Optimization of Scanning and Counting Sensor Layout for Full Route Observability with a Bi-Level Programming Model

Abstract
:1. Introduction
2. Sensors Location Observability Problem
2.1. Conservation Laws of Traffic Flows
2.2. Counting Sensors Observability
2.3. Scanning Sensors Observability
3. Bi-Level Mathematical Model
3.1. The First Level Model
3.2. The Second Level Model
4. Algorithm for Each Level Model
4.1. Greedy Algorithm for First Level Model
- INPUT: link-route incidence matrix of traffic network topology.
- OUTPUT: set of links to be scanned by scanning sensors.
- Step 1: Initialization-U is the set of selected links and H is link-route incidence matrix.
- ;
- Step 2: Initial differentiating matrix (H_differ)
- generate H_differ by subtraction of two random rows in H.
- Step 3: Greedy process
- While H_differ is not empty
- select the link with maximum of ;
- eliminate all rows involved with link a;
- Step 4: Check coverage
- While H is not empty
- select the link with maximum of ;
- Step 5: Return
4.2. Algorithm for Second Level Model
5. Numerical Experiment
5.1. Nguyen-Dupuis Network
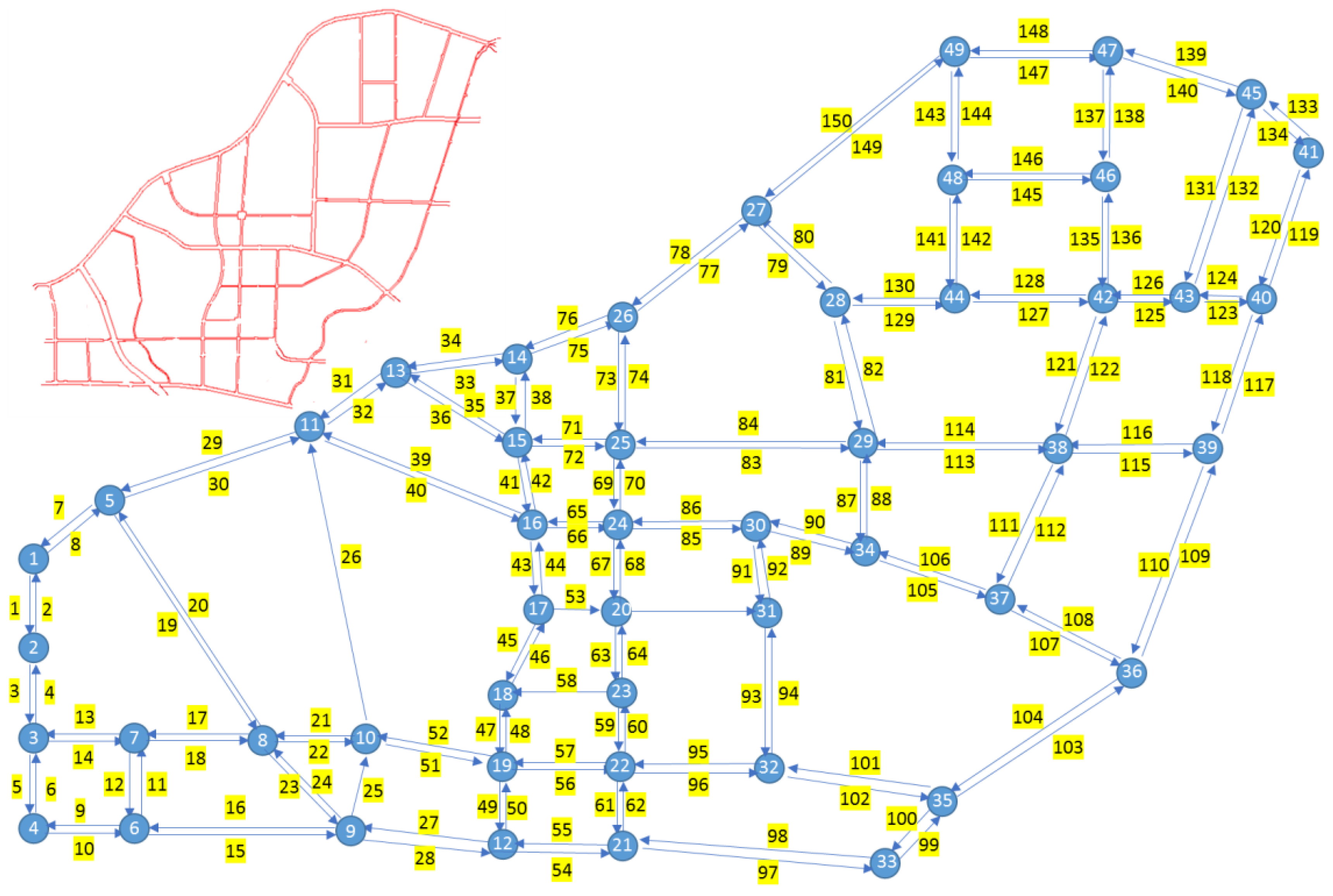
5.2. Case Study
6. Conclusion and Future Research
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
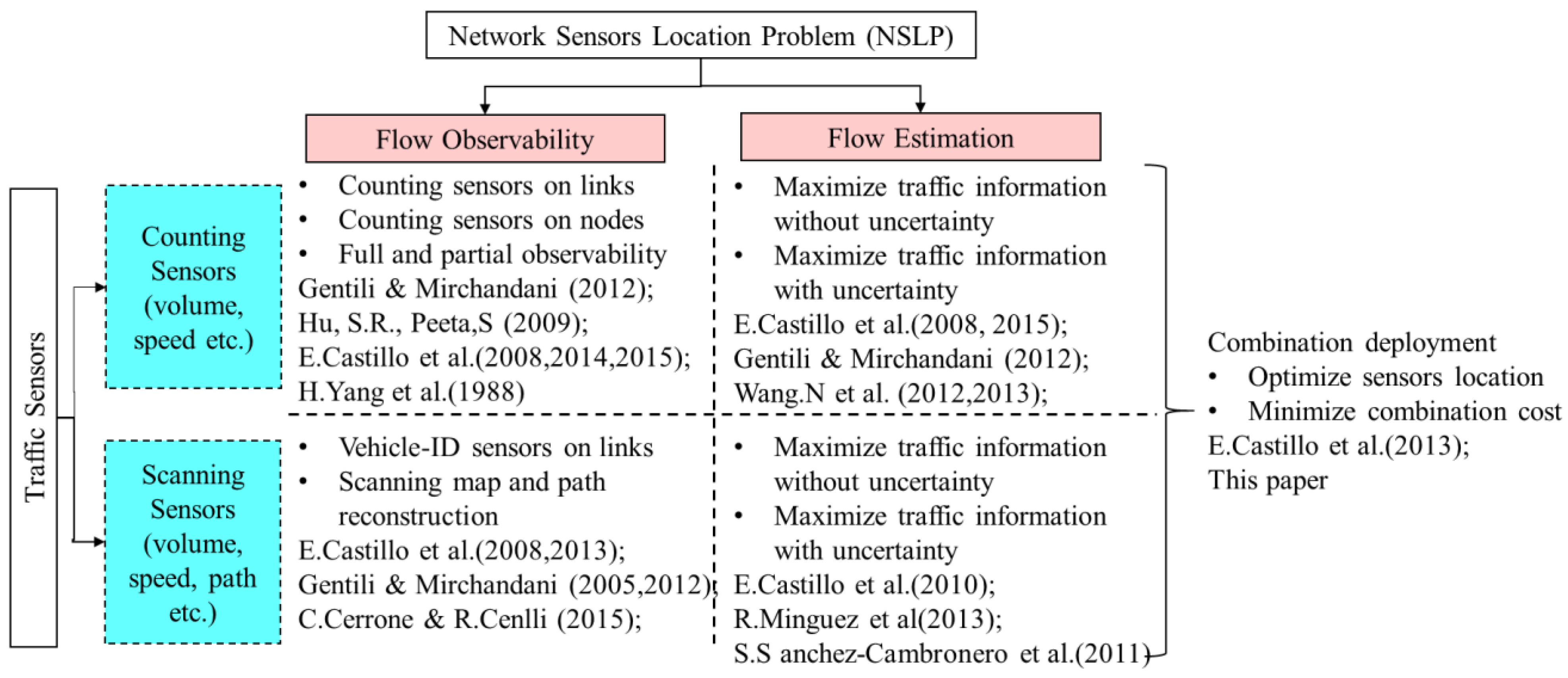
- Gentili, M.; Mirchandani, P.B. Locating sensors on traffic networks: Models, challenges and research opportunities. Transp. Res. Part C 2012, 24, 227–255. [Google Scholar] [CrossRef]
