An Improved Electronic Image Motion Compensation (IMC) Method of Aerial Full-Frame-Type Area Array CCD Camera Based on the CCD Multiphase Structure and Hardware Implementation

Abstract
1. Introduction
1.1. Image Motion and Image Motion Compensation (IMC) Methods
1.2. Electronic Image Motion Compensation (IMC) Method
1.3. The Main Contributions of This Article
2. Problem Formulation
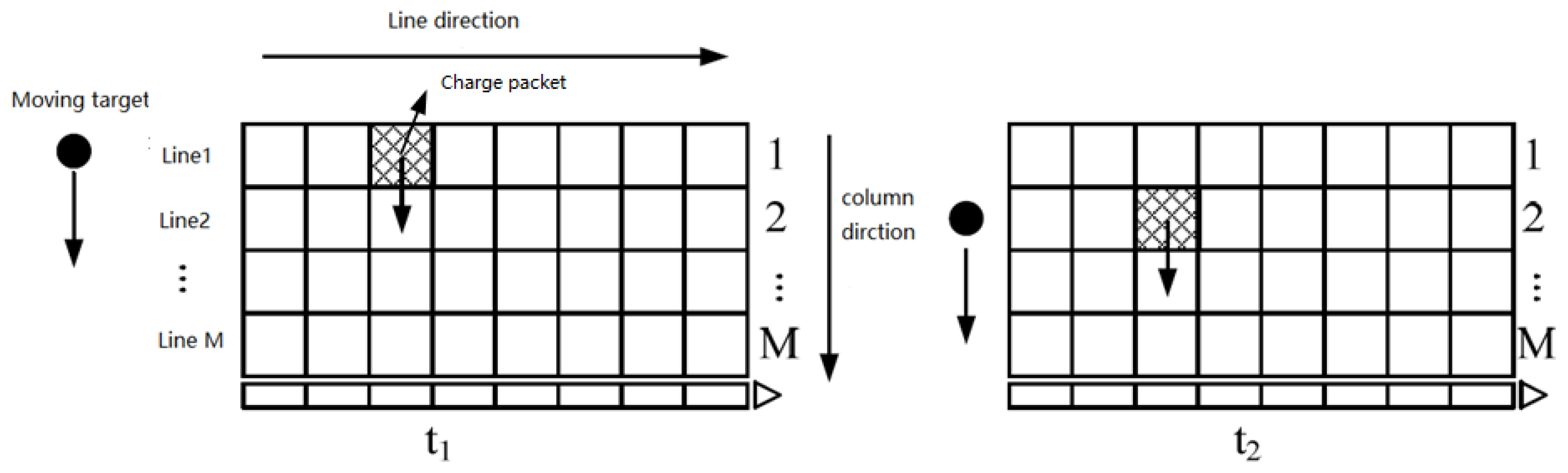
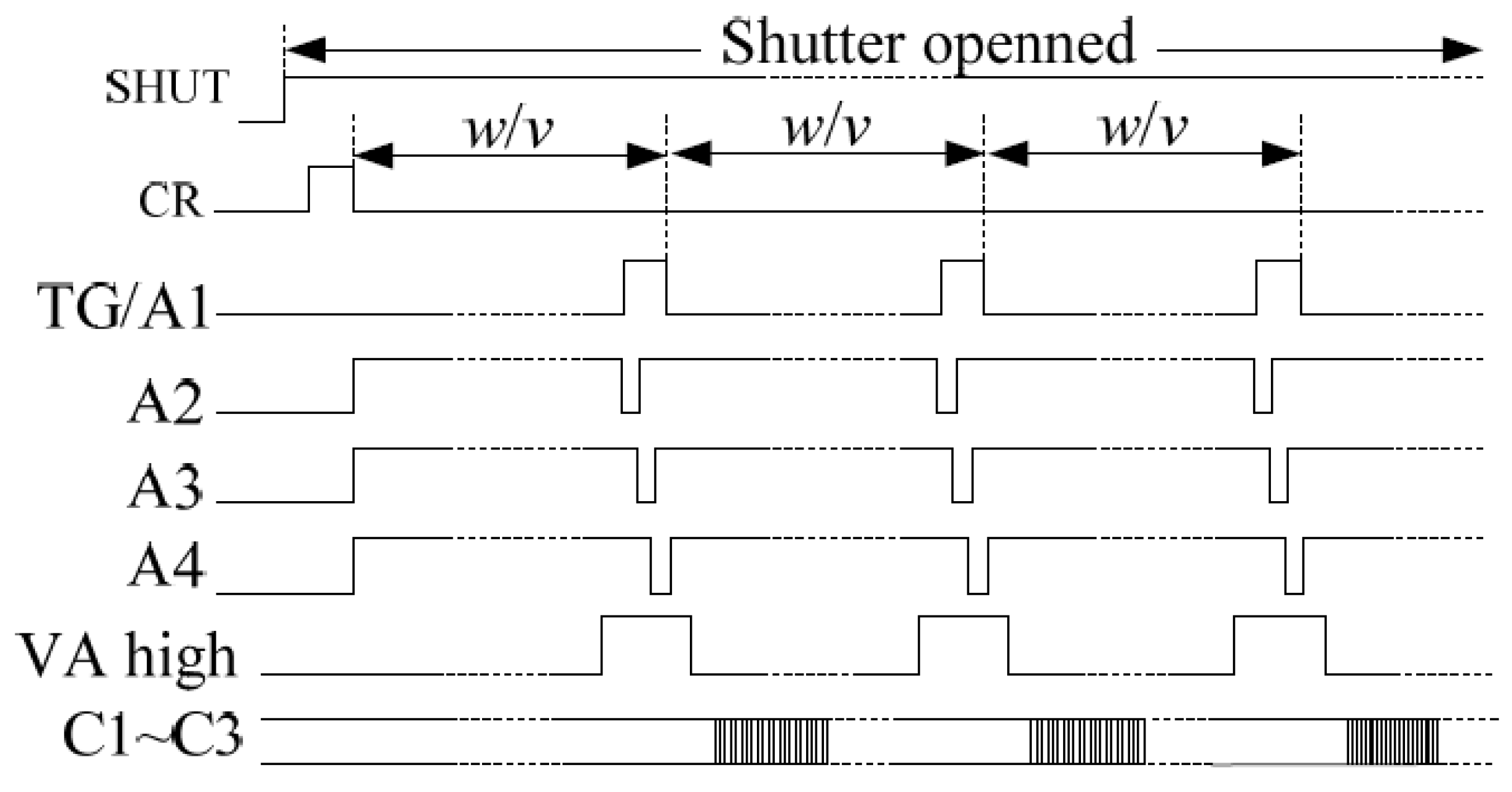
2.1. Generation of Non-Synchronous Effect in the Conventional Electronic Image Motion Compensation (IMC) Method
