A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
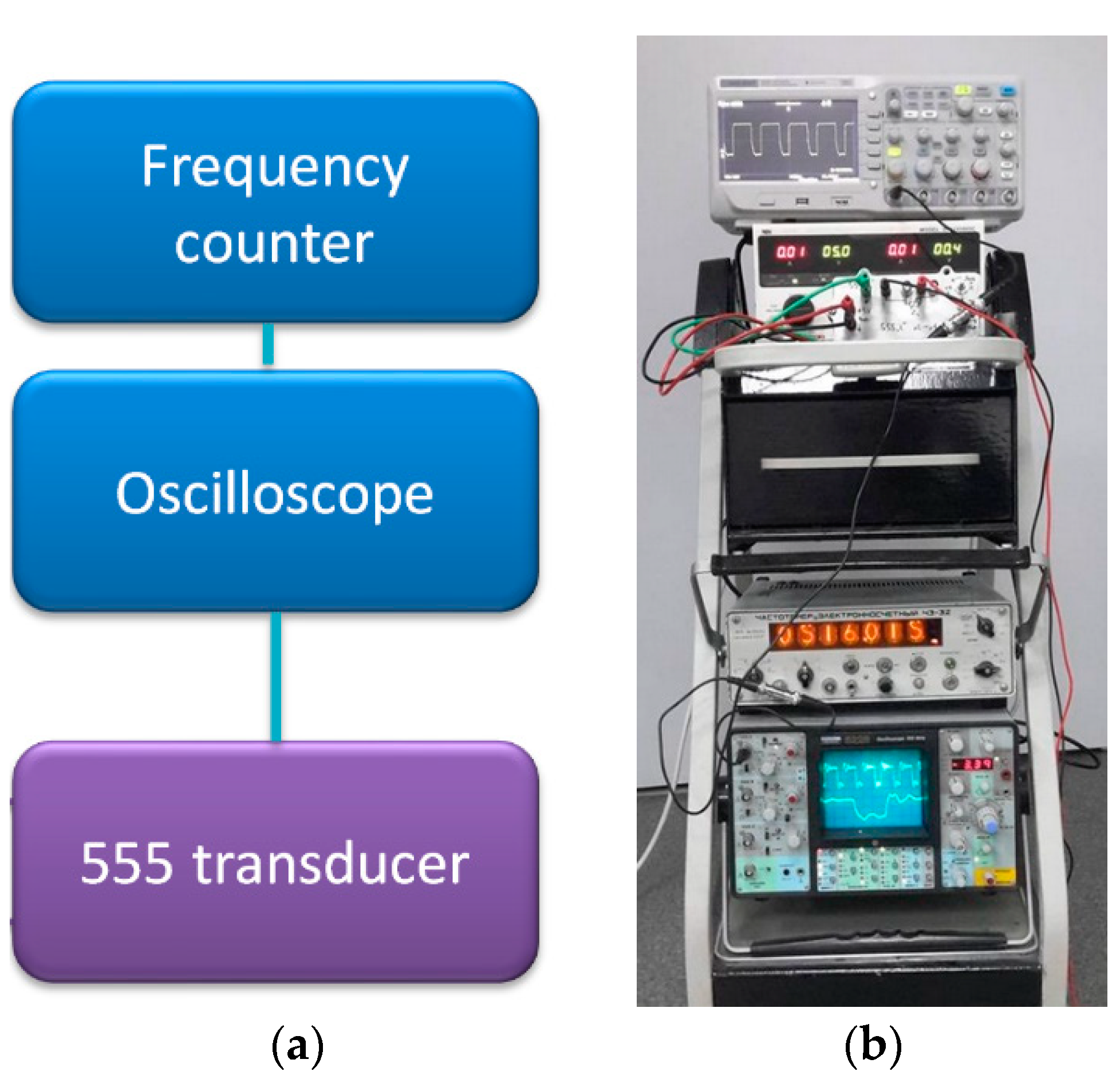
2. Materials and Methods
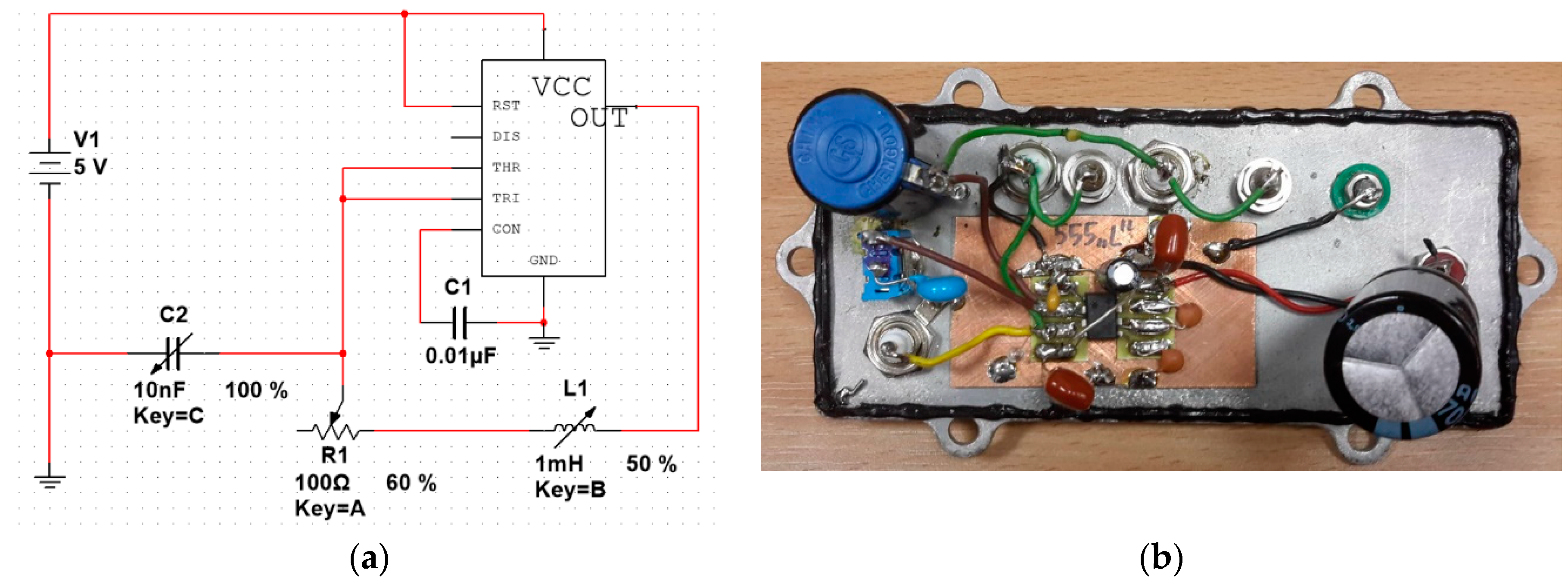
2.1. New Transducer
2.2. Exemplary Sensors
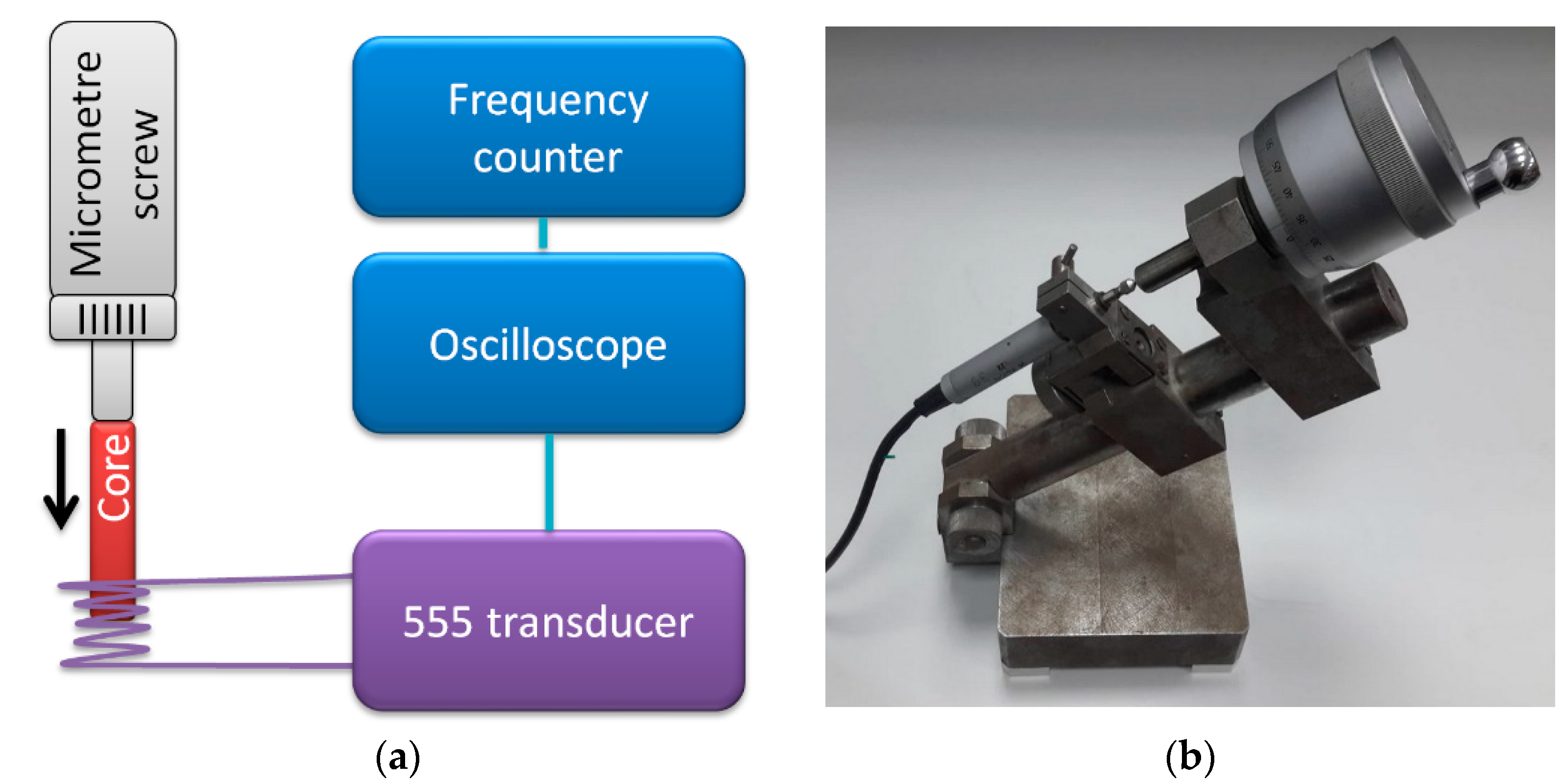
2.2.1. Inductive Displacement Sensor
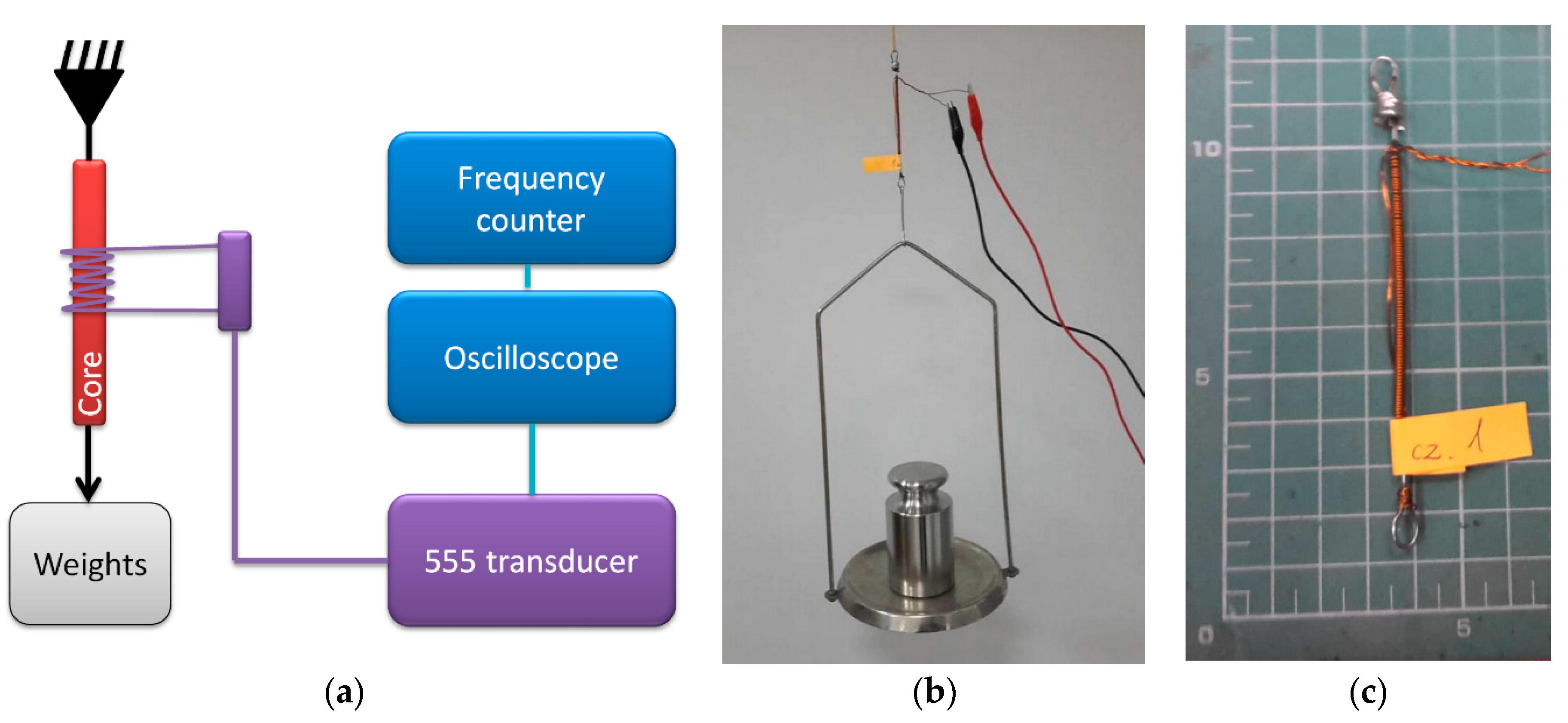
2.2.2. Magnetoelastic Force Sensor
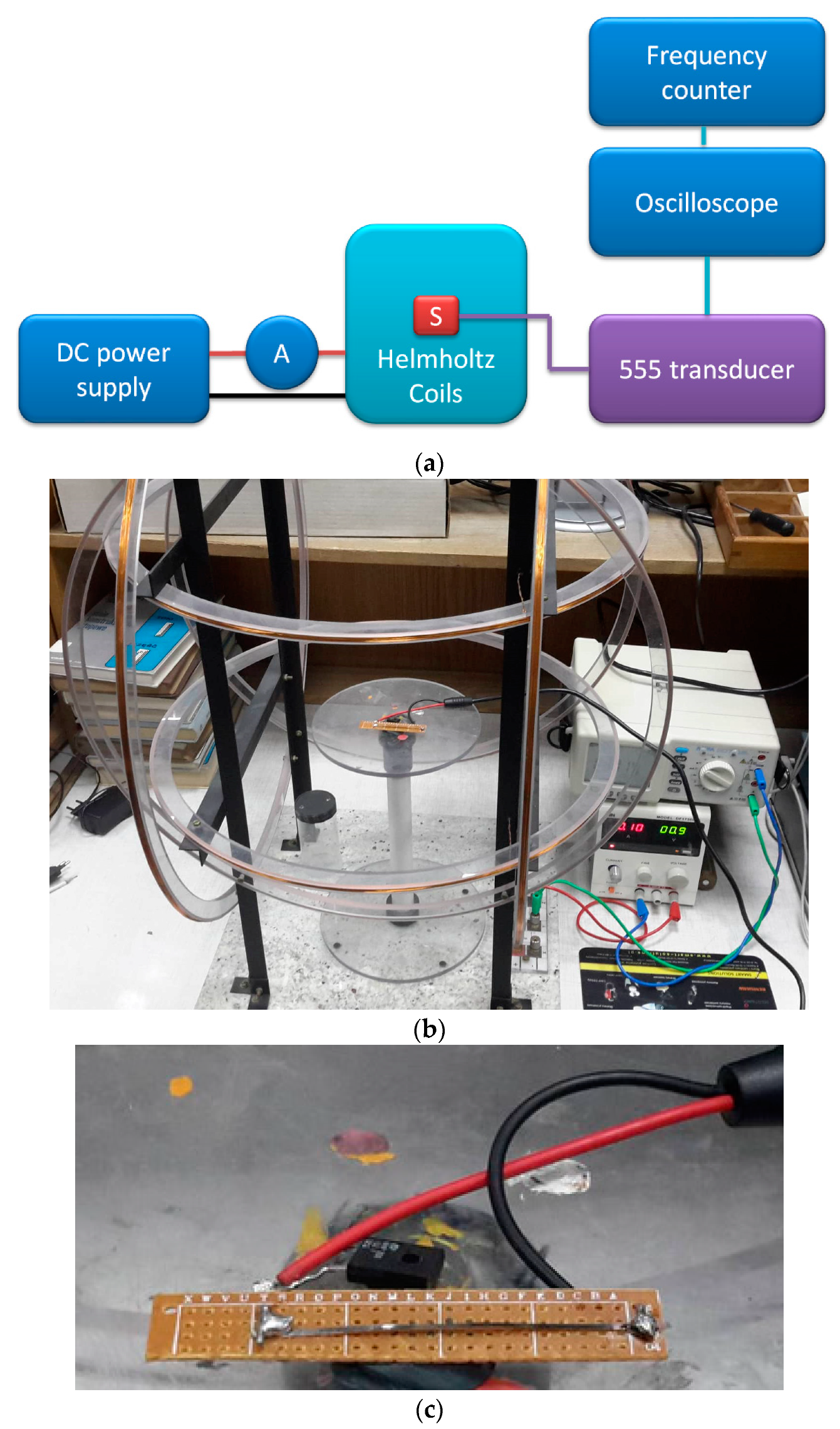
2.2.3. GMI Magnetic Field Sensor
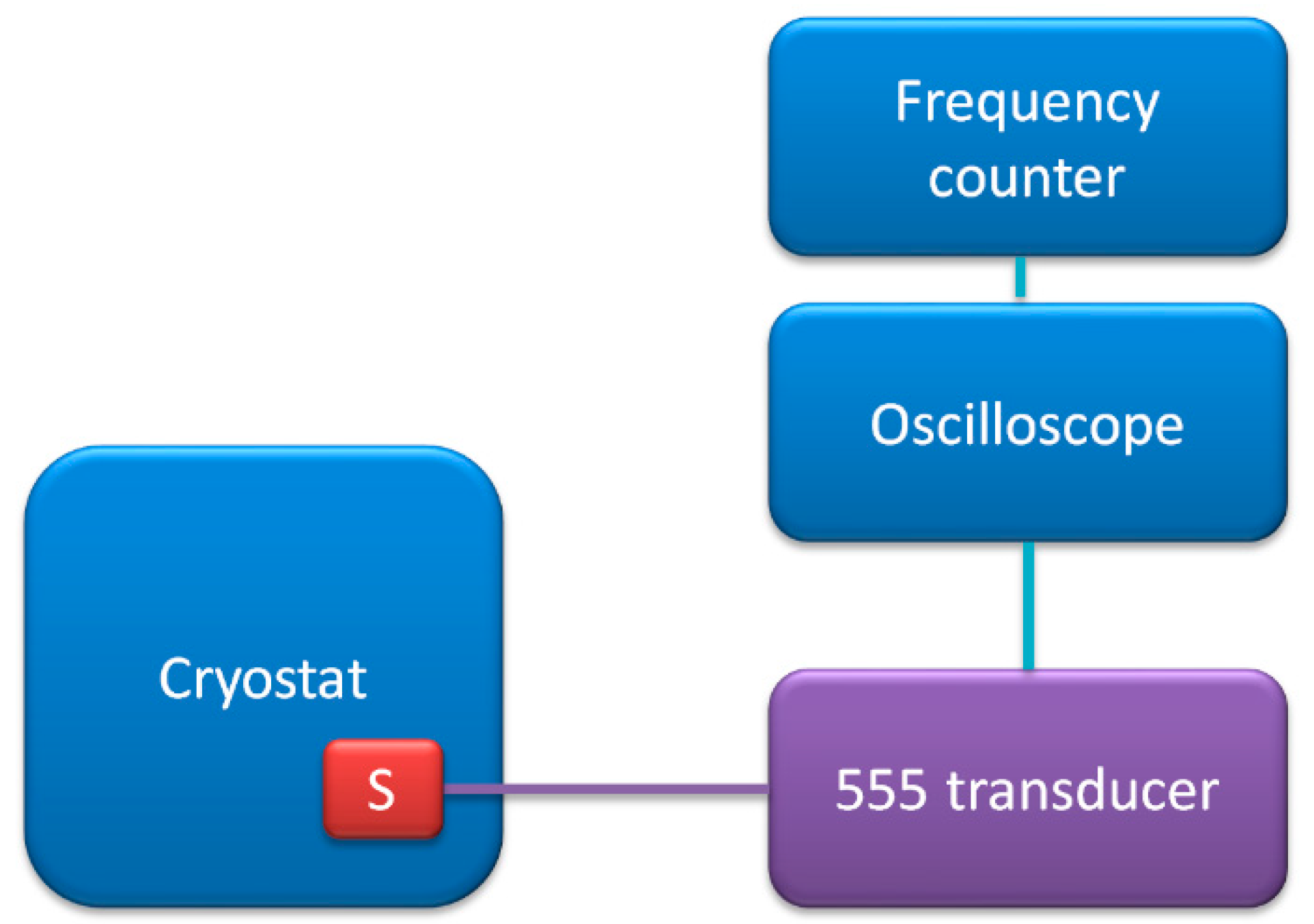
2.2.4. Resistive Temperature Sensors
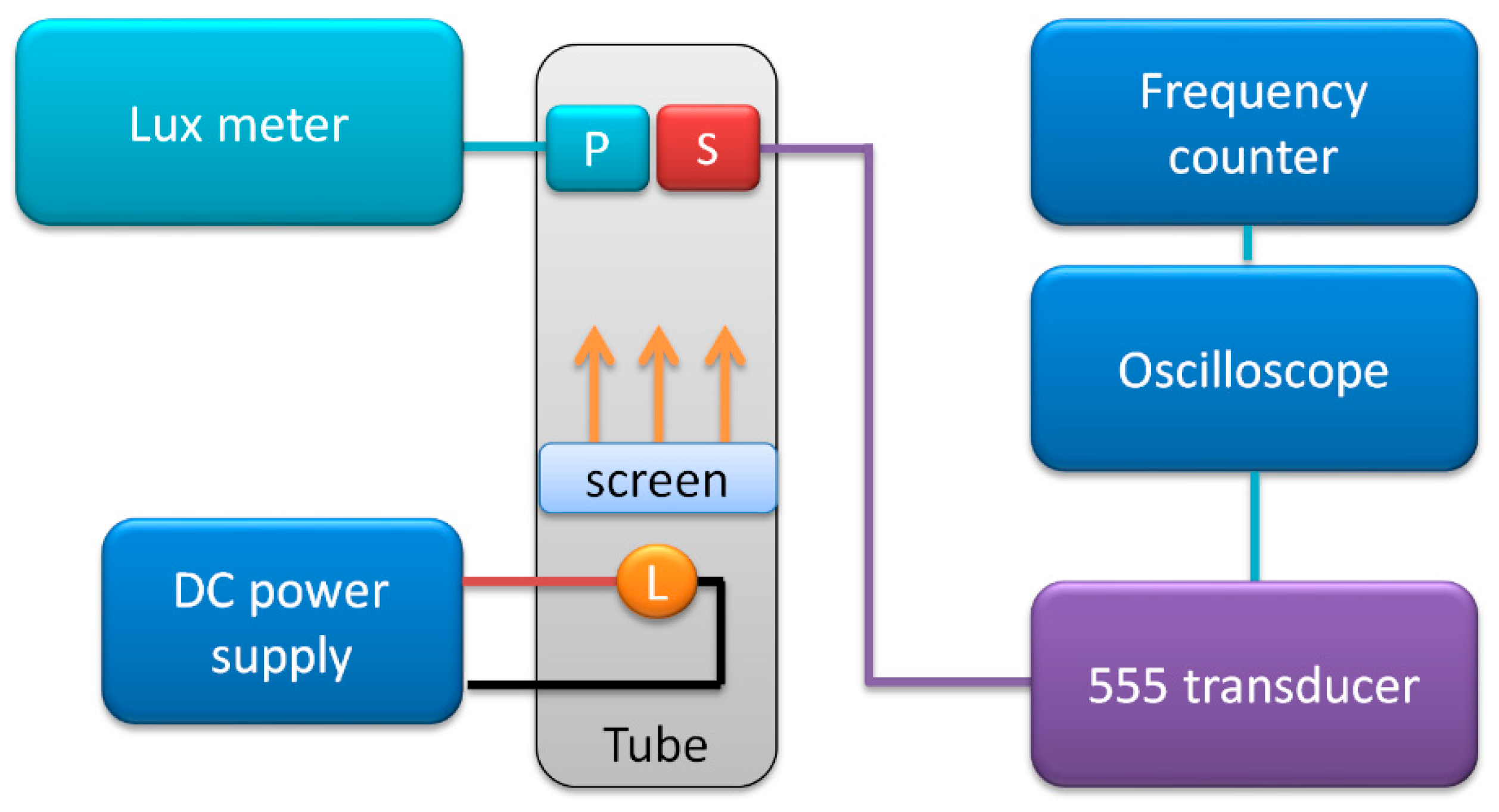
2.2.5. Resistive Light Sensors
3. Results
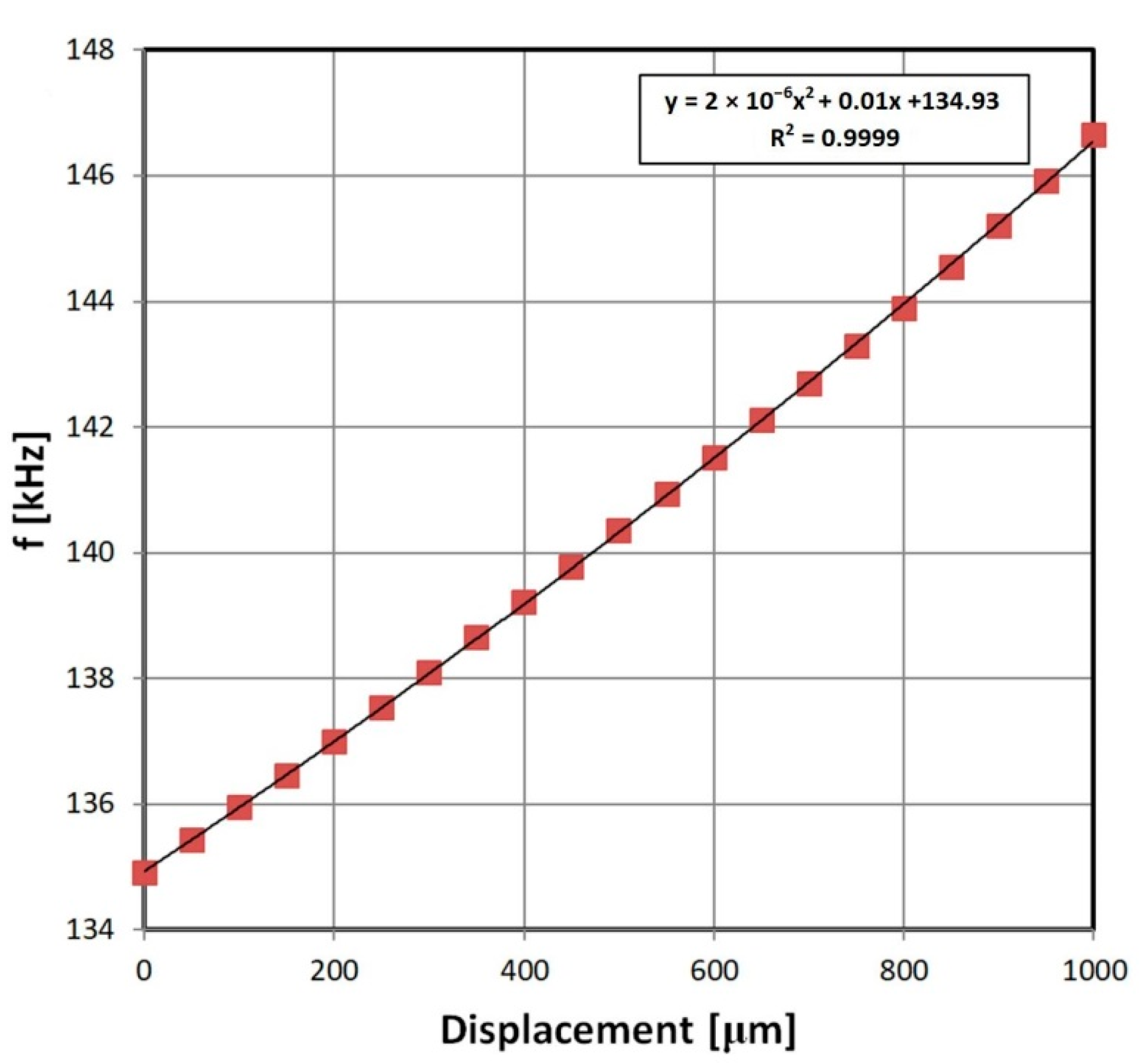
3.1. Inductive Displacement Sensor Characteristic
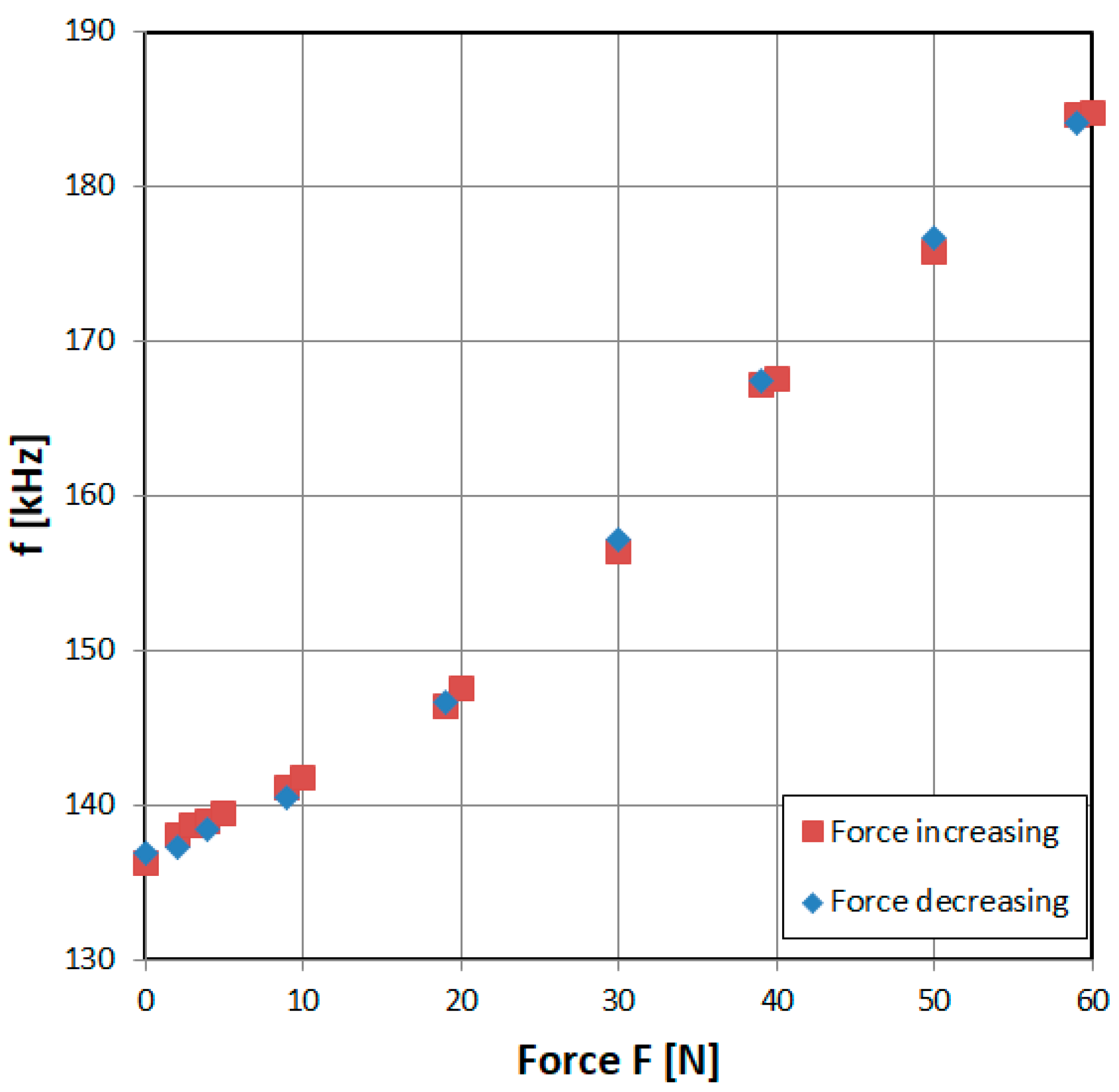
3.2. Magnetoelastic Force Sensor Characteristic
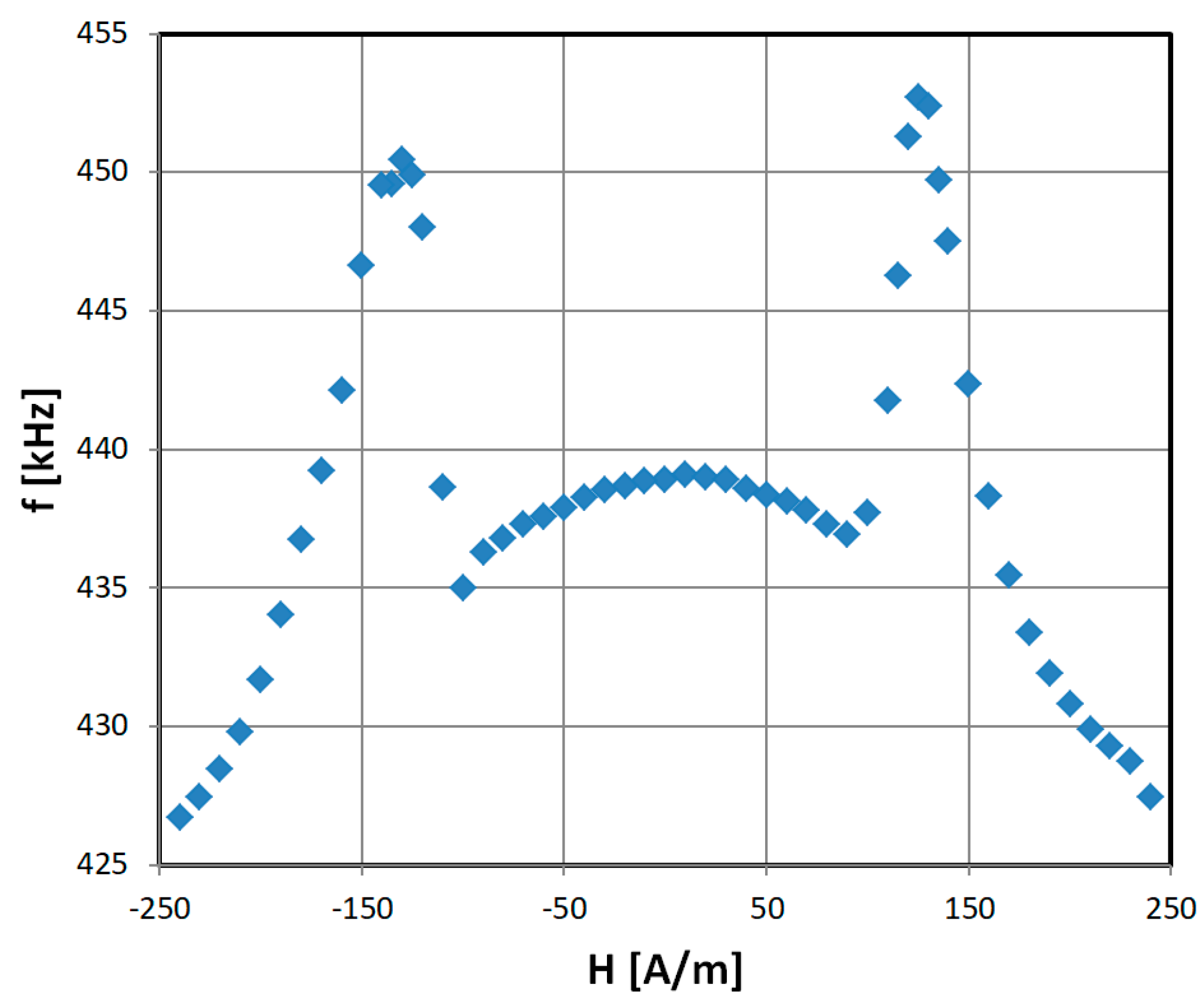
3.3. GMI Magnetic Field Sensor Characteristic
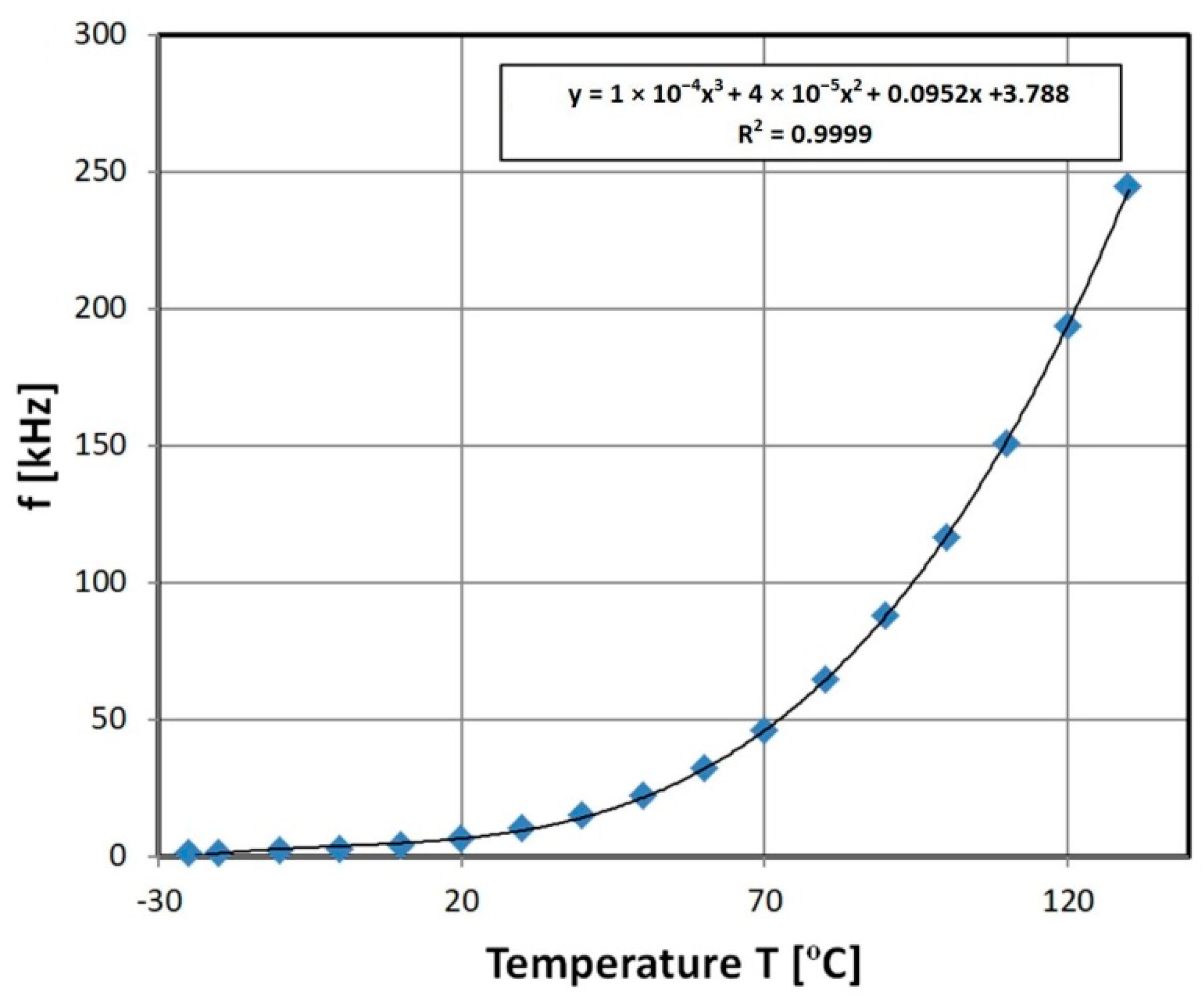
3.4. Resistive Temperature Field Sensor Characteristic
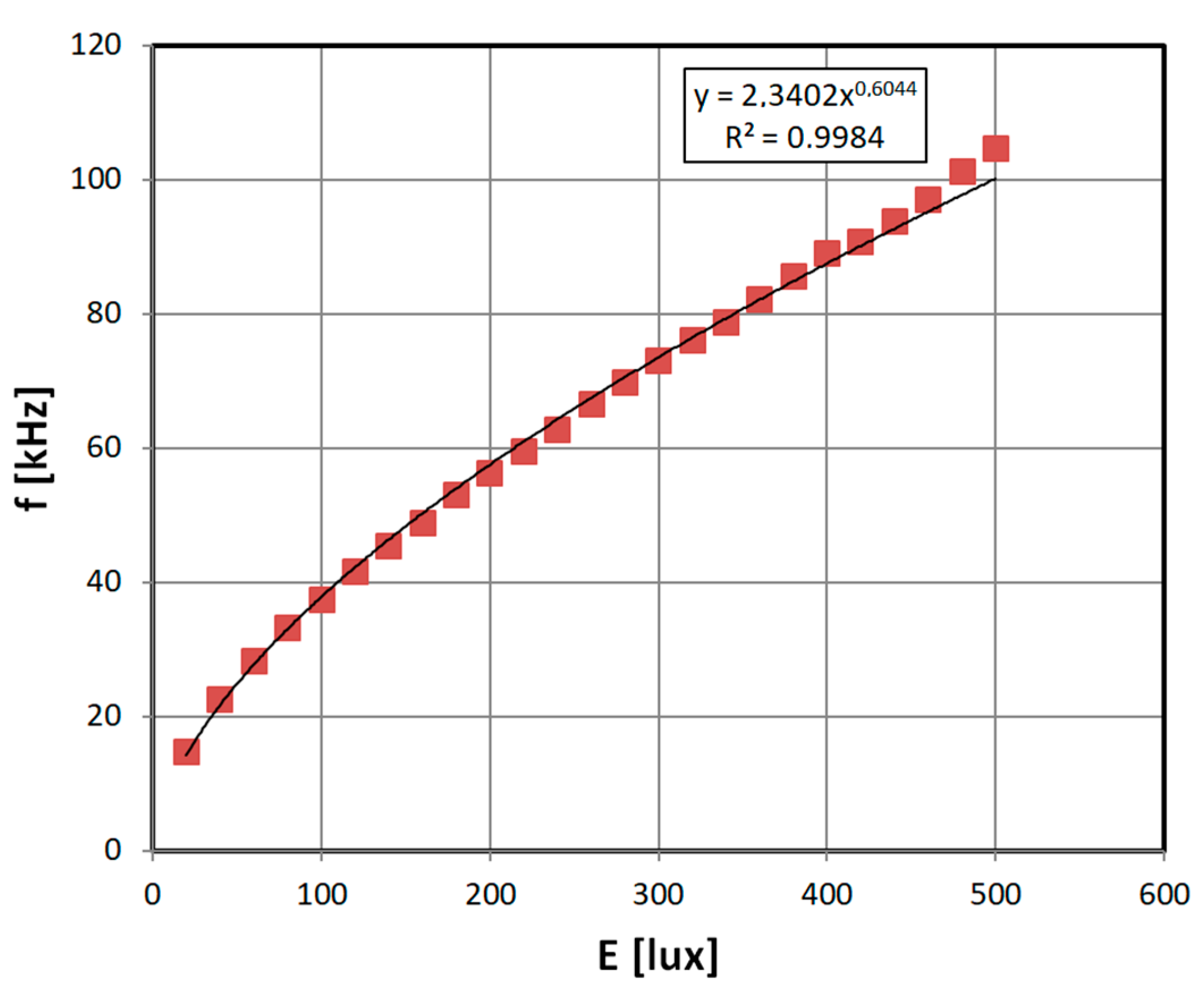
