Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images



Abstract
1. Introduction
2. Materials and Methods
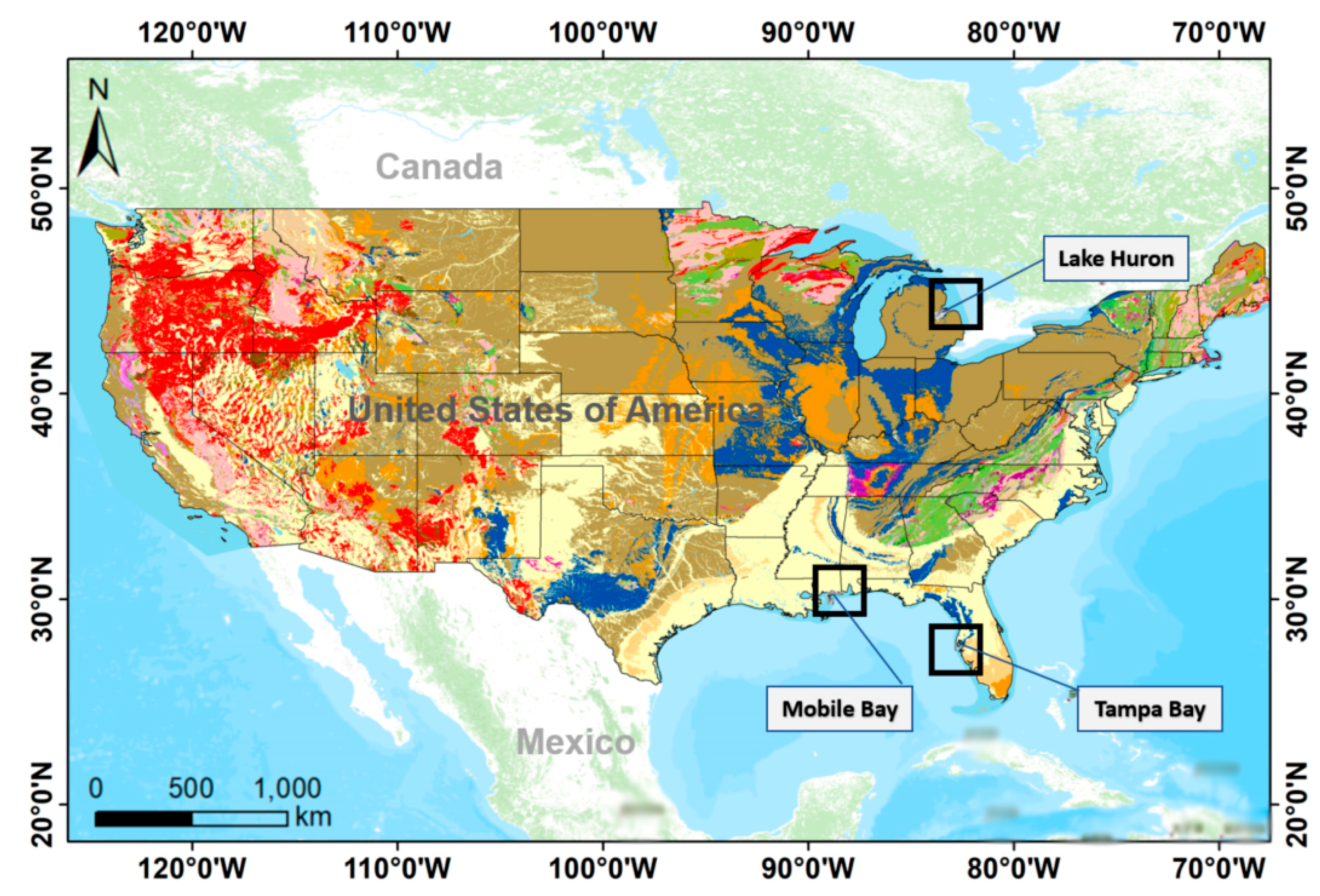
2.1. Study Area
2.2. Dataset
2.2.1. Satellite Multispectral Images
2.2.2. Bathymetric Ddata
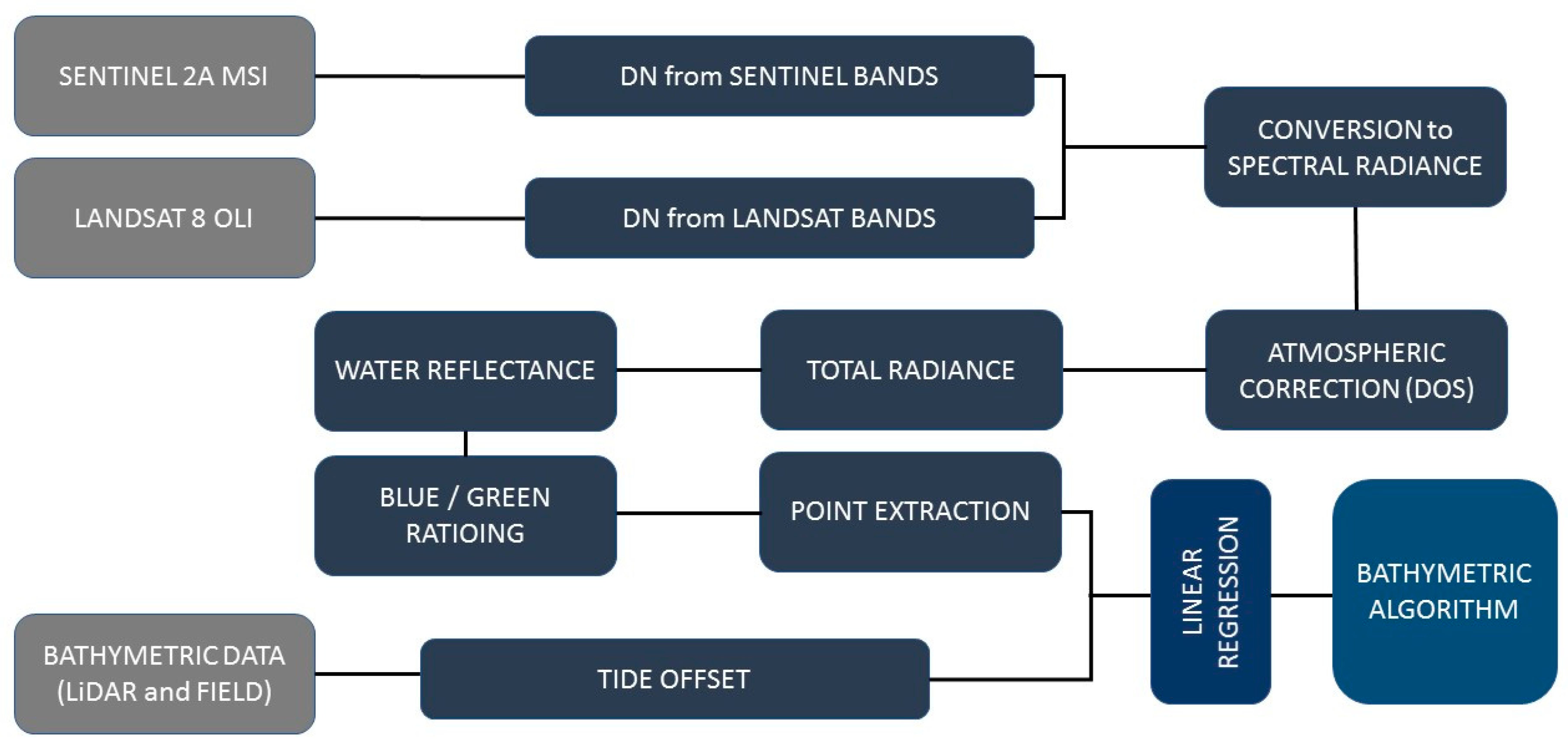
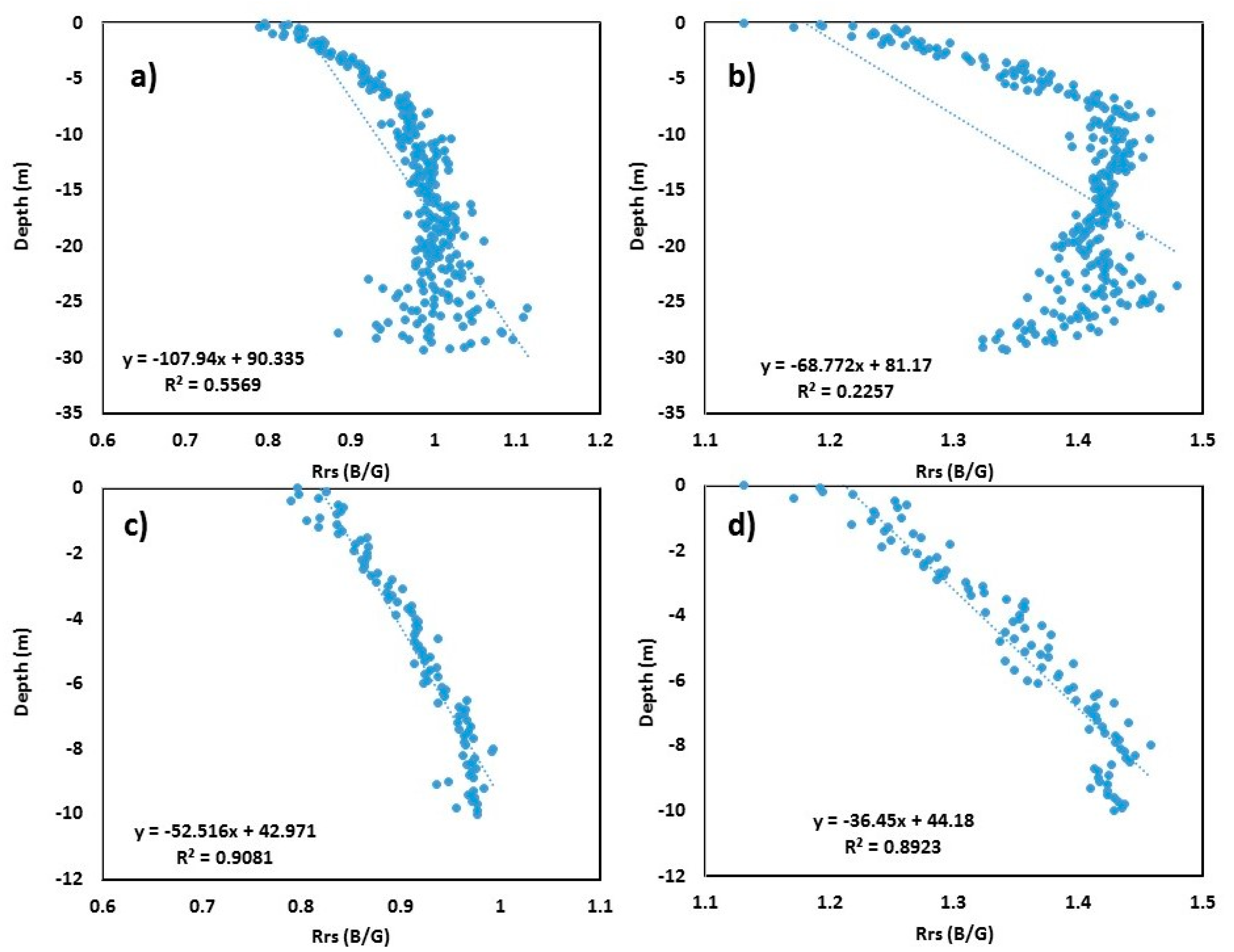
