A Sound Source Localisation Analytical Method for Monitoring the Abnormal Night Vocalisations of Poultry

Abstract
1. Introduction
2. Materials and Methods
2.1. Animals and Housing
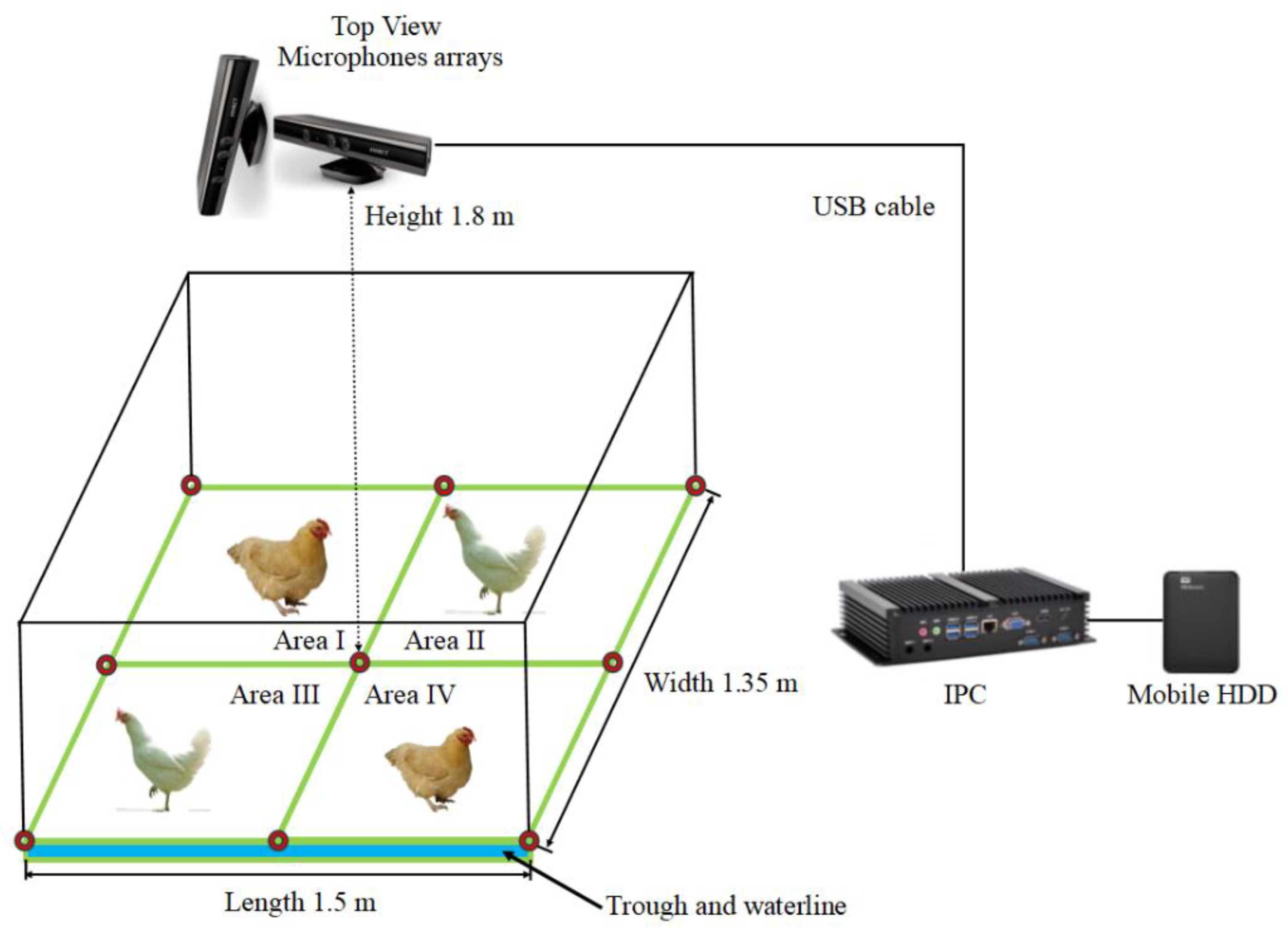
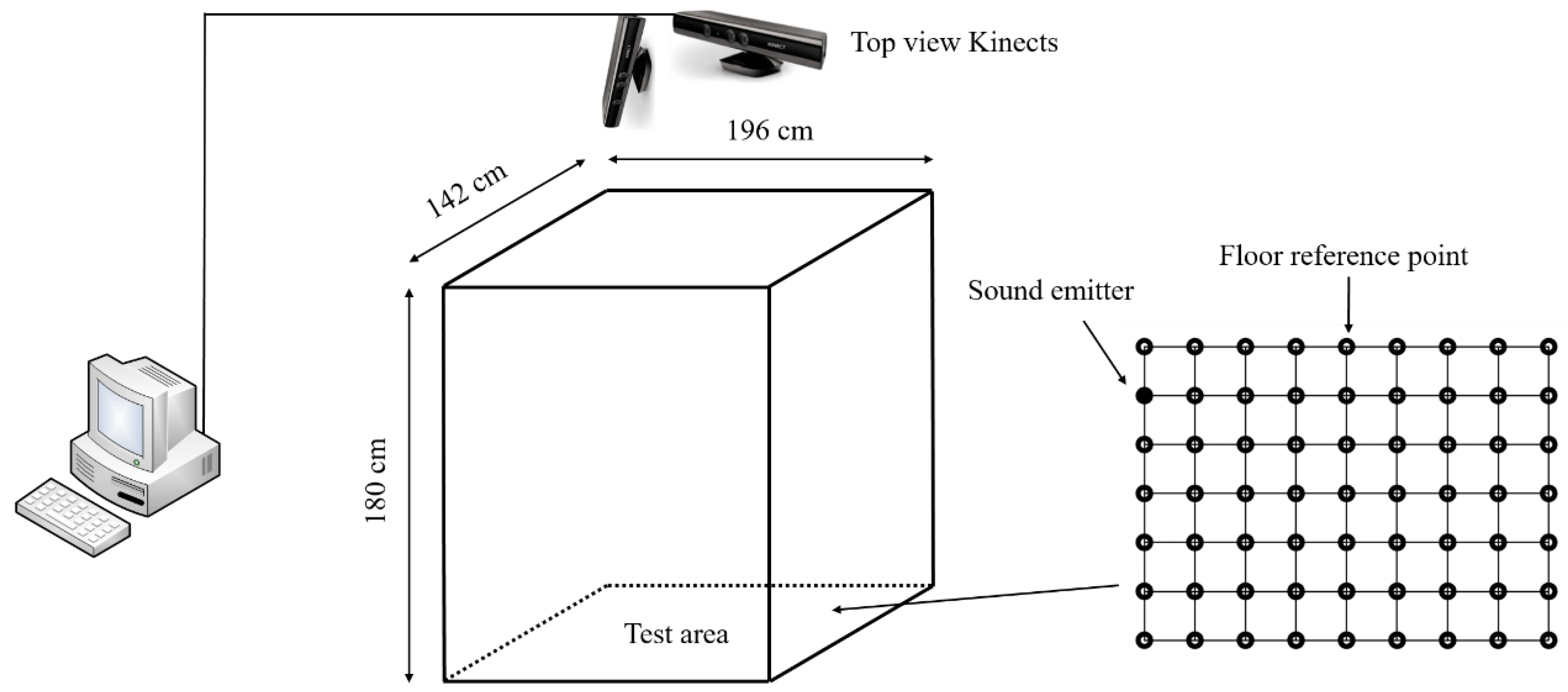
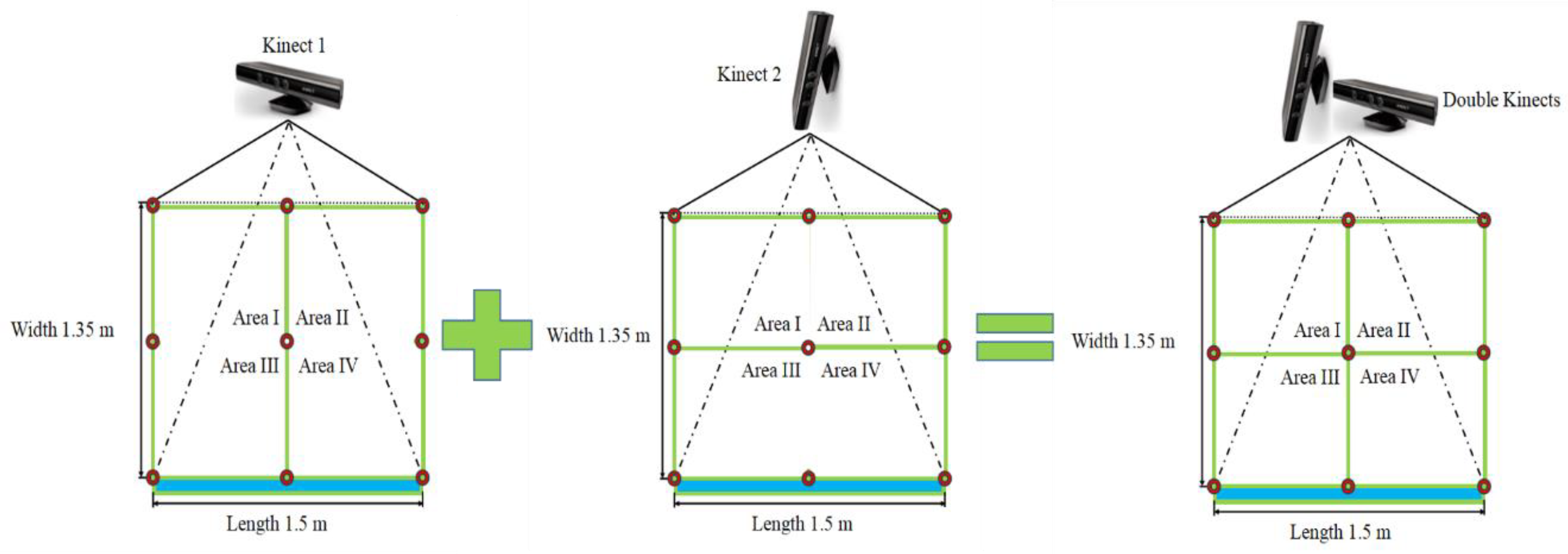
2.2. Experimental Installations
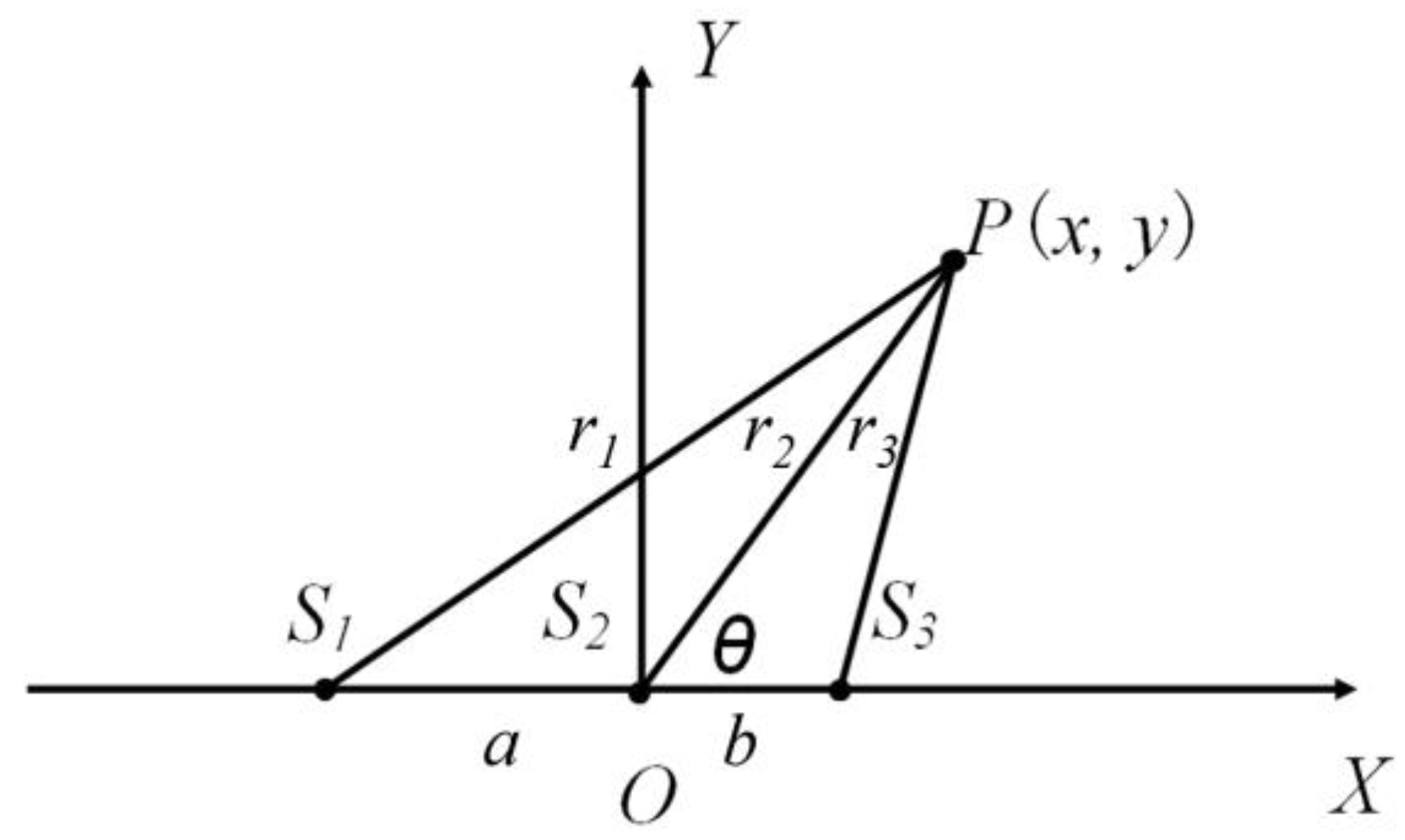
2.3. Sound Source Localisation Method
2.4. SSL Data Processing and Storage
3. Results
3.1. Laboratory Tests
3.2. Small Group Tests
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Manteuffel, G.; Puppe, B.; Schön, P.C. Vocalization of farm animals as a measure of welfare. Appl. Anim. Behav. Sci. 2004, 88, 163–182. [Google Scholar] [CrossRef]
- Exadaktylos, V.; Silva, M.; Aerts, J.M.; Taylor, C.J.; Berckmans, D. Real-time recognition of sick pig cough sounds. Comput. Electron. Agric. 2008, 63, 207–214. [Google Scholar] [CrossRef]
- Ferrari, S.; Piccinini, R.; Silva, M.; Exadaktylos, V.; Berckmans, D.; Guarino, M. Cough sound description in relation to respiratory diseases in dairy calves. Prev. Vet. Med. 2010, 96, 276–280. [Google Scholar] [CrossRef] [PubMed]
- Steen, K.A.; Therkildsen, O.R.; Karstoft, H.; Green, O.A. Vocal-Based Analytical Method for Goose Behaviour Recognition. Sensors 2012, 12, 3773–3788. [Google Scholar] [CrossRef] [PubMed]
- Van Hirtum, A.; Berckmans, D. Fuzzy approach for improved recognition of citric acid induced piglet coughing from continuous registration. J. Sound Vib. 2003, 266, 677–686. [Google Scholar] [CrossRef]
