Corrections of BDS Code Multipath Error in Geostationary Orbit Satellite and Their Application in Precise Data Processing



Abstract
1. Introduction
2. Mathematical Models
2.1. Multipath Combination
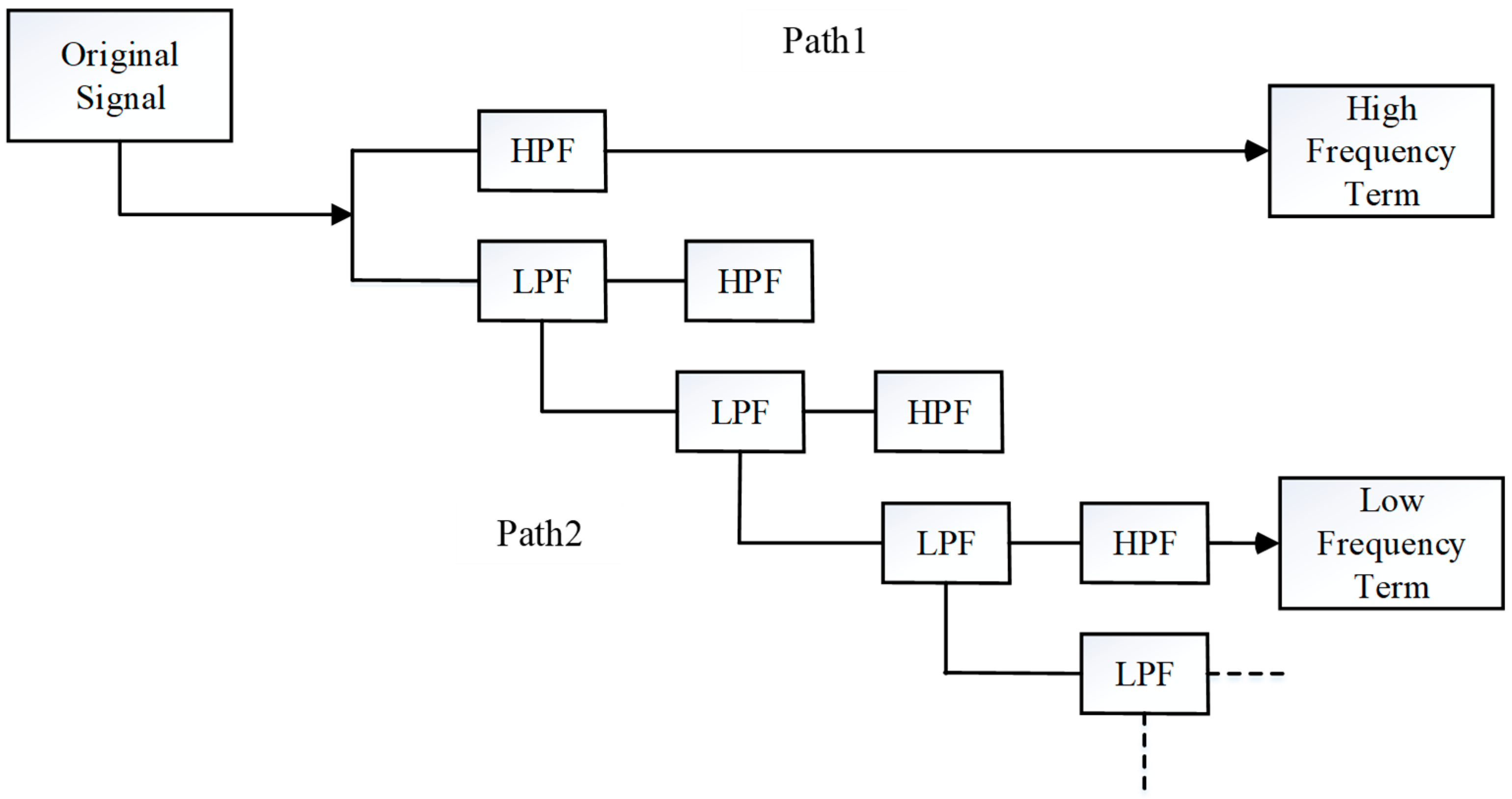
2.2. Wavelet Transform
3. Experimental Analysis
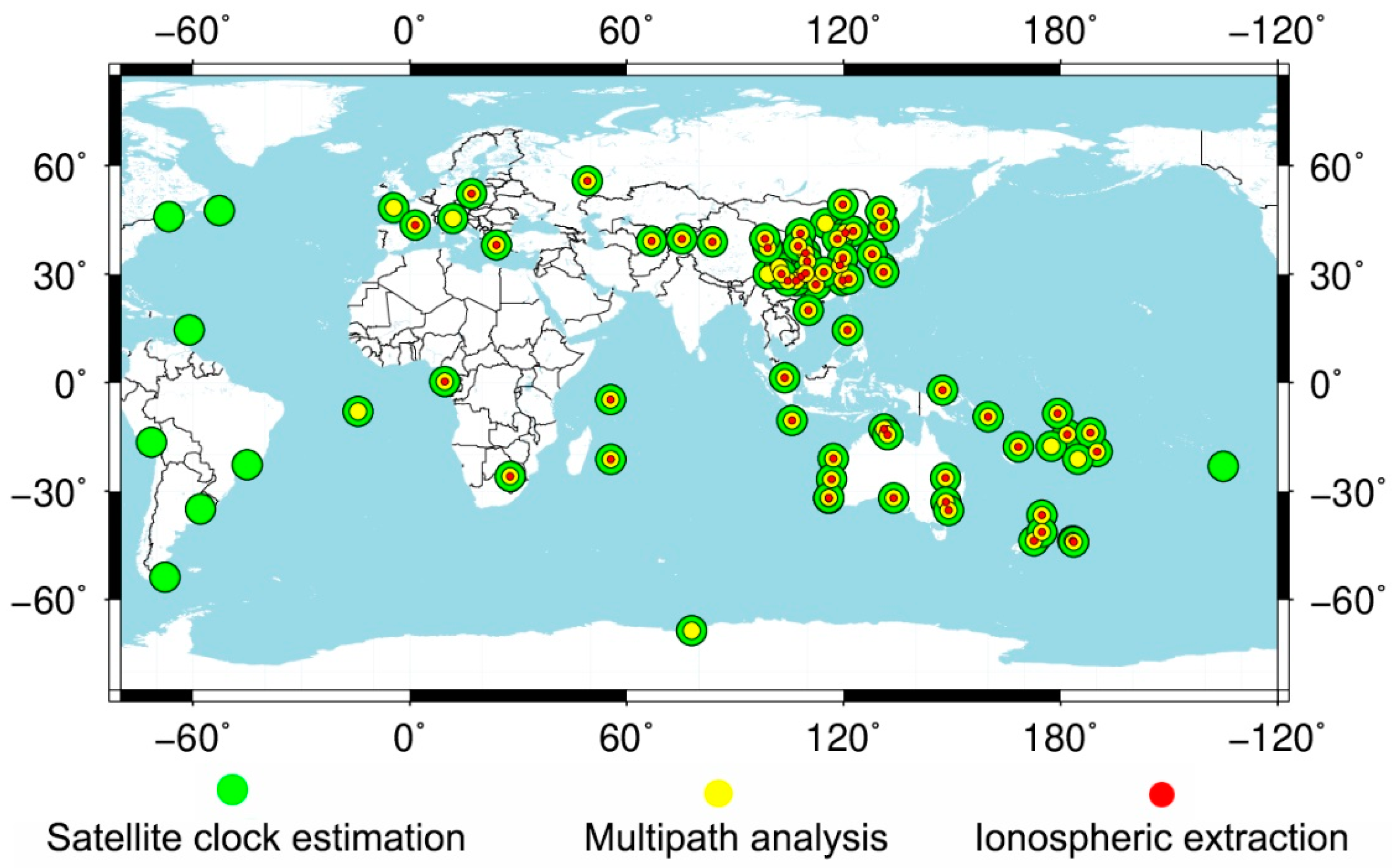
3.1. Data Collection and Processing Strategy
3.2. GEO Satellite Multipath Calibration and Elimination
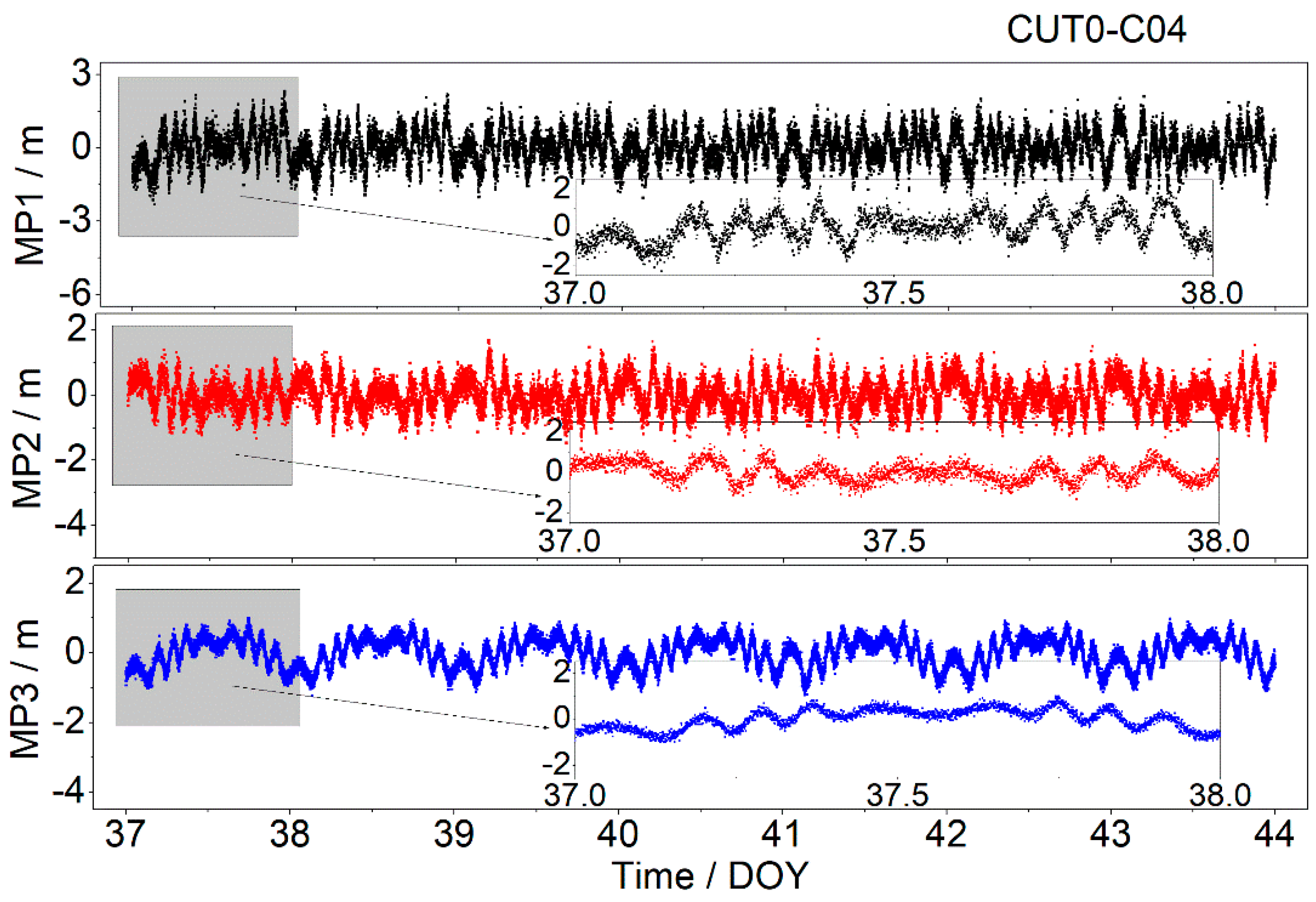
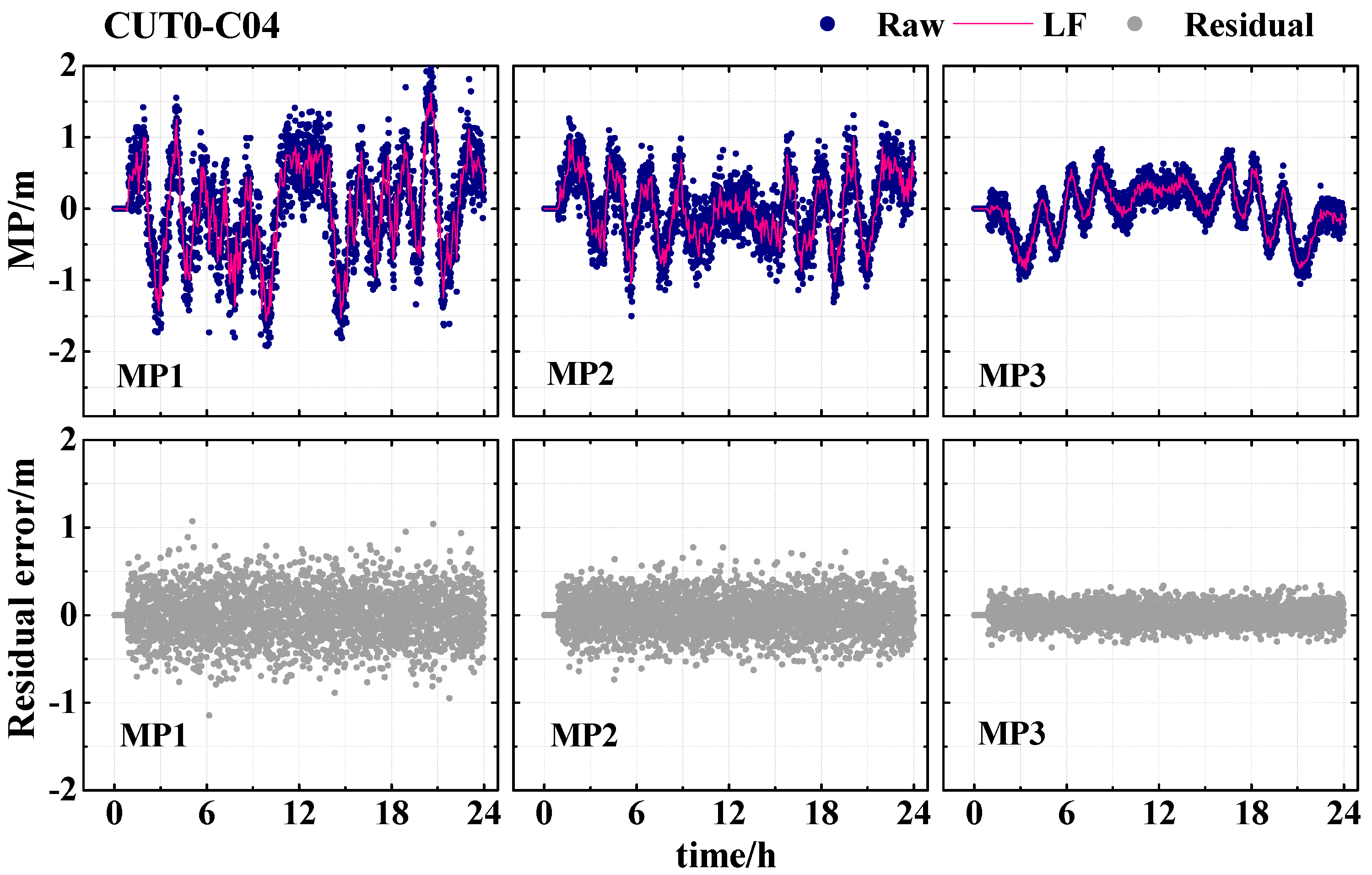
3.2.1. Multipath Calibration
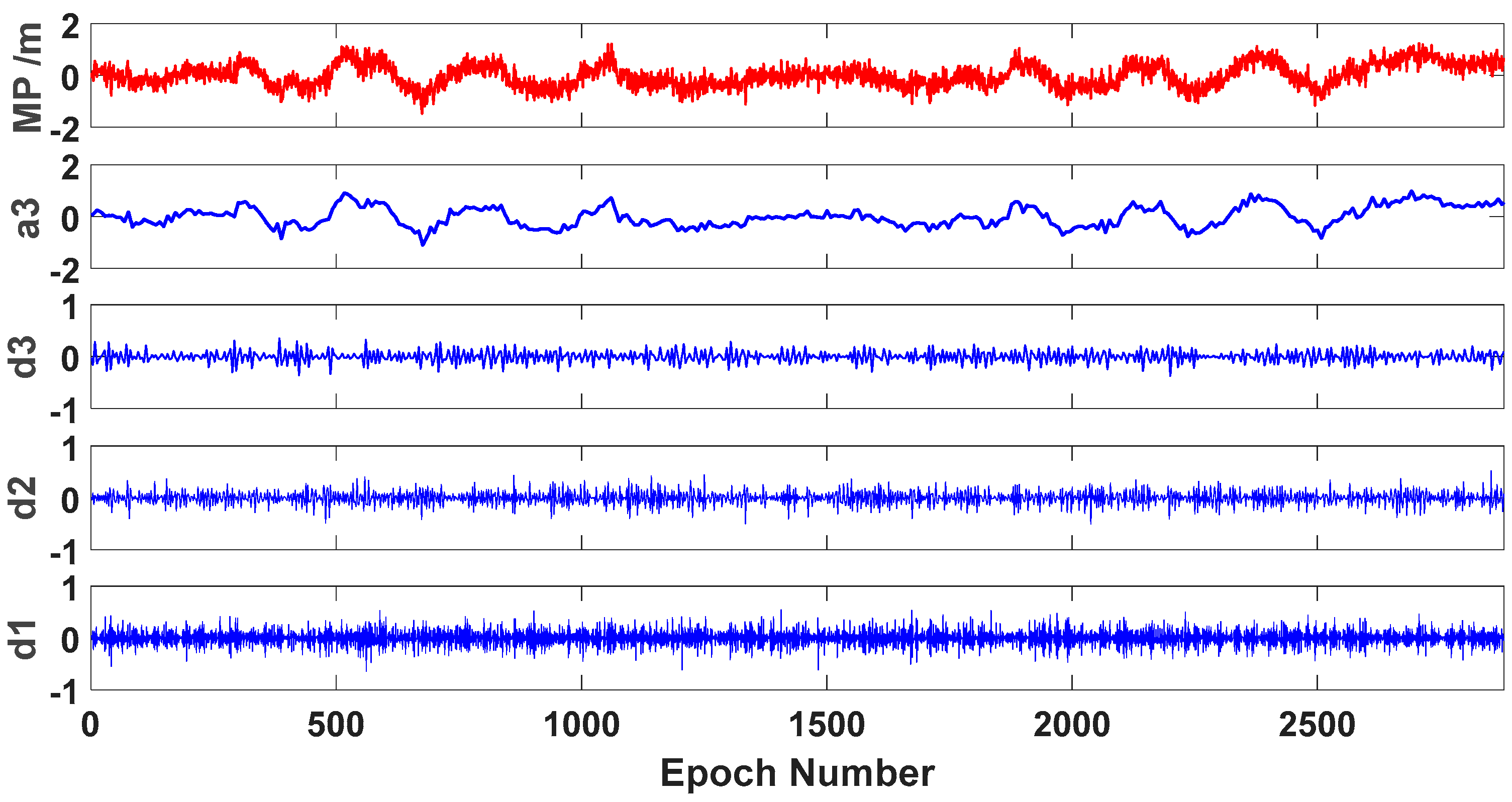
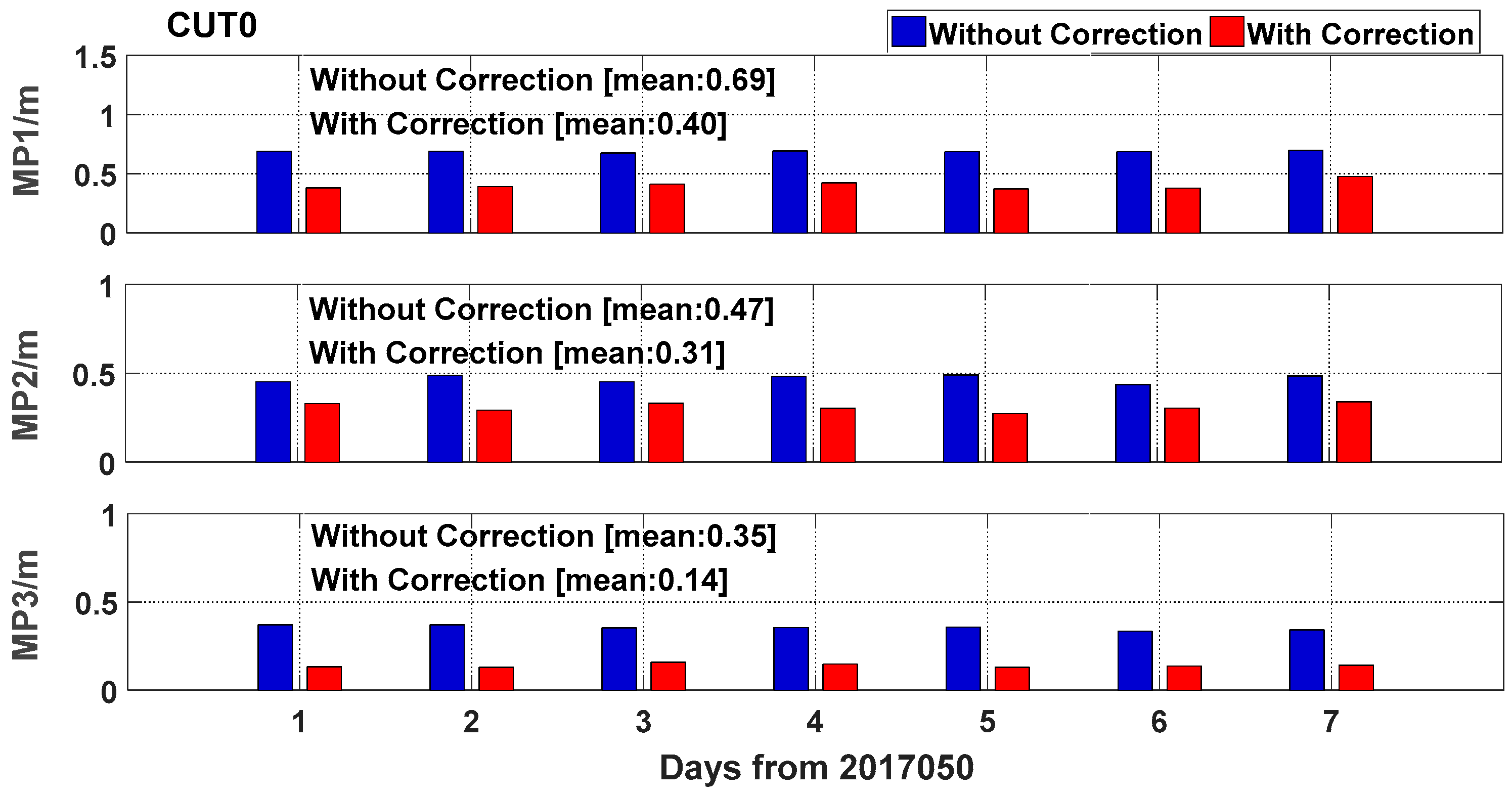
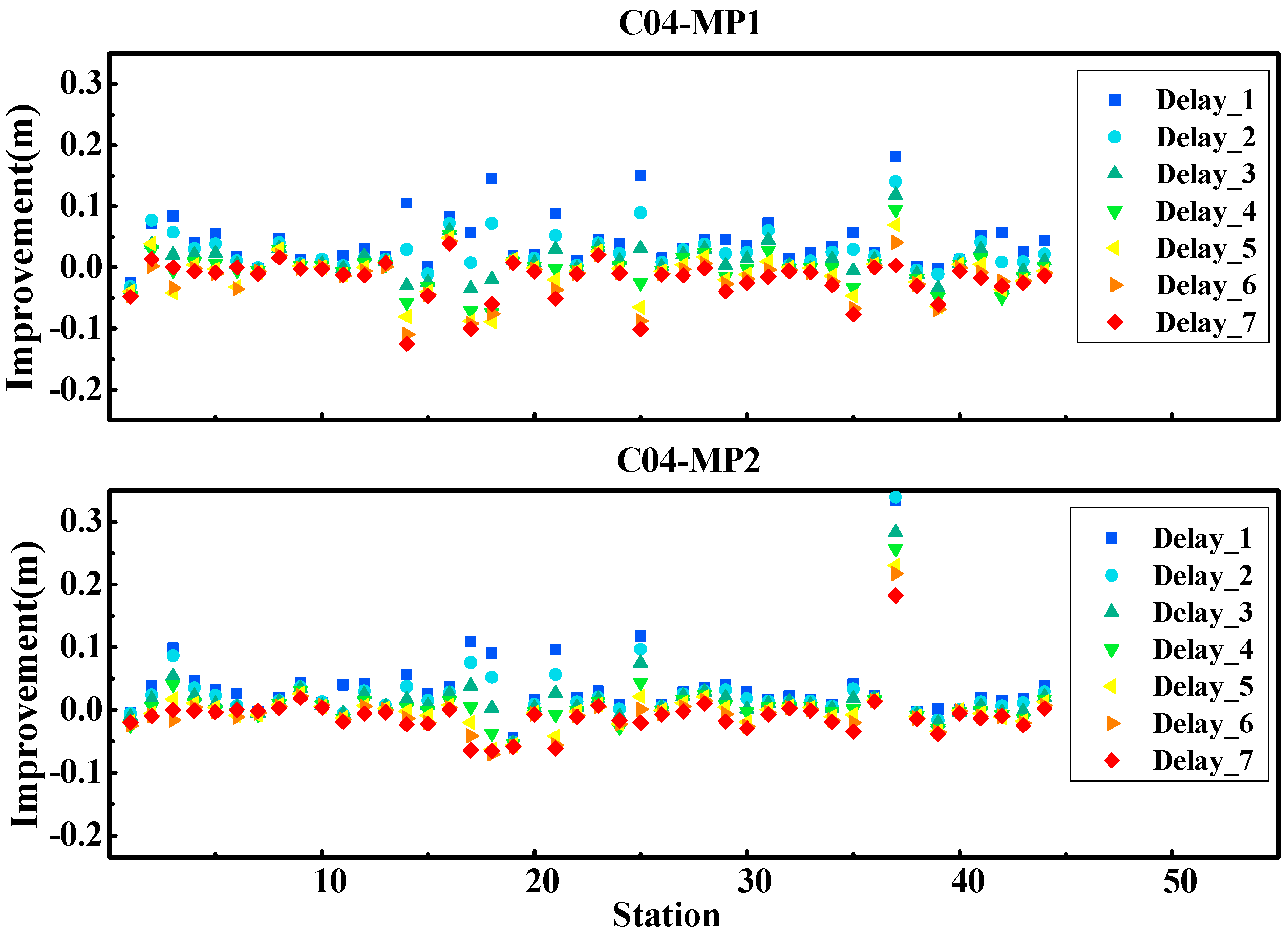
3.2.2. Multipath Elimination
3.3. Validation of BDS Precise Data Processing
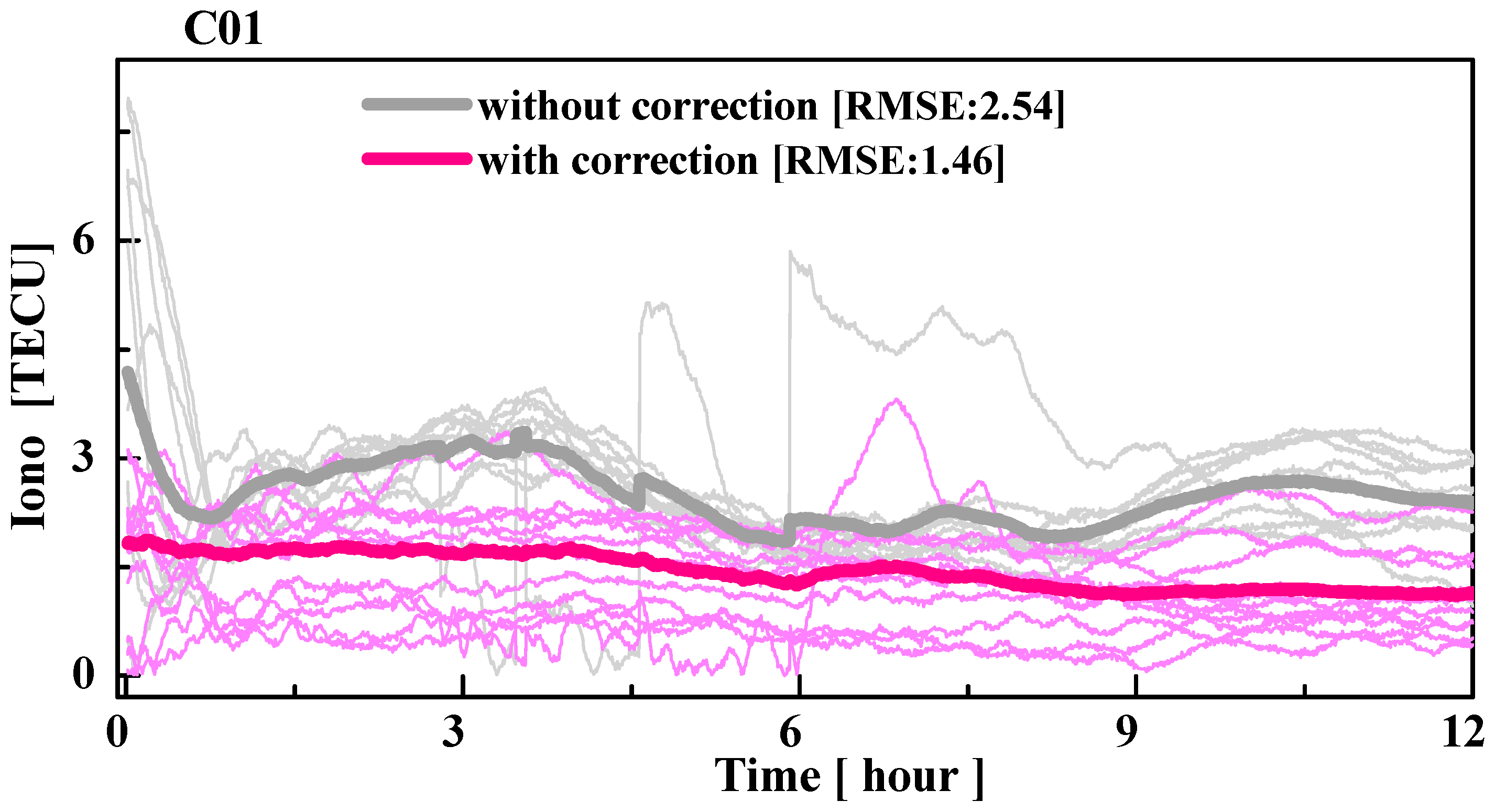
3.3.1. Ionospheric Delay Extraction
3.3.2. Satellite Clock Estimation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Geng, J.; Bock, Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geod. 2013, 87, 449–460. [Google Scholar] [CrossRef]
- Shi, J.; Huang, Y.; Ouyang, C.; Lu, X.; Xu, C. BeiDou/GPS relative kinematic positioning in challenging environments including poor satellite visibility and high receiver velocity. Surv. Rev. 2018. [Google Scholar] [CrossRef]