- Castillo, E.; Grande, Z.; Calviño, A.; Szeto, W.Y.; Lo, H.K. A state-of-the-art review of the sensor location, flow observability, estimation, and prediction problems in traffic networks. J. Sens. 2015, 2015, 903563. [Google Scholar] [CrossRef]
- Castillo, E.; Nogal, M.; Rivas, A.; Sáanchez-Cambronero, S. Observability of traffic networks: Optimal location of counting and scanning devices. Transp. B 2013, 1, 68–102. [Google Scholar] [CrossRef]
- Castillo, E.; Calviño, A.; Lo, H.K.; Menéndez, J.M.; Grande, Z. Non-planar hole-generated networks and link flow observability based on link counters. Transp. Res. Part B 2014, 68, 239–261. [Google Scholar] [CrossRef]
- Castillo, E.; Menéndez, J.M.; Sánchez-Cambronero, S. Traffic estimation and optimal counting location without path enumeration using Bayesian networks. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 189–207. [Google Scholar] [CrossRef]
- Castillo, E.; Gallego, I.; Menéndez, J.M.; Rivas, A. Optimal use of plate scanning resources for route flow estimation in traffic networks. IEEE Trans. Intell. Transp. Syst. 2010, 11, 380–391. [Google Scholar] [CrossRef]
- Castillo, E.; Gallego, I.; Sánchez-Cambronero, S.; Rivas, A. Matrix tools for general observability analysis in traffic networks. IEEE Trans. Intell. Transp. Syst. 2010, 11, 799–813. [Google Scholar] [CrossRef]
- Castillo, E.; Menéndez, J.M.; Jiménez, P. Trip matrix and path flow reconstruction and estimation based on plate scanning and link observations. Transp. Res. Part B 2008, 42, 455–481. [Google Scholar] [CrossRef]
