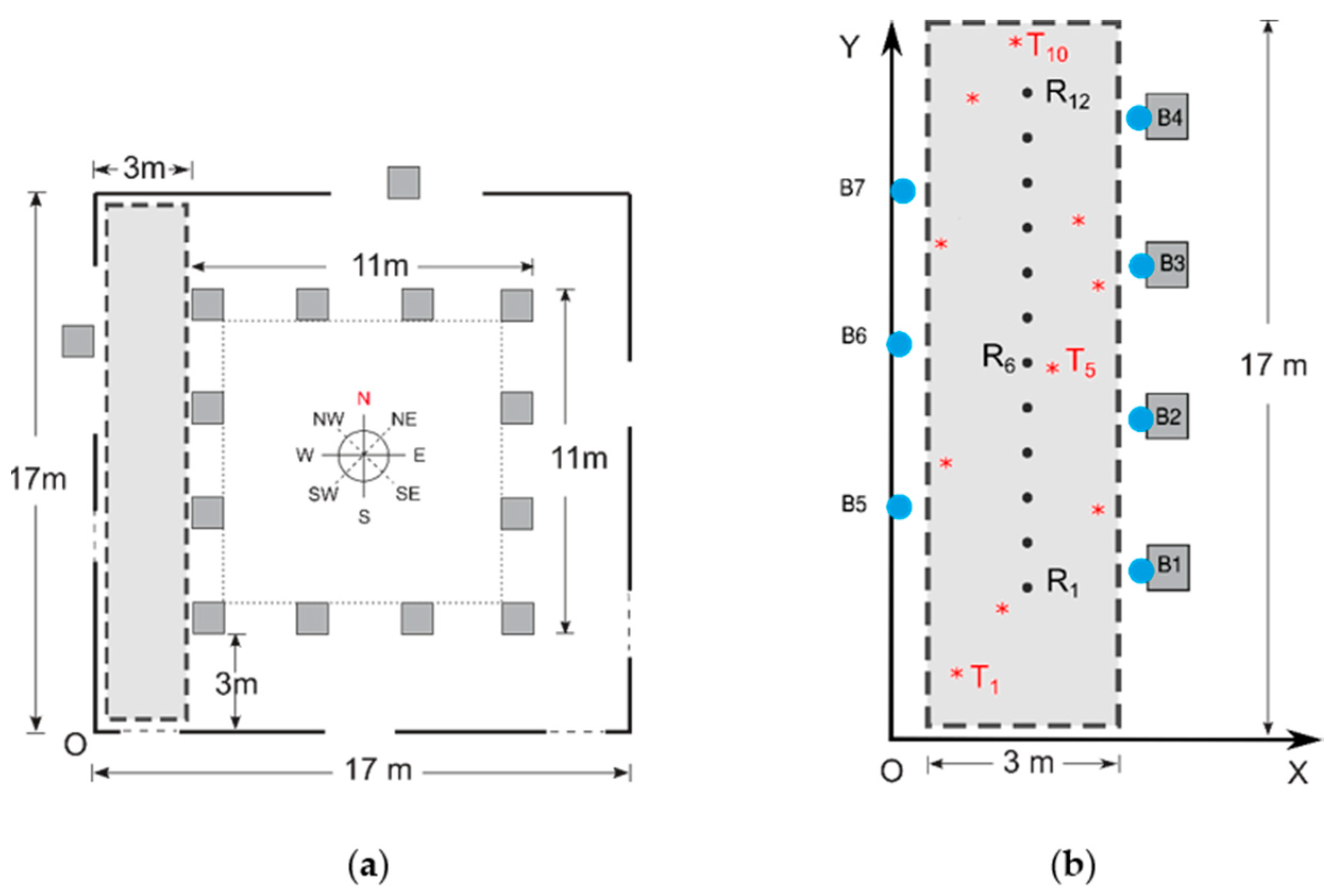
Figure 7.
Schematic view of the first scenario: (a) Dimensions and orientations, (b) beacons, RP and TP positions.
Figure 7.
Schematic view of the first scenario: (a) Dimensions and orientations, (b) beacons, RP and TP positions.
Figure 8.
Schematic view of the second scenario: (a) Dimensions and orientations, (b) beacons, RP and TP positions.
Figure 8.
Schematic view of the second scenario: (a) Dimensions and orientations, (b) beacons, RP and TP positions.
