Low-Power Distributed Data Flow Anomaly-Monitoring Technology for Industrial Internet of Things



Abstract
1. Introduction
2. Background
3. Low-Power Distributed Dataflow Anomaly Monitoring Model
3.1. Model Description
3.2. Overview of the Model
- (1)
- For all objects that exceed each of their threshold Ti, the existing uniform threshold assignment (UTA) is used to continuously track approximate values satisfying accuracy constraints, to ensure that the monitored value of each object satisfies the requirements set forth in Definition 1.
- (2)
- For most objects that do not exceed their corresponding Ti, only the object Omax with the largest global value is selected as the representative value for continuous tracking.
- (3)
- Through the “adjustment factor” parameter, we adjust the local value of the object Omax to be the largest on each remote node to ensure that other objects can be represented by Omax, that is, if Omax does not exceed the threshold, other objects do not exceed the threshold either.
- (4)
- Continuous monitoring of multiple objects is transformed into monitoring of Omax keeping its local maximum constraints. Communication is required only when the constraints are no longer satisfied due to the arrival of new data, thus reducing the communication overheads.
3.3. Model Description
3.3.1. Framework of Algorithms for the Model
| Algorithm 1. Low-power distributed data flow anomaly-monitoring model (LP-DDAM). | |
| 1 | N0 obtains the initial value Vi,j of each object, and selects the object Omax with the largest global value as the representative for continuous monitoring. Then, the reallocation algorithm (defined below in Section 3.3.3) is used to assign the adjustment factors εi,j on each node Nj (j = 0, …, n) for each object Oi (i =1, …, m) in U, and then they are sent to the corresponding Nj. |
| 2 | Each monitoring node Nj (j = 1, …, n) monitors the local data flow Sj separately: |
| 3 | While (1) |
| 4 | Read the data in Sj <Oi, Nj, t, Vi,j,t> |
| 5 | Vi,j = Vi,j + Vi,j,t |
| 6 | If , Vmax,j + εmax,j ≤ Vc,j + εc,j |
| 7 | Use the “Adjustment algorithm” to adjust the system |