- Cerrone, C.; Cerulli, R.; Gentili, M. Vehicle-ID sensor location for route flow recognition: Models and algorithms. Eur. J. Oper. Res. 2015, 247, 618–629. [Google Scholar] [CrossRef]
- Mínguez, R.; Sánchez Cambronero, S.; Castillo, E.; Jiménez, P. Optimal traffic plate scanning location for od trip matrix and route estimation in road networks. Transp. Res. Part B 2010, 44, 282–298. [Google Scholar] [CrossRef]
- Xu, X.; Lo, H.K.; Chen, A.; Castillo, E. Robust network sensor location for complete link flow observability under uncertainty. Transp. Res. Part B 2016, 88, 1–20. [Google Scholar] [CrossRef]
- Klein, L.A. ITS Sensors and Architectures for Traffic Management and Connected Vehicles; CRC Press, Taylor & Francis: Boca Raton, FL, USA, 2017; pp. 125–127. [Google Scholar]
- Fu, C.; Zhu, N.; Ling, S.; Ma, S.; Huang, Y. Heterogeneous sensor location model for path reconstruction. Transp. Res. Part B 2016, 91, 77–97. [Google Scholar] [CrossRef]
- Canudas-de-Wit, C.; Ojeda, L.L.; Kibangou, A.Y. Graph constrained-CTM observer design for the Grenoble south ring. IFAC Proc. Vol. 2012, 45, 197–202. [Google Scholar] [CrossRef]
- Yang, H.; Zhou, J. Optimal traffic counting locations for origin-destination matrix estimation. Transp. Res. Part B 1998, 33, 109–126. [Google Scholar] [CrossRef]
- Hu, S.; Peeta, S.; Chu, C. Identification of vehicle sensor locations for link-based network. Transp. Res. Part B 2009, 43, 873–894. [Google Scholar] [CrossRef]