- Albéri, M.; Baldoncini, M.; Bottardi, C.; Chiarelli, E.; Fiorentini, G.; Raptis, K.G.; Realini, E.; Reguzzoni, M.; Rossi, L.; Sampietro, D.; et al. Accuracy of Flight Altitude Measured with Low-Cost GNSS, Radar and Barometer Sensors: Implications for Airborne Radiometric Surveys. Sensors 2017, 17, 1889. [Google Scholar] [CrossRef] [PubMed]
- Cai, C.; Gao, Y.; Pan, L.; Dai, W. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar] [CrossRef]
- Zhang, B.; Ou, J.; Yuan, Y.; Li, Z. Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci. Chin. Earth Sci. 2012, 55, 1919–1928. [Google Scholar] [CrossRef]
- Bishop, G.J.; Klobuchar, J.A.; Doherty, P.H. Multipath effects on the determination of absolute ionospheric time delay from GPS signals. Radio Sci. 1985, 20, 388–396. [Google Scholar] [CrossRef]
- Ciraolo, L.; Azpilicueta, F.; Brunini, C.; Meza, A.; Radicella, S. Calibration errors on experimental slant total electron content (TEC) determined with GPS. J. Geod. 2007, 81, 111–120. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Guo, F. Satellite clock estimation at 1 HZ for realtime kinematic PPP applications. GPS Solut. 2011, 15, 315–324. [Google Scholar] [CrossRef]
