A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping





Abstract
1. Introduction
2. Related Work
2.1. Environmental Acoustic Databases
2.2. Challenge-Oriented Acoustic Datasets
3. Design of an Environmental Database
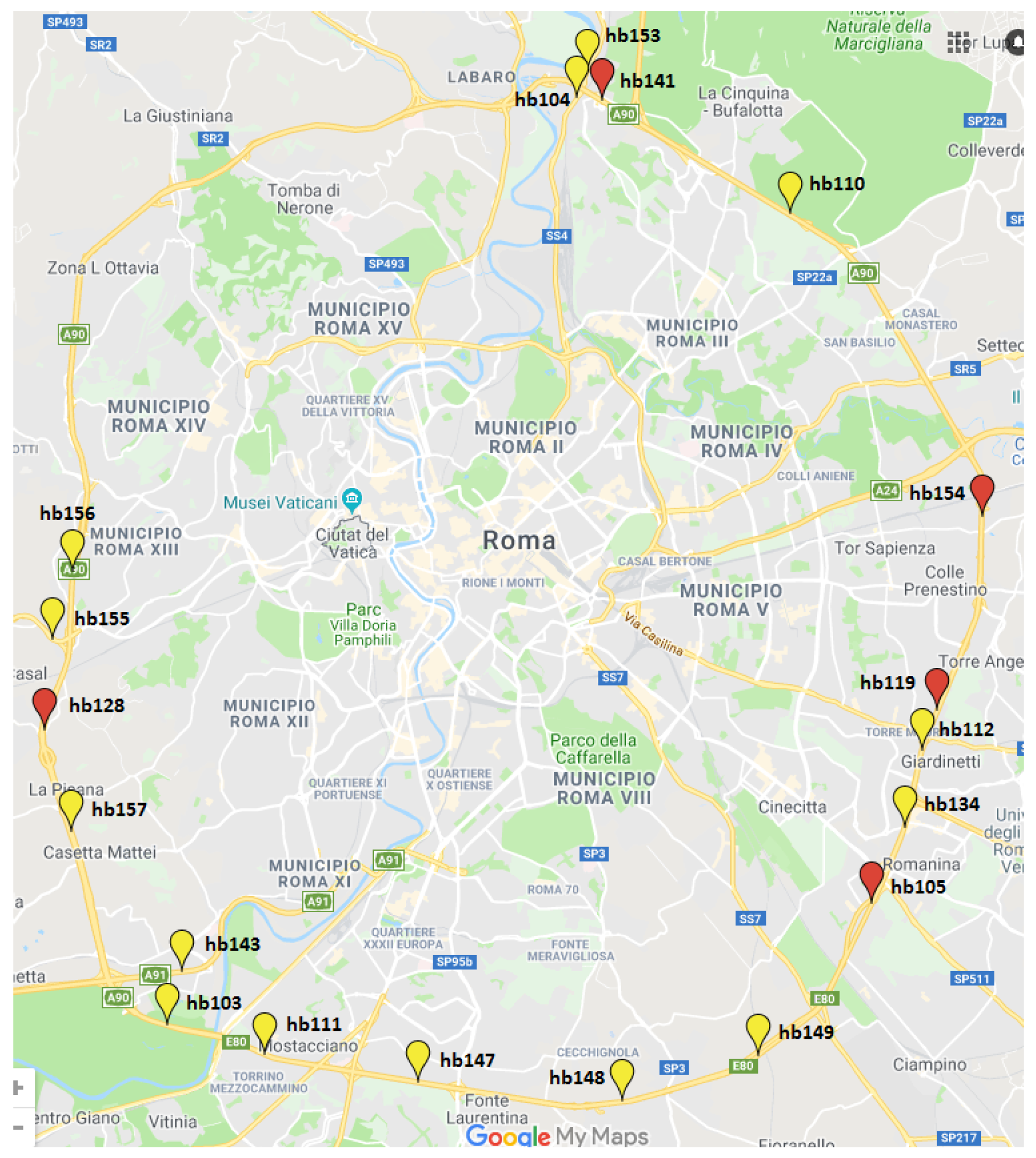
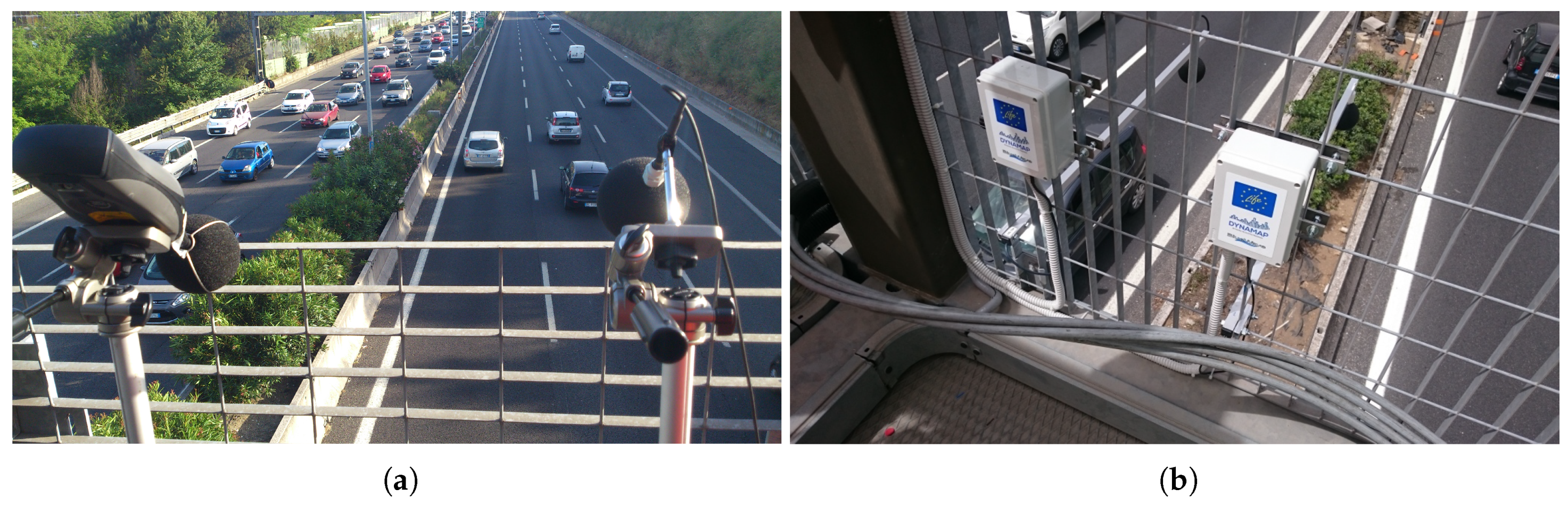
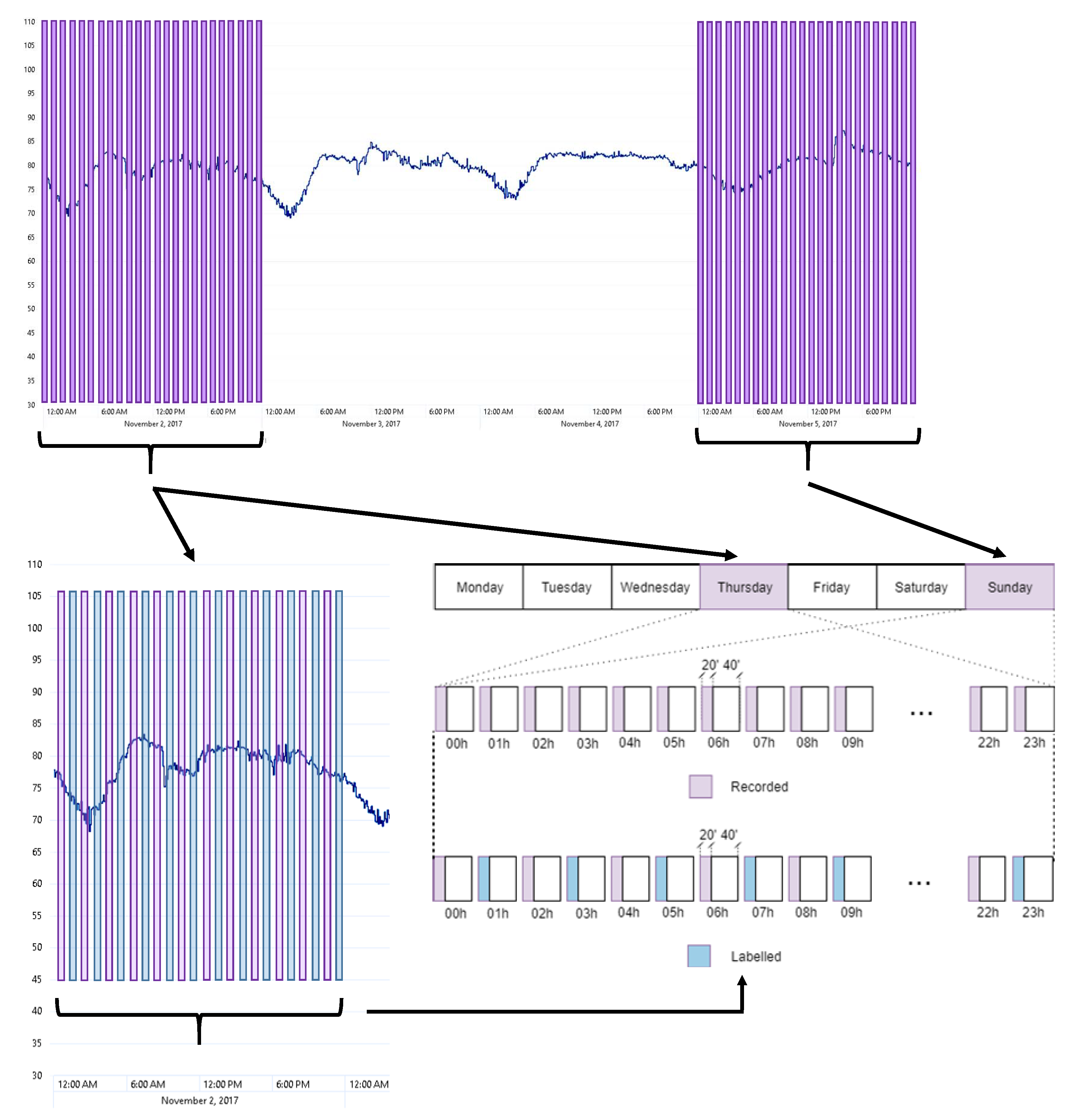
3.1. Description of the WASN-based Suburban Recording Campaign
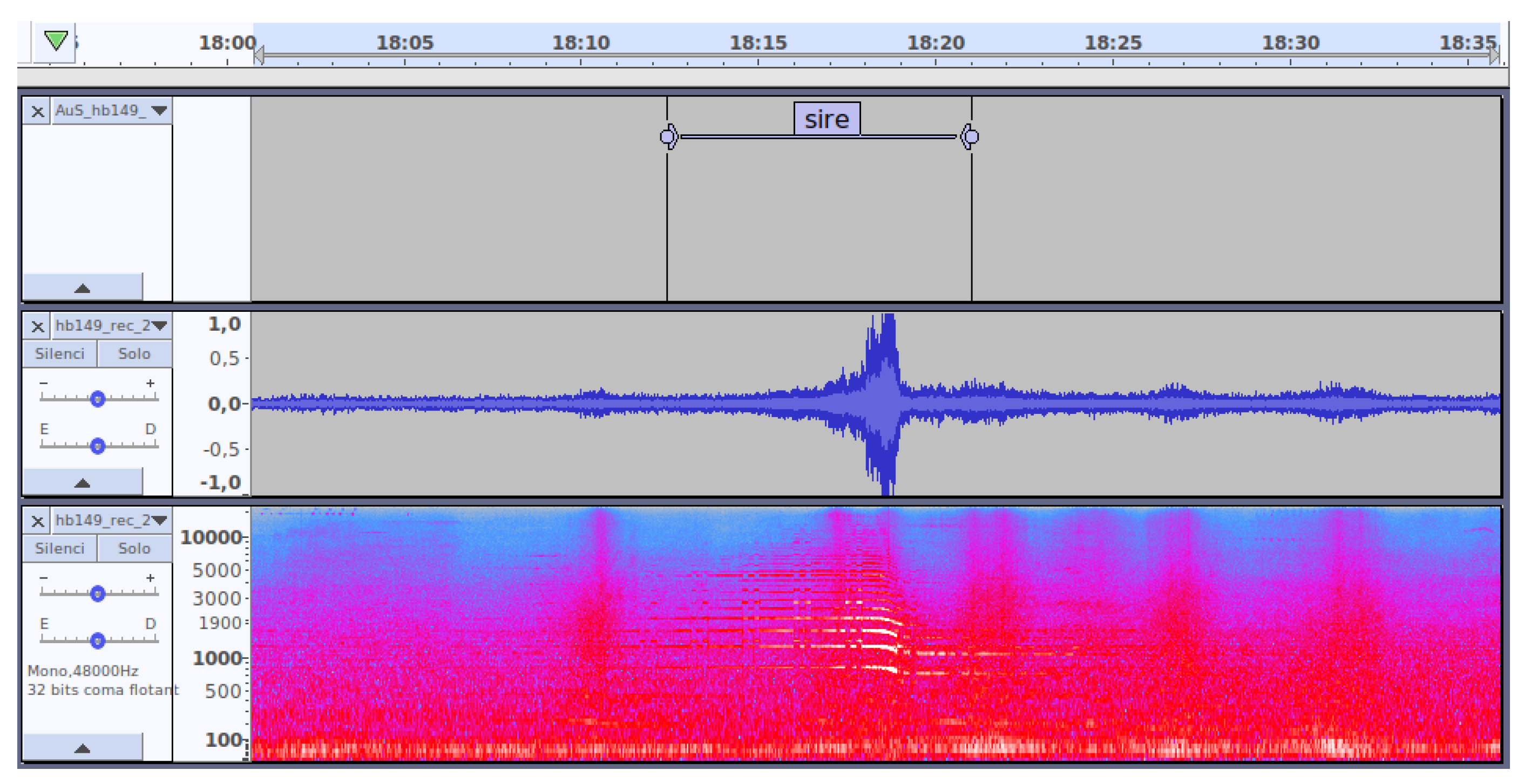
3.2. Data Labeling
- airp: airplanes.