| 8 | If the centralized node N0 finds that Vmax exceeds the threshold, then we set OT = OT + {Omax}, and U = U − {Omax}, and then the LP-DDAM algorithm is again used. |
| 9 | If the object that previously exceeded the threshold is below the threshold at a certain time, the third step in the resolution process is called for adjustment. |
3.3.2. Adjustment Process
| Algorithm 2. Adjustment. | |
| 1 | Nc sends reconstruction constraint requests to N0, including the conflict set C, the monitoring values of objects in C on Nc, Vmax,c and the lower bound Bc. |
| 2 | N0 carries out a validity test: If ,, then the validity test is successful. Call the “reallocation algorithm” to recalculate the adjustment factors of Nc and N0, and then the new adjustment factors are sent to Nc. At this point, the resolution process ends. If the validity test fails, the third step is executed. |
| 3 | N0 obtains the monitored values of objects and Omax in set C from each node and the lower bound Bj, and then identifies the new representative object O’max according to the aggregated values of objects. Finally, it calls the reallocation function to recalculate the adjustment factors of all nodes, and sends O’max and new adjustment factors to each monitoring node. |
3.3.3. Adjustment Factor Allocation
- (1)
- ;
- (2)
- If , Fj = 0;
- (3)
| Algorithm 3. Reallocation | |
| Input: C, N, {Bj}, {Vi,j}, {εi,j}, {Fj} | |
| Output: {ε’i,j } | |
| 1 | For each object Oi in , the allocated balance λi is calculated as λi = ViN − BN |
| 2 | For each object Oi in R, its new adjustment factor ε’i,j on each node in N is calculated as ε’i,j = Bj − Vi,j + Fjλi |
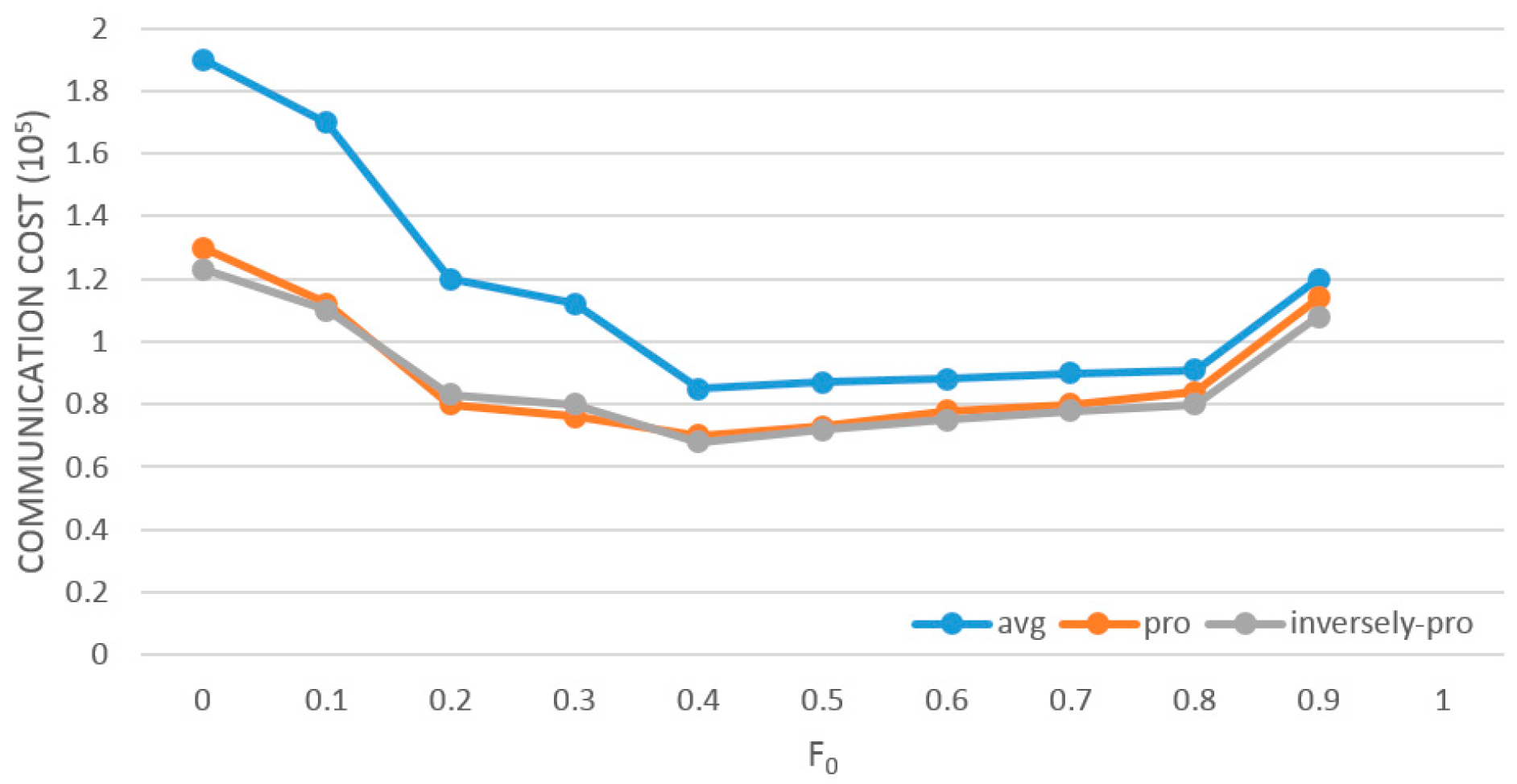
- Average allocation strategy. The “surplus” is allocated equally among remote nodes, i.e., Fj = (1 − F0)/(|N| − 1).
- Proportional allocation strategy. The allocation of “surplus” is proportional to the lower bound Bj of node Nj, i.e., Fj = (1 − F0)Bj/(BN − B0).
- Inversely proportional allocation strategy. The allocation of “surplus” is inversely proportional to (Vmax,j − Bj), i.e., .
