Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device


 ,
,  ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
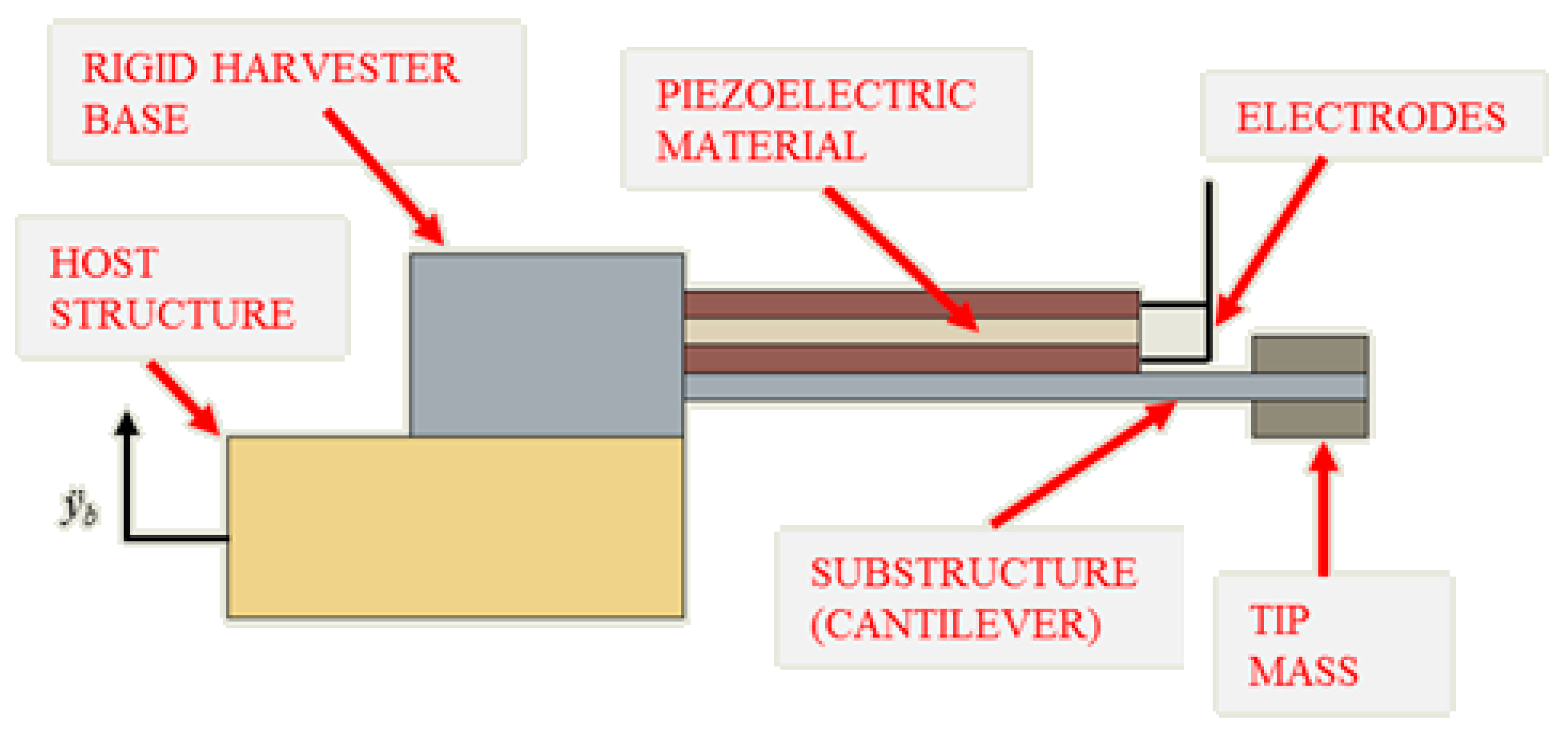
2. Piezoelectric Energy Harvesting Device Description
3. Numerical Bridge Model and Frequency Changes Due to Scour
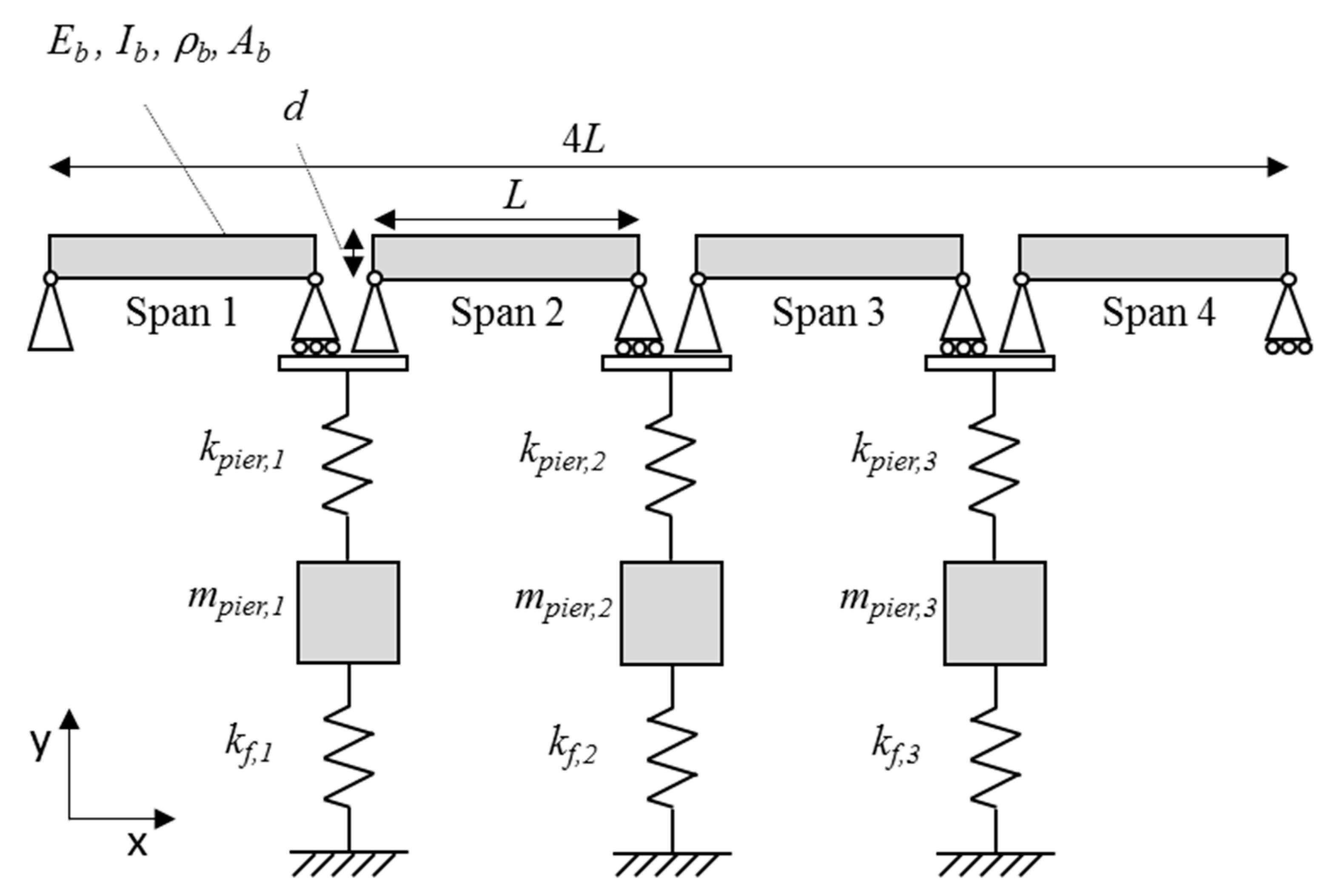
3.1. Scaled Bridge with Four Simple Spans
3.2. Scour Modelling and Frequency Changes of System Due to Scour
4. Experimental Description
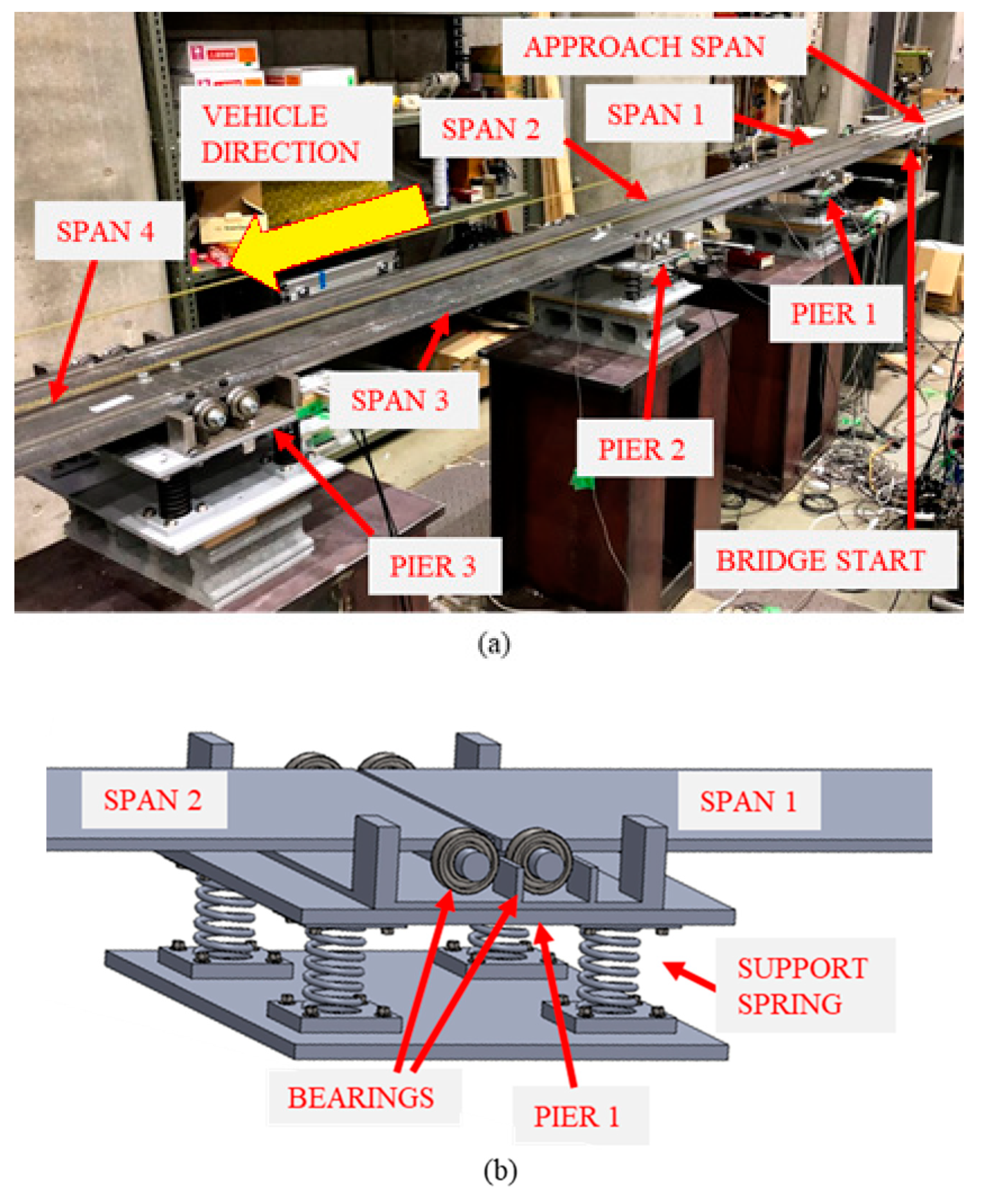
4.1. Experimental Bridge
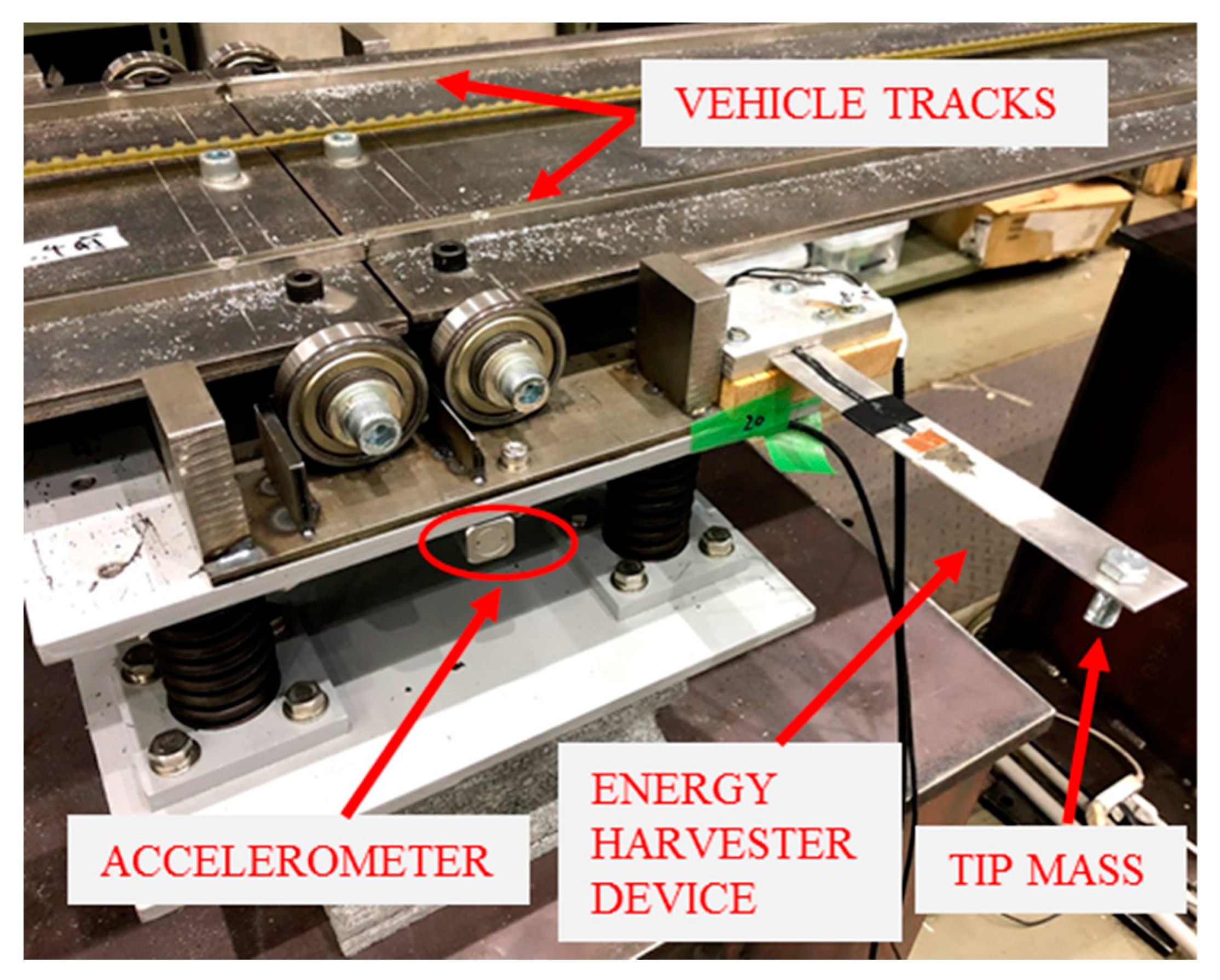
4.2. Energy Harvesting Device (EHD)
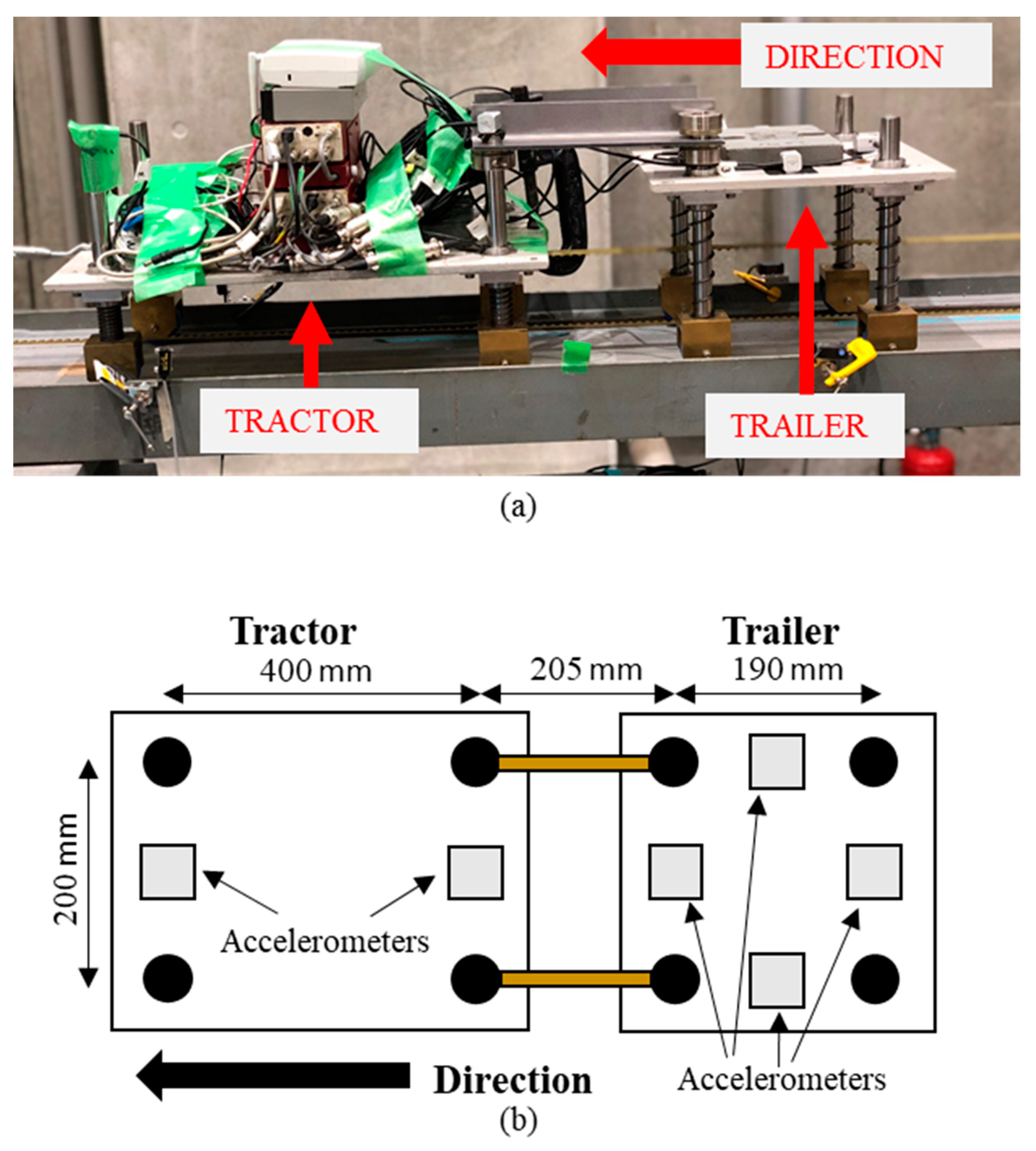
4.3. Vehicle
5. Experimental Results
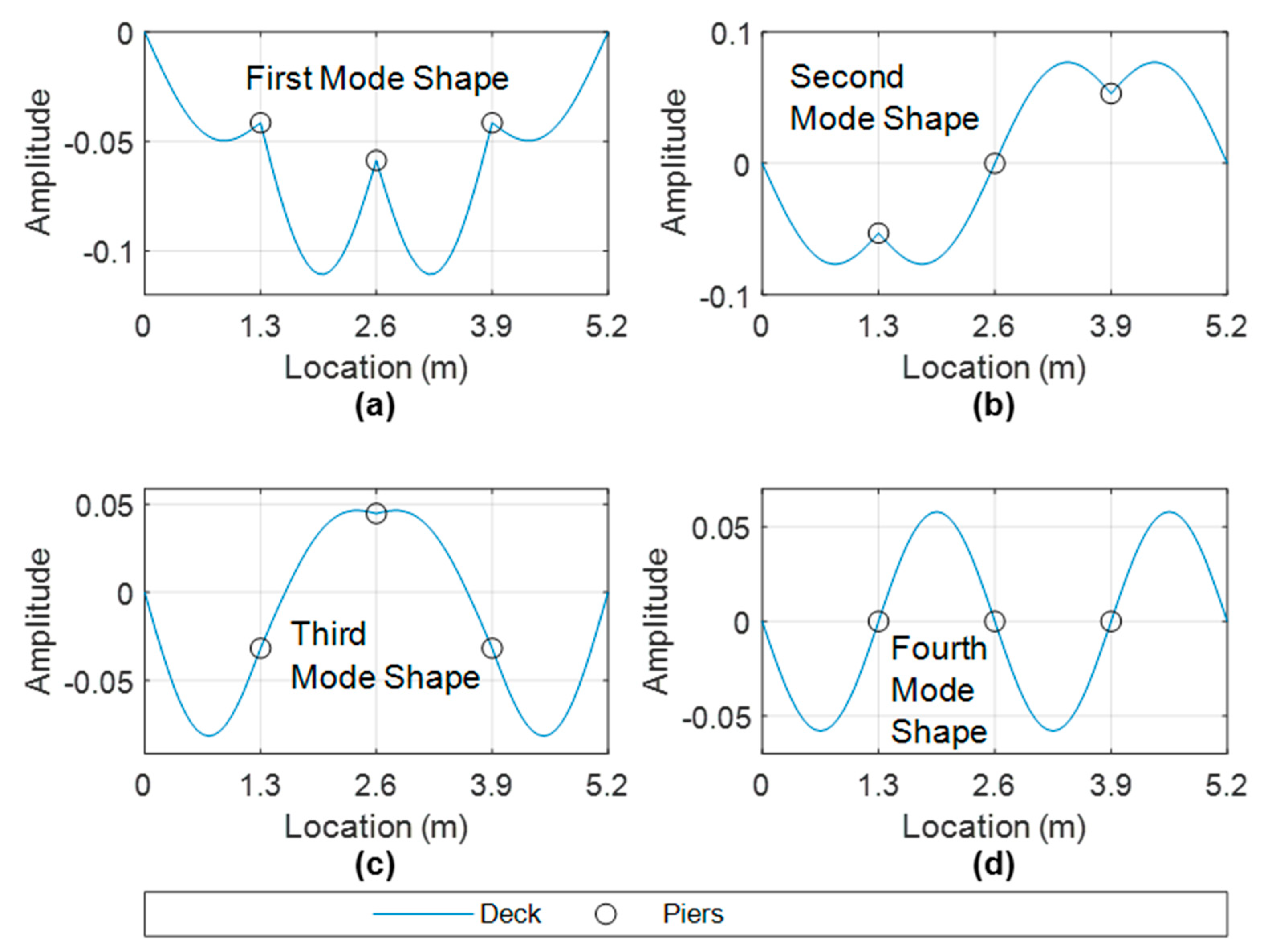
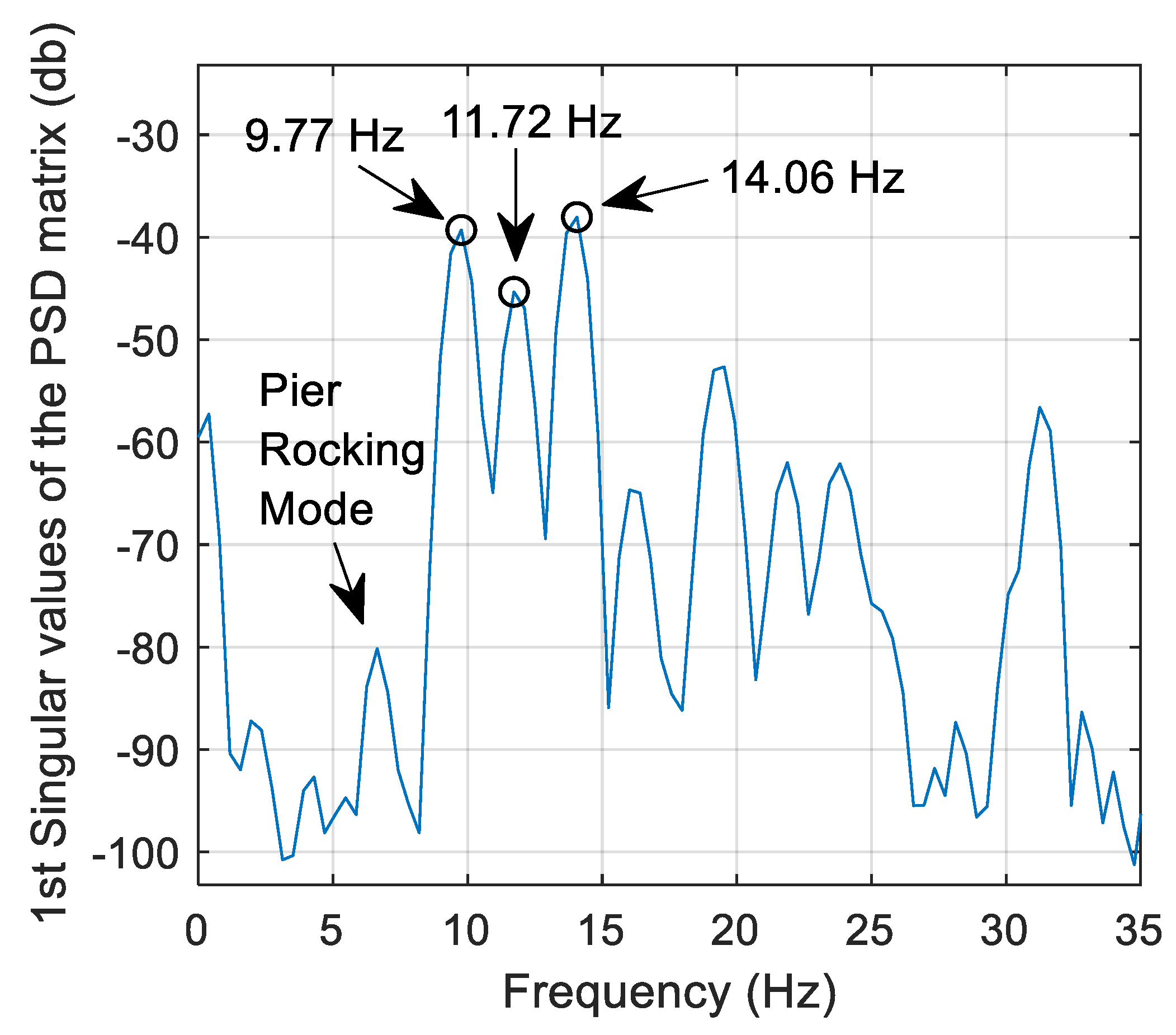
5.1. Mode Shapes of Structure Extracted from Acceleration Data
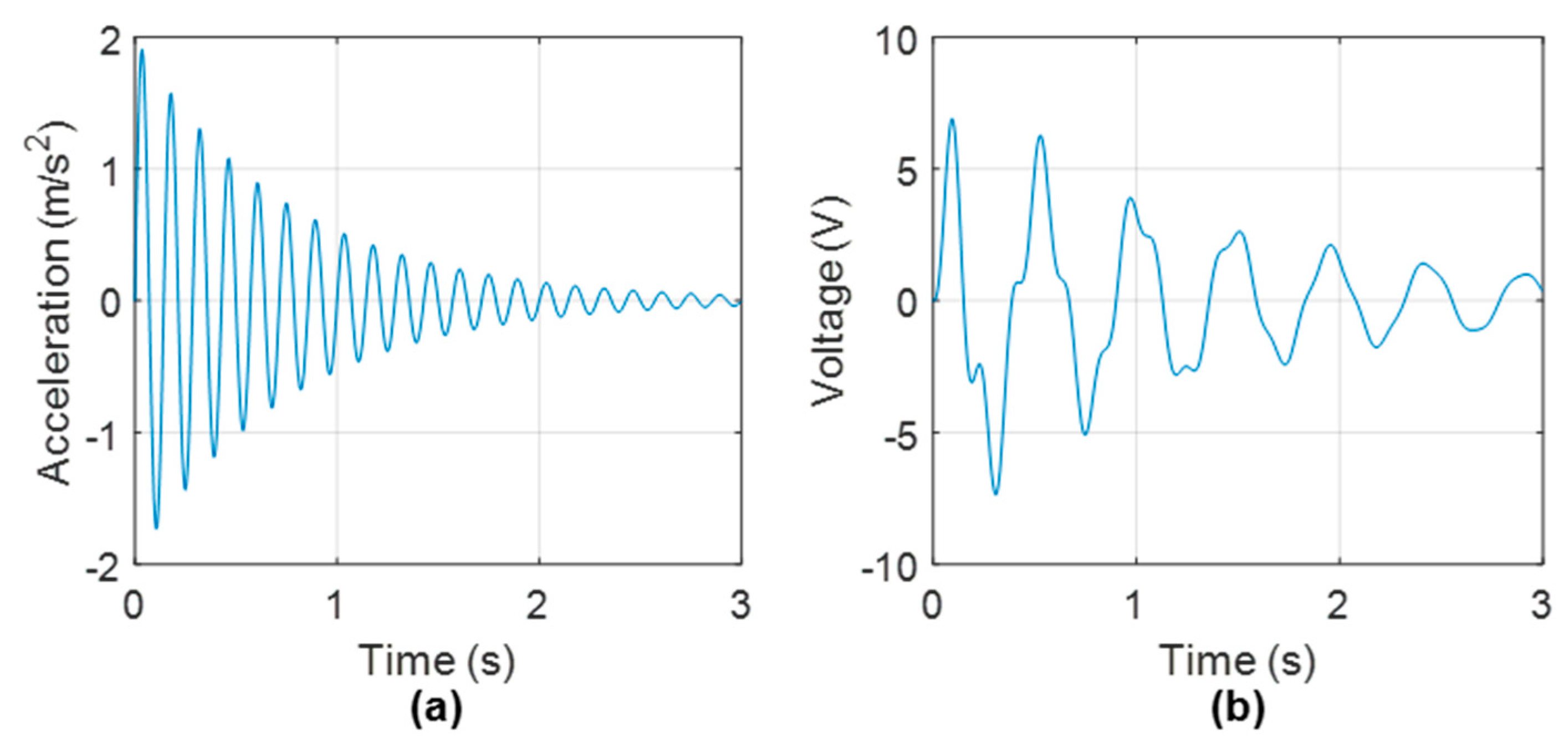
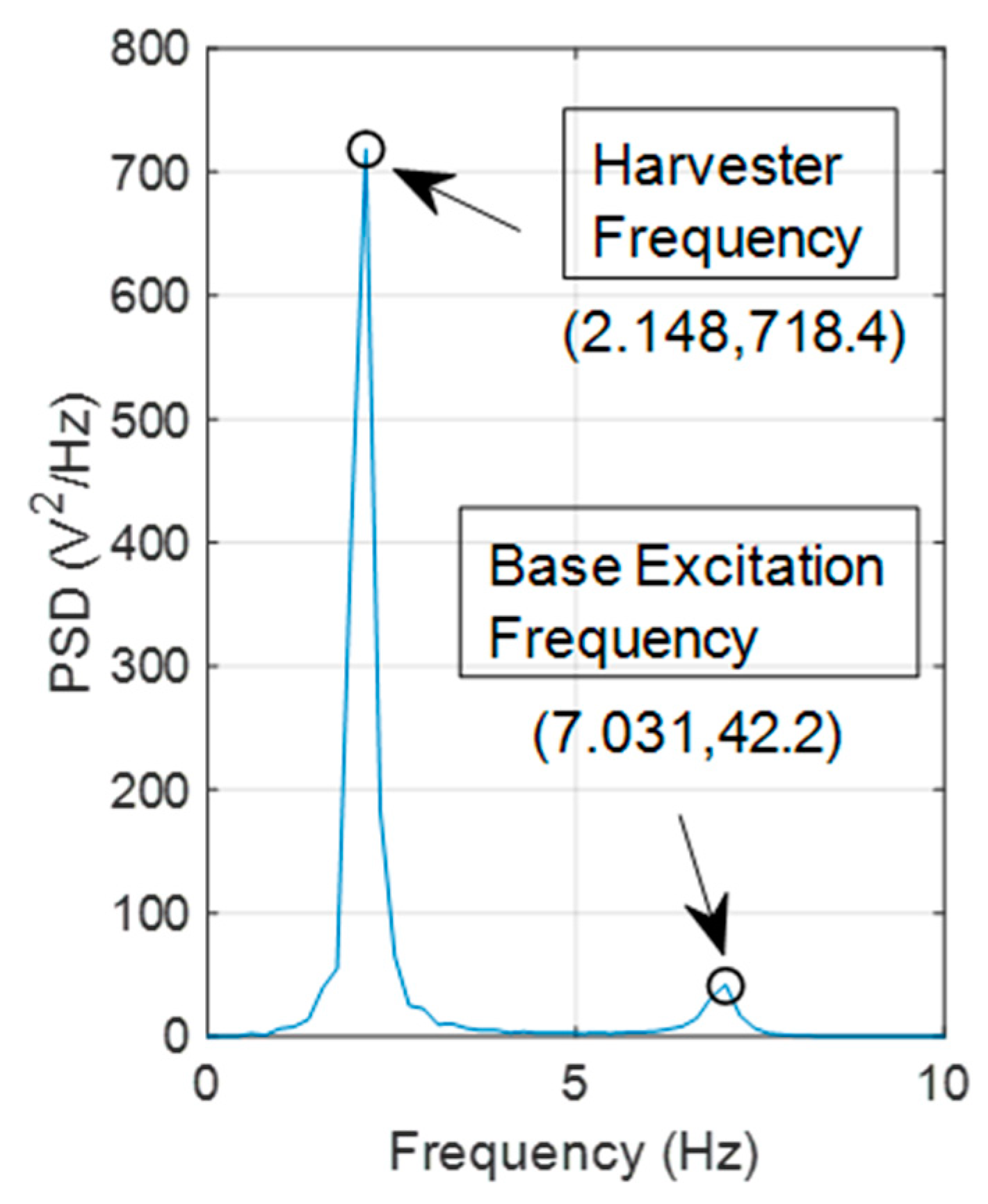
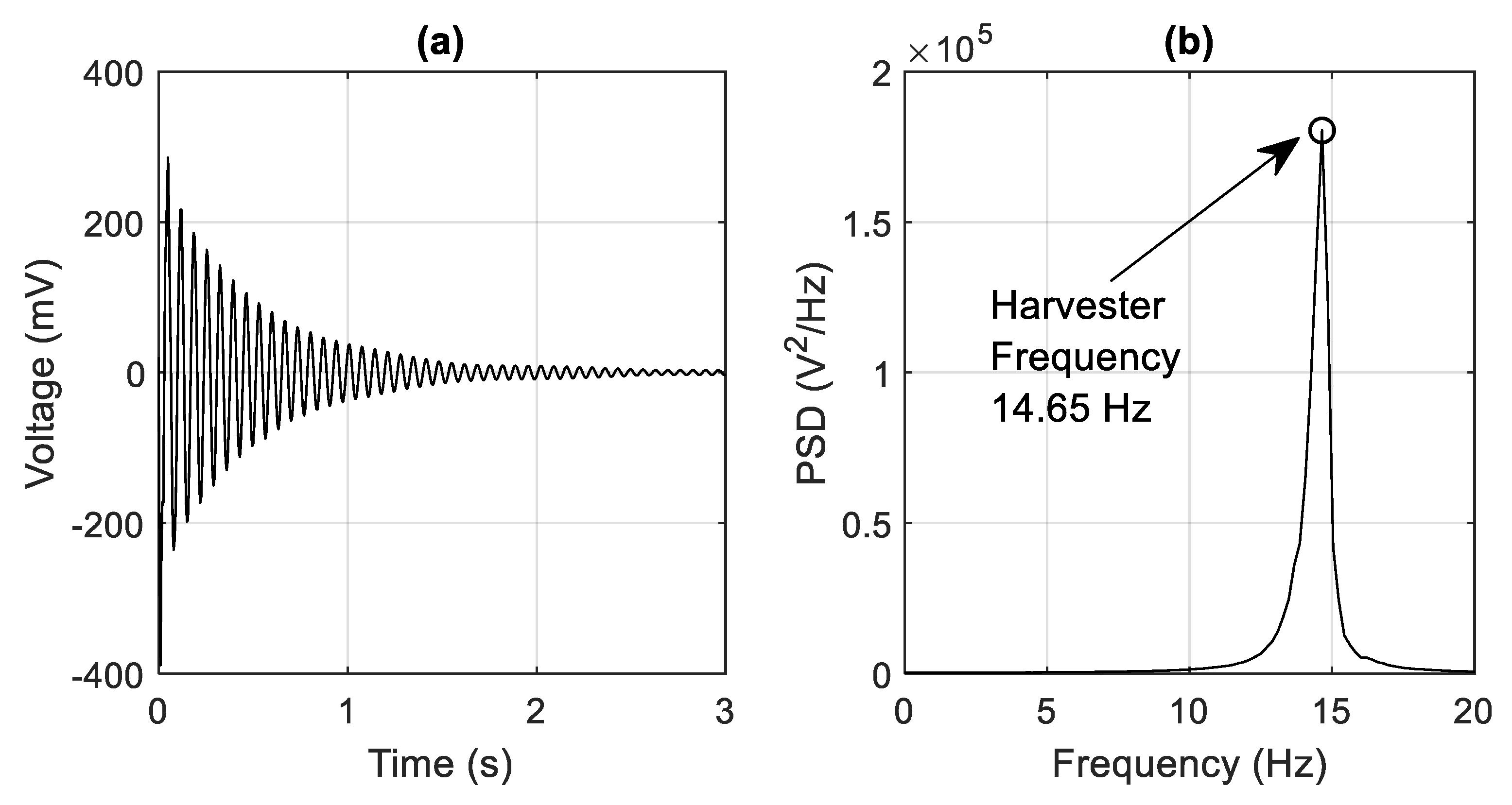
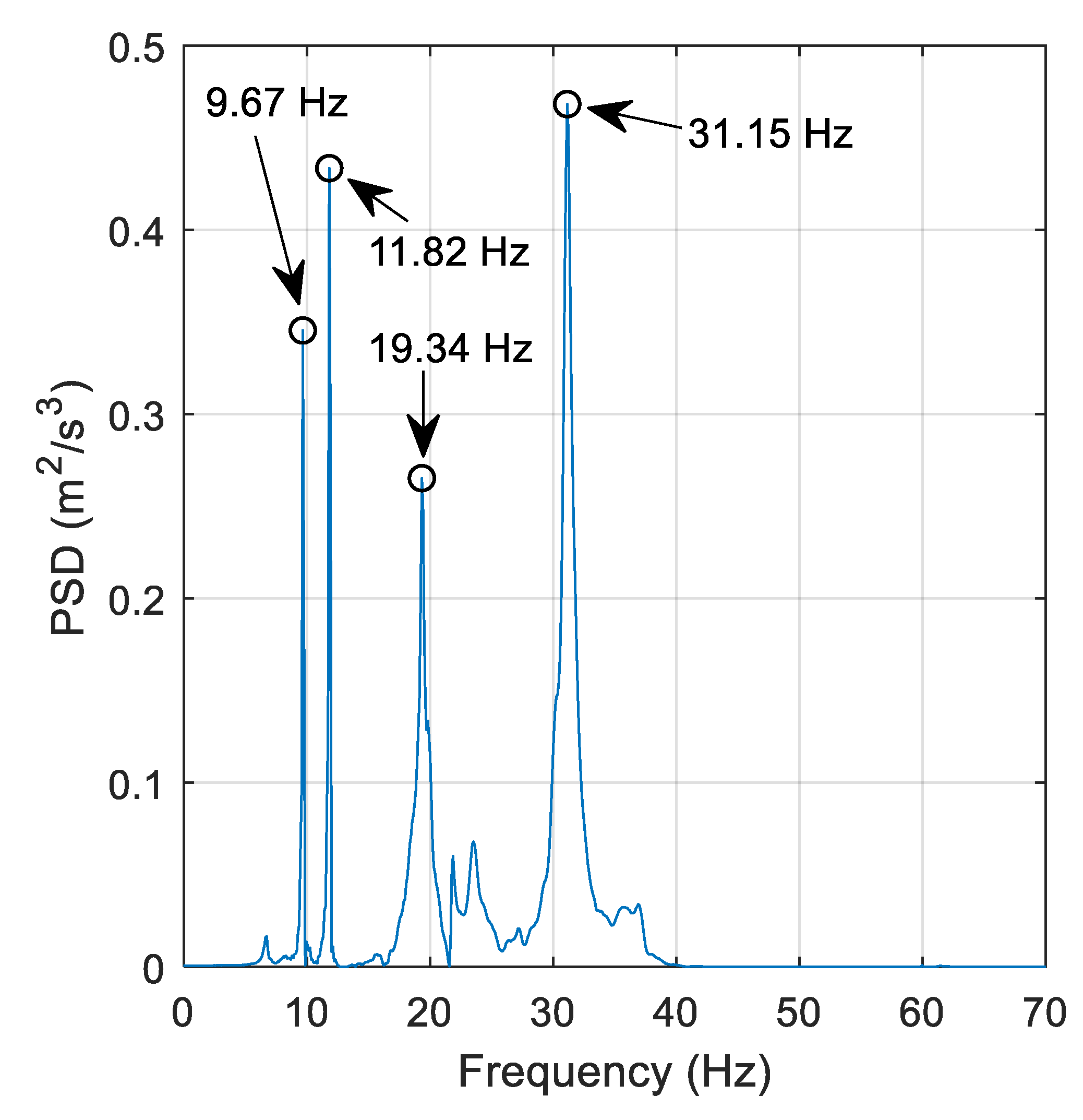
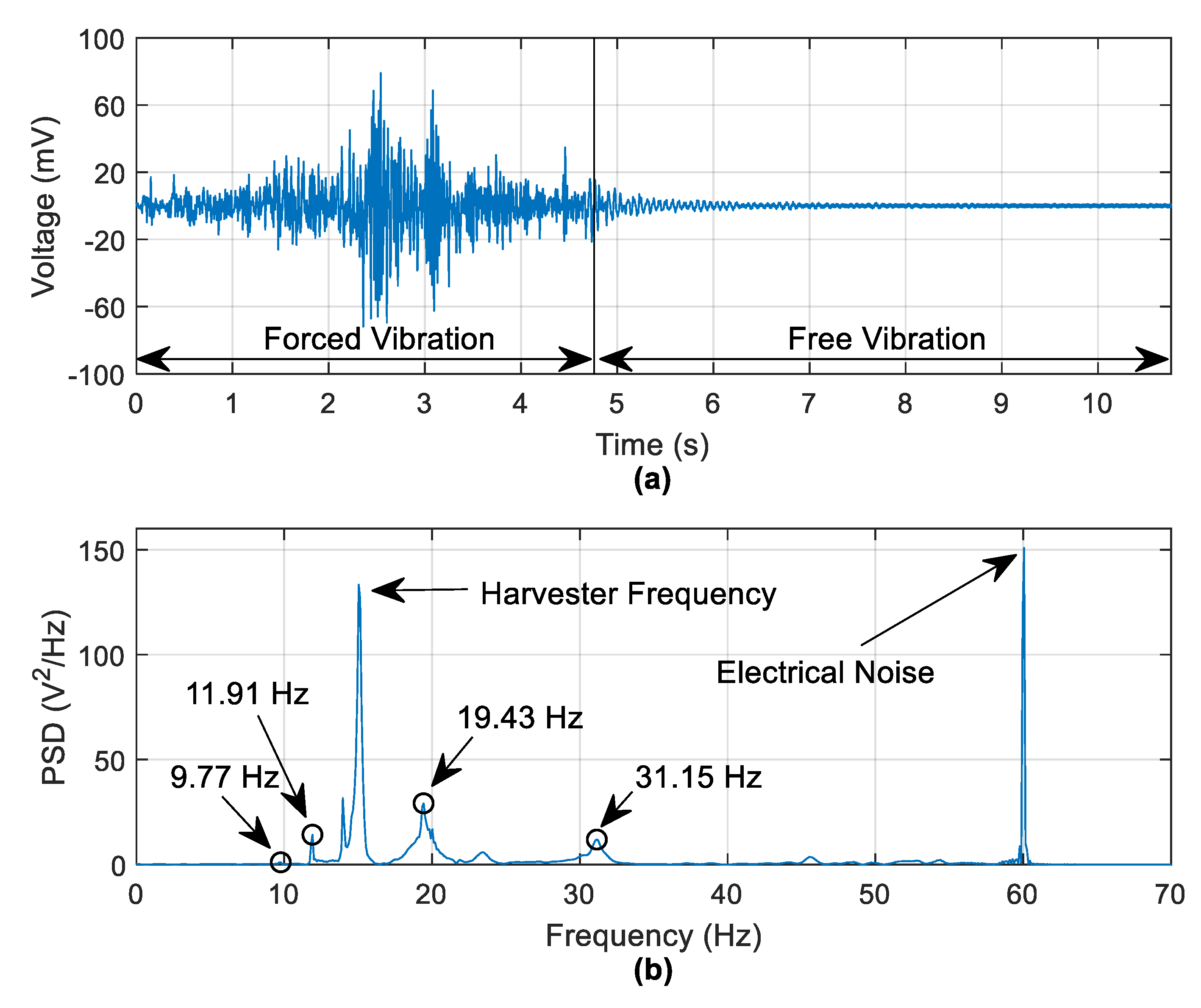
5.2. Acceleration Data Versus Energy Harvesting Voltage to Detect Bridge Frequencies
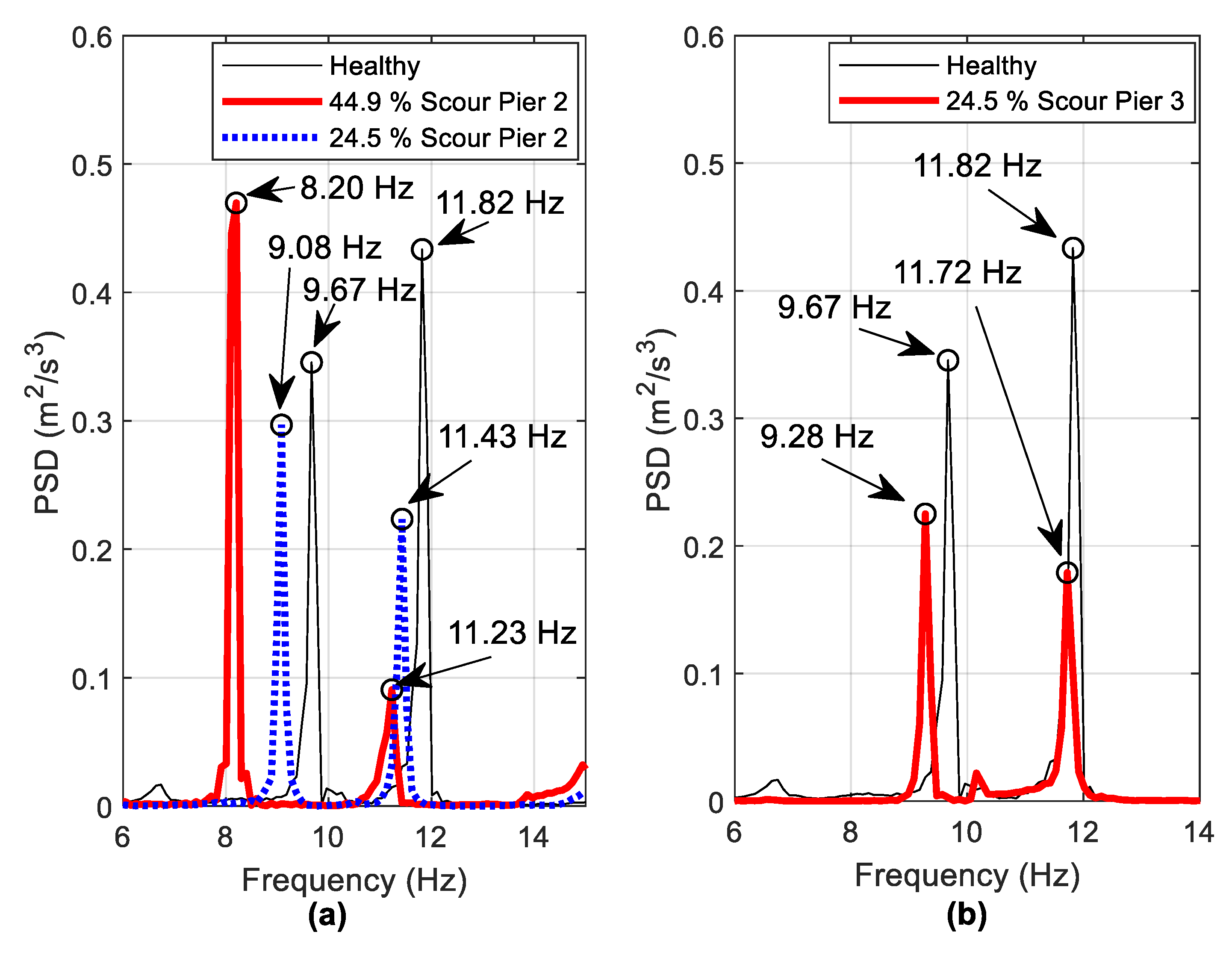
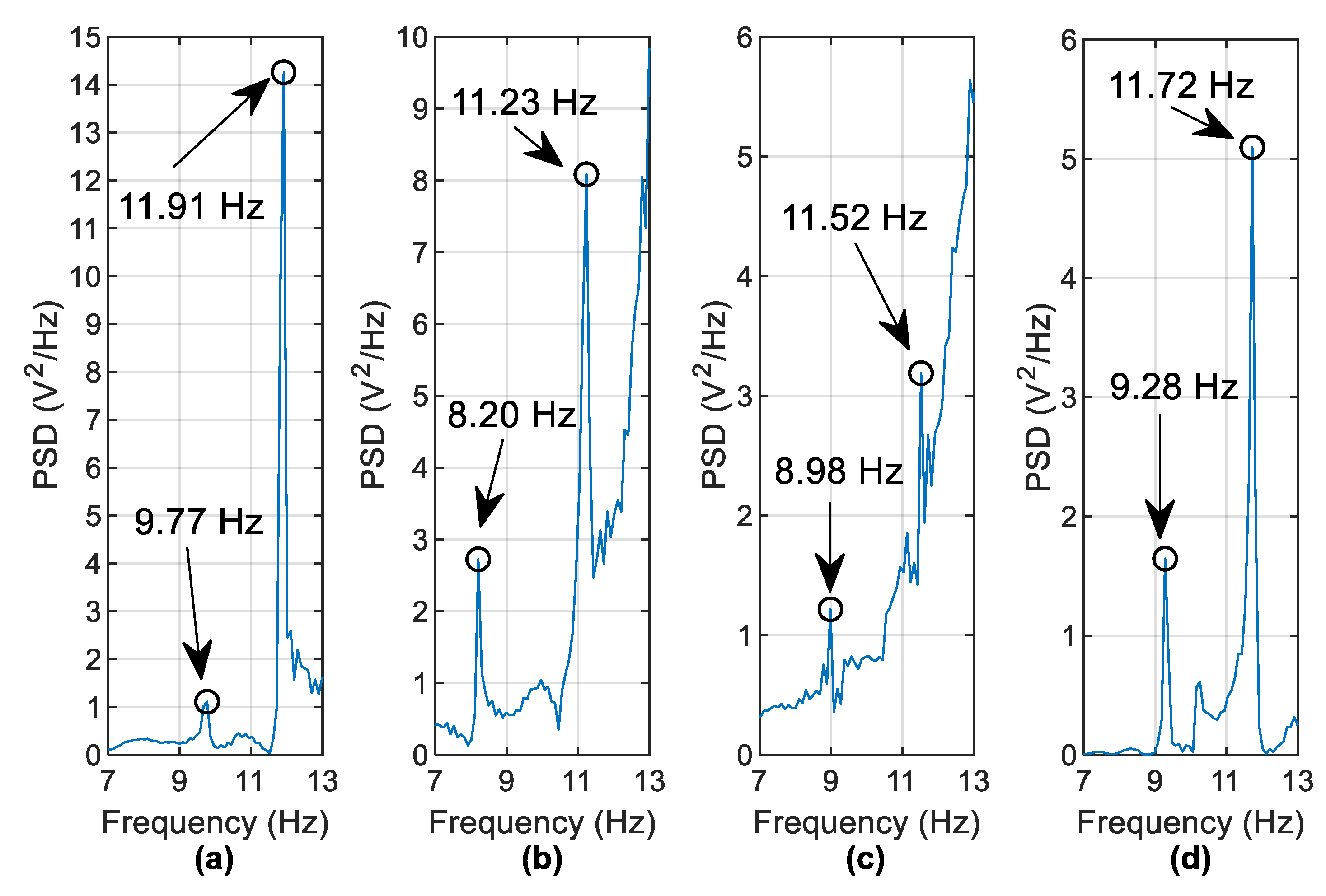
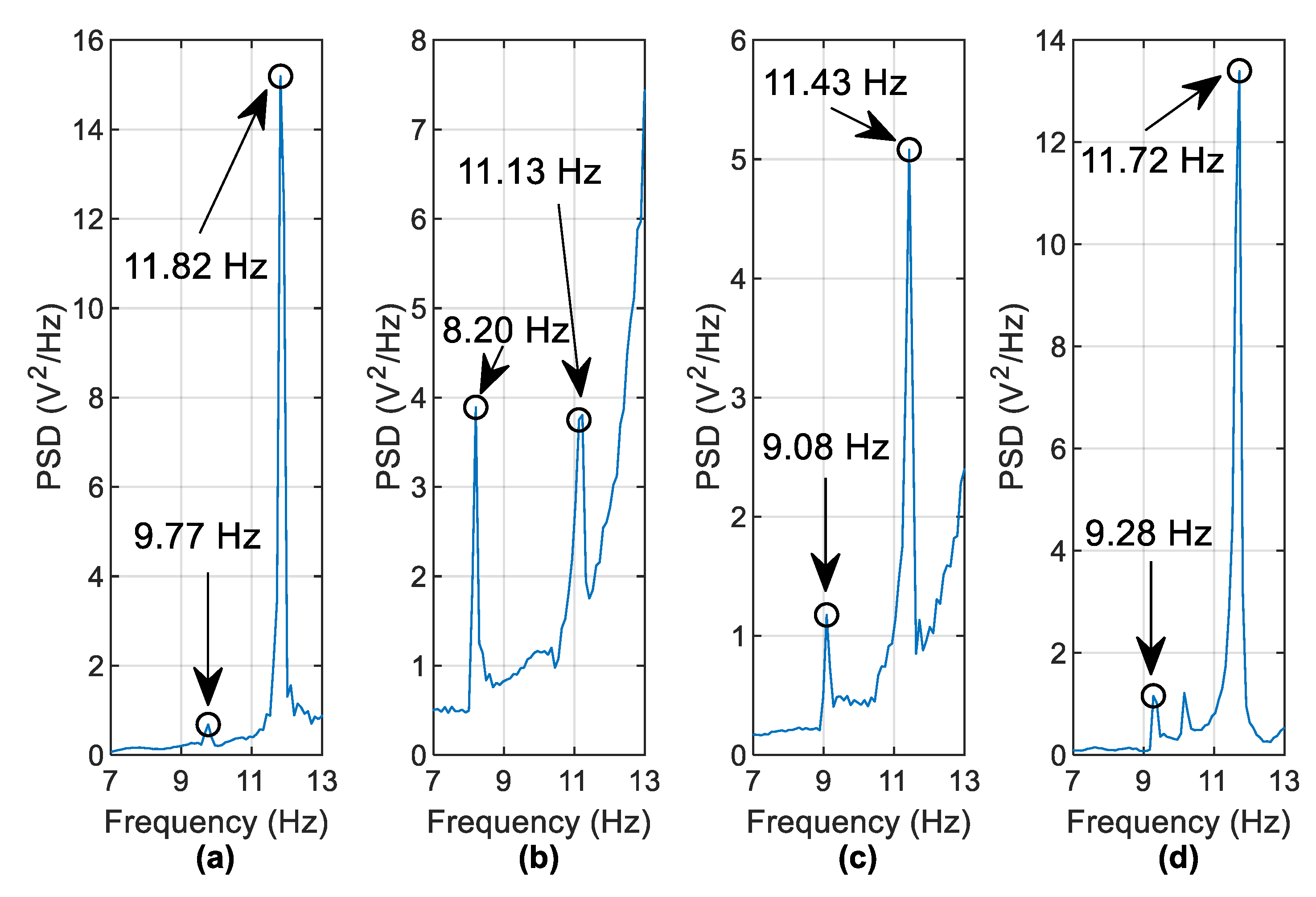
5.3. Frequency Changes Due to Scour—Accelerometer Versus EHD
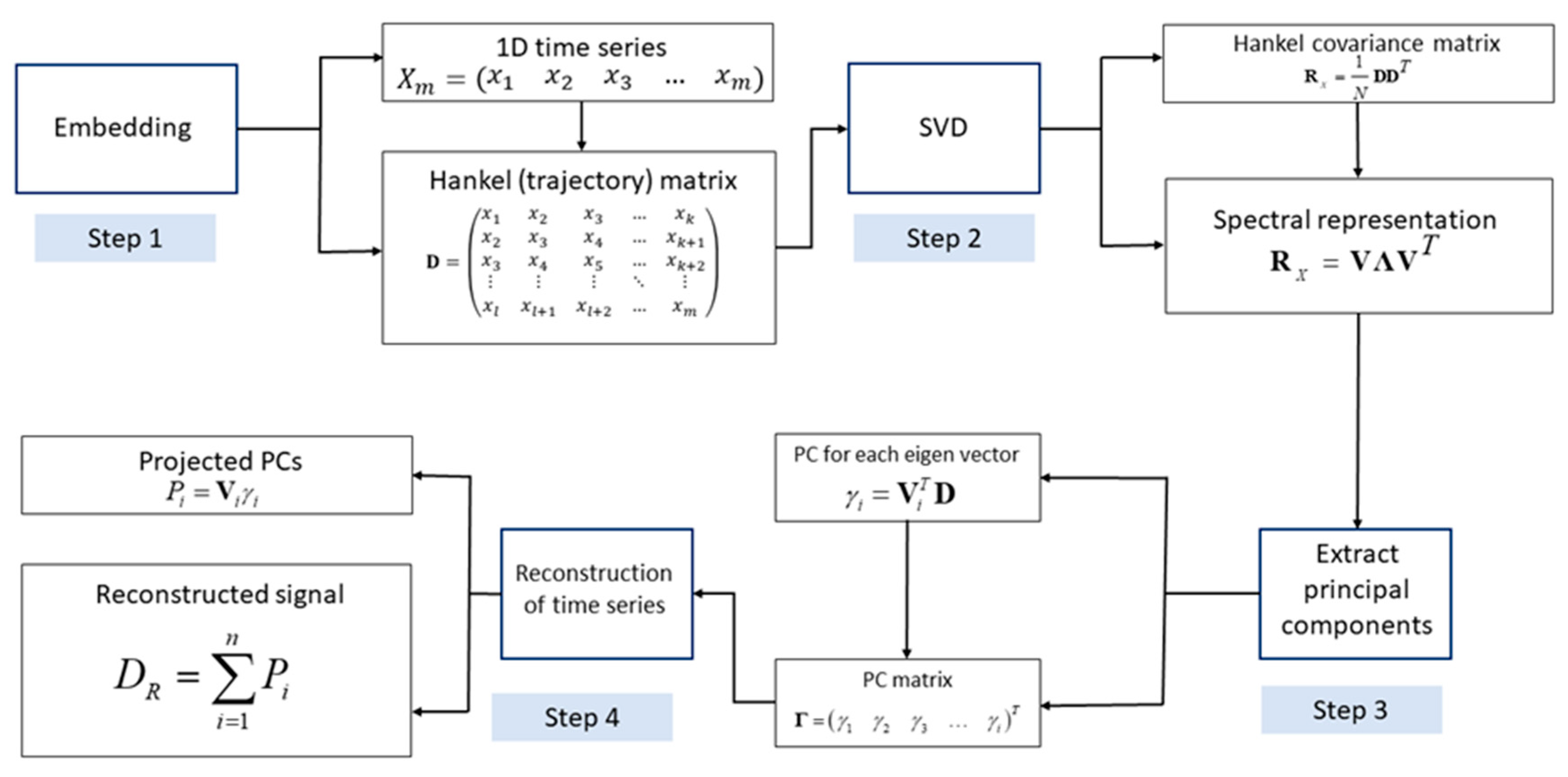
5.4. Removal of Harmonics and Operational Noise for the Experimental Study
5.5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Hamill, L. Bridge Hydraulics; Spon Press: London, UK, 1999. [Google Scholar]
