Dynamic Barrier Coverage in a Wireless Sensor Network for Smart Grids


Abstract
1. Introduction
- A method of monitoring network coverage for transmission line or other linear applications is proposed.
- Modeling the deployed nodes with a network coverage graph.
- Mathematical modeling of dynamic barrier coverage and definition of constraints to meet network requirements are given.
- A distributed algorithm based on potential game is designed for the problem.
2. Related Work
3. Models and Definitions
3.1. Related Problem Formulation
3.2. Formal Definition for Dynamic Barrier Coverage Problem
4. The Proposed Method
4.1. Rational Game Theory
4.2. Dynamic Barrier Coverage Game Model (DBCGM)
4.3. Distributed Learning Algorithm
- (1)
- All nodes in the network have unique IDs, which increase from one end of a DBP to the other according to the distribution of DBPs.
- (2)
- The connectivity of the whole DBP can be judged in a distributed way.
- (3)
- Each sensor can obtain the IDs of one hop neighbor node, the remaining energy and the number of other nodes within the communication range of it and other information.
4.3.1. Neighbor Discovery Phase
| Algorithm 1. DCGA for every node in the network in neighbor discovery phase |
| 1: node start (initialization) |
| 2: if t = 0 then |
| 3: broadcast ID |
| 4: listen for neighbors’ IDs |
| 5: wait for messages () |
| 6: if message receives in queue then |
| 7: update number of neighbors |
| 8: update location of neighbors |
| 9: update initial energy of neighbors |
| 10: update residual energy of neighbors |
| 11: end if |
| 12: end if |
| 13: if t = 1 then |
| 14: Turn off the broadcast and listen |