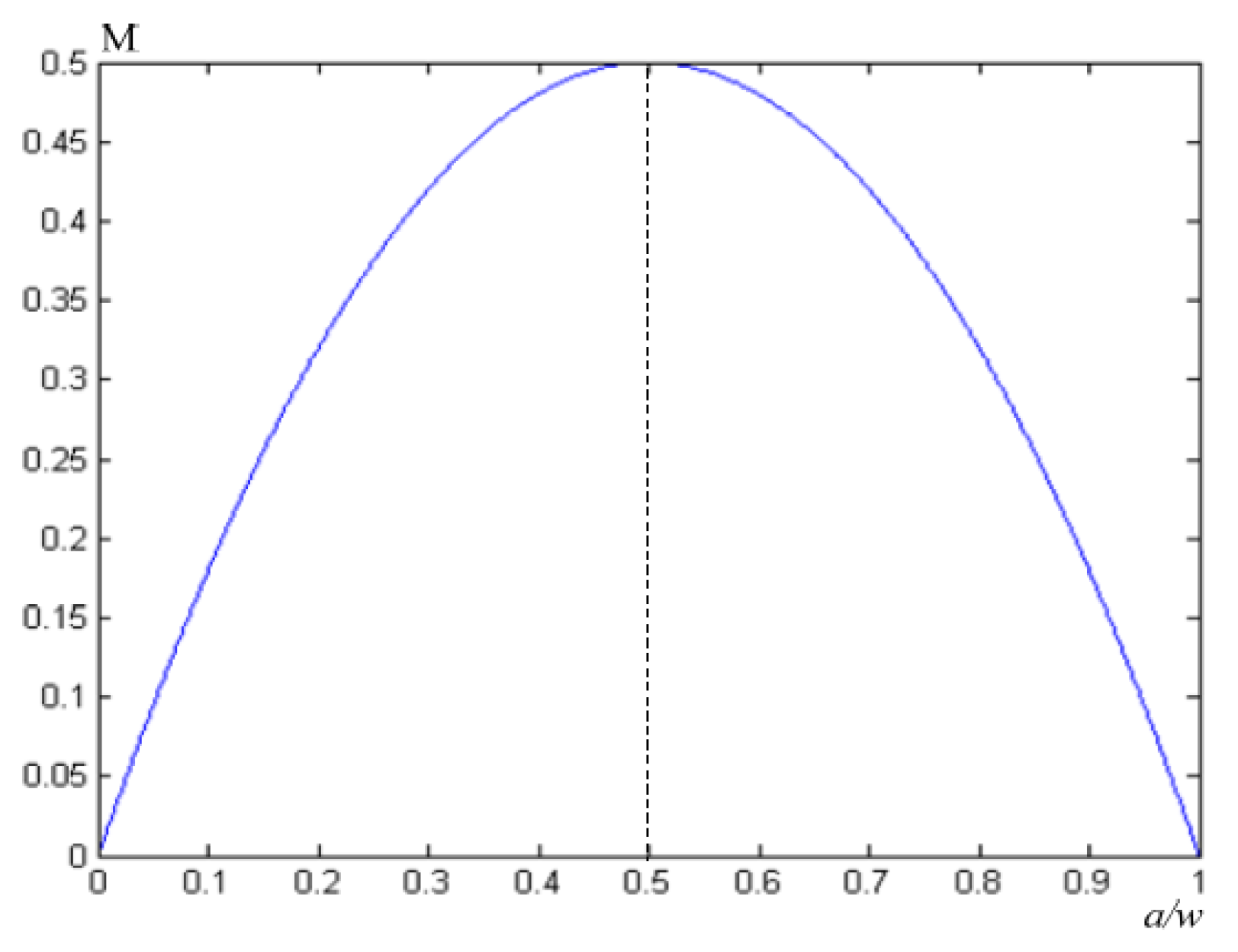
2.2. Analysis of the Conventional Electronic Image Motion Compensation (IMC) Method
3. Improved Electronic Image Motion Compensation (IMC) Method
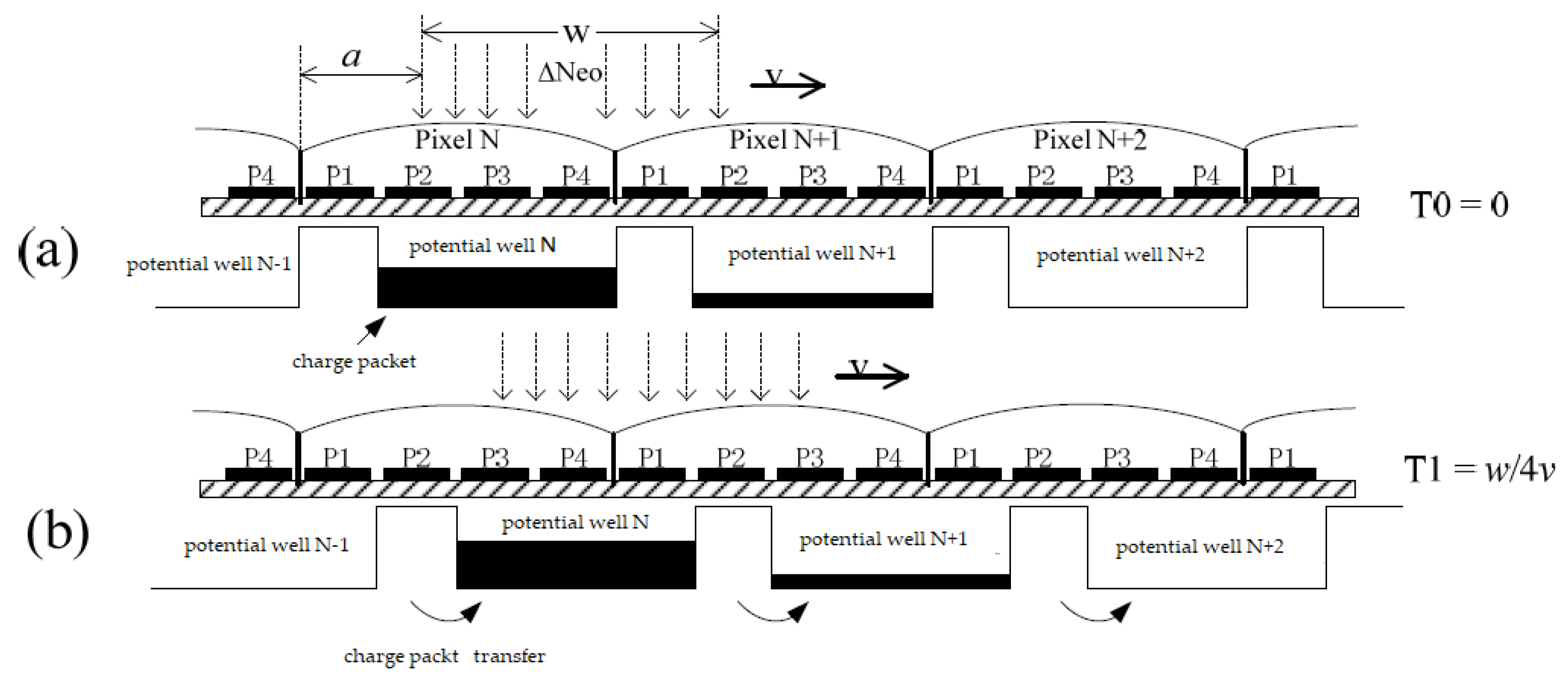
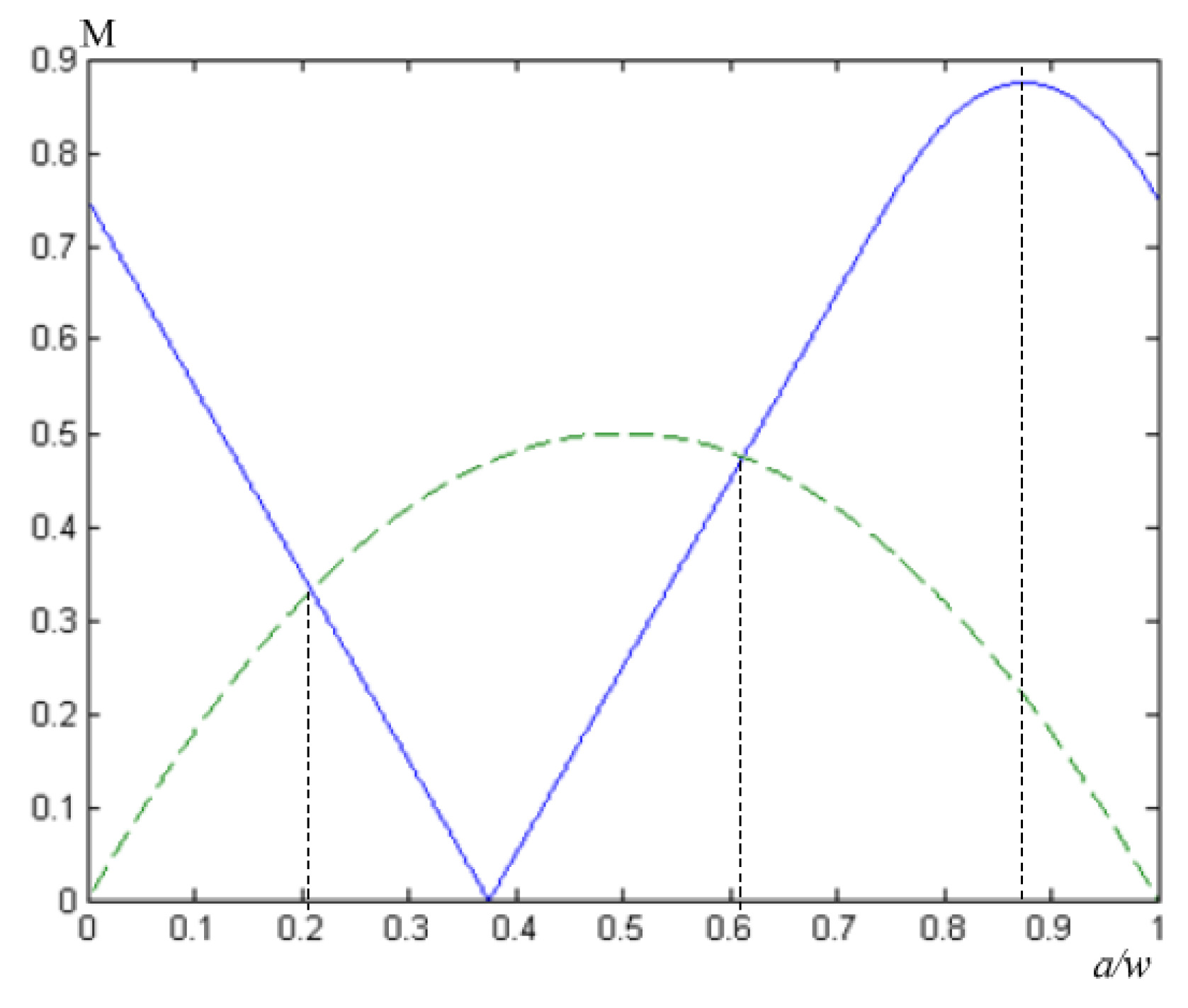
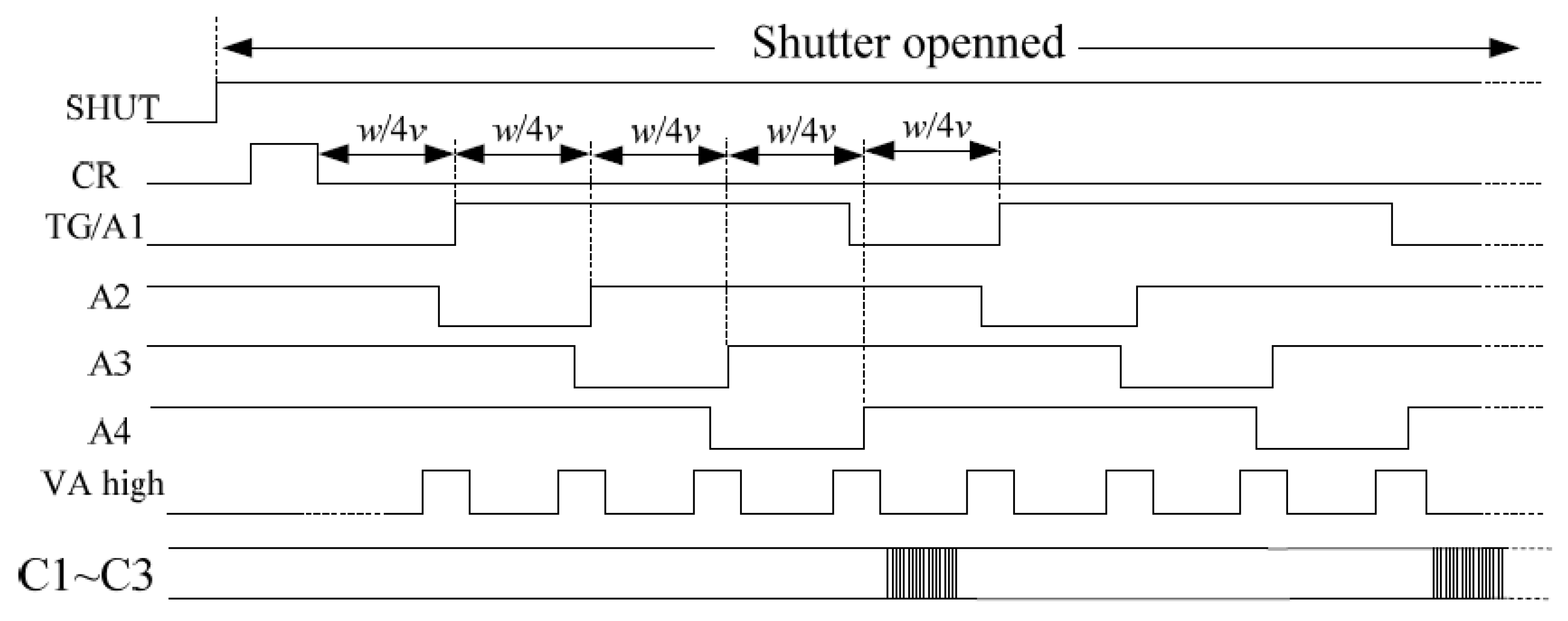
3.1. Analysis of the Improved Electronic Image Motion Compensation (IMC) Method
3.2. Driving Time Sequence Analysis
4. Hardware Implementation of the Improved Image Motion Compensation (IMC) Method
