1. Introduction
Terahertz (THz) waves lie between microwaves and infrared waves in the electromagnetic spectrum, and they have many special characteristics. Among the numerous applications of THz waves, THz imaging techniques have been receiving sustained attention in recent years due to several exciting advantages of THz waves. Compared to microwaves, with THz radiation it is easier to achieve higher carrier frequency and larger absolute bandwidth, which provide higher spatial resolution and more details of objects. Besides, THz waves can achieve imaging at higher frame rates, and can be used in video synthetic aperture radar (ViSAR) imaging. Compared to infrared waves, THz waves have the ability to penetrate non-metallic and liquid non-polar materials, which makes it possible to realize perspective imaging. In addition, the lower photon energy of THz waves nearly causes no harm to the human body under safety inspection. All these characteristics lead to promising prospects in biomedical imaging [
1], stand-off detection for imaging [
2,
3], and synthetic aperture radar (SAR)/inverse synthetic aperture radar (ISAR) imaging [
4,
5].
With the noticeable progress of THz sources and detectors over the past few decades, the imaging and recognition with THz radar systems becomes possible. Until now, THz radar imaging systems could be divided into three main categories: raster-scanning radar systems, mixed-scanning radar systems, and SAR/ISAR systems. A raster-scanning radar system uses several lenses to focus the beam onto a fixed area, and the image is obtained by recording the data of each scanning area when scanning along an object. One of the leading institutions in this area is the Jet Propulsion Laboratory (JPL, Pasadena, CA, USA). From 2006 to 2014, they presented serious radar systems with different operating frequencies and bandwidths, and achieved sub-centimeter resolution over a 4–25 m distance [
2,
6,
7,
8,
9,
10]. Another representative institution is the Pacific Northwest National Laboratory (PNNL, WA, USA). In 2009, they presented a standoff, three-dimensional (3-D) imaging prototype that operates near 0.35 THz [
3,
11]. This system allows screening at ranges of 2–10 m with sub-centimeter resolution, and can obtain an image in 10 s. The imaging frame rate of these systems is determined by the number of scanning pixels and oscillation frequency of the scanning mirrors, so it is time-consuming to acquire a target image. Furthermore, the system structure is complex and easily damaged.
Compared to the raster-scanning radar system, the mixed-scanning radar system substitutes one-dimensional (1-D) raster scanning with 1-D mechanical scanning or 1-D electrical scanning, and the imaging speed can be greatly improved. In 2012, the Chinese Academy of Sciences (CAS, Beijing, China) proposed a 0.22 THz radar system based on the combination of fan-beam scanning and aperture synthesized reconstruction techniques [
12,
13,
14]. The high resolution in the horizontal and vertical direction is achieved by the narrow side of the fan-beam through raster scanning and synthetic aperture through mechanical scanning, respectively. The imaging resolution is about 7 mm in the horizontal direction and better than 4 mm in the vertical direction, and the image reconstruction time is less than 3 s. In 2018, China Academy of Engineering Physics (CAEP, Mianyang, Sichuan) and National University of Defense Technology (NUDT, Changsha, Hunan) presented a 0.34 THz radar system [
15,
16]. This system incorporates a multiple-input multiple-output (MIMO) array as an electronic beam former in the horizontal dimension and an elliptic cylinder as a focusing reflector in the vertical dimension. The imaging resolution is about 14 mm in the horizontal direction and 12 mm in the vertical direction at a distance of 3 m, and the image reconstruction time is less than 1 s. Although the mixed-scanning radar system can operate near real time, there still exist some defects: (1) the target needs to be stationary; (2) the imaging field of view is limited.
SAR/ISAR systems acquire the target image through relative motion between the radar and target [
17,
18,
19,
20]. The resolution depends on the bandwidth of sweep signal and the length or relative rotation angle of synthetic aperture. The Research Institute for High Frequency Physics and Radar Techniques (FGAN-FHR, Dortmund, Germany) has performed serious studies on SAR/ISAR imaging systems in the THz band. In 2007, they presented a 0.22 THz terahertz imaging radar system COBRA-220 which realized a 1.8 cm resolution at a distance of 135 m [
21]. In 2013 and 2015, they continuously developed a 0.3 THz system and carried out SAR/ISAR imaging experiments on complex targets such as car and bicycle [
4,
22]. The system bandwidth is 40 GHz which realizes a 3.75 mm resolution. In 2012, the US Defense Advanced Research Projects Agency (DARPA, Arlington, Virginia, USA) presented the ViSAR program. The program aims to achieve moving targets tracking and imaging with video frame rate. They have carried out the ViSAR experiments with a 0.235 THz one-input four-output system, and obtained the real-time high-resolution SAR image of moving targets [
23]. Beside the above two forerunners, other organizations also started to develop SAR/ISAR systems and many remarkable achievements had been made [
5,
24,
25,
26,
27,
28]. Compared to the other THz radar systems, the SAR/ISAR system has a relative simple system structure and low hardware cost, and has no limitation of target distance. However, The SAR/ISAR system can only capture the projected two-dimensional (2-D) characteristics of the target, which lose the altitude information.
In this paper, we present a 0.22 THz all-electronic one-input four-output imaging radar system. The radar system operates in frequency modulated pulse mode with a bandwidth of 5 GHz, and its pulse width, duty circle, and time delay of local oscillator signal can be set flexibly. This design is for the application of connecting traveling-wave tube amplifier to develop long-distance experiments in the future. Compared with the single-channel SAR/ISAR imaging system, our system can achieve 3-D images of objects through interferometry technique [
29,
30,
31], where the altitude information can be obtained from the phase difference of ISAR images of different receiving channels. To verify the system performance, interferometric inverse synthetic aperture radar (InISAR) imaging experiments were carried out, and necessary signal processing methods had been applied to acquire high-quality InISAR images.
The remainder of this paper is organized as follows:
Section 2 describes the structure and performance of the multi-channel THz radar system.
Section 3 describes the signal model of InISAR imaging.
Section 4 presents a serious of signal processing methods of radar echoes.
Section 5 gives the experimental results and performance analyses. Finally,
Section 6 summarizes this paper.
