A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN


Abstract
:1. Introduction
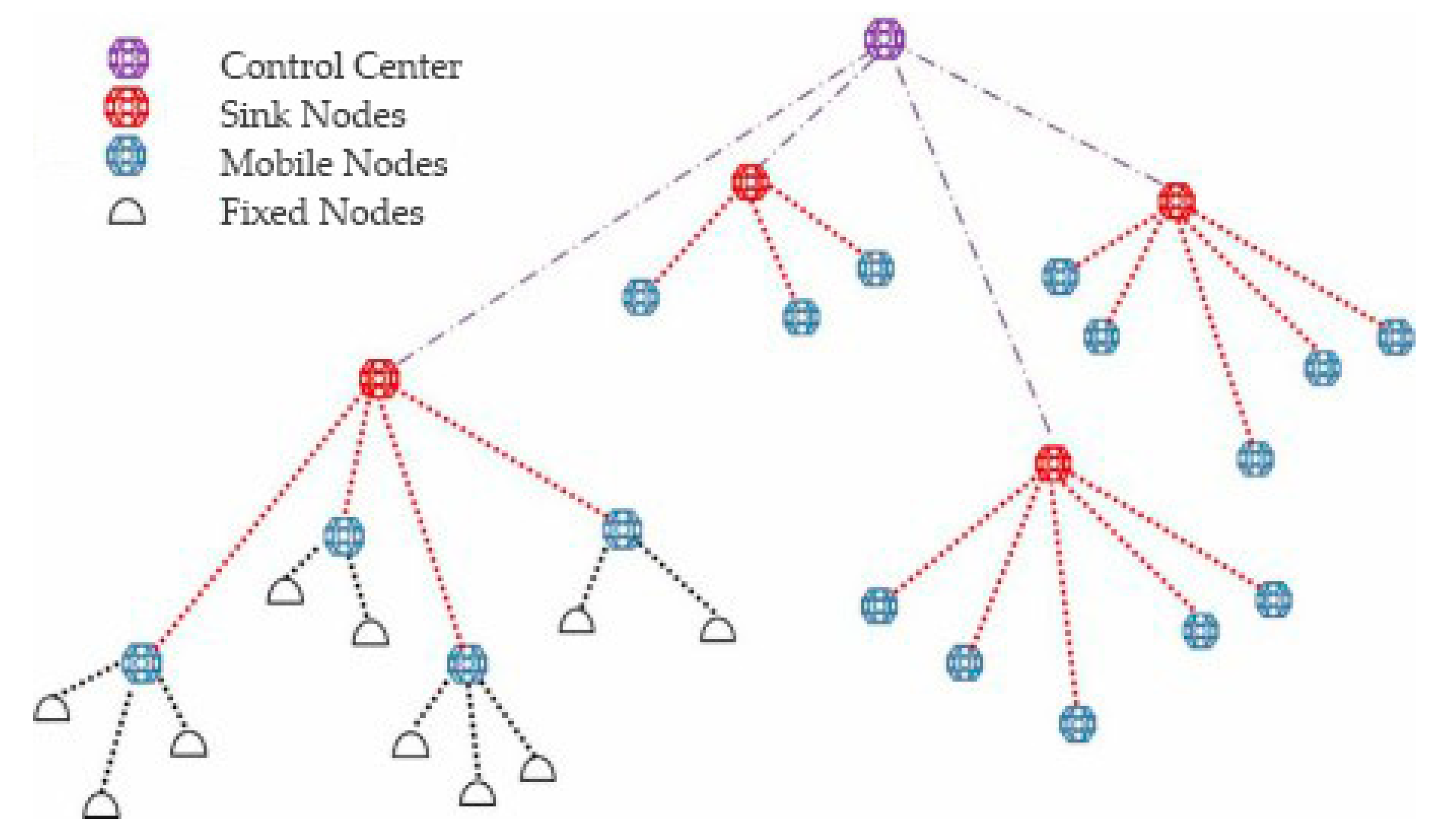
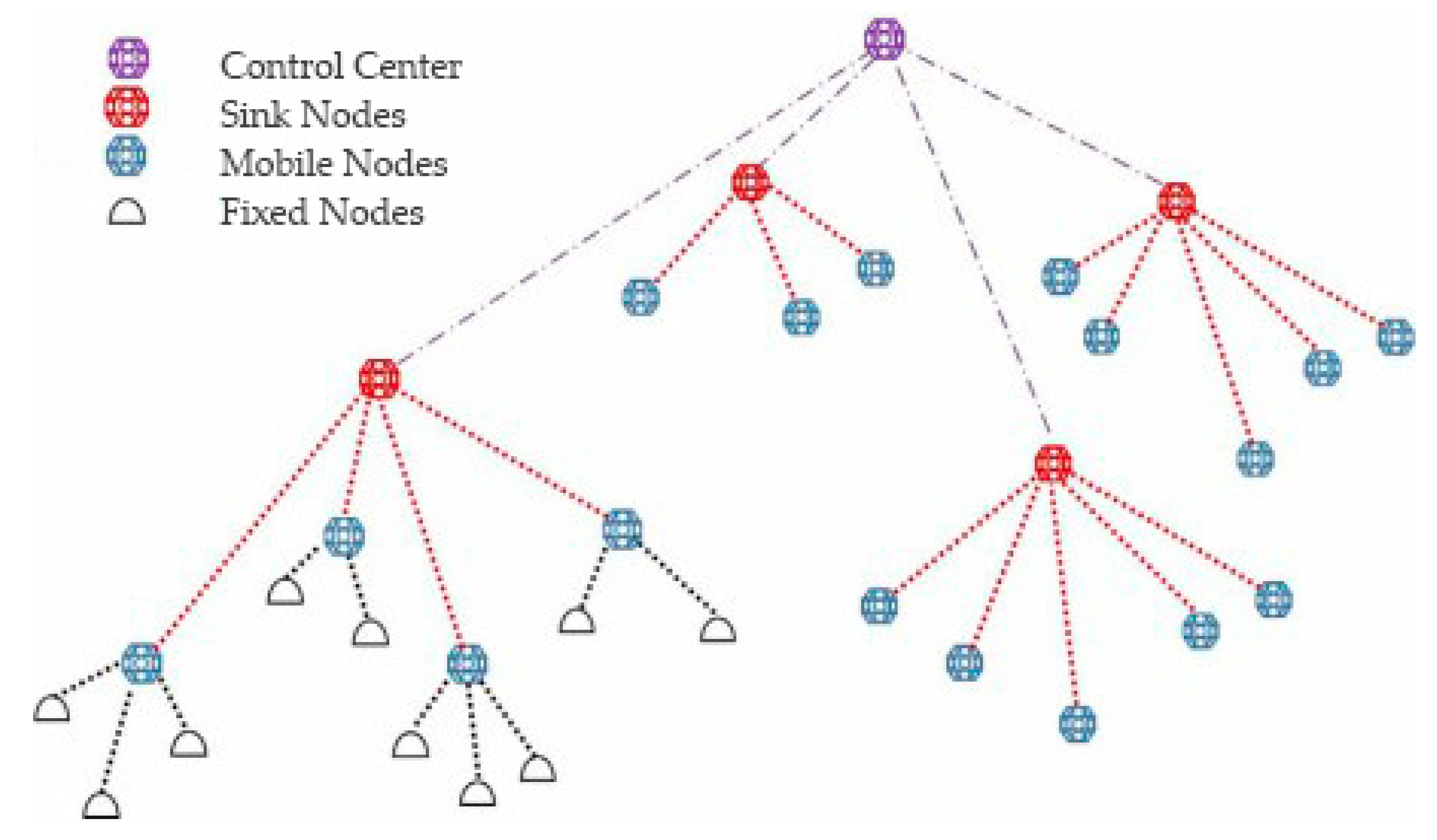
2. Underwater Optical-Acoustic Hybrid Wireless Sensor Network Topology and Data Transmission Process
3. OA-UWSN MAC Protocol Design
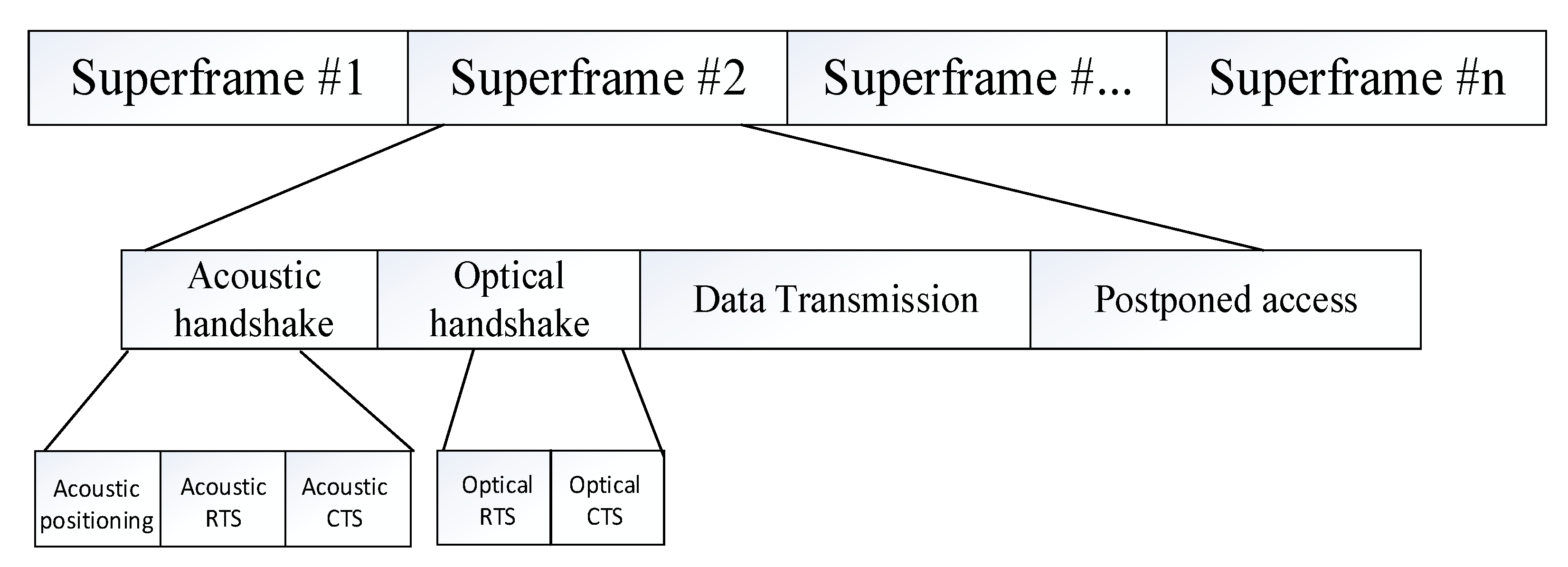
3.1. Data Link Layer Channel Access
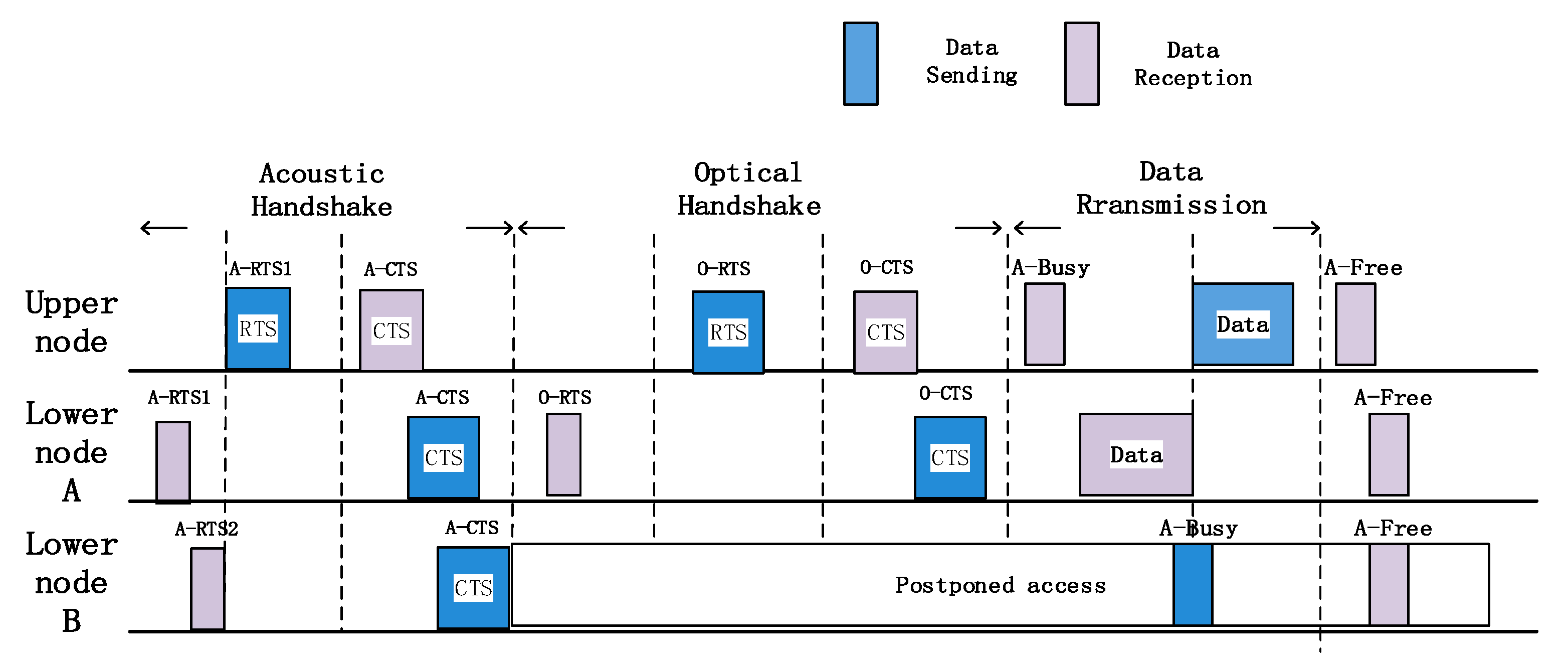
3.2. Data Transmission, Reception, and Confirmation
- The mobile node is bound to a pressure sensor, which can measure its depth and send an acoustic interrogation signal at a certain frequency. This signal can reach the water surface directly at Time 0, or it can be forwarded by the fixed node and reach the water surface at Time 1. The time difference and the measured depth are used to locate the mobile node [22];
- The lower nodes A and B need to send acoustic RTS1 and RTS2, respectively, to perform an acoustic handshake. The acoustic RTS (Request to Send) includes information such as location so that the next optical handshake can be completed more smoothly;
- After receiving the first RTS1, the upper node immediately replies with an acoustic CTS (Clear to Send). If all the nodes receive the CTS, they can know which nodes are competing to the channel, and the uncommitted nodes perform postponed access and wait for the channel to be idle;
