Localization Based on MAP and PSO for Drifting-Restricted Underwater Acoustic Sensor Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- This paper proposes a novel localization method without the presence of beacon nodes for DR-UASNs, which achieves higher localization accuracy and lower computational cost compared with the benchmark method.
- The noises varying with distances are taken into account, which is modeled by additive and multiplicative noises. Hence the noises in distance measurements can be efficiently filtered for improving localization accuracy.
- The reference selection and bound constraint mechanisms are proposed to combat the problems of localization ambiguity and low convergence speed in the PSO step.
2. Related Work
3. Network Model and Problem Definition
3.1. Network Model
3.2. Problem Definition
4. MAP-PSO Design
4.1. MAP Estimation
4.2. PSO Localization
5. Performance Evaluation
5.1. Simulation Settings
5.2. Localization Performance under Different Parameters
5.2.1. Impacts of the Penalty Factor
5.2.2. Impacts of The Maximum Iteration Number
5.2.3. Impacts of the Particle Number
5.2.4. Impacts of the Minimum Cluster Node Number
5.2.5. Localization Results
5.3. Performance Comparison with AFLA
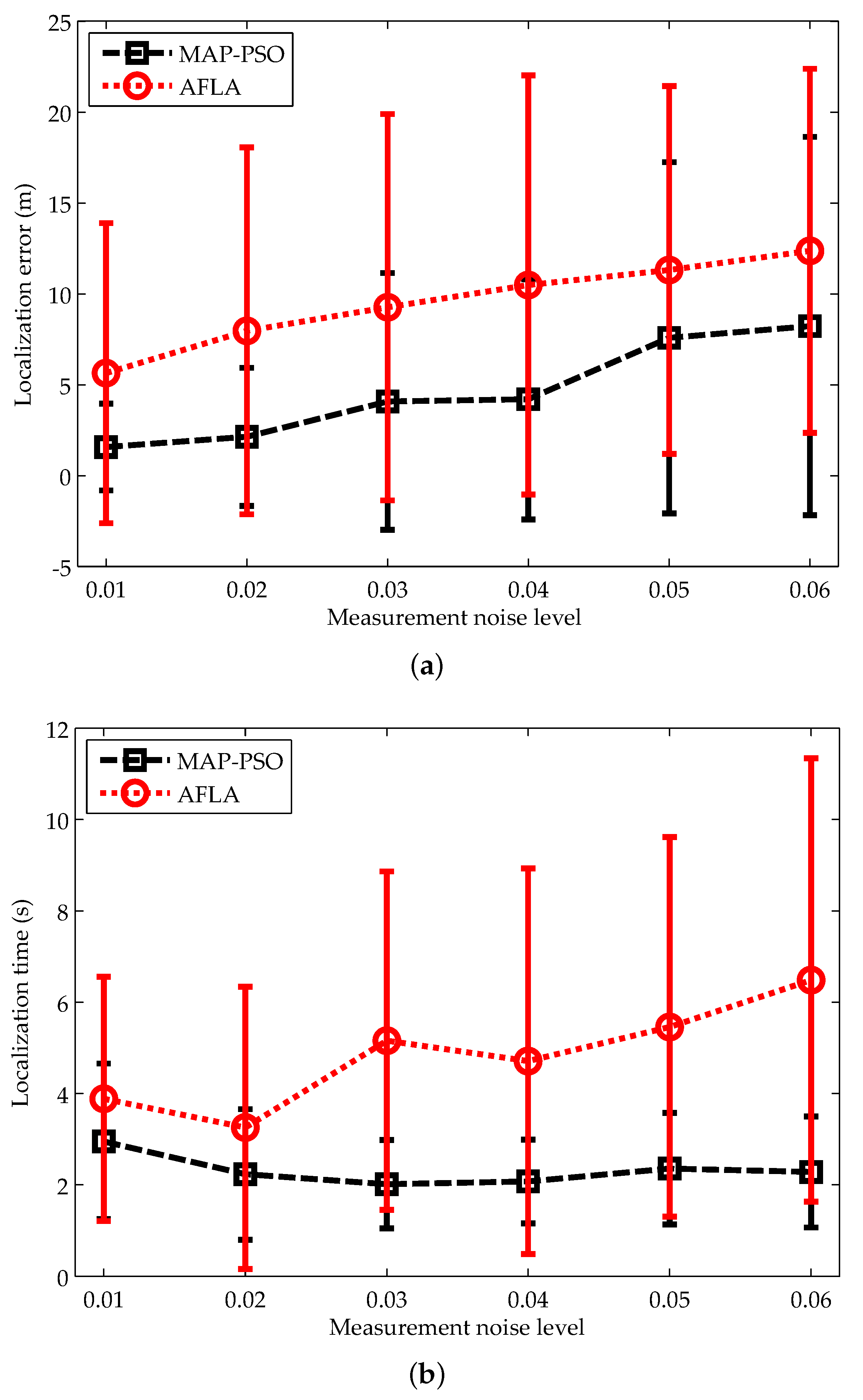
5.3.1. Impacts of the Measurement Noise Level
5.3.2. Impacts of the Node Density
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hu, K.; Guo, Z.; Ma, G.; Zhou, W.; Sun, Z. Complex Virtual Instrument Model for Ocean Sensor Networks. IEEE Access 2018, 6, 21934–21944. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Guo, Z.; Ni, L.M. Simulation and Experimentation Platforms for Underwater Acoustic Sensor Networks: Advancements and Challenges. ACM Comput. Surv. 2017, 50, 28. [Google Scholar] [CrossRef]
- Beniwal, M.; Singh, R.P.; Sangwan, A. A localization scheme for underwater sensor networks without Time Synchronization. Wirel. Pers. Commun. 2016, 88, 537–552. [Google Scholar] [CrossRef]
- Tan, H.-P.; Diamant, R.; Seah, W.K.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef] [PubMed]
- Diamant, R.; Lampe, L. Underwater localization with time-synchronization and propagation speed uncertainties. IEEE. Trans. Mob. Comput. 2013, 12, 1257–1269. [Google Scholar] [CrossRef]
- Isik, M.T.; Akan, O.B. A three dimensional localization algorithm for underwater acoustic sensor networks. IEEE Trans. Wirel. Commun. 2009, 8, 4457–4463. [Google Scholar] [CrossRef]
- Diamant, R.; Tan, H.-P.; Lampe, L. LOS and NLOS classification for underwater acoustic localization. IEEE. Trans. Mob. Comput. 2014, 13, 311–323. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Cui, J.-H.; Zhou, S.; Yang, B. A joint time synchronization and localization design for mobile underwater sensor networks. IEEE. Trans. Mob. Comput. 2016, 15, 530–543. [Google Scholar] [CrossRef]
- Ramezani, H.; Leus, G. Ranging in an underwater medium with multiple isogradient sound speed profile layers. Sensors 2012, 12, 2996–3017. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Yan, L.; Han, S.; Guan, X. A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks. Sensors 2018, 18, 8. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liang, J.; Jiang, S.; Chen, W. A Localization Method for Underwater Wireless Sensor Networks Based on Mobility Prediction and Particle Swarm Optimization Algorithms. Sensors 2016, 16, 212. [Google Scholar] [CrossRef] [PubMed]
