IPSCL: An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks



Abstract
1. Introduction
2. Related Work
3. Indoor Positioning with Sensors and Crowdsourced Landmarks (IPSCL) System Design
3.1. Offline Anchor Points and Predefined Landmarks Setup Phase
3.2. Localization Phase
3.2.1. Built-In Sensor-Based Localization
3.2.2. Predefined and Crowdsourced Landmark-Based Correction
| Algorithm 1. Pseudo code of the landmark algorithm. |
| // Positioning |
| if(){ |
| if |
| set_AllLandmark_IsDetected(false) // Refresh used landmarks |
| () = (, ) |
| = true // Prevent continuous capture } |
| if |
| // Use for setting transfer priority |
| // Insert |
| if{ |
| = () |
| addAToB( |
| sendToServer() } |
| // Reset |
| if(periodIsCome){ |
| for n=1 to all_ |
| = 0 // Identify useless landmarks used a lot in past } |
4. Experiment
4.1. Experimental Setup
4.2. Experimental Results
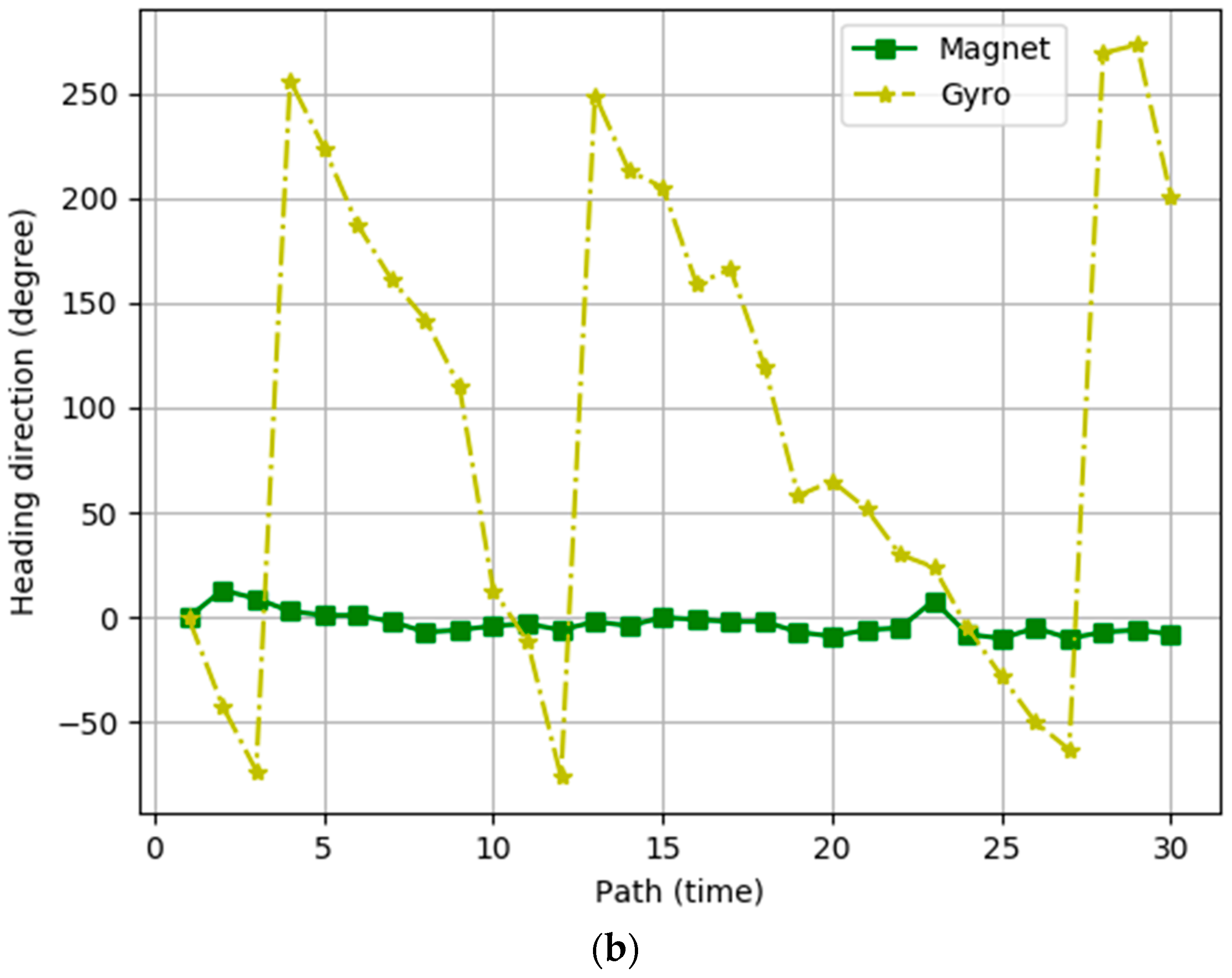
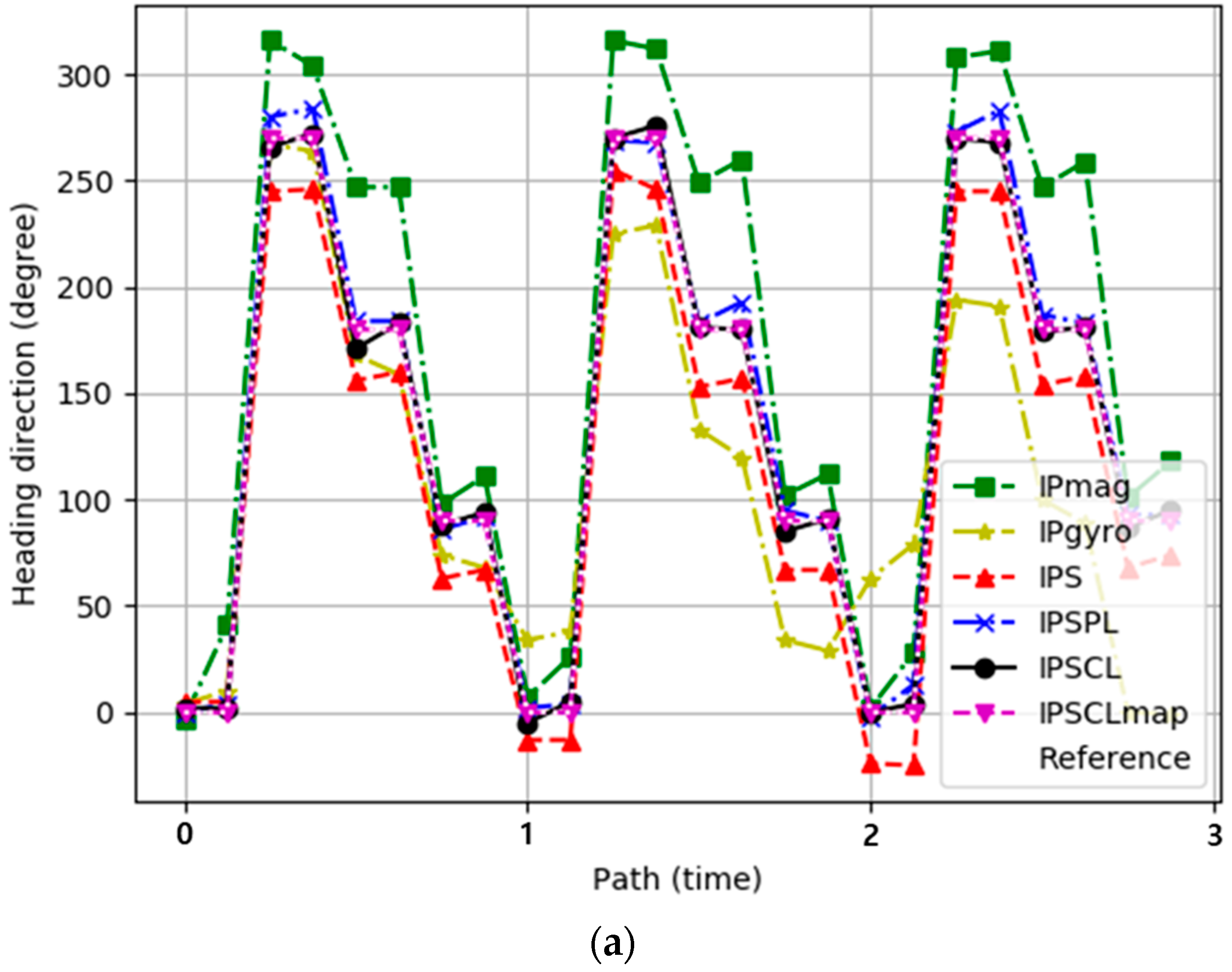
4.2.1. Heading Direction Error
4.2.2. Distance Error
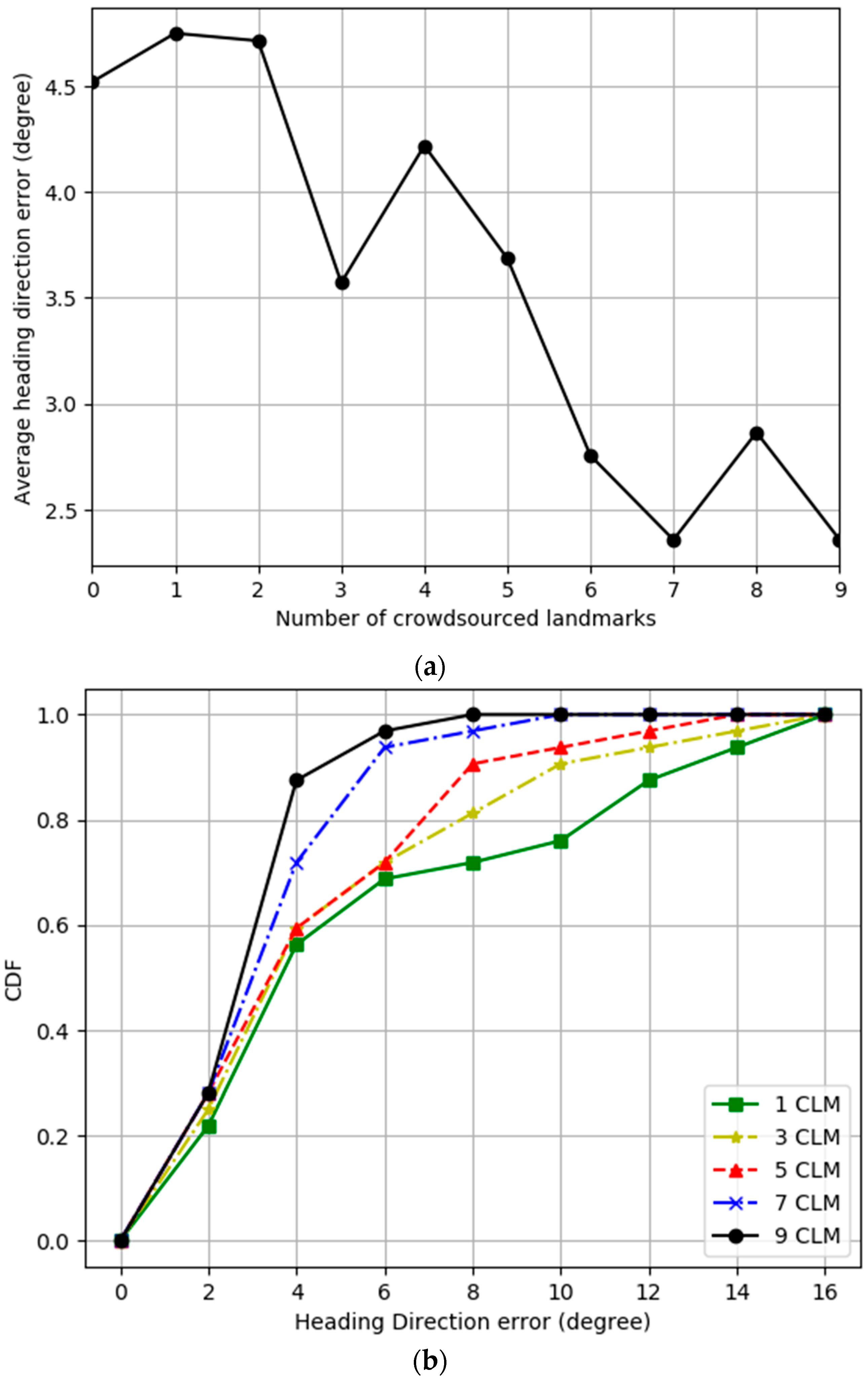
4.2.3. Crowdsourced Landmark
4.2.4. Localization Trajectories
5. Conclusions
6. Future Works
Author Contributions
Funding
Acknowledgements
Conflicts of Interest
References
- Available online: https://www.buildinggreen.com/blog/we-spend-90-our-time-indoors-says-who (accessed on 23 May 2019).