| 15: generates its own set of pending strategies Si = (si, sj1, sj2, …, sjk) |
| 16: end if |
4.3.2. Game Execution Phase
- (1)
- Sensor vi determines whether to enter the exploration or exploitation stage by the exploration rate ε(t) = .
- (2)
- With a probability of P = ε(t), the sensor vi enters the exploration stage and tests random actions. Then, there are two situations:
- Case 1: si (t − 1) = 0 → si (t) = 1
- Case 2: si (t − 1) = 1 → si (t) = 0
- (3)
- With a probability of P = 1 − ε(t), the sensor vi enters the exploitation stage and sets its action to = si (tx).
- (4)
- When is determined, the strategy action will determine whether sensor vi is performing deployment or being removed. If = 1, the sensor will be deployed in DBP. Otherwise, it will be removed from it.
| Algorithm 2. DCGA for every node in the network in game execution phase. |
| 1: if t > 2 then |
| 2: Setting and Calculating ε(t) = |
| 3: if P = ε(t) then |
| 4: switch (si (t − 1)) |
| 5: Case 1: 0 → si (t) = 1 |
| 6: break |
| 7: Case 2: 1 → si (t) = 0 |
| 8: break |
| 9: end if |
| 10: if P = 1 − ε(t) then |
| 11: Calculating si (tx) |
| 12: ← si (tx) |
| 13: end if |
| 14: return |
| 15: end if |
4.3.3. Network Maintenance Phase
5. Performance Evaluation
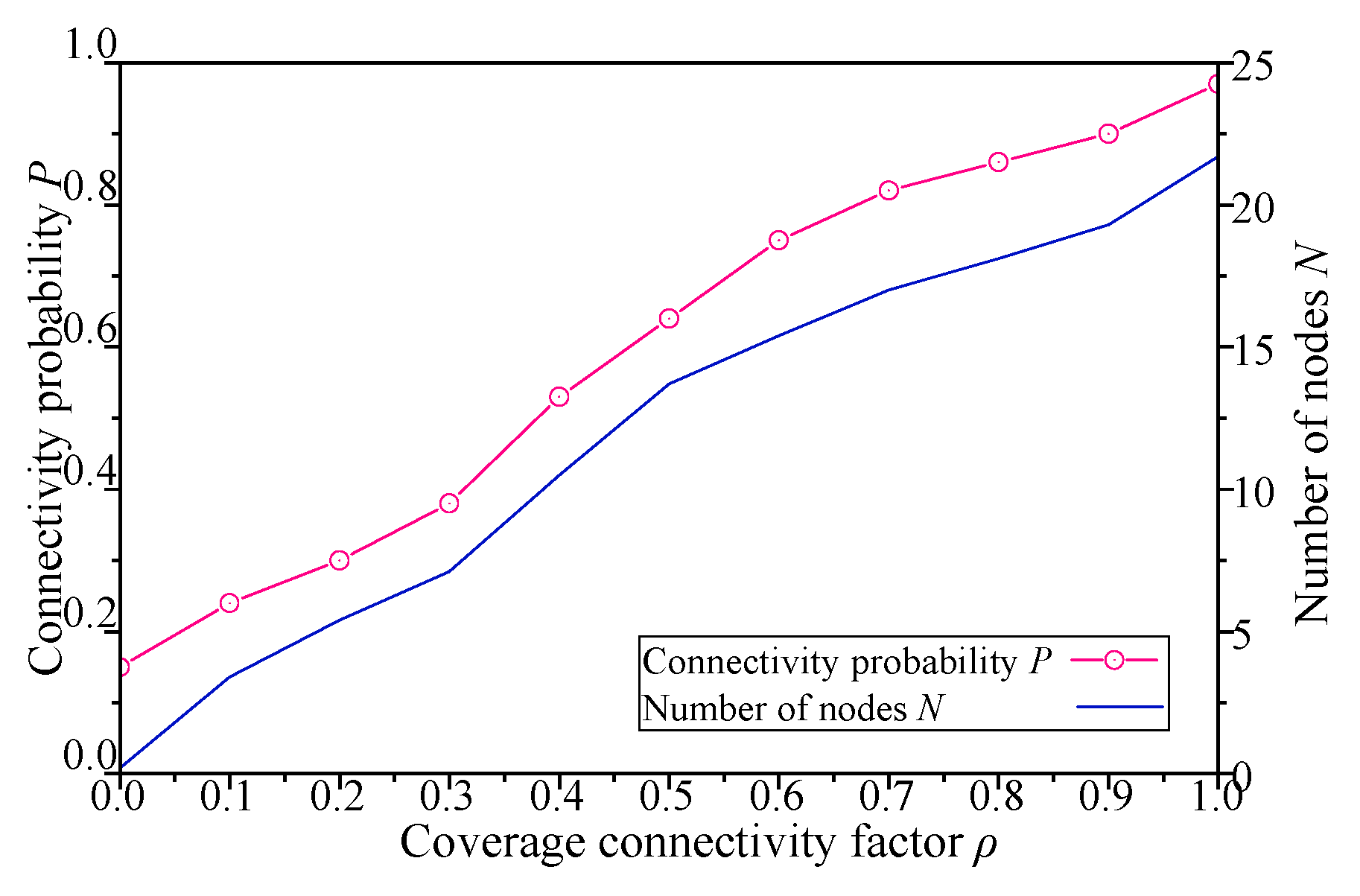
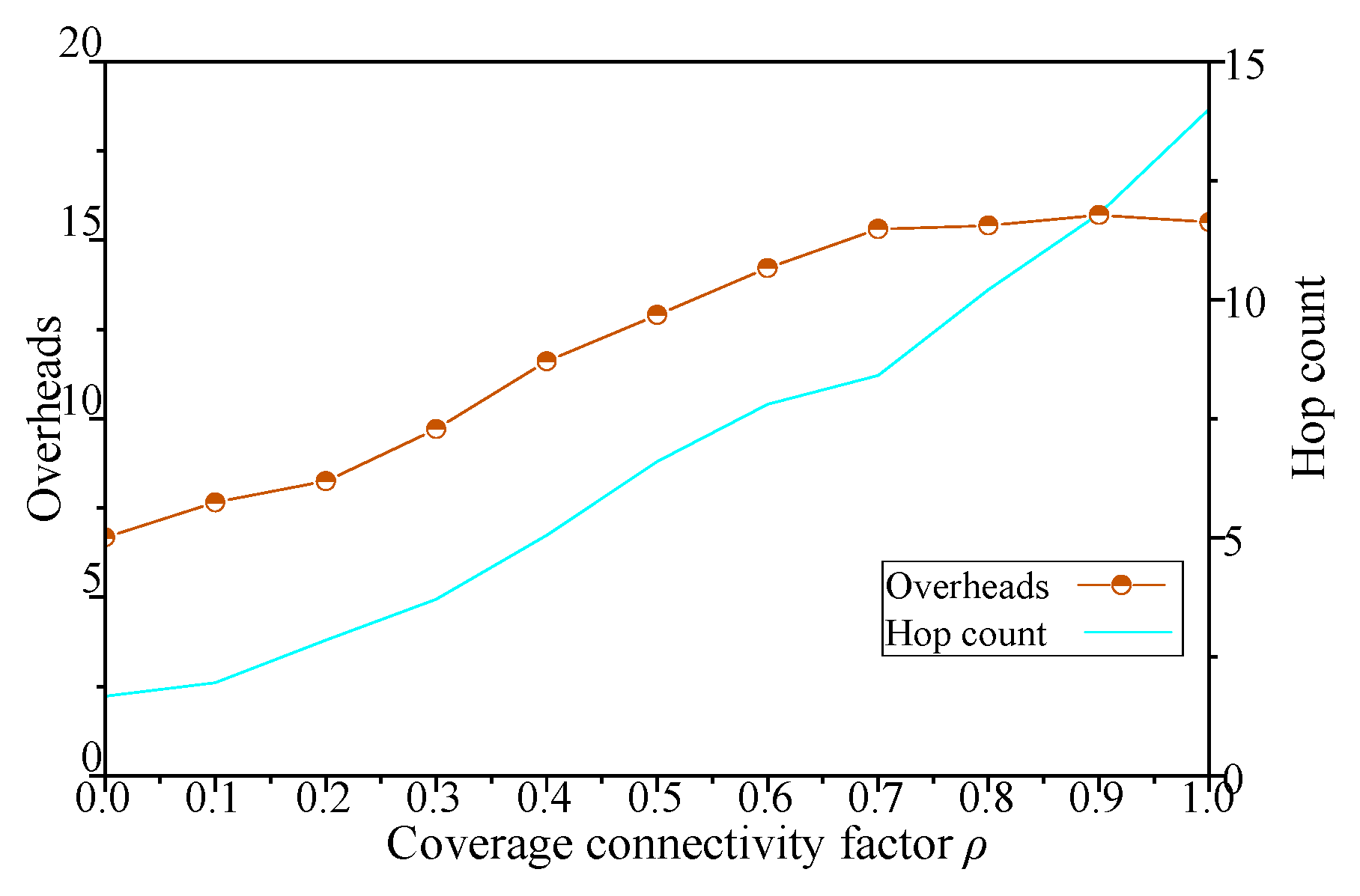
5.1. Performance of DCGA with Different Parameters of ρ
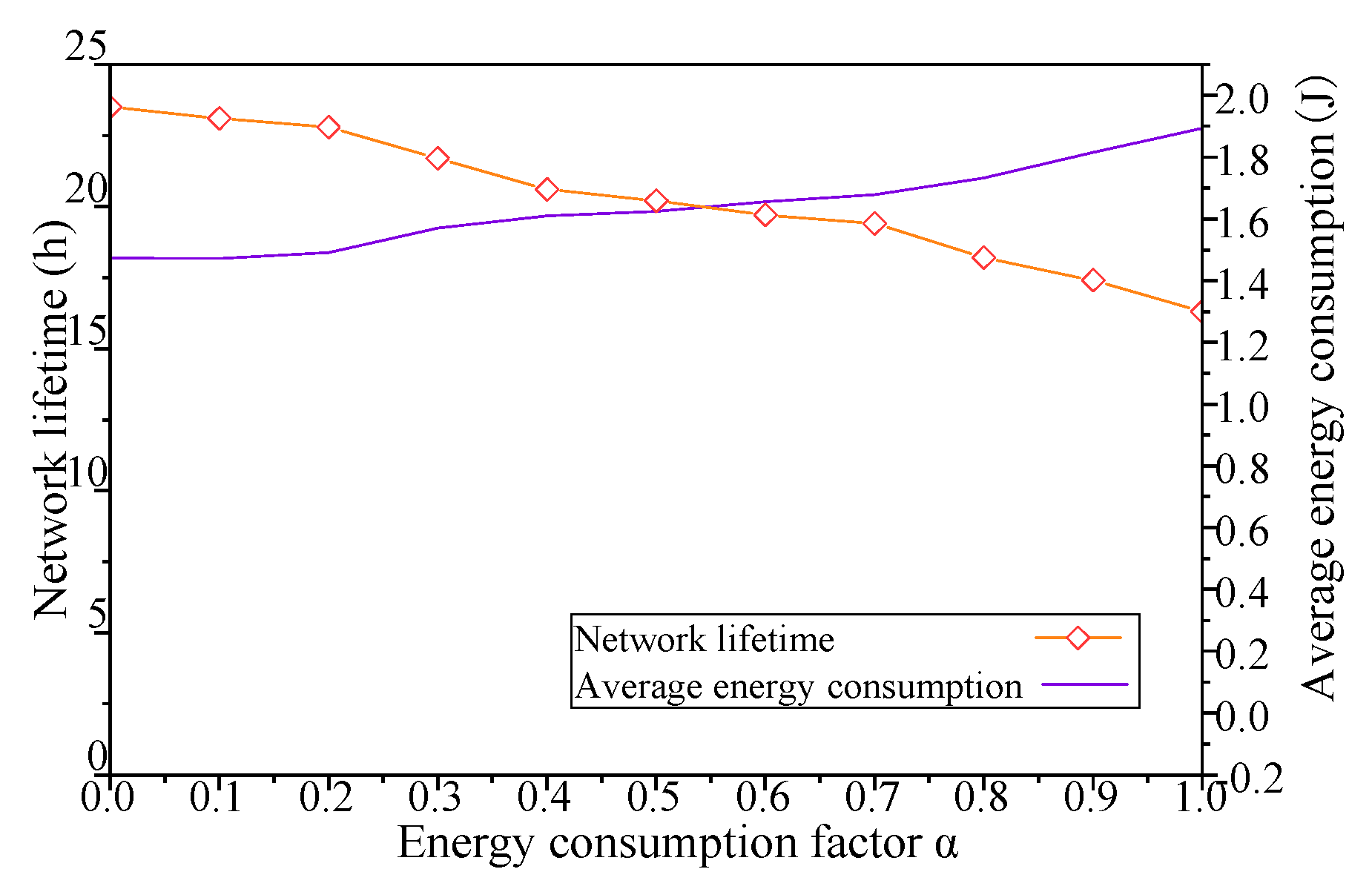
5.2. Performance of DCGA with Different Parameters of α
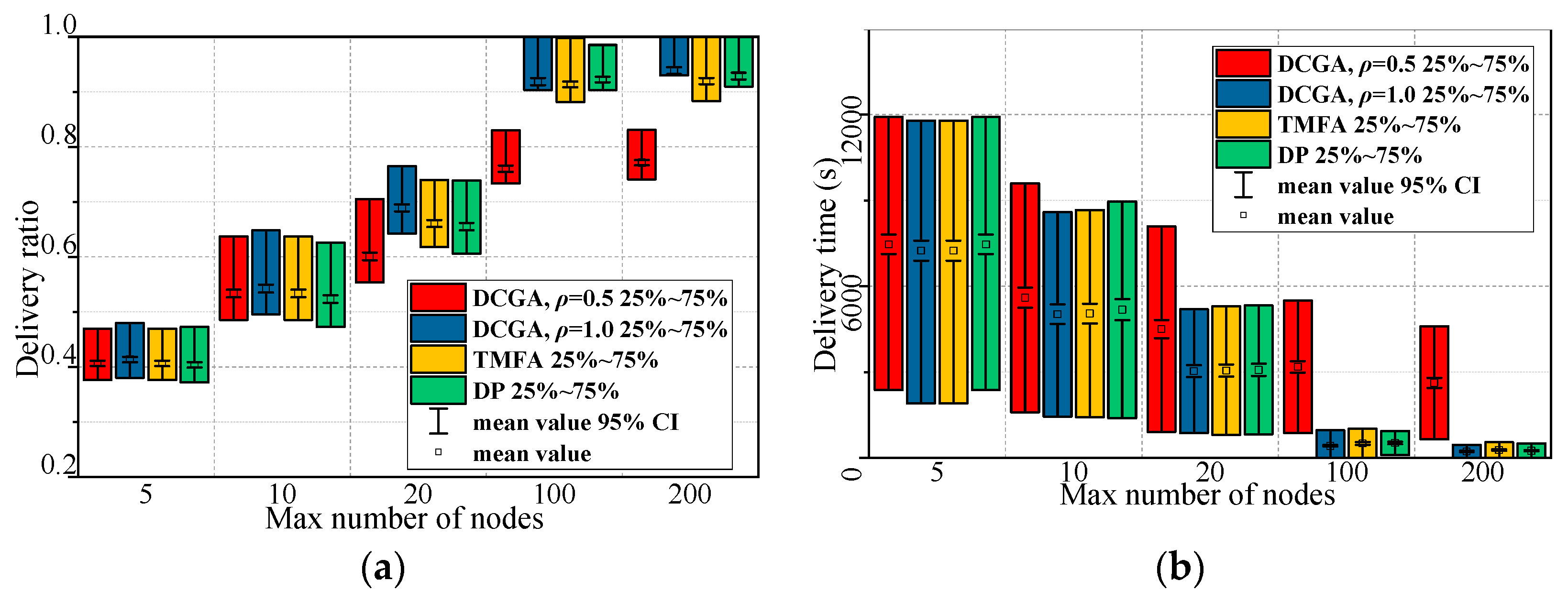
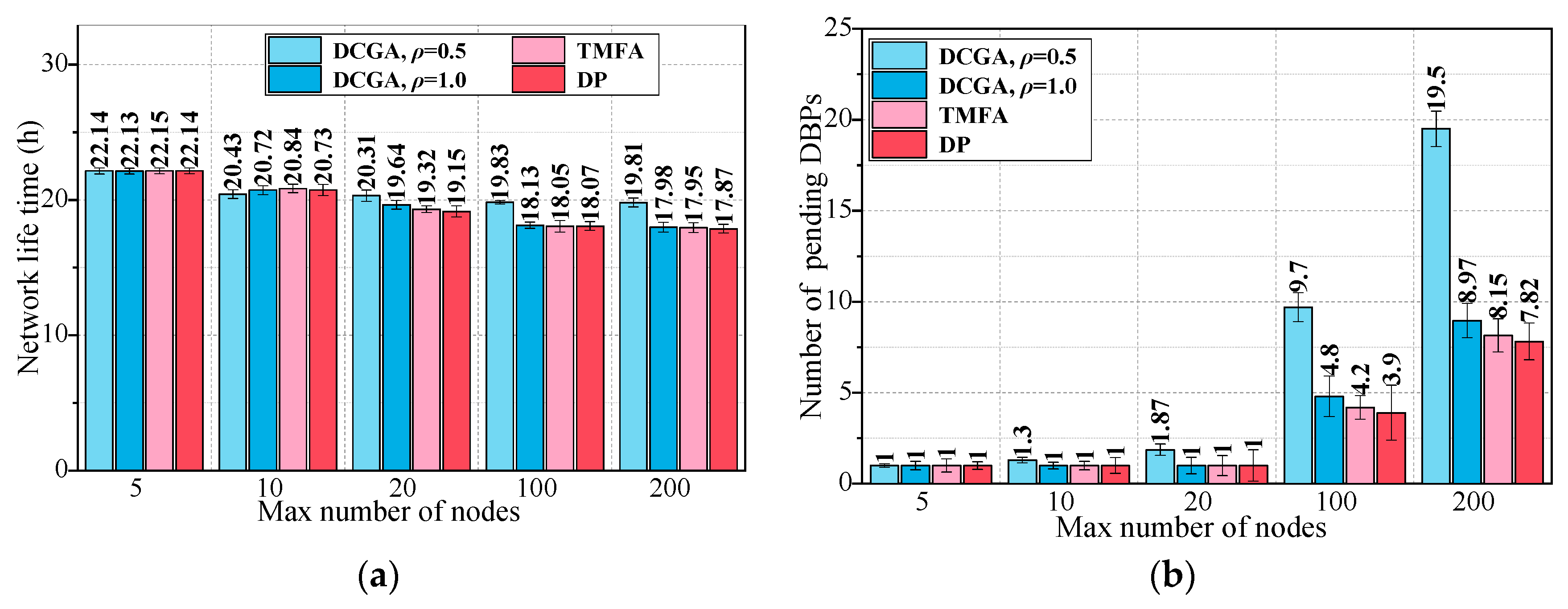
5.3. Performance of DCGA Compared with other Algorithms
5.4. Analysis of Simulation Results
5.4.1. Analysis of the Results of DCGA with Different Parameters
5.4.2. Analysis of the Results of Algorithms with the Different Parameters
6. Conclusions
- (1)
- Network dynamic barrier coverage (DBC), as a new method to study linear dynamic delay tolerance, achieves network performance optimization. By adjusting the deployment density of static nodes and reasonably controlling the number of nodes according to the dynamic barrier path (DBP), the network delay and connectivity are greatly improved. By extending the traditional barrier coverage theory and applying the wireless sensor network to transmission line, the dynamic barrier coverage problem can well describe the dynamic sensing coverage characteristics and requirements of linear areas such as transmission lines, rivers and highways.