- Das, A.P.; Thampi, S.M. Fault-resilient localization for underwater sensor networks. Ad Hoc Netw. 2017, 55, 132–142. [Google Scholar] [CrossRef]
- Gao, J.; Shen, X.; Zhao, R.; Mei, H.; Wang, H. A Double Rate Localization Algorithm with One Anchor for Multi-Hop Underwater Acoustic Networks. Sensors 2017, 5, 984. [Google Scholar] [CrossRef] [PubMed]
- Han, G.; Zhang, C.; Liu, T.; Shu, L. MANCL: A multi-anchor nodes collaborative localization algorithm for underwater acoustic sensor networks. Wirel. Commun. Mob. Comput. 2016, 16, 682–702. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, H.; Wang, W.; Chang, S.; Chen, J. Color filtering localization for three-dimensional underwater acoustic sensor networks. Sensors 2015, 15, 6009–6032. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Wu, J.; Zhu, Z. Multihops fitting approach for node localization in underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 682182. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, Q.; Liu, M.; Fan, Z. A top-down positioning scheme for underwater wireless sensor networks. Sci. China-Inf. Sci. 2014, 57, 1–10. [Google Scholar] [CrossRef]
- Kim, S.; Yoo, Y. SLSMP: Time synchronization and localization using seawater movement pattern in underwater wireless networks. Int. J. Distrib. Sens. Netw. 2014, 2014, 172043. [Google Scholar] [CrossRef]
- Moradi, M.; Rezazadeh, J.; Ismail, A.S. A reverse localization scheme for underwater acoustic sensor networks. Sensors 2012, 12, 4352–4380. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Y. Localization for anchor-free underwater sensor networks. Comput. Electr. Eng. 2013, 39, 1812–1821. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Gong, Y.; Ni, L. Localization for Drifting Restricted Floating Ocean Sensor Networks. IEEE Trans. Veh. Technol. 2016, 65, 9968–9981. [Google Scholar] [CrossRef]
- Luo, H.; Zhao, Y.; Guo, Z.; Liu, S.; Chen, P.; Ni, L.M. UDB: Using directional beacons for localization in underwater sensor networks. In Proceedings of the 14th IEEE International Conference on Parallel and Distributed Systems (ICPADS’08), Melbourne, VIC, Australia, 8–10 December 2008; pp. 551–558. [Google Scholar]
- Erol, M.; Vieira, L.F.M.; Gerla, M. Localization with Dive’N’Rise (DNR) beacons for underwater acoustic sensor networks. In Proceedings of the 2007 International Conference on Mobile Computing and Networking (MobiCom’07)-Second Workshop on Underwater Networks (WUWNet’07), Montreal, QC, Canada, 14–17 September 2007; pp. 97–100. [Google Scholar]
- Luo, J.; Fan, L. A Two-Phase Time Synchronization-Free Localization Algorithm for Underwater Sensor Networks. Sensors 2017, 17, 726. [Google Scholar] [CrossRef] [PubMed]
- Erol, M.; Vieira, L.F.M.; Caruso, A.; Paparella, F.; Gerla, M.; Oktug, S. Multi stage underwater sensor localization using mobile beacons. In Proceedings of the 2nd International Conference on Sensor Technologies and Applications (SENSORCOMM 2008), Cap Esterel, France, 25–31 August 2008; pp. 710–714. [Google Scholar]
- Luo, J.; Fan, L.; Wu, S.; Yan, X. Research on localization algorithms based on acoustic communication for underwater sensor networks. Sensors 2018, 18, 67. [Google Scholar] [CrossRef] [PubMed]