- alrm: sounds of cars and houses alarm systems.
- bike: noise of bikes.
- bird: birdsong.
- brak: noise of brake or cars’ trimming belt.
- busd: opening bus or tramway, door noise, or noise of pressurized air.
- door: noise of house or vehicle doors, or other object blows.
- horn: horn vehicles noise.
- inte: interfering signal from ad industry or human machine.
- musi: music in car or in the street.
- rain: sound produced by heavy rain.
- sire: sirens of ambulances, police, fire trucks, etc.
- stru: noise of portals structure derived from its vibration, typically caused by the passing-by of very large trucks.
- thun: thunderstorm.
- tran: stop, start, and pass-by of trains.
- trck: noise when trucks or vehicles with heavy load passed over a bump.
3.3. Characterization of the ANEs
3.3.1. SNR Calculation
3.3.2. Impact Calculation
4. Dataset Analysis
4.1. General Characteristics
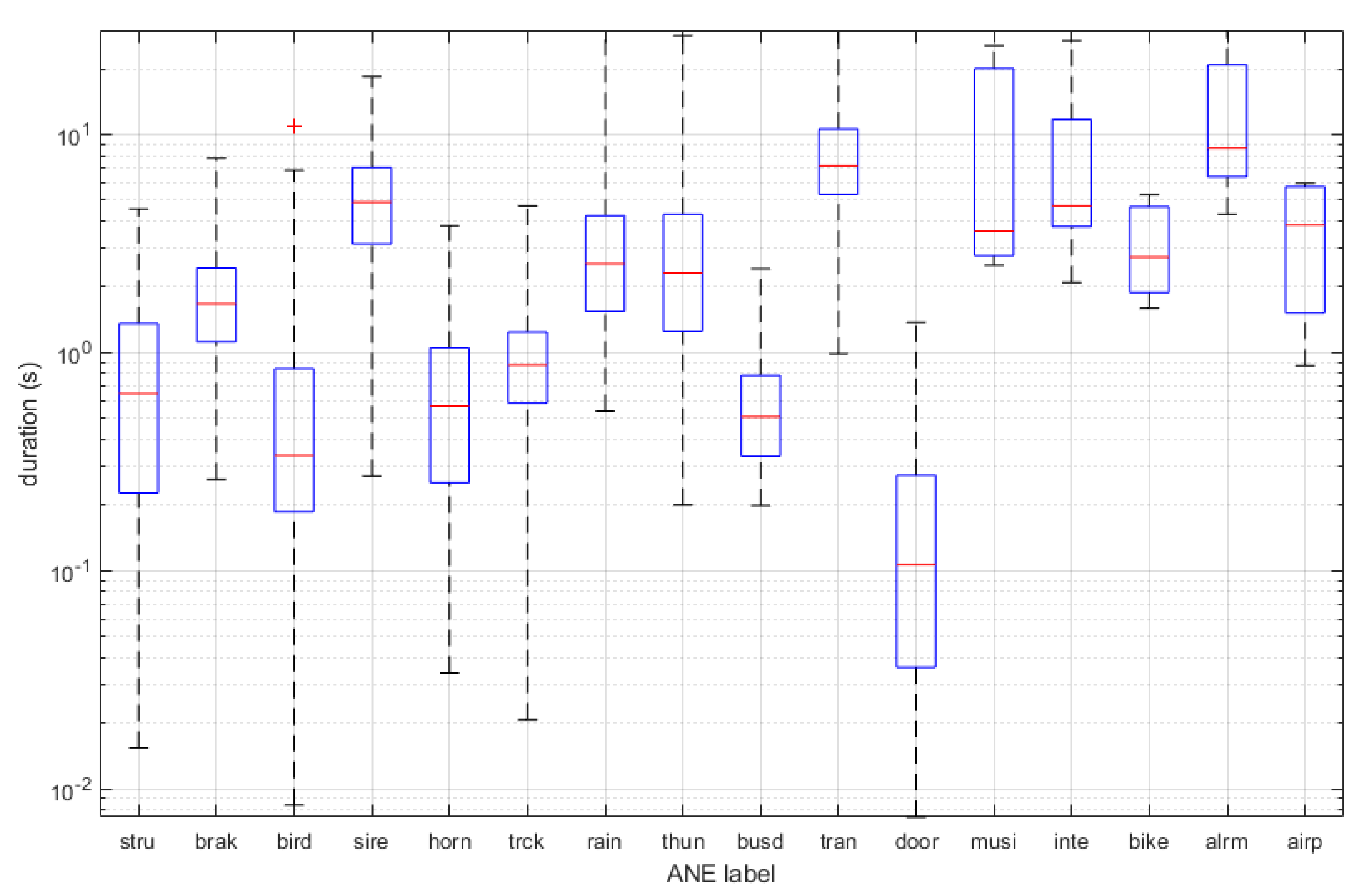
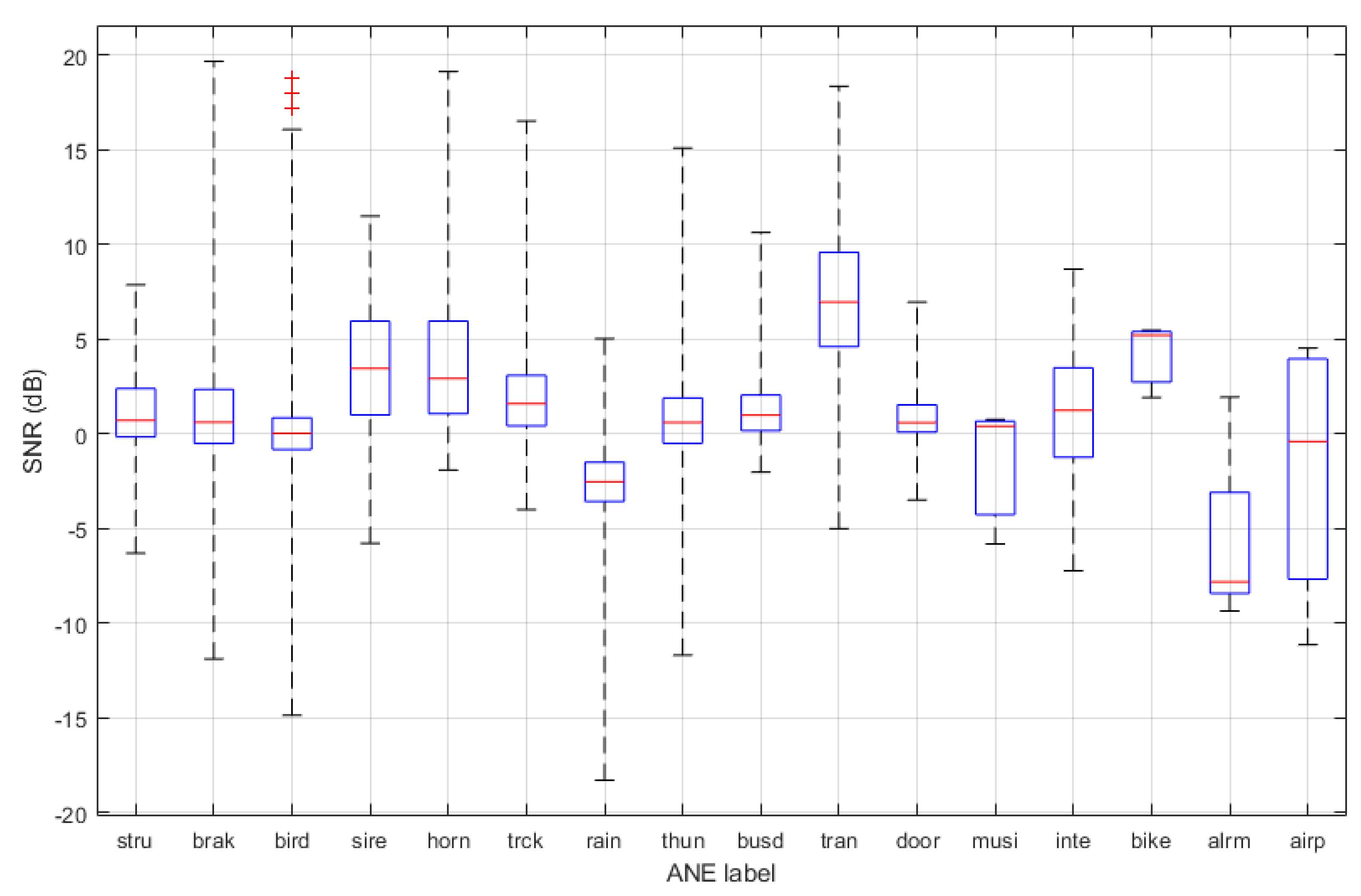
4.2. Overall Analysis
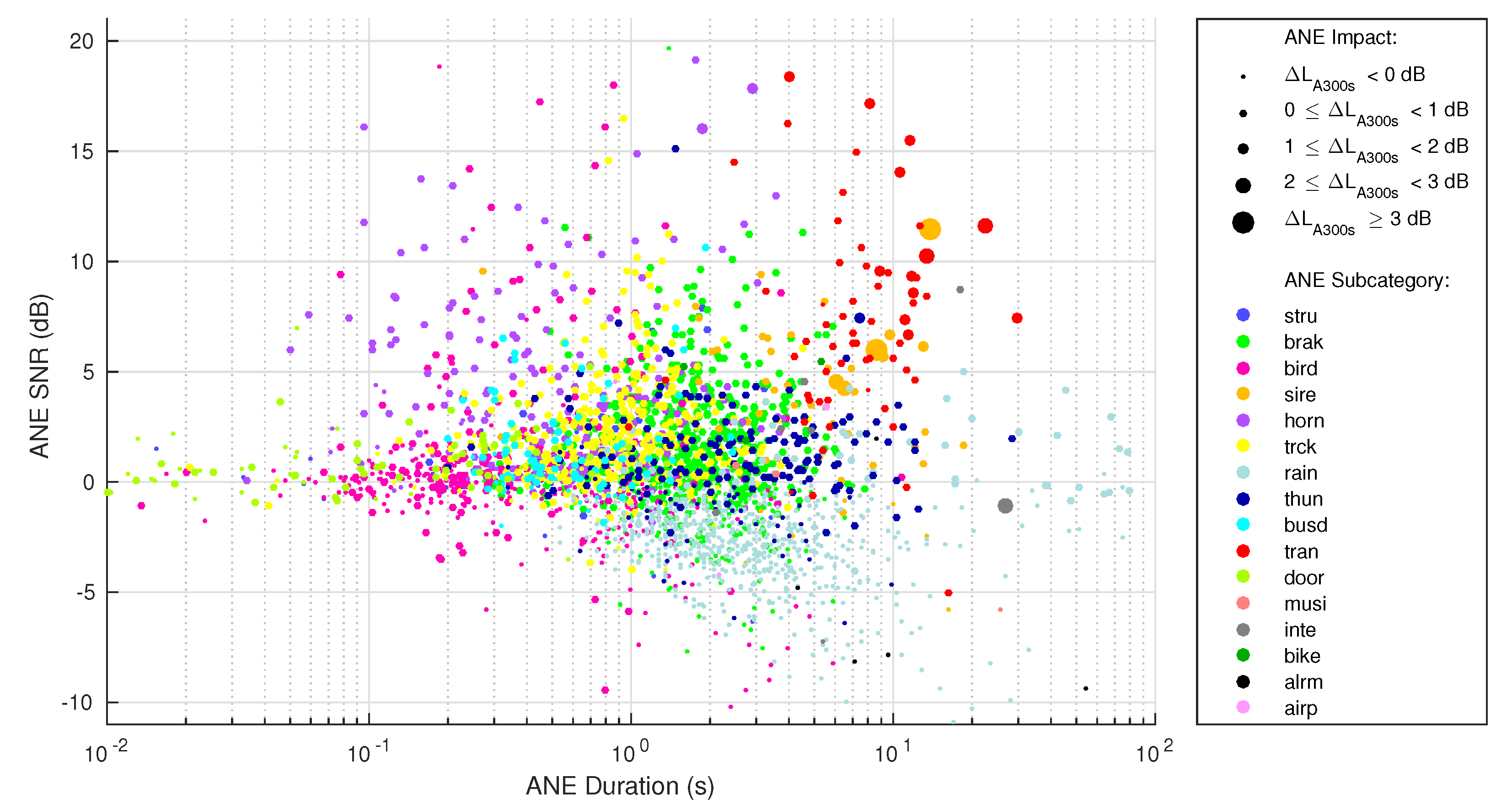
4.3. ANEs’ Impact on the
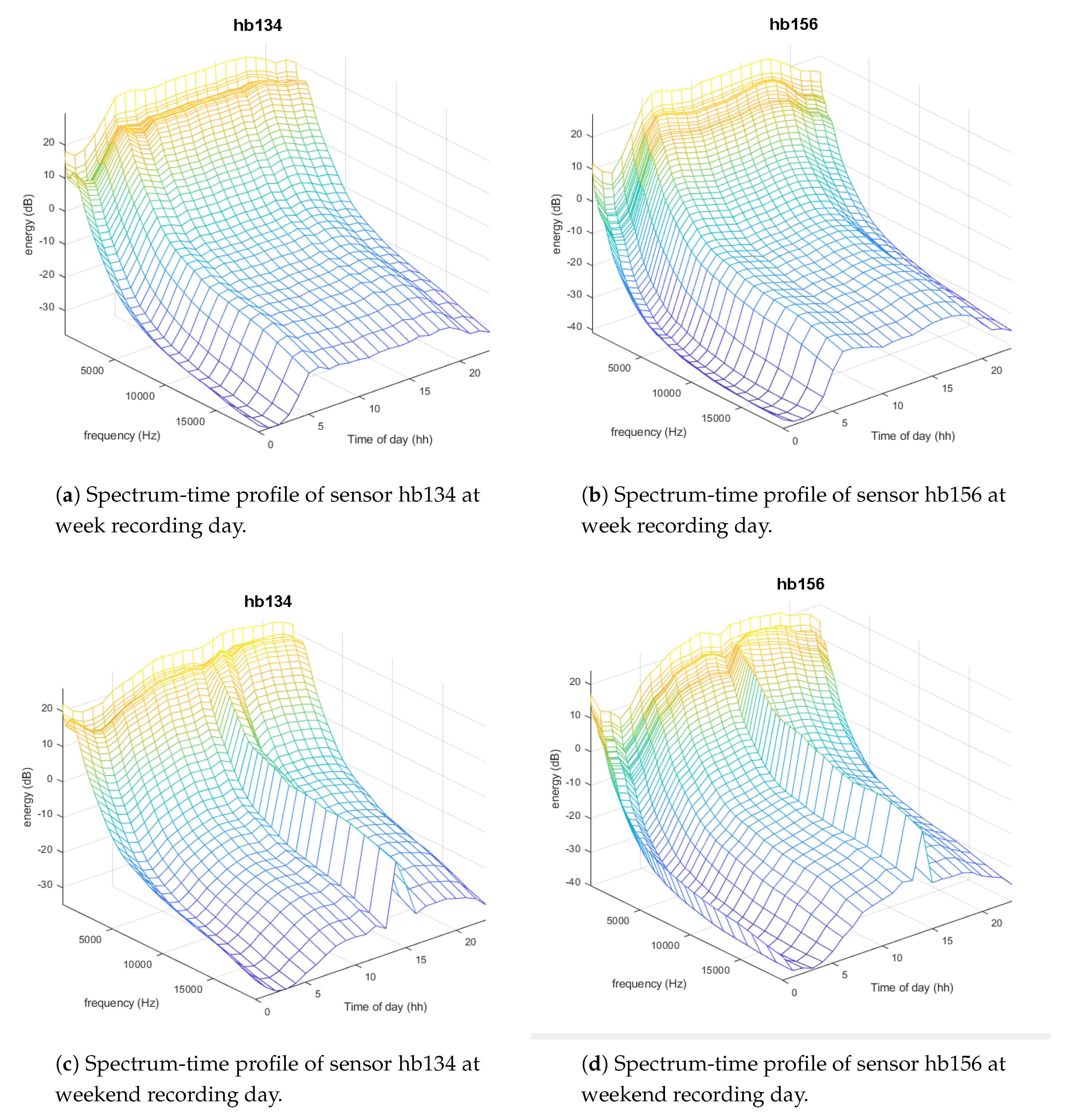
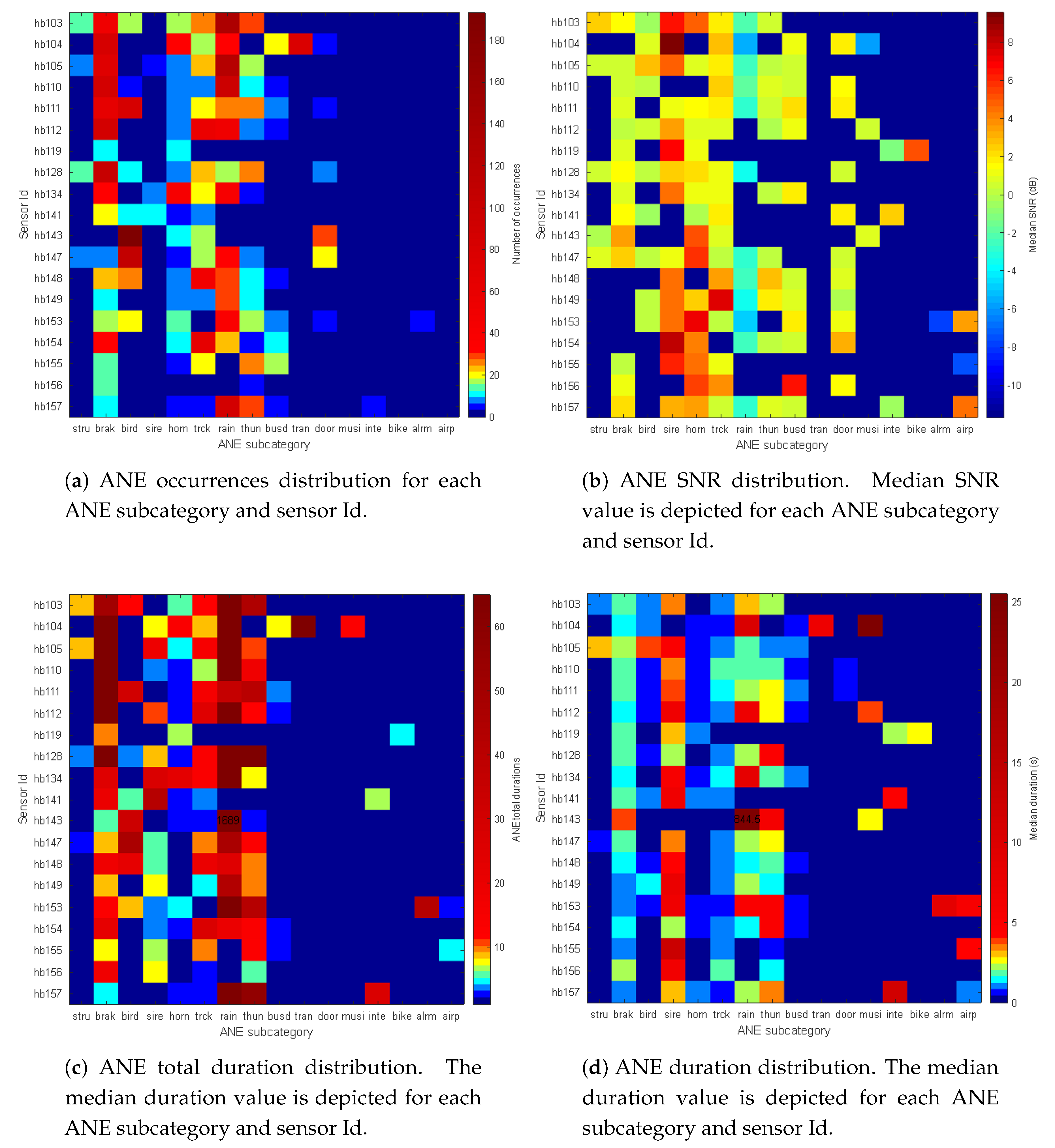
4.4. Node-Based Analysis