- Bao, T.; Swartz, R.A.; Vitton, S.; Sun, Y.; Zhang, C.; Liu, Z. Critical insights for advanced bridge scour detection using the natural frequency. J. Sound Vib. 2017, 386, 116–133. [Google Scholar] [CrossRef]
- Briaud, J.-L.; Hurlebaus, S.; Chang, K.-A.; Yao, C.; Sharma, H.; Yu, O.-Y.; Darby, C.; Hunt, B.E.; Price, G.R. Realtime Monitoring of Bridge Scour Using Remote Monitoring Technology; Texas Transportation Institute: San Antonio, TX, USA, 2011. [Google Scholar]
- Elsaid, A.; Seracino, R. Rapid assessment of foundation scour using the dynamic features of bridge superstructure. Constr. Build. Mater. 2014, 50, 42–49. [Google Scholar] [CrossRef]
- Xiong, W.; Cai, C.; Kong, B.; Tang, P.; Ye, J. Identification of bridge scour depth by tracing dynamic behaviors of superstructures. KSCE J. Civ. Eng. 2018, 22, 1316–1327. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K. Determining the presence of scour around bridge foundations using vehicle-induced vibrations. J. Bridge Eng. 2016, 21, 04016065. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K. Development of a vehicle-bridge-soil dynamic interaction model for scour damage modelling. Shock Vibr. 2016, 2016, 7871089. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K.; Hester, D. Isolating the location of scour-induced stiffness loss in bridges using local modal behaviour. J. Civ. Struct. Health Monit. 2017, 7, 483–503. [Google Scholar] [CrossRef]
