1. Introduction
Noise pollution is a common problem in urban environments. Typical environmental or background noise levels in residential areas range from 30 dB to 80 dB. It has been shown that noise pollution affects people’s health and cognition and long-term exposure to sound levels over 85 dB causes hearing damage [
1]. Studies [
2,
3] investigated effects of exposure to office noise on comfort, symptoms, work performance and showed that everyday exposure to noise disturbance affected negatively comfort, selected symptoms, and self-assessed work performance. Participants were also less likely to make ergonomic, postural adjustments on their computer workstations while working in noisy conditions. The studies also showed that noise may even affect their judgment of the noise exposure.
Noise sensing and measurement are expensive due to the costs of measuring equipment and professional personnel. Wireless Sensor Networks (WSN) represent a promising and ubiquitous alternative to the current expensive noise sensing equipment and complex noise data collection procedures. Each node in WSN could measure the noise level at its location and the data would be collected by a sink node and forwarded to a web-based database. A noise-sensing node has to regularly sample the microphone’s signal at high frequency, an operation that consumes a significant amount of energy for an extended period of time. Consequently, we have two possibilities for further processing:
the node could transmit raw data to the sink, which is usually not feasible due to the memory, energy and network requirements for storing, sending and forwarding all these packets,
the node could process the data and transmit only the value of the sound level to the sink node.
To measure human exposure to noise, A-weighting filters are required. A-weighting is applied to the sound samples in an effort to estimate the loudness perceived by the human ear [
1]. It is defined in the International standard IEC 61672-1 [
4], which describes A-weighting filters, but does not define their implementation details. Most of the previous work [
5,
6,
7,
8,
9,
10,
11,
12] on noise measurement, has been done using an analog A-weighting filter. Usually, such a filter consists of five active stages implemented with operational amplifiers, and requires a significant amount of power.