- After successful competition, the lower node A sends an optical RTS to perform an optical handshake. After receiving the RTS, the upper node responds with an optical CTS to confirm whether the communication mode is optical or acoustic;
- If the optical handshaking is not completed within the time slot, the node that competes in the channel through the acoustic handshake performs acoustic communication with the upper node. If the two instances of handshaking are successful, optical data communication is performed. At this time, the upper node broadcasts a busy-tone signal through the acoustic signal to notify all lower nodes that it is busy, and the node that succeeded in competition performs optical communication according to the communication mode, modulation, and coding information determined by the optical handshaking;
- After the end of one frame of data transmission, the upper node first sends an ACK (Acknowledgement) confirmation signal to the lower node. Then the upper node broadcasts a free signal through the acoustic signal, and all lower nodes recompete for the next frame of information transmission.
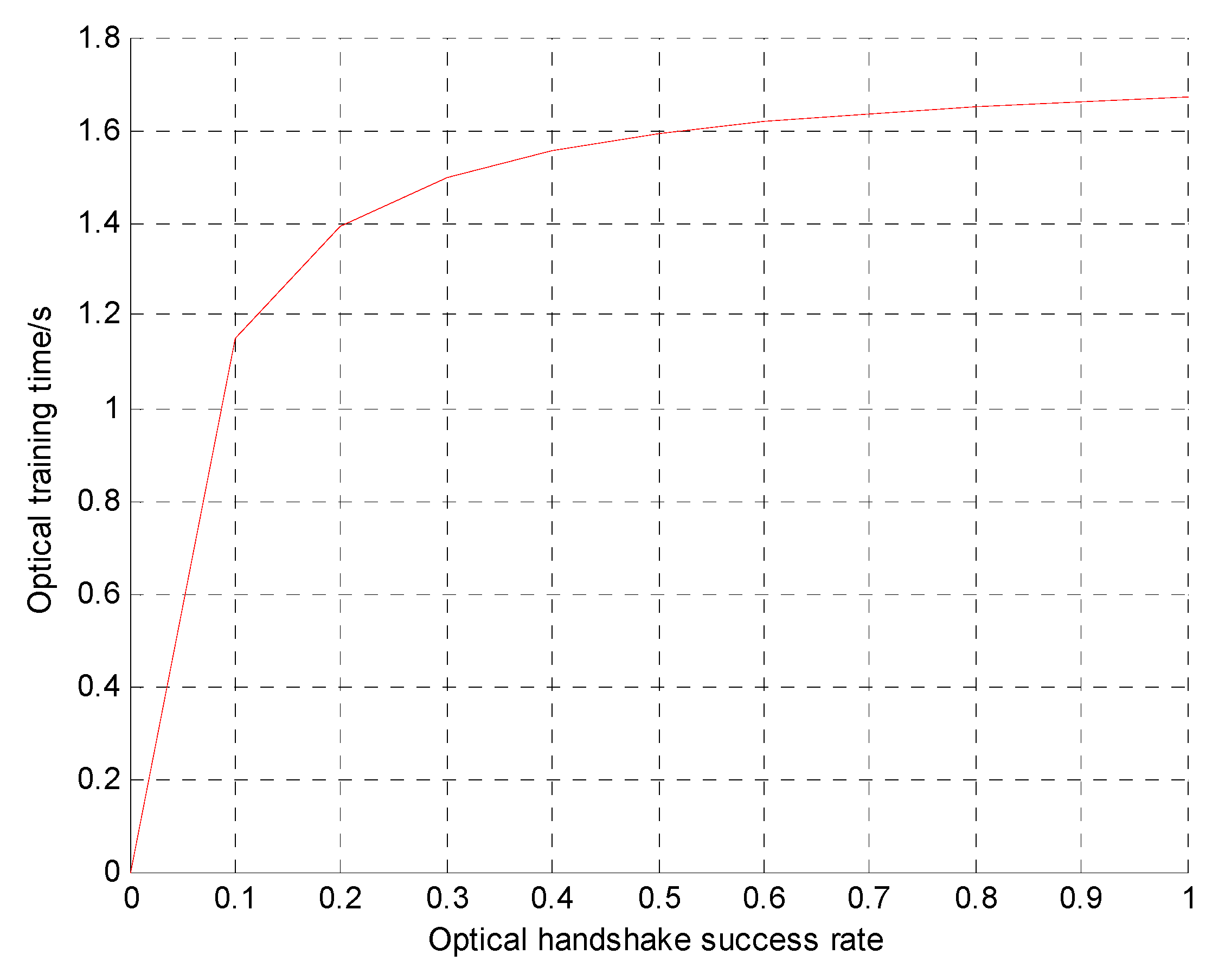
3.3. Analysis of the Upper Limit of the Optical Handshake Time
4. OA-UWSN MAC Protocol Simulation Environment Settings
4.1. Optical Properties of Underwater Channels
4.1.1. Attenuation Effect of Water
4.1.2. The Model of Energy Attenuation
4.2. Acoustic Properties of Underwater Channels
4.2.1. Propagation Loss
4.2.2. The Model of Energy Attenuation
