Game-Calibrated and User-Tailored Remote Detection of Stress and Boredom in Games


Abstract
1. Introduction
2. Remote Detection of Stress and Boredom
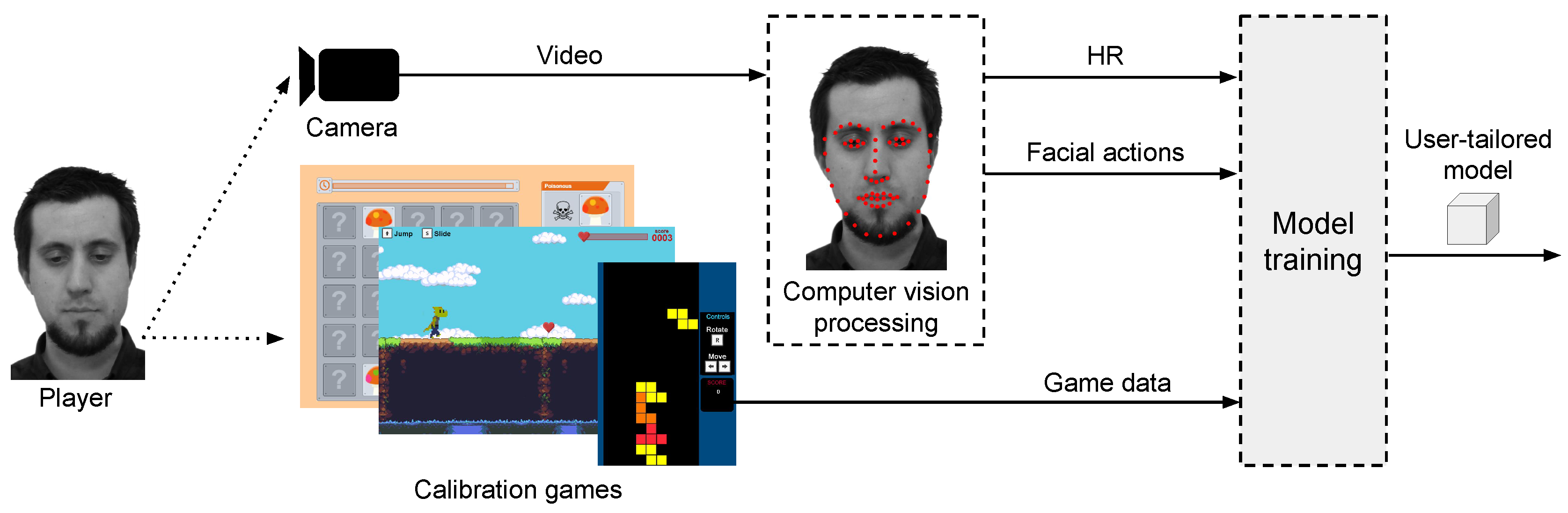
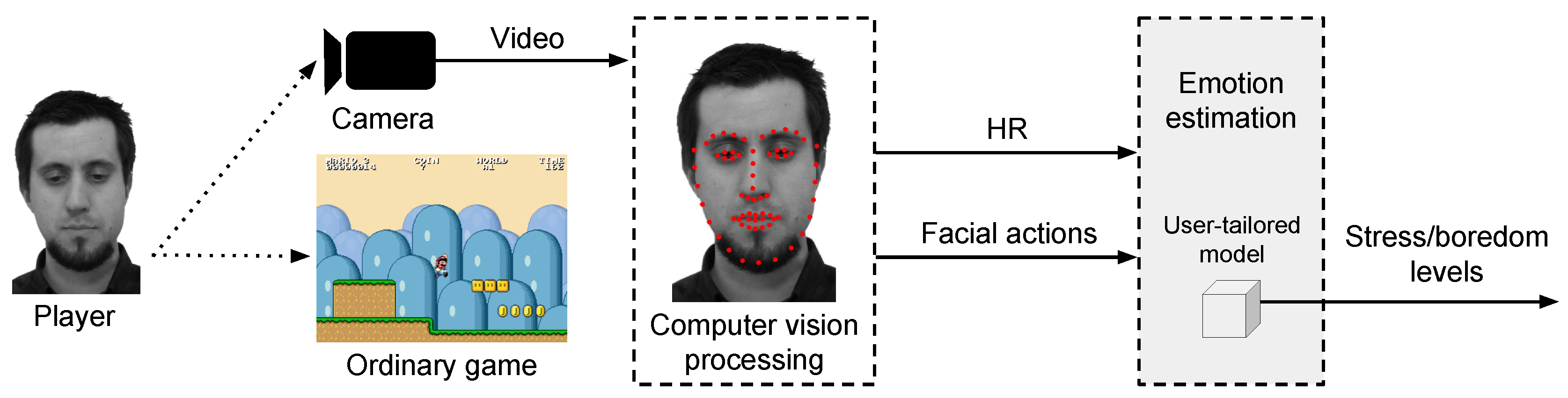
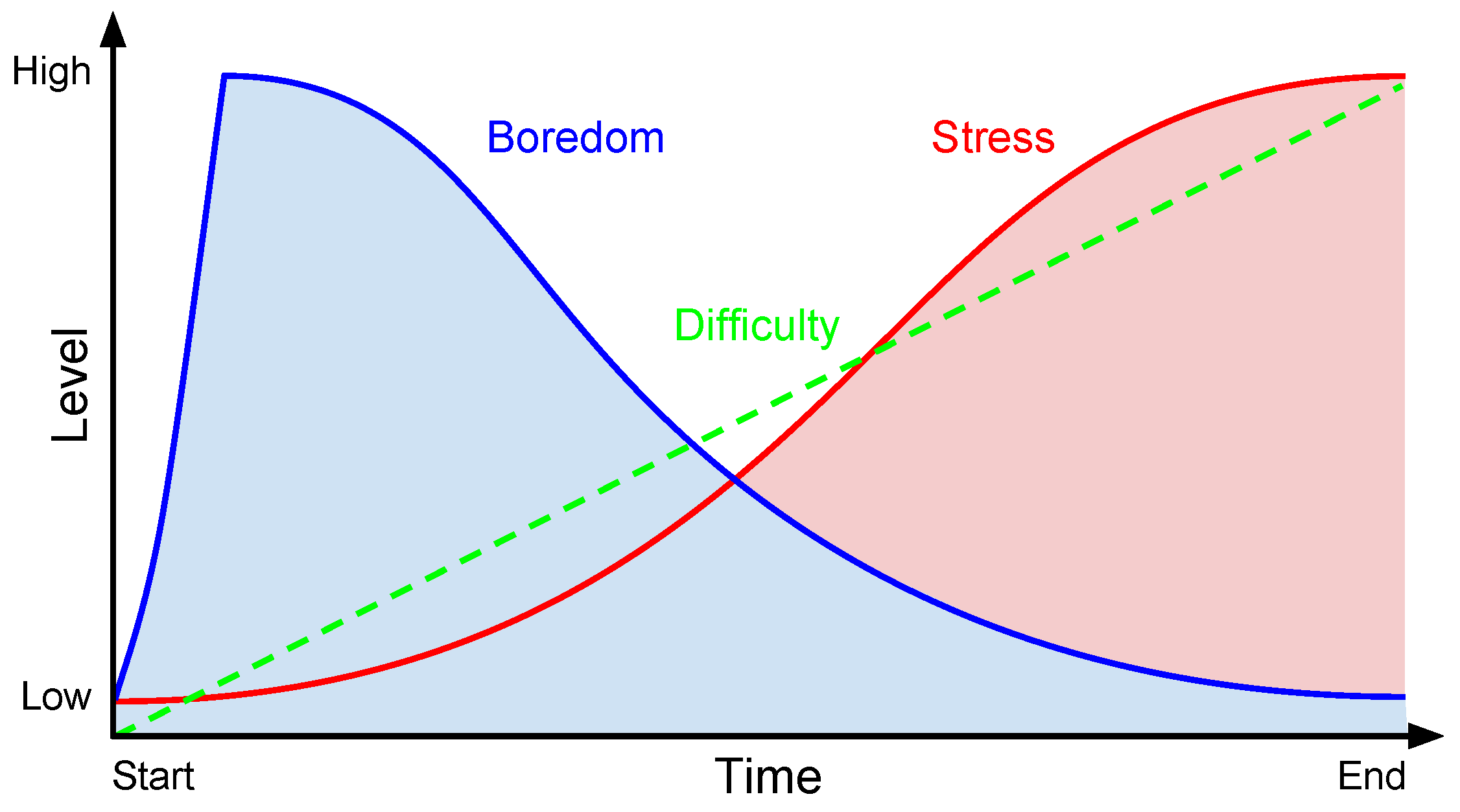
2.1. Game-Based Emotion Elicitation
2.2. Remote Extraction of User Signals and Classification Features
3. Background and Related Work
3.1. Extraction and Selection of Psychophysiological Signals
3.1.1. Physical Readings of Signals
3.1.2. Remote Readings of Signals
3.2. Emotion Classification
3.2.1. Approaches Based on Physical Contact and Sensors
3.2.2. Approaches based on Remote, Non-Contact Analysis
4. Experimental Setup
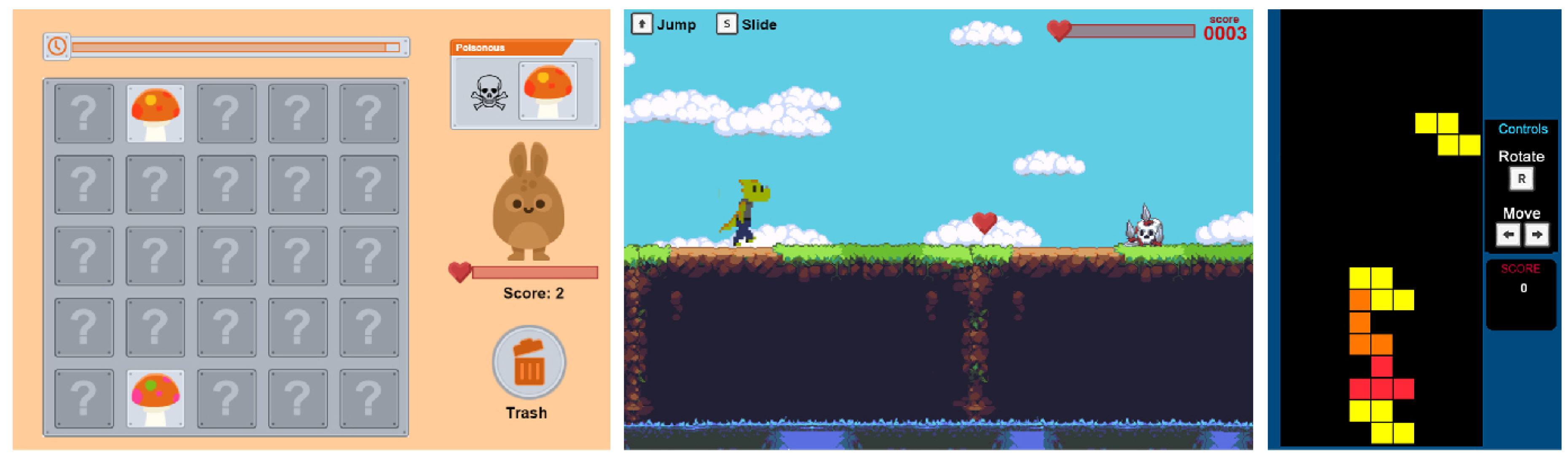
4.1. Calibration Games
4.2. Equipment and Data Collection
4.3. Participants
4.4. Configuration of Study 1
Materials and Procedures
4.5. Configuration of Study 2
4.5.1. Materials and Procedures
4.5.2. Evaluation Game: Infinite Mario
5. Analysis and Procedures
5.1. Study 1
5.1.1. Data Pre-Processing
5.1.2. Features Extraction and Calculation
5.1.3. Training and Evaluation of an Emotion Classifier
5.1.4. Analysis
- : a user-tailored neural network using a multifactorial feature set, i.e., facial and HR features, performs with greater accuracy than a user-tailored neural network using facial features only;
- : a user-tailored neural network using a multifactorial feature set, i.e., facial and HR features, performs with greater accuracy than a user-tailored neural network using HR features only.
5.2. Study 2
5.2.1. Data Preprocessing
5.2.2. Features Extraction
5.2.3. Training of the Emotion Classifier
5.2.4. Construction of a Testing Dataset
5.2.5. Evaluation of the Emotion Classifier
5.2.6. Analysis
- : a user-tailored model, i.e., neural network, trained on data samples from three calibration games of a given subject , i.e., Mushroom, Platformer and Tetris, is able to classify the emotional state of samples extracted from an evaluation game, i.e., Infinite Mario, played by that same subject with a mean accuracy greater than the chance-level rate.