- (2)
- The proposed method mainly includes two parts: dynamic barrier coverage (DBC) model and distributed coverage game algorithm (DCGA). The first part introduces the basic concepts of dynamic barrier coverage problem, and introduces the analysis method of network coverage graph and theoretical model dynamic barrier path. Then, based on the principle of economical deployment of network nodes in transmission line monitoring system, the method of adjusting network connectivity and real-time by calculating connectivity probability in dynamic barrier path is proposed. In the second part, a new network coverage method based on potential game is proposed. The game method fully considers the characteristics of transmission lines and robots, and designs a utility function based on network connectivity probability and network energy consumption. Moreover, a new network coverage algorithm DCGA is designed. This algorithm uses a distributed learning method to calculate and update the utilities of each node, and then the node performs deployment actions according to the utilities combined with the requirements of the application scenario.
- (3)
- In the simulation, three scenarios are implemented, and eight related network performance parameters are collected and analyzed. The results show that DCGA can adjust many network performances of dynamic monitoring sensor network for transmission line. Then, the financial cost of network construction is also considered. DCGA can adjust the network connectivity (node deployment density) and network delay by preset coverage connectivity factors according to the requirements of application scenarios, thus balancing the network performance and the cost of the monitoring system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fan, F.; Wu, G.; Wang, M.; Cao, Q.; Yang, S. Multi-Robot Cyber Physical System for Sensing Environmental Variables of Transmission Line. Sensors 2018, 18, 3146. [Google Scholar] [CrossRef] [PubMed]
- Fan, F.; Wu, G.; Wang, M.; Cao, Q.; Yang, S. Robot Delay-Tolerant Sensor Network for Overhead Transmission Line Monitoring. Appl. Sci. 2018, 8, 847. [Google Scholar] [CrossRef]
- Gage, D.W. Command control for many-robot systems. In Proceedings of the Autonomous Undervater Vehicles-92, Huntsville, AL, USA, 22–24 June 1992; pp. 22–24. [Google Scholar]
- Han, R.; Yang, W.; Zhang, L. Achieving Crossed Strong Barrier Coverage in Wireless Sensor Network. Sensors 2018, 18, 534. [Google Scholar] [CrossRef] [PubMed]
- Mostafaei, H.; Chowdhurry, M.U.; Obaidat, M.S. Border Surveillance with WSN Systems in a Distributed Manner. IEEE Syst. J. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Cheng, C.F.; Wang, C.W. The Target-Barrier Coverage Problem in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2017, 17, 1216–1232. [Google Scholar] [CrossRef]
- Saipulla, A.; Liu, B.; Xing, G.; Fu, X.; Wang, J. Barrier coverage with sensors of limited mobility. In Proceedings of the ACM Interational Symposium on Mobile Ad Hoc Networking and Computing, MobiHoc, Chicago, IL, USA, 20–24 September 2010; pp. 201–210. [Google Scholar]
- Wang, Z.; Liao, J.; Cao, Q.; Qi, H.; Wang, Z. Achieving k-barrier coverage in hybrid directional sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 1443–1455. [Google Scholar] [CrossRef]
- Kong, L.; Lin, S.; Xie, W.; Qiao, X.; Jin, X.; Zeng, P.; Ren, W.; Liu, X.Y. Adaptive barrier coverage using software defined sensor networks. IEEE Sens. J. 2016, 16, 7364–7372. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, Q.; Qi, H.; Chen, H.; Wang, Q. Cost-effective barrier coverage formation in heterogeneous wireless sensor networks. Ad Hoc Netw. 2017, 64, 65–79. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, H.; Cao, Q.; Qi, H.; Wang, Z.; Wang, Q. Achieving location error tolerant barrier coverage for wireless sensor networks. Comput. Netw. 2017, 112, 314–328. [Google Scholar] [CrossRef]
- Du, J.; Wang, K.; Liu, H.; Guo, D. Maximizing the lifetime of k-discrete barrier coverage using mobile sensors. IEEE Sens. J. 2013, 13, 4690–4701. [Google Scholar] [CrossRef]