5. Simulation Results
5.1. Simulation Parameters
5.2. Simulation Results
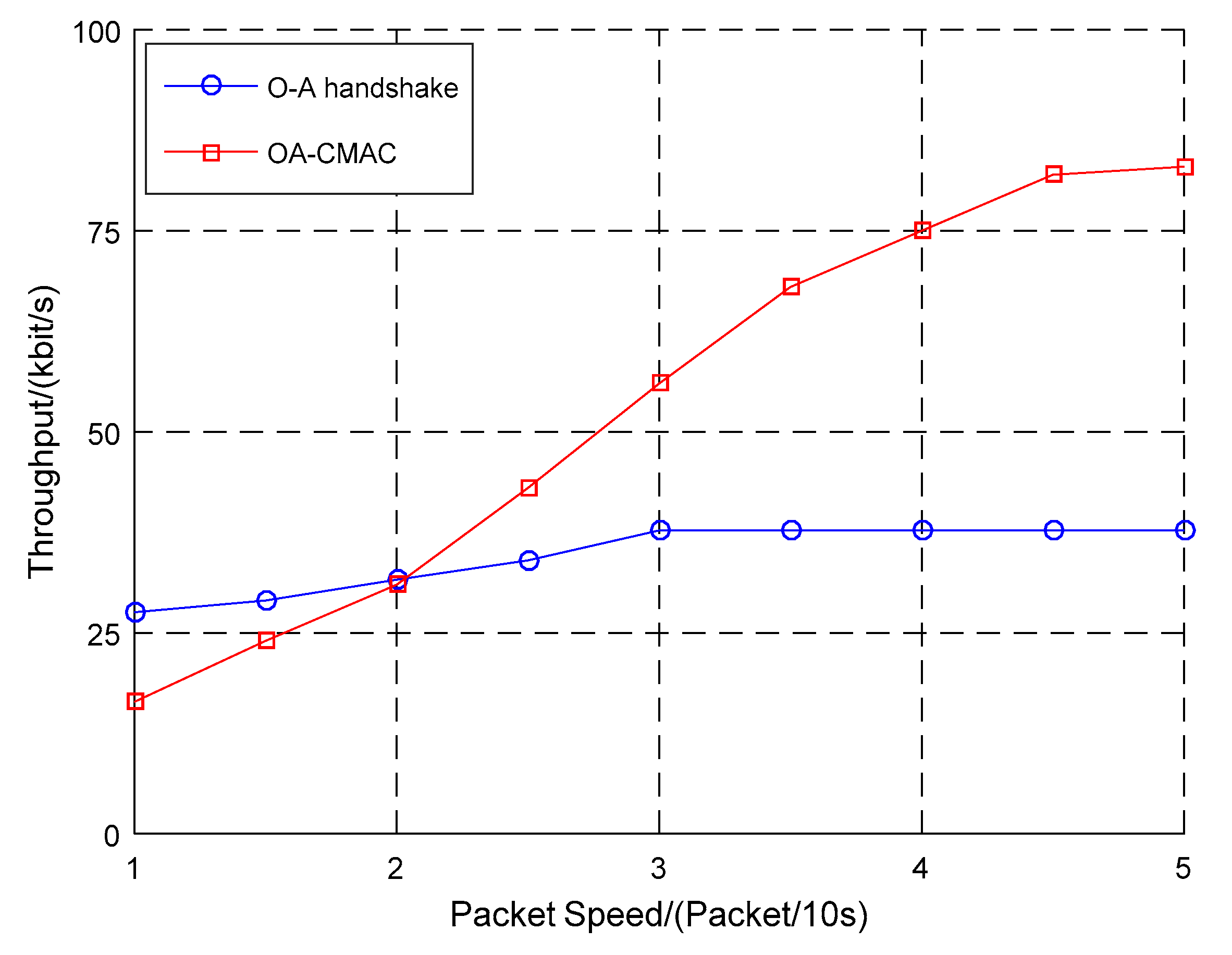
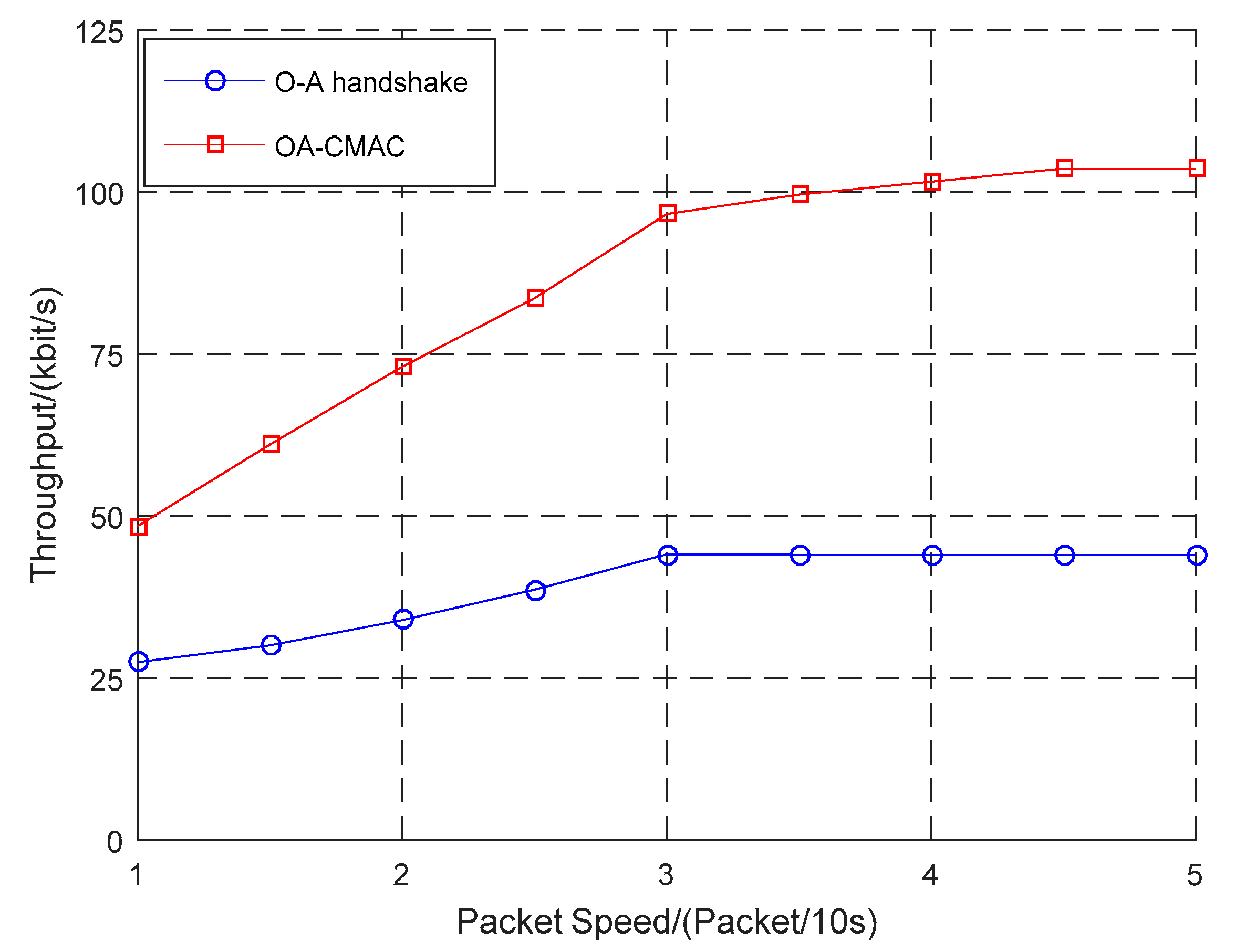
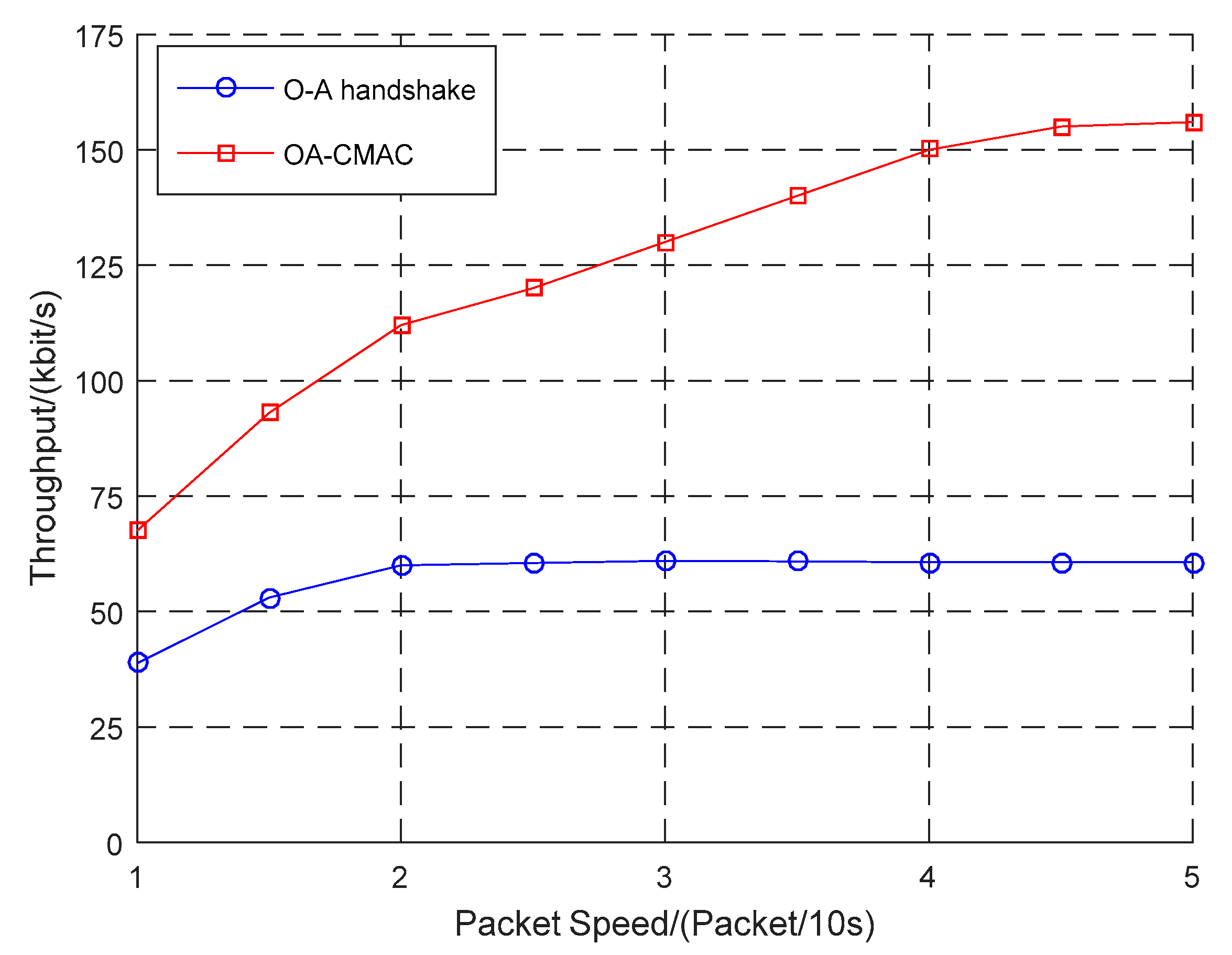
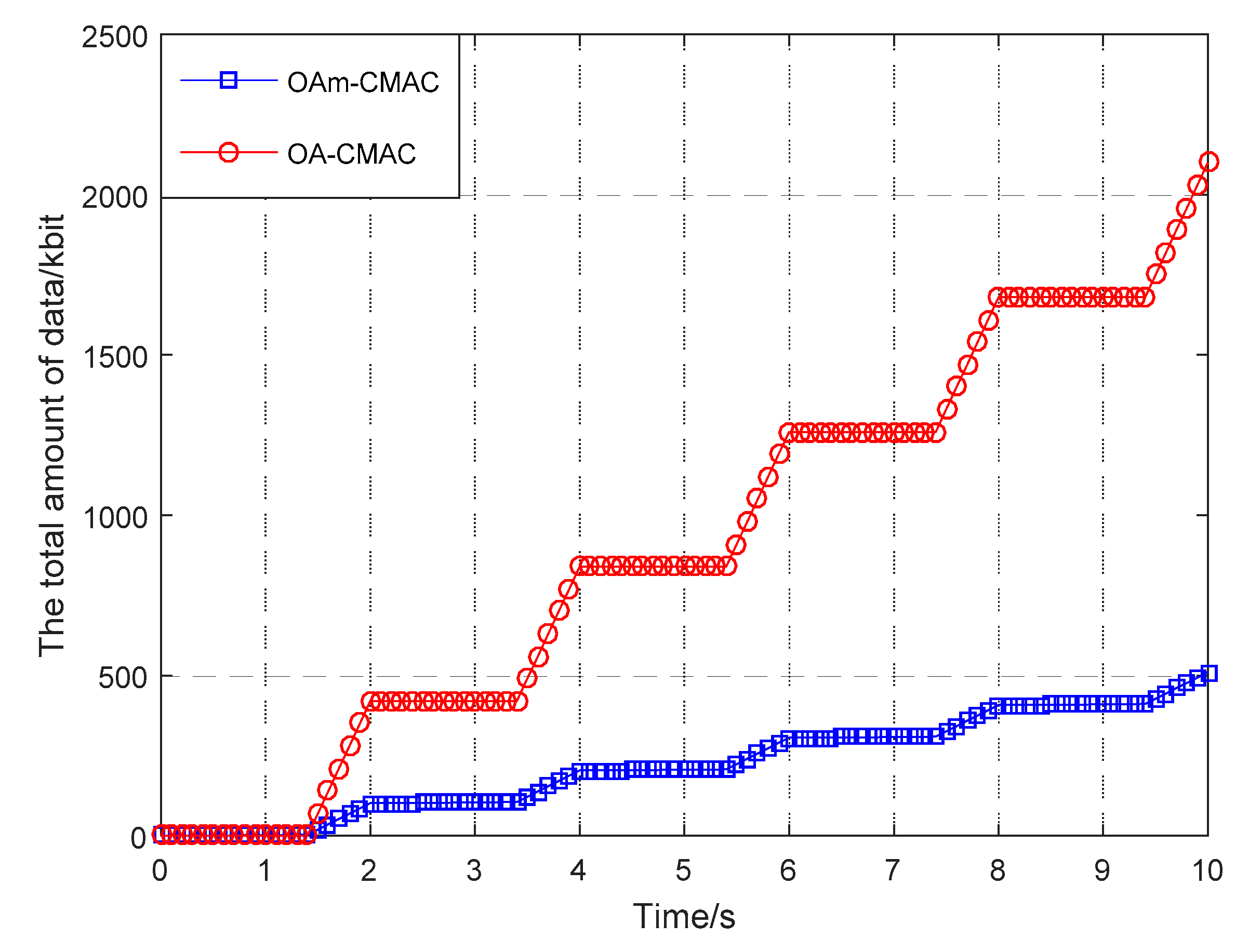
5.2.1. OA-CMAC Protocol Throughput
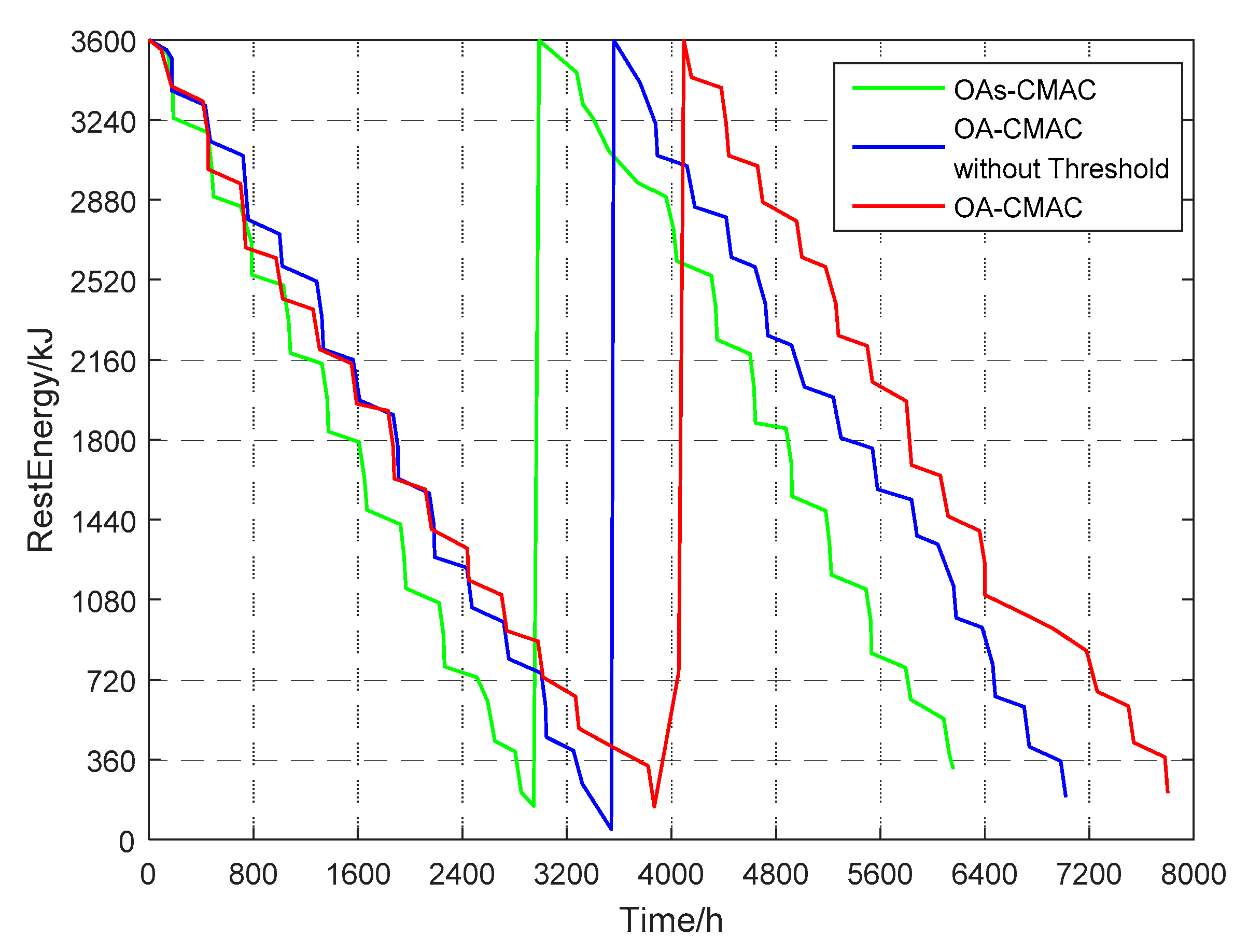
5.2.2. OA-CMAC Protocol Node Energy Consumption Simulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A Survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Chang, H.Y.; Su, H.M.; Choi, J.W. Sensor localization-based distributed target tracking filter in underwater sensor networks. In Proceedings of the IEEE Society of Instrument and Control Engineers of Japan, Hangzhou, China, 28–30 July 2015; Volume 2, pp. 706–711. [Google Scholar]
- Cayirci, E.; Tezcan, H.; Dogan, Y.; Coskun, V. Wireless sensor networks for underwater survelliance systems. Ad Hoc Netw. 2006, 4, 431–446. [Google Scholar] [CrossRef]
- Xu, L.W.; Wang, J.J.; Zhang, H.; Gulliver, T.A. Performance Analysis of IAF Relaying Mobile D2D Cooperative Networks. J. Frankl. Inst. 2017, 354, 902–916. [Google Scholar] [CrossRef]
- Han, G.J.; Shen, S.J.; Song, H.B.; Yang, T.; Zhang, W.B. A Stratification Based Data Collection Scheme in Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2018, 67, 10671–10682. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Jiang, S. On Reliable Data Transfer in Underwater Acoustic Networks: A Survey from Networking Perspective. Ieee Commun. Surv. Tutor. 