SINS/Landmark Integrated Navigation Based on Landmark Attitude Determination

Abstract
1. Introduction
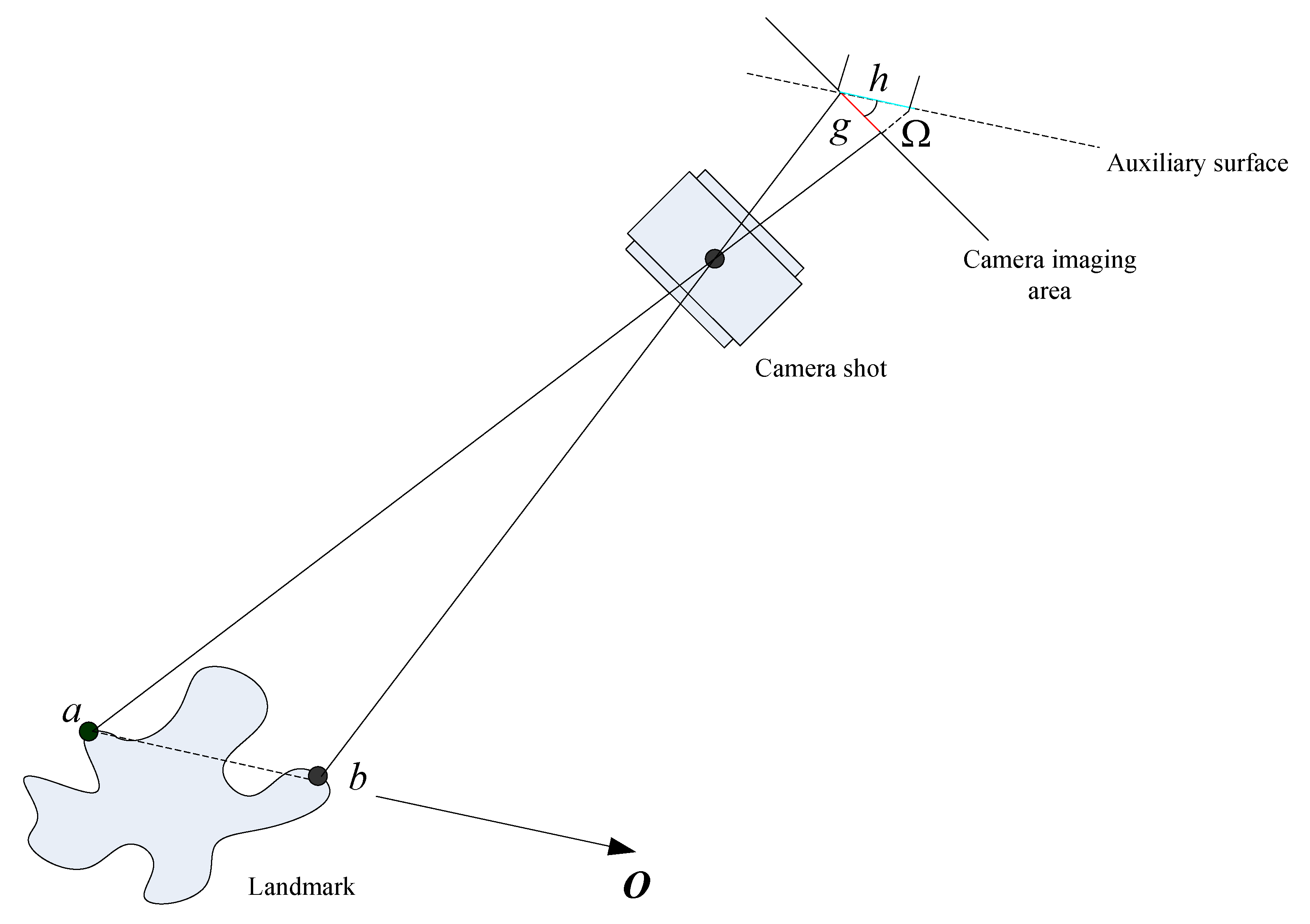
2. Principles of Landmark Navigation
2.1. Acquisition of Landmark Information
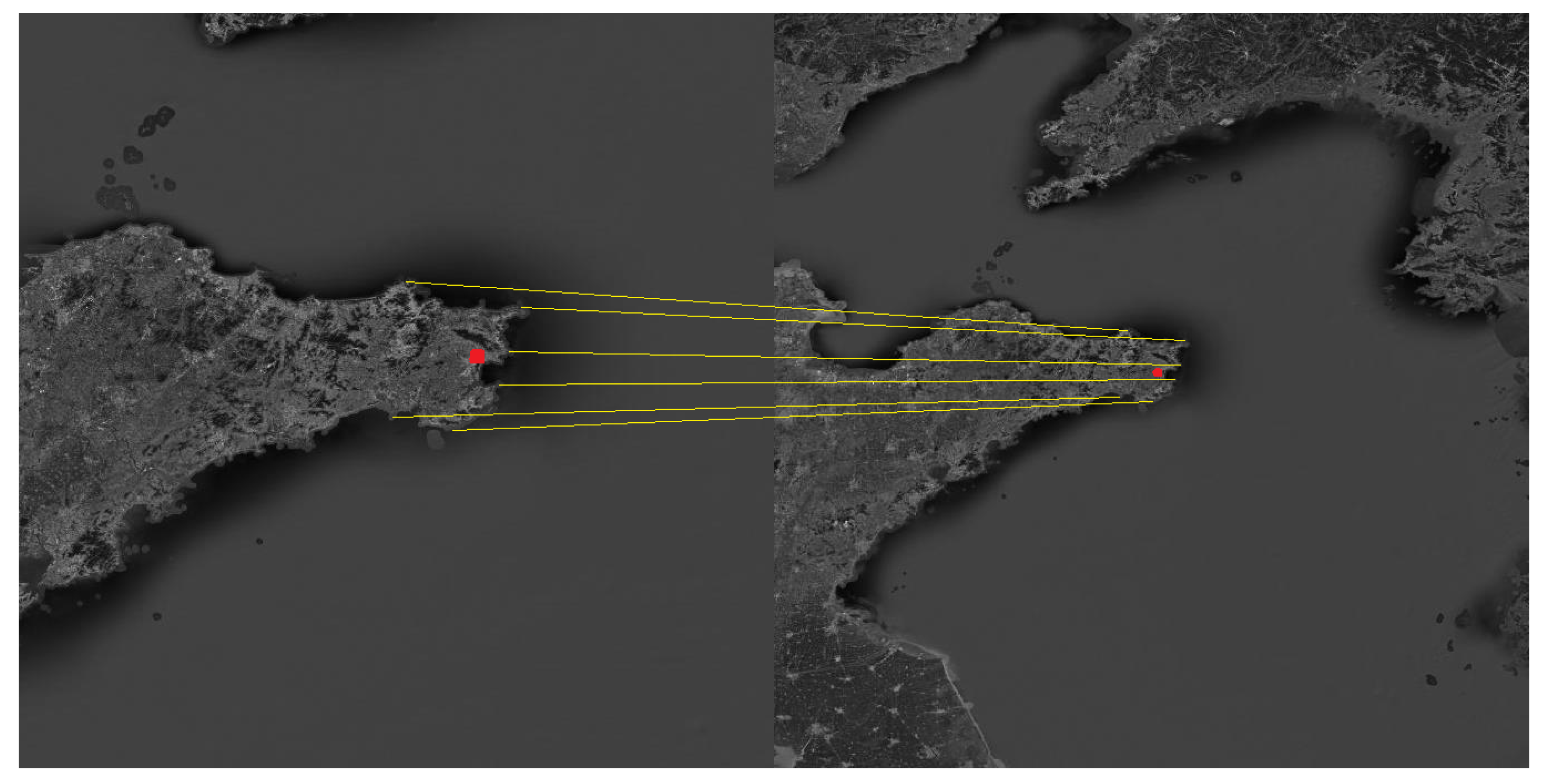
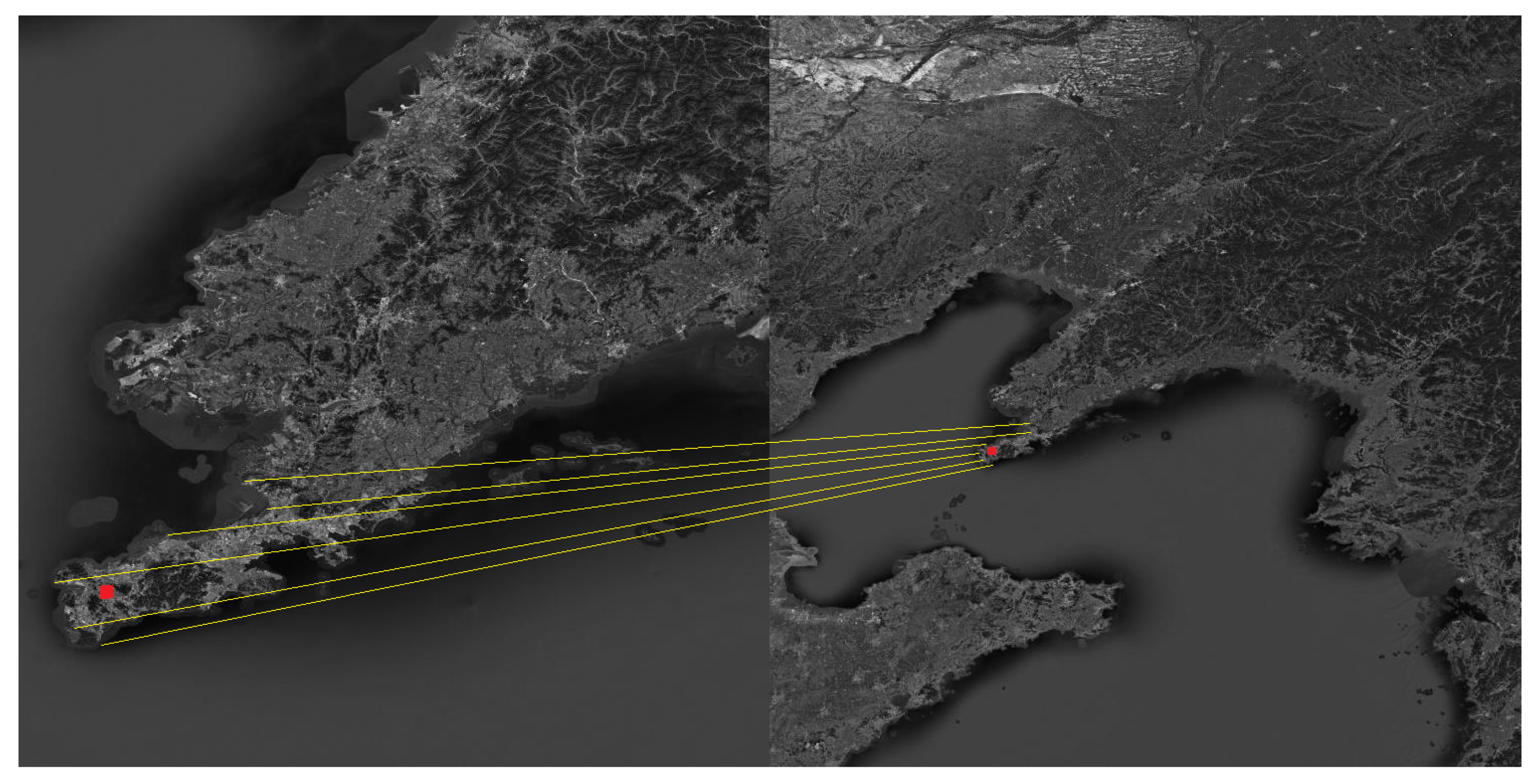
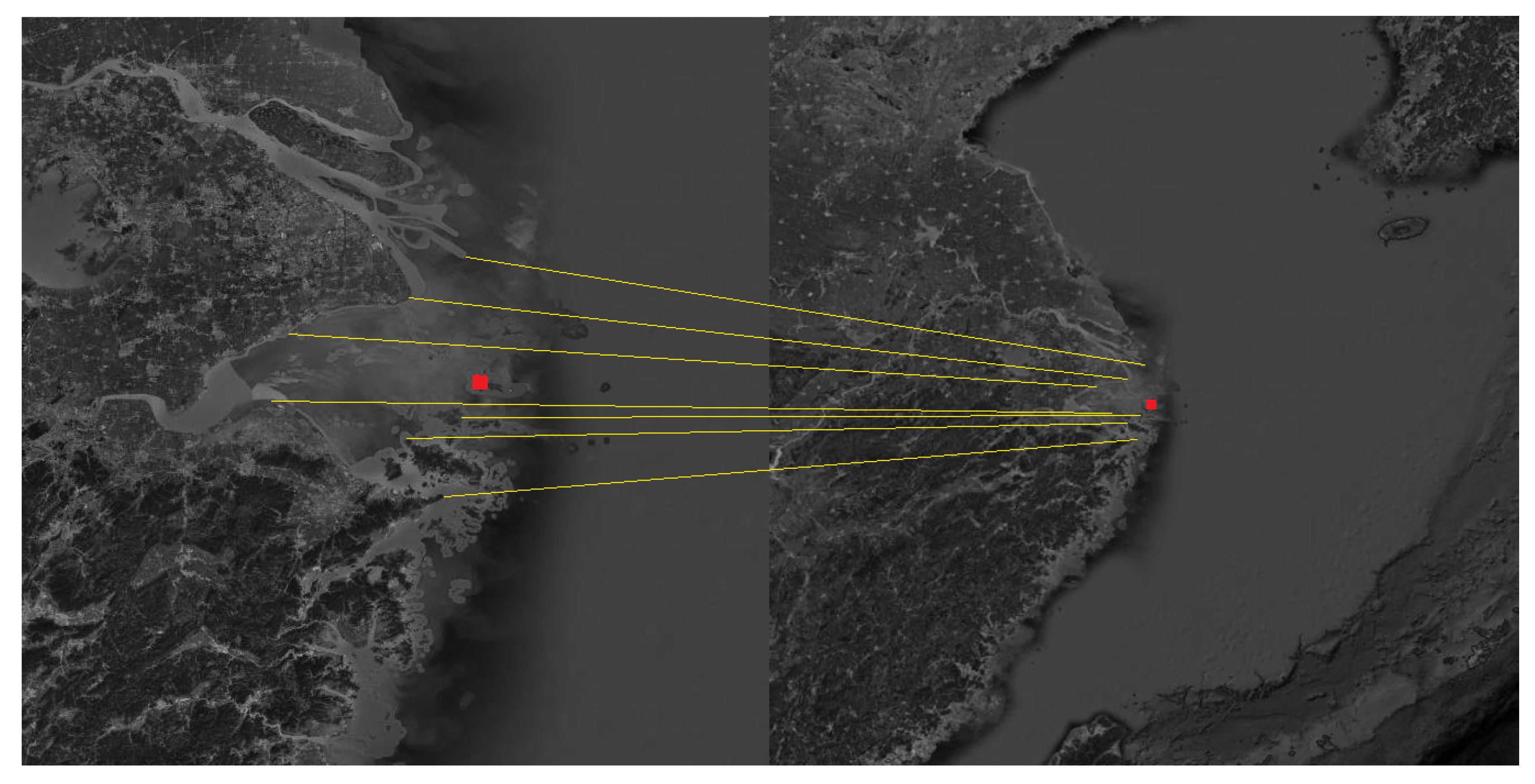
2.2. Matching Process of the Landmark Images
3. Position and Attitude Determination of the Landmark Navigation
3.1. Attitude Determination of the Landmark Navigation
3.1.1. Calculation for Attitude Angle
3.1.2. Computability of the Transformation Matrix
3.1.3. The Relationship between the Number, Relevance and Accuracy of Landmarks
3.2. Position Determination of Landmark Navigation
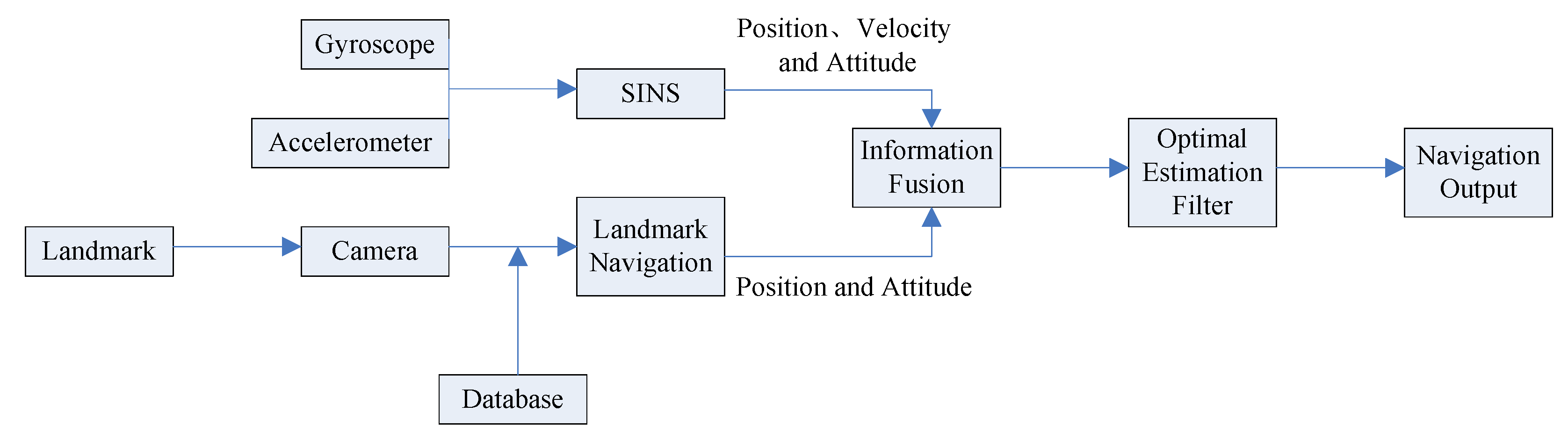
4. SINS/Landmark Integrated Navigation Model
4.1. State Equation of Integrated Navigation
4.2. Measurement Equation of Integrated Navigation
4.3. Integrated Navigation Filtering Algorithm
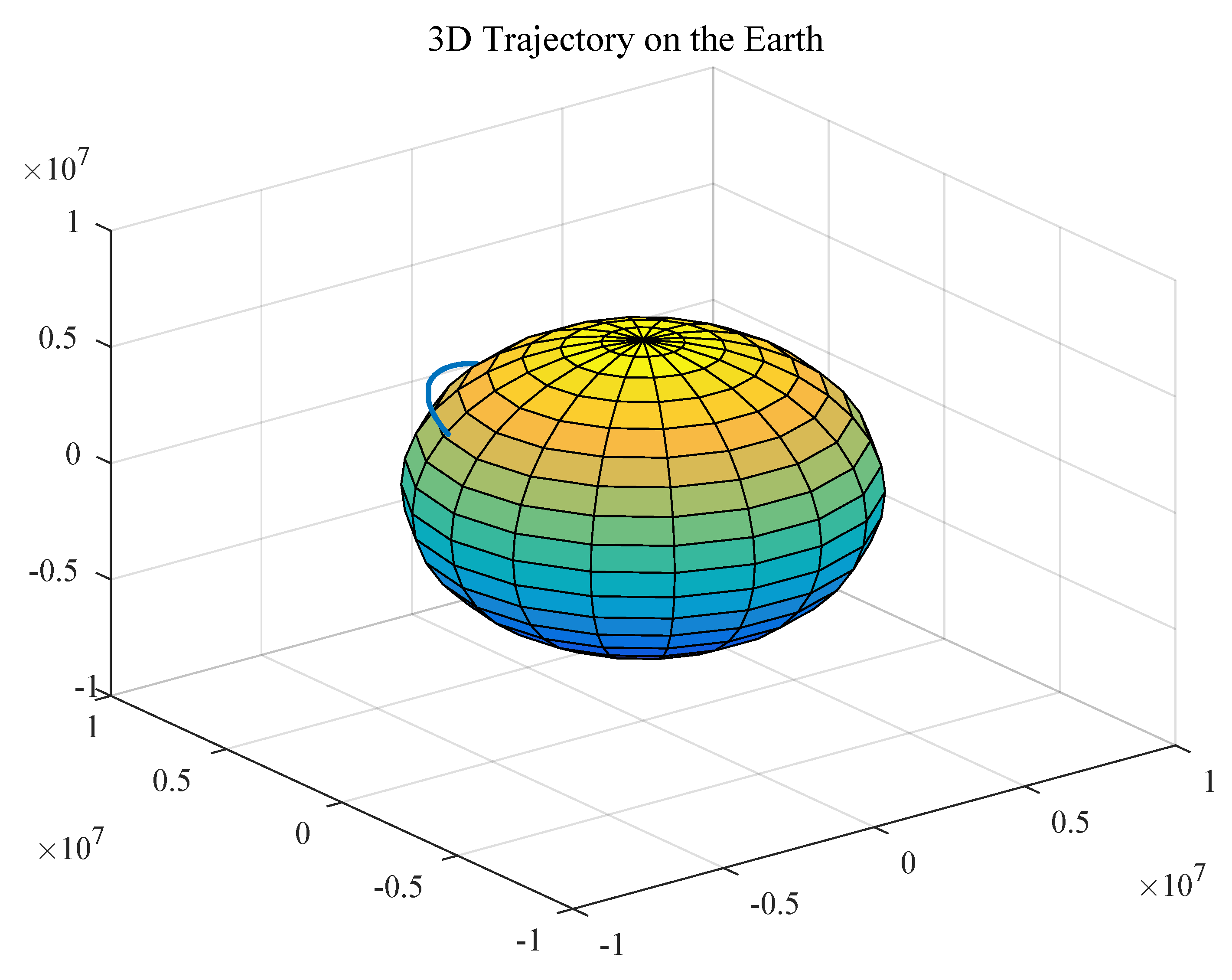