The main goal of this work is to develop a sensor node for monitoring of indoor ambient sound levels. The sensor network, comprising a few stand-alone and battery-powered sensor nodes placed in different locations, gives us an assessment of sound levels in our home, school or office and helps us to better understand how ambient sound level affects our health, comfort and productivity. The key objectives in the design of a sensor node are cost, battery life and physical size. The node should continuously monitor sound and possibly other ambient parameters for several days without being plugged in the power socket. The key goals for the presented sound level meter are:
implementation of A-weighting filtering on the fly with the magnitude response that satisfies the tolerance limits imposed by IEC 61672-1 standard,
ability to measure the dynamic range of at least 60 dB and the sound pressure level up to 100 dB,
low power consumption and price under 50 EUR.
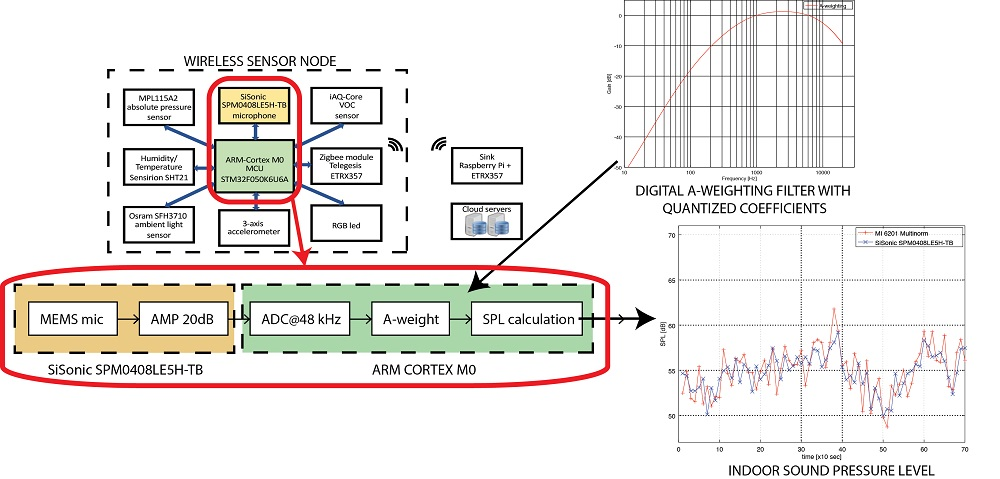
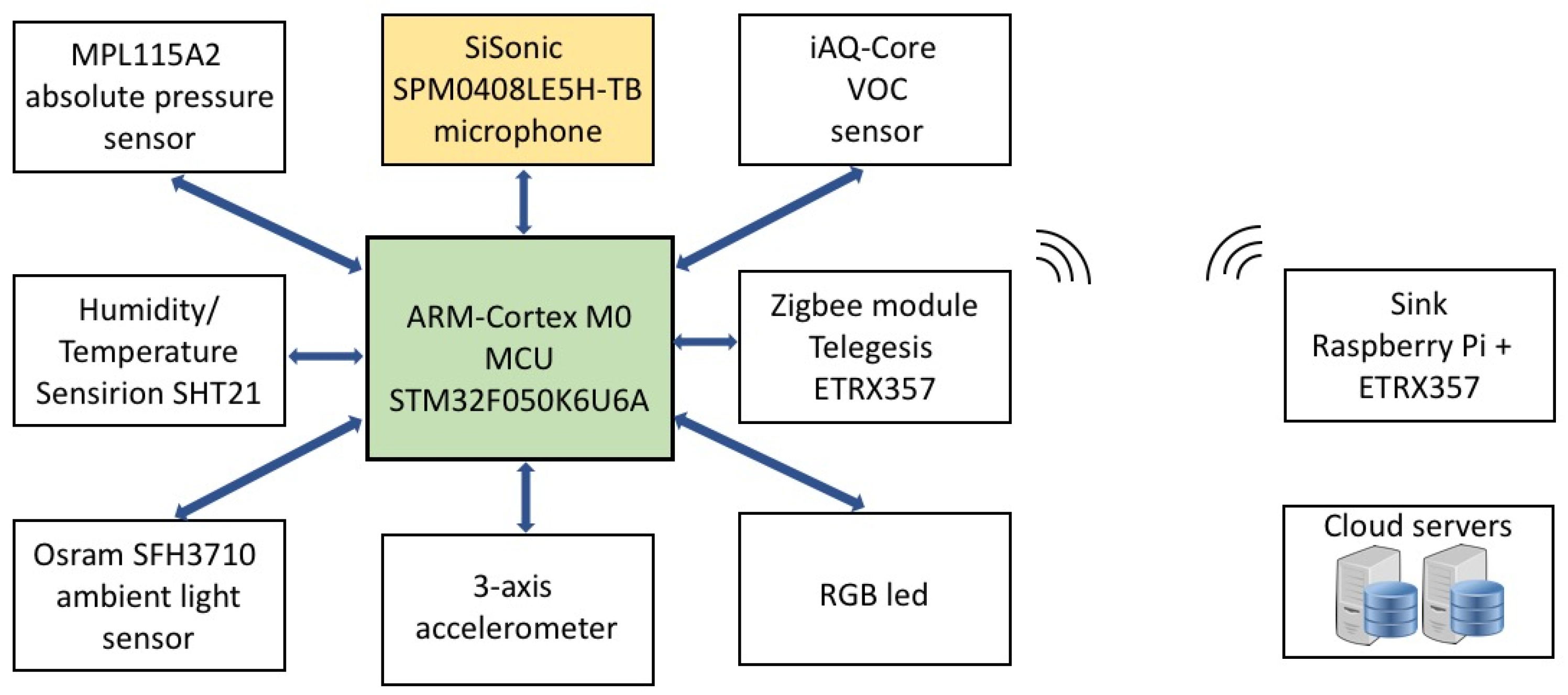
As a solution to aforementioned goals, we present an accurate sound-level meter, which is a part of the low-power and low-cost wireless sensor node. Therefore, it is based on the ARM Cortex-M0—the smallest and the cheapest ARM processor core. For wireless communication with a gateway (sink) node, we use IEEE 802.15.4 compatible transceiver and the ZigBee protocol. As the node has limited processing abilities, we propose several simplifications to approximate costly signal processing stage and still accurately measure the sound level at the node. Furthermore, to reduce the communication between the sensor node and the sink node, as well as the power consumed by the ZigBee transceiver, we perform digital A-weighting filtering and non-calibrated calculation of the sound pressure level on the node itself, and consequently, send only the final value to the sink.
This paper presents the following primary contributions:
implementation of an accurate indoor sound level meter on the smallest ARM core,
magnitude response of the proposed A-weighting filter satisfies the tolerance limits imposed by IEC 61672-1 standard, despite the coefficient quantization,
complete implementation of the proposed A-weighting filter on a sample-by-sample basis using only integer calculations,
low power consumption of the implemented sensor node, which allows battery-powered operation for several days,
mean difference between the proposed SLM and the Class 1 SLM is less than 2 dB on two experimental 12-min recordings.