- Ferrari, S.; Silva, M.; Guarino, M.; Aerts, J.M.; Berckmans, D. Cough sound analysis to identify respiratory infection in pigs. Comput. Electron. Agric. 2008, 64, 318–325. [Google Scholar] [CrossRef]
- Guarino, M.; Jans, P.; Costa, A.; Aerts, J.M.; Berckmans, D. Field test of algorithm for automatic cough detection in pig houses. Comput. Electron. Agric. 2008, 62, 22–28. [Google Scholar] [CrossRef]
- Silva, M.; Exadaktylos, V.; Ferrari, S.; Guarino, M.; Aerts, J.M.; Berckmans, D. The influence of respiratory disease on the energy envelope dynamics of pig cough sounds. Comput. Electron. Agric. 2009, 69, 80–85. [Google Scholar] [CrossRef]
- Zimmerman, P.H.; Koene, P. The effect of frustrative nonreward on vocalisations and behaviour in the laying hen, Gallus gallus domesticus. Behav. Process. 1998, 44, 73–79. [Google Scholar] [CrossRef]
- Evans, C.S.; Evans, L. Chicken food calls are functionally referential. Anim. Behav. 1999, 58, 307–319. [Google Scholar] [CrossRef] [PubMed]
- Wauters, A.M.; Richard-Yris, M.A. Mutual influence of the maternal hen’s food calling and feeding behavior on the behavior of her chicks. Dev. Psychobiol. 2002, 41, 25–36. [Google Scholar] [CrossRef] [PubMed]
- Aydin, A.; Bahr, C.; Viazzi, S.; Exadaktylos, V.; Buyse, J.; Berckmans, D. A novel method to automatically measure the feed intake of broiler chickens by sound technology. Comput. Electron. Agric. 2014, 101, 17–23. [Google Scholar] [CrossRef]
- Aydin, A.; Bahr, C.; Berckmans, D. A real-time monitoring tool to automatically measure the feed intakes of multiple broiler chickens by sound analysis. Comput. Electron. Agric. 2015, 114, 1–6. [Google Scholar] [CrossRef]