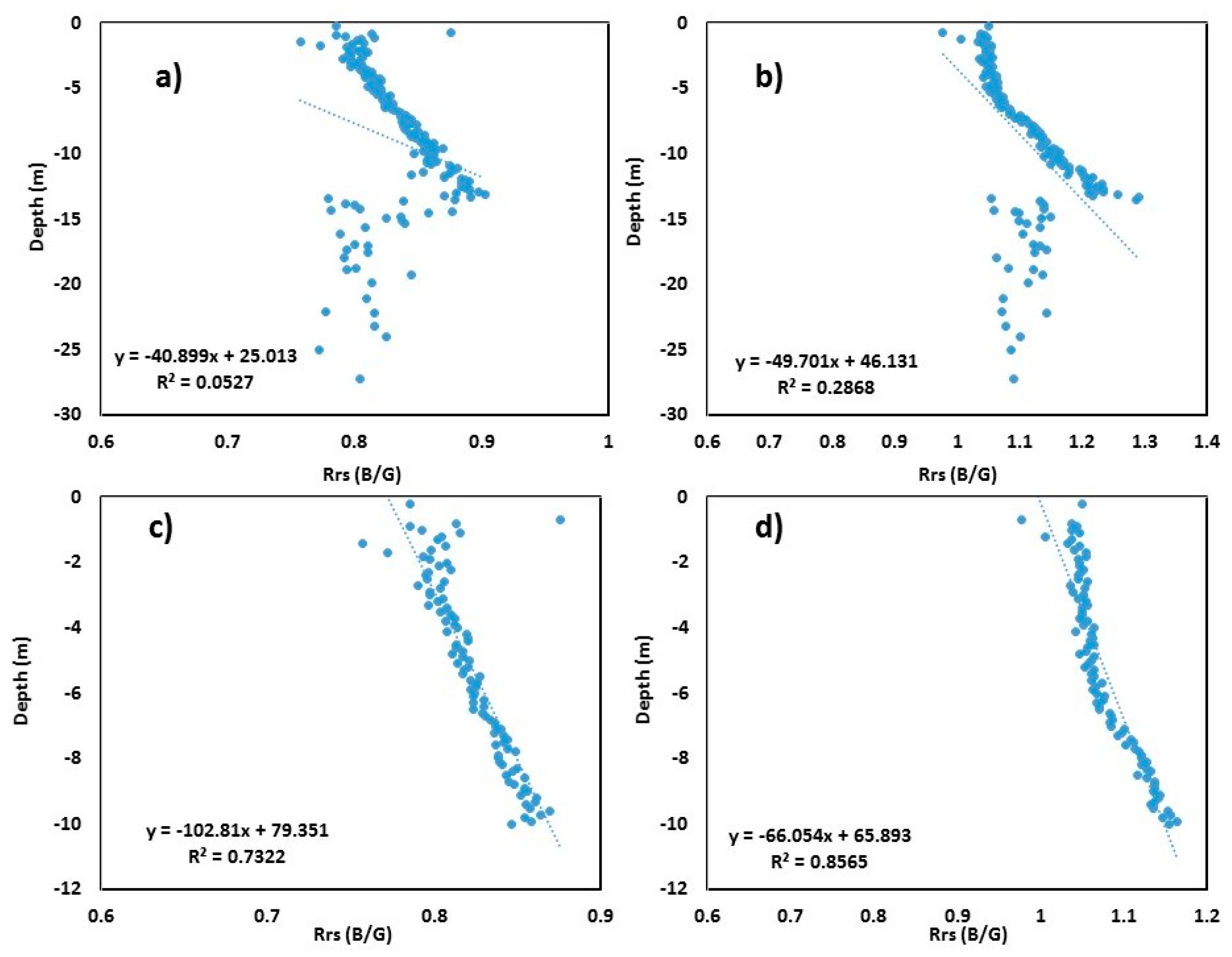
2.3. Empirically Derived Water Depth
2.4. Random Forest Model
2.5. Accuracy Assessment
- (i)
- Root-mean-square error (RMSE) is widely used for error measurements between a set of estimates and actual values, and it is a standard measure of map accuracy [43].