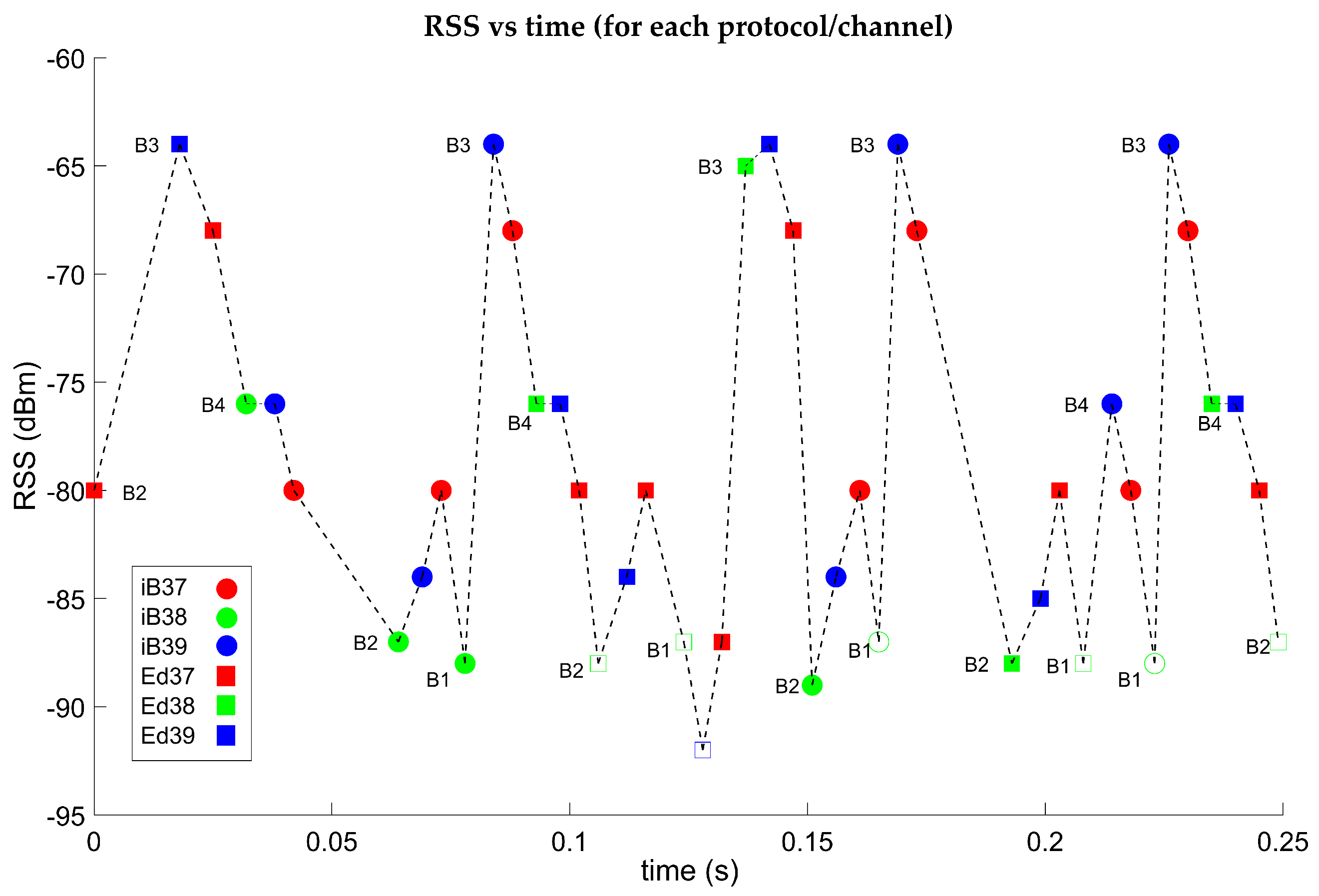
Figure 9.
Received signal strength (RSS) values vs. time for each protocol, channel and beacon. Dots represent iBeacon and squares Eddystone protocols respectively.
Figure 9.
Received signal strength (RSS) values vs. time for each protocol, channel and beacon. Dots represent iBeacon and squares Eddystone protocols respectively.
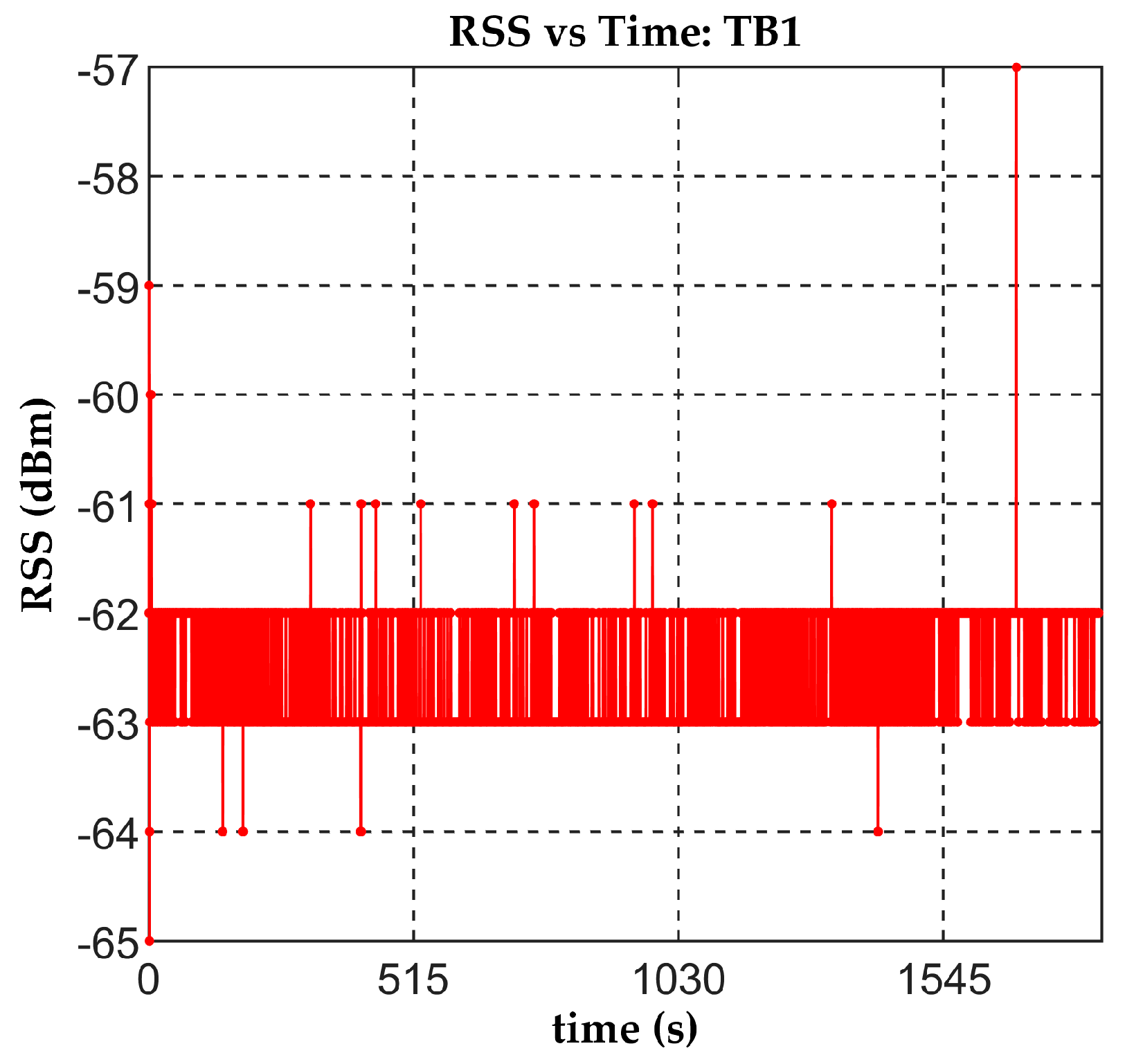
Figure 10.
