Methods for Assessing and Optimizing Solar Orientation by Non-Planar Sensor Arrays




Abstract
:1. Introduction
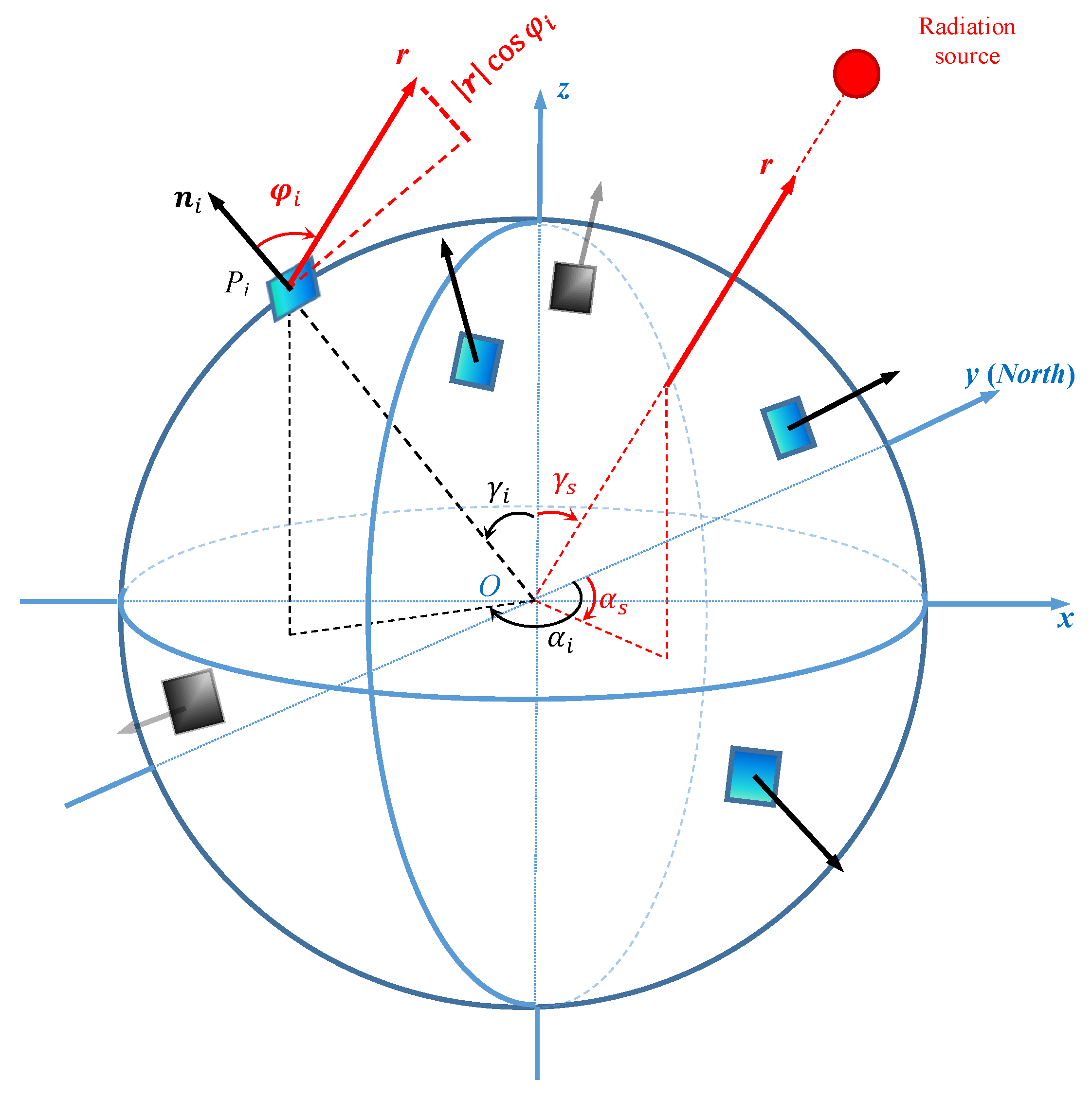
2. Method for Orientation Determination Based on Non-Planar Sensor Arrays
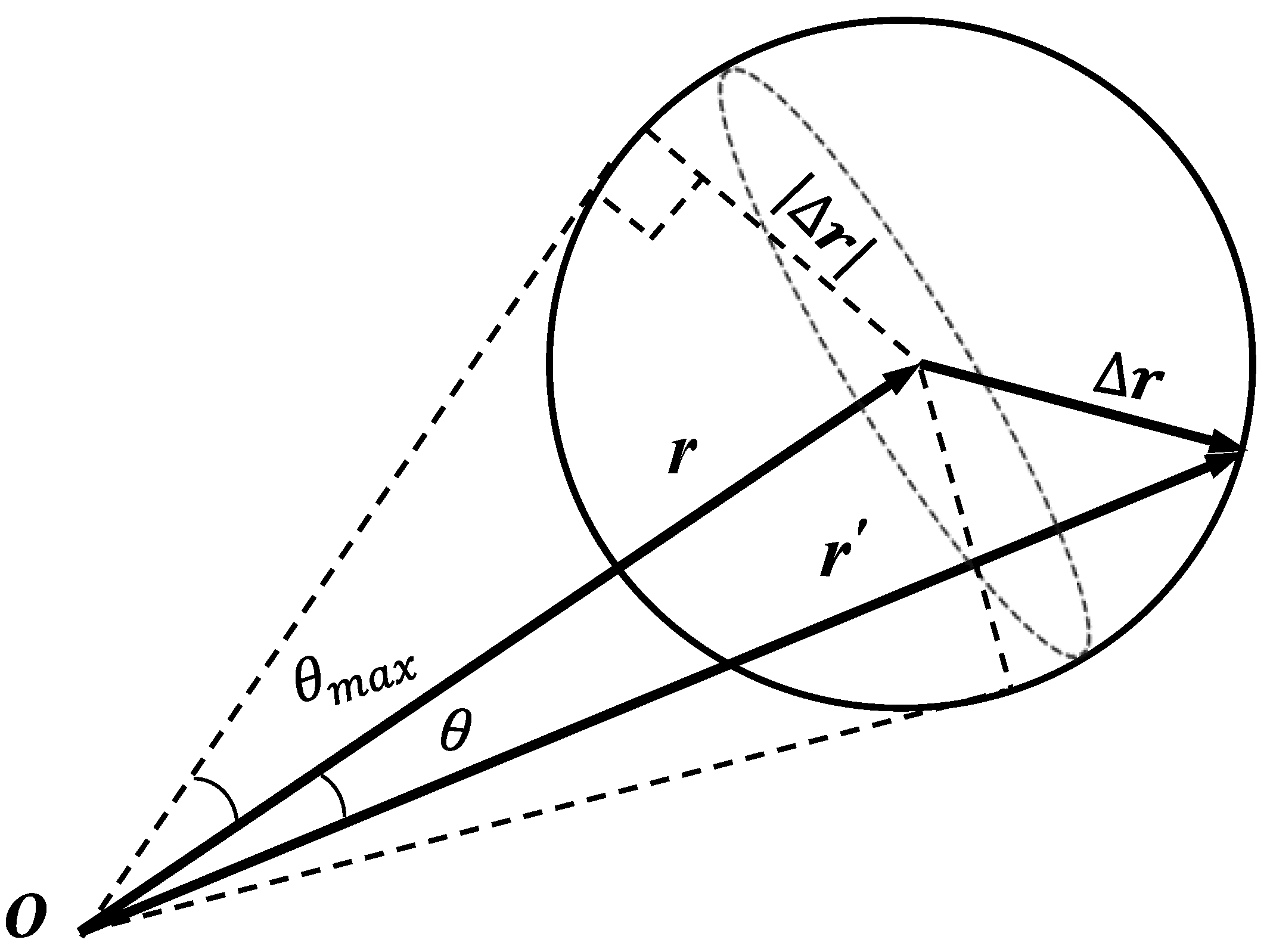
3. Mathematical Formulation of Orientation Error
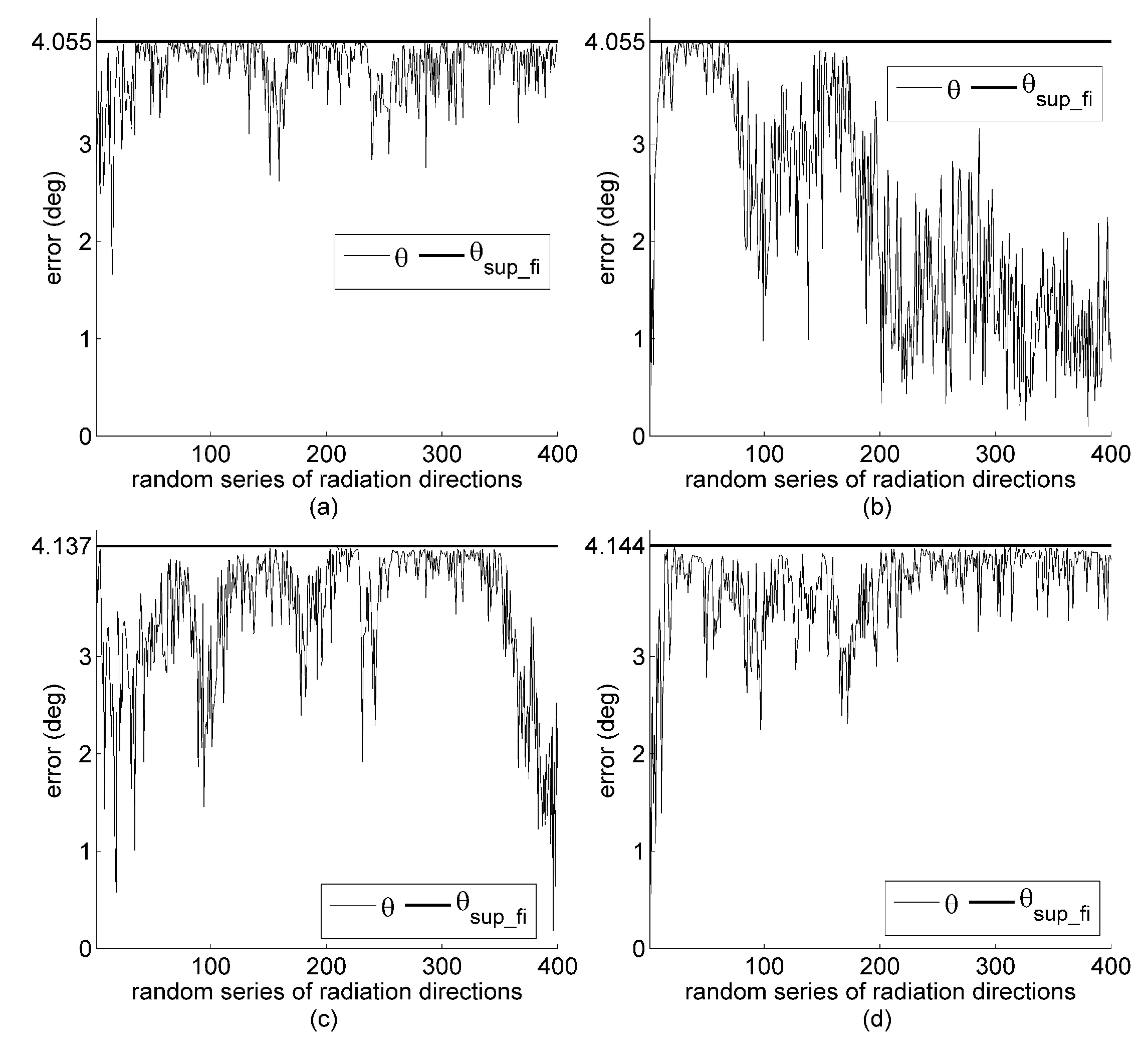
4. Assessment of Orientation Determination
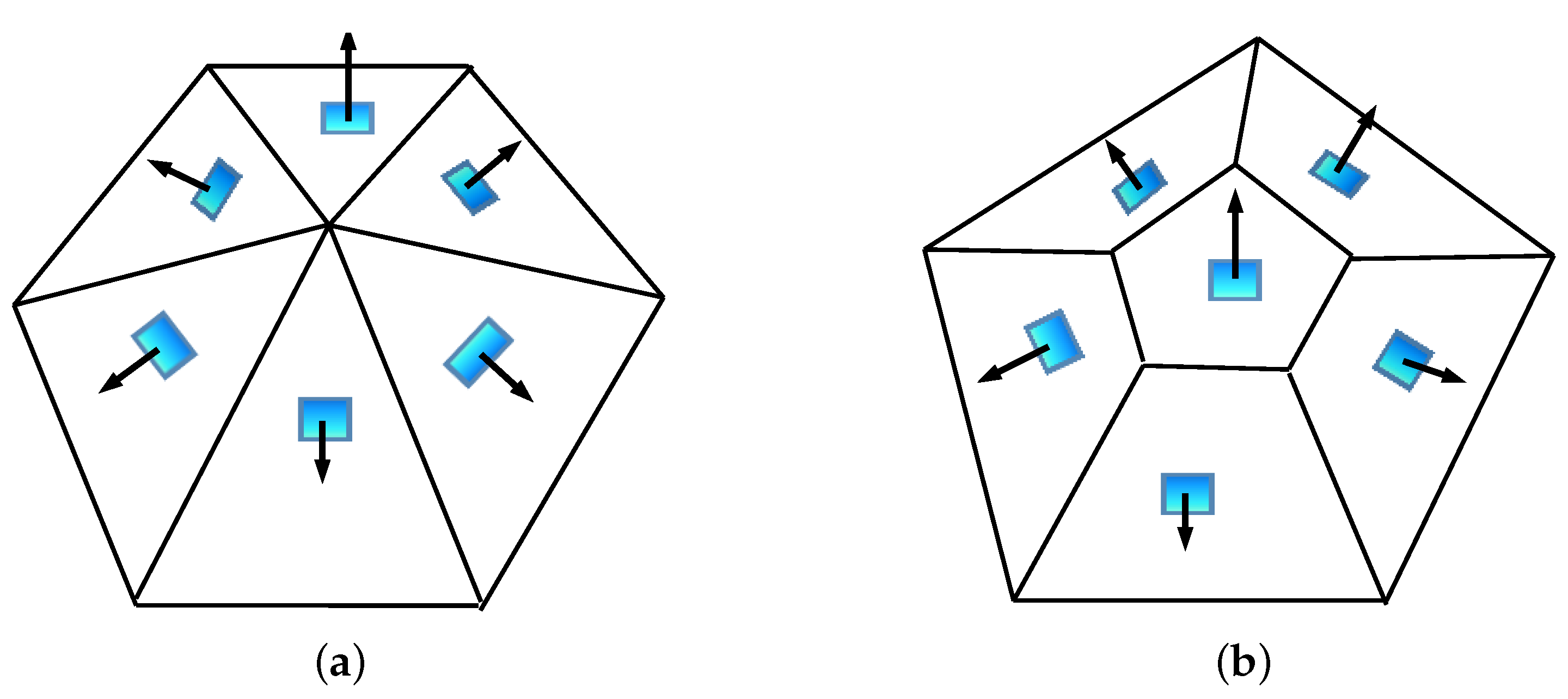
5. Optimization of Orientation Determination
6. Applications and Analysis
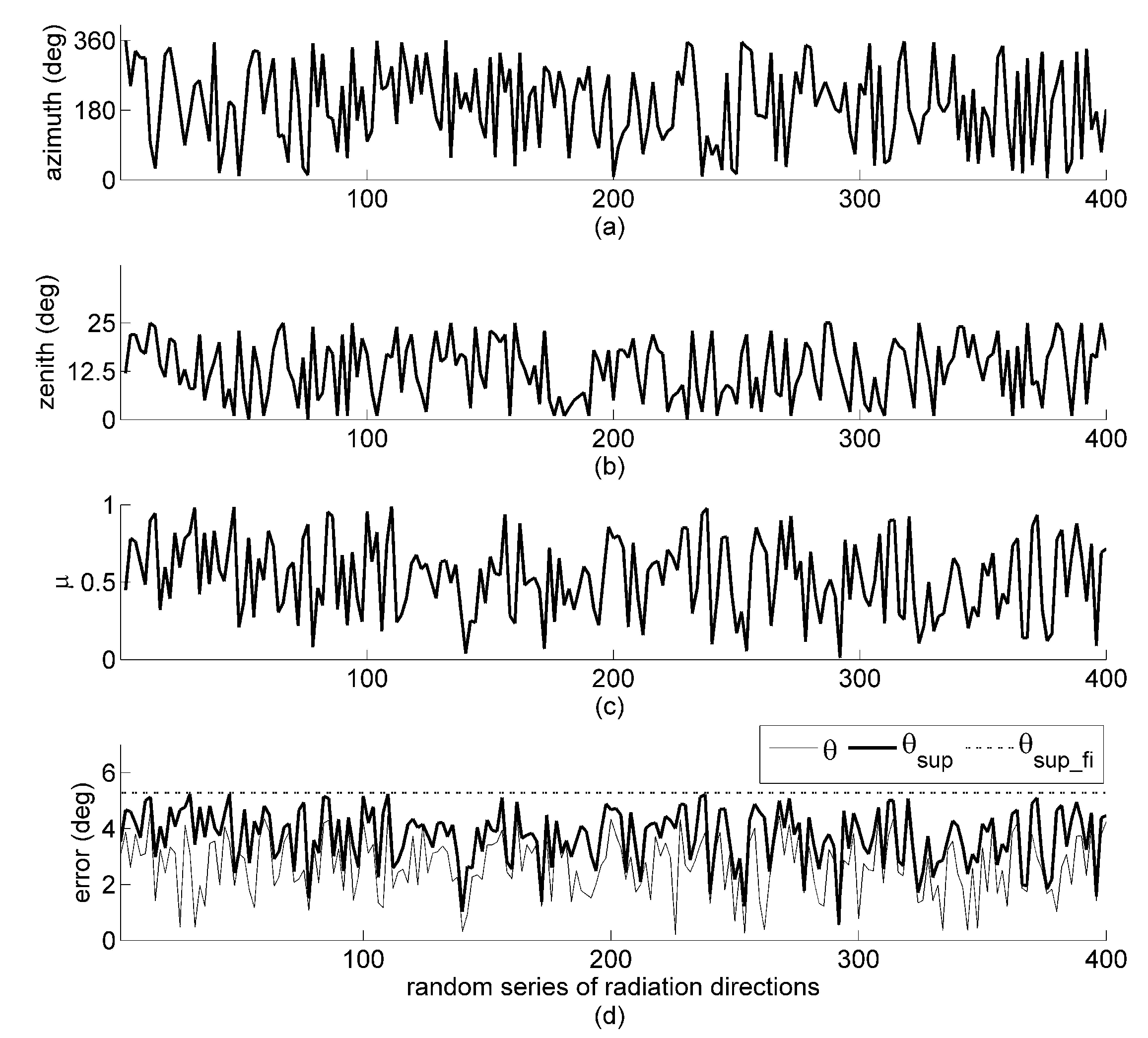
6.1. Simulations
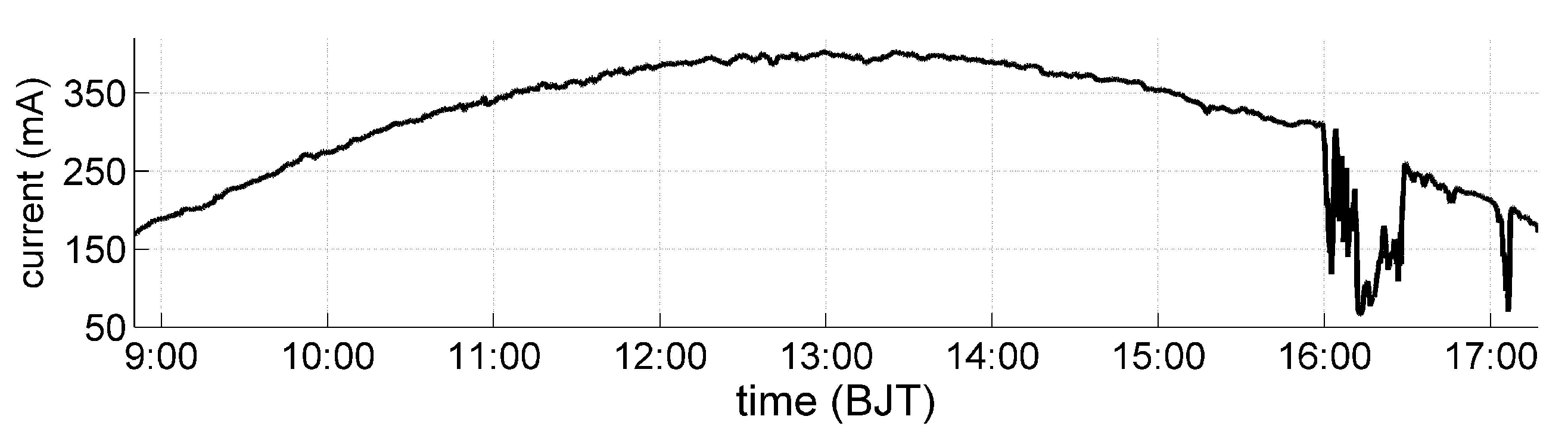
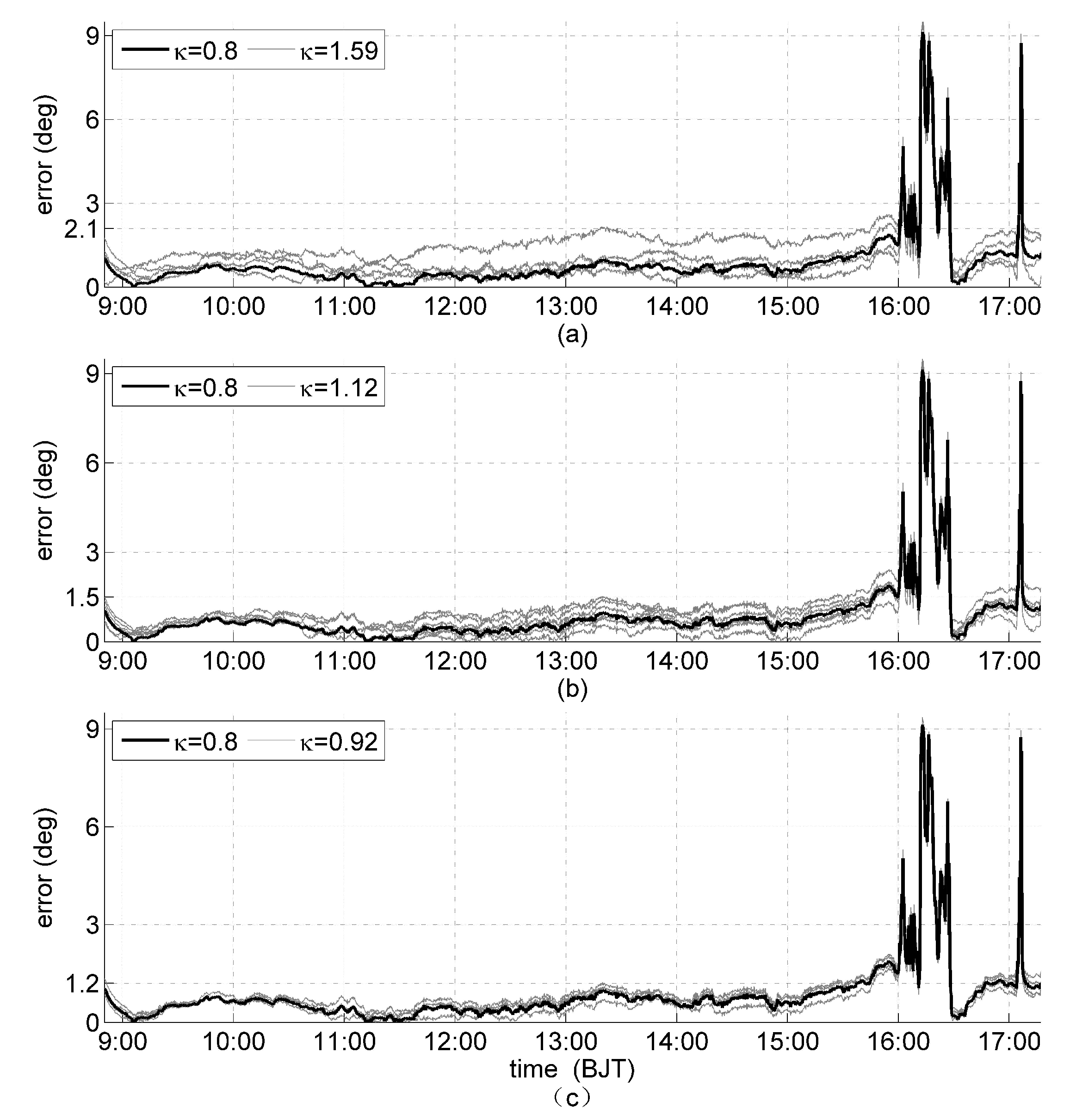
6.2. Field Experiment of Solar Orientation Determination
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Springmann, J.C.; Sloboda, A.J.; Klesh, A.T.; Bennett, M.W.; Cutler, J.W. The attitude determination system of the RAX satellite. Acta Astronaut. 2012, 75, 120–135. [Google Scholar] [CrossRef]