- Gentili, M.; Mirchandani, P.B. Locating active sensors on traffic networks. Ann. Oper. Res. 2005, 136, 229–257. [Google Scholar] [CrossRef]
- Ng, M.W. Synergistic sensor location for link flow inference without path enumeration: A node-based approach. Transp. Res. Part B 2012, 46, 781–788. [Google Scholar] [CrossRef]
- Sánchez-Cambronero, S.; Castillo, E.; Menéndez, J.M.; Jiménez, P. Dealing with error recovery in traffic flow prediction using Bayesian networks based on license plate scanning data. J. Transp. Eng. 2011, 137, 615–629. [Google Scholar] [CrossRef]
- Wang, N.; Gentili, M.; Mirchandani, P. Model to locate sensors for estimation of static origin-destination volumes given prior flow information. Transp. Res. Rec. 2012, 2283, 67–73. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness; W.H. Freeman: New York, NY, USA, 1979. [Google Scholar]
- Wang, N.; Mirchandani, P. Sensor location model to optimize origin-destination estimation using a Bayesian statistical procedure. Transp. Res. Rec. 2013, 2334, 29–39. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
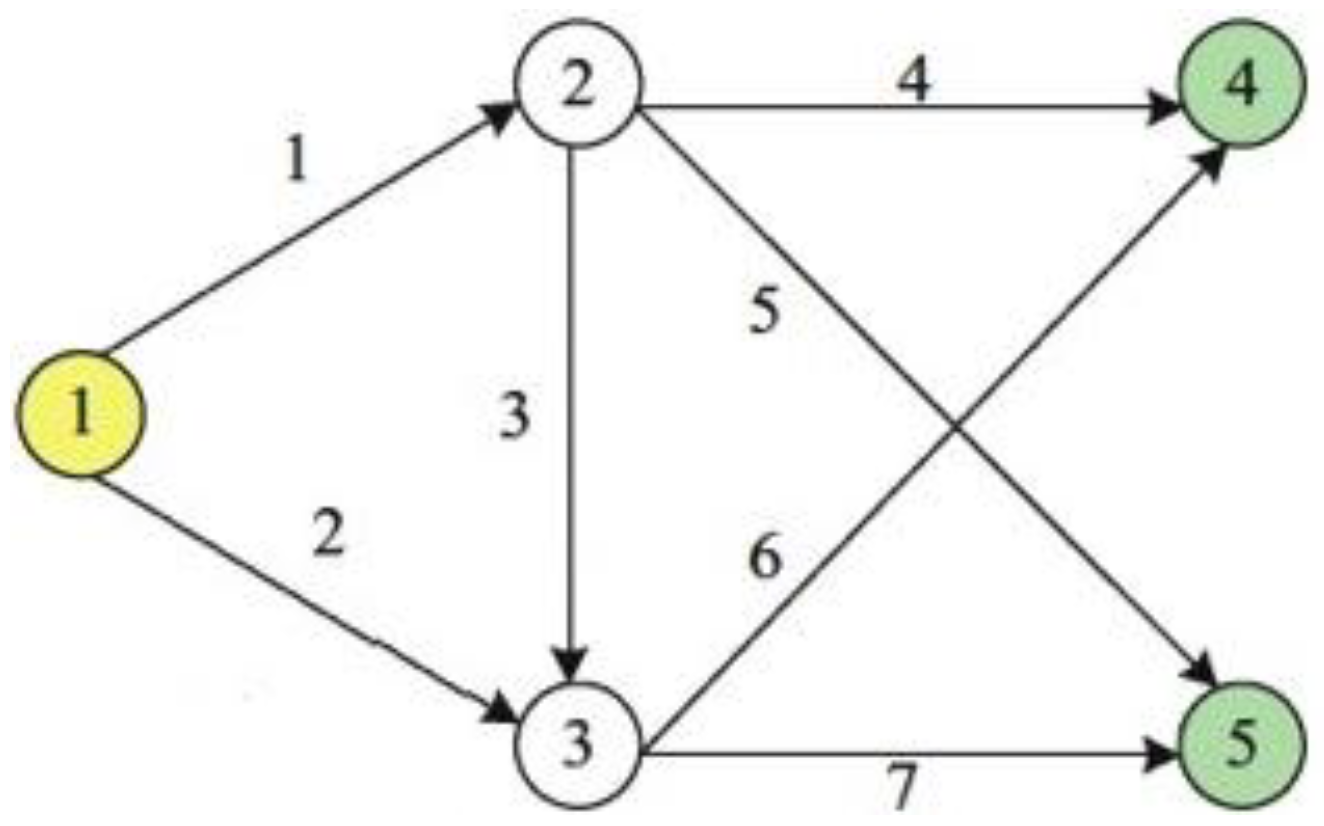
| OD Pair | Routes (ri) | Links |
|---|---|---|
| 1, 4 | r1 | 1, 4 |
| r2 | 1, 3, 6 | |
| r3 | 2, 6 | |
| 1, 5 | r4 | 1, 5 |
| r5 | 1, 3, 7 | |
| r6 | 2, 7 |
| OD Pair | Routes (ri) | Links | |||
|---|---|---|---|---|---|
| 1, 4 | r1 | 1, 4 | {1, 4} | {1, 4} | {1, 4} |
| r2 | 1, 3, 6 | {1, 3} | {1, 6} | {1, 3, 6} | |
| r3 | 2, 6 | {2} | {2, 6} | {2, 6} | |