Evolution of RSS during one hour for TB1.
Figure 10.
Evolution of RSS during one hour for TB1.
Figure 11.
Precision of Test #9 for Tx code 7, three advertising channels and (a) iBeacon protocol and (b) Eddystone protocol.
Figure 11.
Precision of Test #9 for Tx code 7, three advertising channels and (a) iBeacon protocol and (b) Eddystone protocol.
Table 1.
Transmitter power (Tx) codes in both brands of beacons.
Table 1.
Transmitter power (Tx) codes in both brands of beacons.
| Tx code | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|
| dBm | −20 | −16 | −12 | −8 | −4 | 0 | +4 |
Table 2.
Theoretical values for 15 s of sampling time and 1000 ms of advertising interval.
Table 2.
Theoretical values for 15 s of sampling time and 1000 ms of advertising interval.
Table 3.
Experimental value of for each of the seven beacons.
Table 3.
Experimental value of for each of the seven beacons.
| Beacon | B1 | B2 | B3 | B4 | B5 | B6 | B7 |
|---|
| 42 | 42 | 45 | 33 | 37 | 42 | 42 |
Table 4.
Principal configuration of the tests carried out and their main objectives.
Table 4.
Principal configuration of the tests carried out and their main objectives.
| Testbed | Test #: Main Setup | Objective |
|---|
| TB1 | #1: Receiver attached horizontally to OD (SoC nRF52832). | Effect of Tx on the positioning accuracy for a specific receiver orientation. |
| #2a: Receiver attached vertically to OD without presence of people (SoC nRF52832). | Idem |
| #2b: Idem #2a with presence of people (SoC nRF52832). | Idem |
| #3: Receiver attached vertically to OD (SoC nRF52810). | Idem |
| #4: Receiver attached vertically to OD with SoC nRF52832. | Effect of number of beacons on the positioning accuracy. |
| #5: Idem #4. | Effect of number of beacons and geometric distribution on the positioning accuracy. |
| #6a: Idem #4 without presence of people. | Effect of increasing the value of A on the positioning accuracy. |
| #7: Idem #4. | Effect of a lower grid density on the positioning accuracy. |
| #8: Idem #4 | Effect of removal of outliers on the positioning accuracy. |
| TB2 | #9: Idem #4. | Validate the positioning accuracy obtained in Test #4 for a beacon density in a different testbed. |
| #10: Idem #4. | Effect of number of beacons and geometric distribution on the positioning accuracy in a different testbed. |
| #11: Idem #4. | Effect of a lower grid density on the positioning accuracy in a different testbed. |
Table 5.
Main features of Tests #1.
Table 5.
Main features of Tests #1.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 4/1 beacon per 12.75 m2 |
| Tx code | 1, 5, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PP) |
| Presence of people in CPh and/or PPh | No |
Table 6.
Accuracy (in m) for Tests #1. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 6.
Accuracy (in m) for Tests #1. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 1 | Tx code = 5 | Tx code = 7 |
|---|
| k | Ch 37 |
| 1 | 1.4 | 1.4 | 1.5 | 1.4 | 1.5 | 1.5 |
| 2 | 1.6 | 1.6 | 1.5 | 1.6 | 1.6 | 1.6 |
| 3 | 1.7 | 1.7 | 1.7 | 1.8 | 1.7 | 1.7 |
| | Ch 38 |
| 1 | 1.9 | 2.0 | 1.8 | 1.6 | 1.7 | 1.7 |
| 2 | 1.8 | 1.9 | 1.7 | 1.8 | 1.6 | 1.6 |
| 3 | 1.9 | 1.9 | 1.9 | 1.9 | 1.8 | 1.8 |
| | Ch 39 |
| 1 | 2.0 | 1.9 | 2.1 | 2.1 | 1.5 | 1.4 |
| 2 | 2.1 | 2.0 | 1.9 | 2.2 | 1.7 | 1.7 |
| 3 | 1.9 | 1.9 | 1.8 | 2.0 | 1.9 | 1.9 |
Table 7.
Main features of Tests #2a and #2b.
Table 7.
Main features of Tests #2a and #2b.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 4/1 beacon per 12.75 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No (#2a)—Yes (#2b, PPh) |
Table 8.
Accuracy (in m) for Test #2a. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 8.