2. 0.22 THz Multi-Channel Radar System
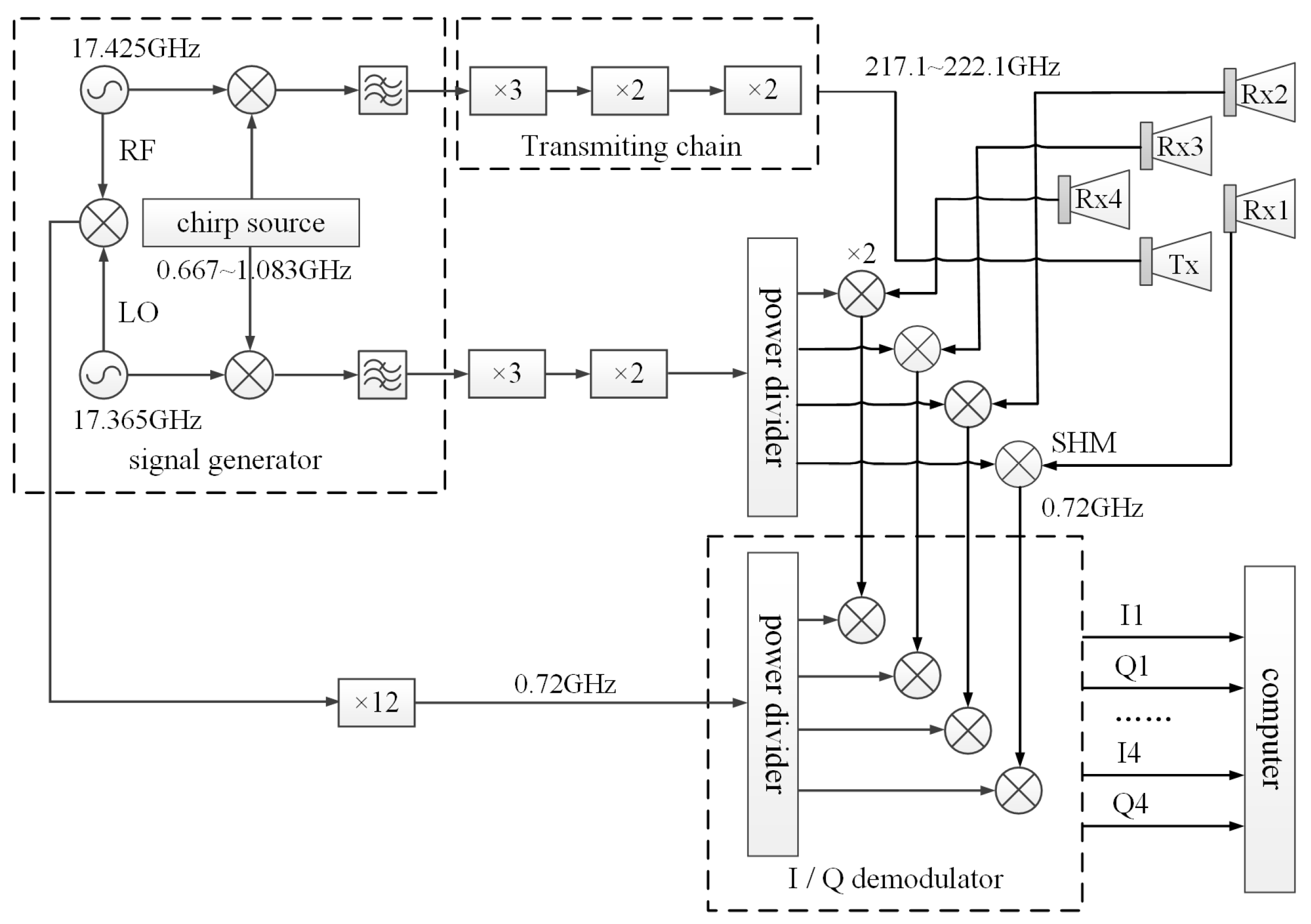
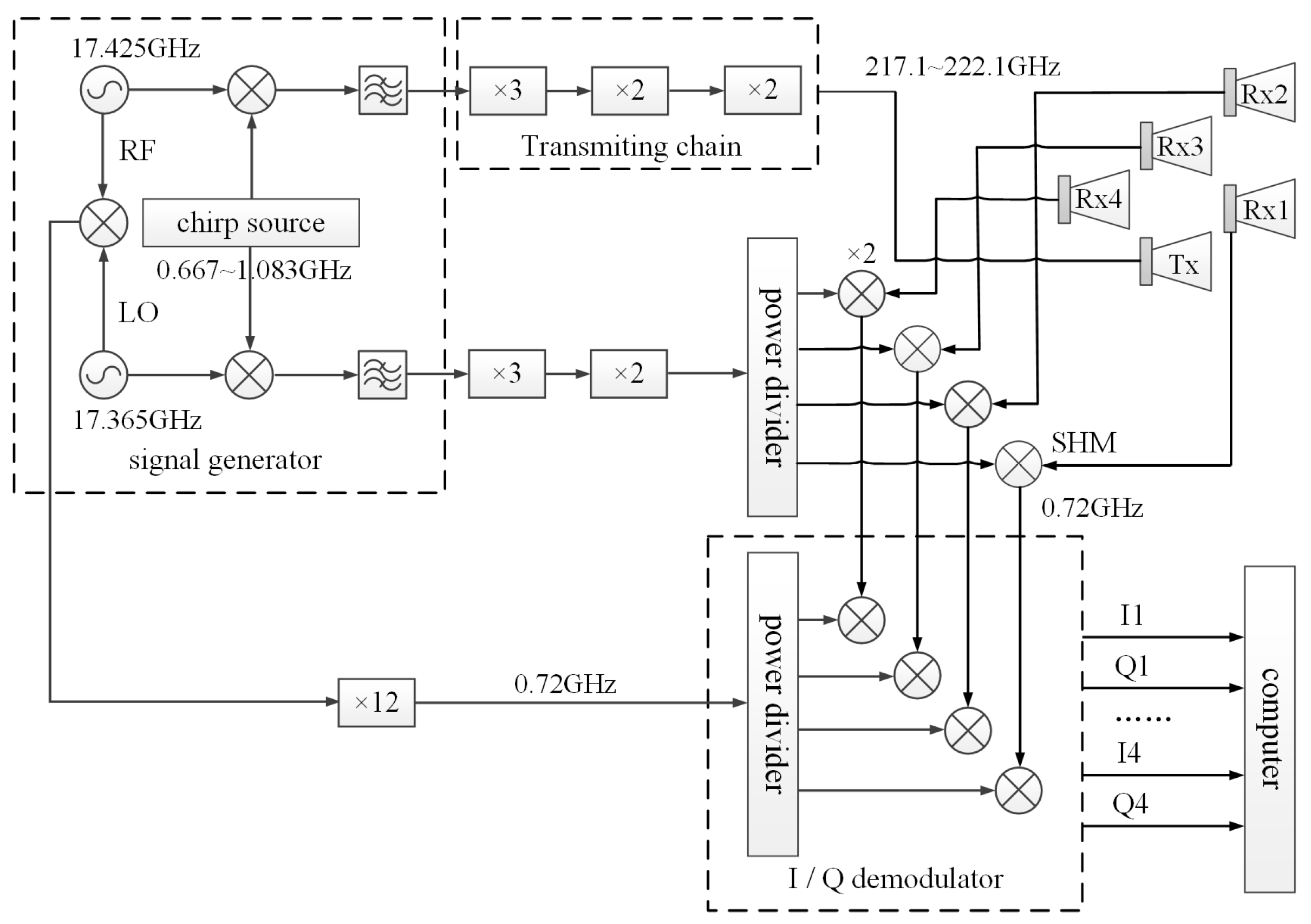
The radar system is based on linear frequency modulated (LFM) pulse principle and has a synthetic bandwidth of 5 GHz. The transmitter is a chirped signal from 217.1 GHz to 222.1 GHz, thereby realizing a 3 cm theoretical range resolution. The echo signals are received by four receiving channels simultaneously. The schematic diagram of the radar system is shown in
Figure 1. The 0.22 THz multi-channel radar system consists of five modules: the signal generator, radio frequency (RF) front-end, intermediate frequency (IF) processing module, data acquisition module, and cone-shaped horn antennas.