2018, 99, 1036–1054. [Google Scholar] [CrossRef]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Optical Wireless Communications. Ieee Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. Ieee Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Campagnaro, F.; Francescon, R.; Casari, P.; Diamant, R.; Zorzi, M. Multimodal Underwater Networks: Recent Advances and a Look Ahead. In Proceedings of the International Conference on Underwater Networks & Systems, Halifax, NS, Canada, 6–8 November 2017; pp. 1–8. [Google Scholar]
- Diamant, R.; Casari, P.; Campagnaro, F.; Kebkal, O.; Kebkal, V.; Zorzi, M. Fair and Throughput-Optimal Routing in Multi-Modal Underwater Networks. Ieee Trans. Wirel. Commun. 2018, 17, 1738–1754. [Google Scholar] [CrossRef]
- Gjanci, P.; Petrioli, C.; Basagni, S.; Phillips, C.A.; Bölöni, L.; Turgut, D. Path Finding for Maximum Value of Information in Multi-modal Underwater Wireless Sensor Networks. Ieee Trans. Mob. Comput. 2018, 17, 404–418. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Liang, R.; Chen, R.; Cheng, Y.J.; Gerla, M. Evaluation of Underwater Optical-Acoustic Hybrid Network. China Commun. 2014, 11, 49–59. [Google Scholar]
- Doniec, M.; Topor, I.; Chitre, M.; Rus, D. Autonomous, Localization-Free Underwater Data Muling Using Acoustic and Optical Communication. In Experimental Robotics; Springer International Publishing: Heidelberg, Germany, 2013; Volume 88, pp. 841–857. [Google Scholar]