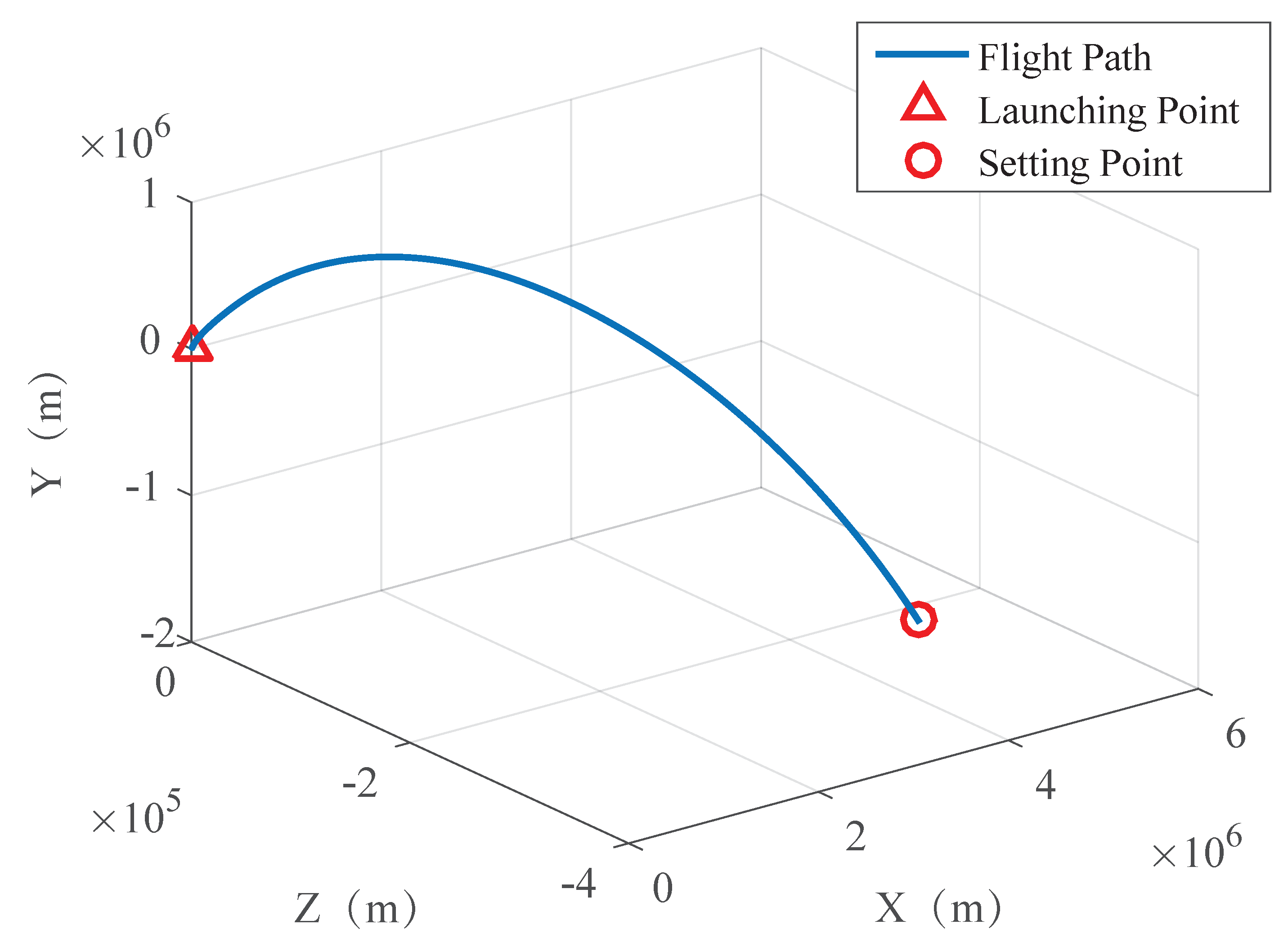
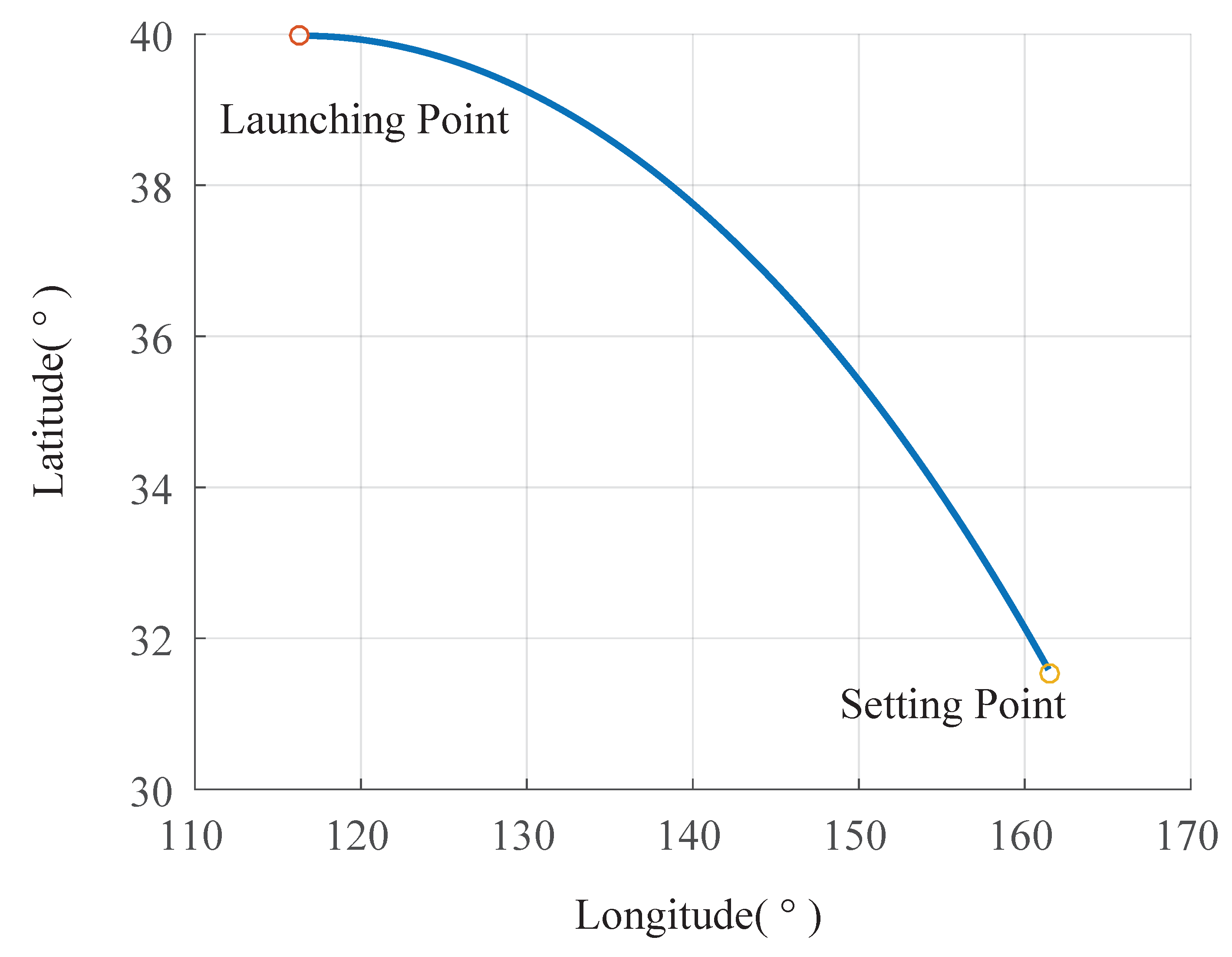
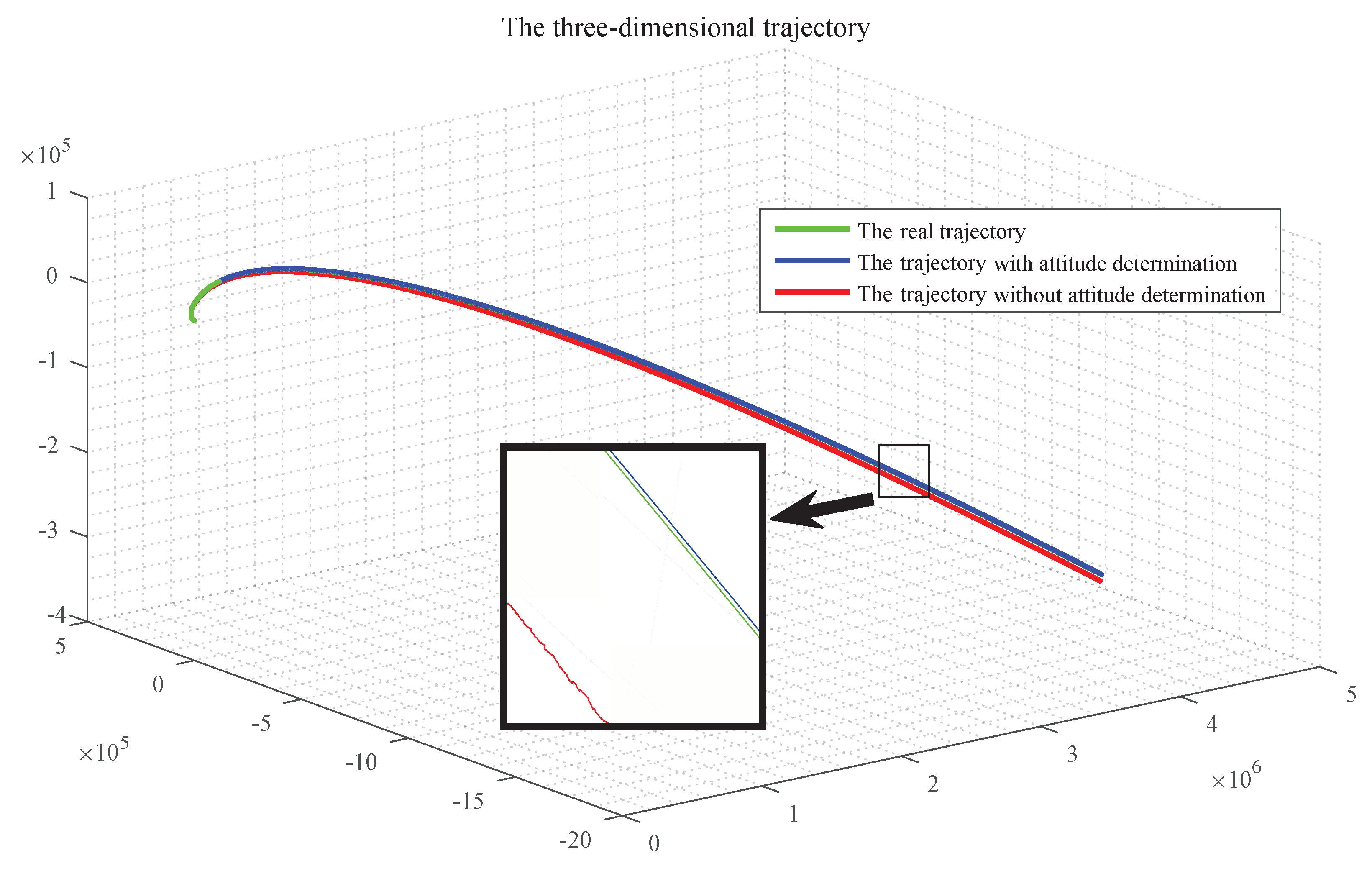
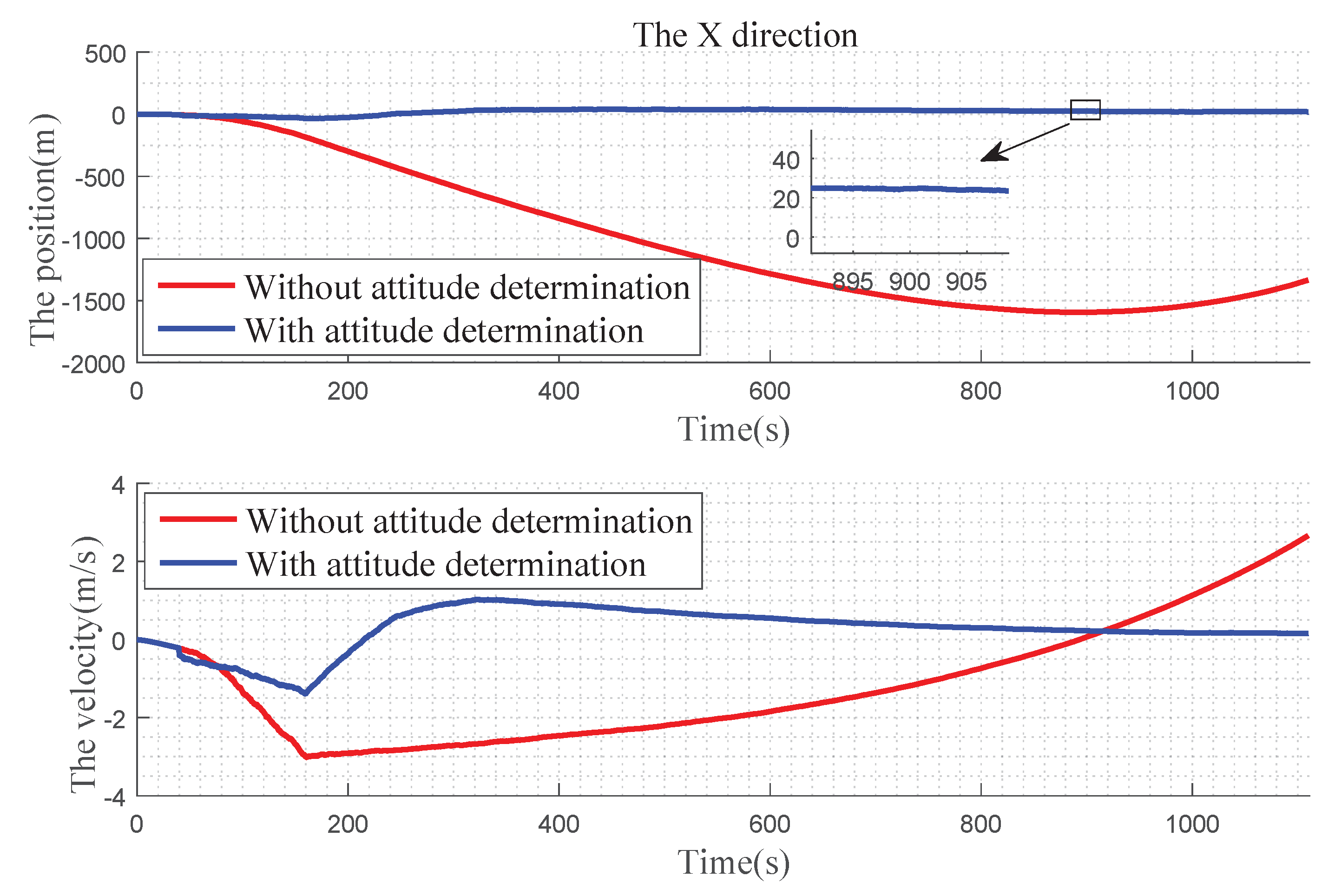
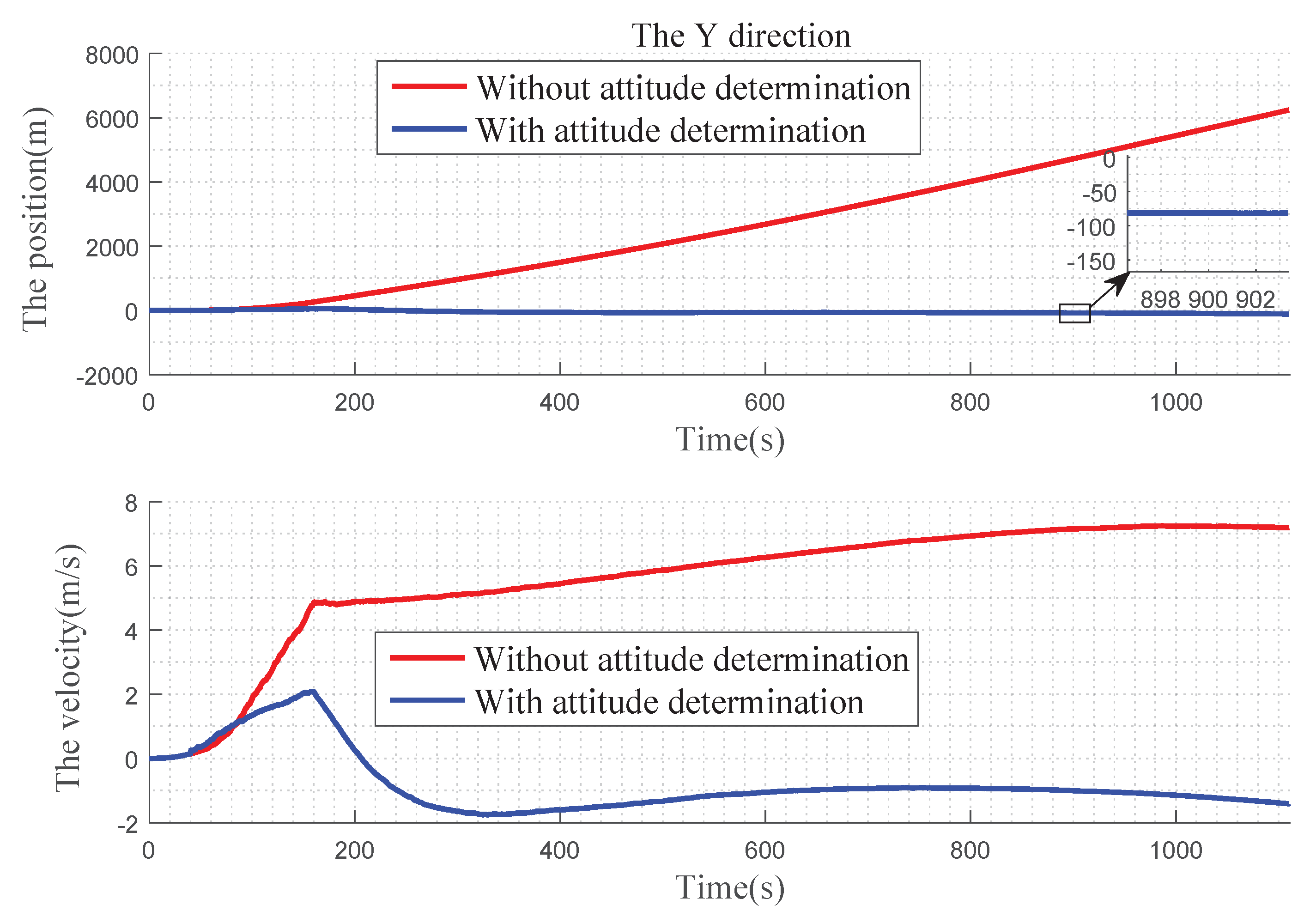
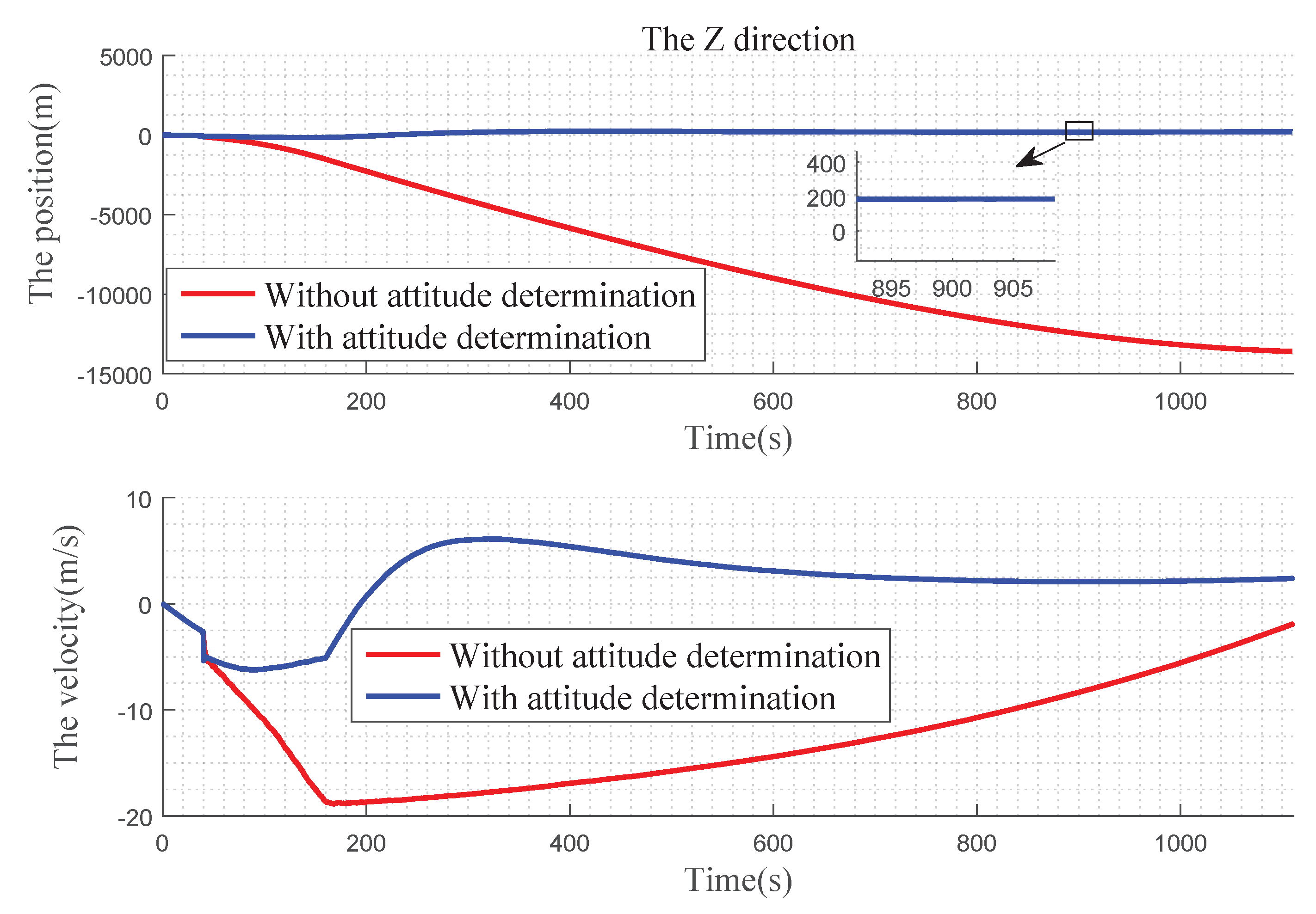
5. Simulation and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SINS | strapdown inertial navigation system |
| CNS | celestial navigation system |
| UAV | unmanned aerial vehicle |
| GPS | global position system |
| SIFT | Scale-Invariant feature transform |
| KD | k-dimensional |
| ED | eigenvalue decomposition |
| MSE | mean square error |
References
- Ning, X.; Zhang, J.; Gui, M.; Fang, J. A Fast Calibration Method of the Star Sensor Installation Error Based on Observability Analysis for the Tightly Coupled SINS/CNS-Integrated Navigation System. IEEE Sens. J. 2018, 18, 6794–6803. [Google Scholar] [CrossRef]
- Ning, X.; Liu, L. A two-mode INS/CNS navigation method for lunar rovers. IEEE Trans. Instrum. Meas. 2014, 63, 2170–2179. [Google Scholar] [CrossRef]