- Balister, P.; Bollobas, B.; Sarkar, A.; Kumar, S. Reliable density estimates for coverage and connectivity in thin strips of finite length. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montréal, QC, Canada, 9–14 September 2007; pp. 75–86. [Google Scholar]
- Kumar, S.; Lai, T.H.; Posner, M.E.; Sinha, P. Optimal sleep-wakeup algorithms for barriers of wireless sensors. In Proceedings of the 4th International Conference on Broadband Communications, Networks and Systems, Raleigh, NC, USA, 10–14 September 2007; pp. 327–336. [Google Scholar]
- Chen, A.; Lai, T.H.; Xuan, D. Measuring and guaranteeing quality of barrier-coverage in wireless sensor networks. In Proceedings of the 9th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hong Kong, China, 26–30 May 2008; pp. 421–430. [Google Scholar]
- Chen, A.; Kumar, S.; Lai, T.H. Designing localized algorithms for barrier coverage. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montréal, QC, Canada, 9–14 September 2007; pp. 63–74. [Google Scholar]
- Liu, B.; Dousse, O.; Wang, J.; Saipulla, A. Strong barrier coverage of wireless sensor networks. In Proceedings of the 9th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hong Kong, China, 26–30 May 2008; pp. 411–420. [Google Scholar]
- Li, L.; Zhang, B.; Shen, X.; Zheng, J.; Yao, Z. A study on the weak barrier coverage problem in wireless sensor networks. Comput. Netw. 2011, 55, 711–721. [Google Scholar] [CrossRef]
- Meguerdichian, S.; Koushanfar, F.; Qu, G.; Potkonjak, M. Exposure in wireless ad-hoc sensor networks. In Proceedings of the 7th Annual International Conference on Mobile Computing and Networking, Rome, Italy, 16–21 July 2001; pp. 139–150. [Google Scholar]
- Wu, Y.; Yin, J.; Li, M.; En, Z.; Xie, Z. Efficient algorithms for probabilistic k-coverage in directional sensor networks. In Proceedings of the 2008 International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP 2008), Sydney, NSW, Australia, 15–18 December 2008; pp. 587–592. [Google Scholar]
- Yang, G.; Qiao, D. Barrier information coverage with wireless sensors. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 918–926. [Google Scholar]
- He, S.; Gong, X.; Zhang, J.; Chen, J.; Sun, Y. Curve-based deployment for barrier coverage in wireless sensor networks. IEEE Trans. Wirel. Commun. 2014, 13, 724–735. [Google Scholar] [CrossRef]
- Saipulla, A.; Westphal, C.; Benyuan, L.; Jie, W. Barrier coverage of line-based deployed wireless sensor networks. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 127–135. [Google Scholar]
- He, S.; Chen, J.; Li, X.; Shen, X.; Sun, Y. Cost-effective barrier coverage by mobile sensor networks. In Proceedings of the IEEE INFOCOM 2012, Orlando, FL, USA, 25–30 March 2012; pp. 819–827. [Google Scholar]
- Wang, Y.; Cao, G. Barrier coverage in camera sensor networks. In Proceedings of the Twelfth ACM International Symposium on Mobile Ad Hoc Networking and Computing, Paris, France, 17–19 May 2011; pp. 1–10. [Google Scholar]
- Mostafaei, H.; Shojafar, M.; Zaher, B.; Singhal, M. Barrier coverage of wsns with the imperialist competitive algorithm. J. Supercomput. 2017, 12, 1–24. [Google Scholar] [CrossRef]
- Santoso, F. Sub-optimal decentralised control algorithms for blanket and k-barrier coverage in autonomous robotic wireless sensor networks. IET Commun. 2010, 4, 2041–2057. [Google Scholar] [CrossRef]
- Kumar, S.; Lai, T.H.; Posner, M.E.; Sinha, P. Maximizing the lifetime of a barrier of wireless sensors. IEEE Trans. Mob. Comput. 2010, 9, 1161–1172. [Google Scholar] [CrossRef]
- Han, R.; Zhang, L.; Wei, Y. Maximizing strong barriers in lifetime-heterogeneous directional sensor network. In Proceedings of the 13th International Symposium on Wireless Communication Systems (ISWCS 2016), Poznan, Poland, 20–23 September 2016; pp. 80–85. [Google Scholar]
- Lu, Z.; Li, W.W.; Pan, M. Maximum lifetime scheduling for target coverage and data collection in wireless sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 714–727. [Google Scholar] [CrossRef]