- Aydin, A.; Berckmans, D. Using sound technology to automatically detect the short-term feeding behaviours of broiler chickens. Comput. Electron. Agric. 2016, 121, 25–31. [Google Scholar] [CrossRef]
- Silva, M.; Ferrari, S.; Costa, A.; Aerts, J.M.; Guarino, M.; Berckmans, D. Cough localization for the detection of respiratory diseases in pig houses. Comput. Electron. Agric. 2008, 64, 286–292. [Google Scholar] [CrossRef]
- Yu, L.G.; Teng, G.H.; Li, B.M.; Lao, F.D.; Cao, Y.F. Classification Methods of Vocalization for Laying Hens in Perch System. Trans. Chin. Soc. Agric. Mach. 2013, 9, 236–242. [Google Scholar]
- Cao, Y.F.; Chen, H.Q.; Teng, G.H.; Zhao, S.M.; Li, Q.W. Detection of Laying Hens Vocalization Based on Power Spectral Density. Trans. Chin. Soc. Agric. Mach. 2015, 2, 276–280. [Google Scholar]
- Cai, W.P.; Wang, S.K.; Wu, Z.Y. Accelerated steered response power method for sound source localization using orthogonal linear array. Appl. Acoust. 2010, 71, 134–139. [Google Scholar] [CrossRef]
- Bower, J.L.; Clark, C.W. A Field Test of the Accuracy of a Passive Acoustic Location System. Bioacoustics 2005, 15, 1–14. [Google Scholar] [CrossRef]
- Mennill, D.J.; Battiston, M.; Wilson, D.R.; Foote, J.R.; Doucet, S.M. Field test of an affordable, portable, wireless microphone array for spatial monitoring of animal ecology and behaviour. Methods Ecol. Evol. 2012, 3, 704–712. [Google Scholar] [CrossRef]
- Mennill, D.J.; Vehrencamp, S.L. Context-Dependent Functions of Avian Duets Revealed by Microphone-Array Recordings and Multispeaker Playback. Curr. Biol. 2008, 18, 1314–1319. [Google Scholar] [CrossRef] [PubMed]