6. Results
6.1. Study 1
6.2. Study 2
6.2.1. Self-reported emotional state
6.2.2. Emotion Classification
7. Discussion
7.1. Study 1
7.2. Study 2
8. Limitations, Critique and Ethical Considerations
8.1. Limitations of Our Approach
8.2. Ethical Considerations
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANS | Autonomic Nervous System |
| AUC | Area Under the Curve |
| BSS | Blind Source Separation |
| BVP | Blood Volume Pulse |
| CLNF | Constrained Local Neural Fields |
| CMA | Circumplex Model of Affect |
| COTS | Commercial Off-the-shelf |
| DSR | Design Science Research |
| ECG | Electrocardiogram |
| EEG | Electroencephalogram |
| EMG | Electromyography |
| FA | Facial Actions |
| FACS | Facial Action Coding System |
| FPS | Frames Per Second |
| HCI | Human–Computer Interaction |
| HR | Heart Rate |
| HRV | Hear Rate Variability |
| ICA | Independent Component Analysis |
| LOOCV | Leave-One-Out Cross-Validation |
| LOSOCV | Leave-One-Session-Out Cross-Validation |
| PNS | Parasympathetic Nervous System |
| RGB | Red Green Blue |
| ROI | Region of Interest |
| rPPG | Remote Photoplethysmography |
| RR | Respiratory Rate |
| SNS | Sympathetic Nervous System |
| SVM | Support Vector Machine |
References
- Picard, R.W. Affective Computing; MIT Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Mekler, E.D.; Bopp, J.A.; Tuch, A.N.; Opwis, K. A systematic review of quantitative studies on the enjoyment of digital entertainment games. In Proceedings of the 32nd annual ACM conference on Human factors in computing systems—CHI‘14, Toronto, ON, Canada, 26 Apri–1 May 2014; Association for Computing Machinery (ACM): New York, NY, USA, 2014; pp. 927–936. [Google Scholar] [CrossRef]
- Bousefsaf, F.; Maaoui, C.; Pruski, A. Remote assessment of the Heart Rate Variability to detect mental stress. In Proceedings of the 2013 7th International Conference on Pervasive Computing Technologies for Healthcare and Workshops, Venice, Italy, 5–8 May 2013; pp. 348–351. [Google Scholar] [CrossRef][Green Version]
- Yun, C.; Shastri, D.; Pavlidis, I.; Deng, Z. O’game, can you feel my frustration? In Proceedings of the 27th International Conference on Human Factors in Computing Systems—CHI 09, Boston, MA, USA, 4–9 April 2009; Association for Computing Machinery (ACM): New York, NY, USA, 2009; pp. 2195–2204. [Google Scholar] [CrossRef]
- Rani, P.; Liu, C.; Sarkar, N.; Vanman, E. An empirical study of machine learning techniques for affect recognition in human–robot interaction. Pattern Anal. Appl. 2006, 9, 58–69. [Google Scholar] [CrossRef]
- Tijs, T.J.W.; Brokken, D.; IJsselsteijn, W.A. Dynamic Game Balancing by Recognizing Affect. In Fun and Games; Springer Nature: Basingstoke, UK, 2008; pp. 88–93. [Google Scholar]
- Kukolja, D.; Popović, S.; Horvat, M.; Kovač, B.; Ćosić, K. Comparative analysis of emotion estimation methods based on physiological measurements for real-time applications. Int. J. Hum. Comput. Stud. 2014, 72, 717–727. [Google Scholar] [CrossRef]
- Zacharatos, H.; Gatzoulis, C.; Chrysanthou, Y.L. Automatic emotion recognition based on body movement analysis: A survey. IEEE Comput. Graph. Appl. 2014, 34, 35–45. [Google Scholar] [CrossRef]
- Yamakoshi, T.; Yamakoshi, K.; Tanaka, S.; Nogawa, M.; Shibata, M.; Sawada, Y.; Rolfe, P.; Hirose, Y. A Preliminary Study on Driver’s Stress Index Using a New Method Based on Differential Skin Temperature Measurement. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2007; pp. 722–725. [Google Scholar] [CrossRef]
- Yamaguchi, M.; Wakasugi, J.; Sakakima, J. Evaluation of driver stress using biomarker in motor-vehicle driving simulator. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2006; pp. 1834–1837. [Google Scholar] [CrossRef]
- Healey, J.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef]
- Cohn, J.F.; De la Torre, F. Automated face analysis for affective. In The Oxford Handbook of Affective Computing; Oxford University Press: Oxford, UK, 2014; p. 131. [Google Scholar]
- Tan, C.T.; Rosser, D.; Bakkes, S.; Pisan, Y. A feasibility study in using facial expressions analysis to evaluate player experiences. In Proceedings of the 8th Australasian Conference on Interactive Entertainment: Playing the System, Auckland, New Zealand, 21–22 July 2012; ACM: New York, NY, USA, 2012; p. 5. [Google Scholar] [CrossRef]
- Tan, C.T.; Bakkes, S.; Pisan, Y. Inferring Player Experiences Using Facial Expressions Analysis. In Proceedings of the 2014 Conference on Interactive Entertainment—IE2014, Newcastle, NSW, Australia, 2–3 December 2014; ACM Press: Boston, MA, USA, 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Tan, C.T.; Bakkes, S.; Pisan, Y. Correlation between Facial Expressions and the Game Experience Questionnaire. In Proceedings of the Entertainment Computing-ICEC 2014: 13th International Conference, ICEC 2014, Sydney, Australia, 1–3 October 2014; Springer: Berlin, Germany, 2014; Volume 8770, p. 229. [Google Scholar]
- Zhou, X.; Huang, X.; Wang, Y. Real-time facial expression recognition in the interactive game based on embedded hidden markov model. In Proceedings of the International Conference on Computer Graphics, Imaging and Visualization, 2004 (CGIV 2004), Penang, Malaysia, 2 July 2004; IEEE: Piscataway Township, NJ, USA, 2004; pp. 144–148. [Google Scholar]
- Zhan, C.; Li, W.; Ogunbona, P.; Safaei, F. A Real-Time Facial Expression Recognition System for Online Games. Int. J. Comput. Games Technol. 2008, 2008, 10. [Google Scholar] [CrossRef]
- Rouast, P.V.; Adam, M.T.; Chiong, R.; Cornforth, D.; Lux, E. Remote heart rate measurement using low-cost RGB face video: A technical literature review. Front. Comput. Sci. 2016. [Google Scholar] [CrossRef]
