Accurate Device-Free Tracking Using Inexpensive RFIDs

 and
and
Abstract
1. Introduction
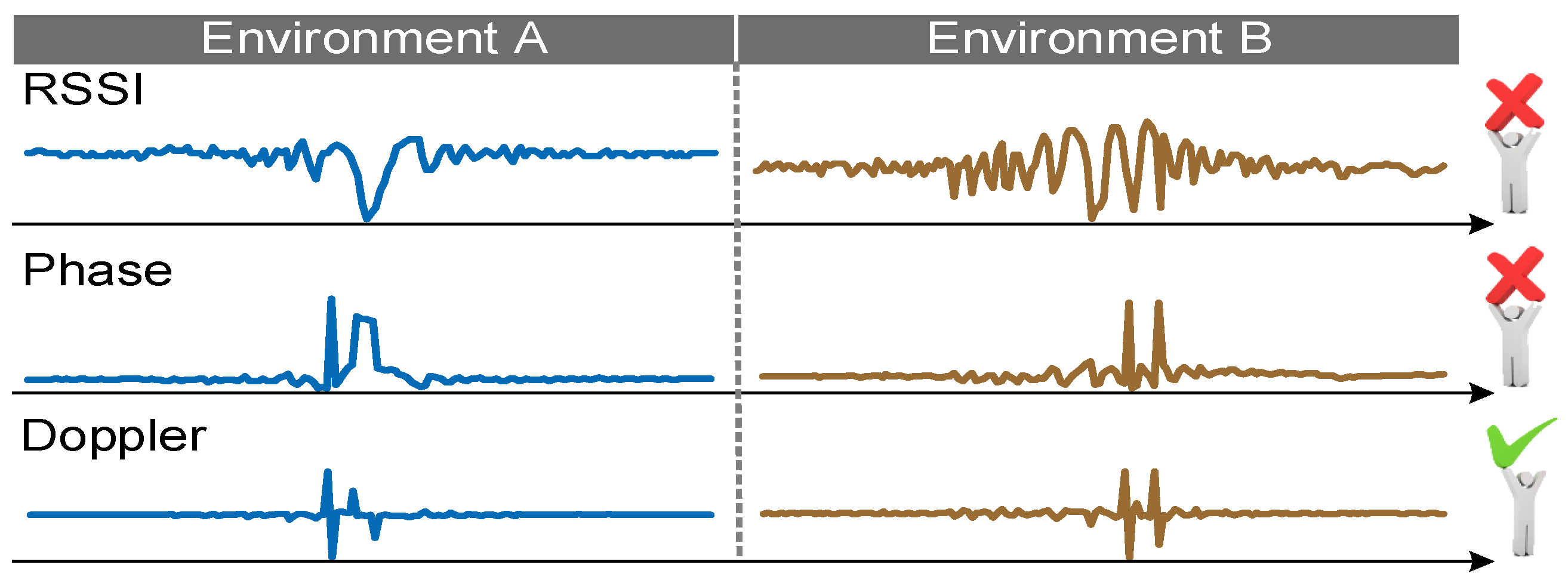
- It presents a device-free tracking scheme that exploits Doppler shifts as a feature of the target’s motion. As a result, the design delivers fine-grained resolution in different environments with different multipath conditions.
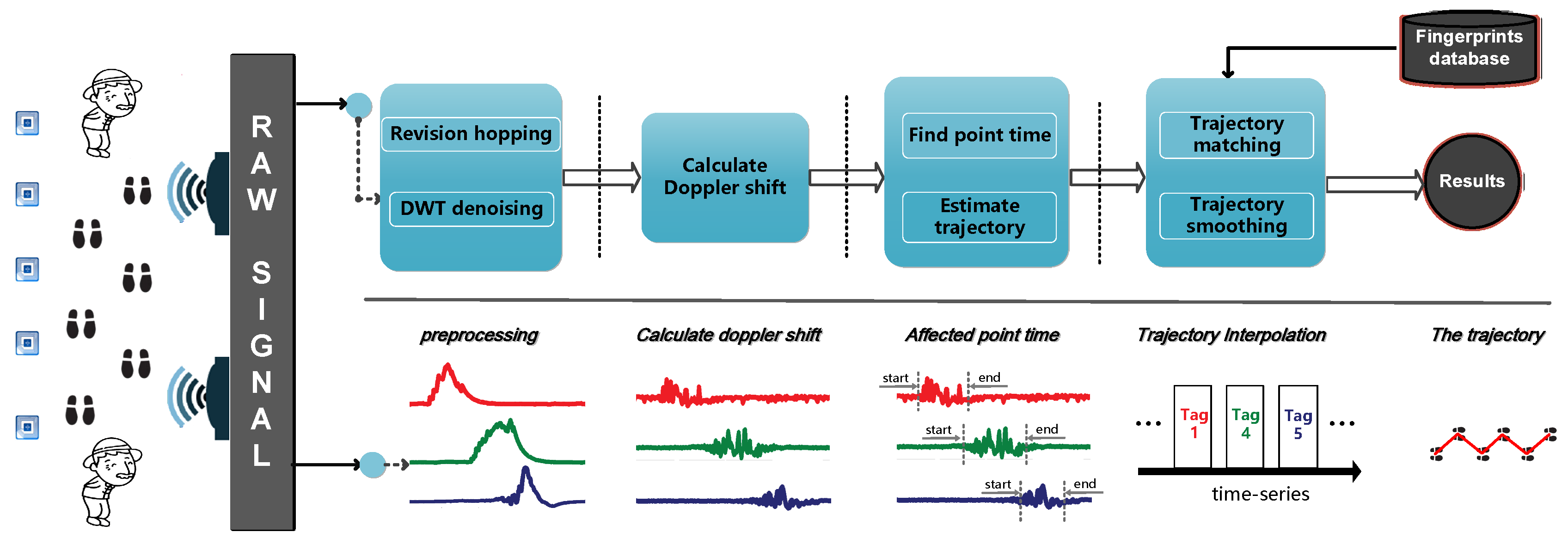