- Blumstein, D.T.; Mennill, D.J.; Clemins, P.; Girod, L.; Yao, K.; Patricelli, G.; Deppe, J.L.; Krakauer, A.H.; Clark, C.; Cortopassi, K.A.; et al. Acoustic monitoring in terrestrial environments using microphone arrays: Applications, technological considerations and prospectus. J. Appl. Ecol. 2011, 48, 758–767. [Google Scholar] [CrossRef]
- Jana, A. Kinect for Windows SDK Programming Guide; Packt Publishing Ltd.: Birmingham, UK, 2012; ISBN 978-1-84969-238-0. [Google Scholar]
- Seewald, L.A.; Gonzaga, L.; Veronez, M.R.; Minotto, V.P.; Jung, C.R. Combining SRP-PHAT and two Kinects for 3D Sound Source Localization. Expert Syst. Appl. 2014, 41, 7106–7113. [Google Scholar] [CrossRef]
- Kunin, V.; Turqueti, M.; Saniie, J.; Oruklu, E. Direction of Arrival Estimation and Localization Using Acoustic Sensor Arrays. J. Sens. Technol. 2011, 1, 71–80. [Google Scholar] [CrossRef]
- Jin, Y.; Yang, R.Z. Research Status and Prospect of the Acoustic Localization Techniques. Audio Eng. 2007, 31, 4–8. (In Chinese) [Google Scholar]
- Benesty, J.; Chen, J.; Huang, Y. Microphone Array Signal Processing; Spring: Berlin/Heidelberg, Germany, 2008; pp. 181–184. ISBN 978-3-540-78611-5. [Google Scholar]
- Rascon, C.; Fuentes, G.; Meza, I. Lightweight multi-DOA tracking of mobile speech sources. Eurasip J. Audio Speech 2015. [Google Scholar] [CrossRef]
- Galatas, G.; Ferdous, S.; Makedon, F. Multi-modal Person Localization and Emergency Detection Using The Kinect. Int. J. Adv. Res. Artif. Intell. 2013, 2, 41–46. [Google Scholar]