Accuracy (in m) for Test #2a. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 1 | Tx code = 7 |
|---|
| k | Ch 37 |
| 1 | 1.4 | 1.4 | 1.2 | 1.2 |
| 2 | 1.5 | 1.4 | 1.3 | 1.3 |
| 3 | 1.5 | 1.5 | 1.3 | 1.3 |
| | Ch 38 |
| 1 | 1.6 | 1.6 | 1.5 | 1.5 |
| 2 | 1.5 | 1.5 | 1.6 | 1.6 |
| 3 | 1.7 | 1.6 | 1.6 | 1.6 |
| | Ch 39 |
| 1 | 1.2 | 1.3 | 1.3 | 1.3 |
| 2 | 1.5 | 1.6 | 1.4 | 1.4 |
| 3 | 1.5 | 1.5 | 1.6 | 1.4 |
Table 9.
Comparison of accuracies (in m) for Tests #2a and #2b. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 9.
Comparison of accuracies (in m) for Tests #2a and #2b. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 7
(no people) | Tx code = 7
(people) |
|---|
| k | Ch 37 |
| 1 | 1.2 | 1.2 | 1.4 | 1.4 |
| 2 | 1.3 | 1.3 | 1.3 | 1.4 |
| 3 | 1.3 | 1.3 | 1.4 | 1.5 |
| | Ch 38 |
| 1 | 1.5 | 1.5 | 1.5 | 1.7 |
| 2 | 1.6 | 1.6 | 1.6 | 1.8 |
| 3 | 1.6 | 1.6 | 1.7 | 1.8 |
| | Ch 39 |
| 1 | 1.3 | 1.3 | 1.2 | 1.3 |
| 2 | 1.4 | 1.4 | 1.3 | 1.3 |
| 3 | 1.6 | 1.4 | 1.3 | 1.4 |
Table 10.
Main features of Tests #3.
Table 10.
Main features of Tests #3.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 4/1 beacon per 12.75 m2 |
| Tx code | 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No |
Table 11.
Accuracies (in m) for Test #3. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 11.
Accuracies (in m) for Test #3. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 7
(Kontakt) | Tx code = 7
(MINEW) |
|---|
| k | Ch 37 |
| 1 | 1.2 | 1.2 | 1.5 | 1.5 |
| 2 | 1.3 | 1.3 | 1.6 | 1.6 |
| 3 | 1.3 | 1.3 | 1.7 | 1.7 |
| | Ch 38 |
| 1 | 1.5 | 1.5 | 1.3 | 1.3 |
| 2 | 1.6 | 1.6 | 1.3 | 1.3 |
| 3 | 1.6 | 1.6 | 1.5 | 1.5 |
| | Ch 39 |
| 1 | 1.3 | 1.3 | 1.3 | 1.4 |
| 2 | 1.4 | 1.4 | 1.4 | 1.4 |
| 3 | 1.6 | 1.4 | 1.7 | 1.8 |
Table 12.
Main features of Tests #4.
Table 12.
Main features of Tests #4.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 7/1 beacon per 7.3 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No |
Table 13.
Accuracies (in m) for Tests #4. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 13.
Accuracies (in m) for Tests #4. For each Tx code, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 1 | Tx code = 7 |
|---|
| k | Ch 37 |
| 1 | 1.5 | 1.5 | 1.1 | 1.2 |
| 2 | 1.6 | 1.6 | 1.3 | 1.3 |
| 3 | 1.6 | 1.7 | 1.4 | 1.4 |
| | Ch 38 |
| 1 | 1.4 | 1.4 | 1.3 | 1.4 |
| 2 | 1.3 | 1.4 | 1.4 | 1.3 |
| 3 | 1.5 | 1.5 | 1.4 | 1.4 |
| | Ch 39 |
| 1 | 1.2 | 1.2 | 1.1 | 1.2 |
| 2 | 1.4 | 1.3 | 1.3 | 1.3 |
| 3 | 1.4 | 1.4 | 1.3 | 1.3 |
Table 14.
Main features of Tests #5.
Table 14.
Main features of Tests #5.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 2–7/1 beacon per 25.5 m2–7.3 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No |
Table 15.
Accuracies (in m) for Test #5,
Tx code 1. For each beacon combination, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 7b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
Table 15.