5. Discussion and Conclusions
5.1. WASN-Based Dataset Analysis vs. Expert-Based Dataset
5.2. WASN-Based Dataset and Node Homogeneity
5.3. Impact on the of the ANE Subcategories
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AED | Audio Event Detector |
| ANE | Anomalous Noise Event |
| ANED | Anomalous Noise Event Detection |
| BCK | Background Noise |
| CASA | Computational Scene and Event Analysis |
| CLEAR | Classification of Events, Activities and Relationships |
| DNN | Deep Neural Networks |
| DYNAMAP | Dynamic Noise Mapping |
| END | European Noise Directive |
| GTCC | Gammatone Cepstral Coefficients |
| MFCC | Mel-Frequency Cepstral Coefficients |
| RTN | Road-Traffic Noise |
| SED | Sound Event Detector |
| SONYC | Sounds of New York City |
| SNR | Signal-to-Noise Ratio |
| VPN | Virtual Private Network |
| WASN | Wireless Acoustic Sensor Network |
References
- Goines, L.; Hagler, L. Noise Pollution: A Modern Plague. South. Med. J. Birm. Ala. 2007, 100, 287–294. [Google Scholar] [CrossRef]
- Guite, H.; Clark, C.; Ackrill, G. The impact of the physical and urban environment on mental well-being. Public Health 2006, 120, 1117–1126. [Google Scholar] [CrossRef]