Our work differs from the previous ones since our goal is to measure indoor sound level on a small, low-cost and low-power wireless sensor node with limited computational resources. Therefore, we propose a hardware platform for noise assessment based on the wireless sensor node and address the corresponding signal processing challenges. In addition, we have studied and implemented necessary signal processing algorithms required to perform the calculations. The implementation of signal processing algorithms has been adapted to the proposed hardware platform with limited computational resources. To further present the details about our work, we provide all the necessary equations and the resulting quantized filter coefficients. We also propose several simplifications to approximate a more complex and costly signal processing stage in order to assess the sound level with best possible accuracy.
This paper is organized as follows.
Section 2 discusses related work.
Section 3 provides sound level measurements basics and introduces the proposed digital A-weighting filter. In
Section 4, the design and implementation of a low-power and low-cost sensor node for accurate sound-level measurement are described. Experimental results and calibration of the proposed device for sound level measurement are summarized in
Section 5. Finally, the paper is concluded in
Section 6.
2. Related Work
As already mentioned, one of the most promising technologies in the field of ambient sensing are Wireless Sensor Networks (WSN). Wireless sensor networks allow for accurate measuring of environmental pollution, spatially and temporally, and distributing this information to the public [
13]. Furthermore, Dauwe et al. [
14] present a multi-layered middleware platform for sensor networks, which offers data aggregation, control and management mechanisms. Di Francesco et al. in [
15] provide a comprehensive taxonomy of the WSN architectures, present an overview of data collection process, and identify corresponding issues and challenges. Their research also provides an extensive survey of the related literature and hints to open problems and future research directions. Reis et al. [
16] have outlined several developments within environmental sensing that offer new opportunities for data-intensive modeling for environmental and human health.
Wireless sensor networks for noise pollution monitoring are presented by Santini et al. [
8] and Filipponi et al. [
9], but these solutions do not perform signal processing in the sensor nodes. Instead they use dedicated hardware for noise measurements. However, no information has been given about implementation details. In addition, Wilson and Jarvis [
10] describe a WSN for noise measurement which uses energy harvesting, but does not use frequency weighting. On the other side, Hakala et al. [
5] and Kivelä et al. [
6,
7] present a design of a WSN for acoustic noise measurement in more details. However, in order to reduce the computational complexity, an analog A-weighting filter is used. The authors’ opinion is that a digital filter involves excessive floating-point calculations, which definitely surpasses the limit of a small of-the-shelf integer-based MCU. Consequently, they implement A-weighting filter with a cascade of three analog high-pass filters plus two analog low-pass filters.
Segura-Garcia et al. in [
11] evaluate Tmote-Invent and Raspberry Pi nodes for urban noise pollution monitoring. The proposed nodes record the sound sequence, which prevents the implementation of the sound-level measurement on small low-power processors. Besides that, the study in [
11] does not give more details on the filter or signal processing procedure used. The further work of Segura-Garcia et al. in [
12] describes a distributed noise monitoring system and the practical application of a geo-statistical methodology for statistical spatial-temporal prediction of noise levels in semi-open areas, such as in a typical, small Mediterranean city. The authors in [
12] also developed geo-statistical time model that allows the estimation of specific noise levels and characterization of the spatial-temporal variation of the noise pollution. The results confirm usability of the model as a good approximation of the experimental measurements.
Recently, mobiles phones emerged as a potential solution for the participatory noise monitoring; this approach was proposed by D’Hondt et al. in [
17] and Kanjo in [
18]. However, processing capabilities and power consumption of smartphones far exceed that of sensor nodes, which does not make them a viable solution for long-term noise pollution monitoring. However, ad-hoc short-term participatory measurements can be easily performed, but first we need to evaluate accuracy and efficiency of these platforms. Kardous and Shaw in [
19] report on the accuracy of smartphone sound measurement applications on both the Android and the iOS operating systems. The authors generated pink noise in 20 Hz to 20 kHz frequency range, at levels from 65 to 95 dB in 5 dB increments. The study showed that certain sound measurement applications for Apple smartphones and tablets may be considered accurate and reliable enough to be used to assess noise levels, while Android and Windows applications were at that moment not accurate enough for noise assessments. Nast et al. in [
20] compared the accuracy of smartphone applications used to asses the band-limited noise level to measurements made using a calibrated sound-level meter. This study showed that most mobile applications reported higher sound levels.