3.5. Resistive Light Sensors Characteristic
4. Conclusions
Funding
Conflicts of Interest
References
- Zhukova, V.; Ipatov, M.; Zhukov, A. Thin Magnetically Soft Wires for Magnetic Microsensors. Sensors 2009, 9, 9216–9240. [Google Scholar] [CrossRef] [PubMed]
- Singh, A.T.; Lantigua, D.; Meka, A.; Taing, S.; Pandher, M.; Camci-Unal, G. Paper-Based Sensors: Emerging Themes and Applications. Sensors 2018, 18, 2838. [Google Scholar] [CrossRef] [PubMed]
- Moos, R.; Izu, N.; Rettig, F.; Reiß, S.; Shin, W.; Matsubara, I. Resistive Oxygen Gas Sensors for Harsh Environments. Sensors 2011, 11, 3439–3465. [Google Scholar] [CrossRef] [PubMed]
- Farahani, H.; Wagiran, R.; Hamidon, M.N. Humidity Sensors Principle, Mechanism, and Fabrication Technologies: A Comprehensive Review. Sensors 2014, 14, 7881–7939. [Google Scholar] [CrossRef] [PubMed]
- Grimes, C.A.; Kouzoudis, D. Remote query measurement of pressure, fluid-flow velocity, and humidity using magnetoelastic thick-film sensors. Sens. Actuators A Phys. 2000, 84, 205–212. [Google Scholar] [CrossRef]