| 1, 5 | r4 | 1, 5 | {1} | {1} | {1} |
| r5 | 1, 3, 7 | {1, 3} | {1} | {1, 3} | |
| r6 | 2, 7 | {2} | {2} | {2} |
| OD Pair | Routes (ri) | Links | |||||
|---|---|---|---|---|---|---|---|
| 1, 4 | r1 | 1, 4 | {1, 4} | {-} | {-} | {1, 4} | {4} |
| r2 | 1, 3, 6 | {1, 3, 6} | {3, 6} | {3, 6} | {1, 3} | {-} | |
| r3 | 2, 6 | {2, 6} | {2, 6} | {6} | {-} | {-} | |
| 1, 5 | r4 | 1, 5 | {1} | {-} | {-} | {1} | {-} |
| r5 | 1, 3, 7 | {1, 3} | {3} | {3} | {1, 3} | {-} | |
| r6 | 2, 7 | {2} | {2} | {-} | {-} | {-} |
| 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | |||
| 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | |||
| 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | |||
| 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | |||
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | |||
| 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | |||
| 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | |||
| N_re = 1 | 3, 4, 6, 2 | 1, 3, 4, 6 | 1, 4, 6, 2 | 1, 3, 6, 2 | 1, 3, 4, 2 | ||||||
| Full-rank? | 1 | 1 | 0 | 0 | 0 | ||||||
| 1 | 1 | --- | --- | --- | |||||||
| Combination | 3, 4, 6, 2 | 1, 3, 4, 6 | |||||||||
| 1 | 2 | ||||||||||
| N_re = 2 | 4, 6, 2 | 3, 6, 2 | 3, 4, 6 | 3, 4, 2 | 1, 3, 4 | 1, 4, 6 | 1, 3, 6 | 1, 3, 4 | 1, 6, 2 | 1, 4, 2 | |
| Full-rank? | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 1 | 1 | --- | --- | --- | --- | --- | --- | --- | ||
| Combination | 4, 6, 2 | 3, 6, 2 | 3, 4, 6 | ||||||||
| 1, 3 | 1, 4 | 1, 2 | |||||||||