In the most recent study, Zamora et al. in [
21] proposed the accurate noise assessment procedure using smartphones. They focused on the sound capture and processing procedure, analyzing the impact of different noise calculation parameters and algorithms. They have performed a series of experiments to determine the optimal procedure in term of accuracy when compared to a professional noise measurement unit. The authors implemented and compared three different algorithms used to obtain noise levels with A-weighting, showing that both the sampling rate and the selected buffer size can have a significant impact on the accuracy of noise level measurement. The obtained experimental results show that it is possible to measure noise levels using smartphones with the accuracy comparable to professional devices.
The study in [
22] by Alsina-Pages et al. describes the possible design of an acoustic low-cost sensor network installed on public buses to measure the traffic noise in the city in real time. The authors do not provide any implementation details, but they plan to implement the sensor network for noise measurement in the near future. Before the implementation they address several most important challenges: (a) signal processing algorithms; (b) the bus engine noise and its contribution to the noise map; (c) the selection of the best bus routes for the measurements and the proper creation of the noise maps in the cloud from ubiquitous acoustic data; and finally, (d) the selection of the appropriate low-cost and low-power consumption platform, but with enough computational capacity to implement the necessary signal processing and communication algorithms to perform the measurements and afterwards send them to the cloud.
Noriega-Linares and Ruiz in [
23] describe the prototype of an acoustic sensor based on the Raspberry Pi platform for the analysis of the sound field. The device is also connected to the cloud to share results in real time. The computation resources of the Raspberry Pi allow sampling the high quality audio for calculation of various acoustic parameters. The Raspberry Pi has a powerful computing core—as such it cannot be considered as a low-power platform. Therefore, it is less appropriate for a low-cost and low-power sensor node with limited power supply. The pilot test in this study has also served as an indication tool for the inhabitants of the neighborhood to be more aware of the noise in their environment.
Mydlarz et al. in [
24] present the design and experimental measurements using a low-cost MEMS microphone. The measurements performed in this study show that analog MEMS microphone solution is suitable for accurate urban acoustic monitoring. The sensing device is based on the Tronsmart MK908ii board running Ubuntu Linux. In the proposed prototype system the Knowles SPU0410LR5H-QB analog MEMS microphone is used. The microphone has a flat frequency response between 100 Hz and 10 kHz. The device is used to monitor outdoor urban noise in the city of New York. The proposed device utilizes a constant connection to a 120 V mains supply via a domestic power outlet. This work also proposes three general categories, according to sensor functionality and cost: dedicated monitoring stations, moderately scalable sensor networks, and low-cost sensor networks. The presented solution in this article belongs to the third category, which typically consists of custom made nodes designed to be inexpensive, low-power and autonomous for large scale deployments. The majority of these devices utilize low-power single board computing cores and low-cost audio hardware with an effective range from 55 to 100 dB at 3 dB accuracy when compared to a Class 1 sound level meter. The price point of 150 USD per sensor node in this category makes it a viable solution for pervasive network deployments.
Blythe et al. in [
25] presented the MESSAGE project and introduced a sensor node prototype for temporal and spatial urban (traffic) monitoring. The node includes a low-power PIC18F4620 MCU, a GPS module, a 3-axis accelerometer, a digital temperature sensor, a chemical sensor, a traffic sensor and an acoustic noise sensor. The sensor uses a low power Zigbee radio for communication with gateway nodes, which transfer data to a server. Unfortunately, the paper lacks any further details about the acoustic noise sensor part; however, the authors reported that good agreement (within 3 dB) was verified in the range 55–100 dB. Much more details about the same acoustic sensor node can be found in [
26] by Bell and Galatioto. In addition, the authors present several practical deployments of up to 50 sensors (called “motes”) that were used to implement pervasive networks with the aim to improve the understanding of noise in urban environments and street canyons.
The study [
27] aimed at getting the overall impression of the acoustic climate of living rooms in nursing homes. There is evidence that too loud sound-scape quality more generally can affect negatively the quality of life of people with dementia and increase agitation. The study aims to use the sound-scape approach to enhance the quality of life as well as improving the everyday experience of nursing homes. The sound levels were monitored during daytime in nine living rooms in five nursing homes, but the authors did not mention which sensor nodes were used in their project. Nevertheless, we believe that the device presented in this paper can be effectively used in sound level monitoring in (nursing) homes and can help to enhance the quality of life and working conditions.