- (ii)
- Mean absolute error (MAE) measures the average magnitude of errors in a set of predicted values, without considering their direction. The RMSE will always be larger than or equal to the MAE.where ZSDB represents the predicted values, ZRef represents the actual values, and N is the number of observations.
3. Results
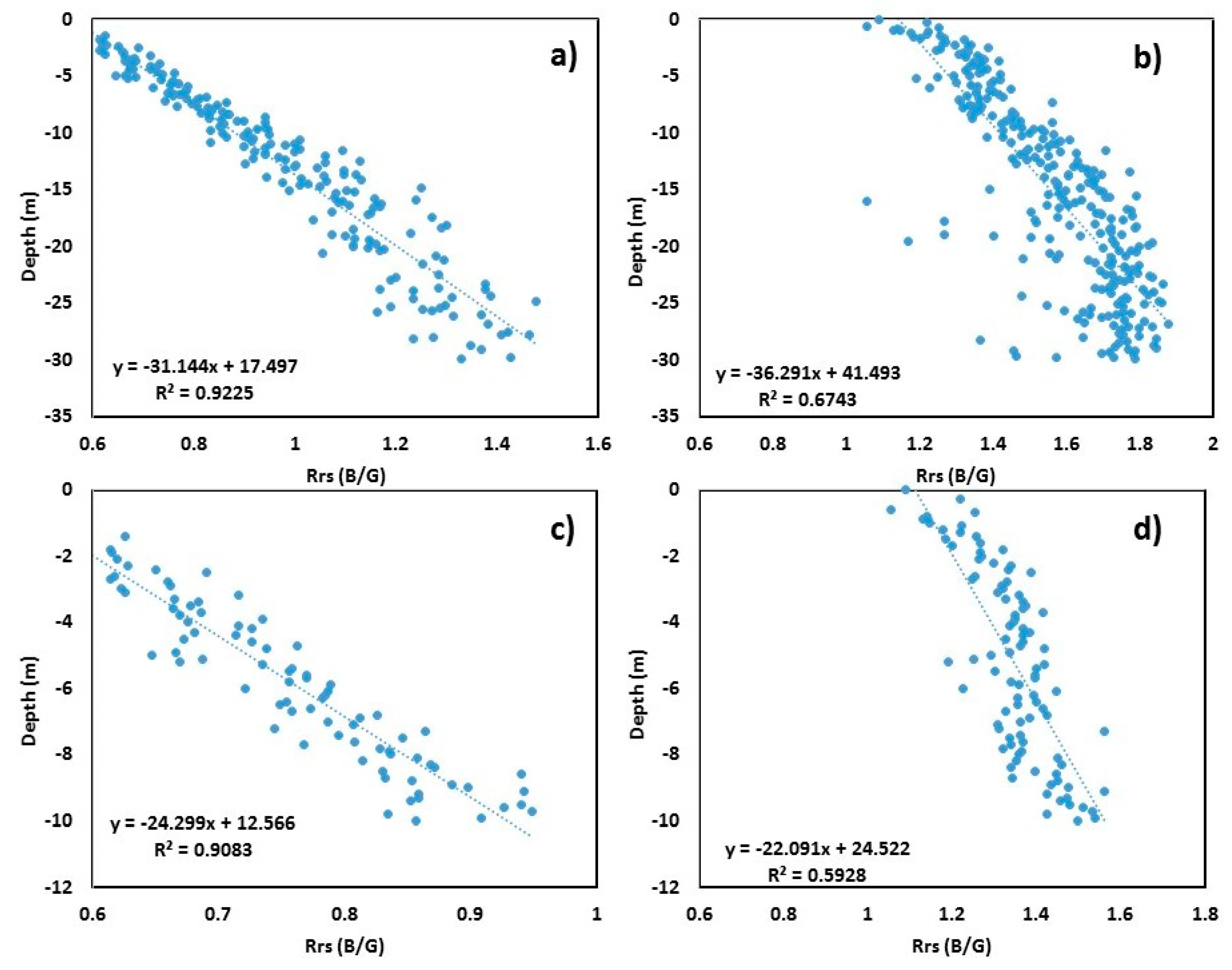
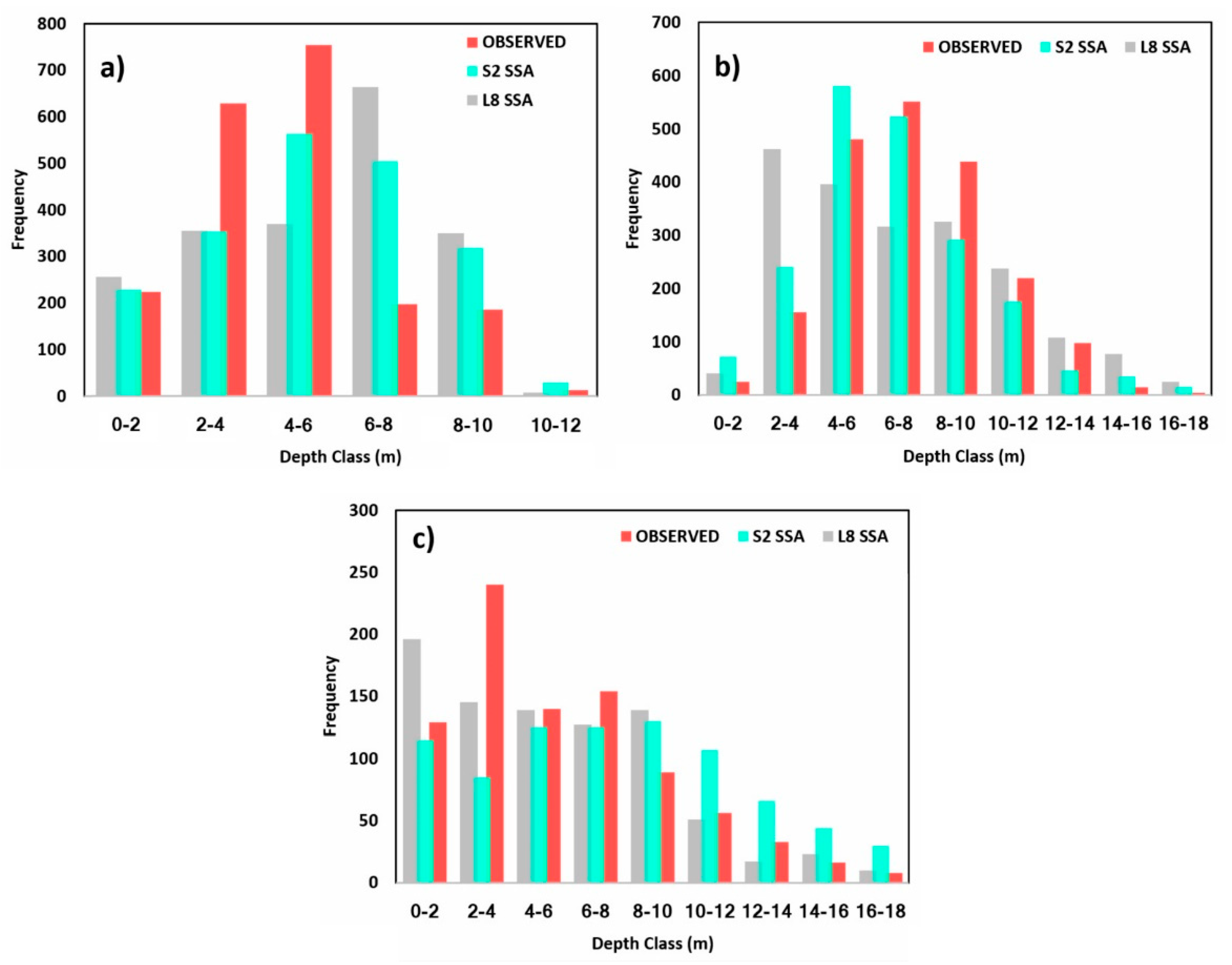
3.1. Site-Specific Bathymetric Algorithm (Mobile Bay)
3.2. Site-Specific Bathymetric Algorithm (Tampa Bay)
3.3. Site-Specific Bathymetric Algorithm (Lake Huron)
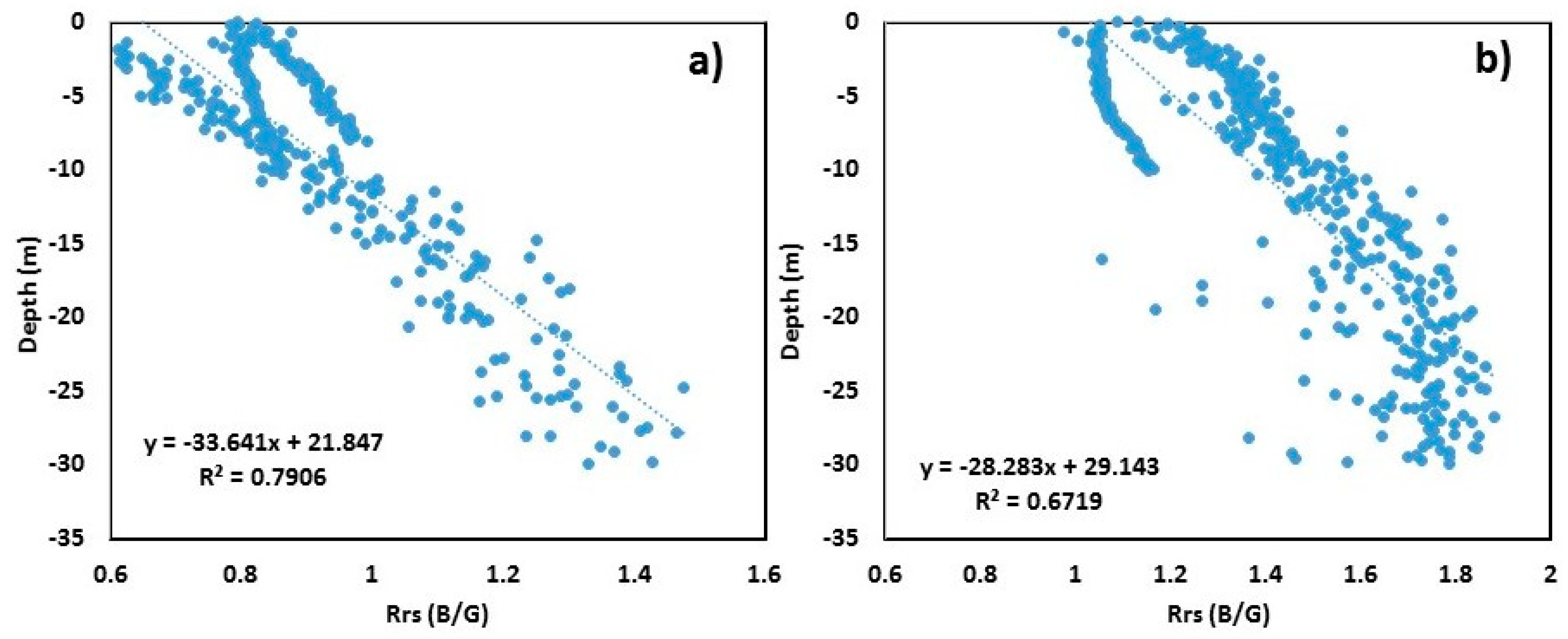
3.4. Combined Bathymetric Model
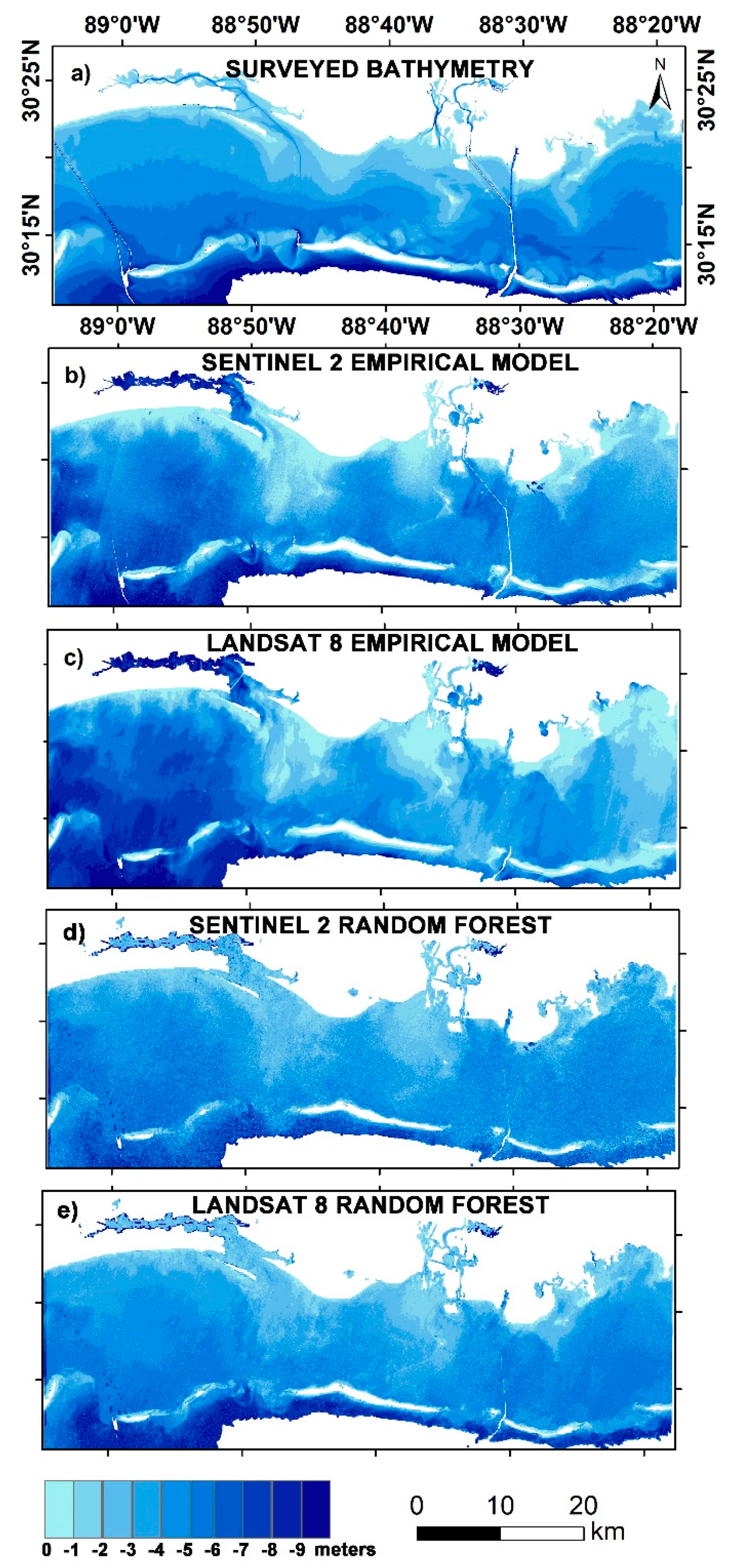
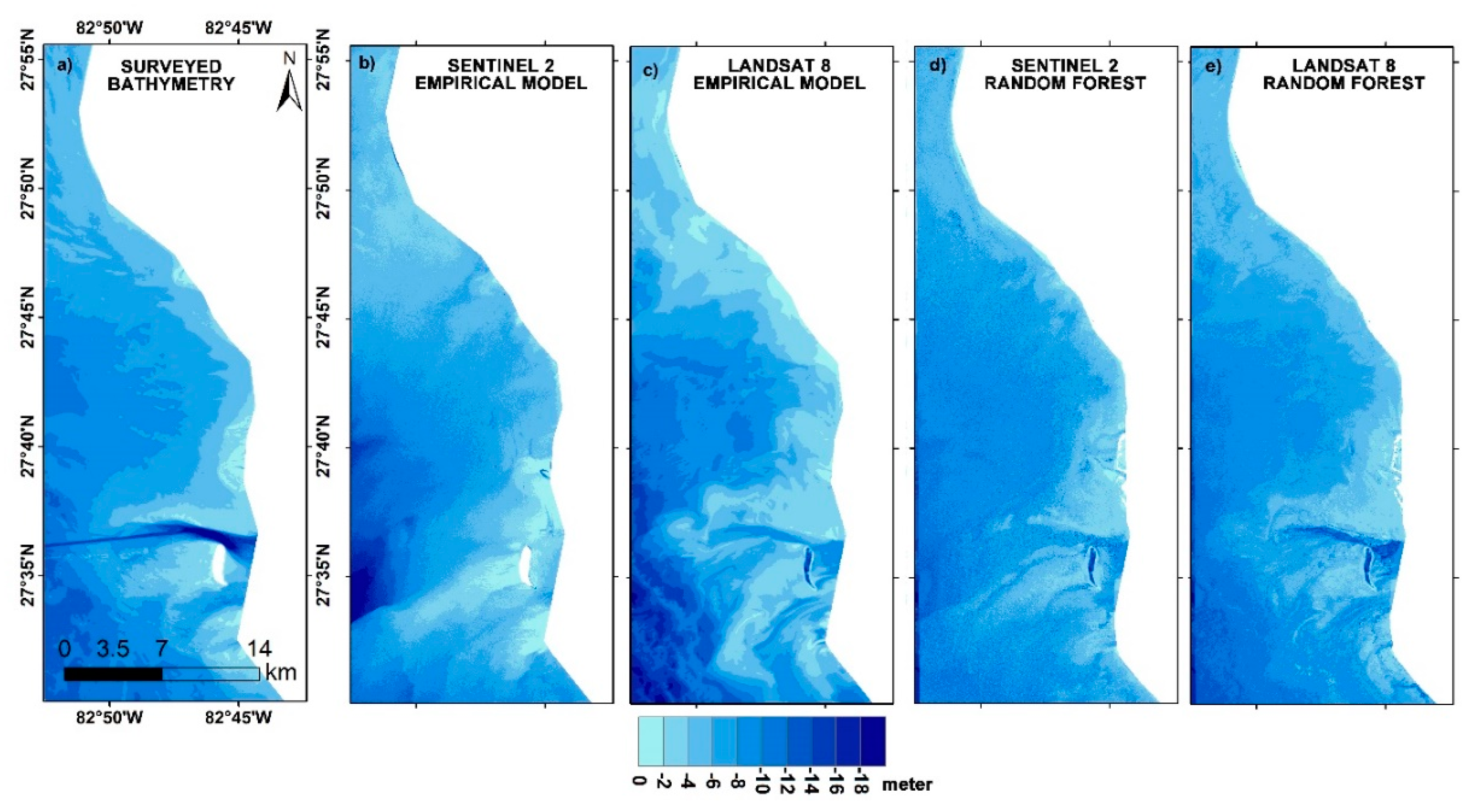
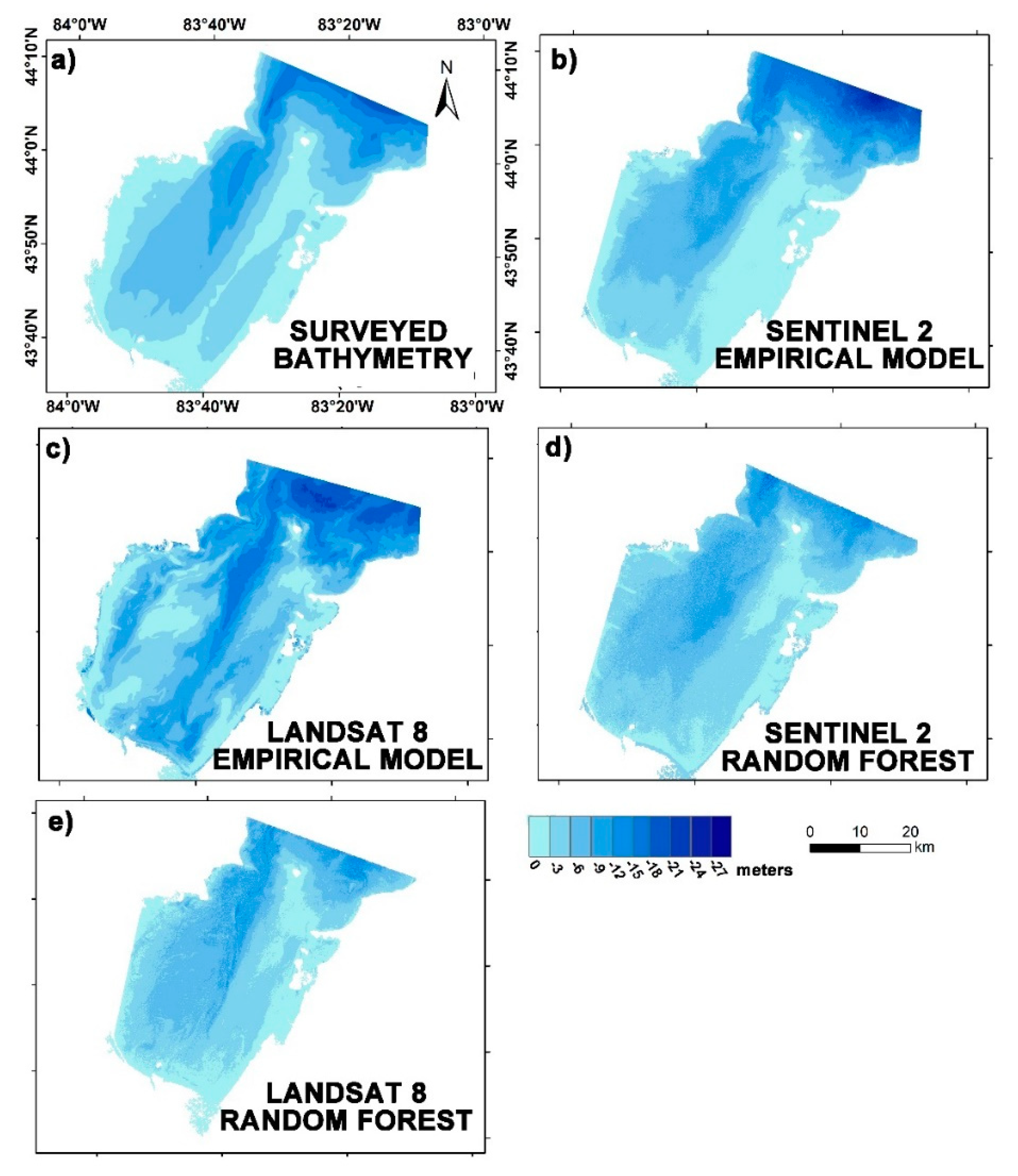
3.5. Bathymetric Mapping
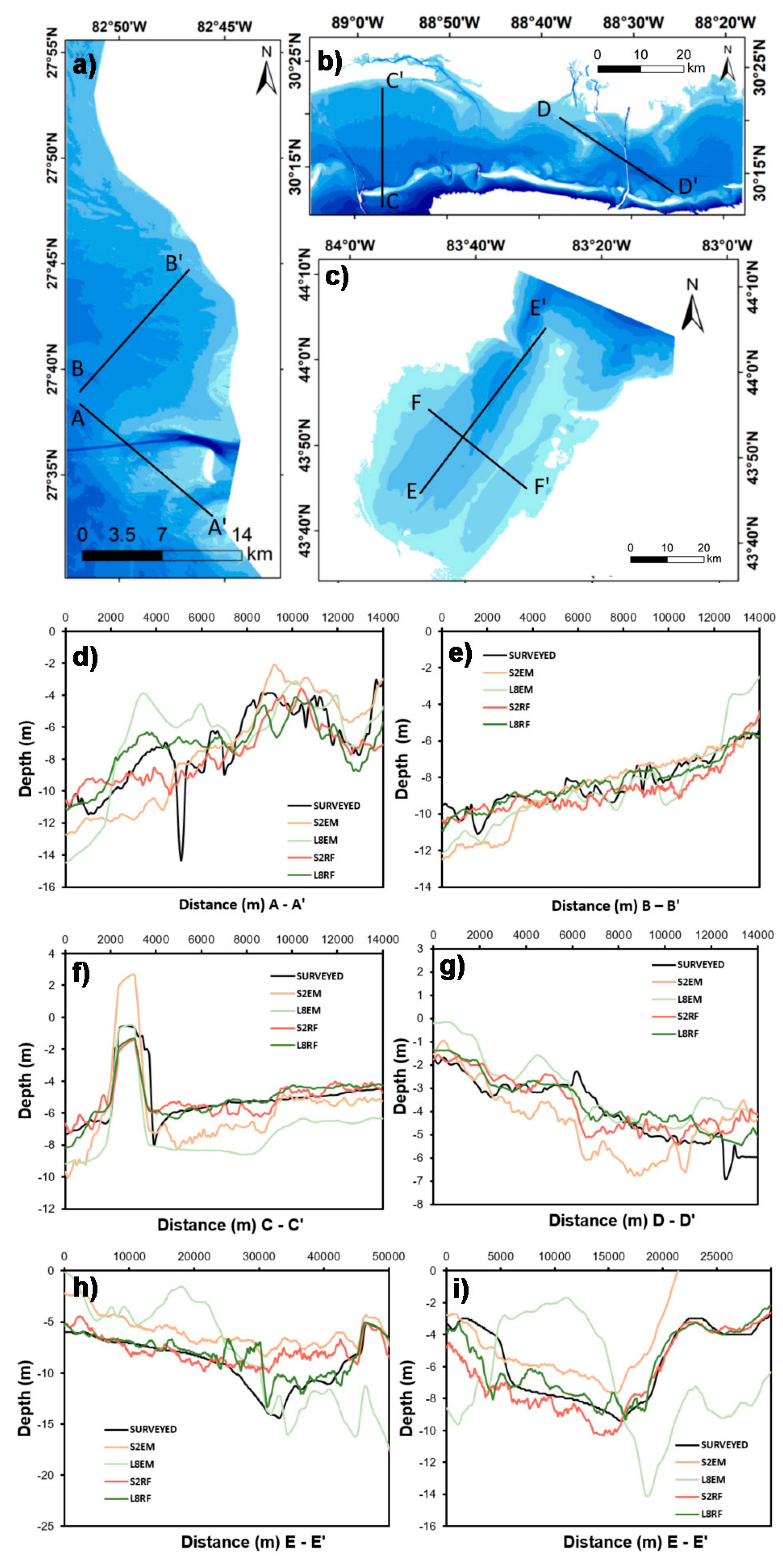
3.6. Bathymetric Profile Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cooper, J.; Navas, F. Natural bathymetric change as a control on century-scale shoreline behavior. Geology 2004, 32, 513–516. [Google Scholar] [CrossRef]
- Clarke, J.E.H. First wide-angle view of channelized turbidity currents links migrating cyclic steps to flow characteristics. Nat. Commun. 2016, 7, 11896. [Google Scholar] [CrossRef] [PubMed]
- Simons, D.; Richardson, E. Resistance to Flow in Alluvial Channels; USGS Professional Paper 422-J; US Government Printing Office: Washington, DC, USA, 1966. [CrossRef]
- Smith, D.P.; Ruiz, G.; Kvitek, R.; Iampietro, P.J. Semiannual patterns of erosion and deposition in upper Monterey Canyon from serial multibeam bathymetry. Gsa Bull. 2005, 117, 1123–1133. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Pacheco, A.; Horta, J.; Loureiro, C.; Ferreira, Ó. Retrieval of nearshore bathymetry from Landsat 8 images: A tool for coastal monitoring in shallow waters. Remote Sens. Environ. 2015, 159, 102–116. [Google Scholar] [CrossRef]
- Maxwell, S.M.; Hazen, E.L.; Lewison, R.L.; Dunn, D.C.; Bailey, H.; Bograd, S.J.; Briscoe, D.K.; Fossette, S.; Hobday, A.J.; Bennett, M.; et al. Dynamic ocean management: Defining and conceptualizing real-time management of the ocean. Mar. Policy 2015, 58, 42–50. [Google Scholar] [CrossRef]