- Ge, M.; Chen, J.; Dousa, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2012, 16, 9–17. [Google Scholar] [CrossRef]
- Ye, S.; Zhao, L.; Song, J.; Chen, D.; Jiang, W. Analysis of estimated satellite clock biases and their effects on precise point positioning. GPS Solut. 2018, 22, 16. [Google Scholar] [CrossRef]
- Xia, L.; Liu, J.; Zhang, S.; Deng, Y. Analysis on code multipath mitigation by phase-aided smoothing. Geo-Spat. Inf. Sci. 1999, 2, 73–77. [Google Scholar] [CrossRef]
- Satirapod, C.; Rizos, C. Multipath Mitigation by Wavelet Analysis for GPS Base Station Applications. Surv. Rev. 2005, 38, 2–10. [Google Scholar] [CrossRef]
- Souza, E.M.; Monico, J.F.G.; Polezel, W.G.C.; Pagamisse, A. An effective wavelet method to detect and mitigate low-frequency multipath effects. In VI Hotine-Marussi Symposium of Theoretical and Computational Geodesy, International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2008; Volume 132, pp. 179–184. [Google Scholar] [CrossRef]
- Azarbad, M.; Mosavi, M. A new method to mitigate multipath error in single-frequency GPS receiver with wavelet transform. GPS Solut. 2014, 18, 189–198. [Google Scholar] [CrossRef]