4. Analysis and Extension of the Model
4.1. Proof of Correctness of the Proposed Solution
4.2. Performance Analysis of the Algorithms
4.3. LP-DDAM Model Extension
5. Experimental Analysis
5.1. Experimental Data
5.2. Experiment Results and Analysis
5.2.1. Influence of Allocation Factor and Allocation Strategy on Communication Overheads
5.2.2. Influence of Allocation Factor and Thresholds on Communication Overheads
5.2.3. Change of Communication Overheads with the Number of Monitored Objects
5.2.4. Influence of Error Parameters on Reducing Communication Overheads
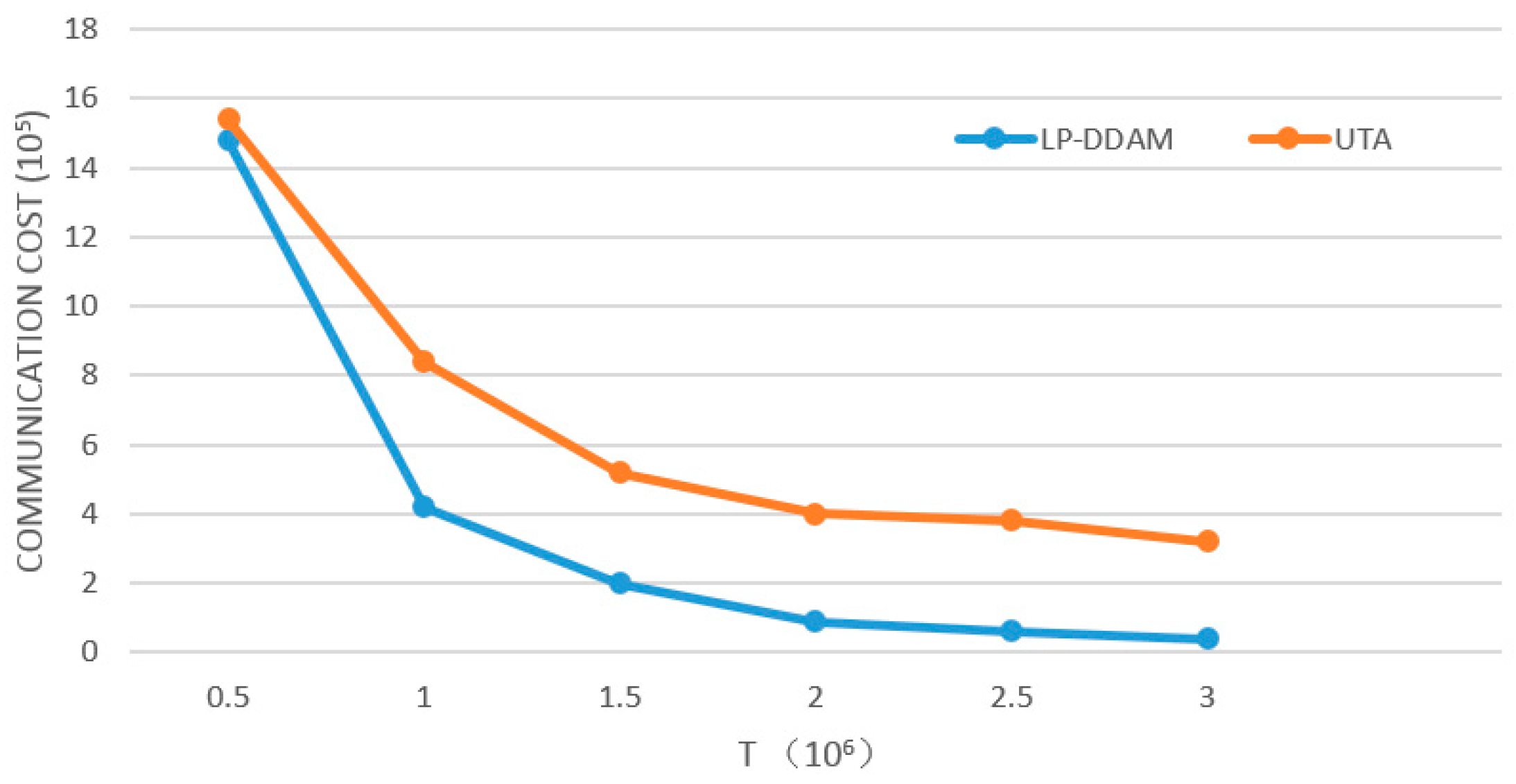
5.2.5. Changes of Communication Overheads with Threshold Parameters
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Du, X.; Chen, H.H. Security in Wireless Sensor Networks. IEEE Wirel. Commun. Mag. 2008, 15, 60–66. [Google Scholar]
- Tian, Z.; Su, S.; Shi, W.; Du, X.; Guizani, M.; Yu, X. A Data-driven Model for Future Internet Route Decision Modeling. Future Gener. Comput. Syst. 2019, 95, 212–220. [Google Scholar] [CrossRef]
- Tian, Z.; Li, M.; Qiu, M.; Sun, Y.; Su, S. Block-DEF: A Secure Digital Evidence System using Blockchain. Inf. Sci. 2019, 491, 151–165. [Google Scholar] [CrossRef]
- Bhatkar, S.; Chaturvedi, A.; Sekar, R. Dataflow Anomaly Detection. In Proceedings of the 2006 IEEE Symposium on Security & Privacy, Berkeley/Oakland, CA, USA, 21–24 May 2006. [Google Scholar]
- Hong, Y.; Xu, C.; Su, D.X. Research of Smart Phone Malware Detection Based on Anomaly Data Flow Monitoring. Comput. Secur. 2012, 9, 4. [Google Scholar]
- Tian, Z.; Shi, W.; Wang, Y.; Zhu, C.; Du, X.; Su, S.; Sun, Y.; Guizani, N. Real Time Lateral Movement Detection based on Evidence Reasoning Network for Edge Computing Environment. IEEE Trans. Ind. Inform. 2019. [Google Scholar] [CrossRef]
- Xiao, Y.; Rayi, V.; Sun, B.; Du, X.; Hu, F.; Galloway, M. A Survey of Key Management Schemes in Wireless Sensor Networks. J. Comput. Commun. 2007, 30, 2314–2341. [Google Scholar] [CrossRef]
- Du, X.; Xiao, Y.; Guizani, M.; Chen, H.H. An Effective Key Management Scheme for Heterogeneous Sensor Networks. Ad Hoc Netw. 2007, 5, 24–34. [Google Scholar] [CrossRef]
- Tan, Q.; Gao, Y.; Shi, J.; Wang, X.; Fang, B.; Tian, Z. Towards a Comprehensive Insight into the Eclipse Attacks of Tor Hidden Services. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Xiao, Y.; Du, X.; Zhang, J.; Guizani, S. Internet Protocol Television (IPTV): The Killer Application for the Next Generation Internet. IEEE Commun. Mag. 2007, 45, 126–134. [Google Scholar] [CrossRef]