The power loss of the mixer in this radar system is up to 9 dB, one sweep signal source can hardly drive the transmit chain and receive chain together. Besides, the signal bandwidth of THz radar system is so large that it is difficult to directly sample a THz wideband signal using the analog-digital converter, let alone the system has four receiving channels. To solve these problems, the system adopts the super-heterodyne architecture and two sweep signal sources are used to drive the transmit chain and receive chain respectively. This method expands bandwidth of the RF signal by frequency multiplication of a Ku-band signal because it is easy to achieve characteristics of high stability, high power, low phase noise, and low spur. The echo signal to be sampled is transformed to zero IF based on twice mixing processing, which greatly reduces the demand for the sampling rate.
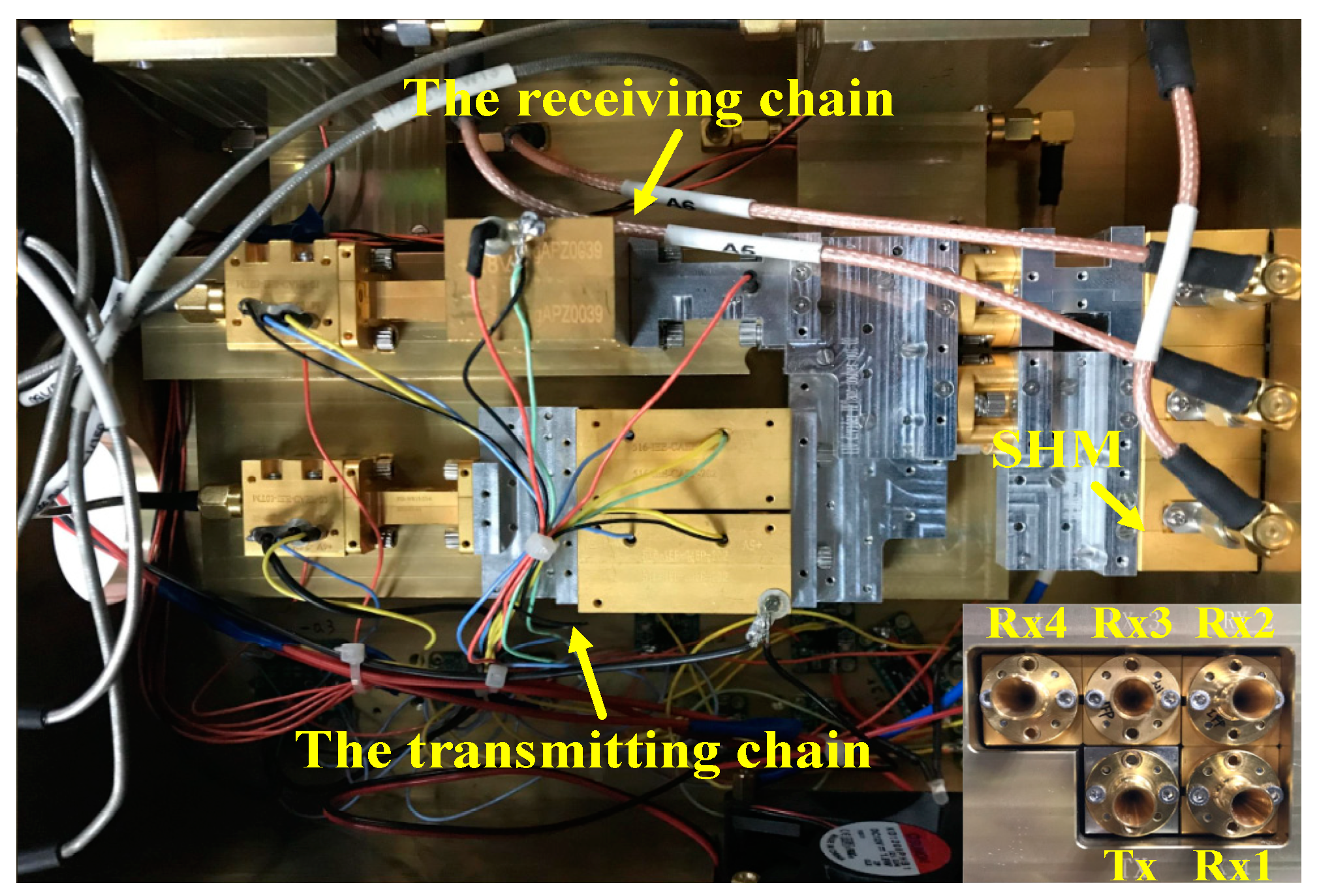
The wideband sweep signal of transmitting end is generated by 12× multiplier up-converting a chirp signal from 0.667 GHz to 1.083 GHz with a fixed frequency signal at 17.425 GHz. The 0.22 THz frequency multiplier is designed based on GaAs planar Schottky diodes, and its structure is very simple. A planar Schottky varactor flip chip with four anodes arranged in anti-series is mounted onto a quartz based microstrip circuit to realize frequency multiplication. The maximum output power of the transmitter is 14 dBm, and the power flatness is within ±1 dB. The 0.22 THz subharmonic mixer (SHM), used for frequency down-converting in Rx chain, is also designed based on low parasitic component Schottky diodes, and suspended microstrip structure is employed. The conversion loss of the mixer is 9 dB. In order to achieve an ideal range resolution, a good linearity of the chirp signal is necessary. The chirp source in our system is achieved by field programmable gate array (FPGA) and digital-analog converter (DAC) with direct digital synthesis technique, which ensures a high linearity with ns-scale hopping time. The two fixed frequency signals at 17.425 GHz and 17.365 GHz are directly achieved by two coherent phase-locked oscillators and a temperature compensated crystal oscillator, and provide reference frequency for the whole radar system. Based on this signal generation method, the center frequency and bandwidth of the chirp source can be changed flexible according to the future requirement. The sweep pulse width can be set from 10 us to 1 ms, and the pulse repetition frequency can be set from 250 Hz to 10,000 Hz.
The echo signals are mixed using a sub-harmonic mixer (SHM) pumped by the local oscillator (LO) signal after power allocation in each channel, and the output of SHM is an IF signal with the center frequency of 0.72 GHz. In order to acquire the baseband signal, the IF signals of four channels are demodulated in four IQ demodulators and sampled by a high-speed ADC. The in-band noise figure and noise temperature are measured as 6–8 dB and 1200–2080 K, respectively, based on the Y factor method. The receiver bandwidth is 20 MHz and the receiver sensitivity is −80 dBm. The insertion loss and isolation of the power divider are 3 dB and 15 dB, respectively.