- Kachelriess, D.; Wegmann, M.; Gollock, M.; Pettorelli, N. The application of remote sensing for marine protected area management. Ecol. Indic. 2014, 36, 169–177. [Google Scholar] [CrossRef]
- Monteys, X.; Harris, P.; Caloca, S.; Cahalane, C. Spatial prediction of coastal bathymetry based on multispectral satellite imagery and multibeam data. Remote Sens. 2015, 7, 13782–13806. [Google Scholar] [CrossRef]
- Carron, M.J.; Vogt, P.R.; Jung, W.-Y. A proposed international long-term project to systematically map the world’s ocean floors from beach to trench: GOMaP (Global Ocean Mapping Program). Int. Hydrogr. Rev. 2001, 2, 49–50. [Google Scholar]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Doxani, G.; Papadopoulou, M.; Lafazani, P.; Pikridas, C.; Tsakiri-Strati, M. Shallow-water bathymetry over variable bottom types using multispectral Worldview-2 image. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 159–164. [Google Scholar] [CrossRef]
- Eugenio, F.; Marcello, J.; Martin, J. High-resolution maps of bathymetry and benthic habitats in shallow-water environments using multispectral remote sensing imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3539–3549. [Google Scholar] [CrossRef]
- Evagorou, E.G.; Mettas, C.; Agapiou, A.; Themistocleous, K.; Hadjimitsis, D.G. Bathymetric maps from multi-temporal analysis of Sentinel-2 data: The case study of Limassol, Cyprus. Adv. Geosci. 2019, 45, 397–407. [Google Scholar] [CrossRef]
- Dickens, K.; Armstrong, A. Application of Machine Learning in Satellite Derived Bathymetry and Coastline Detection. SMU Data Sci. Rev. 2019, 2, 4. [Google Scholar]
- Sandwell, D.T.; Smith, W.H.; Gille, S.; Kappel, E.; Jayne, S.; Soofi, K.; Coakley, B.; Géli, L. Bathymetry from space: Rationale and requirements for a new, high-resolution altimetric mission. Comptes Rendus Geosci. 2006, 338, 1049–1062. [Google Scholar] [CrossRef]
- Dixon, T.H.; Naraghi, M.; McNutt, M.; Smith, S. Bathymetric prediction from Seasat altimeter data. J. Geophys. Res. Oceans 1983, 88, 1563–1571. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Assessment of atmospheric correction methods for Landsat TM data applicable to Amazon basin LBA research. Int. J. Remote Sens. 2002, 23, 2651–2671. [Google Scholar] [CrossRef]