- Shayeganfar, F.; Anjomshoaa, A.; Tjoa, A.M. A smart indoor navigation solution based on building information model and google android. In Proceedings of the International Conference on Computers for Handicapped Persons, Linz, Austria, 9–11 July 2008; pp. 1050–1056. [Google Scholar]
- Macagnano, D.; Destino, G.; Abreu, G. Indoor positioning: A key enabling technology for IoT applications. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 117–118. [Google Scholar]
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006. [Google Scholar]
- Brown, A.K.; Sturza, M.A. Vehicle Tracking System Employing Global Positioning System (gps) satellites. U.S. Patent 5,225,842, 6 July 1993. [Google Scholar]
- Martin, E.; Vinyals, O.; Friedland, G.; Bajcsy, R. Precise Indoor Localization Using Smart Phones. In Proceedings of the 18th ACM International Conference on Multimedia, Firenze, Italy, 25–29 October 2010; ACM: New York, NY, USA, 2010; pp. 787–790. [Google Scholar]
- Djuknic, G.M.; Richton, R.E. Geolocation and assisted GPS. Computer 2001, 34, 123–125. [Google Scholar] [CrossRef]
- Husen, M.N.; Lee, S. Indoor human localization with orientation using WiFi fingerprinting. In Proceedings of the 8th International Conference on Ubiquitous Information Management and Communication, Siem Reap, Cambodia, 9–11 January 2014; p. 109. [Google Scholar]
- Mok, E.; Retscher, G. Location determination using WiFi fingerprinting versus WiFi trilateration. J. Locat. Based Serv. 2007, 1, 145–159. [Google Scholar] [CrossRef]
- Choi, M.S.; Jang, B. An Accurate Fingerprinting based Indoor Positioning Algorithm. Int. J. Appl. Eng. Res. 2017, 12, 86–90. [Google Scholar]
- Jang, B.; Sichitiu, M.L. IEEE 802.11 Saturation Throughput Analysis in the Presence of Hidden Terminals. IEEE/ACM Trans. Netw. 2012, 20, 557–570. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H. Indoor Positioning Technologies Without Offline Fingerprinting Map: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 508–525. [Google Scholar] [CrossRef]
- Mylonas, A.; Meletiadis, V.; Mitrou, L.; Gritzalis, D. Smartphone sensor data as digital evidence. Comput. Secur. 2013, 38, 51–75. [Google Scholar] [CrossRef]
- Yi, W.; Jia, W.; Saniie, J. Mobile sensor data collector using Android smartphone. In Proceedings of the 2012 IEEE 55th International Midwest Symposium on Circuits and Systems (MWSCAS), Boise, ID, USA, 5–8 August 2012; pp. 956–959. [Google Scholar]
- Widhalm, P.; Nitsche, P.; Brändie, N. Transport mode detection with realistic Smartphone sensor data. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012), Tsukuba, Japan, 11–25 November 2012; pp. 573–576. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X. Activity sequence-based indoor pedestrian localization using smartphones. IEEE Trans. Hum. Mach. Syst. 2015, 45, 562–574. [Google Scholar] [CrossRef]
- Lemasurier, G.C.; Lee, S.M.; Tudor-Locke, C. Motion sensor accuracy under controlled and free-living conditions. Med. Sci. Sports Exerc. 2004, 36, 905–910. [Google Scholar] [CrossRef]
- Chen, Y.; Francisco, J.A.; Trappe, W.; Martin, R.P. A practical approach to landmark deployment for indoor localization. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; Volume 1, pp. 365–373. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X.; Chen, L. ALIMC: Activity landmark-based indoor mapping via crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2774–2785. [Google Scholar] [CrossRef]
- Gandhewar, N.; Sheikh, R. Google Android: An emerging software platform for mobile devices. Int. J. Comput. Sci. Eng. 2010, 1, 12–17. [Google Scholar]