- Comp, C.; Axelrad, P. Adaptive SNR based carrier phase multipath mitigation technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 264–276. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.; Axelrad, P. Modeling GPS phase multipath with SNR: Case study from the Salar de Uyuni, Boliva. J. Geophys. Res. Solid Earth 2008, 113, B04401. [Google Scholar] [CrossRef]
- Strode, P.; Groves, P. GNSS Multipath Detection Using Three-frequency Signal-to-noise Measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef]
- Owen, S.; Webb, F. Impact of GPS Satellite Antenna Phase Center Variations and Modified Sidereal Filtering on Reference Frame Determination. Am. Geophys. Union 2005, 86, 145–158. [Google Scholar]
- Choi, K.; Bilich, A.; Larson, K.M.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, 178–198. [Google Scholar] [CrossRef]
- Zhong, P.; Ding, X.; Zheng, D.; Chen, W.; Huang, D. Adaptive wavelet transform based on cross-validation method and its application to GPS multipath mitigation. GPS. Solut. 2008, 12, 109–117. [Google Scholar] [CrossRef]
- Wu, X.; Zhou, J.; Wang, G.; Hu, X.; Cao, Y. Multipath error detection and correction for GEO/IGSO satellites. Sci. Chin. Phys. Mech. Astron. 2012, 55, 1297–1306. [Google Scholar] [CrossRef]