3. Sound Level Measurement Basics
The human auditory system responds to air pressure changes, which are perceived as sound. Therefore, in order to quantify the sound level, it is convenient to measure the pressure of the sound wave at the location of the listener. The sound pressure level is computed as the root-mean-square (RMS) value of the sound pressure,
, relative to the reference pressure
and expressed in decibels [
28]:
Reference value
is chosen to be approximately the threshold of hearing at 1000 Hz, for a typical human ear. The effective sound pressure is the RMS value of the instantaneous sound pressure
p over a given interval of time. The RMS value of the sound pressure is defined as
Since root mean square computation in Equation (
2) involves time averaging, three values for the time constant
T are adopted in sound level measurements, namely: impulse (I), fast (F), and slow (S) averaging with time constants equal to 35 ms, 125 ms, and 1 s, respectively [
28]. Analog sound level meters use exponential averaging with the above time constants. On the other hand, digital sound level meters usually use linear averaging with integration times twice as long as the corresponding time constants in the analog case [
29]. In this paper, a digital sound level meter design with fast (F) time linear averaging is presented. Therefore, the integration time is 250 ms. This value is chosen in order to enable monitoring of temporal variations of the sound level being measured.
The sound pressure level is an objective measure of the sound level. However, humans perceive sounds in a subjective manner and perceived sound loudness depends on the sound level, frequency bandwidth, spectral content, information content, as well as the duration of exposure to the sound. Therefore, it is considerably harder to quantify. Basics of loudness measurements have been established in the work of Fletcher and Munson [
30]. Studying the relationship between sound level and loudness for tones of various pitches, Fletcher and Munson came to the set of equal-loudness contours showing the intensities of tones of different frequencies that are perceived to be equally loud by the average listener. Acoustical Society of America developed the first standard for sound level meters (American tentative standards for sound level meters for measurement of noise and other sounds Z24.3-1936) based on the Fletcher and Munson curves. To take into account the impact of frequency to human perception of loudness, the IEC 61672-1 standard [
4] for sound-level meters defines three types of frequency weighting: A, C, and Z. The frequency weighting A is mandated for all sound-level meters, C-weighting is required for sound level meters conforming to class 1 tolerance limits, and Z-weighting is optional.
Although there is criticism that A-weighting is not well correlated with human perception of loudness [
31], it is legally required in many countries and enables comparison of measurement results with historical data. Therefore, it is the frequency weighting adopted for sound level meter design presented in this paper. However, it should be noted that the other frequency weightings could be easily implemented following the described approach.
The A-weighting filter [
1,
4] is a bandpass filter whose frequency response (
Figure 1), defined for frequencies in the audible range (20 Hz to 20 kHz), emphasizes the frequency band from 1 to 4 kHz since humans are most sensitive to noise-induced hearing loss in that range. The transfer function of an analog A-weighting filter is defined in [
4] as
After the measured signal has been filtered with the A-weighting filter defined in (
3), its root mean square value is computed and the obtained value of sound level is reported in decibels, denoted as dBA.
5. Results and Calibration
To investigate the suitability of the presented platform to be used as indoor noise pollution sensor, we deployed the sensor nodes in two different indoor locations and performed 12-min noise measurements sessions and compare it with the Type I sound meter. Before setting up the noise measurements sessions, we performed a calibration to avoid the misalignment in the measured parameters due to the mismatched microphones’ sensitivities and frequency responses. These results, along with detailed node power consumption, are described in the following subsections.
5.1. Calibration
We have generated sound sine waves at 31.5 Hz, 63 Hz, 125 Hz, 250 Hz, 500 Hz, 1 kHz, 2 kHz, 4 kHz, 8 kHz, 12 kHz and 16 kHz. For each sound wave we set different sound pressure levels: 50 dB, 56 dB, 60 dB, 70 dB, 80 dB and 100 dB. These sound pressure levels were set with MI 6201 MULTINORM, using 125 ms time averaging. Then we measured sound pressure levels using the sensor node. The sensor node and its microphone pick-up point were very close to the MI 6201 MULTINORM sound meter, approximately 1 m away from the sound source.
Figure 10 shows the non-calibrated SPL values for various frequencies of sound waves obtained with the sensor node versus MI 6201 MULTINORM references. The results show that the sound pressure levels were lower than sound pressure levels obtained with the MI 6201 MULTINORM sound meter. We can also observe a slight nonlinearity due to poor quality of the used microphone and overall acoustic transfer function of the sensor node and its housing.