- Ju, S. Determination of scoured bridge natural frequencies with soil–structure interaction. Int. J. Soil Dyn. Earthq. Eng. 2013, 55, 247–254. [Google Scholar] [CrossRef]
- Klinga, J.V.; Alipour, A. Assessment of structural integrity of bridges under extreme scour conditions. Eng. Struct. 2015, 82, 55–71. [Google Scholar] [CrossRef]
- Foti, S.; Sabia, D. Influence of foundation scour on the dynamic response of an existing bridge. J. Bridge Eng. 2010, 16, 295–304. [Google Scholar] [CrossRef]
- Chen, C.-C.; Wu, W.-H.; Shih, F.; Wang, S.-W. Scour evaluation for foundation of a cable-stayed bridge based on ambient vibration measurements of superstructure. NDT E Int. 2014, 66, 16–27. [Google Scholar]
- Xiong, W.; Kong, B.; Tang, P.; Ye, J. Vibration-Based Identification for the Presence of Scouring of Cable-Stayed Bridges. J. Aerosp. Eng. 2018, 31, 04018007. [Google Scholar] [CrossRef]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vibr. Digest 2006, 38, 91–130. [Google Scholar] [CrossRef]
- Gungor, V.C.; Hancke, G.P. Industrial wireless sensor networks: Challenges, design principles, and technical approaches. IEEE Trans. Ind. Electron. 2009, 56, 4258–4265. [Google Scholar] [CrossRef]
- Ali, S.; Friswell, M.; Adhikari, S. Analysis of energy harvesters for highway bridges. J. Intell. Mater. Syst. Struct. 2011, 22, 1929–1938. [Google Scholar] [CrossRef]
- Park, J.W.; Cho, S.; Jung, H.-J.; Yun, C.-B.; Jang, S.A.; Jo, H.; Spencer, B.; Nagayama, T.; Seo, J.-W. Long-term structural health monitoring system of a cable-stayed bridge based on wireless smart sensor networks and energy harvesting techniques. In Proceedings of the 5th World Conference on Structural Control and Monitoring, Tokyo, Japan, 12–14 July 2010; pp. 1–6. [Google Scholar]