- Zhang, F.; He, H.; Tang, B.; Shen, F.; Chen, R. Analysis of signal characteristics and positioning performance affected by pseudo range multipath for COMPASS. In China Satellite Navigation Conference (CSNC) 2013 Proceedings; Lecture Notes in Electrical Engineering; Sun, J., Jiao, W., Wu, H., Shi, C., Eds.; Springer: Berlin, Germany, 2013; Volume 243, pp. 493–503. [Google Scholar] [CrossRef]
- Ma, X.; Shen, Y. Multipath error analysis of COMPASS triple frequency observations. Positioning 2014, 5, 12–21. [Google Scholar] [CrossRef][Green Version]
- Wu, P.; Lian, B.; Song, Y.; Yue, Z. Study on Multipath Effect of GEO Satellite in BeiDou Navigation Satellite System. In China Satellite Navigation Conference (CSNC) 2016 Proceedings; Lecture Notes in Electrical Engineering; Springer: Singapore, 2016; Volume 390, pp. 347–358. [Google Scholar] [CrossRef]
- Wang, G.; Jong, K.; Zhao, Q.; Hu, Z.; Guo, J. Multipath analysis of code measurements for BeiDou geostationary satellites. GPS. Solut. 2014, 19, 129–139. [Google Scholar] [CrossRef]
- Wang, M.; Chai, H.; Liu, J.; Zeng, A. BDS relative static positioning over long baseline improved by GEO multipath mitigation. Adv. Space Res. 2016, 57, 782–793. [Google Scholar] [CrossRef]