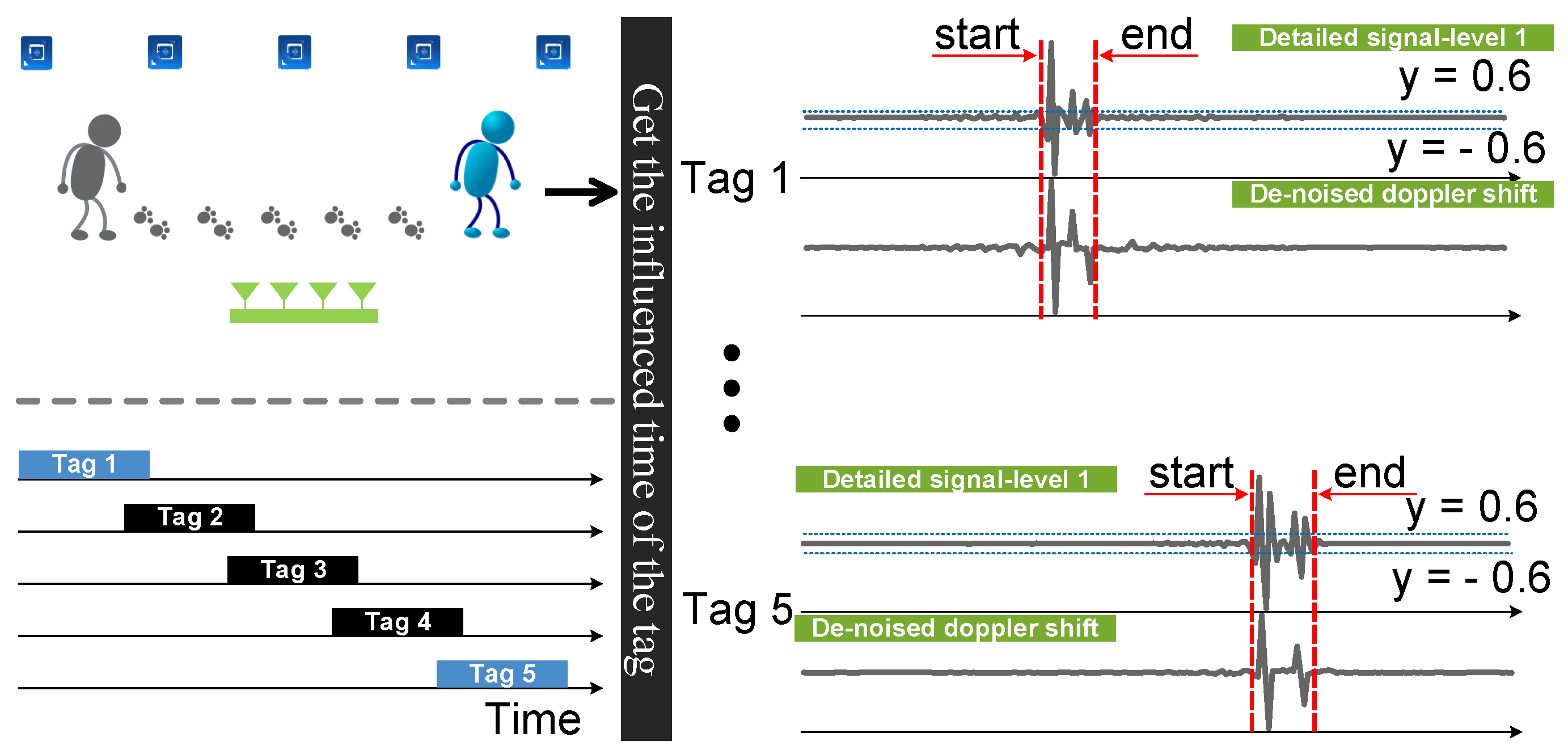
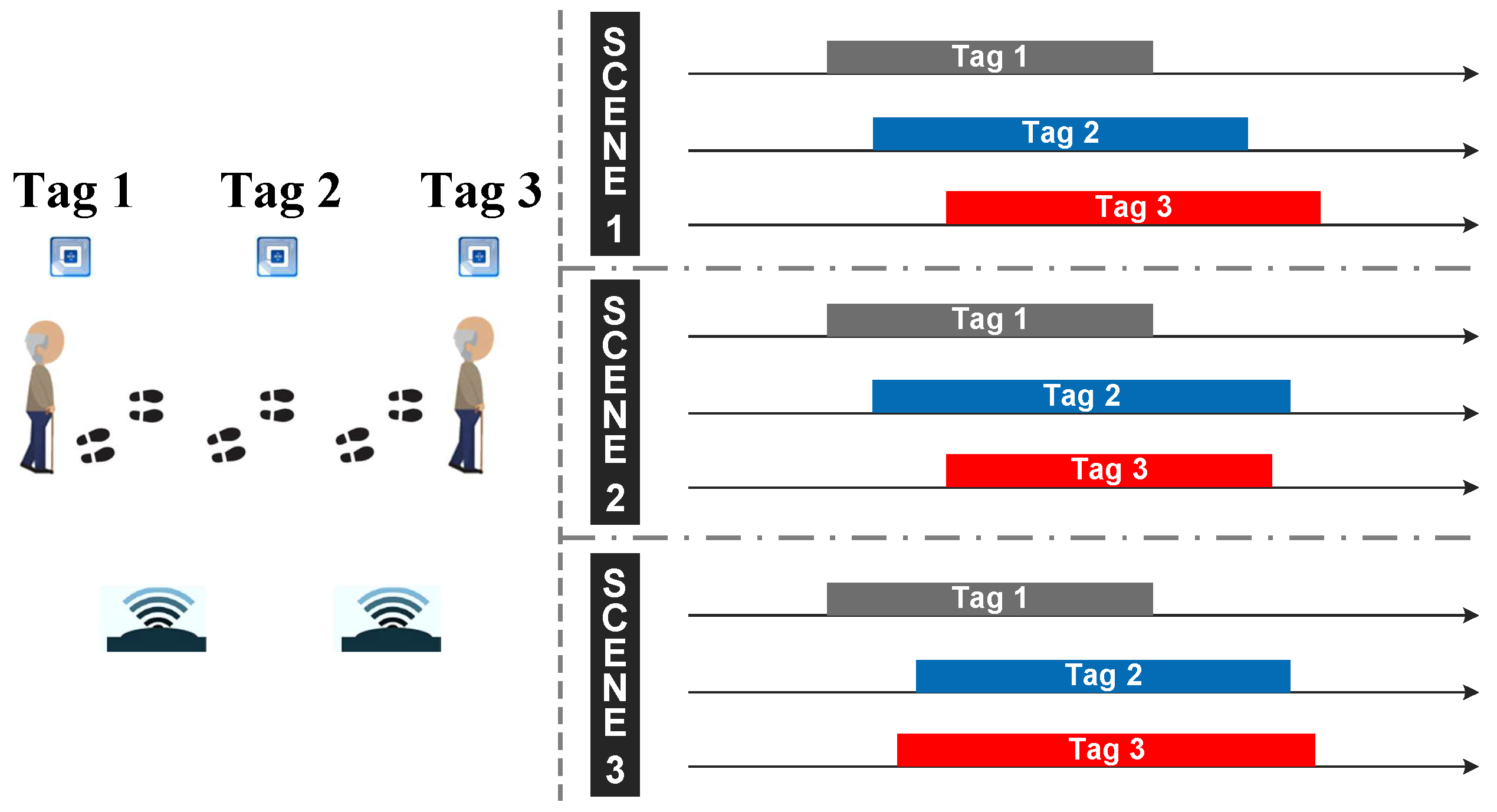
- It is the first to demonstrate the capability of the DWT technique to detect the beginning and the ending of the influenced time for each tag caused by the target motion, and we successfully use it to track the target. While our scheme has been verified in the context of RFIDs, the basic idea can be extended to other tracking systems.