Accuracies (in m) for Test #5,
Tx code 1. For each beacon combination, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 7b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
| | 2 beacons | 3 beacons | 4 beacons | 4 beacons | 5 beacons | 5 beacons | 5 beacons | 6 beacons | 7 beacons |
|---|
| | 1,4 | 1,4,6 | 1,2,3,4 | 1,4,5,7 | 1,3,5,6,7 | 2,4,5,6,7 | 1,2,3,4,6 | 1,2,3,4,5,7 | 1,2,3,4,5,6,7 |
|---|
| k | Ch 37 |
| 1 | 2.0 | 2.0 | 1.6 | 1.6 | 1.4 | 1.4 | 1.5 | 1.5 | 1.5 | 1.5 | 1.7 | 1.6 | 1.4 | 1.5 | 1.4 | 1.4 | 1.5 | 1.5 |
| 2 | 2.0 | 1.8 | 1.6 | 1.6 | 1.5 | 1.4 | 1.5 | 1.5 | 1.6 | 1.6 | 1.6 | 1.6 | 1.5 | 1.5 | 1.4 | 1.4 | 1.6 | 1.6 |
| 3 | 1.9 | 1.9 | 1.7 | 1.6 | 1.5 | 1.5 | 1.5 | 1.5 | 1.7 | 1.8 | 1.6 | 1.6 | 1.6 | 1.6 | 1.5 | 1.5 | 1.6 | 1.7 |
| | Ch 38 |
| 1 | 2.3 | 2.2 | 1.3 | 1.4 | 1.6 | 1.6 | 1.9 | 1.9 | 2.5 | 2.6 | 1.3 | 1.3 | 1.4 | 1.4 | 1.6 | 1.6 | 1.4 | 1.4 |
| 2 | 2.1 | 2.1 | 1.6 | 1.6 | 1.5 | 1.5 | 1.9 | 1.9 | 2.4 | 2.4 | 1.3 | 1.3 | 1.3 | 1.4 | 1.7 | 1.8 | 1.3 | 1.4 |
| 3 | 2.3 | 2.2 | 2.0 | 2.0 | 1.7 | 1.6 | 2.0 | 2.0 | 2.1 | 2.3 | 1.8 | 1.8 | 1.6 | 1.5 | 1.7 | 1.7 | 1.5 | 1.5 |
| | Ch 39 |
| 1 | 2.1 | 2.3 | 1.4 | 1.4 | 1.2 | 1.3 | 1.6 | 1.4 | 2.5 | 2.4 | 1.3 | 1.2 | 1.2 | 1.2 | 1.4 | 1.4 | 1.2 | 1.2 |
| 2 | 2.1 | 2.0 | 1.4 | 1.4 | 1.5 | 1.6 | 1.4 | 1.4 | 2.0 | 1.9 | 1.3 | 1.3 | 1.4 | 1.4 | 1.4 | 1.3 | 1.4 | 1.3 |
| 3 | 2.1 | 2.1 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.9 | 1.8 | 1.4 | 1.3 | 1.4 | 1.4 | 1.5 | 1.5 | 1.4 | 1.4 |
Table 16.
Accuracies (in m) for Test #5,
Tx code 7. For each beacon combination, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 7b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
Table 16.
Accuracies (in m) for Test #5,
Tx code 7. For each beacon combination, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 7b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
| | 2 beacons | 3 beacons | 4 beacons | 4 beacons | 5 beacons | 5 beacons | 5 beacons | 6 beacons | 7 beacons |
|---|
| | 1,4 | 1,4,6 | 1,2,3,4 | 1,4,5,7 | 1,3,5,6,7 | 2,4,5,6,7 | 1,2,3,4,6 | 1,2,3,4,5,7 | 1,2,3,4,
5,6,7 |
|---|
| k | Ch 37 |
| 1 | 1.7 | 1.7 | 1.2 | 1.2 | 1.2 | 1.2 | 1.7 | 1.7 | 1.4 | 1.3 | 1.3 | 1.3 | 1.1 | 1.1 | 1.2 | 1.2 | 1.1 | 1.2 |
| 2 | 1.7 | 1.7 | 1.4 | 1.3 | 1.3 | 1.3 | 1.7 | 1.6 | 1.5 | 1.5 | 1.3 | 1.3 | 1.3 | 1.3 | 1.4 | 1.4 | 1.3 | 1.3 |
| 3 | 1.6 | 1.7 | 1.4 | 1.4 | 1.3 | 1.3 | 1.7 | 1.9 | 1.6 | 1.6 | 1.4 | 1.4 | 1.4 | 1.4 | 1.3 | 1.4 | 1.4 | 1.4 |
| k | Ch 38 |
| 1 | 2.2 | 2.1 | 2.0 | 1.4 | 1.5 | 1.5 | 1.8 | 1.6 | 1.6 | 1.6 | 1.3 | 1.3 | 1.3 | 1.4 | 1.5 | 1.7 | 1.3 | 1.4 |
| 2 | 2.1 | 2.1 | 1.7 | 1.6 | 1.6 | 1.6 | 1.8 | 1.9 | 2.1 | 2.0 | 1.3 | 1.4 | 1.3 | 1.3 | 1.6 | 1.6 | 1.4 | 1.3 |
| 3 | 2.1 | 2.2 | 1.7 | 1.7 | 1.6 | 1.6 | 1.8 | 2.0 | 1.9 | 1.9 | 1.5 | 1.4 | 1.4 | 1.4 | 1.6 | 1.6 | 1.4 | 1.4 |
| k | Ch 39 |
| 1 | 1.9 | 1.9 | 1.5 | 1.3 | 1.3 | 1.3 | 1.9 | 1.8 | 2.4 | 2.4 | 1.2 | 1.2 | 1.1 | 1.2 | 1.6 | 1.6 | 1.1 | 1.2 |
| 2 | 2.0 | 2.0 | 1.5 | 1.5 | 1.4 | 1.4 | 1.8 | 1.8 | 2.4 | 2.4 | 1.3 | 1.3 | 1.3 | 1.3 | 1.7 | 1.7 | 1.3 | 1.3 |
| 3 | 2.0 | 2.0 | 1.5 | 1.5 | 1.6 | 1.4 | 1.8 | 1.8 | 2.2 | 2.2 | 1.3 | 1.5 | 1.3 | 1.4 | 1.6 | 1.7 | 1.3 | 1.3 |
Table 17.
Main features of Tests #6.
Table 17.
Main features of Tests #6.
| Feature | Value |
|---|
| No. of RP/TP | 12/10 |
| No. of beacons/density | 7/1 beacon per 7.3 m2 |
| Tx code | 7 |
| A | 500 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No (#6a)—Yes (#6b, PPh) |
Table 18.
Comparison of accuracies (in m) for Test #6a. For each value of A, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 18.