- Faludi, R. Building Wireless Sensor Networks: With ZigBee, XBee, Arduino, and Processing; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2010; ISBN 1449302742. [Google Scholar]
- Bieńkowski, A.; Szewczyk, R.; Salach, J. Industrial application of magnetoelastic force and torque sensors. Acta Phys. Pol. A 2010, 118, 1008–1009. [Google Scholar] [CrossRef]
- Stefanescu, D.M. Handbook of Force Transducers: Principles and Components; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; ISBN 3642182968. [Google Scholar]
- Dahle, O. The pressductor and the torductor—Two heavy-duty transducers based on magnetic stress sensitivity. IEEE Trans. Commun. Electron. 1964, 83, 752–758. [Google Scholar] [CrossRef]
- Flynn, F.P. Pressductor. Stud. Q. J. 1966, 36, 125. [Google Scholar] [CrossRef]
- Bieńkowski, A.; Szewczyk, R. The possibility of utilizing the high permeability magnetic materials in construction of magnetoelastic stress and force sensors. Sens. Actuators A Phys. 2004, 113, 270–276. [Google Scholar] [CrossRef]
- Ferenc, J.; Kowalczyk, M.; Cieslak, G.; Kulik, T. Magnetostrictive iron-based bulk metallic glasses for force sensors. IEEE Trans. Magn. 2015, 50, 1–3. [Google Scholar] [CrossRef]
- Moran, T.J.; Ursetta, F. Magnetoelastic Sensor. U.S. Patent Application No. US20150204737A1, 23 July 2015. [Google Scholar]
- Hauser, M.; Kraus, L.; Ripka, P. Giant magnetoimpedance sensors. IEEE Instrum. Meas. Mag. 2001, 4, 28–32. [Google Scholar] [CrossRef]
- Harrison, E.P.; Rowe, H. An impedance magnetometer. Proc. Phys. Soc. 1938, 50, 176. [Google Scholar] [CrossRef]
- Turney, G.L.; Cousins, G.E. A portable direct-reading magnetometer. J. Sci. Instrum. 1938, 15, 360. [Google Scholar] [CrossRef]
- Knobel, M.; Pirota, K.R. Giant magnetoimpedance: Concepts and recent progress. J. Magn. Magn. Mater. 2002, 242, 33–40. [Google Scholar] [CrossRef]