- Anton, S.R.; Sodano, H.A. A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater. Struct. 2007, 16, 3. [Google Scholar] [CrossRef]
- Xie, X.; Wu, N.; Yuen, K.V.; Wang, Q. Energy harvesting from high-rise buildings by a piezoelectric coupled cantilever with a proof mass. Int. J. Eng. Sci. 2013, 72, 98–106. [Google Scholar] [CrossRef]
- Wischke, M.; Masur, M.; Kröner, M.; Woias, P. Vibration harvesting in traffic tunnels to power wireless sensor nodes. Smart Mater. Struct. 2011, 20, 085014. [Google Scholar] [CrossRef]
- Cahill, P.; Mathewson, A.; Pakrashi, V. Experimental Validation of Piezoelectric Energy-Harvesting Device for Built Infrastructure Applications. J. Bridge Eng. 2018, 23, 04018056. [Google Scholar] [CrossRef]
- Cahill, P.; Nuallain, N.A.N.; Jackson, N.; Mathewson, A.; Karoumi, R.; Pakrashi, V. Energy harvesting from train-induced response in bridges. J. Bridge Eng. 2014, 19, 04014034. [Google Scholar] [CrossRef]
- Cahill, P.; Hazra, B.; Karoumi, R.; Mathewson, A.; Pakrashi, V. Vibration energy harvesting based monitoring of an operational bridge undergoing forced vibration and train passage. Mech. Syst. Sig. Process. 2018, 106, 265–283. [Google Scholar] [CrossRef]
- Wang, H.; Meng, Q. Analytical modeling and experimental verification of vibration-based piezoelectric bimorph beam with a tip-mass for power harvesting. Mech. Syst. Sig. Process. 2013, 36, 193–209. [Google Scholar] [CrossRef]
