Optimal Design Based on Closed-Loop Fusion for Velocity Bandwidth Expansion of Optical Target Tracking System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Closed-Loop Fusion Framework
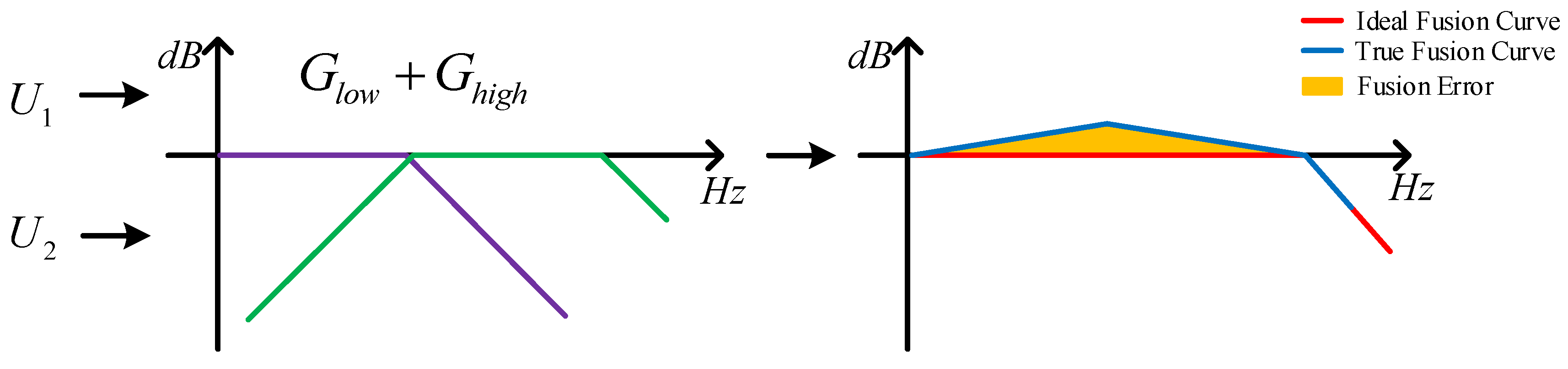
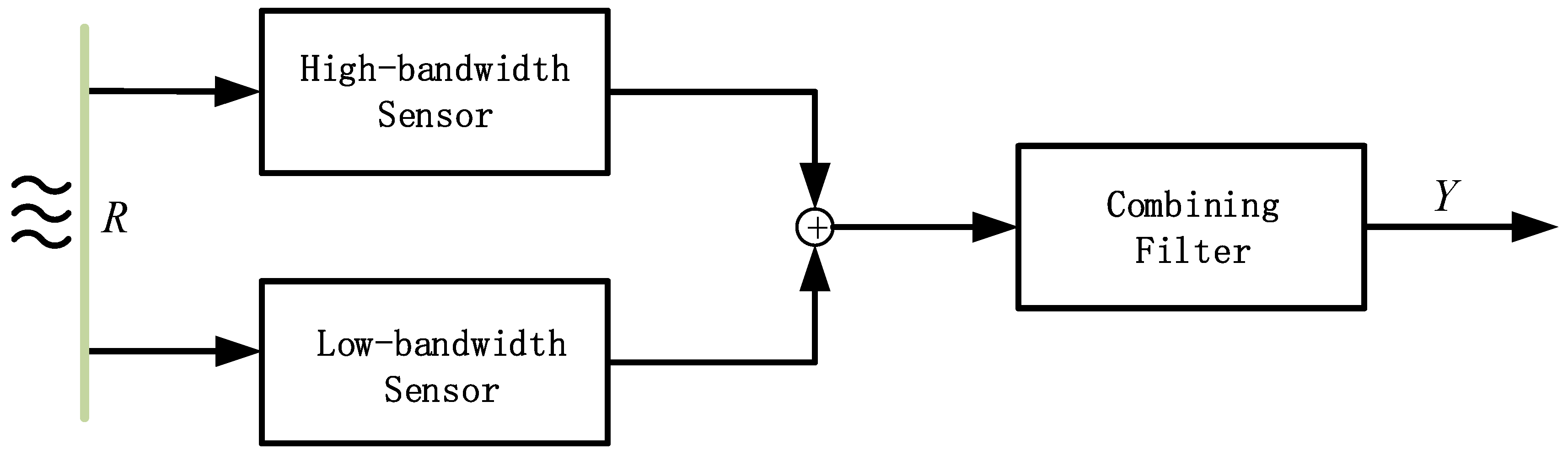
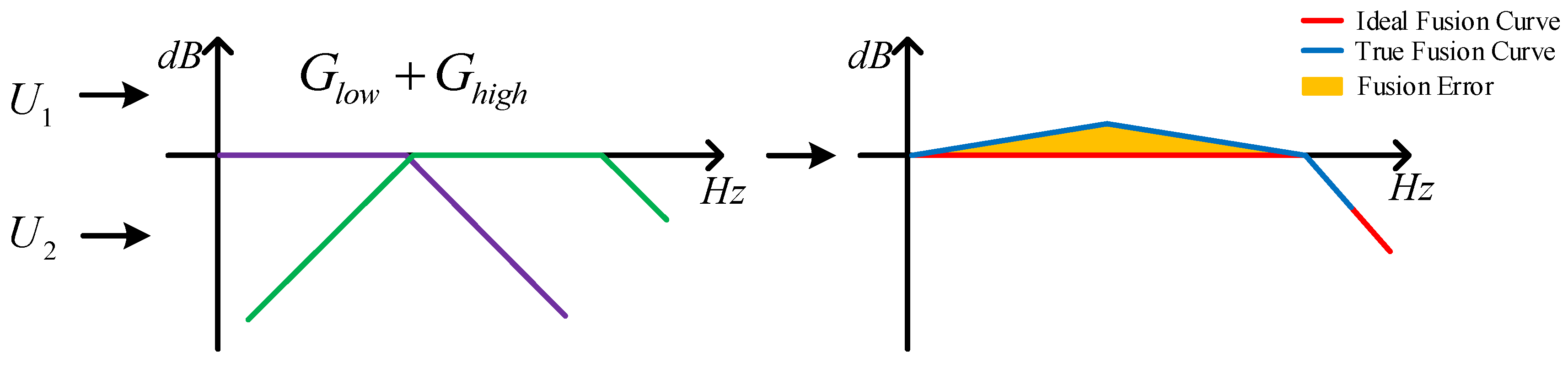
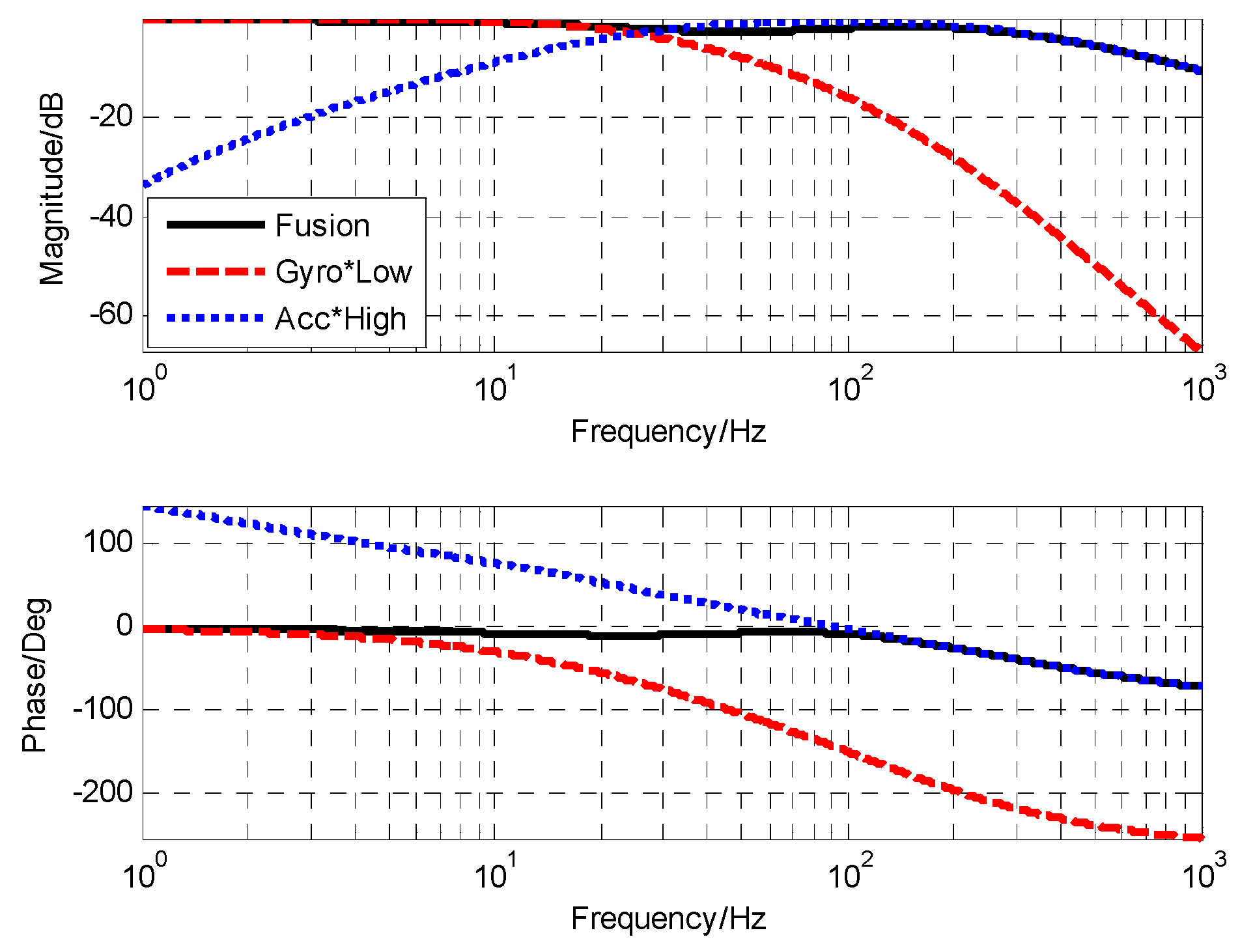
2.1. Basic Principle of Fusion
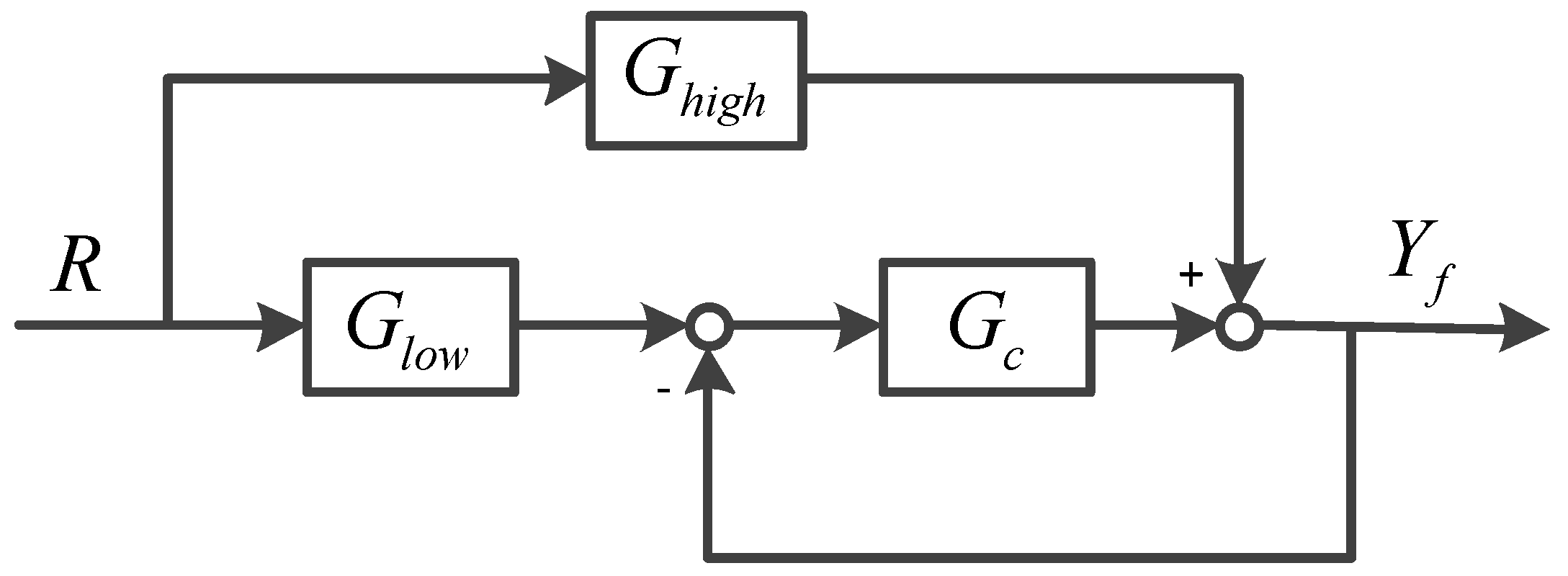
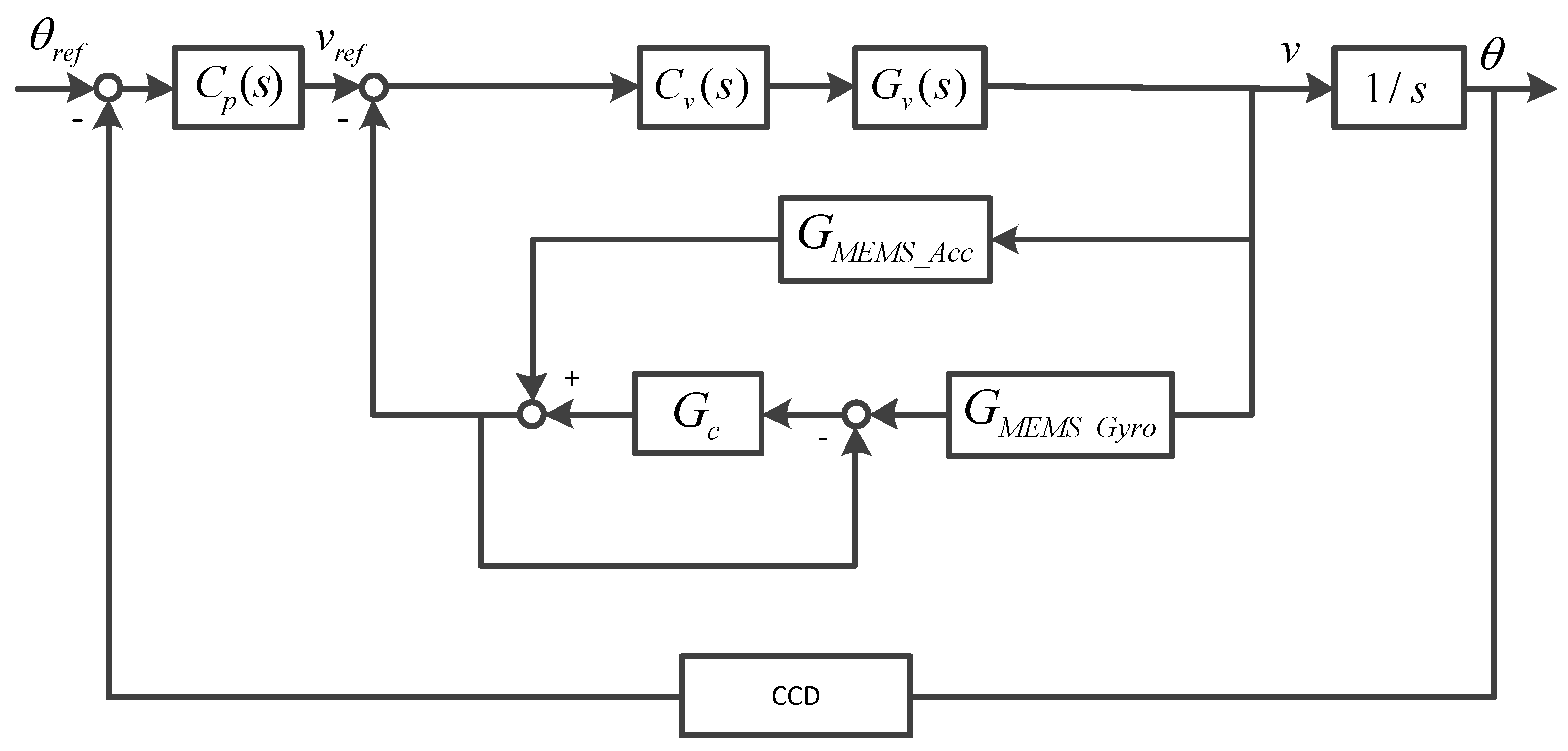
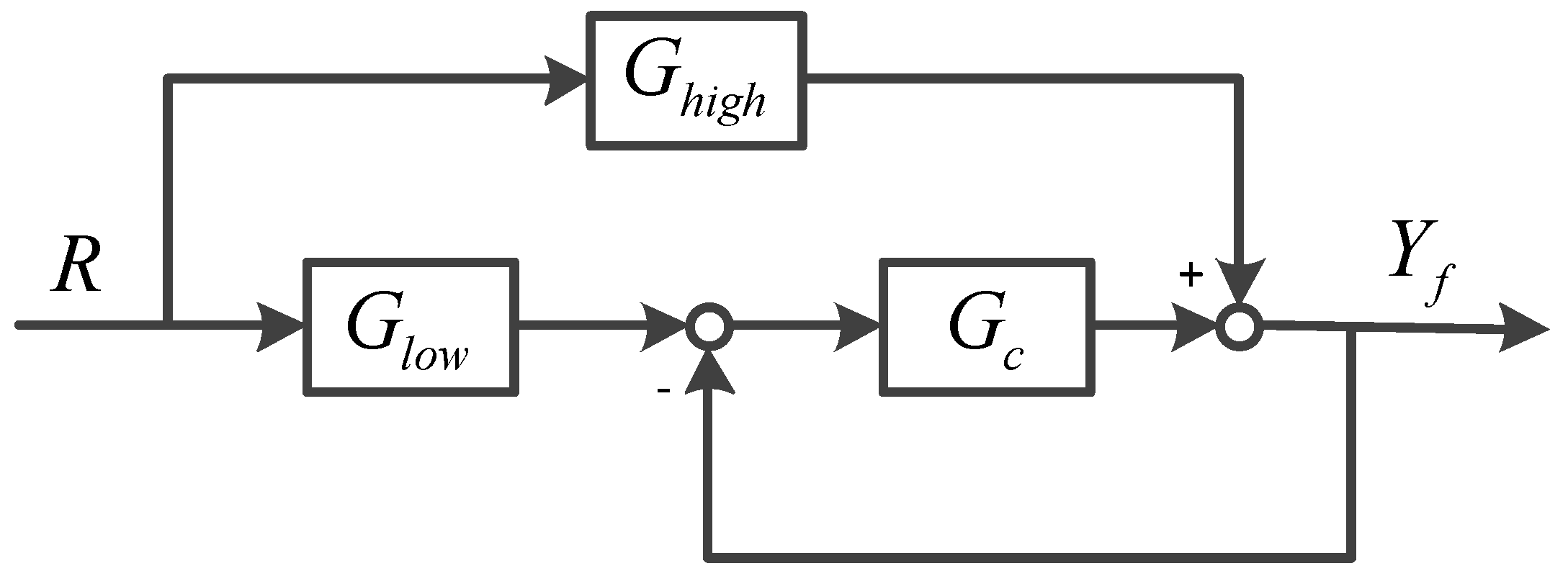
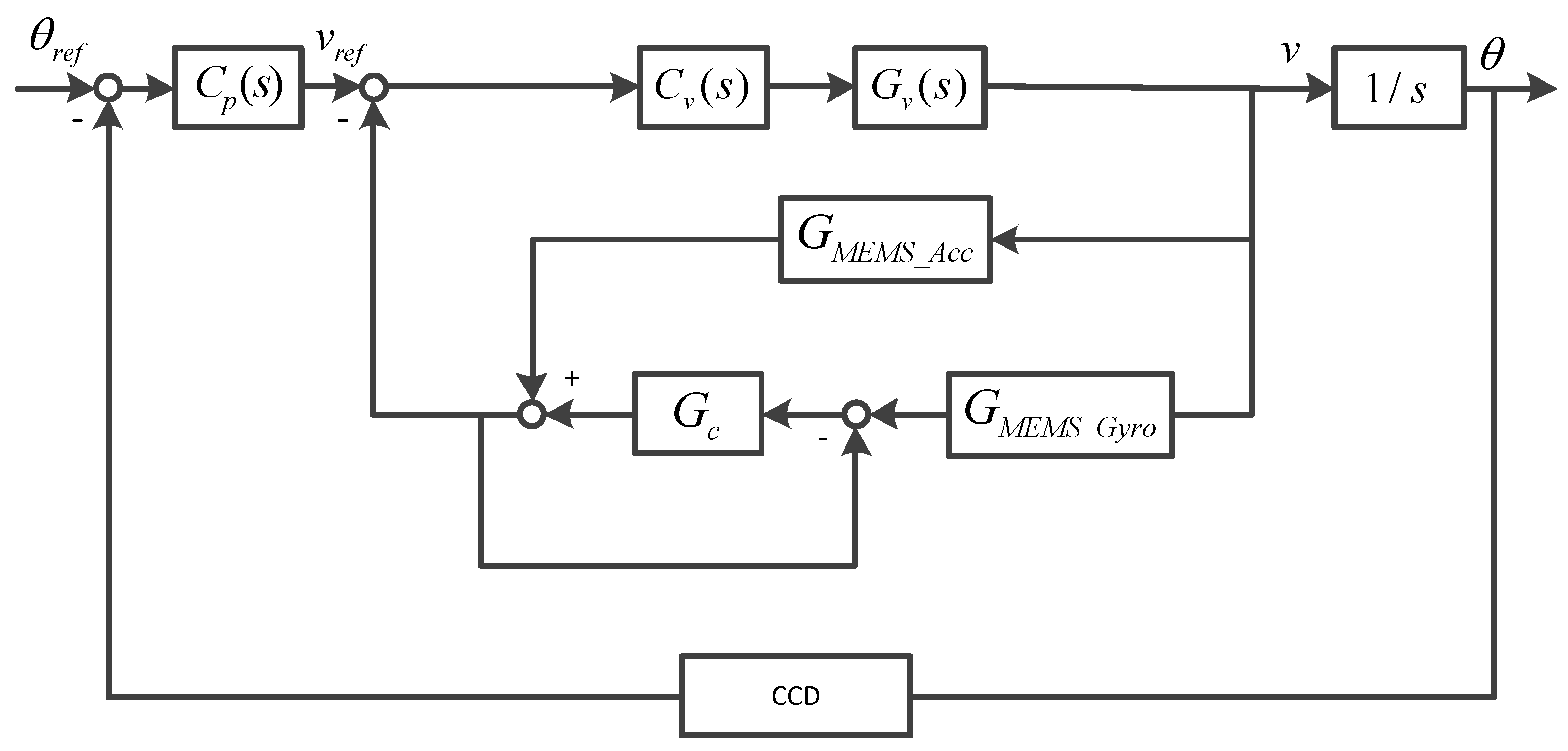
2.2. Closed-Loop Fusion Scheme
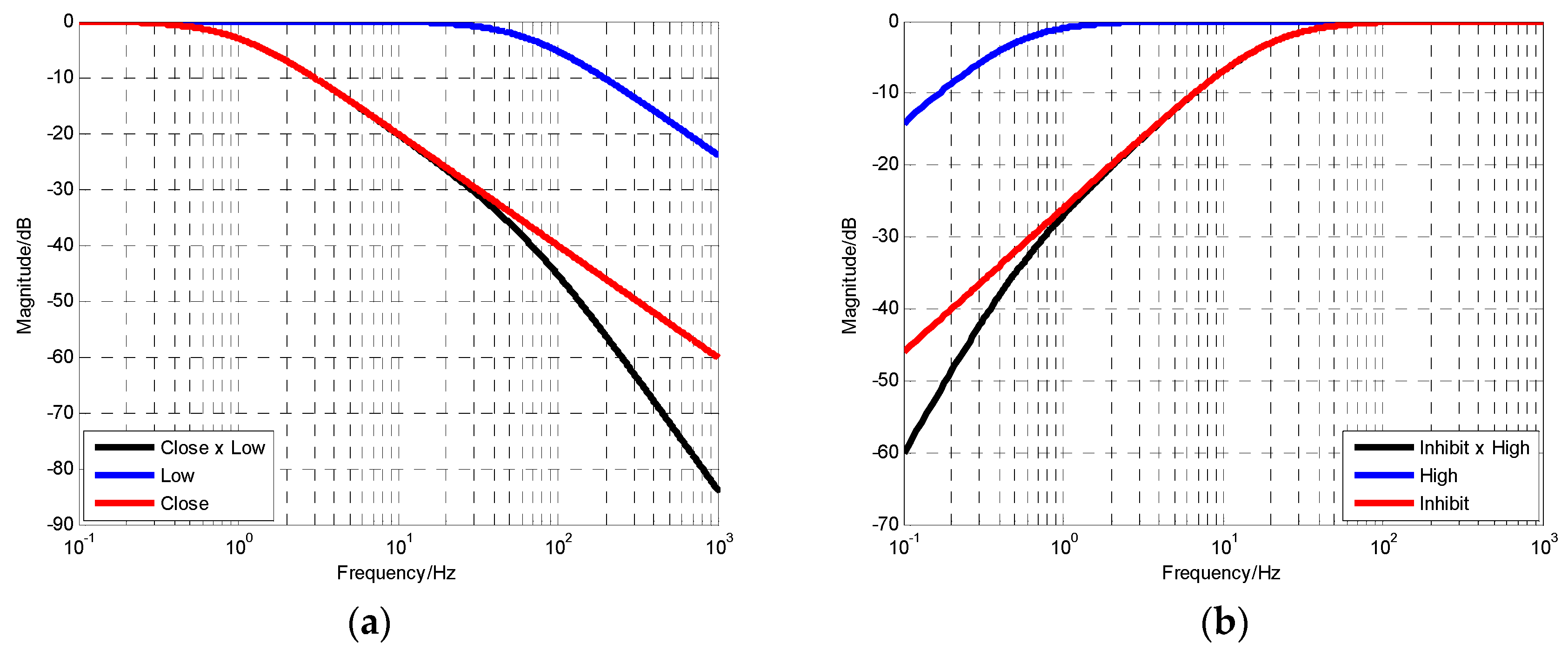
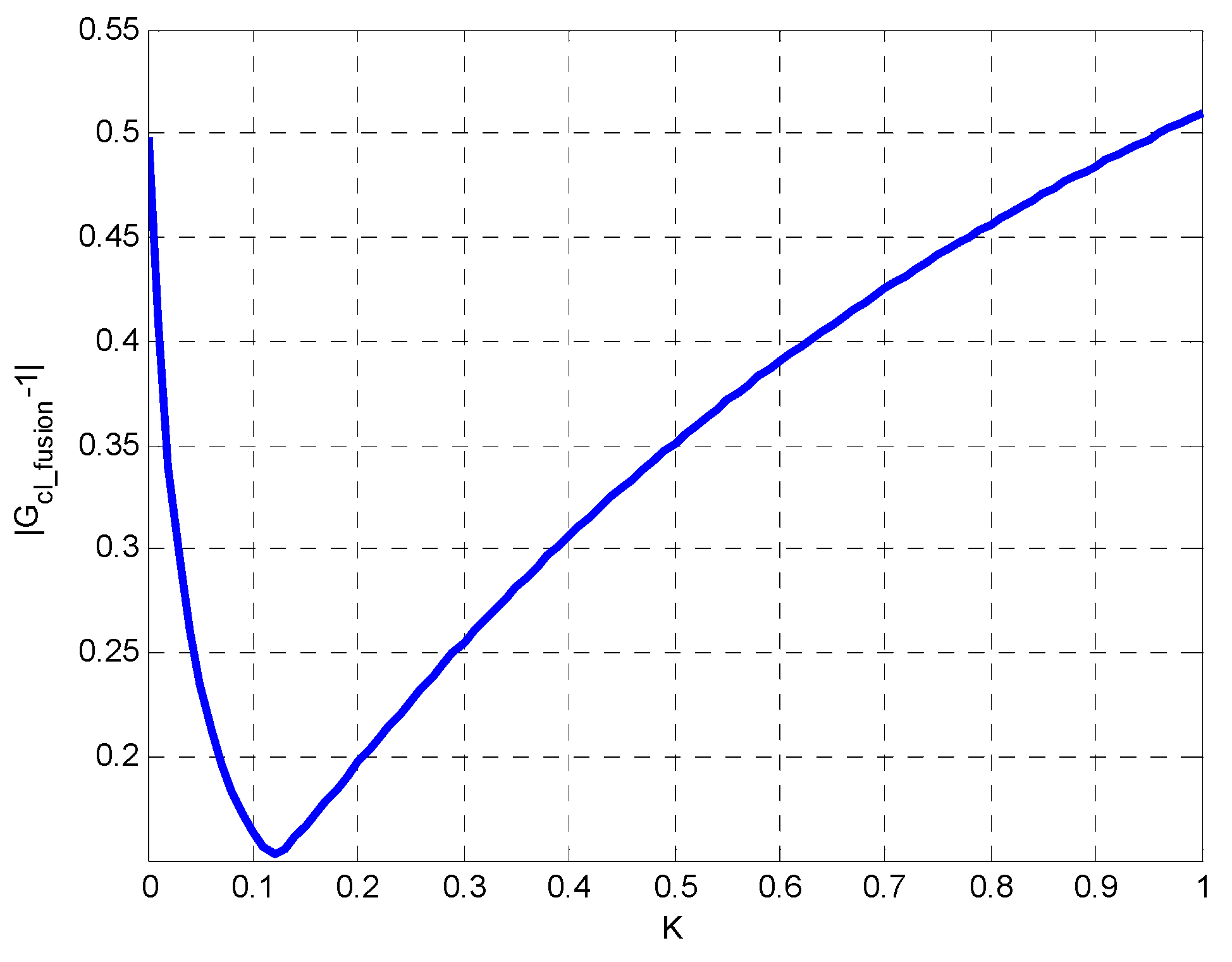
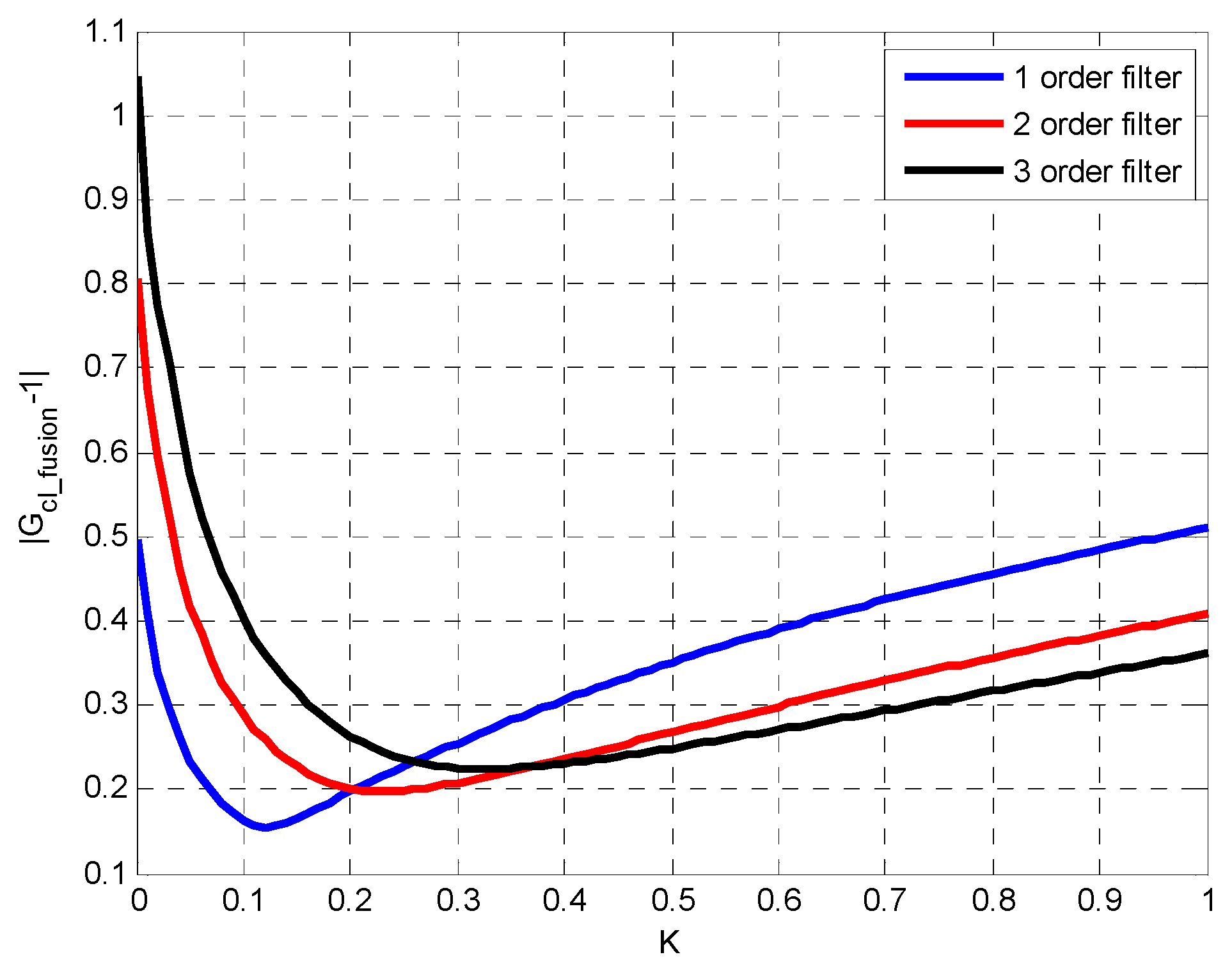
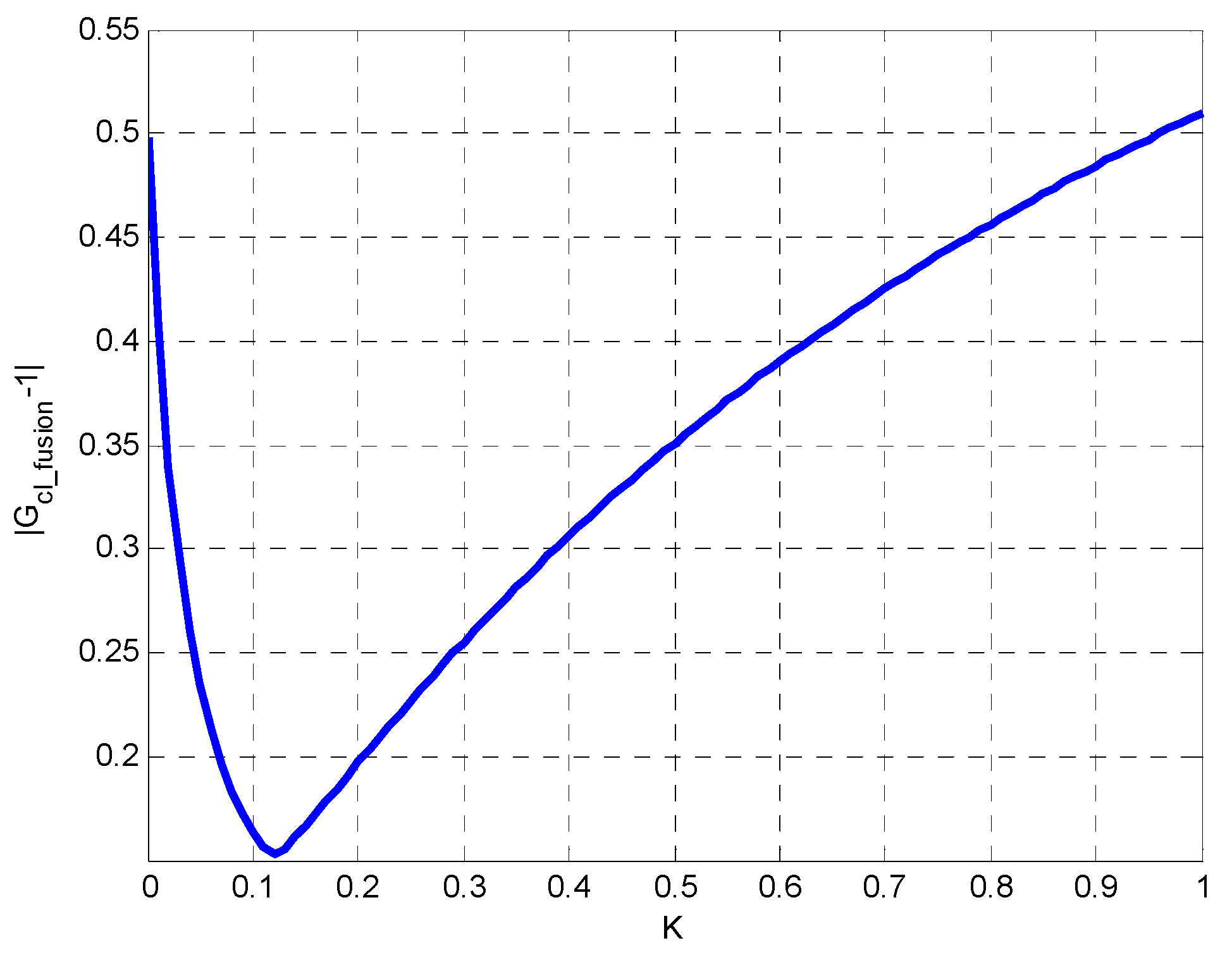
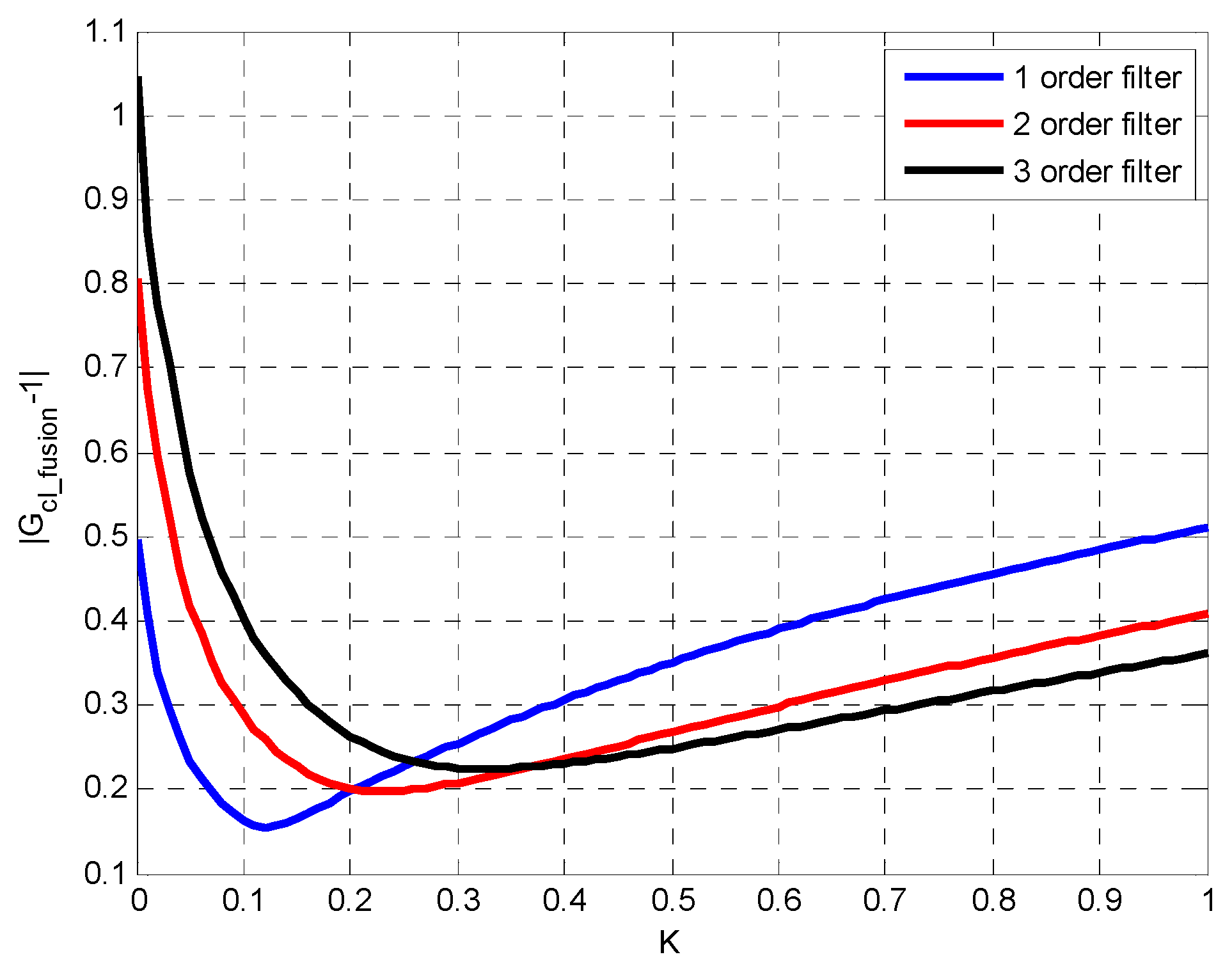
2.3. Closed-Loop Fusion Design