- Appelhans, B.M.; Luecken, L.J. Heart rate variability as an index of regulated emotional responding. Rev. Gen. Psychol. 2006, 10, 229. [Google Scholar] [CrossRef]
- Fenton-O’Creevy, M.; Lins, J.T.; Vohra, S.; Richards, D.W.; Davies, G.; Schaaff, K. Emotion regulation and trader expertise: Heart rate variability on the trading floor. J. Neurosci. Psychol. Econ. 2012, 5, 227. [Google Scholar] [CrossRef]
- Schubert, C.; Lambertz, M.; Nelesen, R.; Bardwell, W.; Choi, J.B.; Dimsdale, J. Effects of stress on heart rate complexity—a comparison between short-term and chronic stress. Biol. Psychol. 2009, 80, 325–332. [Google Scholar] [CrossRef]
- Landowska, A. Emotion Monitoring Verification of Physiological Characteristics Measurement Procedures. Metrol. Meas. Syst. 2014, 21, 719–732. [Google Scholar] [CrossRef]
- Bevilacqua, F.; Engström, H.; Backlund, P. Accuracy Evaluation of Remote Photoplethysmography Estimations of Heart Rate in Gaming Sessions with Natural Behavior. In Advances in Computer Entertainment Technology; Cheok, A.D., Inami, M., Romão, T., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 508–530. [Google Scholar] [CrossRef]
- McDuff, D.J.; Hernandez, J.; Gontarek, S.; Picard, R.W. COGCAM: Contact-free Measurement of Cognitive Stress During Computer Tasks with a Digital Camera. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems—CHI’16, San Jose, CA, USA, 7–12 May 2016; Association for Computing Machinery (ACM): New York, NY, USA, 2016; pp. 4000–4004. [Google Scholar] [CrossRef]
- McDuff, D.J.; Gontarek, S.; Picard, R.W. Improvements in Remote Cardiopulmonary Measurement Using a Five Band Digital Camera. IEEE Trans. Biomed. Eng. 2014, 61, 2593–2601. [Google Scholar] [CrossRef] [PubMed]
- Jerritta, S.; Murugappan, M.; Nagarajan, R.; Wan, K. Physiological signals based human emotion Recognition: A review. In Proceedings of the 2011 IEEE 7th International Colloquium on Signal Processing and its Applications, Penang, Malaysia, 4–6 March 2011; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2011; pp. 410–415. [Google Scholar] [CrossRef]
- Mandryk, R.L.; Atkins, M.S.; Inkpen, K.M. A continuous and objective evaluation of emotional experience with interactive play environments. In Proceedings of the SIGCHI conference on Human Factors in computing systems, Montréal, QC, Canada, 22–27 April 2006; ACM: New York, NY, USA, 2006; pp. 1027–1036. [Google Scholar]
- Goldberg, L.R. The structure of phenotypic personality traits. Am. Psychol. 1993, 48, 26. [Google Scholar] [CrossRef] [PubMed]
- Ravaja, N. Effects of a small talking facial image on autonomic activity: The moderating influence of dispositional BIS and BAS sensitivities and emotions. Biol. Psychol. 2004, 65, 163–183. [Google Scholar] [CrossRef]
- Bailenson, J.N.; Pontikakis, E.D.; Mauss, I.B.; Gross, J.J.; Jabon, M.E.; Hutcherson, C.A.; Nass, C.; John, O. Real-time classification of evoked emotions using facial feature tracking and physiological responses. Int. J. Hum. Comput. Stud. 2008, 66, 303–317. [Google Scholar] [CrossRef]
- Chen, J. Flow in games (and everything else). Commun. ACM 2007, 50, 31. [Google Scholar] [CrossRef]
- Schell, J. The Art of Game Design: A book of Lenses; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Giannakakis, G.; Pediaditis, M.; Manousos, D.; Kazantzaki, E.; Chiarugi, F.; Simos, P.; Marias, K.; Tsiknakis, M. Stress and anxiety detection using facial cues from videos. Biomed. Signal Process. Control 2017, 31, 89–101. [Google Scholar] [CrossRef]
- Anttonen, J.; Surakka, V. Emotions and heart rate while sitting on a chair. In Proceedings of the SIGCHI conference on Human factors in computing systems—CHI’05, Portland, OR, USA, 2–7 April 2005; Association for Computing Machinery (ACM): New York, NY, USA, 2005; pp. 491–499. [Google Scholar] [CrossRef]
- Grundlehner, B.; Brown, L.; Penders, J.; Gyselinckx, B. The Design and Analysis of a Real-Time, Continuous Arousal Monitor. In Proceedings of the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2009; pp. 156–161. [Google Scholar] [CrossRef]
- McDuff, D.J.; Gontarek, S.; Picard, R.W. Remote measurement of cognitive stress via heart rate variability. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2014; pp. 2957–2960. [Google Scholar] [CrossRef]
- Sharma, R.; Khera, S.; Mohan, A.; Gupta, N.; Ray, R.B. Assessment of computer game as a psychological stressor. Indian J. Physiol. Pharmacol. 2006, 50, 367. [Google Scholar] [PubMed]
- Rodriguez, A.; Rey, B.; Vara, M.D.; Wrzesien, M.; Alcaniz, M.; Banos, R.M.; Perez-Lopez, D. A VR-Based Serious Game for Studying Emotional Regulation in Adolescents. IEEE Comput. Grap. Appl. 2015, 35, 65–73. [Google Scholar] [CrossRef]
- Bevilacqua, F.; Backlund, P.; Engström, H. Variations of Facial Actions While Playing Games with Inducing Boredom and Stress. In Proceedings of the 2016 8th International Conference on Games and Virtual Worlds for Serious Applications (VS-GAMES), Barcelona, Spain, 7–9 September 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Van Aart, J.; Bartneck, C.; Hu, J.; Rauterberg, M.; Salem, B. How to behave as Alice in Wonderland–about boredom and curiosity. Entertain. Comput. 2010, 1, 125–137. [Google Scholar] [CrossRef]
- Koster, R. Theory of Fun for Game Design; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2013. [Google Scholar]
- Bevilacqua, F.; Engström, H.; Backlund, P. Changes in heart rate and facial actions during a gaming session with provoked boredom and stress. Entertain. Comput. 2018, 24, 10–20. [Google Scholar] [CrossRef]