| N_re = 3 | 3, 6 | 2, 6 | 1, 3 | 1, 4 | 1, 6 | 1, 2 | 3, 4 | 3, 2 | 4, 6 | 4, 2 | |
| Full-rank? | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 1 | --- | --- | --- | --- | --- | --- | --- | --- | ||
| Combination | 3, 6 | 2, 6 | |||||||||
| 1, 2, 4 | 1, 3, 4 |
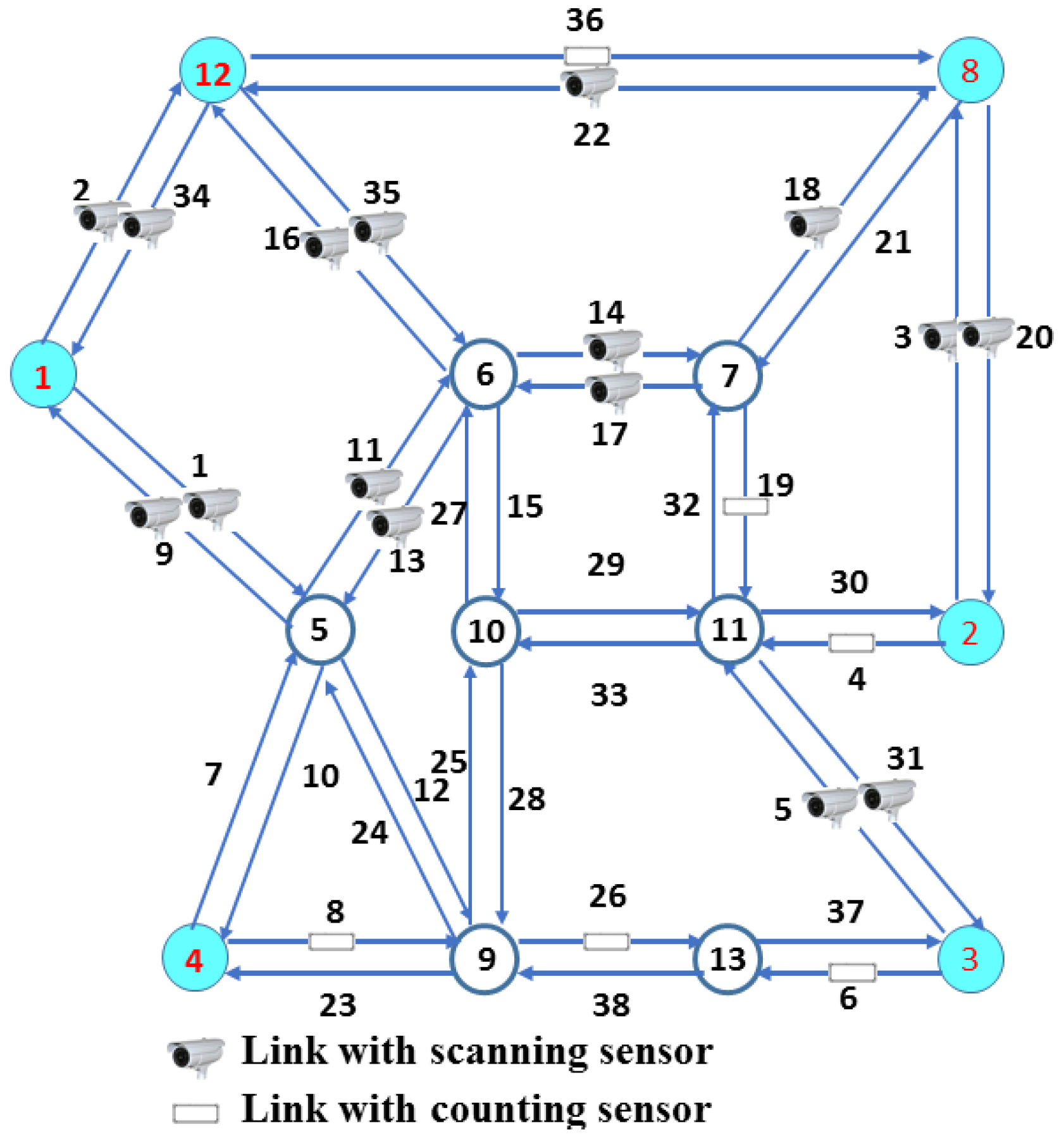
| O-D | Route | Links | OD | Route | Links | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1–2 | 1 | 1 | 11 | 14 | 18 | 20 | 3–1 | 26 | 6 | 38 | 24 | 9 | |||
| 1–2 | 2 | 2 | 35 | 14 | 18 | 20 | 3–4 | 27 | 5 | 33 | 28 | 23 | |||
| 1–2 | 3 | 2 | 36 | 20 | 3–4 | 28 | 6 | 38 | 23 | ||||||
| 1–3 | 4 | 1 | 11 | 14 | 19 | 31 | 3–12 | 29 | 5 | 32 | 17 | 16 | |||
| 1–3 | 5 | 1 | 11 | 15 | 29 | 31 | 3–12 | 30 | 5 | 33 | 27 | 16 | |||
| 1–3 | 6 | 1 | 12 | 25 | 29 | 31 | 4–2 | 31 | 7 | 11 | 14 | 18 | 20 | ||
| 1–3 | 7 | 1 | 12 | 26 | 37 | 4–2 | 32 | 8 | 25 | 29 | 30 | ||||
| 1–3 | 8 | 2 | 35 | 14 | 19 | 31 | 4–2 | 33 | 8 | 25 | 29 | 32 | 18 | 20 | |
| 1–3 | 9 | 2 | 35 | 15 | 29 | 31 | 4–3 | 34 | 8 | 25 | 29 | 31 | |||
| 1–8 | 10 | 1 | 11 | 14 | 18 | 4–3 | 35 | 8 | 26 | 37 | |||||
| 1–8 | 11 | 2 | 35 | 14 | 18 | 4–8 | 36 | 7 | 11 | 14 | 18 | ||||
| 1–8 | 12 | 2 | 36 | 4–8 | 37 | 8 | 25 | 29 | 32 | 18 | |||||
| 2–1 | 13 | 3 | 21 | 17 | 13 | 9 | 8–1 | 38 | 21 | 17 | 13 | 9 | |||
| 2–1 | 14 | 3 | 21 | 17 | 16 | 34 | 8–1 | 39 | 21 | 17 | 16 | 34 | |||
| 2–1 | 15 | 3 | 22 | 34 | 8–1 | 40 | 22 | 34 | |||||||
| 2–4 | 16 | 3 | 21 | 17 | 13 | 10 | 8–4 | 41 | 21 | 17 | 13 | 10 | |||