- Shen, L.P.; Uchiyama, T.; Mohri, K.; Kita, E.; Bushida, K. Sensitive stress-impedance micro sensor using amorphous magnetostrictive wire. IEEE Trans. Magn. 1997, 33, 3355–3357. [Google Scholar] [CrossRef]
- Beato-López, J.J.; Vargas-Silva, G.; Pérez-Landazábal, J.I.; Gómez-Polo, C. Giant stress-impedance (GSI) sensor for diameter evaluation in cylindrical elements. Sens. Actuators A Phys. 2018, 269, 269–275. [Google Scholar] [CrossRef]
- Nematov, M.G.; Salem, M.M.; Adam, A.; Ahmed, M.; Panina, L.V.; Morchenko, A.T. Effect of stress on magnetic properties of annealed glass-coated Co 71 Fe 5 B 11 Si 10 Cr 3 amorphous microwires. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017. [Google Scholar]
- Kornrumpf, W.P.; Alley, R.P. Operating Circuit for Magnetoelastic Force/Pressure Sensors. U.S. Patent No. 4,541,288, 17 September 1985. [Google Scholar]
- The Colpitts Oscillator. Available online: https://www.electronics-tutorials.ws/oscillator/colpitts.html (accessed on 3 November 2018).
- Matko, V.; Jezernik, K. Greatly Improved Small Inductance Measurement Using Quartz Crystal Parasitic Capacitance Compensation. Sensors 2010, 10, 3954–3960. [Google Scholar] [CrossRef]
- Matko, V. Next Generation AT-Cut Quartz Crystal Sensing Devices. Sensors 2011, 11, 4474–4482. [Google Scholar] [CrossRef]
- Wang, M.L.; Chen, Z.L.; Koontz, S.S.; Lloyd, G.M. Magnetoelastic permeability measurement for stress monitoring in steel tendons and cables. Proc. SPIE 2000, 3995, 492–501. [Google Scholar]
- Jackiewicz, D.; Juś, A.; Szewczyk, R.; Bieńkowski, A. Two methods of magnetoelastic effect utilization to evaluate mechanical strain in the truss structures. Przegląd Elektrotechniczny 2017, 93, 31–33. [Google Scholar] [CrossRef]
- Bozic, M.; Vujičić, V.; Sucurovic, M.; Koprivica, B. Simple magnetomechanical torque sensor—Design, construction and testing. In Proceedings of the International Scientific Conference UNITECH 2017, Gabrovo, Bulgaria, 17–18 November 2017. [Google Scholar]
- Bieńkowski, A.; Szewczyk, R. New possibility of utilizing amorphous ring cores as stress sensor. Phys. Status Solidi A 2002, 189, 787–790. [Google Scholar] [CrossRef]