- Jing, A.; Abouzeid, A.A. Coverage by directional sensors in randomly deployed wireless sensor networks. J. Comb. Optim. 2006, 11, 21–41. [Google Scholar]
- Yen, L.H.; Lin, C.M.; Leung, V.C.M. Distributed lifetime-maximized target coverage game. ACM Trans. Sens. Netw. 2013, 9, 1–23. [Google Scholar] [CrossRef]
- Abolhasan, M.; Maali, Y.; Rafiei, A.; Ni, W. Distributed hybrid coverage hole recovery in wireless sensor networks. IEEE Sens. J. 2016, 16, 8640–8648. [Google Scholar] [CrossRef]
- Li, X.L.; Feng, D.L.; Peng, P.C. A potential game based topology control algorithm for wireless sensor networks. Acta Phys. Sin. 2016, 65, 028401. [Google Scholar]
- Danczyk, A.; Liu, H.X. A mixed-integer linear program for optimizing sensor locations along freeway corridors. Transp. Res. Part B Methodol. 2011, 45, 208–217. [Google Scholar] [CrossRef]
- Shi, Q.; He, C.; Chen, H.; Jiang, L. Distributed wireless sensor network localization via sequential greedy optimization algorithm. IEEE Trans. Signal Process. 2010, 58, 3328–3340. [Google Scholar] [CrossRef]
- Mostafaei, H.; Meybodi, M.R. An Energy Efficient Barrier Coverage Algorithm for Wireless Sensor Networks. Wirel. Pers. Commun. 2014, 77, 2099–2115. [Google Scholar] [CrossRef]
- Fudenberg, D.; Tirole, J. Game Theory, 1st ed.; Mit Press Books: Cambridge, UK, 1991; pp. 841–846. [Google Scholar]
- Monderer, D.; Shapley, L.S. Potential Games. Games Econ. Behav. 1996, 14, 124–143. [Google Scholar] [CrossRef]
- Keränen, A.; Ott, J.; Kärkkäinen, T. The ONE Simulator for DTN Protocol Evaluation. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques (ICST), Rome, Italy, 2–6 March 2009. [Google Scholar]
- Graf, F.; Kriegel, H.P.; Renz, M. MARiO: Multi-Attribute Routing in Open Street Map. In Advances in Spatial and Temporal Databases, Proceedings of the International Symposium on Spatal and Temporal Databases, Minneapolis, MN, USA, 24–26 August 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 486–490. [Google Scholar]
- Zhang, L.; Tang, J.; Zhang, W. Strong barrier coverage with directional sensors. In Proceedings of the Global Telecommunications Conference (GLOBECOM 2009), Honolulu, HI, USA, 30 November 2009; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Default Value |
|---|---|
| Network area size (m × m) | 74,500 × 143,400 |
| Simulation run time (s) | 86,400 |
| Number of Robots | 5 nodes |
| Max number of SNs | 100 nodes |
| Number of WCNs | 5 nodes |
| Rc of WCNs, SNs and robot (m) | 3000 |
| Movement rate of Robot (m/s) | 3–5 |
| Tpause (s) | 10–30 |
| Buffer size (M) | 500 |
| Message size (Kb) | 2000 |
| Robot message interval (s) | 60, 120 |
| Source nodes | Robot |
| Destination nodes | WCNs |
| Movement model | BPRW |
| Alpha and Beta of DTMA | 0.78, 0.22 |
| ρ of DCGA | 0.8 |
| α of DCGA | 0.7 |
| Parameter | Parameter Variation Range | Parameter Variation Amplitude |
|---|---|---|
| ρ | 0–1 | 0.1 |
| Parameter | Parameter Variation Range | Parameter Variation Amplitude |
|---|---|---|
| α | 0–1 | 0.1 |
| Parameter | Number 1 | Number 2 | Number 3 | Number 4 | Number 5 |
|---|---|---|---|---|---|
| Maximum number of nodes | 5 | 10 | 20 | 100 | 200 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, F.; Ji, Q.; Wu, G.; Wang, M.; Ye, X.; Mei, Q. Dynamic Barrier Coverage in a Wireless Sensor Network for Smart Grids. Sensors 2019, 19, 41. https://doi.org/10.3390/s19010041
Fan F, Ji Q, Wu G, Wang M, Ye X, Mei Q. Dynamic Barrier Coverage in a Wireless Sensor Network for Smart Grids. Sensors. 2019; 19(1):41. https://doi.org/10.3390/s19010041
Chicago/Turabian StyleFan, Fei, Qiaoling Ji, Gongping Wu, Man Wang, Xuhui Ye, and Quanjie Mei. 2019. "Dynamic Barrier Coverage in a Wireless Sensor Network for Smart Grids" Sensors 19, no. 1: 41. https://doi.org/10.3390/s19010041
APA StyleFan, F., Ji, Q., Wu, G., Wang, M., Ye, X., & Mei, Q. (2019). Dynamic Barrier Coverage in a Wireless Sensor Network for Smart Grids. Sensors, 19(1), 41. https://doi.org/10.3390/s19010041