- Hänninen, O.; Knol, A.B.; Jantunen, M.; Lim, T.A.; Conrad, A.; Rappolder, M.; Carrer, P.; Fanetti, A.C.; Kim, R.; Buekers, J.; et al. Environmental burden of disease in Europe: Assessing nine risk factors in six countries. Environ. Health Perspect. 2014, 122, 439. [Google Scholar] [CrossRef] [PubMed]
- Bello, J.P.; Silva, C. SONYC: A System for Monitoring, Analyzing, and Mitigating Urban Noise Pollution. Commun. ACM 2019, 62, 68–77. [Google Scholar] [CrossRef]
- EU. Directive 2002/49/EC of the European Parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Commun. 2002, L189, 12–25. [Google Scholar]
- Manvell, D. Utilising the Strengths of Different Sound Sensor Networks in Smart City Noise Management. In Proceedings of the EuroNoise 2015, Maastrich, The Netherlands, 1–3 June 2015; EAA-NAG-ABAV: Maastrich, The Netherlands, 2015; pp. 2305–2308. [Google Scholar]
- Alías, F.; Alsina-Pagès, R.M. Review of Wireless Acoustic Sensor Networks for Environmental Noise Monitoring in Smart Cities. J. Sens. 2019. [Google Scholar] [CrossRef]
- Nencini, L.; De Rosa, P.; Ascari, E.; Vinci, B.; Alexeeva, N. SENSEable Pisa: A wireless sensor network for real-time noise mapping. In Proceedings of the EuroNoise 2012, Prague, Czech Republic, 10–13 June 2012; pp. 10–13. [Google Scholar]