- It presents a less complex trajectory estimation model, which has a high tracking accuracy of 32 cm.
- It demonstrates a prototype system and evaluates it in real-world deployments.
2. Background and Analysis
2.1. Backscatter Communication
- There is no carrier frequency offset between the reader and the tag, because the tag does not generate its own RF signal, but rather reflects the reader’s signal [19]. Hence, the reader can use coherent detection to recover the complex channel values of the tag. These channels are available to the tracking systems and are used by many proposals [11,12,21,22], as well as ours.
- The passive RFID system’s range is limited by the reader’s sensitivity to the reflected signal and by the amount of energy that reaches the tag from the reader. The actual return signal is tiny as a result of two attenuations, including the first attenuation occurring as EM waves [19] radiating from the reader to the tag and the second attenuation occurring when reflected waves come back from the tag to the reader. Therefore, the returning energy is , where r is the distance between the tag and the reader. Providing accurate tracking information while keeping the range large will be the valuable and necessary features of RFID systems.
2.2. Signal Characteristics
2.2.1. RF Phase
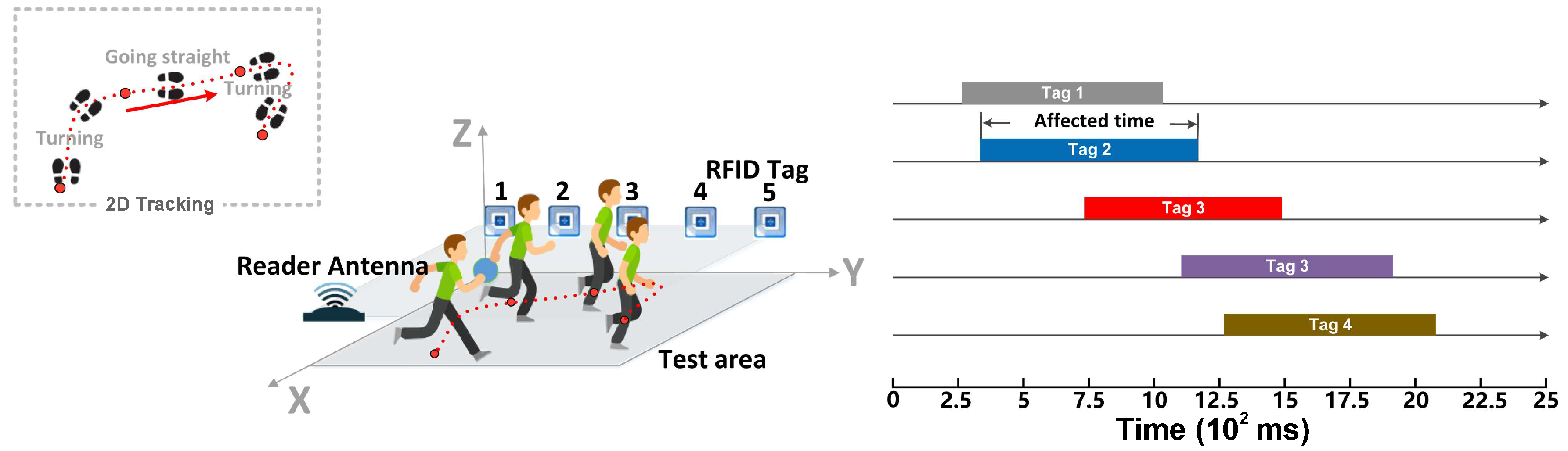
2.2.2. Doppler Frequency Shift
3. System Overview
4. Data Extraction
4.1. Revision on the Random Hopping
4.2. Noise Reduction Using DWT
4.2.1. Decomposition
4.2.2. Threshold Denoising
4.2.3. Reconstruction
4.3. Calculate Doppler Frequency Shift Using Phase Profile
5. Trajectory Mapping
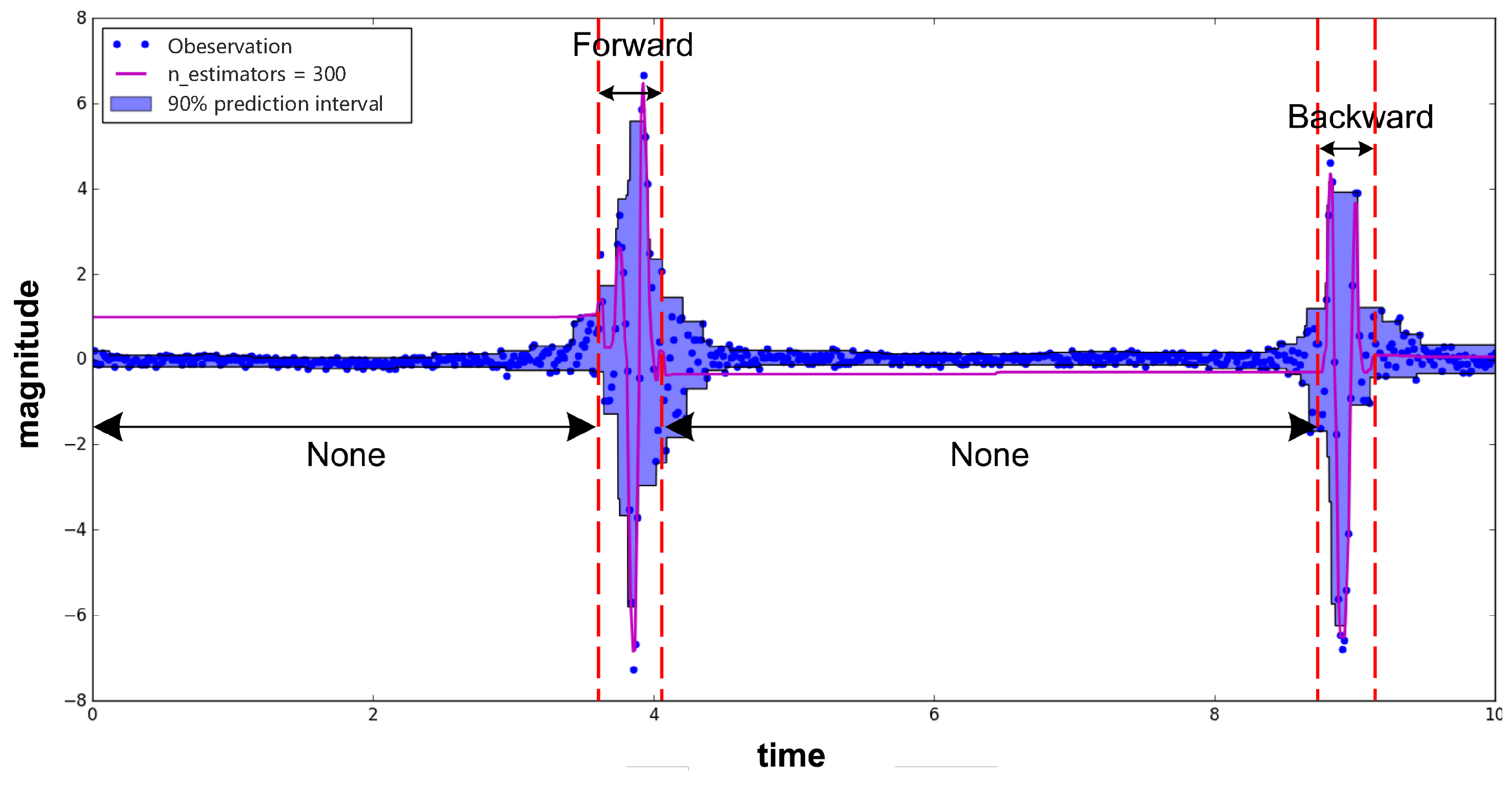
5.1. Motion Detection and Segmentation
5.2. Trajectory Estimate
5.3. Trajectory Smoothing
5.3.1. Data Normalization
5.3.2. Decision Tree Regression Based on AdaBoost
5.3.3. Trajectory Estimating Model Based on HMM
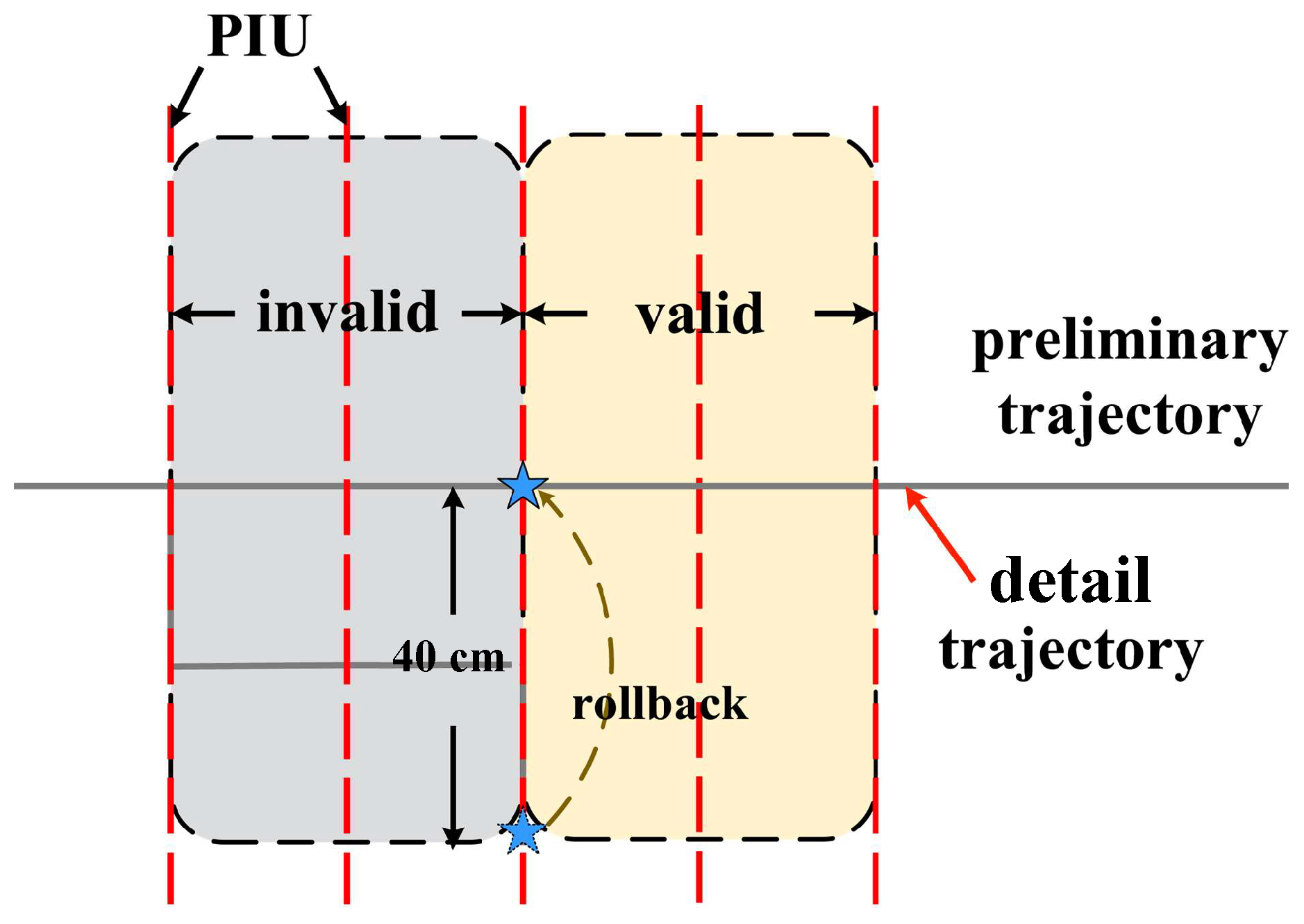
5.3.4. Trajectory Detailing and Smoothing
6. Implementation and Evaluation
- (1)
- The robustness of RDTrack in PIU recognition.
- (2)
- The effectiveness of RDTrack with different parameters.