- Grubbs, F.E. Sample Criteria for Testing Outlying Observations. Ann. Math. Stat. 1950, 21, 27–58. [Google Scholar] [CrossRef]
- Hy-Line. Parent Stock Management Guides. Available online: http://www.hyline.com/aspx/general/dynamicpage.aspx?id=255 (accessed on 17 April 2016).
- Shimmura, T.; Yoshimura, T. Circadian clock determines the timing of rooster crowing. Curr. Biol. 2013, 23, R231–R233. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.F.; Yu, L.G.; Teng, G.H.; Zhao, S.M.; Liu, X.M. Feature extraction and classification of laying hens’ vocalization and mechanical noise. Trans. Chin. Soc. Agric. Eng. 2014, 18, 190–197. [Google Scholar]
- Reddy, V.R.; Deshpande, P.; Dasgupta, R. Robotics Audition using Kinect. In Proceedings of the 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 February 2015; IEEE: New York, NY, USA; pp. 34–41. [Google Scholar]
- Wang, S.; Yang, P.; Sun, H. Design and Implementation of Auditory System for Mobile Robot Based on Kinect Sensor. In Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; IEEE: New York, NY, USA; pp. 3094–3098. [Google Scholar]
- Tiecheng, L. The importance and method of feed restriction in laying hens’ growing period. Mod. Anim. Husb. Sci. Technol. 2018, 1, 24. (In Chinese) [Google Scholar]
- Kuhne, F.; Sauerbrey, A.F.C.; Adler, S. The discrimination-learning task determines the kind of frustration-related behaviours in laying hens (Gallus gallus domesticus). Appl. Anim. Behav. Sci. 2013, 148, 192–200. [Google Scholar] [CrossRef]