- Wang, J.J.; Shi, W.; Xu, L.W.; Zhou, L.; Niu, Q. Design of optical-acoustic hybrid underwater wireless sensor network. J. Netw. Comput. Appl. 2017, 92, 59–67. [Google Scholar] [CrossRef]
- Jiang, S. State-of-the-Art Medium Access Control (MAC) Protocols for Underwater Acoustic Networks: A Survey Based on a MAC Reference Model. Ieee Commun. Surv. Tutor. 2018, 20, 96–131. [Google Scholar] [CrossRef]
- Hu, T.; Fei, Y. MURAO: A multi-level routing protocol for acoustic-optical hybrid underwater wireless sensor networks. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012. [Google Scholar]
- Hong, L.; Hong, F.; Guo, Z.; Yang, X. A TDMA-Based MAC Protocol in Underwater Sensor Networks. In Proceedings of the 2008 4th International Conference on Wireless Communications, Networking and Mobile Computing, Dalian, China, 12–14 October 2008; pp. 1–4. [Google Scholar]
- Molins, M.; Stojanovic, M. Slotted FAMA: A MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2006-Asia Pacific, Boston, MA, USA, 18–22 September 2006; Volume 4, pp. 1–7. [Google Scholar]
- Chen, Y.J.; Wang, H.L. Ordered CSMA: A collision-free MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar]
- Syed, A.A.; Ye, W.; Heidemann, J. T-Lohi: A New Class of MAC Protocols for Underwater Acoustic Sensor Networks. In Proceedings of the INFOCOM 2008—The Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 231–235. [Google Scholar]