- Dutoit, N.E.; Wardle, B.L. Experimental Verification of Models for Microfabricated Piezoelectric Vibration Energy Harvesters. AIAA J. 2007, 45, 1126–1137. [Google Scholar] [CrossRef]
- Cahill, P.; Mathewson, A.; Ali, S.F.; Jaksic, V.; Keane, J.; O’Sullivan, A.; Pakrashi, V. Effect of Road Surface, Vehicle, and Device Characteristics on Energy Harvesting from Bridge-Vehicle Interactions. Comput. Civ. Infrastruct. Eng. 2016, 31, 921–935. [Google Scholar] [CrossRef]
- Kwon, Y.W.; Bang, H. The Finite Element Method Using MATLAB; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Fitzgerald, P.C.; Malekjafarian, A.; Cantero, D.; OBrien, E.J.; Prendergast, L.J. Drive-by scour monitoring of railway bridges using a wavelet-based approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K. A comparison of initial stiffness formulations for small-strain soil–pile dynamic Winkler modelling. Soil Dyn. Earthq. Eng. 2016, 81, 27–41. [Google Scholar] [CrossRef]
- Clough, R.W.; Penzien, J. Dynamics of Structures; McGraw-Hill: Berkeley, CA, USA, 1993. [Google Scholar]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef]
- Otsuki, T.; Isa, A.B.M.; Samuelson, R.D. Electric power grid interconnections in Northeast Asia: A quantitative analysis of opportunities and challenges. Energy Policy 2016, 89, 311–329. [Google Scholar] [CrossRef]
- Allen, M.R.; Smith, L.A. Optimal filtering in singular spectrum analysis. Phys. Lett. A 1997, 234, 419–428. [Google Scholar] [CrossRef]