3. Inertial Sensors Fusion Experiment
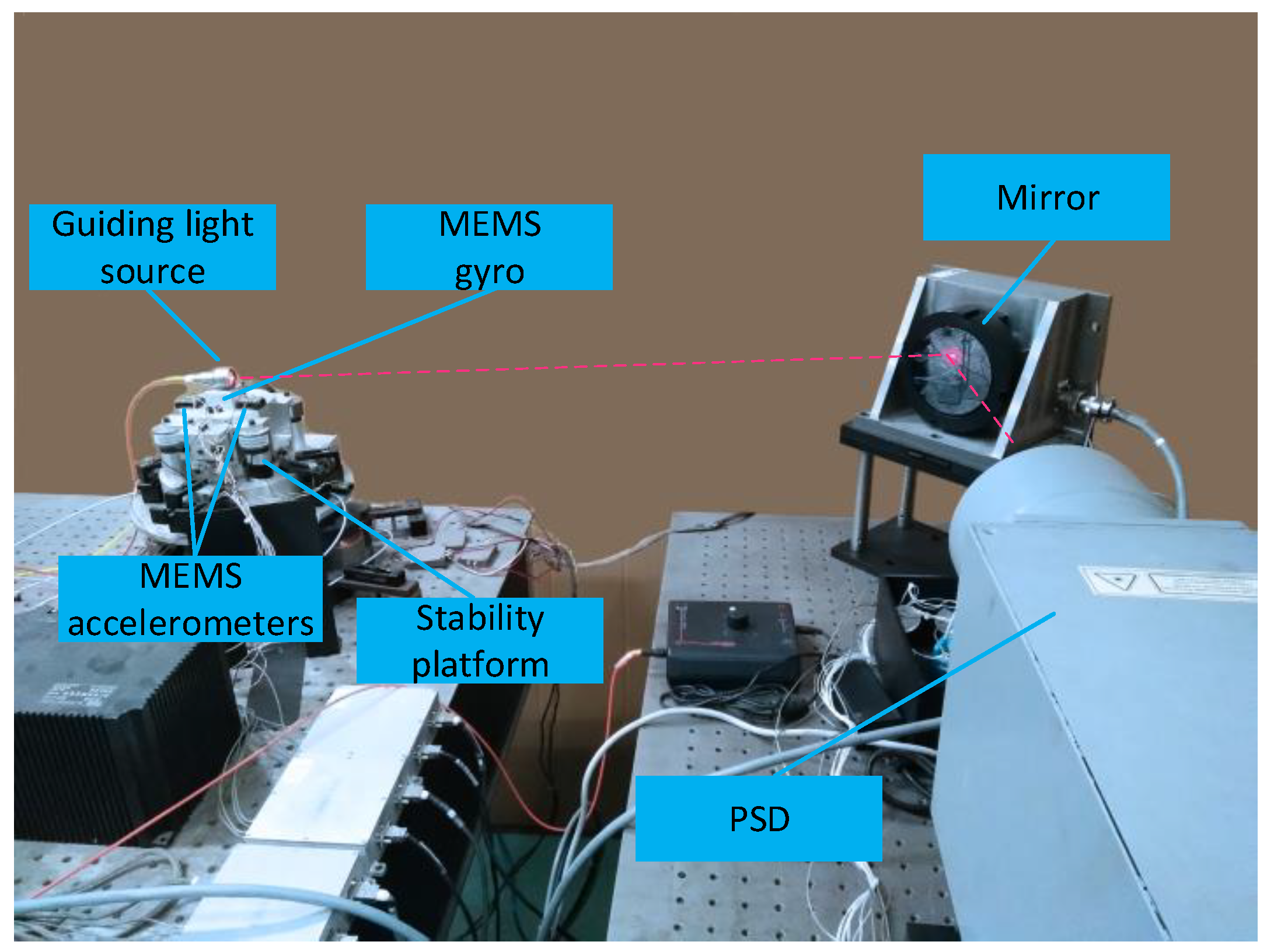
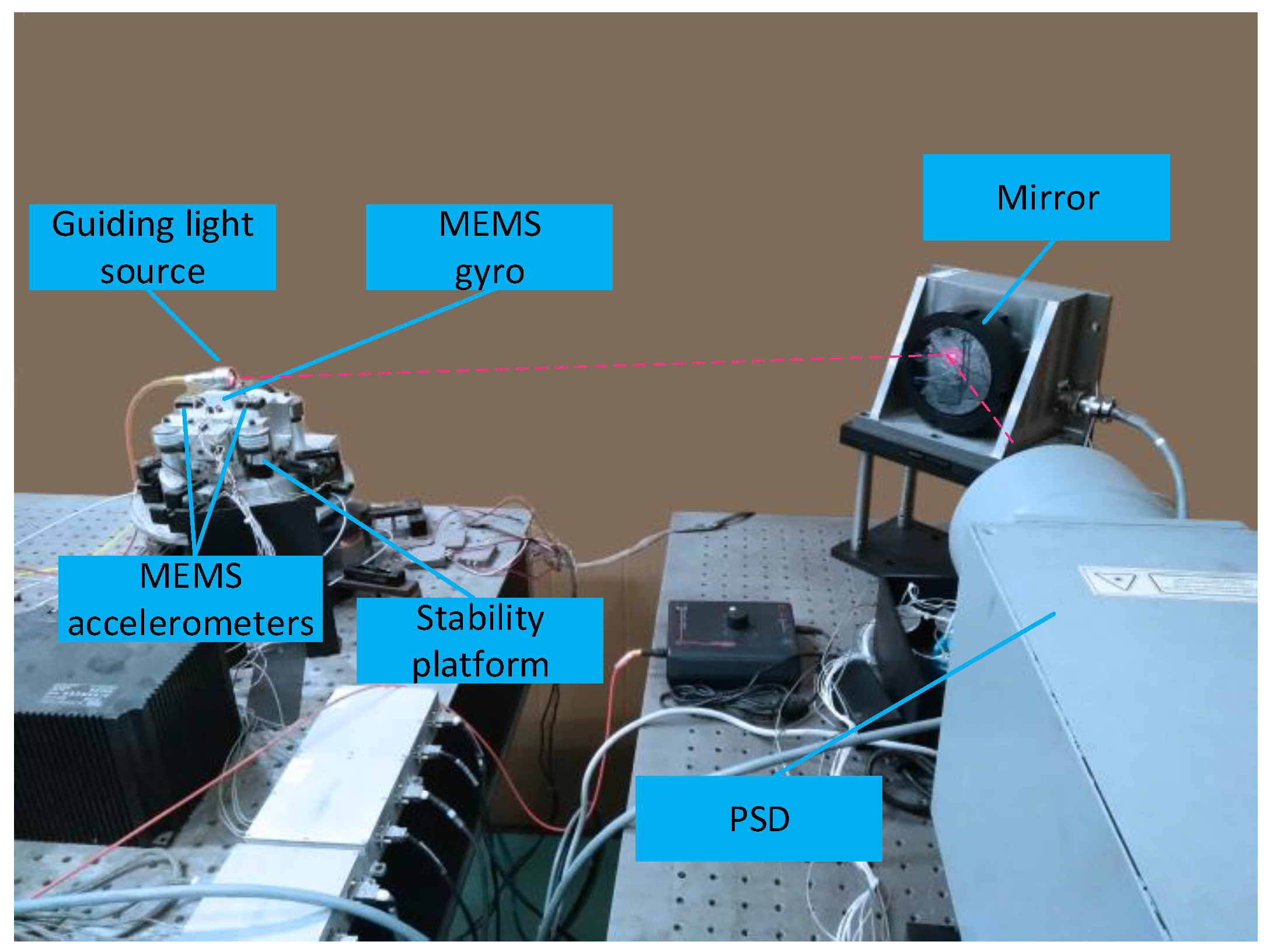
3.1. Optical Tracking Experimental Platform
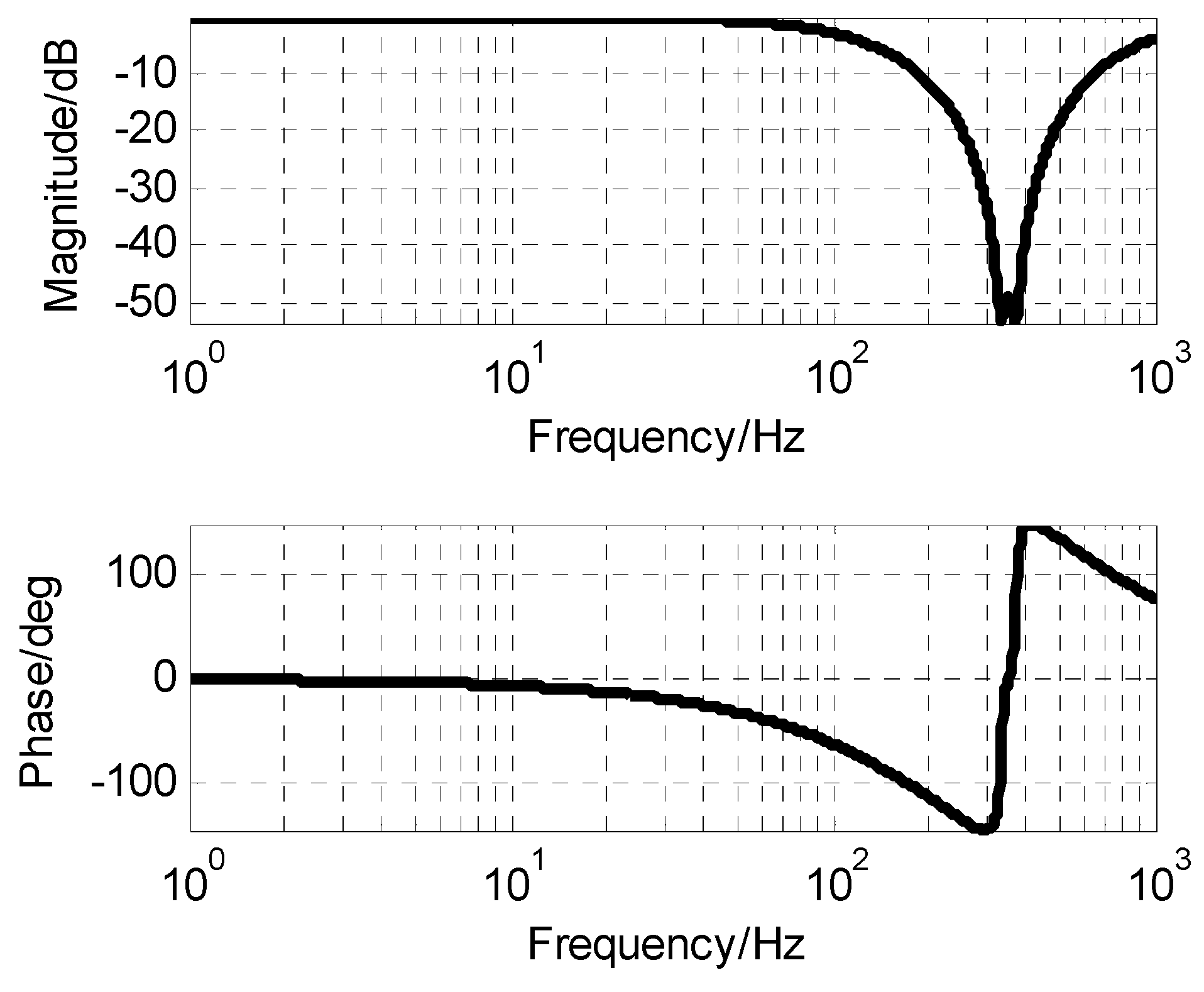
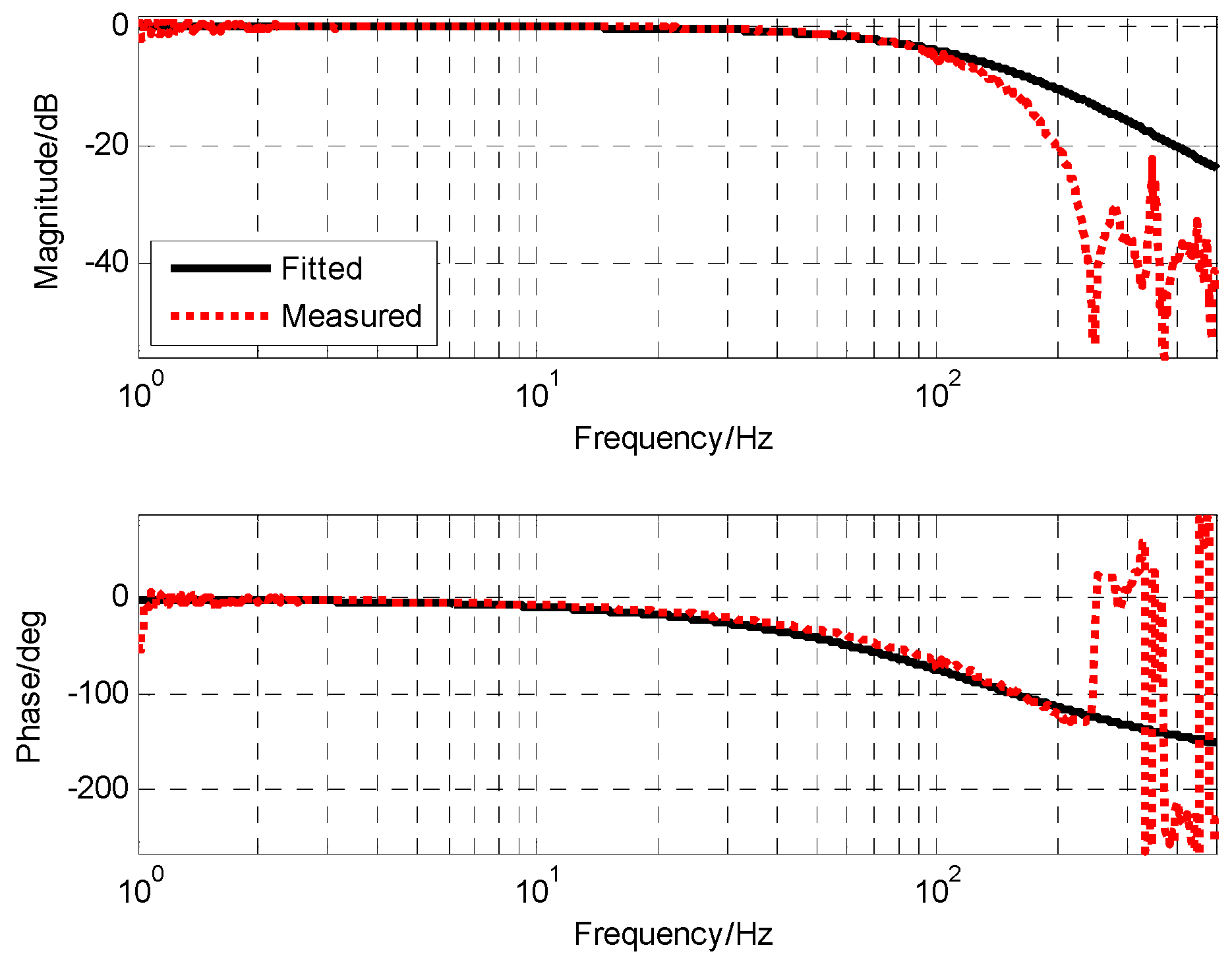
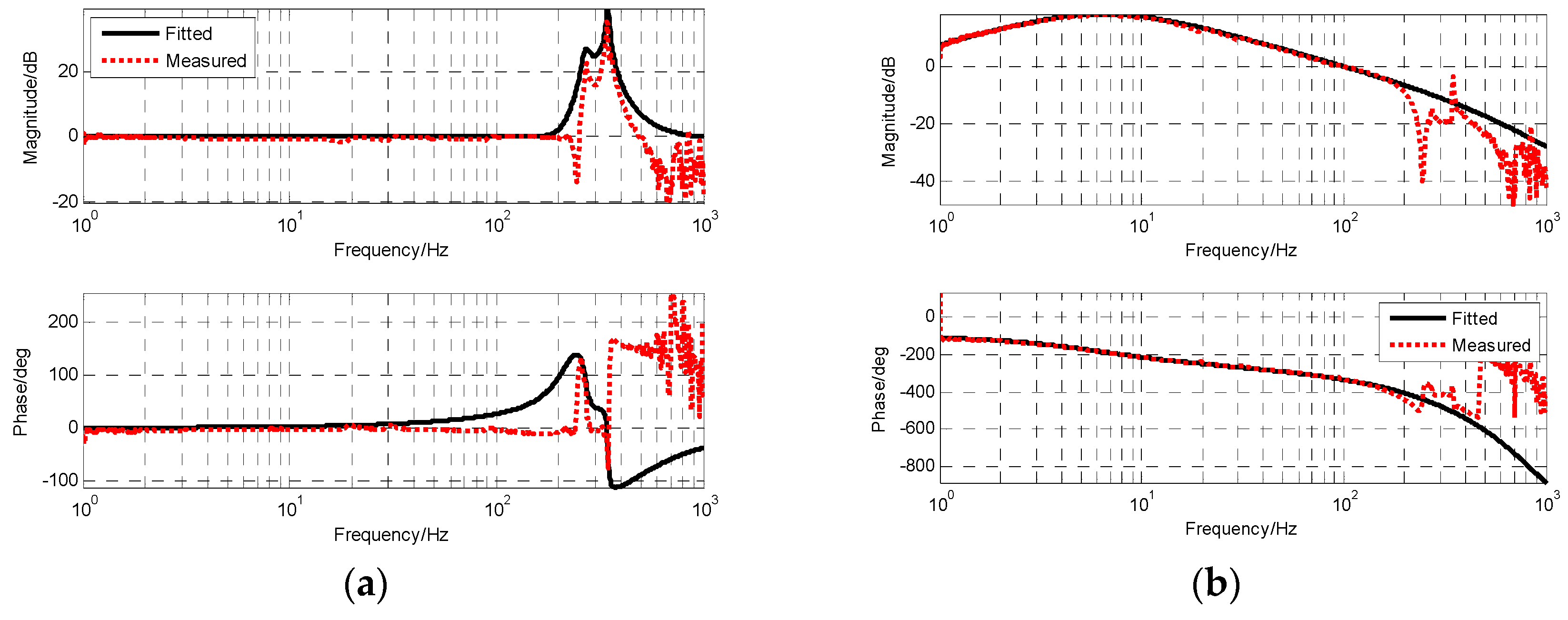
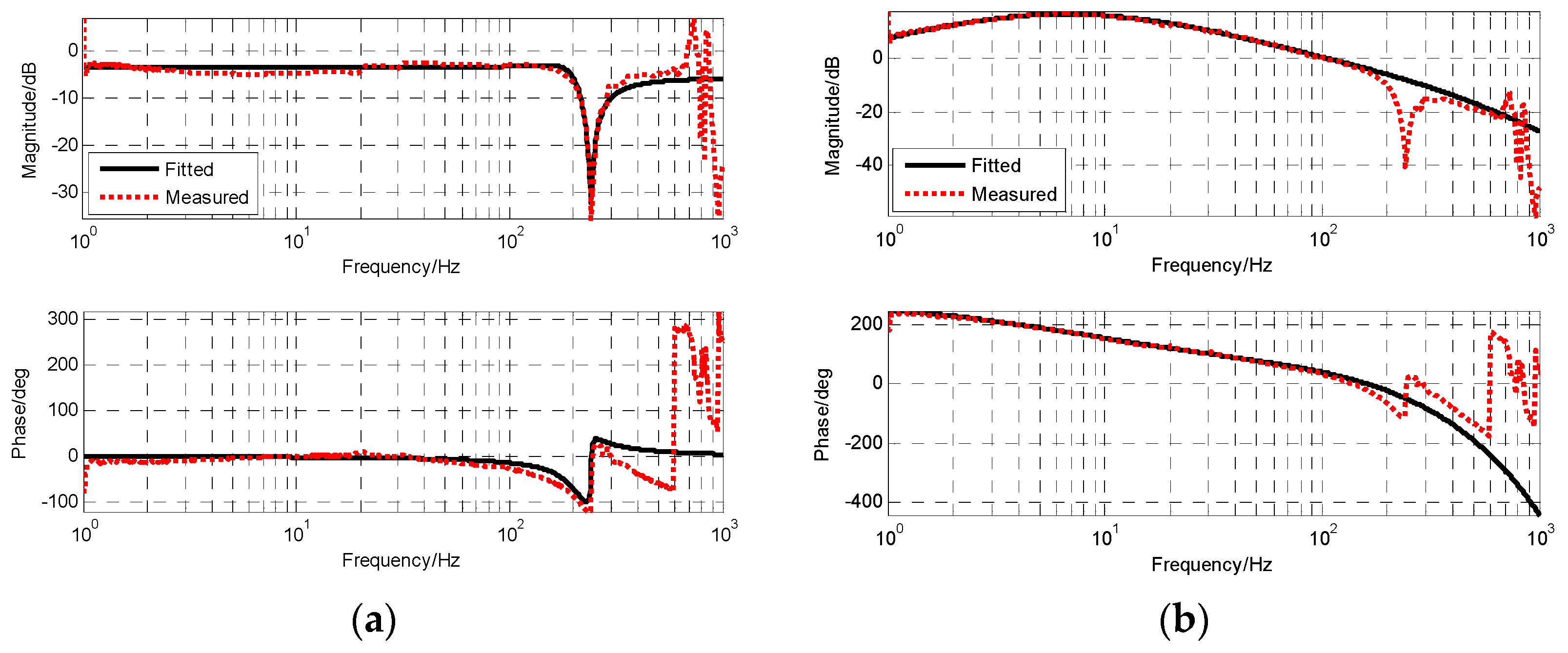
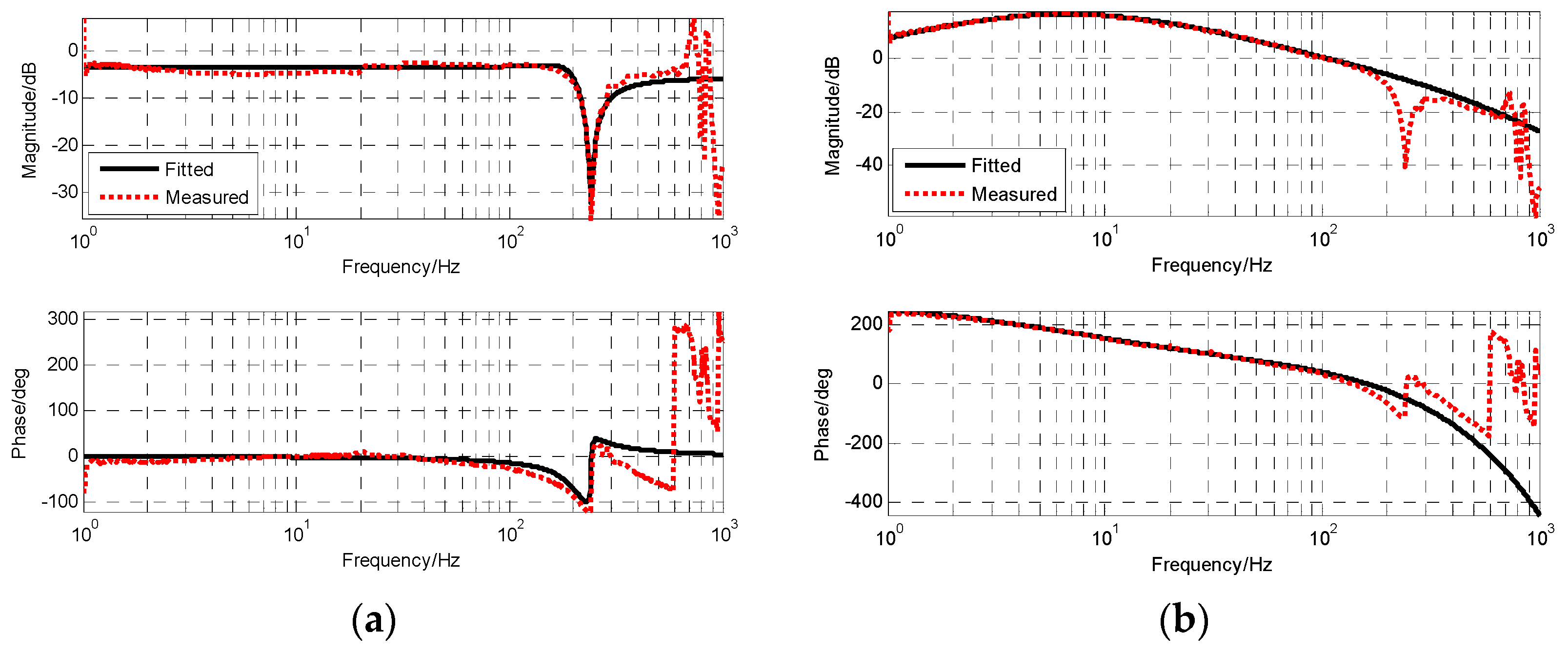
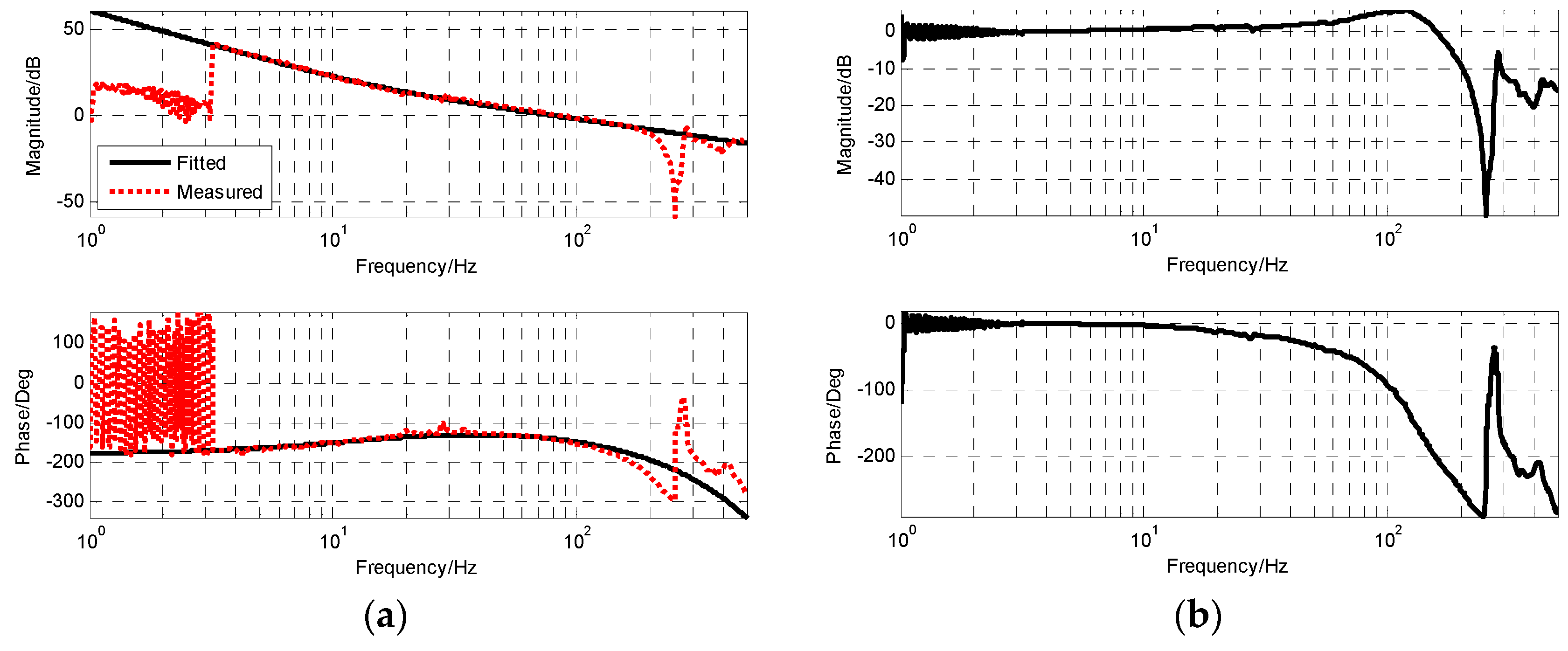
3.2. Transfer Function of MEMS Gyro and Compensation Technique
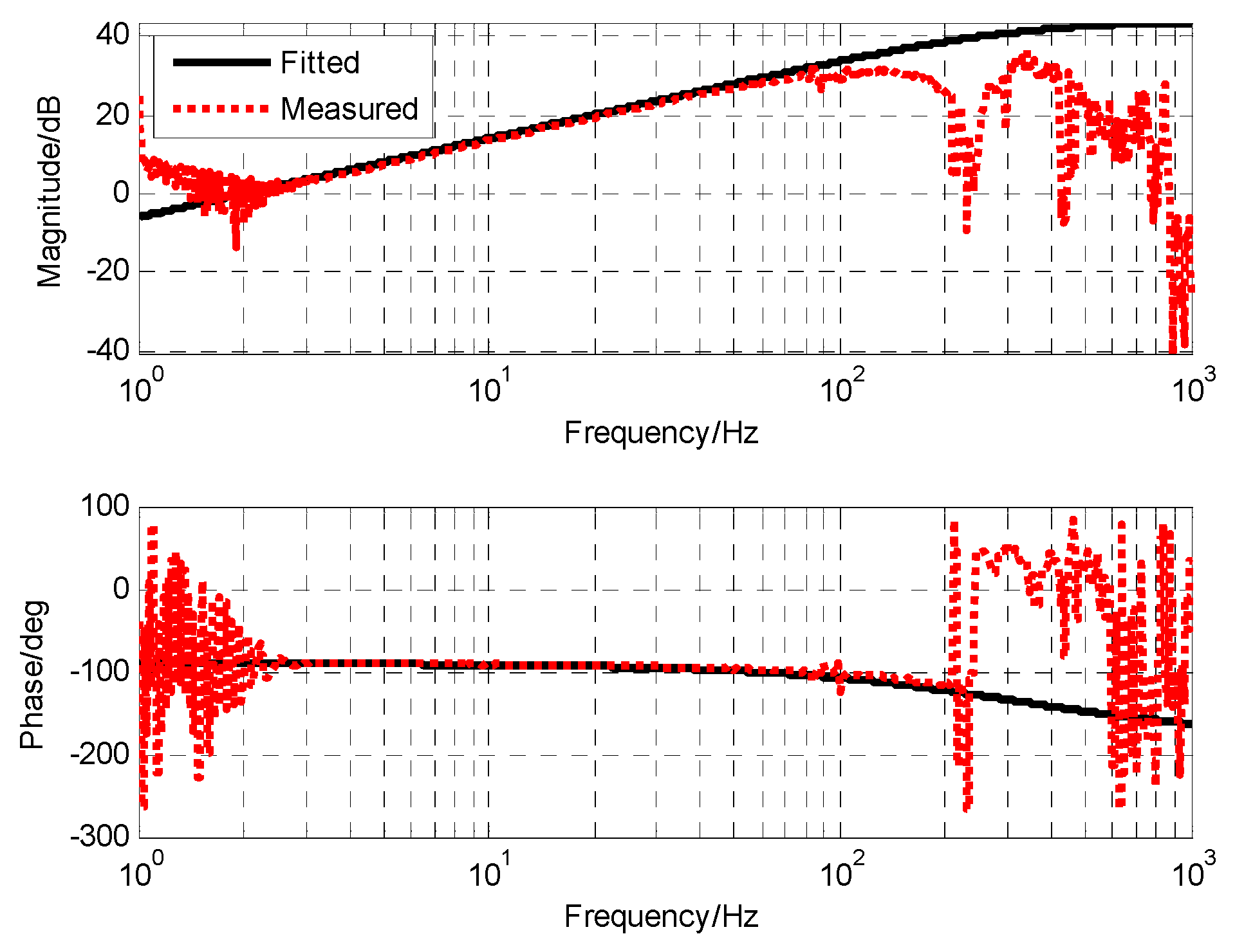
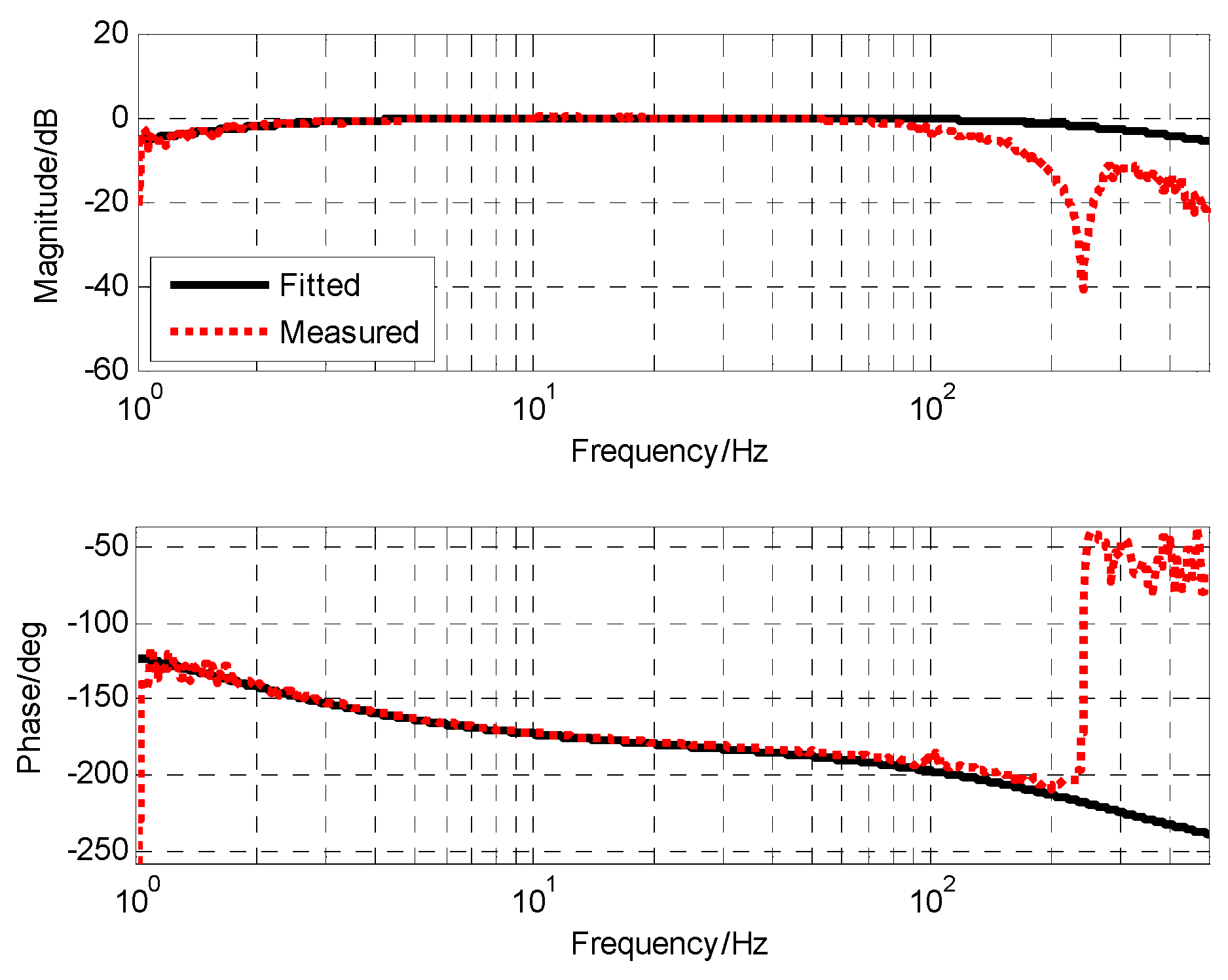
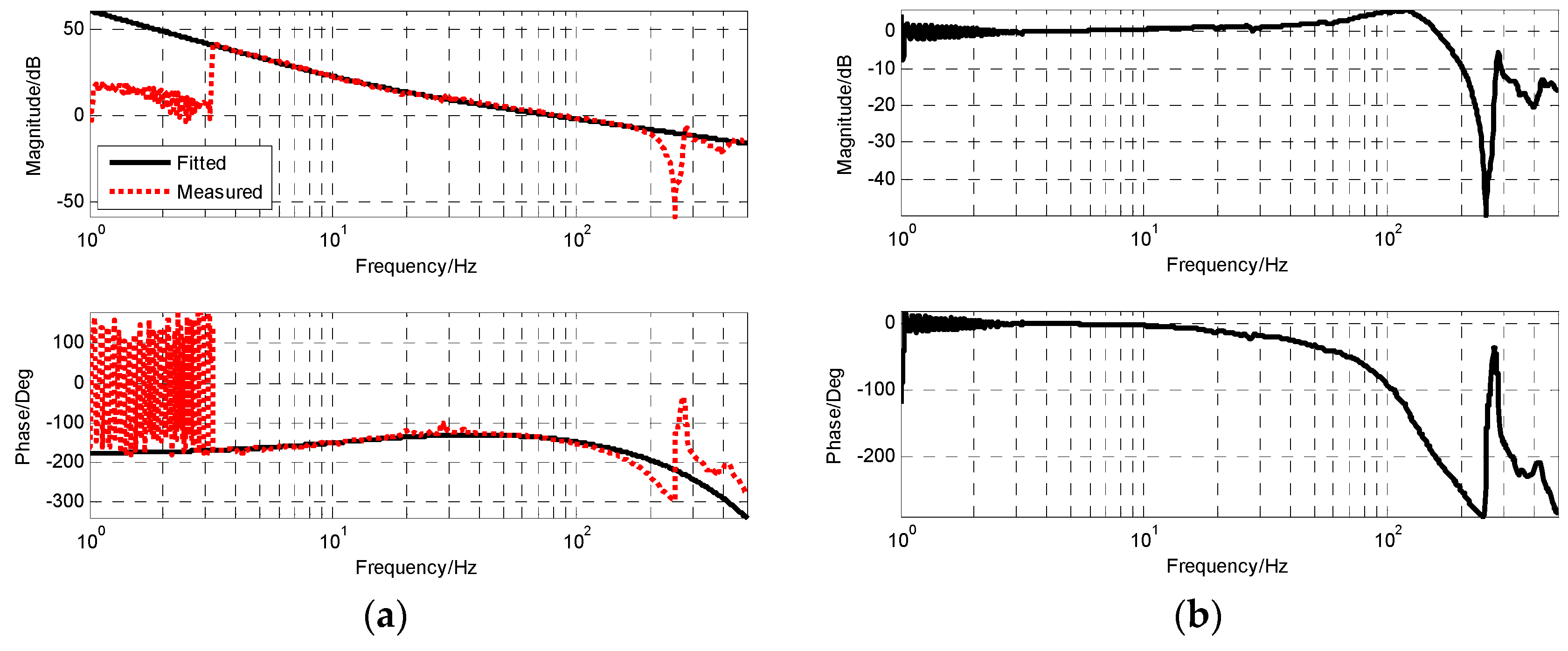
3.3. Transfer Function of MEMS Accelerometers and Compensation Technique
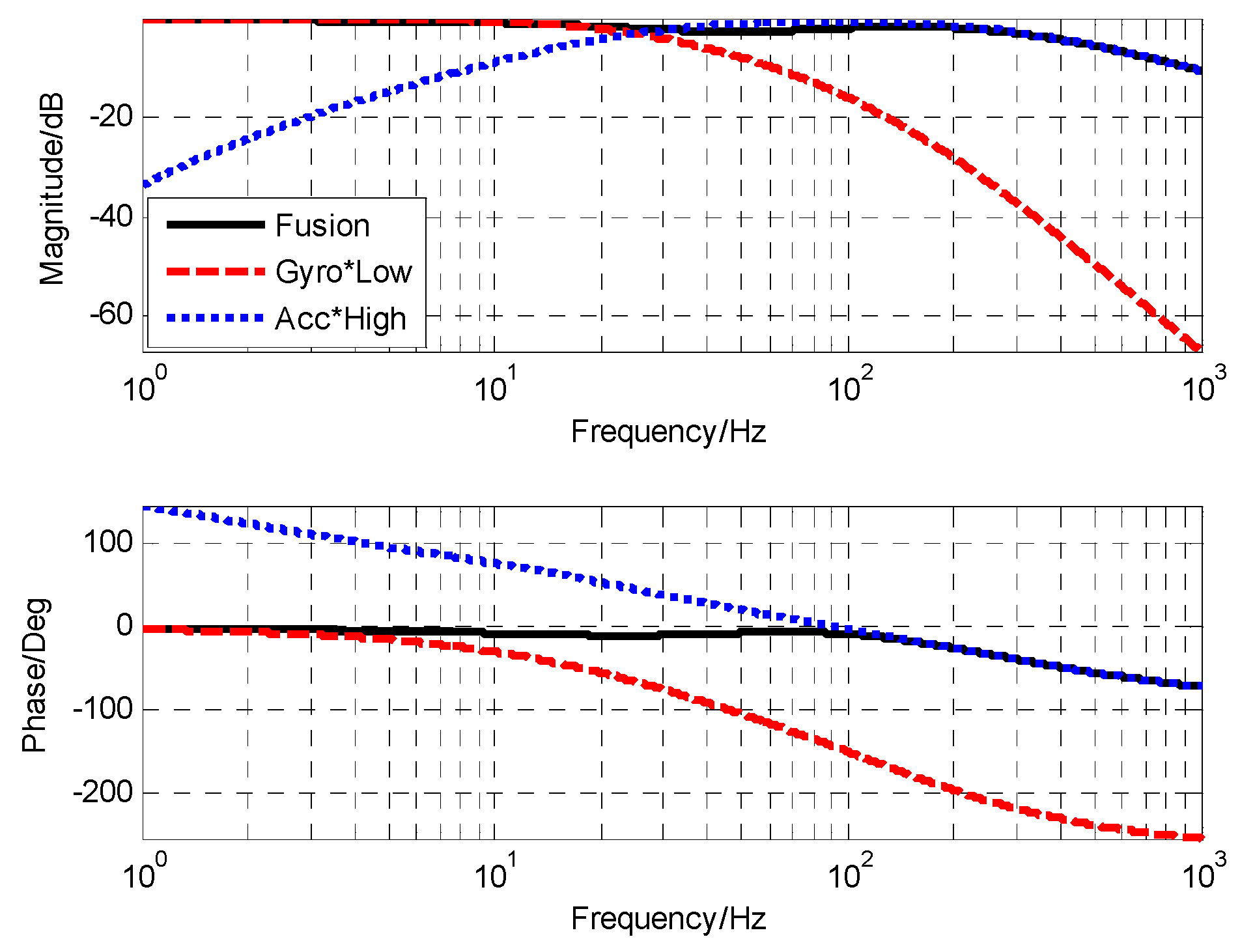
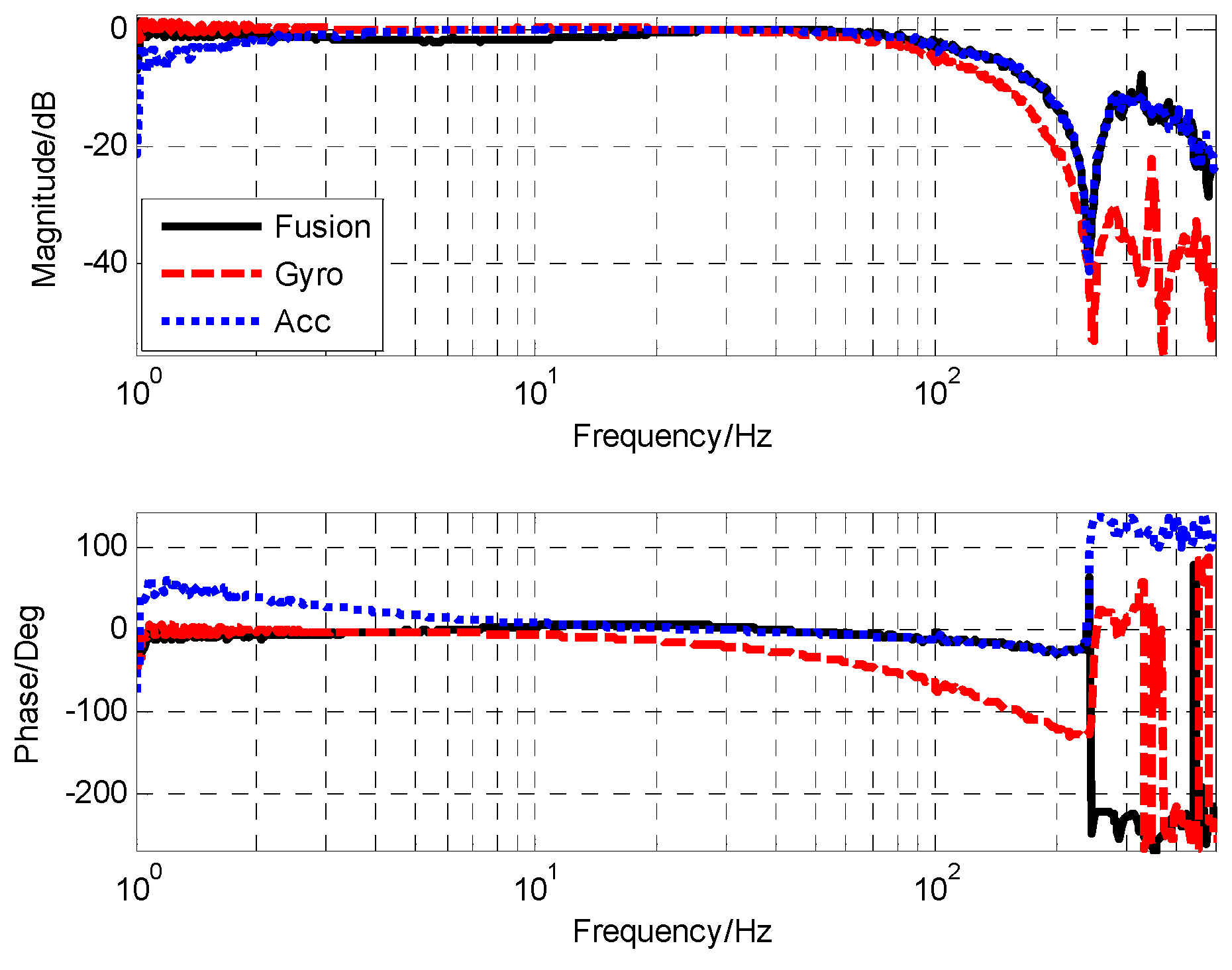
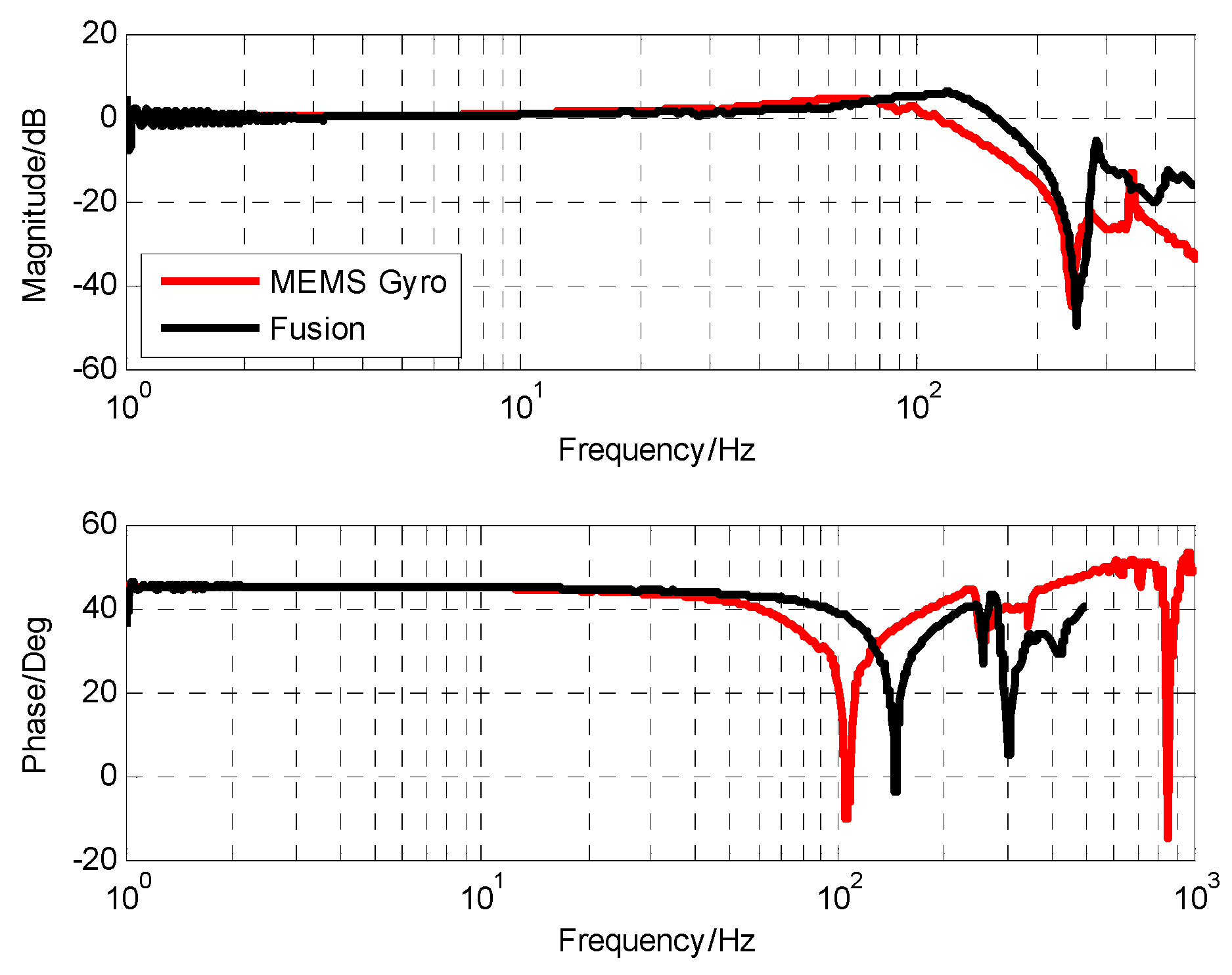
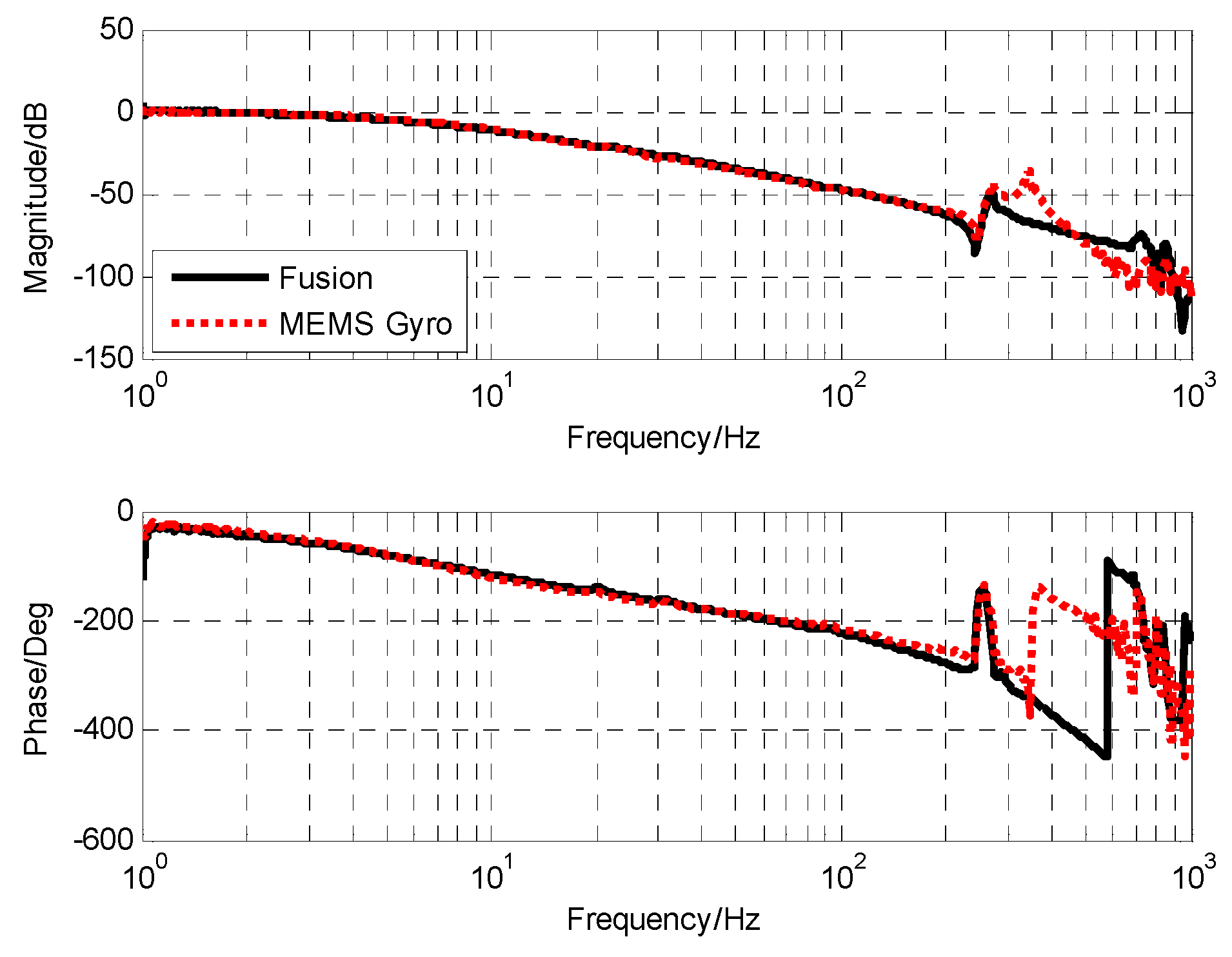