- Estey, L.; Meertens, C. TEQC: the multi-purpose toolkit for GPS/GLONASS data. GPS. Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Collin, F.; Warnant, R. Application of the Wavelet Transform for GPS Cycle Slip Correction and Comparison with Kalman Filter. Manuscr. Geod. 1993, 20, 161–172. [Google Scholar] [CrossRef]
- Satirapod, C.; Ogaja, C.; Wang, J.; Rizos, C. An approach to GPS analysis incorporating wavelet decomposition. Artif. Satell. 2001, 36, 27–35. [Google Scholar]
- Daubechies, I.; Heil, C. Ten Lectures on Wavelets; SIAM: Philadelphia, PA, USA, 1992; p. 357. [Google Scholar] [CrossRef]
- Souza, E.; Monico, J. Wavelet Shrinkage: High frequency multipath reduction from GPS relative positioning. GPS. Solut. 2004, 8, 152–159. [Google Scholar] [CrossRef]
- Dow, J.; Neilan, R.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Shi, C.; Zheng, F.; Lou, Y.; Gu, S.; Zhang, W.; Dai, X.; Li, X.; Guo, H.; Gong, X. National BDS Augmentation Service System (NBASS) of China: Progress and Assessment. Remote Sens. 2017, 9, 837. [Google Scholar] [CrossRef]