- Taraba, M.; Rayburn, C.; Tsuda, A. Boeing’s CubeSat TestBed 1 Attitude Determination Design and On-Orbit Experience. In Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, USA, 10–13 August 2009. [Google Scholar]
- Furgale, P.; Enright, J.; Barfoot, T. Sun sensor navigation for planetary rovers: Theory and field testing, aerospace and electronic systems. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1631–1647. [Google Scholar] [CrossRef]
- Barnes, J.; Liu, C.; Ariyur, K. A hemispherical sun sensor for orientation and geolocation. IEEE Sens. J. 2014, 14, 4423–4433. [Google Scholar] [CrossRef]
- Away, Y.; Ikhsan, M. Dual-axis sun tracker sensor based on tetrahedron geometry. Autom. Constr. 2016, 73, 175–183. [Google Scholar] [CrossRef]
- Antonello, A.; Olivieri, L.; Francesconi, F. Development of a low-cost sun sensor for nanosatellites. Acta Astronautica 2018, 144, 429–436. [Google Scholar] [CrossRef]
- Saleem, R.; Lee, S. Accurate and cost-effective micro Sun sensor based on CMOS black sun effect. Sensors 2019, 19, 739. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.Y.; Peng, J.; Gao, X. Micro digital sun sensor with linear detector. Rev. Sci. Instrum. 2016, 87, 075003. [Google Scholar] [CrossRef] [PubMed]