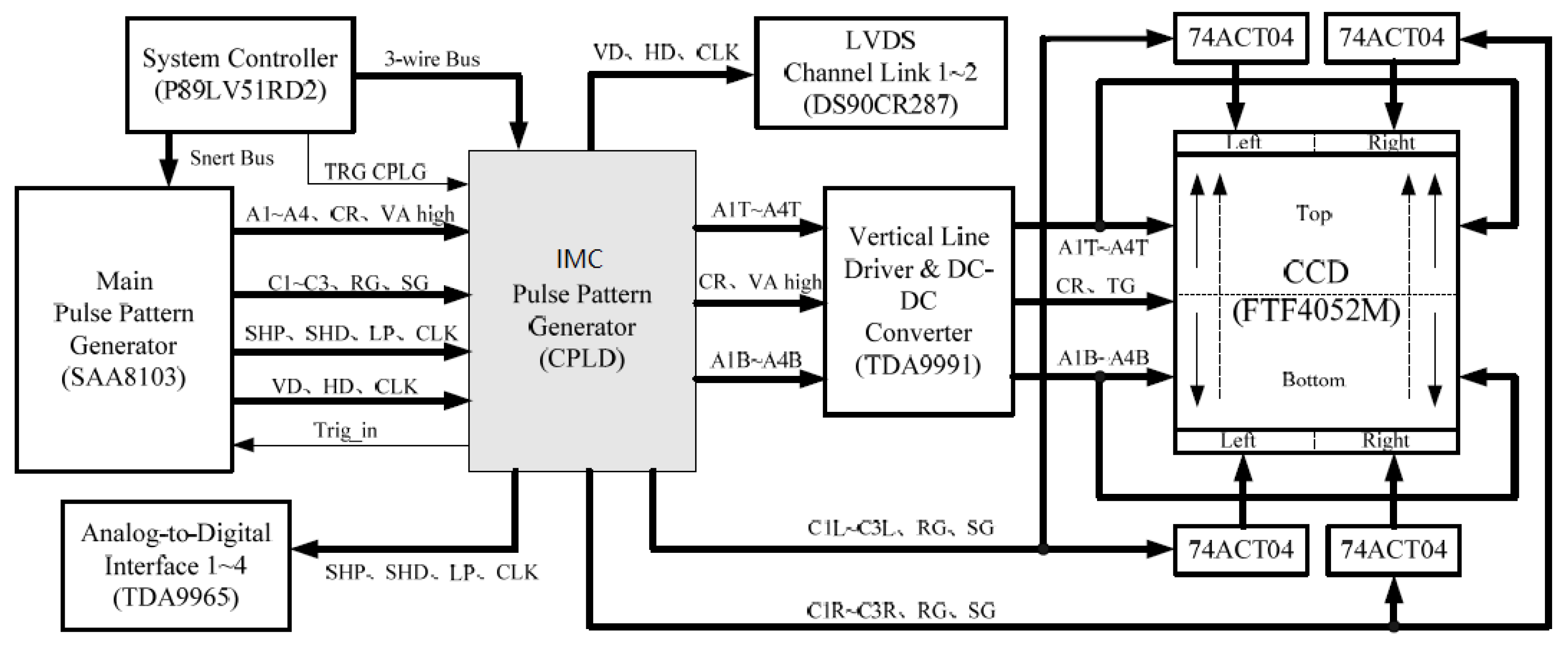
4.1. The Overall Design Scheme of the FTFCCD4052M Drive Circuit System
4.2. The Hardware Implementation of the Improved Electronic Image Motion Compensation (IMC) Drive Circuit
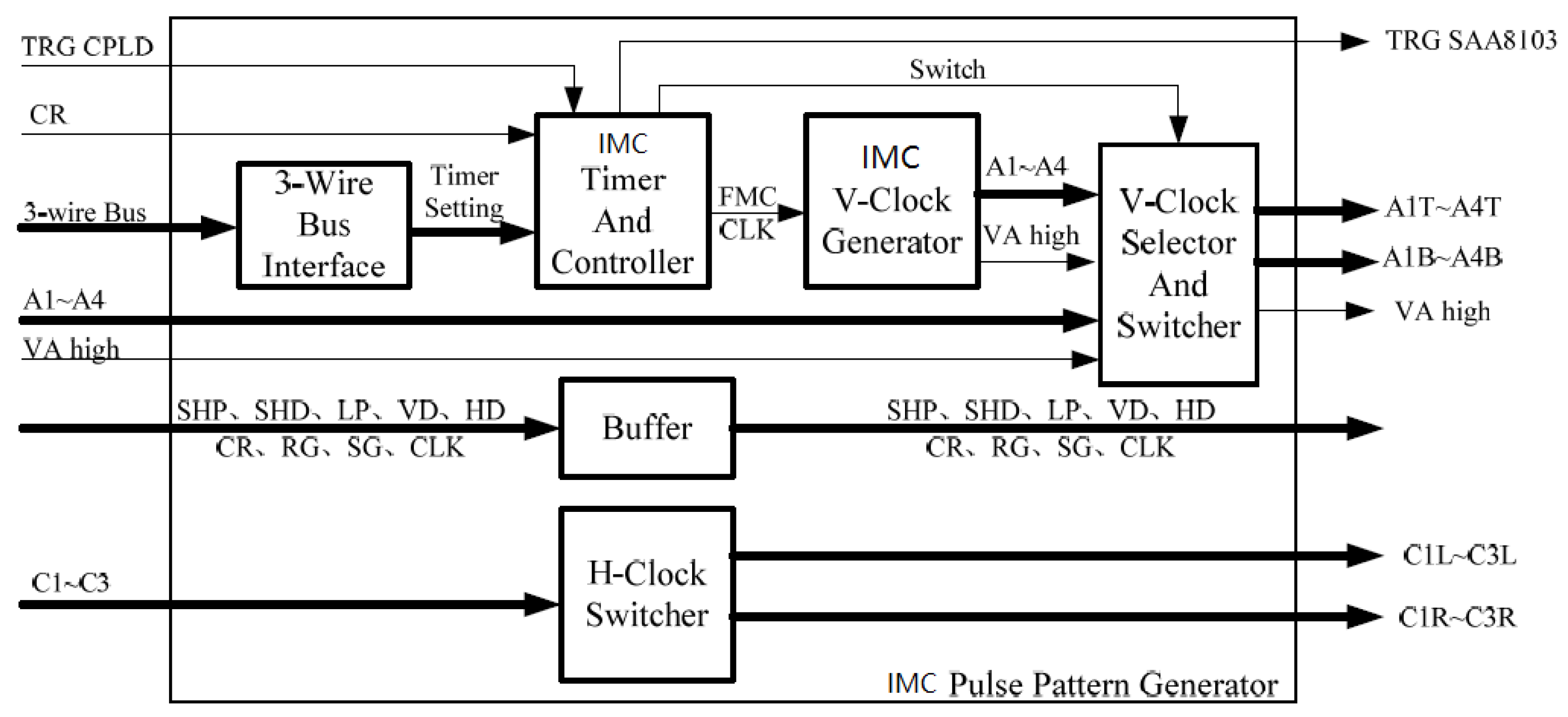
4.3. Design of the IMC Pulse Pattern Generator
- (1)
- Three-wire bus interface: Provide a three-wire bus interface to the receive system. Receive the IMC time setting information that the system controller sends.
- (2)
- IMC timer and controller: Generate the timing pulse with interval w/4v according to the timer setting during exposure, and generate the trigger signal and the timing switch signal of the SAA8103 according to the working status signal;
- (3)
- IMC V-clock generator: Generate the IMC driver timings (A1–A4 and VA high) as shown in Figure 11 based on the timing pulse;
- (4)
- H-clock selector and switcher: Gate the A1–A4 and VA high signals generated by the IMC V-clock generator during exposure. Gate the A1–A4 and VA high signals generated by the SAA8103 during the charge output and idle periods. The gated A1–A4 signals are allocated to A1T–A4T and A1B–A4B, and the phase relationship of each channel is controlled during the allocation process;
- (5)
- H-clock switcher: The horizontal transfer driver timings C1–C3 generated by the SAA8103 are assigned to C1L–C3L and C1R–C3R, and the phase relationship of each channel is controlled during the distribution process.
- (6)
- Signal buffer forwarding module (buffer): Forwards other driver timings generated by the SAA8103.