| 2–4 | 17 | 3 | 21 | 19 | 33 | 28 | 23 | 8–4 | 42 | 21 | 19 | 33 | 28 | 23 | |
| 2–4 | 18 | 4 | 33 | 28 | 23 | 8–12 | 43 | 21 | 17 | 16 | |||||
| 2–12 | 19 | 3 | 21 | 17 | 16 | 8–12 | 44 | 22 | |||||||
| 2–12 | 20 | 3 | 22 | 12–2 | 45 | 35 | 14 | 18 | 20 | ||||||
| 3–1 | 21 | 5 | 32 | 17 | 13 | 9 | 12–2 | 46 | 36 | 20 | |||||
| 3–1 | 22 | 5 | 32 | 17 | 16 | 34 | 12–3 | 47 | 35 | 14 | 19 | 31 | |||
| 3–1 | 23 | 5 | 33 | 27 | 13 | 9 | 12–3 | 48 | 35 | 15 | 29 | 31 | |||
| 3–1 | 24 | 5 | 33 | 27 | 16 | 34 | 12–8 | 49 | 35 | 14 | 18 | ||||
| 3–1 | 25 | 5 | 33 | 28 | 24 | 9 | 12–8 | 50 | 36 | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, D.; Sun, X.; Liu, J.; Sun, M. Optimization of Scanning and Counting Sensor Layout for Full Route Observability with a Bi-Level Programming Model. Sensors 2018, 18, 2286. https://doi.org/10.3390/s18072286
Shan D, Sun X, Liu J, Sun M. Optimization of Scanning and Counting Sensor Layout for Full Route Observability with a Bi-Level Programming Model. Sensors. 2018; 18(7):2286. https://doi.org/10.3390/s18072286
Chicago/Turabian StyleShan, Donghui, Xiaoduan Sun, Jianbei Liu, and Ming Sun. 2018. "Optimization of Scanning and Counting Sensor Layout for Full Route Observability with a Bi-Level Programming Model" Sensors 18, no. 7: 2286. https://doi.org/10.3390/s18072286
APA StyleShan, D., Sun, X., Liu, J., & Sun, M. (2018). Optimization of Scanning and Counting Sensor Layout for Full Route Observability with a Bi-Level Programming Model. Sensors, 18(7), 2286. https://doi.org/10.3390/s18072286