- Abhilash, M.; Kumar, S.; Sandya, S.; Sridevi, T.V.; Prabhamani, H.R. Implementation of the MEMS-based dual-axis sun sensor for nano satellites. In Proceedings of the Metrology for Aerospace, Benevento, Italy, 29–30 May 2014; pp. 190–195. [Google Scholar]
- Farian, L.; Hafliger, P.; Lenero-Bardallo, J.A. A miniaturized two-axis ultra low latency and low-power sun sensor for attitude determination of micro space probes. IEEE Trans. Circuits Syst. 2018, 65, 1543–1554. [Google Scholar] [CrossRef]
- Lizbeth, S.C. A review on sun position sensors used in solar applications. Renew. Sustain. Energy Rev. 2018, 82, 2128–2146. [Google Scholar]
- Lu, X.Z.; Tao, Y.; Xie, K.; Li, X.P.; Wang, S.L.; Bao, W.M.; Chen, R.J. Sun sensor using a nanosatellites solar panels by means of time-division multiplexing. IET Sci. Meas. Technol. 2017, 11, 489–494. [Google Scholar] [CrossRef]
- Springmann, J.C.; Cutler, J.W. On-orbit calibration of photodiodes for attitude determination. J. Guid. Control Dyn. 2014, 37, 1–16. [Google Scholar] [CrossRef]
- Yousefian, P.; Durali, M.; Rashidian, B.; Jalali, M.A. Fabrication, characterization, and error mitigation of non-flat sun sensor. Sens. Actuators A Phys. 2017, 261, 243–251. [Google Scholar] [CrossRef]
- Springmann, J.C.; Cutler, J.W. Optimization of directional sensor orientation with application to sun sensing. J. Guid. Control Dyn. 2014, 37, 828–837. [Google Scholar] [CrossRef]
- Yousefian, P.; Durali, M.; Jalali, M.A. Optimal design and simulation of sensor arrays for solar motion estimation. IEEE Sens. J. 2017, 17, 1673–1680. [Google Scholar] [CrossRef]
- Wang, J. An orientation method and analysis of optical radiation sources based on polyhedron and parallel incident light. Sci. China Technol. Sci. 2013, 56, 475–483. [Google Scholar] [CrossRef]