- Botteldooren, D.; De Coensel, B.; Oldoni, D.; Van Renterghem, T.; Dauwe, S. Sound monitoring networks new style. In Proceedings of the Acoustics 2011, Gold Coast, Australia, 2–4 November 2011; Mee, D., Hillock, I.D., Eds.; Australian Acoustical Society: Queensland, Australia, 2011; pp. 93:1–93:5. [Google Scholar]
- Mietlicki, F.; Mietlicki, C.; Sineau, M. An innovative approach for long-term environmental noise measurement: RUMEUR network. In Proceedings of the EuroNoise 2015, Maastrich, The Netherlands, 1–3 June 2015; EAA-NAG-ABAV: Maastrich, The Netherlands, 2015; pp. 2309–2314. [Google Scholar]
- Camps-Farrés, J.; Casado-Novas, J. Issues and challenges to improve the Barcelona Noise Monitoring Network. In Proceedings of the EuroNoise 2018, Crete, Greece, 27–31 May 2018; EAA—HELINA: Heraklion, Crete, Greece, 2018; pp. 693–698. [Google Scholar]
- Bain, M. SENTILO—Sensor and Actuator Platform for Smart Cities. 2014. Available online: https://joinup.ec.europa.eu/document/sentilo-sensor-and-actuator-platform-smart-cities (accessed on 25 June 2018).