- Nirmali, B.; Wickramasinghe, S.; Munasinghe, T.; Amalraj, C.R.J.; Dilum Bandara, H.M.N. Vehicular data acquisition and analytics system for real-time driver behavior monitoring and anomaly detection. In Proceedings of the 2017 IEEE International Conference on Industrial & Information Systems, Peradeniya, Sri Lanka, 15–16 December 2017. [Google Scholar]
- Qidwai, U.; Chaudhry, J.; Jabbar, S.; Zeeshan, H.M.A.; Janjua, N.; Khalid, S. Using casual reasoning for anomaly detection among ECG live data streams in ubiquitous healthcare monitoring systems. J. Ambient. Intell. Humaniz. Comput. 2018, 1–13. [Google Scholar] [CrossRef]
- Zhang, C.; Yan, H.; Lee, S.; Shi, J. Multiple profiles sensor-based monitoring and anomaly detection. J. Qual. Technol. 2018, 50, 344–362. [Google Scholar] [CrossRef]
- Siow, E.; Tiropanis, T.; Hall, W. Analytics for the Internet of Things: A Survey. ACM Comput. Surv. 2018, 1, 1. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Suárez-Albela, M.; Castedo, L.; González-López, M. A Review on Internet of Things for Defense and Public Safety. Sensors 2016, 16, 1644. [Google Scholar] [CrossRef] [PubMed]
- Dilman, M.; Raz, D. Efficient reactive monitoring. IEEE J. Sel. Areas Commun. (JSAC) 2002, 20, 668–676. [Google Scholar] [CrossRef]
- Kale, A.; Chaczko, Z. iMuDS: An Internet of Multimodal Data Acquisition and Analysis Systems for Monitoring Urban Waterways. In Proceedings of the 2017 25th International Conference on Systems Engineering, Las Vegas, NV, USA, 22–24 August 2017. [Google Scholar]
- Sun, J.; Zhang, R.; Zhang, J.; Zhang, Y. PriStream: Privacy-preserving distributed stream monitoring of thresholded PERCENTILE statistics. In Proceedings of the IEEE Infocom 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Macker, A.; Malatyali, M.; Heide, F.M.A.D. Online Top-k-Position Monitoring of Distributed Data Streams. In Proceedings of the 2015 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Hyderabad, India, 25–29 May 2015. [Google Scholar]
- Wang, C.; Zhao, Z.; Gong, L.; Zhu, L.; Liu, Z.; Cheng, X. A Distributed Anomaly Detection System for In-Vehicle Network using HTM. IEEE Access 2018, 6, 9091–9098. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Metje, N.; Chapman, D.; Anthony, C. Water pipeline failure detection using distributed relative pressure and temperature measurements and anomaly detection algorithms. Urban Water J. 2018, 15, 287–295. [Google Scholar] [CrossRef]