- Han, J.; Changhong, W.; Li, B. Novel all-time initial alignment method for INS/CNS integrated navigation system. In Proceedings of the IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1766–1770. [Google Scholar]
- Lijun, S.; Wanliang, Z.; Yuxiang, C.; Xiaozhen, C. Based on Grid Reference Frame for SINS/CNS Integrated Navigation System in the Polar Regions. Complexity 2019, 2019, 1–8. [Google Scholar] [CrossRef]
- Pimenta, F. Astronomy and navigation. In Handbook of Archaeoastronomy and Ethnoastronomy; Ruggles, C.L., Ed.; Springer: New York, NY, USA, 2015; pp. 43–65. [Google Scholar]
- Katz-Bassett, E.; Sherry, J.; Huang, T.Y.; Kazandjieva, M.; Partridge, C.; Dogar, F. Helping conference attendees better understand research presentations. Commun. ACM 2016, 59, 32–34. [Google Scholar] [CrossRef]
- Wang, Q.; Li, Y.; Ming, D.; Wei, G.; Zhao, Q. Performance enhancement of INS/CNS integration navigation system based on particle swarm optimization back propagation neural network. Ocean Eng. 2015, 108, 33–45. [Google Scholar] [CrossRef]
- Delaune, J.; Besnerais, G.L.; Voirin, T.; Farges, J.L.; Bourdarias, C. Visual–inertial navigation for pinpoint planetary landing using scale-based landmark matching. Robot. Autom. Syst. 2016, 78, 63–82. [Google Scholar] [CrossRef]
- Gupta, S.; Fouhey, D.; Levine, S.; Malik, J. Unifying map and landmark based representations for visual navigation. arXiv 2017, arXiv:1712.08125. [Google Scholar]
- Costello, M.J.; Castro, R. Precision Landmark-Aided Navigation. US Patent 7,191,056, 13 March 2007. [Google Scholar]
- Cesetti, A.; Frontoni, E.; Mancini, A.; Zingaretti, P.; Longhi, S. A Vision-Based Guidance System for UAV Navigation and Safe Landing using Natural Landmarks. J. Intell. Robot. Syst. 2010, 57, 233. [Google Scholar] [CrossRef]
- He, Y.; Li, S.; Guo, Q. Landmark based position and orientation method with tilt compensation for missile launcher. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 5585–5589. [Google Scholar]