- Kashiha, M.; Pluk, A.; Bahr, C.; Vranken, E.; Berckmans, D. Development of an early warning system for a broiler house using computer vision. Biosyst. Eng. 2013, 116, 36–45. [Google Scholar] [CrossRef]
- Spiesberger, J.L. Hyperbolic location errors due to insufficient numbers of receivers. J. Acoust. Soc. Am. 2001, 109, 3076–3079. [Google Scholar] [CrossRef] [PubMed]
- Digby, A.; Towsey, M.; Bell, B.D.; Teal, P.D. Temporal and environmental influences on the vocal behaviour of a nocturnal bird. J. Avian Biol. 2014, 45, 591–599. [Google Scholar] [CrossRef]
- Perrault, K.; Lobert, L.M.; Ehnes, M.; Foote, J.R. Nocturnal singing in a temperate bird community. J. Ornithol. 2014, 155, 1059–1062. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle measurement | −28° | −22° | −15° | −8° | 0° | 8° | 15° | 22° | 28° |
| Absolute error (°) | 1 | 2 | 2 | 2 | 0 | 2 | 2 | 1 | 0 |
| Day | Time (h) | Number of SSLs | Number of Non-Null SSLs | Number of Valid SSLs | Test Type | Remarks |
|---|---|---|---|---|---|---|
| 28 October | 2 | 1550 | 458 | 450 | Laboratory | Single Kinect test |
| 29 October | 2 | 1722 | 629 | 618 | ||
| Total | 4 | 3272 | 1087 | 1068 | ||
| 30 October | 2 | 751 | 266 | 261 | Laboratory | Double Kinects test |
| 31 October | 1 | 369 | 164 | 159 | One chicken | |
| Total | 3 | 1120 | 430 | 354 | ||
| 1 November | 10 | 23,149 | 2366 | 2314 | Small group | Continuous monitoring |
| 2 November | 14 | 31,459 | 2038 | 1989 | ||
| 3 November | 14 | 32,099 | 1123 | 1106 | ||
| 4 November | 12 | 23,959 | 2167 | 2139 | 22:00–24:00 data lost | |
| 5 November | 9 | 15,540 | 2276 | 2249 | 0:00–4:00 data lost | |