- Noll, C.E. The Crustal Dynamics Data Information System: A resource to support scientific analysis using space geodesy. Adv. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. Navig. J. Inst. Navig. 2014, 61, 191–201. [Google Scholar] [CrossRef]
- Gong, X.; Gu, S.; Lou, Y.; Zheng, F.; Ge, M.; Liu, J. An efficient solution of real-time data processing for multi-GNSS network. J. Geod. 2018, 92, 797–809. [Google Scholar] [CrossRef]
- Uhlemann, M.; Gendt, G.; Ramatschi, M.; Deng, Z. GFZ global multi-GNSS network and data processing results. In IAG 150 Years, International Association of Geodesy Symposia; Rizos, C., Willis, P., Eds.; Springer: Berlin, Germany, 2016; Volume 143, pp. 673–679. [Google Scholar] [CrossRef]
- Cohen, A.; KovaČeviĆ, J. Wavelets: The mathematical background. Proc. IEEE 1996, 84, 514–522. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Without Correction | With Correction | |||||
|---|---|---|---|---|---|---|
| MP1 | MP2 | MP3 | MP1 | MP2 | MP3 | |
| C01 | 0.24 | 0.21 | 0.25 | 0.20 | 0.17 | 0.23 |
| C02 | 0.24 | 0.20 | 0.24 | 0.19 | 0.15 | 0.22 |
| C03 | 0.19 | 0.16 | 0.25 | 0.16 | 0.13 | 0.23 |
| C04 | 0.25 | 0.20 | 0.26 | 0.20 | 0.16 | 0.24 |
| C05 | 0.20 | 0.17 | 0.33 | 0.16 | 0.14 | 0.31 |
| Ave. | 0.23 | 0.19 | 0.27 | 0.18 | 0.15 | 0.25 |
| Without Corrections [TECU] | With Corrections [TECU] | Site Number | |