6.1. Implementation
6.1.1. Hardware
6.1.2. Default Deployment Set
6.1.3. Reference Profiles Setup
6.2. Effectiveness Validation
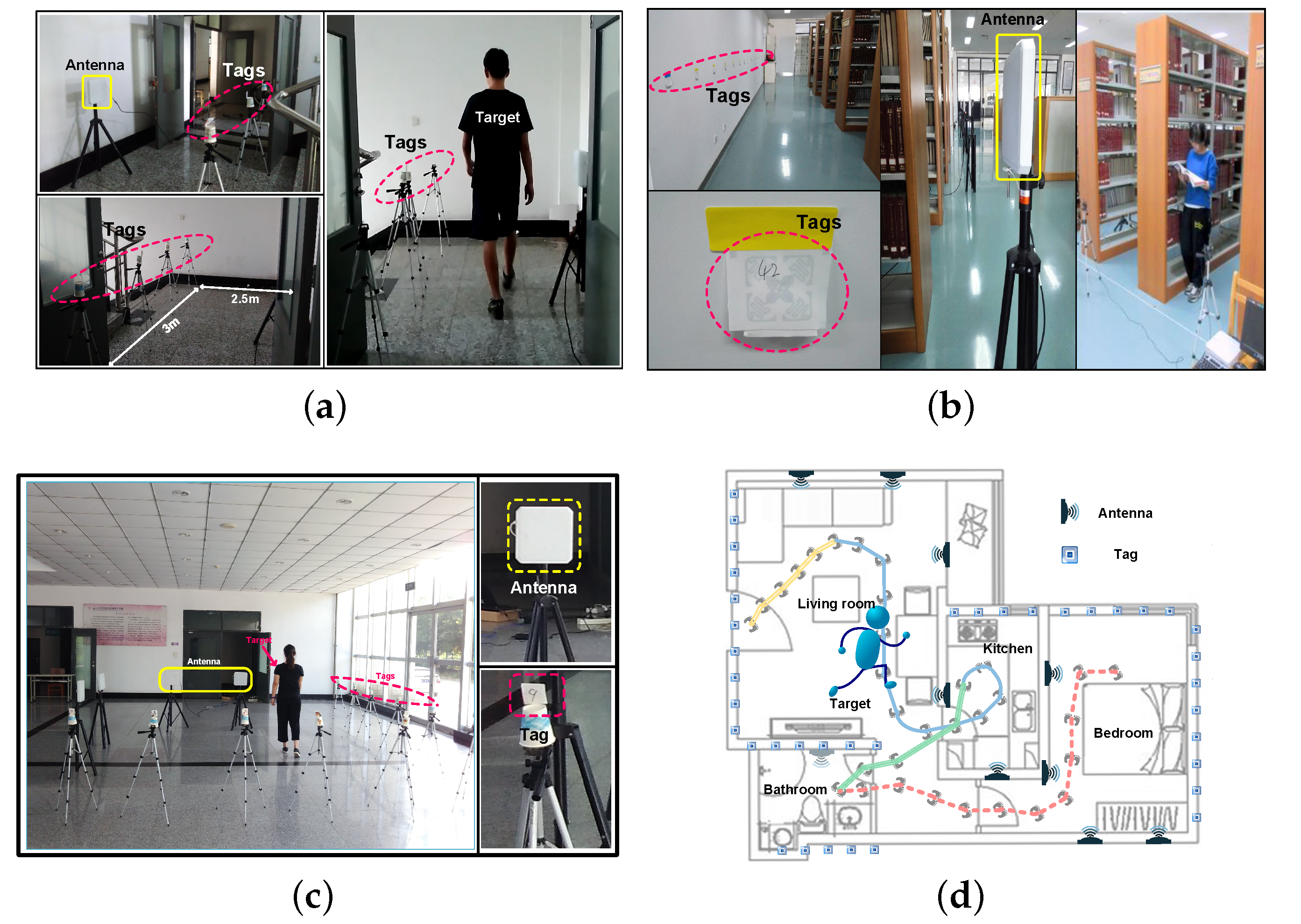
- A small short corridor between staircases, which has a length and width of 2 m × 3.5 m, as shown in Figure 11a.
- The reading room of the library on our campus, which has a length and width of 1 0 m × 12 m, as shown in Figure 11b.
- The first floor of our laboratory building, which has a length and width of 5 m × 7 m, as is shown in Figure 11c.
- A typical apartment consisting of a living room connected to the kitchen, bathroom and bedroom, which covers 8 m × 9 m, as shown in Figure 11d.
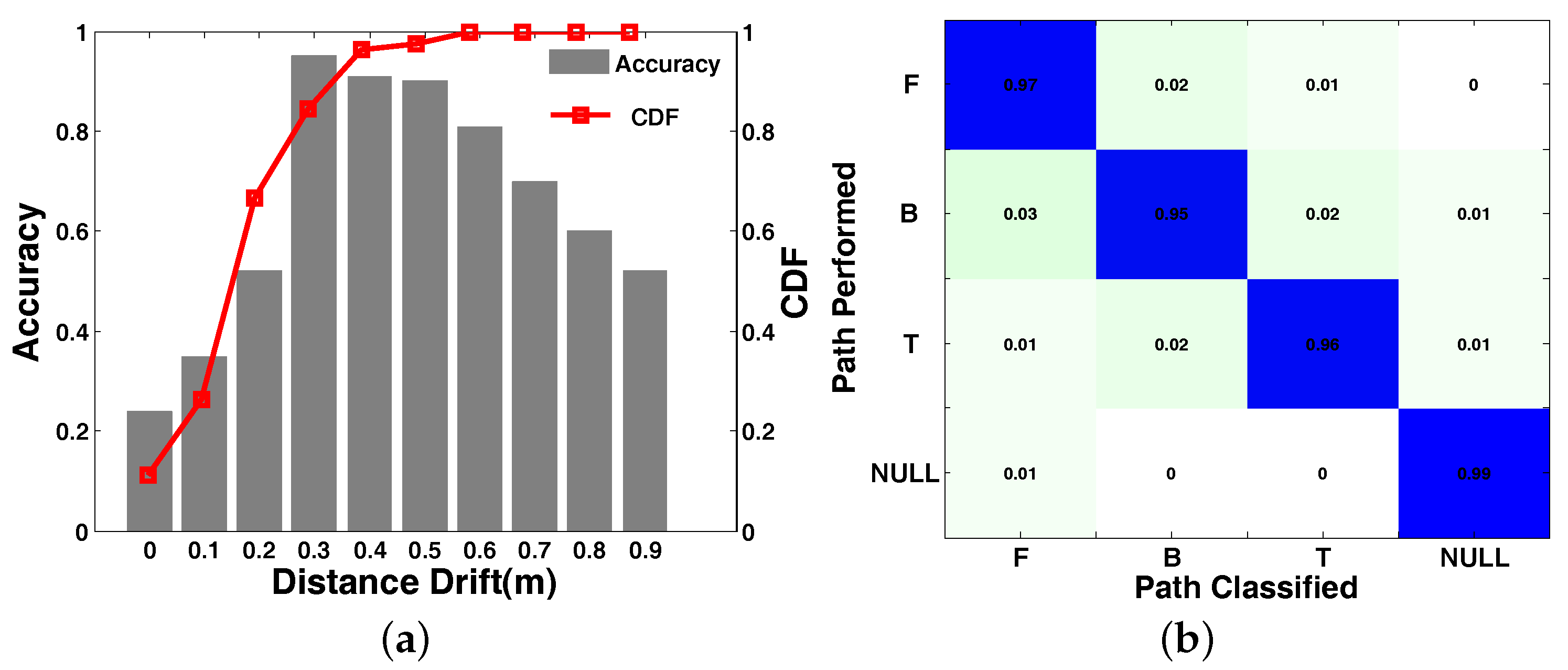
6.2.1. Segmentation Accuracy
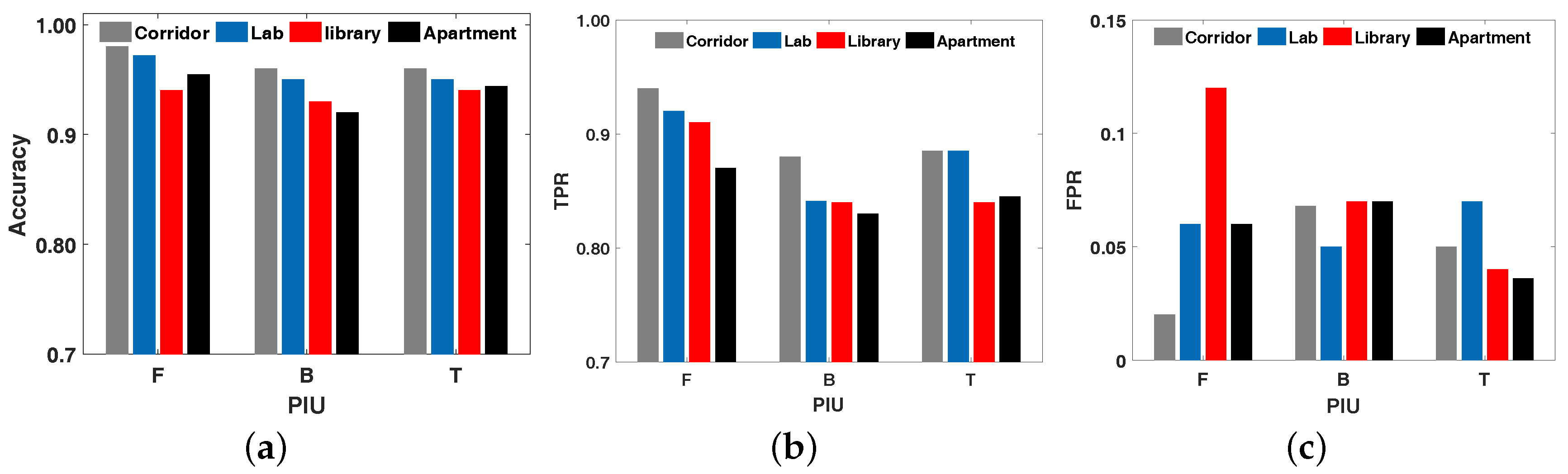
6.2.2. Motion Recognition Accuracy
- (a)
- True Positive Rate (TPR): The accuracy of RDTrack. The proportion of the number of PIU that have been correctly identified to the total number of PIU.
- (b)
- False Positive Rate (FPR): The proportion of the number of other activities that were misjudged as Activity B to the total number of Activity B.
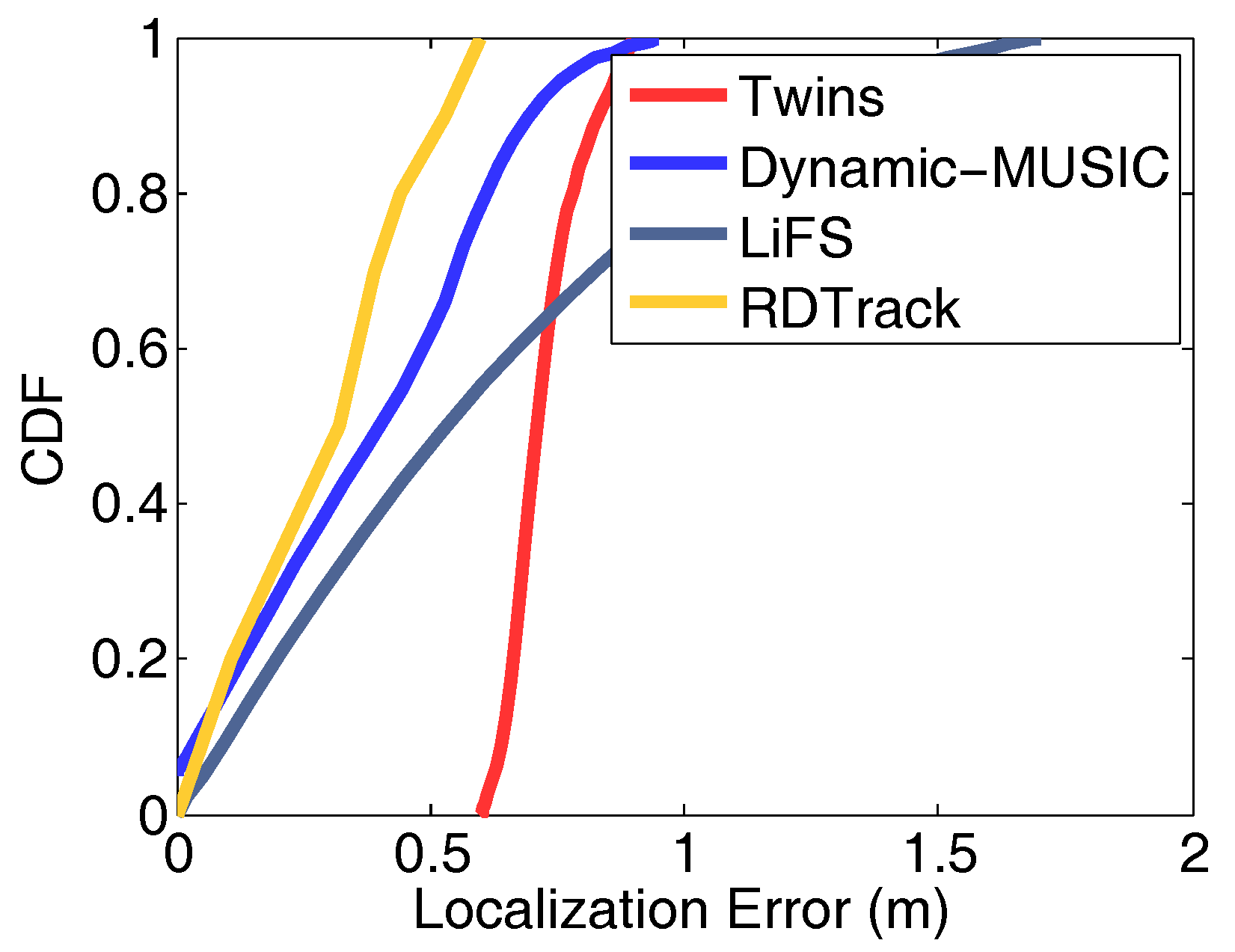
6.2.3. System Performance
6.3. Evaluation under Different Parameters
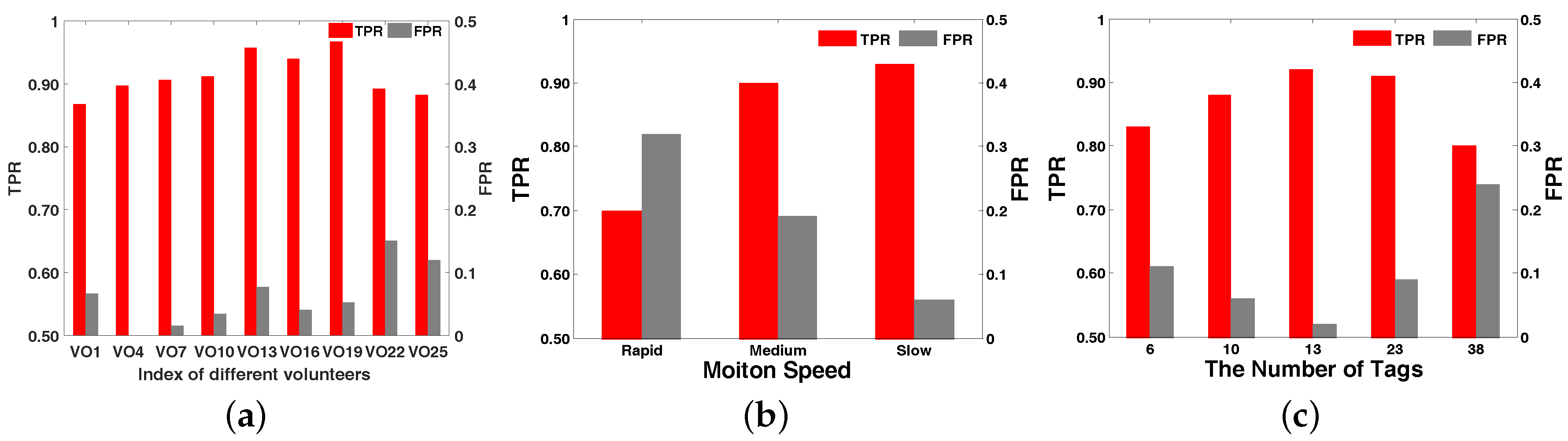
6.3.1. Impact of Human Diversity
6.3.2. Impact of the Motion Speed
6.3.3. Impact of the Numbers of Tags
6.3.4. Impact of Moving Direction
6.3.5. Impact of the Experimental Environment
6.4. Supplemental Experiment
6.4.1. Impact of the Number of Targets
6.4.2. Impact of Multiple Readers
7. Related Work
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RFID | Radio Frequency Identification |
| RF | Radio Frequency |
| RSSI | Received Signal Strength Indicator |
| CSI | Channel State Information |
| FMCW | Frequency-Modulated Continuous Wave |
| USRP | Universal Software Radio Peripheral |
| DWT | Discrete Wavelet Transform |
| PIU | Path Information Unit |
| UHF | Ultra-High Frequency |
| RSS | Received Signal Strength |
| V | Velocity |
| HMM | Hidden Markov Model |
| IoT | Internet of Things |
References
- Buccafurri, F.; Lax, G.; Nicolazzo, S.; Nocera, A. A privacy-preserving solution for tracking people in critical environments. In Proceedings of the 2014 IEEE 38th International Computer Software and Applications Conference Workshops (COMPSACW), Vasteras, Sweden, 21–25 July 2014; pp. 146–151. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Object tracking benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed]
- Honegger, D.; Meier, L.; Tanskanen, P.; Pollefeys, M. An open source and open hardware embedded metric optical flow cmos camera for indoor and outdoor applications. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 1736–1741. [Google Scholar]
- Page, M.J.; Lourenço, A.L.; David, T.; LeBeau, A.M.; Cattaruzza, F.; Castro, H.C.; VanBrocklin, H.F.; Coughlin, S.R.; Craik, C.S. Non-invasive imaging and cellular tracking of pulmonary emboli by near-infrared fluorescence and positron-emission tomography. Nat. Commun. 2015, 6, 8448. [Google Scholar] [CrossRef] [PubMed]