- Bevilacqua, F.; Engström, H.; Backlund, P. Automated analysis of facial cues from videos as a potential method for differentiating stress and boredom of players in games. Int. J. Comput. Games Technol. 2018, 2018, 14. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Poh, M.Z.; McDuff, D.J.; Picard, R.W. Advancements in noncontact, multiparameter physiological measurements using a webcam. IEEE Trans. Biomed. Eng. 2011, 58, 7–11. [Google Scholar] [CrossRef] [PubMed]
- Baltrusaitis, T.; Robinson, P.; Morency, L.P. Constrained Local Neural Fields for Robust Facial Landmark Detection in the Wild. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, NSW, Australia, 2–8 December 2013; pp. 354–361. [Google Scholar] [CrossRef]
- Baltrusaitis, T.; Robinson, P.; Morency, L.P. OpenFace: An open source facial behavior analysis toolkit. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Hazlett, R.L. Measuring emotional valence during interactive experiences: Boys at video game play. In Proceedings of the SIGCHI conference on Human Factors in computing systems, Montréal, QC, Canada, 22–27 April 2006; ACM: New York, NY, USA, 2006; pp. 1023–1026. [Google Scholar] [CrossRef]
- Ravaja, N.; Saari, T.; Salminen, M.; Laarni, J.; Kallinen, K. Phasic Emotional Reactions to Video Game Events: A Psychophysiological Investigation. Media Psychol. 2006, 8, 343–367. [Google Scholar] [CrossRef]
- Dinges, D.F.; Rider, R.L.; Dorrian, J.; McGlinchey, E.L.; Rogers, N.L.; Cizman, Z.; Goldenstein, S.K.; Vogler, C.; Venkataraman, S.; Metaxas, D.N. Optical computer recognition of facial expressions associated with stress induced by performance demands. Aviat. Space Environ. Med. 2005, 76, B172–B182. [Google Scholar] [PubMed]
- Metaxas, D.; Venkataraman, S.; Vogler, C. Image-Based Stress Recognition Using a Model-Based Dynamic Face Tracking System. In Proceedings of the Computational Science—ICCS 2004, 4th International Conference, Kraków, Poland, 6–9 June 2004; Springer Nature: Basingstoke, UK, 2004; pp. 813–821. [Google Scholar] [CrossRef]
- Liao, W.; Zhang, W.; Zhu, Z.; Ji, Q. A Decision Theoretic Model for Stress Recognition and User Assistance. In Proceedings of the 20th National Conference on Artificial Intelligence—AAAI’05, Pittsburgh, PA, USA, 9–13 July 2005; AAAI Press: Menlo Park, CA, USA, 2005; Volume 2, pp. 529–534. [Google Scholar]
- Xiao, X.; Wang, J. Towards Attentive, Bi-directional MOOC Learning on Mobile Devices. In Proceedings of the 2015 ACM on International Conference on Multimodal Interaction—ICMI’15, Seattle, WA, USA, 9–13 November 2015; Association for Computing Machinery (ACM): New York, NY, USA, 2015; pp. 163–170. [Google Scholar] [CrossRef]
- Nogueira, P.A.; Torres, V.; Rodrigues, R.; Oliveira, E. An annotation tool for automatically triangulating individuals’ psychophysiological emotional reactions to digital media stimuli. Entertain. Comput. 2015, 9–10, 19–27. [Google Scholar] [CrossRef]
- Vandeput, S.; Taelman, J.; Spaepen, A.; Van Huffel, S. Heart rate variability as a tool to distinguish periods of physical and mental stress in a laboratory environment. In Proceedings of the 6th International Workshop on Biosignal Interpretation (BSI), New Haven, CT, USA, 23–26 June 2009; pp. 187–190. [Google Scholar]
- Garde, A.; Laursen, B.; Jørgensen, A.; Jensen, B. Effects of mental and physical demands on heart rate variability during computer work. Eur. J. Appl. Physiol. 2002, 87, 456–461. [Google Scholar] [CrossRef]
- Kim, K.H.; Bang, S.W.; Kim, S.R. Emotion recognition system using short-term monitoring of physiological signals. Med. Biol. Eng. Comput. 2004, 42, 419–427. [Google Scholar] [CrossRef]
- Moghimi, M.; Stone, R.; Rotshtein, P. Affective Recognition for Multimedia Environments A Review. PsyArXiv 2017. [Google Scholar] [CrossRef]
- Kivikangas, J.M.; Chanel, G.; Cowley, B.; Ekman, I.; Salminen, M.; Järvelä, S.; Ravaja, N. A review of the use of psychophysiological methods in game research. J. Gaming Virtual Worlds 2011, 3, 181–199. [Google Scholar] [CrossRef]
- Choi, J.; Gutierrez-Osuna, R. Using Heart Rate Monitors to Detect Mental Stress. In Proceedings of the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2009; pp. 219–223. [Google Scholar] [CrossRef]
- Valentini, M.; Parati, G. Variables Influencing Heart Rate. Prog. Cardiovasc. Dis. 2009, 52, 11–19. [Google Scholar] [CrossRef]
- Costa, A.; Rincon, J.A.; Carrascosa, C.; Julian, V.; Novais, P. Emotions detection on an ambient intelligent system using wearable devices. Future Gener. Comput. Syst. 2019, 92, 479–489. [Google Scholar] [CrossRef]
- Rincon, J.A.; Julian, V.; Carrascosa, C.; Costa, A.; Novais, P. Detecting emotions through non-invasive wearables. Log. J. IGPL 2018, 26, 605–617. [Google Scholar] [CrossRef]
- Brogni, A.; Vinayagamoorthy, V.; Steed, A.; Slater, M. Variations in physiological responses of participants during different stages of an immersive virtual environment experiment. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology—VRST’06, Limassol, Cyprus, 1–3 November 2006; Association for Computing Machinery (ACM): New York, NY, USA, 2006; pp. 376–382. [Google Scholar] [CrossRef]
- Schrader, C.; Brich, J.; Frommel, J.; Riemer, V.; Rogers, K. Rising to the challenge: An emotion-driven approach toward adaptive serious games. In Serious Games and Edutainment Applications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 3–28. [Google Scholar] [CrossRef]
- Allen, J. Photoplethysmography and its application in clinical physiological measurement. Physiol. Meas. 2007, 28, R1–R39. [Google Scholar] [CrossRef] [PubMed]