Comparison of accuracies (in m) for Test #6a. For each value of A, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | A = 100 | A = 500 |
|---|
| k | Ch 37 |
| 1 | 1.1 | 1.2 | 1.2 | 1.2 |
| 2 | 1.3 | 1.3 | 1.3 | 1.3 |
| 3 | 1.4 | 1.4 | 1.4 | 1.4 |
| | Ch 38 |
| 1 | 1.3 | 1.4 | 1.3 | 1.4 |
| 2 | 1.4 | 1.3 | 1.3 | 1.3 |
| 3 | 1.4 | 1.4 | 1.4 | 1.4 |
| | Ch 39 |
| 1 | 1.1 | 1.2 | 1.2 | 1.2 |
| 2 | 1.3 | 1.3 | 1.3 | 1.3 |
| 3 | 1.3 | 1.3 | 1.3 | 1.3 |
Table 19.
Comparison of accuracies (in m) for Tests #6a and #6b. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are symbolized as Ch 37, etc. and the number of neighbors in the WKNN algorithm as k.
Table 19.
Comparison of accuracies (in m) for Tests #6a and #6b. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are symbolized as Ch 37, etc. and the number of neighbors in the WKNN algorithm as k.
| | Tx code = 7 (no people) | Tx code = 7 (people) |
|---|
| k | iB37 | Ed37 | iB37 | Ed37 |
| 1 | 1.2 | 1.2 | 1.1 | 1.1 |
| 2 | 1.3 | 1.3 | 1.3 | 1.3 |
| 3 | 1.4 | 1.4 | 1.4 | 1.3 |
| | iB38 | Ed38 | iB38 | Ed38 |
| 1 | 1.3 | 1.4 | 1.3 | 1.3 |
| 2 | 1.3 | 1.3 | 1.5 | 1.4 |
| 3 | 1.4 | 1.4 | 1.5 | 1.6 |
| | iB39 | Ed39 | iB39 | Ed39 |
| 1 | 1.2 | 1.2 | 1.3 | 1.2 |
| 2 | 1.3 | 1.3 | 1.3 | 1.3 |
| 3 | 1.3 | 1.3 | 1.4 | 1.4 |
Table 20.
Main features of Tests #7.
Table 20.
Main features of Tests #7.
| Feature | Value |
|---|
| No. of RP/TP | 6/10 |
| No. of beacons/density | 7/1 beacon per 7.3 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 15 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | No |
Table 21.
Accuracy (in m) for Tests #7. For each number of RP, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 21.
Accuracy (in m) for Tests #7. For each number of RP, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| Tx code = 1 | Tx code = 7 |
|---|
| | RP = 12 | RP = 6 | RP = 12 | RP = 6 |
|---|
| k | Ch 37 |
| 1 | 1.5 | 1.5 | 1.5 | 1.5 | 1.1 | 1.2 | 1.3 | 1.3 |
| 2 | 1.6 | 1.6 | 1.8 | 1.8 | 1.3 | 1.3 | 1.6 | 1.6 |
| 3 | 1.6 | 1.7 | 2.1 | 2.1 | 1.4 | 1.4 | 1.8 | 1.8 |
| | Ch 38 |
| 1 | 1.4 | 1.4 | 1.3 | 1.3 | 1.3 | 1.4 | 1.3 | 1.3 |
| 2 | 1.5 | 1.4 | 1.8 | 1.9 | 1.4 | 1.3 | 1.8 | 1.6 |
| 3 | 1.5 | 1.5 | 2.0 | 2.1 | 1.4 | 1.4 | 1.8 | 1.8 |
| | Ch 39 |
| 1 | 1.2 | 1.2 | 1.3 | 1.3 | 1.1 | 1.2 | 1.3 | 1.3 |
| 2 | 1.4 | 1.3 | 1.6 | 1.5 | 1.3 | 1.3 | 1.6 | 1.6 |
| 3 | 1.4 | 1.4 | 2.0 | 2.0 | 1.3 | 1.3 | 1.8 | 1.9 |
Table 22.
Comparison of accuracies (in m) for Tests #4 and #8. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 22.
Comparison of accuracies (in m) for Tests #4 and #8. For each option, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 1 | Tx code = 1 (outl. rem.) |
|---|
| k | Ch 37 |
| 1 | 1.5 | 1.5 | 1.4 | 1.4 |
| 2 | 1.6 | 1.6 | 1.5 | 1.5 |
| 3 | 1.6 | 1.7 | 1.5 | 1.5 |
| | Ch 38 |
| 1 | 1.4 | 1.4 | 1.3 | 1.3 |
| 2 | 1.3 | 1.4 | 1.3 | 1.3 |
| 3 | 1.5 | 1.5 | 1.4 | 1.5 |
| | Ch 39 |
| 1 | 1.2 | 1.2 | 1.1 | 1.1 |
| 2 | 1.4 | 1.3 | 1.3 | 1.3 |
| 3 | 1.4 | 1.4 | 1.4 | 1.4 |
Table 23.
Main features of Tests #9.
Table 23.
Main features of Tests #9.
| Feature | Value |
|---|
| No. of RP/TP | 16/14 |
| No. of beacons/density | 14/1 beacon per 8 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 30 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | Yes. |
Table 24.
Accuracies (in m) for Tests #9. For each value of A, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 24.
Accuracies (in m) for Tests #9. For each value of A, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| | Tx code = 1 | Tx code = 7 |
|---|
| k | Ch 37 |
| 1 | 2.0 | 2.0 | 1.8 | 1.8 |
| 2 | 2.0 | 1.9 | 1.8 | 1.7 |
| 3 | 2.0 | 2.0 | 1.9 | 1.9 |
| | Ch 38 |
| 1 | 2.2 | 2.3 | 1.9 | 1.9 |
| 2 | 2.1 | 2.1 | 1.9 | 2.0 |
| 3 | 2.0 | 2.1 | 1.9 | 2.0 |
| | Ch 39 |
| 1 | 1.9 | 1.9 | 1.7 | 1.7 |
| 2 | 1.9 | 1.8 | 1.7 | 1.7 |
| 3 | 2.1 | 2.0 | 1.9 | 2.0 |
Table 25.