- Khuller, S.; Raghavachari, B.; Rosenfeld, A. Landmarks in graphs. Discrete Appl. Math. 1996, 70, 217–229. [Google Scholar] [CrossRef]
- Kim, Y.; Hwang, D.H. Vision/INS integrated navigation system for poor vision navigation environments. Sensors 2016, 16, 1672. [Google Scholar] [CrossRef] [PubMed]
- Babel, L. Flight path planning for unmanned aerial vehicles with landmark-based visual navigation. Robot. Autom. Syst. 2014, 62, 142–150. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Cai, T.T.; Wang, L. Orthogonal Matching Pursuit for Sparse Signal Recovery With Noise. IEEE Trans. Inf. Theory 2011, 57, 4680–4688. [Google Scholar] [CrossRef]
- Carmi, A.; Gurfil, P.; Kanevsky, D. Methods for Sparse Signal Recovery Using Kalman Filtering With Embedded Pseudo-Measurement Norms and Quasi-Norms. IEEE Trans. Signal Process. 2010, 58, 2405–2409. [Google Scholar] [CrossRef]
- Cheung, W.; Hamarneh, G. n-SIFT: n-Dimensional Scale Invariant Feature Transform. IEEE Trans. Image Process. 2009, 18, 2012–2021. [Google Scholar] [CrossRef] [PubMed]
- Cruz-Mota, J. Scale Invariant Feature Transform on the Sphere: Theory and Applications. Int. J. Comput. Vision 2012, 98, 217–241. [Google Scholar] [CrossRef]
- Smirnov, F.; Zamolodchikov, A. On space of integrable quantum field theories. Nucl. Phys. B 2017, 915, 363–383. [Google Scholar] [CrossRef]
- Lan, Z.; Lin, M.; Li, X.; Hauptmann, A.G.; Raj, B. Beyond gaussian pyramid: Multi-skip feature stacking for action recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 8–10 June 2015; pp. 204–212. [Google Scholar]
- Li, M.; Wang, L.; Hao, Y. Image matching based on SIFT features and kd-tree. In Proceedings of the 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010; pp. 218–222. [Google Scholar]
- Gorbenko, A.; Popov, V. The problem of selection of a minimal set of visual landmarks. Appl. Math. Sci. 2012, 6, 4729–4732. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3 | 4 | 5 | 6 | 7 | ||