- McDuff, D.J.; Estepp, J.R.; Piasecki, A.M.; Blackford, E.B. A survey of remote optical photoplethysmographic imaging methods. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2015; pp. 6398–6404. [Google Scholar] [CrossRef]
- Verkruysse, W.; Svaasand, L.O.; Nelson, J.S. Remote plethysmographic imaging using ambient light. Opt. Express 2008, 16, 21434. [Google Scholar] [CrossRef] [PubMed]
- Zhao, F.; Li, M.; Qian, Y.; Tsien, J.Z. Remote Measurements of Heart and Respiration Rates for Telemedicine. PLoS ONE 2013, 8, e71384. [Google Scholar] [CrossRef] [PubMed]
- Hsu, Y.; Lin, Y.L.; Hsu, W. Learning-based heart rate detection from remote photoplethysmography features. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2014; pp. 4433–4437. [Google Scholar] [CrossRef]
- Tran, D.N.; Lee, H.; Kim, C. A robust real time system for remote heart rate measurement via camera. In Proceedings of the 2015 IEEE International Conference on Multimedia and Expo (ICME), Turin, Italy, 29 June–3 July 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Monkaresi, H.; Calvo, R.A.; Yan, H. A Machine Learning Approach to Improve Contactless Heart Rate Monitoring Using a Webcam. IEEE J. Biomed. Health Inform. 2014, 18, 1153–1160. [Google Scholar] [CrossRef] [PubMed]
- Poh, M.Z.; McDuff, D.J.; Picard, R.W. Non-contact, automated cardiac pulse measurements using video imaging and blind source separation. Opt. Express 2010, 18, 10762. [Google Scholar] [CrossRef]
- Balakrishnan, G.; Durand, F.; Guttag, J. Detecting Pulse from Head Motions in Video. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway Township, NJ, USA, 2013; pp. 3430–3437. [Google Scholar] [CrossRef]
- Wang, W.; Stuijk, S.; de Haan, G. A Novel Algorithm for Remote Photoplethysmography: Spatial Subspace Rotation. IEEE Trans. Biomed. Eng. 2016, 63, 1974–1984. [Google Scholar] [CrossRef]
- De Haan, G.; Jeanne, V. Robust Pulse Rate From Chrominance-Based rPPG. IEEE Trans. Biomed. Eng. 2013, 60, 2878–2886. [Google Scholar] [CrossRef]
- Bartlett, M.S.; Hager, J.C.; Ekman, P.; Sejnowski, T.J. Measuring facial expressions by computer image analysis. Psychophysiology 1999, 36, 253–263. [Google Scholar] [CrossRef]
- Kaiser, S.; Wehrle, T.; Edwards, P. Multi-modal emotion measurement in an interactive computer game: A pilot-study. In Proceedings of the VIII Conference of the International Society for Research on Emotions; ISRE Publications Storrs: Storrs, CT, USA, 1994; pp. 275–279. [Google Scholar]
- Grafsgaard, J.F.; Wiggins, J.B.; Boyer, K.E.; Wiebe, E.N.; Lester, J.C. Automatically Recognizing Facial Expression: Predicting Engagement and Frustration. In Proceedings of the 2013 Humaine Association Conference on Affective Computing and Intelligent Interaction, Geneva, Switzerland, 2–5 September 2013; pp. 43–50. [Google Scholar]
- Wehrle, T.; Kaiser, S. Emotion and facial expression. In Affective Interactions; Paiva, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 49–63. [Google Scholar] [CrossRef]
- Jack, R.E. Culture and facial expressions of emotion. Vis. Cogn. 2013, 21, 1248–1286. [Google Scholar] [CrossRef]
- Salah, A.A.; Sebe, N.; Gevers, T. Communication and automatic interpretation of affect from facial expressions. Affect. Comput. Interact. Psychol. Cogn. Neurosci. Perspect. 2010, 8, 157–183. [Google Scholar] [CrossRef]
- Ekman, P.; Friesen, W.V. Constants across cultures in the face and emotion. J. Personal. Soc. Psychol. 1971, 17, 124–129. [Google Scholar] [CrossRef]
- Samara, A.; Galway, L.; Bond, R.; Wang, H. Sensing Affective States Using Facial Expression Analysis. In Ubiquitous Computing and Ambient Intelligence; Springer Nature: Basingstoke, UK, 2016; pp. 341–352. [Google Scholar] [CrossRef]
- Chang, C.Y.; Tsai, J.S.; Wang, C.J.; Chung, P.C. Emotion recognition with consideration of facial expression and physiological signals. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence in Bioinformatics and Computational Biology, Nashville, TN, USA, 30 March–2 April 2009; pp. 278–283. [Google Scholar] [CrossRef]
- Hammal, Z.; Couvreur, L.; Caplier, A.; Rombaut, M. Facial expression classification: An approach based on the fusion of facial deformations using the transferable belief model. Int. J. Approx. Reason. 2007, 46, 542–567. [Google Scholar] [CrossRef]
- Tang, H.; Huang, T.S. 3D facial expression recognition based on automatically selected features. In Proceedings of the 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Tang, H.; Huang, T.S. 3D facial expression recognition based on properties of line segments connecting facial feature points. In Proceedings of the 2008 8th IEEE International Conference on Automatic Face & Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Hupont, I.; Baldassarri, S.; Cerezo, E. Facial emotional classification: From a discrete perspective to a continuous emotional space. Pattern Anal. Appl. 2013, 16, 41–54. [Google Scholar] [CrossRef]
- Blom, P.M.; Bakkes, S.; Tan, C.T.; Whiteson, S.; Roijers, D.M.; Valenti, R.; Gevers, T. Towards Personalised Gaming via Facial Expression Recognition. In Proceedings of the AIIDE’14 Proceedings of the Tenth AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, Raleigh, NC, USA, 3–7 October 2014. [Google Scholar]
- Akakın, H.Ç.; Sankur, B. Spatiotemporal-Boosted DCT Features for Head and Face Gesture Analysis. In Human Behavior Understanding; Springer Nature: Basingstoke, UK, 2010; pp. 64–74. [Google Scholar] [CrossRef]
- Shaker, N.; Asteriadis, S.; Yannakakis, G.N.; Karpouzis, K. A game-based corpus for analysing the interplay between game context and player experience. In Affective Computing and Intelligent Interaction; Springer: Berlin/Heidelberg, Germany, 2011; pp. 547–556. [Google Scholar]