Main features of Tests #10.
Table 25.
Main features of Tests #10.
| Feature | Value |
|---|
| No. of RP/TP | 16/14 |
| No. of beacons/density | 7–14/1 beacon per 16 m2–8 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 30 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | Yes |
Table 26.
Accuracies (in m) for Tests #10,
Tx code 1. For each number of beacons, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 8b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
Table 26.
Accuracies (in m) for Tests #10,
Tx code 1. For each number of beacons, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 8b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
| | 7 beacons | 7 beacons | 8 beacons | 11 beacons | 11 beacons | 14 beacons |
|---|
| | 1,3,5,7,9,11,13 | 2,4,6,8,10,12,14 | 1,5,9,13
2,6,10,14 | 1,3,5,7,9,11,13
2,6,10,14 | 1,5,9,13
2,4,6,8,10,12,14 | 1,3,5,7,9,11,13
2,4,6,8,10,12,14 |
|---|
| k | Ch 37 |
| 1 | 2.1 | 2.1 | 2.0 | 2.1 | 2.4 | 2.2 | 2.3 | 2.0 | 2.1 | 2.0 | 2.0 | 2.0 |
| 2 | 2.1 | 2.1 | 2.0 | 2.1 | 2.2 | 2.2 | 2.1 | 2.1 | 2.0 | 2.0 | 2.0 | 1.9 |
| 3 | 2.1 | 2.0 | 2.0 | 2.1 | 2.1 | 2.1 | 2.1 | 2.1 | 2.0 | 2.0 | 2.0 | 2.0 |
| | Ch 38 |
| 1 | 2.2 | 3.2 | 2.4 | 2.4 | 2.2 | 2.3 | 2.1 | 2.3 | 2.3 | 2.4 | 2.2 | 2.3 |
| 2 | 2.6 | 3.0 | 2.2 | 2.3 | 2.0 | 2.0 | 1.9 | 2.0 | 2.1 | 2.1 | 2.1 | 2.1 |
| 3 | 2.6 | 3.1 | 2.2 | 2.2 | 2.1 | 2.1 | 2.0 | 2.2 | 2.2 | 2.1 | 2.0 | 2.1 |
| | Ch 39 |
| 1 | 2.0 | 1.9 | 3.0 | 2.9 | 2.1 | 2.2 | 2.0 | 1.9 | 2.0 | 2.3 | 1.9 | 1.9 |
| 2 | 1.8 | 1.8 | 2.7 | 2.5 | 2.1 | 2.1 | 1.9 | 1.8 | 2.0 | 2.0 | 1.9 | 1.8 |
| 3 | 2.0 | 1.9 | 2.5 | 2.4 | 2.2 | 2.2 | 2.0 | 2.0 | 2.1 | 2.2 | 2.1 | 2.0 |
Table 27.
Accuracies (in m) for Tests #10,
Tx code 7. For each number of beacons, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 8b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
Table 27.
Accuracies (in m) for Tests #10,
Tx code 7. For each number of beacons, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The first row shows the total number of beacons and the second shows the labels of the beacons used (see
Figure 8b). The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as
k.
| | 7 beacons | 7 beacons | 8 beacons | 11 beacons | 11 beacons | 14 beacons |
|---|
| | 1,3,5,7,9,11,13 | 2,4,6,8,10,12,14 | 1,5,9,13
2,6,10,14 | 1,3,5,7,9,11,13
2,6,10,14 | 1,5,9,13
2,4,6,8,10,12,14 | 1,3,5,7,9,11,13
2,4,6,8,10,12,14 |
|---|
| k | Ch 37 |
| 1 | 2.1 | 2.0 | 2.1 | 2.1 | 2.0 | 2.0 | 1.9 | 1.9 | 1.8 | 1.8 | 1.8 | 1.8 |
| 2 | 2.2 | 2.0 | 1.9 | 2.4 | 1.9 | 2.0 | 1.9 | 1.8 | 1.9 | 1.8 | 1.8 | 1.7 |
| 3 | 2.2 | 1.9 | 2.2 | 2.2 | 2.0 | 2.0 | 2.0 | 2.0 | 2.0 | 2.0 | 1.9 | 1.9 |
| | Ch 38 |
| 1 | 2.9 | 2.9 | 1.9 | 2.0 | 2.3 | 2.3 | 2.0 | 2.0 | 2.0 | 2.0 | 1.9 | 1.9 |
| 2 | 2.6 | 2.6 | 2.0 | 2.0 | 2.1 | 2.1 | 1.9 | 1.9 | 2.0 | 2.1 | 1.9 | 2.0 |
| 3 | 2.6 | 2.5 | 2.0 | 2.0 | 2.1 | 2.1 | 1.9 | 1.9 | 2.0 | 2.0 | 1.9 | 2.0 |
| | Ch 39 |
| 1 | 1.9 | 1.9 | 1.9 | 1.9 | 1.8 | 1.8 | 1.7 | 1.7 | 1.8 | 1.7 | 1.7 | 1.7 |
| 2 | 2.0 | 1.9 | 1.8 | 1.9 | 1.8 | 1.7 | 1.7 | 1.7 | 1.8 | 1.7 | 1.7 | 1.7 |
| 3 | 2.0 | 2.1 | 2.1 | 2.2 | 1.8 | 1.9 | 1.9 | 1.9 | 1.8 | 1.9 | 1.9 | 2.0 |
Table 28.