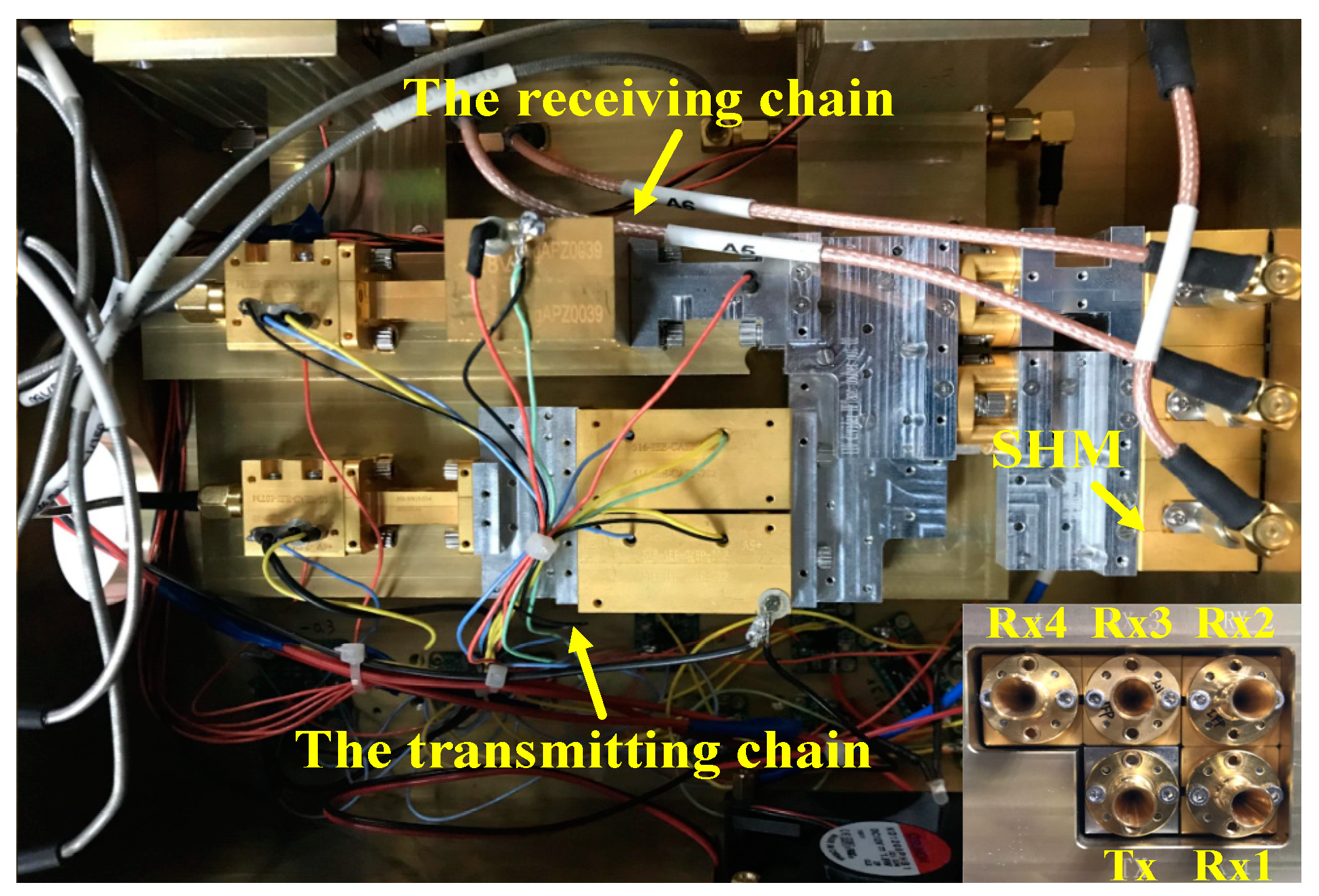
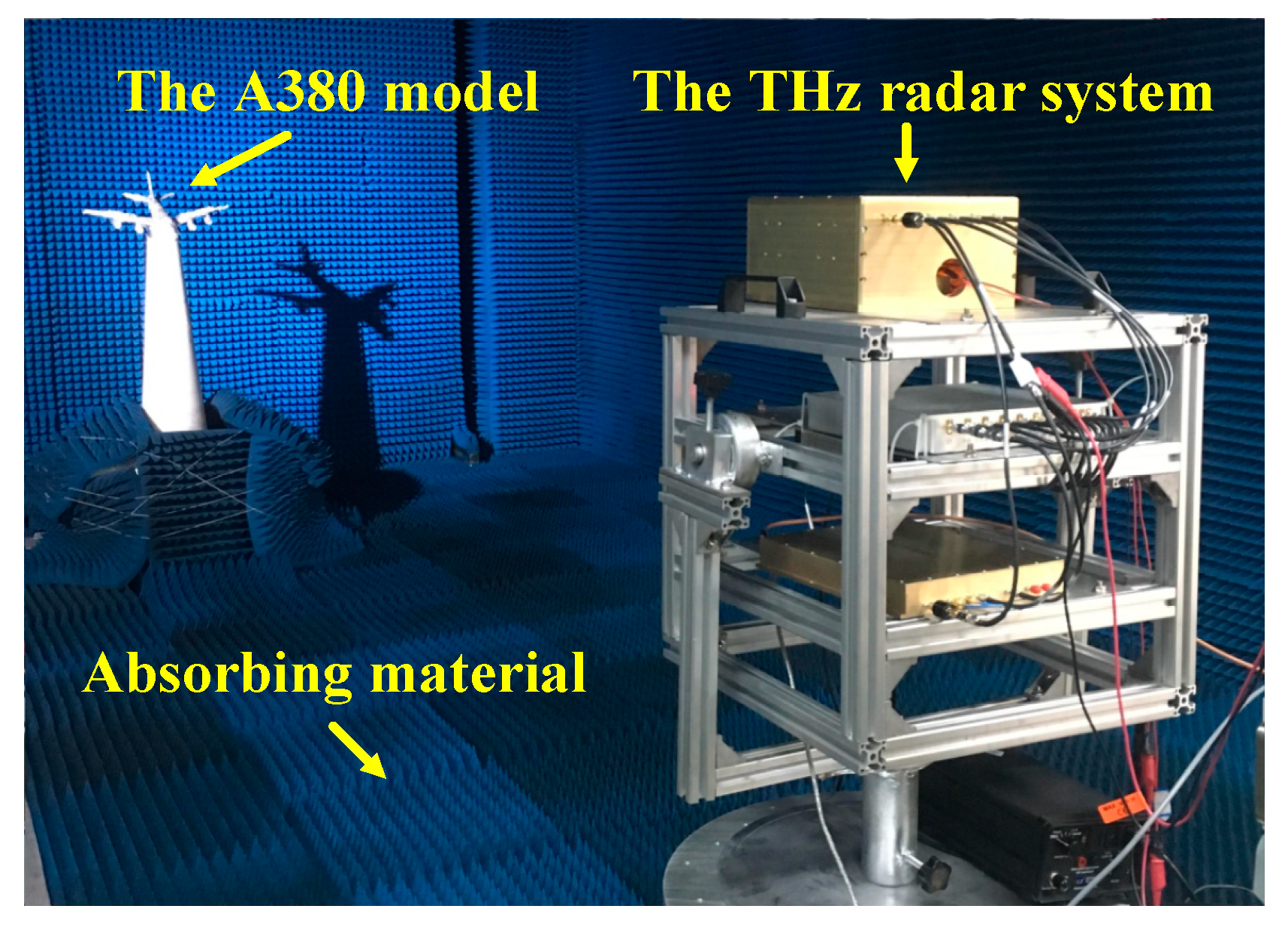
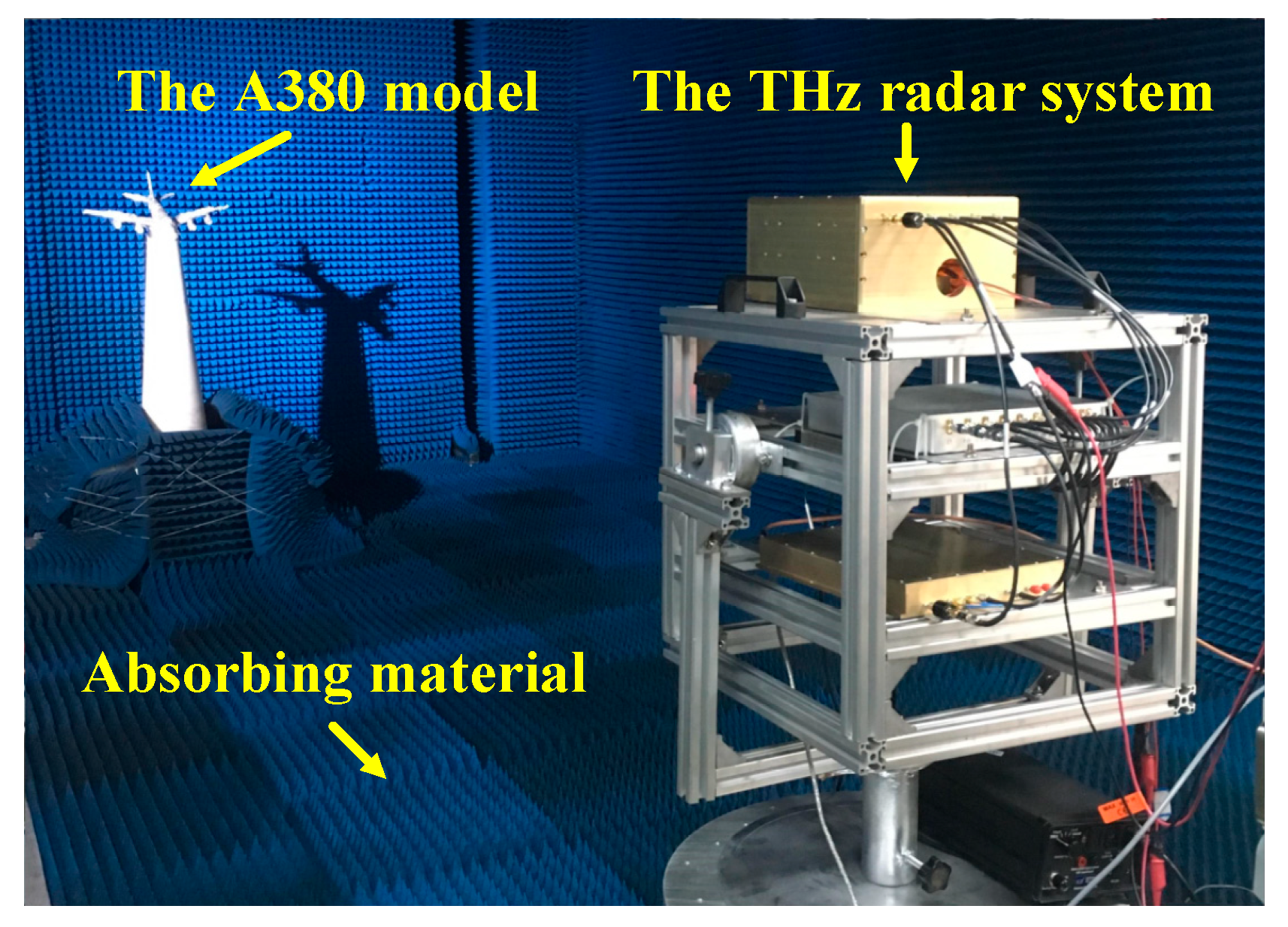
The five antennas are distributed in two rows with three receiving antennas in the upper row, and one transmitting antenna and one receiving antenna in the other row. The gain of the five cone-shaped horn antennas is 25 dB. Rx1 and Rx2 form the vertical interferometric baseline, and the baseline length is 2.1 cm. Rx2 and Rx3 or Rx2 and Rx4 form the horizontal interferometric baseline, and the baseline length is 2.1 cm and 4.2 cm, respectively. In the InISAR imaging experiments, Rx4 is neglected. This array configuration can be flexible changed by connecting external waveguide. The photograph of the front-end setup is shown in