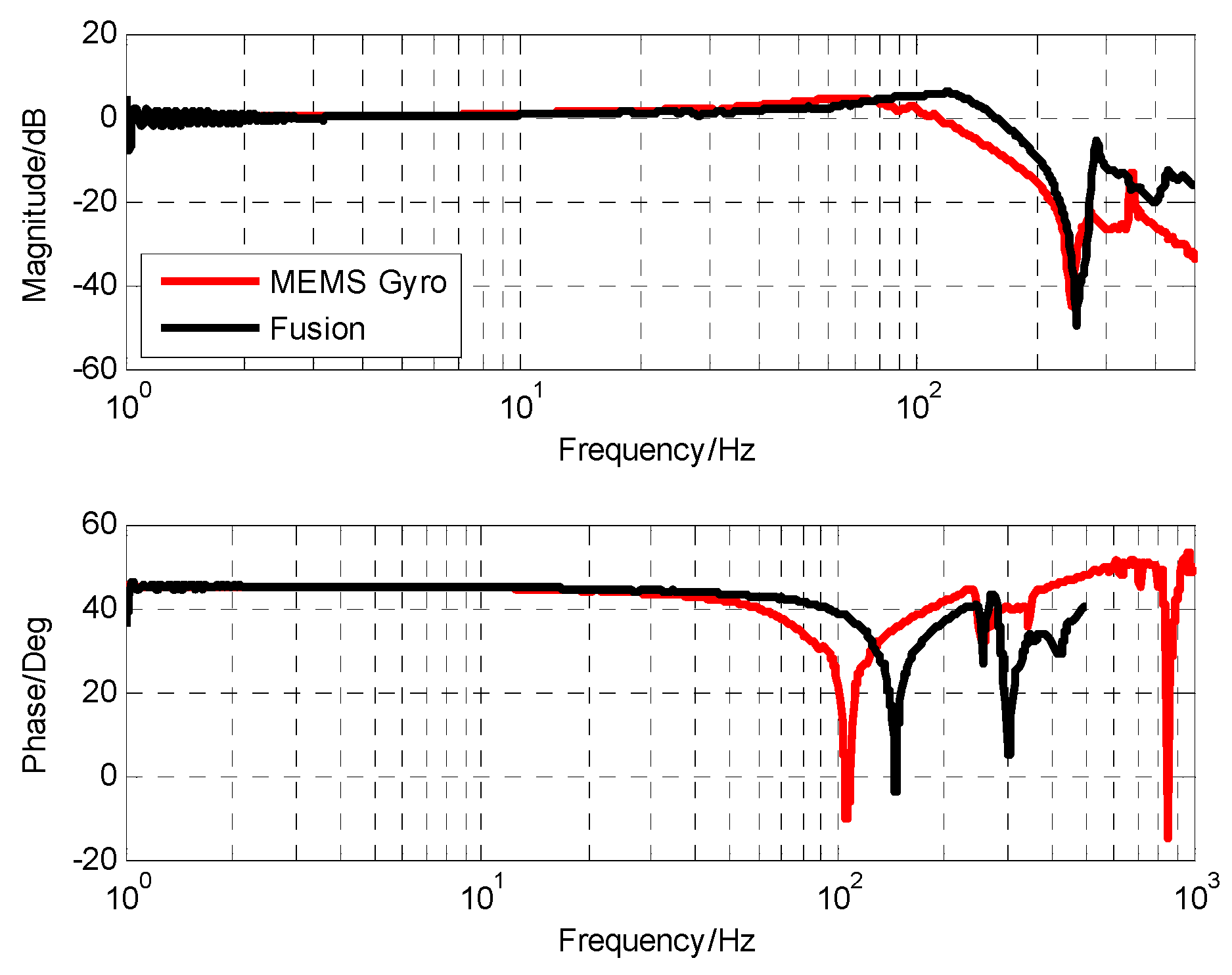
3.4. Closed-loop Fusion Experiment of MEMS Gyro and MEMS Accelerometers
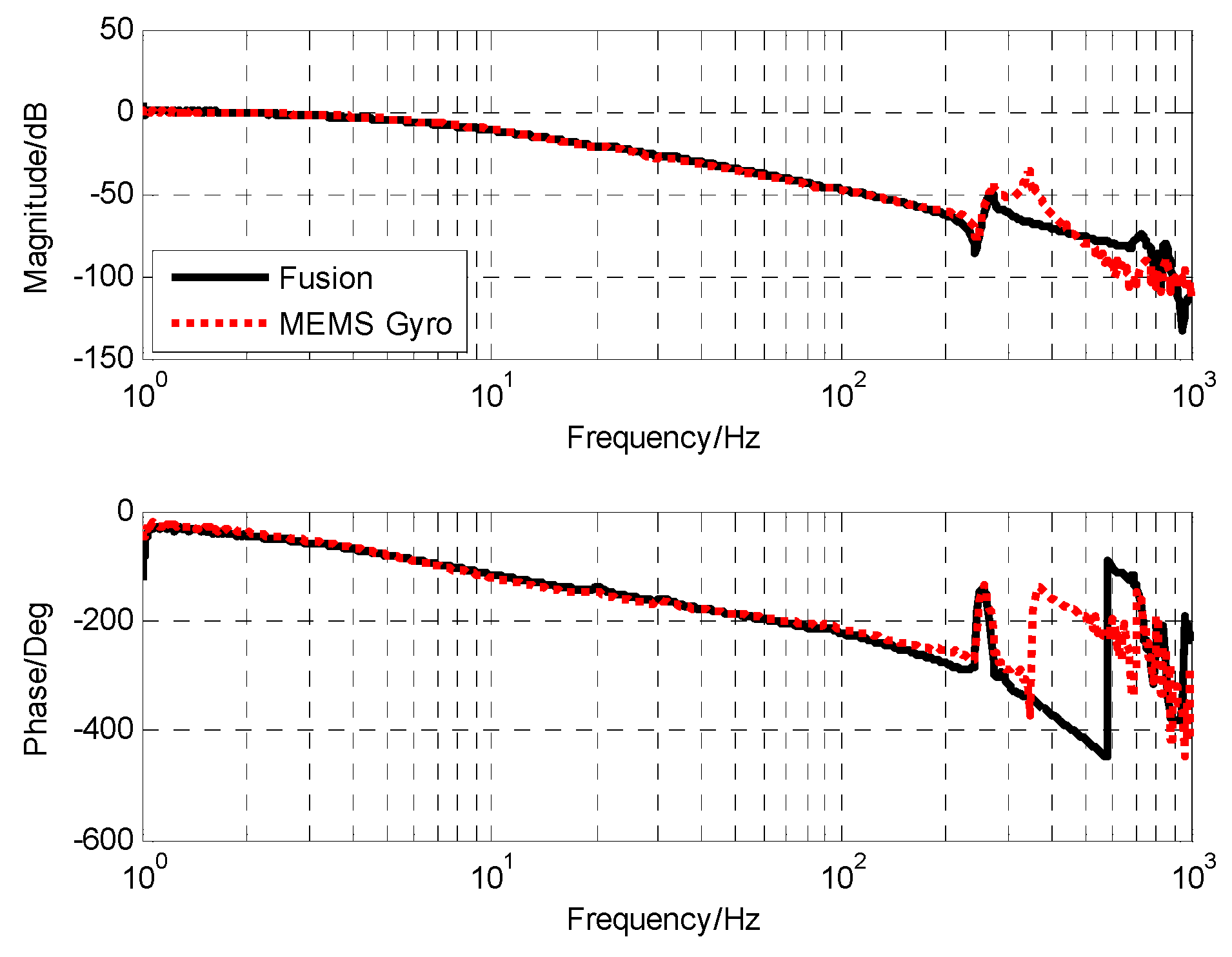
3.5. Velocity Closed-Loop Control Experiment Based on Fusion signal
- (1)
- Use the gyro to realize the inertial stability loop of the system to improve the stability of the system.
- (2)
- The position detector realizes the position tracking loop to ensure the tracking performance of the system.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Watkins, R.J.; Chen, H.J.; Agrawal, B.N.; Shin, Y.S. Optical Beam Jitter Control. In Proceedings of the SPIE 5338, Free-Space Laser Communication Technologies XVI, Bellingham, WA, USA, 16 June 2004. [Google Scholar]