- Macario, G.; Torchiano, M.; Violante, M. An in-vehicle infotainment software architecture based on google android. In Proceedings of the 2009 IEEE International Symposium on Industrial Embedded Systems, Lausanne, Switzerland, 8–10 July 2009; pp. 257–260. [Google Scholar]
- Zhou, B.; Elbadry, M.; Gao, R.; Ye, F. BatTracker: High precision infrastructure-free mobile device tracking in indoor environments. In Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, Delft, The Netherlands, 6–8 November 2017; p. 13. [Google Scholar]
- Shang, J.; Gu, F.; Hu, X.; Kealy, A. Apfiloc: An infrastructure-free indoor localization method fusing smartphone inertial sensors, landmarks and map information. Sensors 2015, 15, 27251–27272. [Google Scholar] [CrossRef] [PubMed]
- Suykens, J.A.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Suykens, J.A.; De Brabanter, J.; Lukas, L.; Vandewalle, J. Weighted least squares support vector machines: Robustness and sparse approximation. Neurocomputing 2002, 48, 85–105. [Google Scholar] [CrossRef]
- Shen, C.; Brooks, M.J.; Van Den Hengel, A. Augmented particle filtering for efficient visual tracking. In Proceedings of the IEEE International Conference on Image Processing, Genova, Italy, 14 September 2005; Volume 3, p. III-856. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Liu, S.; He, T. SmartLight: Light-weight 3D indoor localization using a single LED lamp. In Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, Delft, The Netherlands, 6–8 November 2017; p. 11. [Google Scholar]
- Karlsson, N.; Di Bernardo, E.; Ostrowski, J.; Goncalves, L.; Pirjanian, P.; Munich, M.E. The vSLAM algorithm for robust localization and mapping. In Proceedings of the ICRA, Barcelona, Spain, 18–22 April 2005; pp. 24–29. [Google Scholar]
- Zhang, C.; Subbu, K.P.; Luo, J.; Wu, J. GROPING: Geomagnetism and crowdsensing powered indoor navigation. IEEE Trans. Mob. Comput. 2015, 14, 387–400. [Google Scholar] [CrossRef]
- Noto, M.; Sato, H. A method for the shortest path search by extended Dijkstra algorithm. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics ‘Cybernetics Evolving to Systems, Humans, Organizations, and Their Complex Interactions’, Nashville, TN, USA, 8–11 October 2000; Volume 3, pp. 2316–2320. [Google Scholar]
- Baggio, A.; Langendoen, K. Monte Carlo localization for mobile wireless sensor networks. Ad Hoc Netw. 2008, 6, 718–733. [Google Scholar] [CrossRef]
- Bruno, L.; Robertson, P. Wislam: Improving footslam with wifi. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–10. [Google Scholar]
- Robertson, P.; Bruno, L. Method for Localisation and Mapping of Pedestrians or Robots Using Wireless Access Points. U.S. Patent 14/345,284, 29 January 2015. [Google Scholar]
- Angermann, M.; Robertson, P. FootSLAM: Pedestrian simultaneous localization and mapping without exteroceptive sensors—Hitchhiking on human perception and cognition. Proc. IEEE 2012, 100, 1840–1848. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Mohamed, R.; Elgohary, A.; Alzantot, M.F.; Wang, H.; Sen, S.; Choudhury, R.R.; Youssef, M. SemanticSLAM: Using environment landmarks for unsupervised indoor localization. IEEE Trans. Mob. Comput. 2016, 15, 1770–1782. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W. A robust crowdsourcing-based indoor localization system. Sensors 2017, 17, 864. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, D.R.; Yang, S.H.; Son, Y.H.; Han, S.K. An indoor visible light communication positioning system using a RF carrier allocation technique. J. Lightw. Technol. 2013, 31, 134–144. [Google Scholar] [CrossRef]