Figure 2. Besides InISAR imaging, this system also has many other potential applications such as InSAR imaging, ViSAR imaging, and micro-motion target 3-D imaging.
3. Signal Model of InISAR Imaging
After range alignment and auto-focus processing [
32,
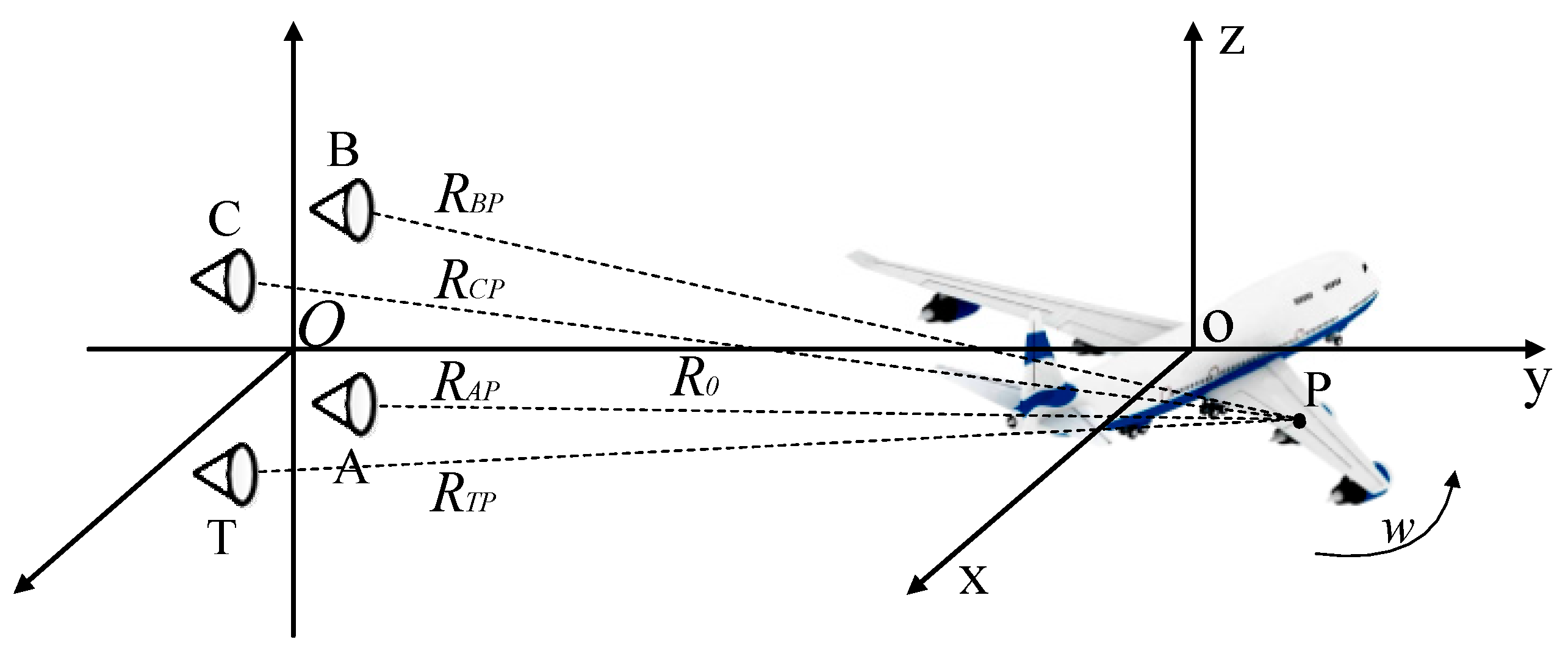
33], the InISAR imaging geometry can be simplified as turntable imaging model, and the geometry is shown in
Figure 3. The antenna A, B, and C correspond to the antenna Rx1, Rx2, and Rx3 in
Figure 2. Antenna T acts as the transmitter only, and antennas A, B, and C operate at the receiving mode only. A target coordinate system o-xyz is built on the target, where o denotes the center of turntable.