|---|---|---|---|
| C01 | 2.05 | 1.76 | 43 |
| C02 | 1.86 | 1.65 | 32 |
| C03 | 1.08 | 0.91 | 29 |
| C04 | 2.82 | 2.33 | 24 |
| C05 | 2.35 | 1.91 | 19 |
| Ave. | 2.03 | 1.71 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, W.; Wu, Q.; Gong, X.; Zheng, F.; Lou, Y. Corrections of BDS Code Multipath Error in Geostationary Orbit Satellite and Their Application in Precise Data Processing. Sensors 2019, 19, 2737. https://doi.org/10.3390/s19122737
Song W, Wu Q, Gong X, Zheng F, Lou Y. Corrections of BDS Code Multipath Error in Geostationary Orbit Satellite and Their Application in Precise Data Processing. Sensors. 2019; 19(12):2737. https://doi.org/10.3390/s19122737
Chicago/Turabian StyleSong, Weiwei, Qiong Wu, Xiaopeng Gong, Fu Zheng, and Yidong Lou. 2019. "Corrections of BDS Code Multipath Error in Geostationary Orbit Satellite and Their Application in Precise Data Processing" Sensors 19, no. 12: 2737. https://doi.org/10.3390/s19122737
APA StyleSong, W., Wu, Q., Gong, X., Zheng, F., & Lou, Y. (2019). Corrections of BDS Code Multipath Error in Geostationary Orbit Satellite and Their Application in Precise Data Processing. Sensors, 19(12), 2737. https://doi.org/10.3390/s19122737