- Kussat, N.H.; Chadwell, C.D.; Zimmerman, R. Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements. Ieee J. Ocean. Eng. 2005, 30, 153–164. [Google Scholar] [CrossRef]
- Chen, F. Optical Characteristics of Optical Channels on Airborne Laser Sounding. Appl. Opt. 2000, 21, 32–38. [Google Scholar]
- Akhoundi, F.; Minoofar, A.; Salehi, J.A. Underwater positioning system based on cellular underwater wireless optical CDMA networks. In Proceedings of the Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 7–8 April 2017; pp. 1–3. [Google Scholar]
- Sathyendranath, S.; Prieur, L.; Morel, A. A three-component model of ocean color and its application to remote sensing of phytoplankton pigments in coastal waters. Int. J. Remote Sens. 1989, 10, 1373–1394. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Energy harvesting hybrid acoustic-optical underwater wireless sensor networks localization. Sensors 2018, 18, 51. [Google Scholar] [CrossRef]
- Wu, D. Lidar measurement of ocean suspended matter. Acta Opt. Sin. 2003, 23, 245–248. [Google Scholar]
- Shifrin, K. Physical Optics of Ocean Water; AIP Press: New York, NY, USA, 1998. [Google Scholar]
- Sagan, S.; Weeks, A.R.; Robinson, I.S.; Moore, G.F.; Aiken, J. The relationship between beam attenuation and chlorophyll concentration and reflectance in Antarctic waters. Deep Sea Res. Part Ii Top. Stud. Oceanogr. 1995, 42, 983–996. [Google Scholar] [CrossRef]