- Bhowmik, B.; Krishnan, M.; Hazra, B.; Pakrashi, V. Real-time unified single-and multi-channel structural damage detection using recursive singular spectrum analysis. Struct. Health Monit. 2019, 18, 563–589. [Google Scholar] [CrossRef]
- Salawu, O. Detection of structural damage through changes in frequency: A review. Eng. Struct. 1997, 19, 718–723. [Google Scholar] [CrossRef]
- Gül, M.; Catbas, F.N. Statistical pattern recognition for Structural Health Monitoring using time series modeling: Theory and experimental verifications. Mech. Syst. Signal Process. 2009, 23, 2192–2204. [Google Scholar] [CrossRef]
- Mao, J.-X.; Wang, H.; Feng, D.-M.; Tao, T.-Y.; Zheng, W.-Z. Investigation of dynamic properties of long-span cable-stayed bridges based on one-year monitoring data under normal operating condition. Struct. Control. Health Monit. 2018, 25, e2146. [Google Scholar] [CrossRef]
- Cahill, P.; O’Keeffe, R.; Jackson, N.; Mathewson, A.; Pakrashi, V. Structural Health Monitoring of Reinforced Concrete Beam using Piezoelectric Energy Harvesting System. In Proceedings of the 7th European Workshop on Structural Health Monitoring (EWSHM 2014), Nantes, France, 8–11 July 2014. [Google Scholar]
- Cahill, P.; Pakrashi, V.; Sun, P.; Mathewson, A.; Nagarajaiah, S. Energy Harvesting Techniques for Health Monitoring and Indicators for Control of a Damaged Pipe Structure. Smart Struct. Syst. 2018, 21, 287–303. [Google Scholar]