- Mortazavi, E.; Javidan, R.; Dehghani, M.J.; Kavoosi, V. A robust method for underwater wireless sensor joint localization and synchronization. Ocean Eng. 2017, 137, 276–286. [Google Scholar] [CrossRef]
- Kim, Y.; Noh, Y.; Kim, K. RAR: Real-time acoustic ranging in underwater sensor networks. IEEE Commun. Lett. 2017, 21, 2328–2331. [Google Scholar] [CrossRef]
- Bian, T.; Venkatesan, R.; Li, C. Design and evaluation of a new localization scheme for underwater acoustic sensor networks. In Proceedings of the 2009 IEEE Global Telecommunications Conference (GLOBECOM), Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–5. [Google Scholar]
- Zhou, Z.; Peng, Z.; Cui, J.-H.; Shi, Z.; Bagtzoglou, A.C. Scalable localization with mobility prediction for underwater sensor networks. IEEE. Trans. Mob. Comput. 2011, 10, 335–348. [Google Scholar] [CrossRef]
- Hu, K.; Sun, Z.; Luo, H.; Zhou, W.; Guo, Z. STVF: Spatial-temporal variational filtering for localization in underwater acoustic sensor networks. Sensors 2018, 18, 2078. [Google Scholar] [CrossRef]
- Li, M.; Yang, Z.; Liu, Y. Sea depth measurement with restricted floating sensors. ACM Trans. Embed. Comput. Syst. 2013, 13, 1. [Google Scholar] [CrossRef]
- Ji, C.; Yuan, Z. Experimental study of a hybrid mooring system. J. Mar. Sci. Technol. 2015, 20, 213–225. [Google Scholar] [CrossRef]
- Ghafari, H.; Dardel, M. Parametric study of catenary mooring system on the dynamic response of the semi-submersible platform. Ocean Eng. 2018, 153, 319–332. [Google Scholar] [CrossRef]
- Hong, L.; Hong, F.; Guo, Z.; Li, Z. ECS: Efficient Communication Scheduling for Underwater Sensor Networks. Sensors 2011, 11, 2920–2938. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Peng, Z.; Cui, J.-H.; Chen, H. Toward practical MAC design for underwater acoustic networks. IEEE. Trans. Mob. Comput. 2015, 14, 872–886. [Google Scholar] [CrossRef]
- Wang, X.; Fu, M.; Zhang, H. Target tracking in wireless sensor networks based on the combination of KF and MLE using distance measurements. IEEE. Trans. Mob. Comput. 2012, 11, 567–576. [Google Scholar] [CrossRef]
- Cui, H.; Shu, M.; Song, M.; Wang, Y. Parameter Selection and Performance Comparison of Particle Swarm Optimization in Sensor Networks Localization. Sensors 2017, 17, 487. [Google Scholar] [CrossRef] [PubMed]
- Yildiz, H.U.; Gungor, V.C.; Tavli, B. Packet Size Optimization for Lifetime Maximization in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Inform. 2018, in press. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, K.; Song, X.; Sun, Z.; Luo, H.; Guo, Z. Localization Based on MAP and PSO for Drifting-Restricted Underwater Acoustic Sensor Networks. Sensors 2019, 19, 71. https://doi.org/10.3390/s19010071
Hu K, Song X, Sun Z, Luo H, Guo Z. Localization Based on MAP and PSO for Drifting-Restricted Underwater Acoustic Sensor Networks. Sensors. 2019; 19(1):71. https://doi.org/10.3390/s19010071
Chicago/Turabian StyleHu, Keyong, Xianglin Song, Zhongwei Sun, Hanjiang Luo, and Zhongwen Guo. 2019. "Localization Based on MAP and PSO for Drifting-Restricted Underwater Acoustic Sensor Networks" Sensors 19, no. 1: 71. https://doi.org/10.3390/s19010071
APA StyleHu, K., Song, X., Sun, Z., Luo, H., & Guo, Z. (2019). Localization Based on MAP and PSO for Drifting-Restricted Underwater Acoustic Sensor Networks. Sensors, 19(1), 71. https://doi.org/10.3390/s19010071