) is an arbitrary scattering point located on the target.
denotes the vertical distance from coordinate origin o to the antenna plane,
w denotes the rotation rate of target, and
,
,
and
denote the initial distances from P to four antennas, respectively. The coordinates of T, A, B, and C are
,
,
and
, respectively. The transmitting LFM pulse from antenna
T is:
where:
is the pulse width, is the slow time, is the fast time, is the full time, is the carrier frequency, and is the chirp rate.
Ignore the signal envelope and the received signal at receiver
i (
i = A, B, C) from P is:
where
c is the wave propagation velocity,
is the reflection coefficient of
P, and
represents the distance from receiver
i to scattering point
P at time
t.
The echo signals are processed with a dechirping manner and residual video phase (RVP) correction, and the expression of the radar echo becomes:
For the InISAR imaging, the distance from antennas to the turntable center is far larger than the size of target, thus the assumption of plane wave model is generally applied to simplify the signal expression. In this assumption, the radar echo can be expressed as:
If the coherent accumulation angle
θ is small enough to feed the range-Doppler imaging condition [
20], the approximations
,
,
, and
are applied to further simplify the radar echo expression. Perform keystone transformation and 2-D Fourier transformation on the radar echoes, the target ISAR images of three received channels can be reconstructed as:
where
is the scattering intensity of scattering point P in the ISAR images,
is the data acquisition time,
B is the radar bandwidth,
is radar wavelength.
and
(
) denote the constant phase and interferometric phase, and they are expressed as:
The above formulas show that the target coordinates can be calculated through Equations (6)–(8), (10) and (11). To avoid the phase wrapping, the absolute value of
and
should be less than
π, and we can calculate that the unambiguous size of the target is:
4. Signal Processing Method
4.1. Compensation of Signal Nonlinearity and Phase Inconsistency
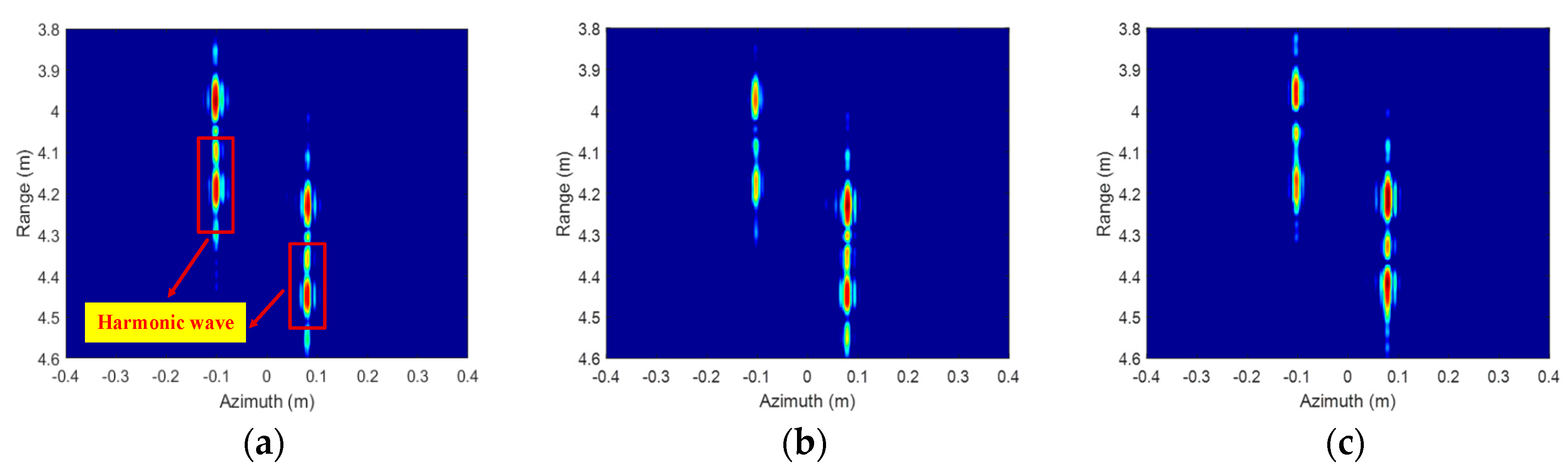
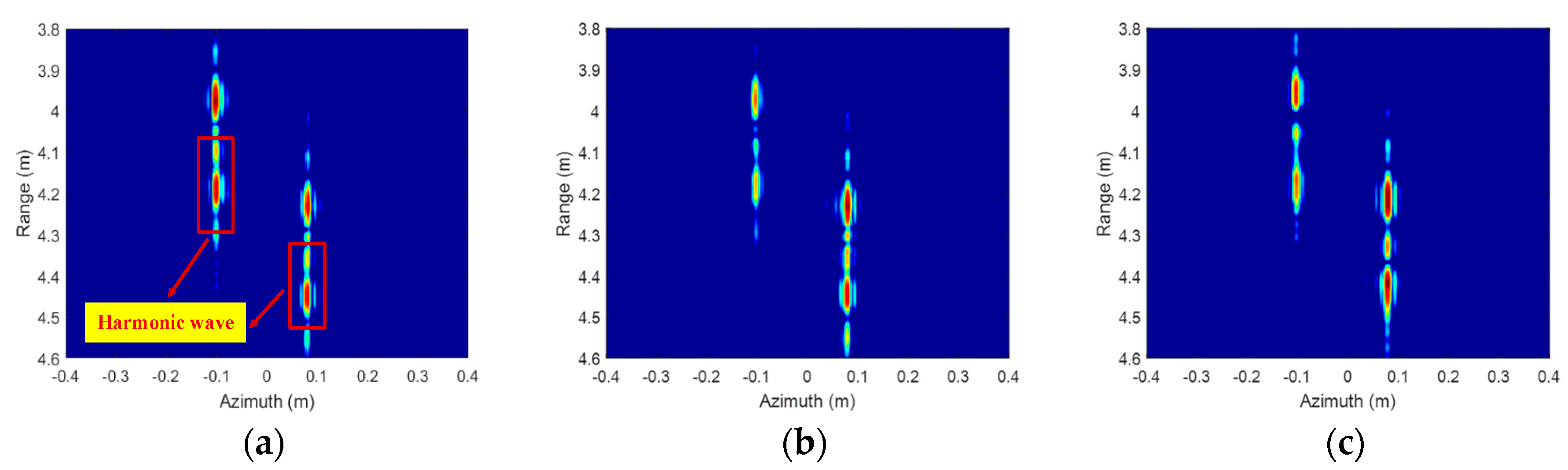
In an ideal condition, the frequency of the transmitted wideband sweep signal varies linearly, and the stationary phases of three received signals are identical. Thus, the range resolution will reach the theoretical value
, and the coordinates of the InISAR images accord with the real position of target. In practice, the conversion efficiencies of the high-frequency power amplifiers and multipliers in the transmitting and receiving chains are not flat across the radar bandwidth, which will result in the disturbances of the amplitude and phase in the terahertz wideband signals, and the chirp rate is no longer a constant. This phenomenon will seriously deteriorate the range resolution, even lead to the appearance of harmonics. Moreover, the stationary phases of radar echoes received by different receiving channels are inconsistent because they transmit through different antennas and electrical connecters, and the phase modulation characteristics of these devices are different. It will destroy the real phase relation of the ISAR images of different receiving channels, and make the InISAR imaging results no longer match the real position of target. Take these non-ideal factors into consideration, the radar echo and LO signal can be expressed as:
where
is the RF signal amplitude,
is the LO signal amplitude,
is the phase-error function,
(
i = A, B, C) is the initial stationary phase, and
is the round trip time.