- Lu, X.Z.; Tao, Y.B.; Xie, K.; Li, X.P.; Wang, S.L.; Bao, W.M.; Chen, R.J. A photodiode based miniature sun sensor. Meas. Sci. Technol. 2017, 28, 055104. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.C.; Zhang, Y.; Huang, Y.L.; Yang, J.Y.; Du, Y.M. Performance in Solar Orientation Determination for Regular Pyramid Sun Sensors. Sci. China Technol. Sci. Sens. 2019, 19, 1424. [Google Scholar] [CrossRef]
- Wan, B.Z.; Mo, Y.Q.; Yang, Y. Modern meteorological radiometric technique. In Modern Meteorological Radiometric Technique; China Meteorological Press: Beijing, China, 2008; pp. 1–30. [Google Scholar]
- Wang, B.Z.; Liu, G.S. Improvement in the astronomical parameters computation for solar radiation observation. Acta Energiae Solaris Sinica 1991, 12, 27–32. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Array | Zenith Angle (deg) | Azimuth Angle (deg) | Non-zero Singular Values of Orientation Matrix Formed by All Six Sensor Planes | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | |
| 1 | 40 | 45 | 45 | 45 | 45 | 45 | 90 | 18 | 306 | 234 | 162 | 150 | 1.8 | 1.25 | 1.09 |