5. Improved CCD Electronic Image Motion Compensation (IMC) Imaging Experiment
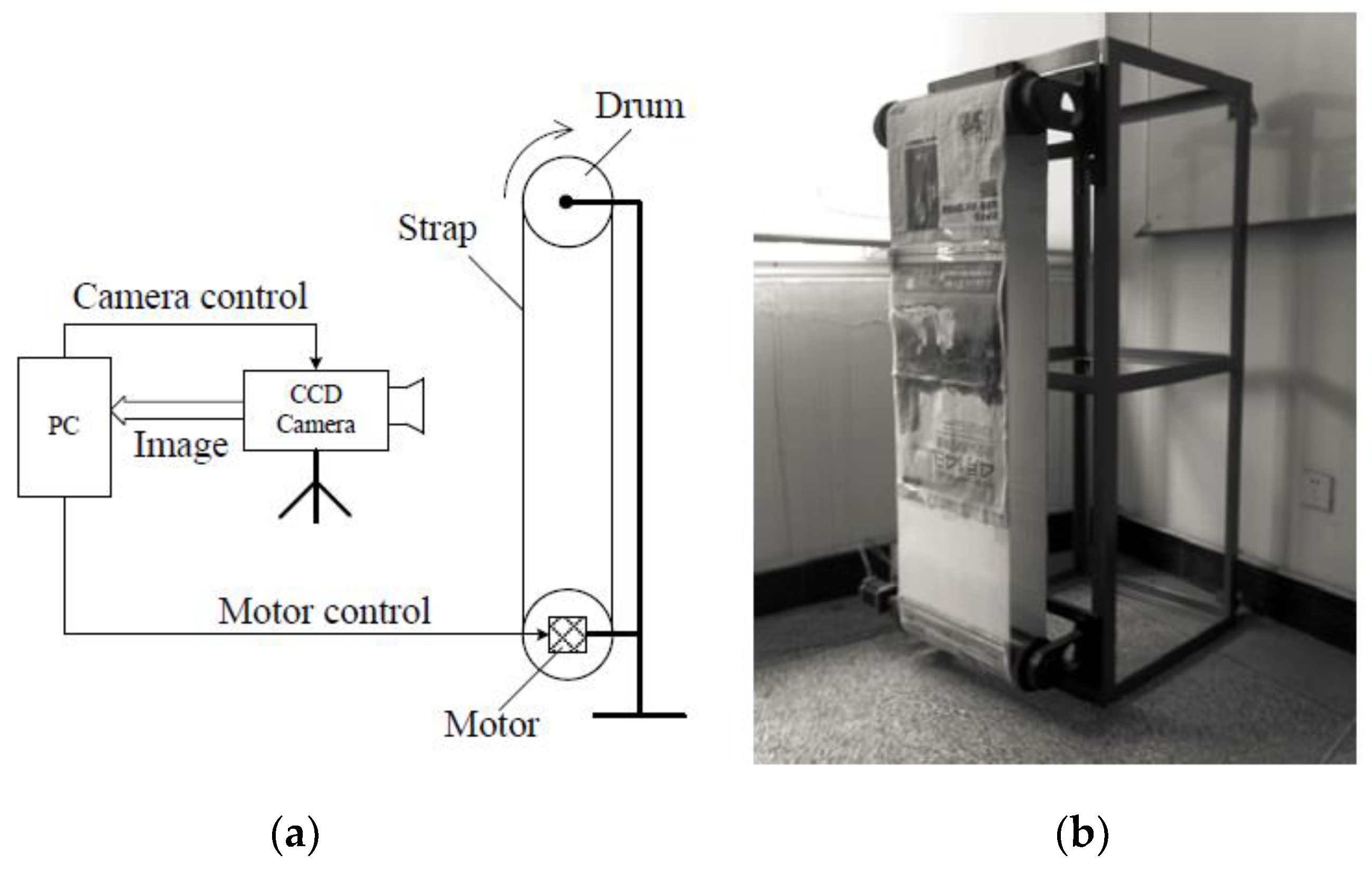
5.1. The Structure of the Experimental Platform
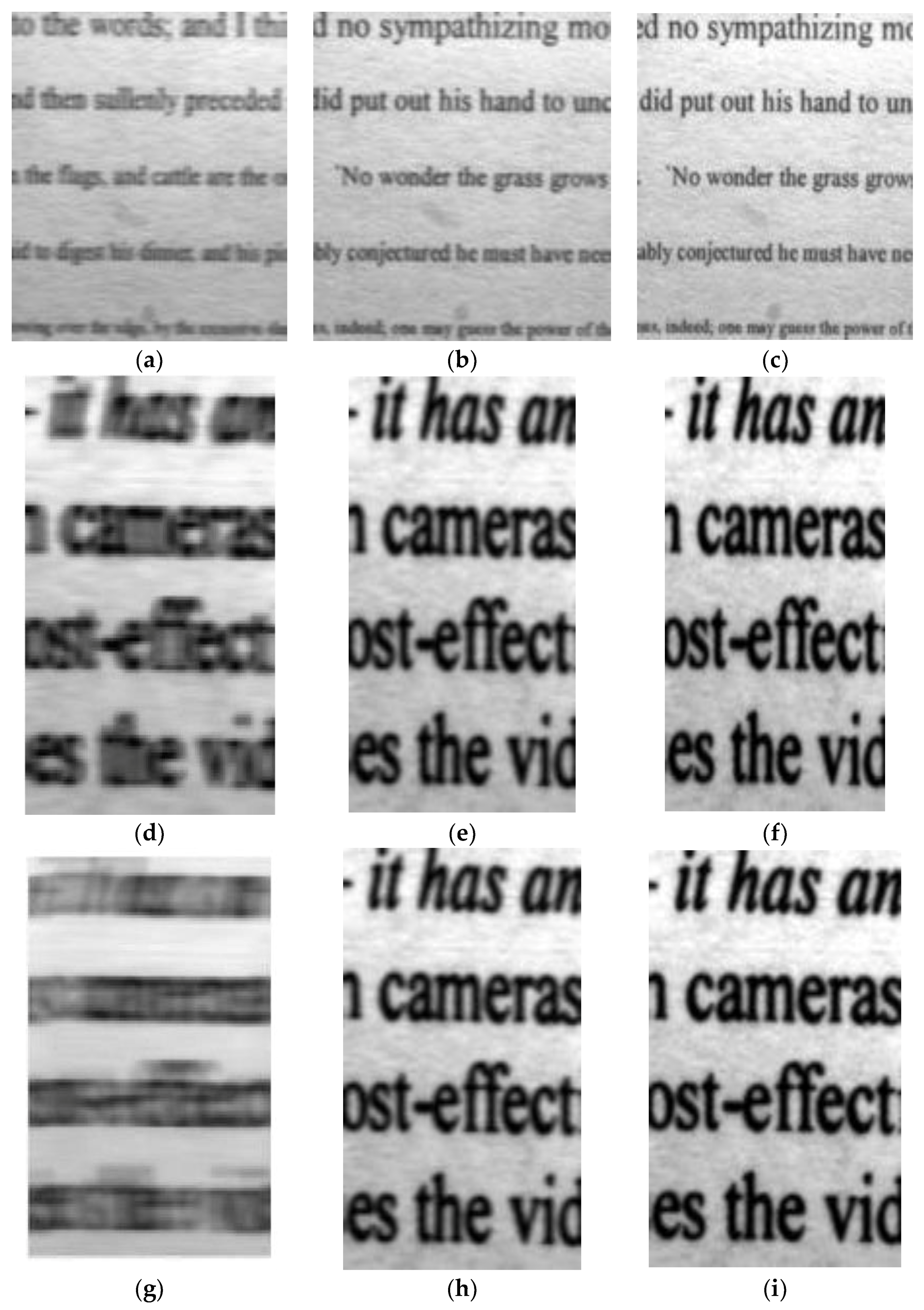
5.2. Analysis of Two Kinds of Electronic Image Motion Compensation (IMC) in Real-Time
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Janschek, K.; Tchemykh, V. Optical Correlator for Image Motion Compensation in the Focal Plane of a Satellite Camera. In Proceedings of the 15th IFAC Symposium on Automatic Control in Aerospace, Bologna, Italy, 2–7 September 2001; pp. 378–382. [Google Scholar]
- Lareau, A.G.; Beran, S.R.; Lund, J.A.; Pfister, W.R. Electro-Optical Imaging Array with Motion Compensation. U.S. Patent 5,155,597, 13 October 1992. [Google Scholar]
- Olson, G.G. Image motion compensation with frame transfer CCDs. Proc. SPIE 2002, 4567, 153–160. [Google Scholar]
- Bosiers, J.T.; Kleimann, A.C.; van Kuijk, H.C.; Le Cam, L.; Peek, H.L.; Maas, J.P.; Theuwissen, A.J. Frame Transfer CCDs for Digital Still Cameras: Concept, Design, and Evaluation. IEEE Trans. Electron. Devices 2002, 49, 377–386. [Google Scholar] [CrossRef]
- Markelov, S.V.; Murzin, V.A.; Borisenko, A.N.; Ivaschenko, N.G.; Afanasieva, I.V.; Ardilanov, V.I. A high-sensitivity CCD camera system for observations of early universe objects. Astonom. Astrophys. Trans. 2000, 19, 579–583. [Google Scholar] [CrossRef]
- Gach, J.L.; Darson, D.; Guillaume, C.; Goillandeau, M.; Cavadore, C.; Balard, P.; Boissin, O.; Boulesteix, J. A new digital CCD readout technique for ultra-low-noise CCDs. Astronom. Soc. Pac. 2003, 115, 1068–1071. [Google Scholar] [CrossRef]
- Gach, J.L.; Darson, D.; Guillaume, C.; Goillandeau, M.; Boissin, O.; Boulesteix, J.; Cavadore, C. Zero Noise CCD: A New Readout Technique. Science Detectors for Astronomy; Springer: Dordrecht, The Netherlands, 2004; pp. 603–610. [Google Scholar]
- Liu, G. Research on Driver Circuit and Analog-Front-End KEY Technology Based on High Frame CCD. Ph.D. Thesis, Institute of Photoelectric Technology, Chinese Academy of Sciences, Chengdu, China, 2008; pp. 2–138. [Google Scholar]
- Liu, G.; Yang, S.; Wu, Q. Design for high resolution CCD camera with high frame rate. Semicond. Optoelectron. 2007, 28, 735–738. [Google Scholar]
- Liu, G.L.; Yang, S.H.; Wu, Q.Z.; Xia, M. Design of high resolution camera system based on full frame CCDs. J. Grad. Univ. Chin. Acad. Sci. 2007, 24, 320–324. [Google Scholar]
- Shang, X.; Zhou, H.; Zhang, X. Design of FPGA-based high frame rate driving circuit for array CCD. Chin. J. Liq. Cryst. Displays 2009, 24, 735–739. [Google Scholar]
- Ning, Y.H.; Guo, Y.F. Real-time image processing in TDICCD space mosaic camera. Opt. Precis. Eng. 2014, 22, 508–516. [Google Scholar] [CrossRef]
- Luo, T.D.; Li, B.K.; Guo, M.A.; Yang, S.H.; Zhou, M. Remote image acquisition system with scientific grade CCD. Opt. Precis. Eng. 2013, 21, 496–502. [Google Scholar]
- Leng, X.; Zhang, X.; Li, W. Image defect of full-frame CCD in TDI mode. Opt. Precis. Eng. 2014, 22, 467–473. [Google Scholar] [CrossRef]
- Zhao, H.J.; Liu, X.K.; Zhang, Y. CCD imaging electrical system of AOTF imaging spectrometer. Opt. Precis. Eng. 2013, 21, 1291–1296. [Google Scholar] [CrossRef]
- Papaioannou, M.; Plum, E.; Rogers, E.T.; Zheludev, N.I. All-optical dynamic focusing of light via coherent absorption in a plasmonic metasurface. Light Sci. Appl. 2018, 7, 17157. [Google Scholar] [CrossRef]