Main features of Tests #11.
Table 28.
Main features of Tests #11.
| Feature | Value |
|---|
| No. of RP/TP | 8/14 |
| No. of beacons/density | 14/1 beacon per 8 m2 |
| Tx code | 1, 7 |
| A | 100 ms |
| Sampling time per point (CPh/PPh) | 30 s (8 samples PPh) |
| Presence of people in CPh and/or PPh | Yes |
Table 29.
Accuracy (in m) for Tests #11. For each number of RP, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
Table 29.
Accuracy (in m) for Tests #11. For each number of RP, the first and second data columns refer to the iBeacon and Eddystone protocol respectively. The three advertising channels are referred to as Ch 37, etc., and the number of neighbors in the WKNN algorithm, as k.
| Tx code = 1 | Tx code = 7 |
|---|
| | RP = 16 | RP = 8 | RP = 16 | RP = 8 |
|---|
| k | Ch 37 |
| 1 | 2.0 | 2.0 | 2.1 | 2.1 | 1.8 | 1.8 | 2.0 | 2.0 |
| 2 | 2.0 | 1.9 | 2.2 | 2.0 | 1.8 | 1.7 | 2.1 | 2.1 |
| 3 | 2.0 | 2.0 | 2.4 | 2.4 | 1.9 | 1.9 | 2.4 | 2.4 |
| | Ch 38 |
| 1 | 2.2 | 2.3 | 2.1 | 2.2 | 1.9 | 1.9 | 2.1 | 2.2 |
| 2 | 2.1 | 2.1 | 2.2 | 2.6 | 1.9 | 2.0 | 2.1 | 2.2 |
| 3 | 2.0 | 2.1 | 2.7 | 2.7 | 1.9 | 2.0 | 2.7 | 2.7 |
| | Ch 39 |
| 1 | 1.9 | 1.9 | 2.2 | 2.0 | 1.7 | 1.7 | 1.9 | 1.9 |
| 2 | 1.9 | 1.8 | 2.2 | 2.3 | 1.7 | 1.7 | 1.9 | 1.9 |
| 3 | 2.1 | 2.0 | 2.4 | 2.4 | 1.9 | 2.0 | 2.4 | 2.4 |
Table 30.
Main conclusions about positioning accuracy for the different tests.
Table 30.
Main conclusions about positioning accuracy for the different tests.
| Testbed | Test #: Main Setup | Main Conclusions about Accuracy |
|---|
| TB1 | #1: Receiver attached horizontally to OD (SoC nRF52832). | Of the two orientations in which the receiver had been arranged, the vertical was the one that offered the best results. In addition, the presence of people had not worsened the results significantly. |
| #2a: Receiver attached vertically to OD without presence of people (SoC nRF52832). |
| #2b: Idem #2a with presence of people (SoC nRF52832). |
| #3: Receiver attached vertically to OD (SoC nRF52810). | The performance of SoC nRF52832 was in general the best. |
| #4: Receiver attached vertically to OD with SoC nRF52832. |
| #5: Idem #4. | It was possible to reduce the number of beacons, increase the value of A and lower the density of the grid while keeping errors to a limit. |
| #6a: Idem #4 without presence of people. |
| #7: Idem #4. |
| #8: Idem #4 | Removal of outliers did not have a significant impact. |
| TB2 | #9: Idem #4. | It was confirmed in another scenario that it was possible to reduce the number of beacons and lower the density of the grid while keeping errors to a limit. |
| #10: Idem #4. |
| #11: Idem #4. |
Table 31.
Influence of Tx and beacon density on positioning accuracy with beacons integrating SoC nRF52832, with a receptor nRF52840 in a vertical orientation and A = 100 ms.
Table 31.
Influence of Tx and beacon density on positioning accuracy with beacons integrating SoC nRF52832, with a receptor nRF52840 in a vertical orientation and A = 100 ms.
| Tx (dBm) | Beacon Density | Accuracy (m) |
|---|
| +4 | 1 per 8 m2 | 1.8 |
| −20 | 1 per 8 m2 | 2.1 |
| +4 | 1 per 16 m2 | 2.0 |
| −20 | 1 per 16 m2 | 2.1 |
| +4 | 1 per 12.3 m2 | 1.8 |
| −20 | 1 per 12.3 m2 | 2.1 |
Table 32.
Test duration comparison for a semi-automatic and a manual data collection system.
Table 32.
Test duration comparison for a semi-automatic and a manual data collection system.
| Test # | Sampling Time (s) | Number of RPs | Test Duration without Semi-Automatic System (min) | Test Duration with Semi-Automatic System (min) |
|---|
| #1 - #6 | 15 | 12 | 72 | 24 |
| #7 | 15 | 6 | 36 | 12 |
| #9 - #10 | 30 | 16 | 128 | 64 |
| #11 | 30 | 8 | 64 | 32 |
Table 33.
Precision comparison between different works including our proposal.
Table 33.
Precision comparison between different works including our proposal.
| Work | Grid Density (RPs/m2) | Precision (%–m) |
|---|
| Kajioka [42] | 0.34 | 96.6–0.8 |
| Powar [45] | 0.43 | 90–13.2 |
| Subedi [51] | 3.0 | 90–3.0 |
| Castillo [64] | 0.26 | 92.5–3.0 |
| Presented work | 0.12 | 90–2.6 |

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}