| 2 | 63.435 | 63.435 | 63.435 | 63.435 | 63.435 | 0 | 90 | 18 | 306 | 234 | 162 | 0 | 1.41 | 1.41 | 1.41 |
| 3 | 54.736 | 54.736 | 54.736 | 54.736 | 54.736 | 54.736 | 90 | 30 | 330 | 270 | 210 | 150 | 1.41 | 1.41 | 1.41 |
| 4 | 60 | 60 | 63 | 65 | 64 | 0 | 339 | 266 | 195 | 52 | 124 | 93 | 1.45 | 1.40 | 1.39 |
| 5 | 65 | 60 | 65 | 65 | 0 | 60 | 143 | 27 | 100 | 172 | 164 | 314 | 1.44 | 1.42 | 1.38 |
| Array | Orientation Matrix with | Orientation Matrix with | ||
|---|---|---|---|---|
| 1 | 0.9199 | 6 | 2.0733 | 5 |
| 2 | 0.7071 | 6 | 1.7321 | 6 |
| 3 | 0.7071 | 6 | 1.7321 | 6 |
| 4 | 0.7214 | 6 | 1.7669 | 6 |
| 5 | 0.7227 | 6 | 1.7702 | 6 |
| Array | Interference with the Same Total Energy on the Sensorplanes Forming the Orientation Matrix (i.e., ) | Interference with the Same Average Energy on the Sensor Planes Forming the Orientation Matrix (i.e., , where m is Number of Sensor Planes Forming the Orientation Matrix) | ||
|---|---|---|---|---|
| of the Matrix with | of the Matrix with | of the Matrix with | of the Matrix with | |
| 1 | 5.278 | 5.320 | 5.278 | 4.856 |