- Russell, J.A. Evidence of convergent validity on the dimensions of affect. J. Personal. Soc. Psychol. 1978, 36, 1152–1168. [Google Scholar] [CrossRef]
- Posner, J.; Russell, J.A.; Peterson, B.S. The circumplex model of affect: An integrative approach to affective neuroscience, cognitive development, and psychopathology. Dev. Psychopathol. 2005, 17, 715–734. [Google Scholar] [CrossRef]
- Nakamura, J.; Csikszentmihalyi, M. The Concept of Flow. In Flow and the Foundations of Positive Psychology; Springer: Dordrecht, The Netherlands, 2014; pp. 239–263. [Google Scholar] [CrossRef]
- Brown, E.; Cairns, P. A grounded investigation of game immersion. In Proceedings of the CHI’04 extended abstracts on Human factors in computing systems, Boston, MA, USA, 4–9 April 2004; ACM: New York, NY, USA, 2004; pp. 1297–1300. [Google Scholar]
- Weibel, D.; Wissmath, B. Immersion in computer games: The role of spatial presence and flow. Int. J. Comput. Games Technol. 2011, 2011, 6. [Google Scholar] [CrossRef]
- Sweetser, P.; Wyeth, P. GameFlow. Comput. Entertain. (CIE) 2005, 3, 3. [Google Scholar] [CrossRef]
- Cruz, C.A.; Uresti, J.A.R. Player-centered game AI from a flow perspective: Towards a better understanding of past trends and future directions. Entertain. Comput. 2017, 20, 11–24. [Google Scholar] [CrossRef]
- Chanel, G.; Rebetez, C.; Bétrancourt, M.; Pun, T. Emotion Assessment From Physiological Signals for Adaptation of Game Difficulty. IEEE Trans. Syst. Man, Cybern. Part A Syst. Humans 2011, 41, 1052–1063. [Google Scholar] [CrossRef]
- Golden, C. Stroop colour and word test. Age 1978, 15, 90. [Google Scholar]
- Zhou, D.; Luo, J.; Silenzio, V.M.; Zhou, Y.; Hu, J.; Currier, G.; Kautz, H. Tackling Mental Health by Integrating Unobtrusive Multimodal Sensing. In Proceedings of the AAAI’15 Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence, Austin, TX, USA, 25–30 January 2015. [Google Scholar]
- Unsworth, N.; Redick, T.S.; McMillan, B.D.; Hambrick, D.Z.; Kane, M.J.; Engle, R.W. Is Playing Video Games Related to Cognitive Abilities? Psychol. Sci. 2015, 26, 759–774. [Google Scholar] [CrossRef] [PubMed]
- Terlecki, M.S.; Newcombe, N.S. How important is the digital divide? The relation of computer and videogame usage to gender differences in mental rotation ability. Sex Roles 2005, 53, 433–441. [Google Scholar] [CrossRef]
- Hermerén, G.; Almgren, K.; Bengtsson, P.; Cannon, B.; Eriksson, S.; Höglund, P. Good Research Practice; The Swedish Research Council: Stockholm, Sweden, 2011.
- Pedersen, C.; Togelius, J.; Yannakakis, G.N. Modeling player experience in Super Mario Bros. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence and Games, Milano, Italy, 7–10 Septmber 2009; pp. 132–139. [Google Scholar] [CrossRef]
- Pedersen, C.; Togelius, J.; Yannakakis, G.N. Modeling Player Experience for Content Creation. IEEE Trans. Comput. Intell. AI Games 2010, 2, 54–67. [Google Scholar] [CrossRef]
- Shaker, N.; Yannakakis, G.N.; Togelius, J. Feature analysis for modeling game content quality. In Proceedings of the 2011 IEEE Conference on Computational Intelligence and Games (CIG’11), Seoul, South Korea, 31 August–3 September 2011; pp. 126–133. [Google Scholar] [CrossRef]
- Bergstra, J.; Bengio, Y. Random search for hyper-parameter optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Valenza, G.; Citi, L.; Lanatá, A.; Scilingo, E.P.; Barbieri, R. Revealing Real-Time Emotional Responses: A Personalized Assessment based on Heartbeat Dynamics. Sci. Rep. 2014, 4. [Google Scholar] [CrossRef]
- Kassraian-Fard, P.; Matthis, C.; Balsters, J.H.; Maathuis, M.H.; Wenderoth, N. Promises, Pitfalls, and Basic Guidelines for Applying Machine Learning Classifiers to Psychiatric Imaging Data, with Autism as an Example. Front. Psychiatry 2016, 7, 177. [Google Scholar] [CrossRef]
- Combrisson, E.; Jerbi, K. Exceeding chance level by chance: The caveat of theoretical chance levels in brain signal classification and statistical assessment of decoding accuracy. J. Neurosci. Methods 2015, 250, 126–136. [Google Scholar] [CrossRef]
- Roald, N.G. Estimation of Vital Signs from Ambient-Light Non-Contact Photoplethysmography. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2013. [Google Scholar]
- Siegel, E.H.; Sands, M.K.; Van den Noortgate, W.; Condon, P.; Chang, Y.; Dy, J.; Quigley, K.S.; Barrett, L.F. Emotion fingerprints or emotion populations? A meta-analytic investigation of autonomic features of emotion categories. Psychol. Bull. 2018, 144, 343. [Google Scholar] [CrossRef]
- Mason, R.O. Applying ethics to information technology issues. Commun. ACM 1995, 38, 55–57. [Google Scholar] [CrossRef]
- Ladd, J. Computers and moral responsibility: A framework for an ethical analysis. In Computerization and Controversy; Academic Press Professional, Inc.: San Diego, CA, USA, 1991; pp. 664–675. [Google Scholar]
- Pantic, M.; Rothkrantz, L.J. Toward an affect-sensitive multimodal human–computer interaction. Proc. IEEE 2003, 91, 1370–1390. [Google Scholar] [CrossRef]
- Culnan, M.J. Protecting Privacy Online: Is Self-Regulation Working? J. Public Policy Mark. 2000, 19, 20–26. [Google Scholar] [CrossRef]
- Stone, E.F.; Gueutal, H.G.; Gardner, D.G.; McClure, S. A field experiment comparing information-privacy values, beliefs, and attitudes across several types of organizations. J. Appl. Psychol. 1983, 68, 459–468. [Google Scholar] [CrossRef]
- Ackerman, M.S.; Mainwaring, S.D. Privacy issues and human–computer interaction. Computer 2005, 27, 19–26. [Google Scholar]
- Awad, N.F.; Krishnan, M.S. The Personalization Privacy Paradox: An Empirical Evaluation of Information Transparency and the Willingness to Be Profiled Online for Personalization. MIS Q. 2006, 30, 13–28. [Google Scholar] [CrossRef]