To reduce the error we need to calibrate the sensor nodes. Calibration was done with MI 6201 MULTINORM, which is a universal all-in-one instrument for measurement of air temperature, air velocity, relative humidity, illuminance, luminance and includes Class 1 (Pro Set) sound level meter with two independent measuring channels compliant with IEC 61672 standard. Each channel can be set with different time and frequency weighting. The calibration acoustic source must be 1 kHz sine wave [
4]. Using the measurement data from
Figure 10 in the range of [50, 100] dB we obtained a polynomial fitting as:
where
is non-calibrated value of the sound pressure level obtained by the sensor node. The measured and calibrated SPL are depicted in
Figure 11.
5.2. Indoor Accuracy Tests
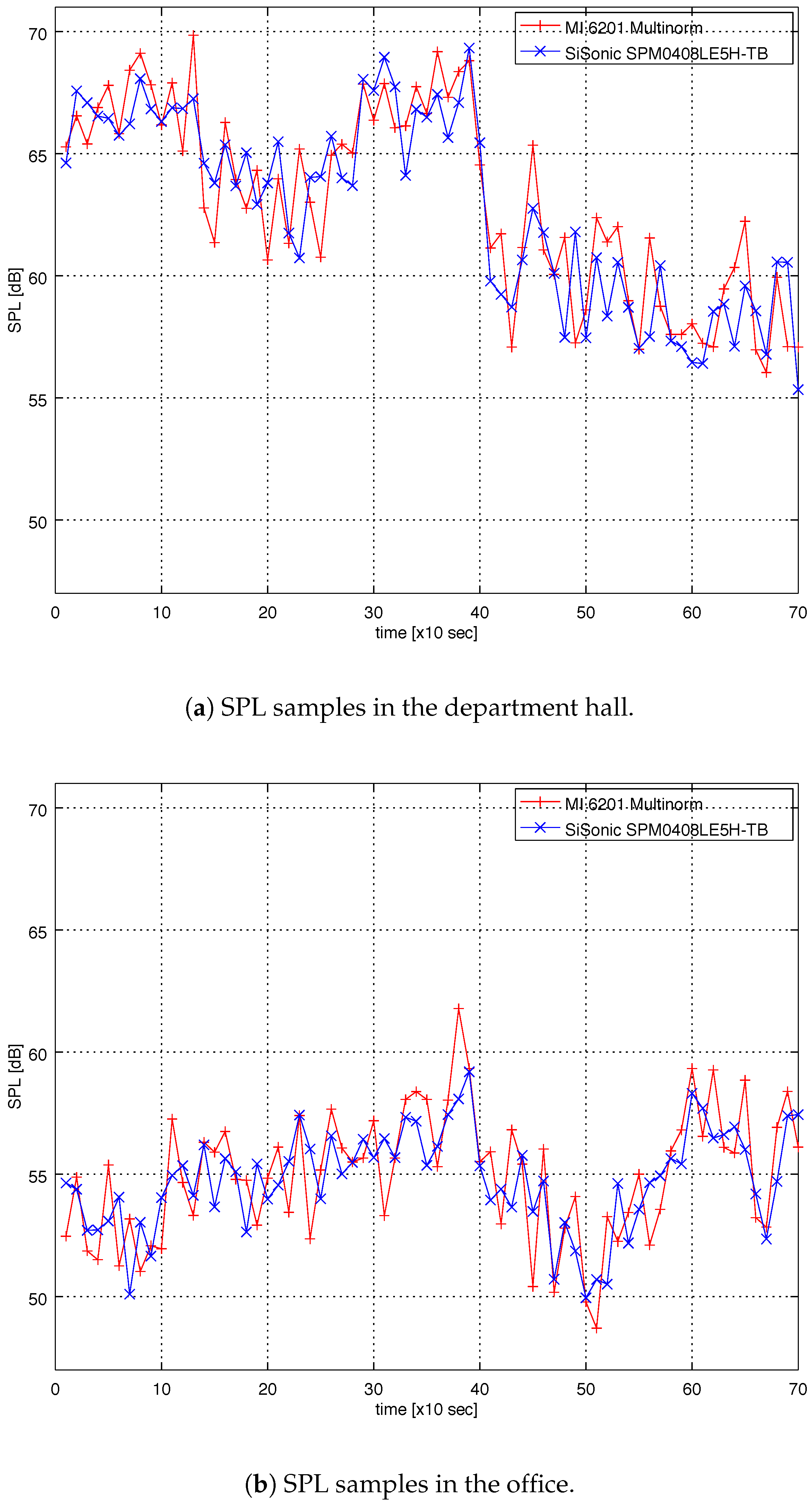
To assess the ability of the proposed sensor node to capture meaningful sound pressure level data, a 12-min indoor audio monitoring was conducted in two different indoor locations: the university department hall during a break between lectures, where a large number of students transfer between lecture rooms and hang out with each other, mainly during the pause between lectures; and the office at the university with six (6) researchers. Audio monitoring was conducted using both the proposed sensor node and MI 6201 MULTINORM in 10 s intervals. The history data collected from both devices are shown in
Figure 12a (department hall) and
Figure 12b (office).