- Jiménez, J.M.H.; Nichols, J.A.; Gosevapopstojanova, K.; Prowell, S.; Bridges, R. Malware Detection on General-Purpose Computers Using Power Consumption Monitoring: A Proof of Concept and Case Study. arXiv 2017, arXiv:1705.01977. [Google Scholar]
- Tian, Z.; Gao, X.; Su, S.; Qiu, J.; Du, X.; Guizani, M. Evaluating Reputation Management Schemes of Internet of Vehicles based on Evolutionary Game Theory. IEEE Trans. Veh. Technol. 2019, 1. [Google Scholar] [CrossRef]
- Sany Heavy Industry. Available online: http://www.sanyhi.com/company/hi/zh-cn/ (accessed on 21 March 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning | Symbols | Meaning |
|---|---|---|---|
| U | Universe of data objects | Vi,j | Partial data value of Oi on node Nj |
| T | User-specified threshold | εi,j | Adjustment factor for Vi,j |
| Oi | Data object (i = 1, …, m) | Nc | Remote node violating the local constrain |
| Omax | The representative object | C | Set of objects violating the local constrain |
| N0 | Central coordinator node | R | Set of nodes participating in resolution |
| Nj | Remote node (j = 1, …, n) | N | Set of all nodes |
| Sj | local data flow in Nj | Bj | Border value from node Nj |
| Vi | Global value for object Oi | OT | Set of objects that exceed the threshold T |
| δ | precision constraint parameter | V′ | approximate monitoring value |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, W.; Tian, Z.; Shi, W.; Huang, Z.; Li, S. Low-Power Distributed Data Flow Anomaly-Monitoring Technology for Industrial Internet of Things. Sensors 2019, 19, 2804. https://doi.org/10.3390/s19122804
Han W, Tian Z, Shi W, Huang Z, Li S. Low-Power Distributed Data Flow Anomaly-Monitoring Technology for Industrial Internet of Things. Sensors. 2019; 19(12):2804. https://doi.org/10.3390/s19122804
Chicago/Turabian StyleHan, Weihong, Zhihong Tian, Wei Shi, Zizhong Huang, and Shudong Li. 2019. "Low-Power Distributed Data Flow Anomaly-Monitoring Technology for Industrial Internet of Things" Sensors 19, no. 12: 2804. https://doi.org/10.3390/s19122804
APA StyleHan, W., Tian, Z., Shi, W., Huang, Z., & Li, S. (2019). Low-Power Distributed Data Flow Anomaly-Monitoring Technology for Industrial Internet of Things. Sensors, 19(12), 2804. https://doi.org/10.3390/s19122804