- Fu, X.H.; Pang, F.F. Analyzing the receiving power of rectilinear mobile/free-space optical links by considering the effect of laser beam divergence and deflection angles. Opt. Eng. 2012, 51, 1–6. [Google Scholar] [CrossRef]
- Arnon, S.; Kedar, D. Non-line-of-sight underwater optical wireless communication network. J. Opt. Soc. Am. A 2009, 26, 530–539. [Google Scholar] [CrossRef]
- Qiao, G.; Babar, Z.; Ma, L.; Liu, S.; Wu, J. MIMO-OFDM underwater acoustic communication systems—A review. Phys. Commun. 2017, 23, 56–64. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. Ieee Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Jiang, P.; Yan, B.F. Cluster-based Underwater Sensor Network Coverage and Retention Routing Algorithm. Chin. J. Electron. 2013, 41, 2067–2073. [Google Scholar]
- Wang, P.; Li, C.; Zheng, J.; Mouftah, H.T. A Dependable Clustering Protocol for Survivable Underwater Sensor Networks. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008. [Google Scholar]
- Chen, Z.; Wang, J.J.; Wang, X.; Xu, L.W. A MAC protocol design for optical-acoustic hybrid underwater wireless sensor network. In Proceedings of the International Conference on Mobile Multimedia Communications, EAI, Qing Dao, China, 21–22 Jun 2018; pp. 1–6. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Frame length | 2 s |
| Acoustic handshaking time | 0.4 s |
| Optical handshaking time | d |
| Acoustic bit rate | 10 kbps |
| Optical bit rate | 1 Mbps |