Both recordings include numerous impulsive events (door closure, conversation, moving chairs, etc.). As can be seen from
Figure 12a,b, the proposed sensor node closely follows the measurements made by MI 6201 MULTINORM. It should be emphasized that, although both sensors record samples in 10 s intervals, they do not necessarily record samples at the same time.
To assess the correlation between the measurements made with two different devices, the Pearson’s correlation coefficient was calculated for the 12 min interval. The value for the correlation coefficient is 0.88, which indicates a strong correlation between the signals. The mean difference between two devices for the both 12-min measurements is 1.6 dB.
The cumulative distribution functions of samples are shown in
Figure 13a (department hall) and
Figure 13b (office). To compare cumulative distribution functions (CDF) of two empirical samples we have performed a 2-sample Kolmogorov-Smirnov test. The Kolmogorov-Smirnov test quantifies a distance between the empirical distribution functions of two samples. It returns a D statistic (the maximum vertical distance between the two empirical cumulative distribution functions) and a
p-value corresponding to the D statistic. If the D statistic is small or the
p-value is high, then we cannot reject the hypothesis that the distributions of the two samples are the same. Usually, we can reject the null hypothesis if the
p-value is less than 0.05. In other words, for an identical distribution, we cannot reject the null hypothesis if the
p-value is high. For the CDTs from
Figure 13a we obtained
and high
p-value = 0.75053. For the CDTs from
Figure 13b we obtained
and high
p-value = 0.47271. As both D statistic are small and both
p-values are high, we cannot reject the hypothesis that the distributions are the same.
5.3. Power Consumption
Real-time power consumption was measured using a LeCroy WaveRunner 204xi, 2 GHz, 10 Gs/s oscilloscope. A sensor node and a 1 Ohm, 1% Manganin shunt resistor were connected in series and the voltage over this resistor was measured. The sensor node stays in sleep mode until it is awaken by the 3-axis accelerometer or the timer. The timer wakes the sensor node every 2.3 s to read the VOC sensor. Regular dummy reads of VOC sensors are required by sensor’s specifications. The sensor node is also awoken every 10 s (this time can be changed according to the application’s requirements) to read all sensors and to send data to the sink. The sensor node can be also awaken at any time by shaking it. In this case the sensor node reads all sensors and sends data to the sink.
The sensor node’s current consumption in sleep mode while regularly reading the VOC sensor is presented in
Figure 14.
The peak current while reading the VOC sensor is 20.8 mA. Average power consumption in this operation is 2.7 mA.
The sensor node’s current consumption when reading all sensors and sending data to sink is presented in
Figure 15. It includes two different phases. In the first phase the RGB LED glows for two seconds indicating that the sensor has been awaken. In the second phase RGB LED is switched off and it lasts for around 3 s (it depends on network communication). Immediately after awakening, all sensors are read, then the Zigbee radio is turned on and data is sent to sink. Reading the sensors and establishing the connection with sink start during the first phase and the end of communication with sink terminates the second phase.
In the first phase the current is 40.0 mA (with a peak of 60 mA when reading VOC), while in the second phase the current is 21.6 mA. High current consumption in the first phase is due to RGB LED glow, which consumes about 20 mA. Averaging over the time, the power consumption in this mode of operation is 14.5 mA. The total average power consumption is thus 17.2 mA. The total power consumption can be decreased to 13.5 mA, if we keep the LED turned off all the time. If we consider a typical 3.7 V Lithium Polymer (LiPo) battery with a capacity of 2900 mAh, the node can continuously operate for 7 days.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}