- Blumrosen, G.; Hod, B.; Anker, T.; Dolev, D.; Rubinsky, B. Enhancing RSSI-based tracking accuracy in wireless sensor networks. ACM Trans. Sens. Netw. 2013, 9, 29. [Google Scholar] [CrossRef]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. Hybrid FMCW-interferometry radar system in the 5.8 GHz ISM band for indoor precise position and motion detection. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (IMS), Seattle, WA, USA, 2–7 June 2013; pp. 1–4. [Google Scholar]
- Xiao, J.; Wu, K.; Yi, Y.; Wang, L.; Ni, L.M. Pilot: Passive device-free indoor localization using channel state information. In Proceedings of the 2013 IEEE 33rd International Conference on Distributed Computing Systems (ICDCS), Philadelphia, PA, USA, 8–11 July 2013; pp. 236–245. [Google Scholar]
- El-Kafrawy, K.; Youssef, M.; El-Keyi, A.; Naguib, A. Propagation modeling for accurate indoor WLAN RSS-based localization. In Proceedings of the IEEE 72nd Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Sabek, I.; Youssef, M.; Vasilakos, A.V. ACE: An accurate and efficient multi-entity device-free WLAN localization system. IEEE Trans. Mob. Comput. 2015, 14, 261–273. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, H.; Xiong, J.; Jamieson, K.; Chen, X.; Fang, D.; Xie, B. LiFS: low human-effort, device-free localization with fine-grained subcarrier information. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking (MobiCom’16), New York City, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- Guo, Y.; Yang, L.; Li, B.; Liu, T.; Liu, Y. Rollcaller: User-friendly indoor navigation system using human-item spatial relation. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 2840–2848. [Google Scholar]
- Han, J.; Qian, C.; Wang, X.; Ma, D.; Zhao, J.; Zhang, P.; Xi, W.; Jiang, Z. Twins: Device-free object tracking using passive tags. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 469–476. [Google Scholar]
- Alessio, S.M. Discrete Wavelet Transform (DWT). In Digital Signal Processing and Spectral Analysis for Scientists; Springer: Berlin/Heidelberg, Germany, 2016; pp. 645–714. [Google Scholar]
- Banik, B.G.; Bandyopadhyay, S.K. Secret Sharing Using 3 Level DWT Method of Image Steganography Based on Lorenz Chaotic Encryption and Visual Cryptography. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; pp. 1147–1152. [Google Scholar]
- Kashyap, N.; Sinha, G. Image watermarking using 3-level discrete wavelet transform (DWT). Int. J. Mod. Educ. Comput. Sci. 2012, 4, 50–56. [Google Scholar] [CrossRef]
- Dong, W.; Ding, H. Full frequency de-noising method based on wavelet decomposition and noise-type detection. Neurocomputing 2016, 214, 902–909. [Google Scholar] [CrossRef]
- Madhu, S.; Bhavani, H.; Sumathi, S. Performance analysis of thresholding techniques for denoising of simulated partial discharge signals corrupted by Gaussian white noise. In Proceedings of the 2015 International Conference on Power and Advanced Control Engineering (ICPACE), Bangalore, India, 12–14 August 2015; pp. 399–404. [Google Scholar]