| 6 November | 14 | 23,903 | 3975 | 3897 | Continuous monitoring | |
| 7 November | 14 | 24,910 | 992 | 976 | ||
| Total | 87 | 175,019 | 14,937 | 14,670 |
| Source Position | Number of Correct SSLs | Number of Incorrect SSLs | Total Number | Accuracy (%) |
|---|---|---|---|---|
| Area I | 66 | 6 | 72 | 91.7 |
| Area II | 52 | 34 | 86 | 60.5 |
| Area III | 18 | 3 | 21 | 85.7 |
| Area IV | 59 | 23 | 82 | 72.0 |
| Total | 195 | 66 | 261 | 74.7 |
| Source Position | Number of Correct SSLs | Number of Incorrect SSLs | Total Number | Accuracy (%) |
|---|---|---|---|---|
| Area I | 44 | 12 | 56 | 78.6 |
| Area II | 42 | 19 | 61 | 68.9 |
| Area III | 20 | 7 | 27 | 74.1 |
| Area IV | 11 | 4 | 15 | 73.3 |
| Total | 117 | 42 | 159 | 73.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Lao, F.; Teng, G. A Sound Source Localisation Analytical Method for Monitoring the Abnormal Night Vocalisations of Poultry. Sensors 2018, 18, 2906. https://doi.org/10.3390/s18092906
Du X, Lao F, Teng G. A Sound Source Localisation Analytical Method for Monitoring the Abnormal Night Vocalisations of Poultry. Sensors. 2018; 18(9):2906. https://doi.org/10.3390/s18092906
Chicago/Turabian StyleDu, Xiaodong, Fengdan Lao, and Guanghui Teng. 2018. "A Sound Source Localisation Analytical Method for Monitoring the Abnormal Night Vocalisations of Poultry" Sensors 18, no. 9: 2906. https://doi.org/10.3390/s18092906
APA StyleDu, X., Lao, F., & Teng, G. (2018). A Sound Source Localisation Analytical Method for Monitoring the Abnormal Night Vocalisations of Poultry. Sensors, 18(9), 2906. https://doi.org/10.3390/s18092906