- Jena, B.; Kurian, P.; Swain, D.; Tyagi, A.; Ravindra, R. Prediction of bathymetry from satellite altimeter based gravity in the Arabian Sea: Mapping of two unnamed deep seamounts. Int. J. Appl. Earth Obs. Geoinf. 2012, 16, 1–4. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne lidar bathymetry. Digit. Elev. Model Technol. Appl. Dem Users Man. 2007, 2, 253–320. [Google Scholar]
- Bills, B.G.; Borsa, A.A.; Comstock, R.L. MISR-based passive optical bathymetry from orbit with few-cm level of accuracy on the Salar de Uyuni, Bolivia. Remote Sens. Environ. 2007, 107, 240–255. [Google Scholar] [CrossRef]
- Arsen, A.; Crétaux, J.-F.; Berge-Nguyen, M.; del Rio, R. Remote sensing-derived bathymetry of lake Poopó. Remote Sens. 2014, 6, 407–420. [Google Scholar] [CrossRef]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Hodúl, M.; Bird, S.; Knudby, A.; Chénier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Leon, J.X.; Cohen, T. An improved bathymetric model for the modern and palaeo Lake Eyre. Geomorphology 2012, 173, 69–79. [Google Scholar] [CrossRef]
- Clark, R.K.; Fay, T.H.; Walker, C.L. Bathymetry calculations with Landsat 4 TM imagery under a generalized ratio assumption. Appl. Opt. 1987, 26, 4036–4038. [Google Scholar] [CrossRef] [PubMed]
- Bustamante, J.; Pacios, F.; Díaz-Delgado, R.; Aragonés, D. Predictive models of turbidity and water depth in the Doñana marshes using Landsat TM and ETM+ images. J. Environ. Manag. 2009, 90, 2219–2225. [Google Scholar] [CrossRef] [PubMed]
- Lyons, M.; Phinn, S.; Roelfsema, C. Integrating Quickbird multi-spectral satellite and field data: Mapping bathymetry, seagrass cover, seagrass species and change in Moreton Bay, Australia in 2004 and 2007. Remote Sens. 2011, 3, 42–64. [Google Scholar] [CrossRef]
- Mohamed, H.; Negm, A.; Zahran, M.; Saavedra, O.C. Bathymetry determination from high resolution satellite imagery using ensemble learning algorithms in Shallow Lakes: Case study El-Burullus Lake. Int. J. Environ. Sci. Dev. 2016, 7, 295. [Google Scholar] [CrossRef]