- Phan, M.H.; Peng, H.X. Giant magnetoimpedance materials: Fundamentals and applications. Prog. Mater. Sci. 2008, 53, 323–420. [Google Scholar] [CrossRef]
- Nosenko, V.K.; Maslov, V.V.; Kirilchuk, V.V.; Kochkubey, A.P. Some industrial applications of amorphous and nanocrystalline alloys. J. Phys. Conf. Ser. 2008, 7, 1–6. [Google Scholar] [CrossRef]
- Cole, K.S. Thermistor thermometer bridge: Linearity and sensitivity for a range of temperature. Rev. Sci. Instrum. 1957, 28, 326–328. [Google Scholar] [CrossRef]
- Kraus, L.; Švec, P. Magnetoelastic hysteresis of amorphous ribbons. J. Appl. Phys. 2003, 93, 7220–7222. [Google Scholar] [CrossRef]
- Davino, D.; Visone, C.; Ambrosino, C.; Campopiano, S.; Cusano, A.; Cutolo, A. Compensation of hysteresis in magnetic field sensors employing Fiber Bragg Grating and magneto-elastic materials. Sens. Actuators A Phys. 2008, 147, 127–136. [Google Scholar] [CrossRef]
- Jackiewicz, D.; Szewczyk, R.; Salach, J. Modelling the Magnetic Characteristics and Temperature Influence on Construction Steels. Solid State Phenom. 2013, 199, 466–471. [Google Scholar] [CrossRef]
- Kraus, L. GMI modeling and material optimization. Sens. Actuators A Phys. 2003, 106, 187–194. [Google Scholar] [CrossRef]













© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowicki, M. A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications. Sensors 2019, 19, 121. https://doi.org/10.3390/s19010121
Nowicki M. A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications. Sensors. 2019; 19(1):121. https://doi.org/10.3390/s19010121
Chicago/Turabian StyleNowicki, Michał. 2019. "A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications" Sensors 19, no. 1: 121. https://doi.org/10.3390/s19010121
APA StyleNowicki, M. (2019). A Modified Impedance-Frequency Converter for Inexpensive Inductive and Resistive Sensor Applications. Sensors, 19(1), 121. https://doi.org/10.3390/s19010121