- Krishnan, M.; Bhowmik, B.; Hazra, B.; Pakrashi, V. Real time damage detection using recursive principal components and time varying auto-regressive modeling. Mech. Syst. Signal Process. 2018, 101, 549–574. [Google Scholar] [CrossRef]
- Buckley, T.; Watson, P.; Cahill, P.; Jakšić, V.; Pakrashi, V. Mitigating the structural vibrations of wind turbines using tuned liquid column damper considering soil-structure interaction. Renew. Energy 2018, 120, 322–341. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Nikitas, N.; Garnsey, J.; Alexander, N.; Cox, J.; Lombardi, D.; Wood, D.M.; Nash, D. Observed dynamic soil–structure interaction in scale testing of offshore wind turbine foundations. Soil Dyn. Earthq. Eng. 2013, 54, 47–60. [Google Scholar] [CrossRef]
- Michalis, P.; Tarantino, A.; Tachtatzis, C.; Judd, M.D. Wireless monitoring of scour and re-deposited sediment evolution at bridge foundations based on soil electromagnetic properties. Smart Mater. Struct. 2015, 24, 125029. [Google Scholar] [CrossRef]
- Khelifa, A.; Garrow, L.A.; Higgins, M.J.; Meyer, M.D. Impacts of Climate Change on Scour-Vulnerable Bridges: Assessment Based on HYRISK. J. Infrastruct. Syst. 2013, 19, 138–146. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Symbol | Value | Unit |
|---|---|---|---|
| Tip mass | 2.5 | g | |
| Equivalent viscous damping ratio | 0.038 | - | |
| Stiffness | 0.4286 | N m−1 | |
| Natural Frequency | 2.08 | Hz | |
| Electromechanical Coupling | 7.501 | μC m−1 | |
| Capacitance of the piezoceramic material | 2.866 | nF | |