- Cochran, R.W.; Vassar, R.H. Fast Steering Mirrors in Optical Control Systems. In Proceedings of the SPIE 1303, Advances in Optical Structure Systems, Orlando, FL, USA, 16–19 April 1990. [Google Scholar]
- Portillo, A.A.; Ortiz, G.G.; Racho, C. Fine pointing control for optical communications. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings (Cat. No.01TH8542), Big Sky, MT, USA, 10–17 March 2001. [Google Scholar]
- Lu, Y.F.; Fan, D.P.; Zhang, Z.Y. Theoretical and experimental determination of bandwidth for a two-axis fast steering mirror. Optik 2013, 124, 2443–2449. [Google Scholar] [CrossRef]
- Tang, T.; Huang, Y.; Liu, S. Acceleration feedback of a CCD-based tracking loop for fast steering mirror. Opt. Eng. 2009, 48, 510–520. [Google Scholar]
- Deng, C.; Tang, T.; Mao, Y.; Ren, G. Enhanced Disturbance Observer based on Acceleration Measurement for Fast Steering Mirror Systems. IEEE Photonics J. 2017, 9. [Google Scholar] [CrossRef]
- Jing, T.; Yang, W.; Peng, Z.; Tao, T.; Li, Z. Application of MEMS Accelerometers and Gyroscopes in Fast Steering Mirror Control Systems. Sensors 2016, 16, 440. [Google Scholar]
- Fortino, G.; Ghasemzadeh, H.; Gravina, R.; Liu, P.X.; Poon, C.C.; Wang, Z. Advances in Multi-Sensor Fusion for Body Sensor Networks: Algorithms, Architectures, and Applications: Guest Editorial; Elsevier: New York, NY, USA, 2018. [Google Scholar]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of nonlinear attitude estimation methods. J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Korayem, M.; Yousefzadeh, M.; Kian, S. Precise end-effector pose estimation in spatial cable-driven parallel robots with elastic cables using a data fusion method. Measurement 2018, 130, 177–190. [Google Scholar] [CrossRef]