- Shu, Y.; Coué, P.; Huang, Y.; Zhang, J.; Cheng, P.; Chen, J. G-Loc: Indoor localization leveraging gradient-based fingerprint map. In Proceedings of the 2014 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS, Toronto, ON, Canada, 27 April–2 May 2014; pp. 129–130. [Google Scholar]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-based fingerprinting for indoor localization and tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Chen, Z.; Jiang, H.; Xie, L.; Spanos, C. Accurate indoor localization and tracking using mobile phone inertial sensors, WiFi and iBeacon. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 27–30 March 2017; pp. 1–4. [Google Scholar]
- Chawathe, S.S. Low-latency indoor localization using bluetooth beacons. In Proceedings of the 2009 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–7. [Google Scholar]
- Mendelson, E. Indoor and Outdoor Mapping and Navigation Utilizing RF Bluetooth Beacons. U.S. Patent 9204257B1, 1 December 2015. [Google Scholar]
- Shin, B.; Lee, J.H.; Lee, T.; Kim, H.S. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 8th International Conference on Computing Technology and Information Management (NCM and ICNIT), Seoul, Korea, 24–26 April 2012; Volume 2, pp. 574–577. [Google Scholar]
- Machaj, J.; Brida, P.; Piche, R. Rank based fingerprinting algorithm for indoor positioning. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–6. [Google Scholar]
- Kwoh, Y.S.; Hou, J.; Jonckheere, E.A.; Hayati, S. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery. IEEE Trans. Biomed. Eng. 1988, 35, 153–160. [Google Scholar] [CrossRef]
- Yoshino, M.; Haruyama, S.; Nakagawa, M. High-accuracy positioning system using visible LED lights and image sensor. In Proceedings of the 2008 IEEE Radio and Wireless Symposium, Orlando, FL, USA, 22–24 January 2008; pp. 439–442. [Google Scholar]
- Bishop, G.; Welch, G. An introduction to the kalman filter. Proc. SIGGRAPH Course 2001, 8, 41. [Google Scholar]
- Güvenc, İ. Enhancements to RSS based indoor tracking systems using Kalman filters. Ph.D. Thesis, University of New Mexico, Albuquerque, New Mexico, 2003. [Google Scholar]
- Shen, G.; Chen, Z.; Zhang, P.; Moscibroda, T.; Zhang, Y. Walkie-Markie: Indoor pathway mapping made easy. In Proceedings of the 10th {USENIX} Symposium on Networked Systems Design and Implementation ({NSDI} 13), Lombard, IL, USA, 2–5 April 2013; pp. 85–98. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IPmag | IPgyro | IPS | IPSPL | IPSCL | IPSCLmap | |
|---|---|---|---|---|---|---|
| Maximum | 83° | 335° | 35° | 27° | 23° | 160° |
| Minimum | 1° | 3° | 1° | 1° | 0° | 0° |
| Average | 38.76875° | 127.8313° | 11.10625° | 5.56875 | 5.1625 | 4.2375 |
| IPmag | IPgyro | IPS | IPSPL | IPSCL | IPSCLmap | |
|---|---|---|---|---|---|---|
| Maximum | 450.3055 m | 127.753 m | 58.12365 m | 37.86159 m | 33.21654 m | 10.2354 m |
| Minimum | 45.71716 m | 2.330403 m | 3.889214 m | 0.649444 m | 0.299748 m | 0.120128 m |
| Average | 224.1201 m | 38.24919 m | 29.12765 m | 13.21881 m | 10.95822 m | 3.74123 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, B.; Kim, H.; Kim, J.W. IPSCL: An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks. Sensors 2019, 19, 2891. https://doi.org/10.3390/s19132891
Jang B, Kim H, Kim JW. IPSCL: An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks. Sensors. 2019; 19(13):2891. https://doi.org/10.3390/s19132891
Chicago/Turabian StyleJang, Beakcheol, Hyunjung Kim, and Jong Wook Kim. 2019. "IPSCL: An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks" Sensors 19, no. 13: 2891. https://doi.org/10.3390/s19132891
APA StyleJang, B., Kim, H., & Kim, J. W. (2019). IPSCL: An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks. Sensors, 19(13), 2891. https://doi.org/10.3390/s19132891