| Nondimensional time constant | 0.9 | - | |
| Resistance of energy harvester | Rl | 1000 | kΩ |
| Property | Symbol | Unit | Value |
|---|---|---|---|
| Span length | |||
| Beam depth | |||
| Beam cross-sectional area | |||
| Beam second moment of area | |||
| Beam modulus of elasticity | |||
| Beam density | |||
| Underlying foundation stiffness | |||
| Pier mass | |||
| Pier stiffness |
| Mode Number | Healthy | 24.5% Scour | 44.9% Scour |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fitzgerald, P.C.; Malekjafarian, A.; Bhowmik, B.; Prendergast, L.J.; Cahill, P.; Kim, C.-W.; Hazra, B.; Pakrashi, V.; OBrien, E.J. Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors 2019, 19, 2572. https://doi.org/10.3390/s19112572
Fitzgerald PC, Malekjafarian A, Bhowmik B, Prendergast LJ, Cahill P, Kim C-W, Hazra B, Pakrashi V, OBrien EJ. Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors. 2019; 19(11):2572. https://doi.org/10.3390/s19112572
Chicago/Turabian StyleFitzgerald, Paul C., Abdollah Malekjafarian, Basuraj Bhowmik, Luke J. Prendergast, Paul Cahill, Chul-Woo Kim, Budhaditya Hazra, Vikram Pakrashi, and Eugene J. OBrien. 2019. "Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device" Sensors 19, no. 11: 2572. https://doi.org/10.3390/s19112572
APA StyleFitzgerald, P. C., Malekjafarian, A., Bhowmik, B., Prendergast, L. J., Cahill, P., Kim, C.-W., Hazra, B., Pakrashi, V., & OBrien, E. J. (2019). Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors, 19(11), 2572. https://doi.org/10.3390/s19112572