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radaelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; et al. DYNAMAP—Development of low cost sensors networks for real time noise mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- De la Piedra, A.; Benitez-Capistros, F.; Dominguez, F.; Touhafi, A. Wireless sensor networks for environmental research: A survey on limitations and challenges. In Proceedings of the 2013 IEEE EUROCON, Zagreb, Croatia, 1–4 July 2013; pp. 267–274. [Google Scholar]
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless Sensor Networks: A Survey on Recent Developments and Potential Synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- Bertrand, A. Applications and trends in wireless acoustic sensor networks: A signal processing perspective. In Proceedings of the 18th IEEE Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Ghent, Belgium, 22–23 November 2011; pp. 1–6. [Google Scholar]
- Griffin, A.; Alexandridis, A.; Pavlidiand, D.; Mastorakis, Y.; Mouchtaris, A. Localizing multiple audio sources in a wireless acoustic sensor network. Signal Process. 2015, 107, 54–67. [Google Scholar] [CrossRef]
- Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M. An Anomalous Noise Events Detector for Dynamic Road Traffic Noise Mapping in Real-Life Urban and Suburban Environments. Sensors 2017, 17, 2323. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Brown, G.J. Computational Auditory Scene Analysis: Principles, Algorithms, and Applications; Wiley-IEEE Press: New York, NY, USA, 2006. [Google Scholar]
- Giannoulis, D.; Benetos, E.; Stowell, D.; Rossignol, M.; Lagrange, M.; Plumbley, M.D. Detection and classification of acoustic scenes and events: An IEEE AASP challenge. In Proceedings of the 2013 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 20–23 October 2013; pp. 1–4. [Google Scholar]
- Foggia, P.; Petkov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Reliable detection of audio events in highly noisy environments. Pattern Recognit. Lett. 2015, 65, 22–28. [Google Scholar] [CrossRef]
- Mesaros, A.; Diment, A.; Elizalde, B.; Heittola, T.; Vincent, E.; Raj, B.; Virtanen, T. Sound event detection in the DCASE 2017 Challenge. IEEE/ACM Trans. Audio Speech Language Process. 2019, 27, 992–1006. [Google Scholar] [CrossRef]
- Alías, F.; Socoró, J.C. Description of anomalous noise events for reliable dynamic traffic noise mapping in real-life urban and suburban soundscapes. Appl. Sci. 2017, 7, 146. [Google Scholar] [CrossRef]
- Socoró, J.C.; Alsina-Pagès, R.M.; Alías, F.; Orga, F. Adapting an Anomalous Noise Events Detector for Real-Life Operation in the Rome Suburban Pilot Area of the DYNAMAP’s Project. In Proceedings of the EuroNoise, Crete, Greece, 27–31 May 2018. [Google Scholar]
- Nakajima, Y.; Sunohara, M.; Naito, T.; Sunago, N.; Ohshima, T.; Ono, N. DNN-based Environmental Sound Recognition with Real-recorded and Artificially-mixed Training Data. In Proceedings of the 45th International Congress and Exposition on Noise Control Engineering (InterNoise 2016), Hamburg, Germany, 21–24 August 2016; German Acoustical Society (DEGA): Hamburg, Germany, 2016; pp. 3164–3173. [Google Scholar]
- Mesaros, A.; Heittola, T.; Virtanen, T. TUT database for acoustic scene classification and sound event detection. In Proceedings of the 24th European Signal Processing Conference (EUSIPCO 2016), Budapest, Hungary, 28 August–2 September 2016; Volume 2016, pp. 1128–1132. [Google Scholar]
- Stowell, D.; Giannoulis, D.; Benetos, E.; Lagrange, M.; Plumbley, M.D. Detection and Classification of Acoustic Scenes and Events. IEEE Trans. Multimed. 2015, 17, 1733–1746. [Google Scholar] [CrossRef]
- Heittola, T.; Mesaros, A.; Eronen, A.; Virtanen, T. Context-dependent sound event detection. EURASIP J. Audio Speech Music Process. 2013, 2013, 1–13. [Google Scholar] [CrossRef]
- Foggia, P.; Petkov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Audio Surveillance of Roads: A System for Detecting Anomalous Sounds. IEEE Trans. Intell. Transp. Syst. 2016, 17, 279–288. [Google Scholar] [CrossRef]
- Zambon, G.; Benocci, R.; Bisceglie, A.; Roman, H.E.; Bellucci, P. The LIFE DYNAMAP project: Towards a procedure for dynamic noise mapping in urban areas. Appl. Acoust. 2017, 124, 52–60. [Google Scholar] [CrossRef]
- Bellucci, P.; Peruzzi, L.; Zambon, G. LIFE DYNAMAP project: The case study of Rome. Appl. Acoust. 2017, 117, 193–206. [Google Scholar] [CrossRef]
- Stowell, D.; Plumbley, M.D. An open dataset for research on audio field recording archives: Freefield1010. arXiv 2013, arXiv:1309.5275. [Google Scholar]
- Salamon, J.; Jacoby, C.; Bello, J.P. A dataset and taxonomy for urban sound research. In Proceedings of the 22nd ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014; pp. 1041–1044. [Google Scholar]
- Socoró, J.C.; Ribera, G.; Sevillano, X.; Alías, F. Development of an Anomalous Noise Event Detection Algorithm for dynamic road traffic noise mapping. In Proceedings of the 22nd International Congress on Sound and Vibration (ICSV22), Florence, Italy, 12–16 July; The International Institute of Acoustics and Vibration: Florence, Italy, 2015; pp. 1–8. [Google Scholar]
- Piczak, K.J. ESC: Dataset for Environmental Sound Classification. In Proceedings of the 23rd ACM International Conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 1015–1018. [Google Scholar]
- Rossignol, M.; Lafay, G.; Lagrange, M.; Misdariis, N. SimScene: A web-based acoustic scenes simulator. In Proceedings of the 1st Web Audio Conference (WAC), Paris, France, 26–28 January 2015; pp. 1–6. [Google Scholar]
- Gloaguen, J.R.; Can, A.; Lagrange, M.; Petiot, J.F. Estimating Traffic Noise Levels using Acoustic Monitoring: A Preliminary Study. In Proceedings of the Detection and Classification of Acoustic Scenes and Events 2016 (DCASE’2016), Budapest, Hungary, 3 September 2016; pp. 40–44. [Google Scholar]
- Çakır, E.; Parascandolo, G.; Heittola, T.; Huttunen, H.; Virtanen, T. Convolutional Recurrent Neural Networks for Polyphonic Sound Event Detection. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 1291–1303. [Google Scholar] [CrossRef]