- Samantaray, N.; Ruo-Berchera, I.; Meda, A.; Genovese, M. Realization of the first sub-shot-noise wide field microscope. Light Sci. Appl. 2017, 6, e17005. [Google Scholar] [CrossRef]
- Dean-Ben, X.L.; Razansky, D. Localization optoacoustic tomography. Light Sci. Appl. 2018, 7, 18004. [Google Scholar] [CrossRef]
- Lee, S.; Kwon, O.; Jeon, M.; Song, J.; Shin, S.; Kim, H.; Jo, M.; Rim, T.; Doh, J.; Kim, S.; et al. Super-resolution visible photo activated atomic force microscopy. Light Sci. Appl. 2017, 6, e17080. [Google Scholar] [CrossRef]
- Chang, Z.; Wang, Y.; Si, F.Q.; Zhou, H.; Zhao, M.; Liu, W. Digital binning method for CCD pixels and its applications. Opt. Precis. Eng. 2017, 25, 2204–2211. [Google Scholar] [CrossRef]
- Dong, T.; Ni, J.; Zeng, X.; Kai, B. Signal processing for double objectives to impact simultaneously on single linear CCD vertical target. Opt. Precis. Eng. 2017, 25, 266–273. [Google Scholar]
- Zhi, X.; Zhang, S.; Zhang, W.; Sun, X.; Fu, B. MTF space-variant blurring resulted from platform vibration of TDICCD camera. Opt. Precis. Eng. 2016, 24, 1432–1438. [Google Scholar]
- Liu, L.; Luo, T.; Li, B.; Yang, S.; Yan, M. Smear correction of asynchronous binning high frame rate CCD camera. Opt. Precis. Eng. 2017, 25, 217–223. [Google Scholar] [CrossRef]
- Li, J.; Zhao, J.; Chang, M.; Hu, X. Radiometric calibration of photographic camera with a composite plane array CCD in laboratory. Opt. Precis. Eng. 2017, 25, 73–83. [Google Scholar]
- Lu, P.; Li, Y.; Jin, L.; Li, G.; Wu, Y.; Wang, W. Image motion velocity field model of space camera with large field and analysis on three-axis attitude stability of satellite. Opt. Precis. Eng. 2016, 24, 2173–2182. [Google Scholar]
- Hu, Y.; Jin, G.; Chang, L. Image motion matching calculation and imaging validation of TDI CCD camera on elliptical orbit. Opt. Precis. Eng. 2014, 22, 508–516. [Google Scholar]
- Ren, H. Image motion compensation of full frame focal plane CCD camera based on FPGA. Semicond. Optoelectron. 2011, 32, 740–744. [Google Scholar]
- Liu, Y.; Li, G. Detection and record system of real time for static transfer function of the big visual field TDI CCD camera. Infrared Laser Eng. 2012, 41, 2515–2521. [Google Scholar]
- Zhang, Y.; Wang, W.; Li, G. Real time correction method of smear phenomenon based on interline transfer area CCD. Infrared Laser Eng. 2012, 41, 2515–2521. [Google Scholar]
- Liu, Z.; Quan, X. Calibration of CCD camera’s output non-uniformity linear corrected coefficient. Infrared Laser Eng. 2012, 41, 2211–2215. [Google Scholar]
- Miyata, E.; Natsukari, C.; Akutsu, D.; Kamazuka, T.; Nomachi, M.; Ozaki, M. Fast and flexible CCD-driver system using fast DAC and FPGA. Nucl. Instrum. Methods Phys. Res. 2001, 459, 157–164. [Google Scholar] [CrossRef]
- Kohley, R.; Martin-Fleitas, J.M.; Cavaller-Marques, L.; Hammersley, P.L.; Suarez-Valles, M.; Vilela, R.; Beigbeder, F. CCD camera and data acquisition system of scientific instrument ELMER for the GTC 10-m telescope. Proc. SPIE 2004, 5492, 475–483. [Google Scholar]
- Polderdijk, F. Camera Eleetronies for the mK xn KCCD Image Sensor Family; Dalsa: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Fu, T.; Zhang, L.; Wang, W. Real-time processing of image restoration for space camera. Opt. Precis. Eng. 2015, 23, 1122–1130. [Google Scholar]