- Zaytsev, K.I.; Chernomyrdin, N.V.; Gorevoy, A.V.; Trofimov, N.E.; Fokina, I.N.; Alekhnovich, V.I.; Karasik, V.E.; Yurchenko, S.O. An approach for automatic construction of the wavelet-domain de-noising procedure for THz pulsed spectroscopy signal processing. J. Phys. Conf. Ser. 2014, 486, 012034. [Google Scholar] [CrossRef]
- Finkenzeller, K. Physical principles of RFID systems. In RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and near-Field Communication, Third Edition; Wiley: New York, NY, USA, 2010; pp. 61–154. [Google Scholar]
- Liu, J.; Chen, M.; Chen, S.; Pan, Q.; Chen, L. Tag-compass: Determining the spatial direction of an object with small dimensions. In Proceedings of the INFOCOM 2017—IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar]
- Hekimian-Williams, C.; Grant, B.; Liu, X.; Zhang, Z.; Kumar, P. Accurate localization of RFID tags using phase difference. In Proceedings of the 2010 IEEE International Conference on RFID (IEEE RFID 2010), Orlando, FL, USA, 14–16 April 2010; pp. 89–96. [Google Scholar]
- Wang, J.; Katabi, D. Dude, where’s my card? RFID positioning that works with multipath and non-line of sight. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 51–62. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Youssef, M.; Harras, K.A. Wigest: A ubiquitous WiFi-based gesture recognition system. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 1472–1480. [Google Scholar]
- Ding, W.; Qin, S.J.; Miao, L.; Xi, N.; Li, H.Y.; Wang, Y.C. Selective Method of Wavelet Basis Function and Application in Signal Processing of EGG. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Kunming, China, 20–23 March 2011. [Google Scholar]
- Zhang, Z.; Cheng, Y.; Liu, N.C. Comparison of the effect of mean-based method and z-score for field normalization of citations at the level of Web of Science subject categories. Scientometrics 2014, 101, 1679–1693. [Google Scholar] [CrossRef]
- Mohamad, I.B.; Usman, D. Standardization and its effects on k-means clustering algorithm. Res. J. Appl. Sci. Eng. Technol. 2013, 6, 3299–3303. [Google Scholar] [CrossRef]
- Lakkaraju, H.; Aguiar, E.; Shan, C.; Miller, D.; Bhanpuri, N.; Ghani, R.; Addison, K.L. A machine learning framework to identify students at risk of adverse academic outcomes. In Proceedings of the 21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Sydney, Australia, 10–13 August 2015; pp. 1909–1918. [Google Scholar]
- Collins, M.; Schapire, R.E.; Singer, Y. Logistic Regression, AdaBoost and Bregman Distances. Manag. Learn. 2002, 48, 253–285. [Google Scholar]
- Li, X.; Li, S.; Zhang, D.; Xiong, J.; Wang, Y.; Mei, H. Dynamic-music: accurate device-free indoor localization. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 196–207. [Google Scholar]