|---|---|---|---|---|---|---|
| Non-correlation | Pitch angle error | 3.4146 | 2.0300 | 2.3630 | 1.6049 | 1.8437 |
| Yaw angle error | 4.5328 | 1.4792 | 1.9401 | 1.8308 | 0.6509 | |
| Roll angle error | 1.5083 | 2.2644 | 0.8618 | 0.7915 | 0.2807″ | |
| Strong correlation | Pitch angle error | 28.4667″ | 24.9020 | 13.8017 | 11.8040 | 3.3160 |
| Yaw angle error | 7.9635 | 2.8863 | 4.4863 | 4.6482 | 4.0131 | |
| Roll angle error | 3.1885 | 5.7244 | 3.5935 | 2.2859 | 2.3123 | |
| X | Y | Z | ||
|---|---|---|---|---|
| With attitude determination | The average error | 25.6573 | 60.1919 | 175.0093 |
| The maximum error | 40.5812 | 116.1984 | 240.7109 | |
| Without attitude determination | The average error | 1004.2 | 2606.1 | 7664.0 |
| The maximum error | 1601.2 | 6251.0 | 13615 | |
| With attitude determination | The average error | 0.5100 | 1.1333 | 3.4702 |
| The maximum error | 1.2567 | 2.0557 | 6.2684 | |
| Without attitude determination | The average error | 1.6633 | 5.5829 | 12.1824 |
| The maximum error | 3.1103 | 7.2776 | 19.0498 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Zhou, H.; Wang, J.; He, Z.; Wang, D. SINS/Landmark Integrated Navigation Based on Landmark Attitude Determination. Sensors 2019, 19, 2917. https://doi.org/10.3390/s19132917
Xu S, Zhou H, Wang J, He Z, Wang D. SINS/Landmark Integrated Navigation Based on Landmark Attitude Determination. Sensors. 2019; 19(13):2917. https://doi.org/10.3390/s19132917
Chicago/Turabian StyleXu, Shuqing, Haiyin Zhou, Jiongqi Wang, Zhangming He, and Dayi Wang. 2019. "SINS/Landmark Integrated Navigation Based on Landmark Attitude Determination" Sensors 19, no. 13: 2917. https://doi.org/10.3390/s19132917
APA StyleXu, S., Zhou, H., Wang, J., He, Z., & Wang, D. (2019). SINS/Landmark Integrated Navigation Based on Landmark Attitude Determination. Sensors, 19(13), 2917. https://doi.org/10.3390/s19132917