After the mixing processing and RVP correction, the IF signal is described as:
In the THz radar system, the nonlinearities of and are not the same, and the phase term will deteriorate the system performance even if the time delay is small enough to be neglected. The existence of brings an error to the interferometric phase in Equations (10) and (11), which will lead to coordinates location error even phase wrapping in the InISAR imaging results.
To compensate the frequency nonlinearity and phase inconsistency of the multi-channel THz radar system, the phase term
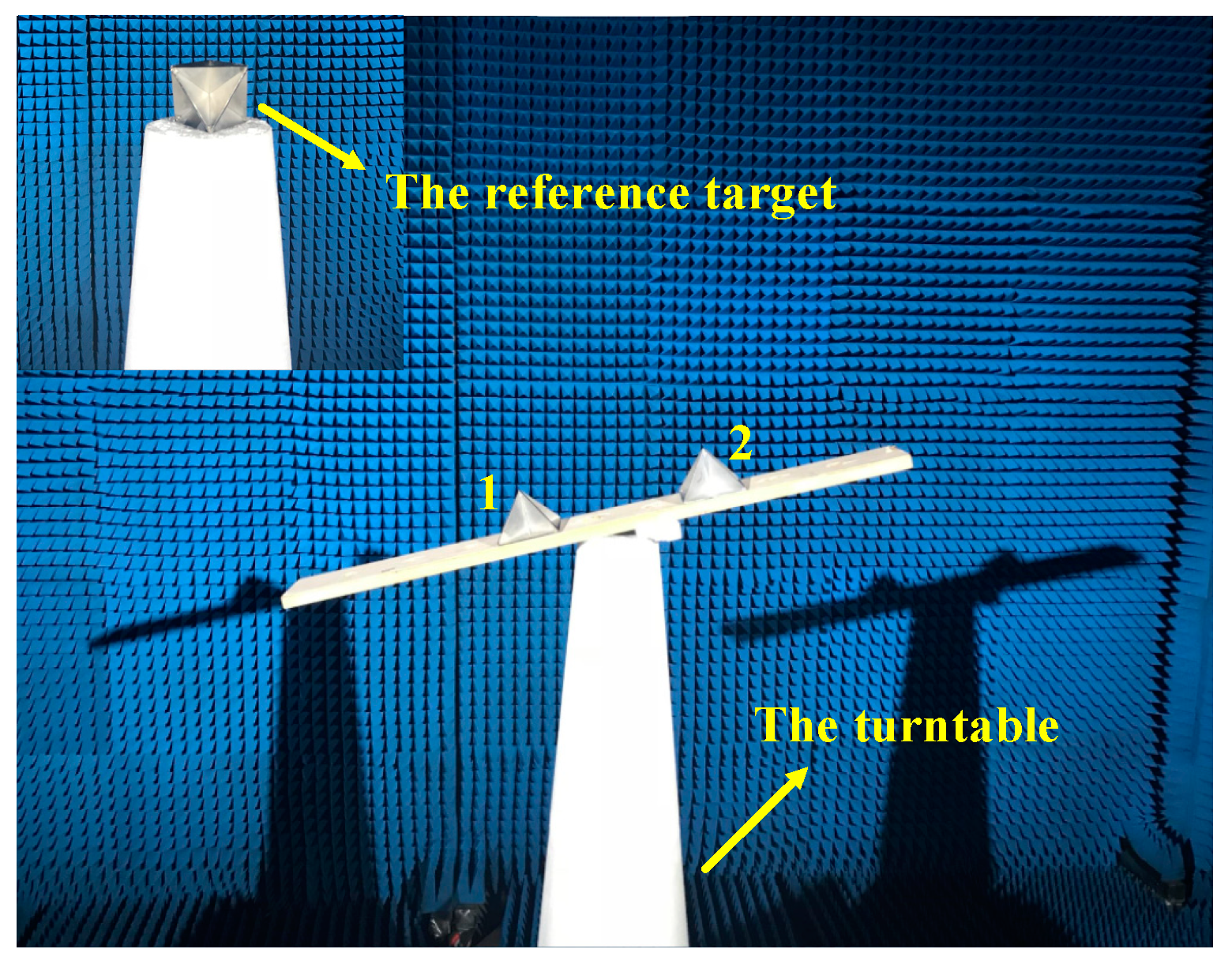
should be removed. In this paper, we use a reference signal reflected by a corner reflector located at coordinate origin o to compensate the non-ideal factors. The reference signal is expressed as:
where
is the round trip time of the reference signal. The
in the three received channels should be the same, otherwise it will bring extra inconsistent phases. This is the reason that the reference target should be located at coordinate origin. The compensated echo signal is expressed as:
From Equation (17), we can find that the phase-error function and stationary phase error are completely removed. Under the real application, the size of the target is limited which make the signals and have a strong correlation. For example, if the maximum size of a target is 100 m, we can calculate that is less than 0.33 us which can be neglected compared to the signal pulse width. Thus, the residual modulation in amplitude and phase nearly has no effect on the system performance, and the theoretical range resolution and the real position of target can be achieved.
4.2. InISAR Image Scaling
We have illustrated that the absolute value of
and
in Equations (10) and (11) should be less than
to avoid phase wrapping. However, the phase wrapping phenomenon often occurs in practical applications. For example, the baseline length, target distance, and maximum target size are 2.1 cm, 4.1 m, and 52 cm respectively in our experiment, then we can calculate that the maximum absolute value of interferometric phase is larger than
(6.14). Thus, it is necessary to perform phase unwrapping operation before InISAR imaging. In the earlier literatures, some one-dimensional (1-D) and two-dimensional (2-D) phase unwrapping methods applied to InSAR and InISAR have been proposed, such as 1-D path integral method and 2-D fast transforms and iterative methods [
34,
35,
36]. However, the inteferometric phases of the weak scatterers in ISAR images are easily contaminated by noise in these methods, and it is difficult to achieve phase unwrapping operation.