- Salamon, J.; MacConnell, D.; Cartwright, M.; Li, P.; Bello, J.P. Scaper: A library for soundscape synthesis and augmentation. In Proceedings of the 2017 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 15–18 October 2017; pp. 344–348. [Google Scholar]
- Salamon, J.; Bello, J.P. Deep Convolutional Neural Networks and Data Augmentation for Environmental Sound Classification. IEEE Signal Process. Lett. 2017, 24, 279–283. [Google Scholar] [CrossRef]
- Temko, A.; Malkin, R.; Zieger, C.; Macho, D.; Nadeu, C.; Omologo, M. CLEAR Evaluation of Acoustic Event Detection and Classification Systems. In Multimodal Technologies for Perception of Humans: First International Evaluation Workshop on Classification of Events, Activities and Relationships, CLEAR 2006; Stiefelhagen, R., Garofolo, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 311–322. [Google Scholar]
- Temko, A. Acoustic Event Detection and Classification. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2007. [Google Scholar]
- Heittola, T.; Klapuri, A. TUT Acoustic Event Detection System 2007. In Multimodal Technologies for Perception of Humans. International Evaluation Workshops CLEAR 2007 and RT 2007; Stiefelhagen, R., Bowers, R., Fiscus, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 364–370. [Google Scholar]
- Van Grootel, M.W.W.; Andringa, T.C.; Krijnders, J.D. DARES-G1: Database of Annotated Real-world Everyday Sounds. In Proceedings of the NAG/DAGA Meeting 2009, Rotterdam, The Netherlands, 23–26 March 2009. [Google Scholar]
- Giannoulis, D.; Stowell, D.; Benetos, E.; Rossignol, M.; Lagrange, M.; Plumbley, M.D. A database and challenge for acoustic scene classification and event detection. In Proceedings of the 21st European Signal Processing Conference (EUSIPCO 2013), Marrakesh, Marocco, 9–13 September 2013; pp. 1–5. [Google Scholar]
- Mesaros, A.; Heittola, T.K.; Benetos, E.; Foster, P.; Lagrange, M.; Virtanen, T.; Plumbley, M.D. Detection and Classification of Acoustic Scenes and Events: Outcome of the DCASE 2016 Challenge. IEEE/ACM Trans. Audio Speech Lang. Process. 2018, 26, 379–393. [Google Scholar] [CrossRef]
- Mesaros, A.; Heittola, T.; Diment, A.; Elizalde, B.; Shah, A.; Vincent, E.; Raj, B.; Virtanen, T. DCASE 2017 challenge setup: Tasks, datasets and baseline system. In Proceedings of the DCASE 2017-Workshop on Detection and Classification of Acoustic Scenes and Events, Munich, Germany, 16–17 November 2017. [Google Scholar]
- Nencini, L. DYNAMAP monitoring network hardware development. In Proceedings of the 22nd International Congress on Sound and Vibration (ICSV22), Florence, Italy, 12–16 July 2015; The International Institute of Acoustics and Vibration (IIAV): Florence, Italy, 2015; pp. 1–4. [Google Scholar]
- Nencini, L. Progetto e realizzazione del sistema di monitoraggio nell’ambito del progetto Dynamap. In Proceedings of the 44∘ Congress of the Italian Acoustic Association, Pavia, Italy, 7–9 June 2017. [Google Scholar]
- International Electroacoustics Commission. Electroacoustics-Sound Level Meters-Part 1: Specifications (IEC 61672-1); International Electroacoustics Commission: Geneva, Switzerland, 2013. [Google Scholar]
- Nencini, L.; Bisceglie, A.; Bellucci, P.; Peruzzi, L. Identification of failure markers in noise measurement low cost devices. In Proceedings of the 45th International Congress and Exposition on Noise Control Engineering (InterNoise 2016), Hamburg, Germany, 21–24 August 2016; pp. 6362–6369. [Google Scholar]
- Orga, F.; Alías, F.; Alsina-Pagès, R.M. On the Impact of Anomalous Noise Events on Road Traffic Noise Mapping in Urban and Suburban Environments. Int. J. Environ. Res. Public Health 2017, 15, 13. [Google Scholar] [CrossRef] [PubMed]
- Pierre, R.L.S.; Maguire, D.J. The impact of A-weighting sound pressure level measurements during the evaluation of noise exposure. In Proceedings of the NOISE-CON 2004, Baltimore, MD, USA, 12–14 July 2004; pp. 1–8. [Google Scholar]
- Socoró, J.C.; Alsina-Pagès, R.M.; Alías, F.; Orga, F. Acoustic Conditions Analysis of a Multi-Sensor Network for the Adaptation of the Anomalous Noise Event Detector. Proceedings 2019, 4, 51. [Google Scholar] [CrossRef]
- Valero, X.; Alías, F. Gammatone Cepstral Coefficients: Biologically Inspired Features for Non-Speech Audio Classification. IEEE Trans. Multimed. 2012, 14, 1684–1689. [Google Scholar] [CrossRef]
- Orga, F.; Alsina-Pagès, R.M.; Alías, F.; Socoró, J.C.; Bellucci, P.; Peruzzi, L. Anomalous Noise Events Considerations for the Computation of Road Traffic Noise Levels in Suburban Areas: The DYNAMAP’s Rome Case Study. In Proceedings of the 44° Congress of the Italian Acoustic Association, Pavia, Italy, 7–9 June 2017. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Number of Occurrences | Total Duration (s) |
|---|---|---|
| ANE | 3170 | 10,752.9 |
| rain | 754 | 6413.5 |
| brak | 737 | 1387.2 |
| thun | 236 | 753.4 |
| tran | 76 | 655.7 |
| trck | 380 | 382.4 |
| bird | 482 | 338.9 |
| sire | 55 | 327.8 |
| horn | 210 | 165.7 |
| alrm | 5 | 84.3 |
| inte | 8 | 69.4 |
| busd | 88 | 56.6 |
| stru | 46 | 45.8 |
| musi | 3 | 31.6 |
| door | 83 | 16.3 |
| airp | 4 | 14.5 |
| bike | 3 | 9.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsina-Pagès, R.M.; Orga, F.; Alías, F.; Socoró, J.C. A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping. Sensors 2019, 19, 2480. https://doi.org/10.3390/s19112480
Alsina-Pagès RM, Orga F, Alías F, Socoró JC. A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping. Sensors. 2019; 19(11):2480. https://doi.org/10.3390/s19112480
Chicago/Turabian StyleAlsina-Pagès, Rosa Ma, Ferran Orga, Francesc Alías, and Joan Claudi Socoró. 2019. "A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping" Sensors 19, no. 11: 2480. https://doi.org/10.3390/s19112480
APA StyleAlsina-Pagès, R. M., Orga, F., Alías, F., & Socoró, J. C. (2019). A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping. Sensors, 19(11), 2480. https://doi.org/10.3390/s19112480