| Parameters | Caliber D (mm) | Divergence Angle θ (mrad) | Sensitivity | Attenuation Coefficient | ||
|---|---|---|---|---|---|---|
| Value | 0.91 | 0.91 | 6 | 1.35 | 1 | 1.5371 |
| Parameters | P | F | R | k |
|---|---|---|---|---|
| Value | 3 mW | 25 kHz | 20 m–36 m | 1.5 |
| Parameters | Value |
|---|---|
| Fixed node | 8 |
| Mobile node | 4 |
| Sink node | 2 |
| Control center | 1 |
| Topological area | 500 m × 500 m |
| Distance between fixed nodes | 30 m |
| Distance between fixed node and mobile node | 20 m–36 m |
| Simulation time | 8000 h |
| Number of simulations | 1000 |
| Initial energy | 3600 kJ |
| Acoustic bit rate | 10 kbps |
| Optical bit rate | 1 Mbps |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Shen, J.; Shi, W.; Qiao, G.; Wu, S.; Wang, X. A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN. Sensors 2019, 19, 183. https://doi.org/10.3390/s19010183
Wang J, Shen J, Shi W, Qiao G, Wu S, Wang X. A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN. Sensors. 2019; 19(1):183. https://doi.org/10.3390/s19010183
Chicago/Turabian StyleWang, Jingjing, Jie Shen, Wei Shi, Gang Qiao, Shaoen Wu, and Xinjie Wang. 2019. "A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN" Sensors 19, no. 1: 183. https://doi.org/10.3390/s19010183
APA StyleWang, J., Shen, J., Shi, W., Qiao, G., Wu, S., & Wang, X. (2019). A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN. Sensors, 19(1), 183. https://doi.org/10.3390/s19010183