- Crisp, R.D.; Humpston, G. Back-illuminated CMOS image sensors come to the fore. Photonics Spectra 2010, 44, 103–110. [Google Scholar]
- Ben-Ezra, M. A digital gigapixel large-format tile-scan camera. IEEE Comput. Graph. Appl. 2011, 31, 49–61. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.H.; Guo, M.A.; Li, B.K.; Xia, J.T.; Sun, F.R. Design of digital EMCCD camera with mega pixels. Opt. Precis. Eng. 2011, 19, 2970–2976. [Google Scholar] [CrossRef]
- Xu, W.; Wu, H. Design of ultra -high resolution CCD imaging systems. Opt. Precis. Eng. 2012, 20, 1603–1610. [Google Scholar]
- FTF4052M (22M Full-Frame CCD Image Sensor) Data Sheet; DALSA Professional Imaging: Waterloo, ON, Canada, 2006.
- Application Note AN09; DALSA Professional Imaging: Waterloo, ON, Canada, 2005.
- SAA8103 (Pulse Pattern Generator for Frame Transfer CCD) Data Sheet; Philips: Amsterdam, The Netherlands, 2001.
- SAA8103 (Pulse Pattern Generator for True Frame CCD) Application Note; Philips: Amsterdam, The Netherlands, 2001.
- Beuvink, M. TDA9991 Layout Evaluation PWB; DALSA Professional Imaging: Waterloo, ON, Canada, 2003. [Google Scholar]
- TDA9965 (12-Bit, 5.0 V, 30 Msps Analog-to-Digital Interface for CCD Cameras) Data Sheet; Philips: Amsterdam, The Netherlands, 2003.
- P89LV51RD2 (8-Bit 80C51 3 V Low Power 64 kB Flash Microcontroller with 1 kB RAM) Date Sheet; Philips: Amsterdam, The Netherlands, 2003.
- Camera Link Specifications of the Camera Link Interface Standard for Digital Cameras and Frame Grabbers, Version 1.1; Automated Imaging Association: Ann Arbor, MI, USA, 2004.
- Milton, A.F.; Barone, F.R. Influence of Nonuniformity on Infrared Focal Plane Array Performance. Opt. Eng. 1985, 24, 855–862. [Google Scholar] [CrossRef]
- Gao, J.; Yao, S.Y.; Shi, Z.F.; Xu, J.T. Realization and optimization of time delay integration in CMOS image sensors. J. Optoelectron. Laser 2007, 18, 1162–1165. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Motion Velocity | No IMC | Conventional Electronic IMC Method | Improved Electronic IMC Method |
|---|---|---|---|
| 0.0015 m/s | 0.3120 | 0.9389 | 0.9867 |
| 0.0009 m/s | 0.4801 | 0.9576 | 0.9945 |
| 0.00018 m/s | 0.6874 | 0.9639 | 0.9989 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, H.; Hu, T.T.; Song, Y.L.; Sun, H.; Liu, B.C.; Gao, M.H. An Improved Electronic Image Motion Compensation (IMC) Method of Aerial Full-Frame-Type Area Array CCD Camera Based on the CCD Multiphase Structure and Hardware Implementation. Sensors 2018, 18, 2632. https://doi.org/10.3390/s18082632
Ren H, Hu TT, Song YL, Sun H, Liu BC, Gao MH. An Improved Electronic Image Motion Compensation (IMC) Method of Aerial Full-Frame-Type Area Array CCD Camera Based on the CCD Multiphase Structure and Hardware Implementation. Sensors. 2018; 18(8):2632. https://doi.org/10.3390/s18082632
Chicago/Turabian StyleRen, Hang, Tao Tao Hu, Yu Long Song, Hui Sun, Bo Chao Liu, and Ming He Gao. 2018. "An Improved Electronic Image Motion Compensation (IMC) Method of Aerial Full-Frame-Type Area Array CCD Camera Based on the CCD Multiphase Structure and Hardware Implementation" Sensors 18, no. 8: 2632. https://doi.org/10.3390/s18082632
APA StyleRen, H., Hu, T. T., Song, Y. L., Sun, H., Liu, B. C., & Gao, M. H. (2018). An Improved Electronic Image Motion Compensation (IMC) Method of Aerial Full-Frame-Type Area Array CCD Camera Based on the CCD Multiphase Structure and Hardware Implementation. Sensors, 18(8), 2632. https://doi.org/10.3390/s18082632