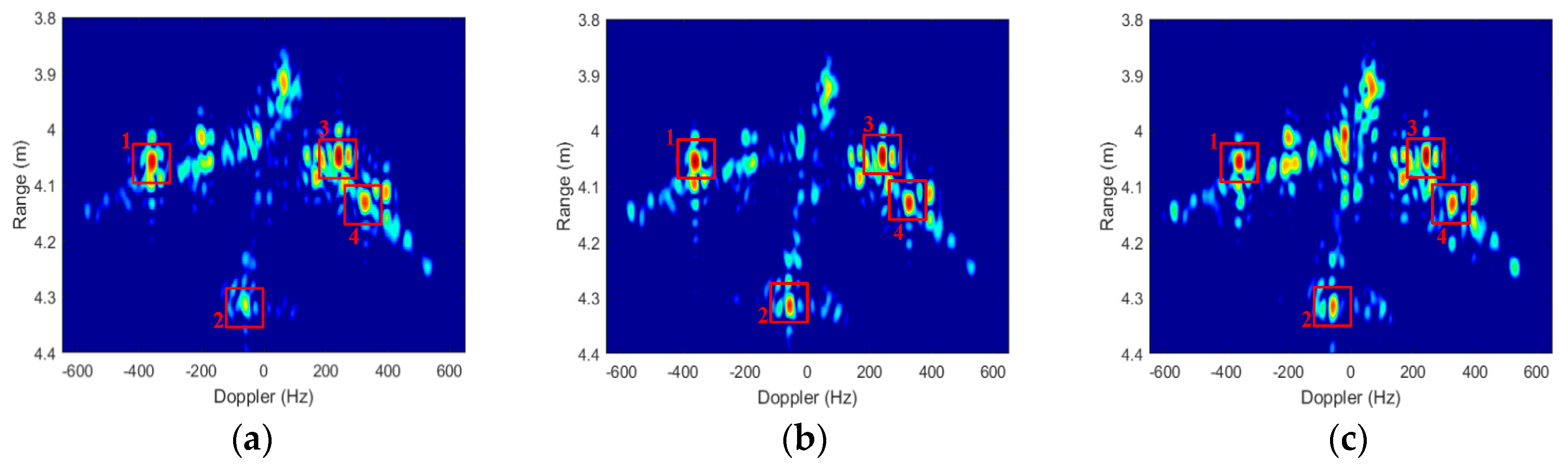
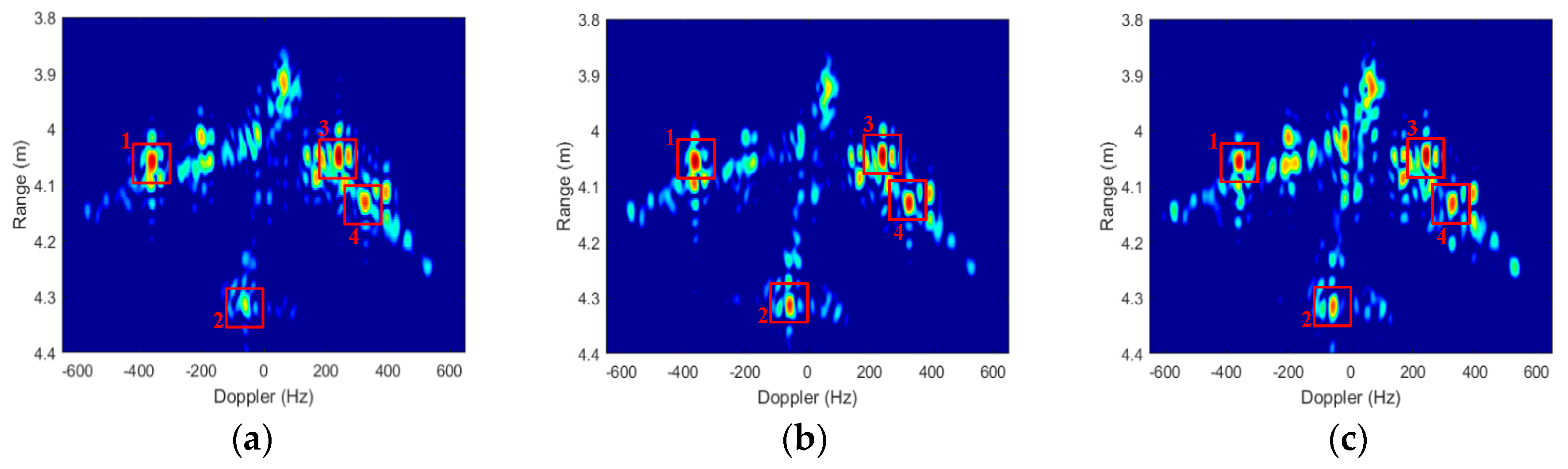
Unlike SAR image, in most cases, a high-frequency small-rotation angle ISAR image of a moving target usually consists of several dominating reflectors, such as corner reflectors formed by the tail, fuselage, and wings of an aircraft. The pixels of these dominating scatterers have stronger SNR and more accurate interferometric phase value than the weak ones. In this paper, we achieve the cross-range scaling of all scatterers based on the phases of these dominating scatterers to estimate the rotation rate of target rather than the conventional phase unwrapping operation. Once the rotational rate is obtained, the cross-range coordinates can be determined directly based on the cross-range-Doppler relationship.
The details of the proposed InISAR image scaling method are described as follows:
Step (1) Extract the dominant scatterers from
and
, and the inseparable dominant scatterers in range-Doppler domain are eliminated using [
20]:
Step (2) Extract the interferometric phases of the separable dominant scatterers, and arrange them in the order of Doppler frequency. The 1-D path integral method is applied to achieve phase unwrapping, and the theory is:
where:
and
are phases before and after phase unwrapping, respectively.
and
is the total number of the dominant scatterers.
Step (3) The cross-range coordinates of the dominant scatterers can be obtained through (11) using the .
Step (4) From (6)–(8), we can find that there is a linear relationship between Doppler frequency
and cross-range coordinate
, and it can be expressed as:
where
denotes the Doppler error. For the K dominant scatterers, the relationship between
and
is established as:
where
,
, and
. Therefore, the least mean square (LMS) can be utilized to estimate the rotational rate of target is
Step (5) Achieve cross-range image scaling based on the estimated rotational rate.
4.3. Large-Rotation Angle InISAR Imaging
The small-rotation angle (SA) ISAR images usually lose some target information due to the anisotropic scattering. To obtain high-quality InISAR images, reflected signal with a relative large range of rotation angle are needed. In large-rotation angle (LA) ISAR imaging, the RD algorithm is no longer applied, and convolutional back-projection (CBP) algorithm is adapt [
37]. The cross-range scaling can be achieved based on the estimated rotational rate, thus we just need to perform interferometric operation along height direction in LA InISAR imaging.
We have illustrated that a corner reflector located at coordinate origin is adapt as a reference target to compensate the signal frequency nonlinearity and phase inconsistency. Under the geometry in
Figure 3, the echo signal with a large angle of a complex target can be expressed as:
where
is wavenumber,
is sample angle. The imaging process is expressed as:
where:
Then the height coordinates can be directly achieved through interferometric operation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}