| 2 | 4.055 | 4.055 | 4.055 | 4.055 |
| 3 | 4.055 | 4.055 | 4.055 | 4.055 |
| 4 | 4.137 | 4.137 | 4.137 | 4.137 |
| 5 | 4.144 | 4.144 | 4.144 | 4.144 |
| Matrix | Azimuth Angle (deg) of the Solar Panels | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 22.5 | 45 | 77.5 | 90 | 112.5 | 135 | 157.5 | 180 | 202.5 | 225 | 247.5 | 270 | 292.5 | 315 | 337.5 | |||
| 1 | • | • | • | • | ||||||||||||||
| 2 | • | • | • | • | 1.59 | |||||||||||||
| 3 | • | • | • | • | ||||||||||||||
| 4 | • | • | • | • | ||||||||||||||
| 5 | • | • | • | • | • | • | • | • | ||||||||||
| 6 | • | • | • | • | • | • | • | • | 3.18 | |||||||||
| 7 | • | • | • | • | • | • | • | • | 1.12 | |||||||||
| 8 | • | • | • | • | • | • | • | • | ||||||||||
| 9 | • | • | • | • | • | • | • | • | ||||||||||
| 10 | • | • | • | • | • | • | • | • | ||||||||||
| 11 | • | • | • | • | • | • | • | • | • | • | • | • | ||||||
| 12 | • | • | • | • | • | • | • | • | • | • | • | • | 0.92 | |||||
| 13 | • | • | • | • | • | • | • | • | • | • | • | • | ||||||
| 14 | • | • | • | • | • | • | • | • | • | • | • | • | ||||||
| 15 | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | 0.8 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Fan, X.; Zhang, Y.; Yang, J.; Du, Y.; He, J. Methods for Assessing and Optimizing Solar Orientation by Non-Planar Sensor Arrays. Sensors 2019, 19, 2561. https://doi.org/10.3390/s19112561
Wang J, Fan X, Zhang Y, Yang J, Du Y, He J. Methods for Assessing and Optimizing Solar Orientation by Non-Planar Sensor Arrays. Sensors. 2019; 19(11):2561. https://doi.org/10.3390/s19112561
Chicago/Turabian StyleWang, Jiang, Xingang Fan, Yongchao Zhang, Jianyu Yang, Yuming Du, and Jianxin He. 2019. "Methods for Assessing and Optimizing Solar Orientation by Non-Planar Sensor Arrays" Sensors 19, no. 11: 2561. https://doi.org/10.3390/s19112561
APA StyleWang, J., Fan, X., Zhang, Y., Yang, J., Du, Y., & He, J. (2019). Methods for Assessing and Optimizing Solar Orientation by Non-Planar Sensor Arrays. Sensors, 19(11), 2561. https://doi.org/10.3390/s19112561