- Nguyen, K.D.; Rosoff, H.; John, R.S. The effects of attacker identity and individual user characteristics on the value of information privacy. Comput. Hum. Behav. 2016, 55, 372–383. [Google Scholar] [CrossRef]
- Bellotti, V.; Sellen, A. Design for Privacy in Ubiquitous Computing Environments. In Proceedings of the Third European Conference on Computer-Supported Cooperative Work 13–17 September 1993, Milan, Italy ECSCW’93; Springer: Dordrecht, The Netherlands, 1993; pp. 77–92. [Google Scholar] [CrossRef]
- Langheinrich, M. Privacy by design—Principles of privacy-aware ubiquitous systems. In International Conference on Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2001; pp. 273–291. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Name | Description |
|---|---|---|
| Mouth outer | Monitor the zygomatic muscle. | |
| Mouth corner | Monitor the zygomatic muscle. | |
| Eye area | Monitor the orbicularis oculi muscle, e.g., blinking. | |
| Eyebrow activity | Monitor the corrugator muscle. | |
| Face area | Monitor facial movement to and away from the camera | |
| Face motion | Describe the total distance the head has moved in any direction in a short period of time. | |
| Facial COM | Describe the overall movement of all 68 facial landmarks. | |
| Remote HR | HR estimated using the rPPG technique proposed by Poh et al. [45]. |
| Answer | Subjects in Study 1 (%) | Subjects in Study 2 (%) |
|---|---|---|
| No skill | 1 (5%) | 6 (9.7%) |
| Not very skilled | 10 (50%) | 19 (30.6%) |
| Moderately skilled | 7 (35%) | 25 (40.3%) |
| Very skilled | 2 (10%) | 12 (19.9%) |
| Answer (in Hours) | Subjects in Study 1 (%) | Subjects in Study 2 (%) |
|---|---|---|
| More than 10 | 2 (10%) | 25 (40.3%) |
| 5 to 10 | 6 (30%) | 7 (11.3%) |
| 3 to 4 | 2 (10%) | 6 (9.7%) |
| 1 to 3 | 2 (10%) | 5 (8.1%) |
| 0 to 1 | 4 (20%) | 10 (16.1%) |
| 0 | 4 (20%) | 9 (14.5%) |
| Level | Type | Emotion | Adjustments |
|---|---|---|---|
| Overground | Any | Reduced number of interactable/collectable items and terrain obstacles; no power-ups; only 2 enemies and 1 gap (with width of Mario himself); Mario starts in big state. | |
| Underground | Any | Regular number of interactable/collectable items, terrain obstacles, power-ups and enemies. Mario starts in small state. | |
| Castle | Stress | Several gaps (with varying widths); reduced number of interactable items; no collectables/power-ups; several enemies; reduced time to complete level. Mario remains in small state. Mario starts with 5 lives. Available level time is 80 s. | |
| Overground | Boredom | Auto-scrolling camera; reduced number of interactable/collectable items; few terrain obstacles; no gaps, power-ups, or enemies. Mario remains in big state. | |
| Underground | Any | Regular number of interactable/collectable items, terrain obstacles, power-ups and enemies. Mario starts in small state. | |
| Castle | Stress | Several gaps (with varying widths); reduced number of interactable items; no collectables/power-ups; several enemies; reduced time to complete level. Mario remains in small state. Mario starts with 5 lives. Available level time is 80 s. | |
| Overground | Boredom | Auto-scrolling camera; reduced number of interactable/collectable items; few terrain obstacles; no gaps, power-ups, or enemies. Mario remains in big state. |
| Name | Feature Set | Note | |
|---|---|---|---|
| 1 | MULTI_R | , , , , , , | Facial analysis, rPPG-estimated HR. |
| 2 | MULTI_G | , , , , , , | Facial analysis, HR from physical sensor. |
| 3 | FACE | , , , , , | Facial analysis only. |
| 4 | HR_R | rPPG-estimated HR only. | |
| 5 | HR_G | HR from physical sensor only. |
| Test | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| MULTI_R | 0.604 | 0.612 | 0.599 | 0.521 |
| MULTI_G | 0.623 | 0.583 | 0.607 | 0.514 |
| FACE | 0.594 | 0.601 | 0.585 | 0.507 |
| HR_R | 0.547 | 0.541 | 0.545 | 0.497 |
| HR_G | 0.608 | 0.656 | 0.624 | 0.581 |
| Test | Accuracy | Precision | Recall | F1 | ||||
|---|---|---|---|---|---|---|---|---|
| min | max | min | max | min | max | min | max | |
| MULTI_R | 0.19 | 0.91 | 0.00 | 0.95 | 0.19 | 0.87 | 0.00 | 0.91 |
| MULTI_G | 0.25 | 0.98 | 0.00 | 0.97 | 0.13 | 0.98 | 0.00 | 0.98 |
| FACE | 0.26 | 0.90 | 0.00 | 0.95 | 0.12 | 0.90 | 0.00 | 0.89 |
| HR_R | 0.36 | 0.72 | 0.00 | 0.79 | 0.18 | 0.77 | 0.00 | 0.67 |
| HR_G | 0.38 | 0.82 | 0.26 | 0.85 | 0.23 | 0.87 | 0.00 | 0.81 |
| Level | Stress | Boredom |
|---|---|---|
| 1.6 ± 0.8 | 2.3 ± 1.2 | |
| 2.1 ± 0.9 | 1.8 ± 1.1 | |
| 2.9 ± 0.9 | 1.9 ± 1.2 | |
| 1.5 ± 1.0 | 3.9 ± 1.2 | |
| 2.0 ± 0.8 | 2.2 ± 1.2 | |
| 3.0 ± 1.1 | 2.1 ± 1.2 | |
| 1.3 ± 0.7 | 4.0 ± 1.2 |
| Accuracy | Precision | Recall | F1 |
|---|---|---|---|
| 0.6158 | 0.6163 | 0.6127 | 0.5786 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bevilacqua, F.; Engström, H.; Backlund, P. Game-Calibrated and User-Tailored Remote Detection of Stress and Boredom in Games. Sensors 2019, 19, 2877. https://doi.org/10.3390/s19132877
Bevilacqua F, Engström H, Backlund P. Game-Calibrated and User-Tailored Remote Detection of Stress and Boredom in Games. Sensors. 2019; 19(13):2877. https://doi.org/10.3390/s19132877
Chicago/Turabian StyleBevilacqua, Fernando, Henrik Engström, and Per Backlund. 2019. "Game-Calibrated and User-Tailored Remote Detection of Stress and Boredom in Games" Sensors 19, no. 13: 2877. https://doi.org/10.3390/s19132877
APA StyleBevilacqua, F., Engström, H., & Backlund, P. (2019). Game-Calibrated and User-Tailored Remote Detection of Stress and Boredom in Games. Sensors, 19(13), 2877. https://doi.org/10.3390/s19132877