- Ligorio, G.; Sabatini, A.M. A novel kalman filter for human motion tracking with an inertial-based dynamic inclinometer. IEEE Trans. Biomed. Eng. 2015, 62, 2033–2043. [Google Scholar] [CrossRef] [PubMed]
- Abdel-Nasser, H.; Samir, R.; Sabek, I.; Youssef, M. MonoPHY: Mono-stream-based device-free WLAN localization via physical layer information. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 4546–4551. [Google Scholar]
- Seifeldin, M.; Saeed, A.; Kosba, A.E.; El-Keyi, A.; Youssef, M. Nuzzer: A large-scale device-free passive localization system for wireless environments. IEEE Trans. Mob. Comput. 2013, 12, 1321–1334. [Google Scholar] [CrossRef]
- Zhang, J.; Lyu, Y.; Patton, J.; Roppel, T.; Periaswamy, S.C.G. BFVP: A Probabilistic UHF RFID tag localization algorithm using Bayesian filter and a variable power RFID model. IEEE Trans. Ind. Electron. 2018, 65, 8250–8259. [Google Scholar] [CrossRef]
- Yang, Q.; Taylor, D.G.; Durgin, G.D. Kalman filter based localization and tracking estimation for HIMR RFID systems. In Proceedings of the 2018 IEEE International Conference on RFID (RFID), Orlando, FL, USA, 10–12 April 2018; pp. 1–5. [Google Scholar]
- Bilodeau, J.S.; Bouzouane, A.; Bouchard, B.; Gaboury, S. An experimental comparative study of RSSI-based positioning algorithms for passive RFID localization in smart environments. J. Ambient Intell. Hum. Comput. 2017, 1–17. [Google Scholar] [CrossRef]
- Sigg, S.; Shi, S.; Buesching, F.; Ji, Y.; Wolf, L. Leveraging RF-channel fluctuation for activity recognition: Active and passive systems, continuous and RSSI-based signal features. In Proceedings of the International Conference on Advances in Mobile Computing & Multimedia, Vienna, Austria, 2–4 December 2013; p. 43. [Google Scholar]
- Pu, Q.; Gupta, S.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 Setember–4 October 2013; pp. 27–38. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Motion | Training Time |
|---|---|---|
| F | Going Straight | 10.23 s |
| B | Going Backward | 10.43 s |
| T | Turning | 2.47 s |
| System | Time Delay | Tag Discovery Accuracy |
|---|---|---|
| RDTrack | ≤0.3 s | 100% |
| Rollcaller | ≤0.5 s | 95% |
| Twins | ≤1.1 s | 98.8% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Guo, C.; Liu, Y.; Zhang, L.; Qi, X.; Ren, Y.; Liu, B.; Chen, F. Accurate Device-Free Tracking Using Inexpensive RFIDs. Sensors 2018, 18, 2816. https://doi.org/10.3390/s18092816
Li L, Guo C, Liu Y, Zhang L, Qi X, Ren Y, Liu B, Chen F. Accurate Device-Free Tracking Using Inexpensive RFIDs. Sensors. 2018; 18(9):2816. https://doi.org/10.3390/s18092816
Chicago/Turabian StyleLi, Liyao, Chongzheng Guo, Yang Liu, Lichao Zhang, Xiaofei Qi, Yuhui Ren, Baoying Liu, and Feng Chen. 2018. "Accurate Device-Free Tracking Using Inexpensive RFIDs" Sensors 18, no. 9: 2816. https://doi.org/10.3390/s18092816
APA StyleLi, L., Guo, C., Liu, Y., Zhang, L., Qi, X., Ren, Y., Liu, B., & Chen, F. (2018). Accurate Device-Free Tracking Using Inexpensive RFIDs. Sensors, 18(9), 2816. https://doi.org/10.3390/s18092816