- Ji, Y.; Xu, M.; Li, X.; Wu, T.; Tuo, W.; Wu, J.; Dong, J. Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency. Sensors 2018, 18, 1921. [Google Scholar] [CrossRef] [PubMed]
- Ji, Y.; Li, X.; Wu, T.; Chen, C. Theoretical and experimental study of radial velocity generation for extending bandwidth of magnetohydrodynamic angular rate sensor at low frequency. Sensors 2015, 15, 31606–31619. [Google Scholar] [CrossRef] [PubMed]
- Algrain, M.C.; Powers, R.M.; Woehrer, M.K. Extended-bandwidth spacecraft attitude determination using gyros and linear accelerometers. In Proceedings of the Optical Spectroscopic Techniques and Instrumentation for Atmospheric and Space Research II, San Diego, CA, USA, 30 July–2 August 2001; pp. 306–319. [Google Scholar]
- Marins, J.L.; Yun, X.; Bachmann, E.R.; McGhee, R.B.; Zyda, M.J. An extended Kalman filter for quaternion-based orientation estimation using MARG sensors. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; pp. 2003–2011. [Google Scholar]
- Odry, Á.; Fullér, R.; Rudas, I.J.; Odry, P. Kalman filter for mobile-robot attitude estimation: Novel optimized and adaptive solutions. Mech. Syst. Signal Process. 2018, 110, 569–589. [Google Scholar] [CrossRef]
- Sasiadek, J.; Hartana, P. Sensor data fusion using Kalman filter. In Proceedings of the Third International Conference on Information Fusion, 10–13 July 2000; pp. 19–25. [Google Scholar]
- Algrain, M.C. Gyroless line-of-sight stabilization for pointing and tracking systems. Opt. Eng. 1994, 33, 1255–1261. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Y.; Ren, W.; Luo, Y.; Li, Z. Optimal Design Based on Closed-Loop Fusion for Velocity Bandwidth Expansion of Optical Target Tracking System. Sensors 2019, 19, 133. https://doi.org/10.3390/s19010133
Mao Y, Ren W, Luo Y, Li Z. Optimal Design Based on Closed-Loop Fusion for Velocity Bandwidth Expansion of Optical Target Tracking System. Sensors. 2019; 19(1):133. https://doi.org/10.3390/s19010133
Chicago/Turabian StyleMao, Yao, Wei Ren, Yong Luo, and Zhijun Li. 2019. "Optimal Design Based on Closed-Loop Fusion for Velocity Bandwidth Expansion of Optical Target Tracking System" Sensors 19, no. 1: 133. https://doi.org/10.3390/s19010133
APA StyleMao, Y., Ren, W., Luo, Y., & Li, Z. (2019). Optimal Design Based on Closed-Loop Fusion for Velocity Bandwidth Expansion of Optical Target Tracking System. Sensors, 19(1), 133. https://doi.org/10.3390/s19010133