- Lesser, M.; Mobley, C. Bathymetry, water optical properties, and benthic classification of coral reefs using hyperspectral remote sensing imagery. Coral Reefs 2007, 26, 819–829. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Overstreet, B.T.; Glennie, C.L.; Pan, Z.; Fernandez-Diaz, J.C.; Singhania, A. Evaluating the capabilities of the CASI hyperspectral imaging system and Aquarius bathymetric LiDAR for measuring channel morphology in two distinct river environments. Earth Surf. Process. Landf. 2016, 41, 344–363. [Google Scholar] [CrossRef]
- Liu, S.; Gao, Y.; Zheng, W.; Li, X. Performance of two neural network models in bathymetry. Remote Sens. Lett. 2015, 6, 321–330. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H.; Su, H.; Wang, J. Bathymetry retrieval from optical images with spatially distributed support vector machines. Gisci. Remote Sens. 2019, 56, 323–337. [Google Scholar] [CrossRef]
- Misra, A.; Vojinovic, Z.; Ramakrishnan, B.; Luijendijk, A.; Ranasinghe, R. Shallow water bathymetry mapping using Support Vector Machine (SVM) technique and multispectral imagery. Int. J. Remote Sens. 2018, 39, 4431–4450. [Google Scholar] [CrossRef]
- Sagawa, T.; Yamashita, Y.; Okumura, T.; Yamanokuchi, T. Satellite Derived Bathymetry Using Machine Learning and Multi-Temporal Satellite Images. Remote Sens. 2019, 11, 1155. [Google Scholar] [CrossRef]
- Dou, J.; Yunus, A.P.; Bui, D.T.; Merghadi, A.; Sahana, M.; Zhu, Z.; Chen, C.-W.; Khosravi, K.; Yang, Y.; Pham, B.T. Assessment of advanced random forest and decision tree algorithms for modeling rainfall-induced landslide susceptibility in the Izu-Oshima Volcanic Island, Japan. Sci. Total Environ. 2019, 662, 332–346. [Google Scholar] [CrossRef] [PubMed]
- Roy, D.P.; Wulder, M.; Loveland, T.R.; Woodcock, C.; Allen, R.; Anderson, M.; Helder, D.; Irons, J.; Johnson, D.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Pope, A.; Scambos, T.A.; Moussavi, M.; Tedesco, M.; Willis, M.; Shean, D.; Grigsby, S. Estimating supraglacial lake depth in West Greenland using Landsat 8 and comparison with other multispectral methods. Cryosphere 2016, 10, 15. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA data mining software: An update. ACM SIGKDD Explor. Newsl. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Fisher, P.F.; Tate, N.J. Causes and consequences of error in digital elevation models. Prog. Phys. Geogr. 2006, 30, 467–489. [Google Scholar] [CrossRef]
- Makboul, O.; Negm, A.; Mesbah, S.; Mohasseb, M. Performance assessment of ANN in estimating remotely sensed extracted bathymetry. Case study: Eastern harbor of alexandria. Procedia Eng. 2017, 181, 912–919. [Google Scholar] [CrossRef]
- Dou, J.; Yamagishi, H.; Pourghasemi, H.R.; Yunus, A.P.; Song, X.; Xu, Y.; Zhu, Z. An integrated artificial neural network model for the landslide susceptibility assessment of Osado Island, Japan. Nat. Hazards 2015, 78, 1749–1776. [Google Scholar] [CrossRef]
- Dou, J.; Chang, K.T.; Chen, S.; Yunus, A.P.; Liu, J.K.; Xia, H.; Zhu, Z. Automatic Case-Based Reasoning Approach for Landslide Detection: Integration of Object-Oriented Image Analysis and a Genetic Algorithm. Remote Sens. 2015, 7, 4318–4342. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-2 | Landsat-8 | |||||||
|---|---|---|---|---|---|---|---|---|
| Band No. | Central Wavelength (nm) | Band Width (nm) | Resolution (m) | Band No. | Central Wavelength (nm) | Band Width (nm) | Resolution (m) | |
| 1 | 443 | 20 | 60 | 1 | 442 | 15 | 30 | |
| 2 | 490 | 65 | 10 | 2 | 482 | 60 | 30 | |
| 3 | 560 | 35 | 10 | 3 | 561 | 57 | 30 | |
| 4 | 665 | 30 | 10 | 4 | 654 | 37 | 30 | |
| 5 | 705 | 15 | 20 | 5 | 864 | 28 | 30 | |
| 6 | 740 | 15 | 20 | 6 | 1608 | 84 | 30 | |
| 7 | 783 | 20 | 20 | 7 | 2200 | 186 | 30 | |
| 8 | 842 | 115 | 10 | 8 | 589 | 172 | 15 | |
| 8b | 865 | 20 | 20 | 9 | 1373 | 20 | 30 | |
| 9 | 945 | 20 | 60 | 10 | 1089 | 59 | 100 | |
| 10 | 1380 | 30 | 60 | 11 | 1200 | 101 | 100 | |
| 11 | 1610 | 90 | 20 | |||||
| 12 | 2190 | 180 | 20 | |||||
| Dates of acquisition S2 and L8 scenes | ||||||||
| Mobile Bay | 4 January 2016 Tile No. T16RCU | 23 April 2016 Path 21 Row 39 | ||||||
| Tampa Bay | 14 February 2016 Tile No. T17RLL | 20 February 2015 Path 17 Row 41 | ||||||
| Lake Huron | 29 June 2016 Tile No. T16TGP | 16 April 2016 Path 20 Row 30 | ||||||
| Mobile Bay | |||||||
| Empirical Model | Random Forest | ||||||
| Surveyed | S2 SSA | S2 IM | L8 SSA | L8 IM | S2 RF | L8 RF | |
| RMSE | 2.26 | 4.84 | 2.54 | 5.18 | 1.49 | 1.13 | |
| MAX | −10.00 | −13.32 | −14.48 | −10. 0 | −13.94 | −9.55 | −9.43 |
| MIN | 0.00 | 3.92 | 6.25 | −0.40 | 5.45 | −0.56 | −0.45 |
| MEAN | −4.58 | −5.51 | −9.21 | −5.39 | −9.28 | −4.42 | −4.64 |
| STD | 2.20 | 2.79 | 1.78 | 2.71 | 2.25 | 1.66 | 1.89 |
| MAE | 0.93 | 4.63 | 0.81 | 4.70 | 1.10 | 0.77 | |
| Tampa Bay | |||||||
| Empirical Model | Random Forest | ||||||
| Surveyed | S2 SSA | S2 IM | L8 SSA | L8 IM | S2 RF | L8 RF | |
| RMSE | 2.80 | 2.62 | 2.50 | 5.67 | 1.95 | 1.45 | |
| MAX | −29.63 | −32.63 | −14.80 | −19.87 | −7.58 | −18.39 | −20.83 |
| MIN | 0.00 | 10.36 | 3.93 | 4.09 | 2.68 | −0.55 | −0.70 |
| MEAN | −7.46 | −6.88 | −6.37 | −7.22 | −2.16 | −7.43 | −7.43 |
| STD | 2.82 | 3.25 | 1.06 | 3.73 | 1.59 | 2.17 | 2.37 |
| MAE | 0.58 | 1.09 | 0.24 | 5.30 | 1.25 | 0.86 | |
| Lake Huron | |||||||
| Empirical Model | Random Forest | ||||||
| Surveyed | S2 SSA | S2 IM | L8 SSA | L8 IM | S2 RF | L8 RF | |
| RMSE | 1.99 | 3.30 | 4.74 | 5.07 | 1.44 | 1.38 | |
| MAX | −18.79 | −17.07 | −18.68 | −22.19 | −20.50 | −19.38 | −15.10 |
| MIN | 0.00 | 9.55 | 9.87 | 7.30 | 5.06 | −0.78 | −0.10 |
| MEAN | −5.30 | −2.61 | −4.93 | −7.55 | −9.38 | −5.56 | −5.21 |
| STD | 3.28 | 4.25 | 6.78 | 4.90 | 4.25 | 2.80 | 2.85 |
| MAE | 0.07 | 2.22 | 0.79 | 2.23 | 0.96 | 0.93 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors 2019, 19, 2788. https://doi.org/10.3390/s19122788
Yunus AP, Dou J, Song X, Avtar R. Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors. 2019; 19(12):2788. https://doi.org/10.3390/s19122788
Chicago/Turabian StyleYunus, Ali P., Jie Dou, Xuan Song, and Ram Avtar. 2019. "Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images" Sensors 19, no. 12: 2788. https://doi.org/10.3390/s19122788
APA StyleYunus, A. P., Dou, J., Song, X., & Avtar, R. (2019). Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors, 19(12), 2788. https://doi.org/10.3390/s19122788